for the On behalf of the GEBCO-NF Alumni Team Jaya Roperez Modified presentation of Dr Rochelle Wigley
|
|
|
- Audra Flowers
- 6 years ago
- Views:
Transcription



1 for the On behalf of the GEBCO-NF Alumni Team Jaya Roperez Modified presentation of Dr Rochelle Wigley




2 The inspiration to enter as a team for the challenge: Opening speech by Mr Sasakawa Argued for ongoing alumni development & projects Jyotika Virmani, Senior Director in Prize Operations, at XPRIZE said at the Forum NF GEBCO training program is probably the most successful Sunknown capacity-building global initiative 15 to 17 June 2016 in the Principality of Monaco June 2016 Mr Sasakawa, Chairman of the Nippon Foundation Proposed to map 100% of the topography of the World Ocean by 2030 June 2017 Nippon Foundation - GEBCO Seabed 2030 Project announced Mr Sasakawa 1 of 8 IOC-UNESCO Champions of Global Ocean Science

3 A $7 million global competition challenging teams to advance deep-sea technologies for autonomous, fast and high-resolution ocean exploration. Create solutions that advance the autonomy, scale, speed, depths and resolution of ocean exploration
4 The key elements of the challenge 1. Create an autonomous solution to collect data 2. All components used for data gathering must fit within a standard 40 ft shipping container 3. Produce a high-resolution bathymetric map of an area of 100 km 2 (5 m horizontal and 0.5 m vertical resolution) 4. Produce images of a specified object 5. Identify and image five archeological, biological or geological features Data collection must be completed in 16 hours with 48 hours for product generation


5 Meeting global challenges Nippon Foundation - GEBCO Seabed 2030 Produce: Bathymetric grids where no features of the accessible parts of the World Ocean floor larger than 100 m remains to be portrayed. Challenges: Keeping up with technology





6 The Postgraduate Certificate in Ocean Bathymetry Designed to train a new generation of scientists and hydrographers in ocean bathymetry The Center for Coastal and Ocean Mapping /Joint Hydrographic Center University of New Hampshire, USA 84 scholars from 37 coastal states over last 14 years



7 GEBCO-NF Alumni Team: 12 active alumni 10 different coastal states & 8 years of training program Industry Partners: - Kongsberg Maritime - Ocean Floor Geophysics - Hushcraft Ltd - University of New Hampshire - OceanAero - Teledyne CARIS 4 technical advisors from within GEBCO
8 The GEBCO-NF Alumni Team concept Integrates existing technology with innovative new ideas Hushcraft Limited USV Sea-Kit XP with KM HiPAP 351P-MGC Unmanned operations by KM Kongsberg Maritime HUGIN 1000 AUV OFG Chercheur AUV (3,000 m) High quality seafloor bathymetry and imagery Combination of EM2040 MBES, HISAS sidescan wide-area and HISAS bathymetry & spotfocused HiSAS imagery
9 Management Group Unmanned Surface Vessel Autonomous Underwater Vehicle Data Group AUV Sea Trials System integration
10 Decision to register a XPRIZE team June First discussion with boat designer Sept meeting 5 Oct meeting 3 Nov Shell Ocean Discovery XPRIZE summit Nov Submission of technical documents 17 Dec Through to Round 1 7 Feb 27 Feb Submission to Nippon Foundation 16 March Round 1 funded by NF / SPF - $3.25M 22 March meeting 6 April * meeting April First installment of funds Metal cut for Boat Build 21 April Data Group: 2 week visit AUV arrives in Norway AUV tests with chase boat Storm AUV & Data Team sea-trials in Norway SEA-KIT christened USV Maxlimer USV Maxlimer s first wet test USV Maxlimer in Norway USV Maxlimer K-Mate development & trials First USV AUV trials: Testing HiPAP First AUV retrieval Start of final sea trials 22 April 26 April May 2 June 24 July 7 Aug 14 Aug 19 Aug 24 Aug 1 Sept 2 Sept 14 Sept 18 Sept * 27 Sept 3 Oct 3 Nov 20 Nov Project Time Line 2016 SEA-KIT delivered 28 June meeting meeting K-MATE contract 2 nd installment of funds ($2,741,500) Technology readiness test OFG contract 30 June 2017
11 The GEBCO-NF Alumni Team concept Integrates existing technology with innovative new ideas Hushcraft Limited USV Sea-Kit XP with KM HiPAP 351P-MGC Unmanned operations by KM Kongsberg Maritime HUGIN 1000 AUV OFG Chercheur AUV (3,000 m) High quality seafloor bathymetry and imagery Combination of EM2040 MBES, HISAS sidescan wide-area and HISAS bathymetry & spotfocused HiSAS imagery





12 Proprietary Information USV SEA-KIT: Unmanned surface utility craft The GEBCO-NF Team plans o n combining existing technology with innovative new ideas. Designed as mother vessel for AUV fitting in 40 ft container Exclusion area safety vessel Border Safety / Patrol vessel Rapid survey deployment Passive Acoustic Monitoring Acoustic positioning USBL Ocean Data Collection Platform Communications Repeater Station




13 SEA-KIT 01 BUILD The start of construction with metal for the hull being cut (21 April 2017) Delivery of completed hull (28 June 2017) USV at work shop ready for wet test ( 31 August 2017)






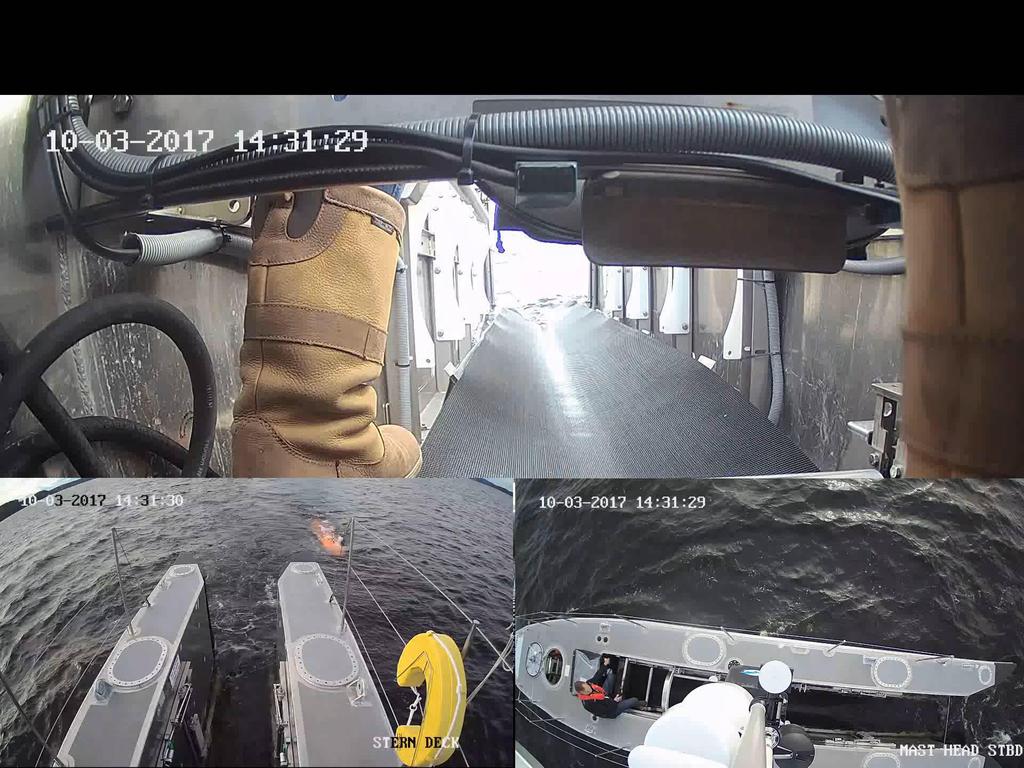
14 Christened USV Maxlimer - 1 Sept 2017 FIRST WET TESTS IN UK
15 SEA-KIT for Shell Ocean Discovery XPRIZE SEA-Kit Dimensions: Fully redundant propulsion and communication systems Two independent power supplies and power charge Length: m (38.55 ft) Beam: 2.2 m (7.22 ft) Transport Height: 2.0 m (6.56 ft) - Operational Height: 7 m (22.97 ft) Weight: 11,200 kg (estimated) Propulsion: 2 X 10 kw / 1200 rpm electric directional thrust motors Communication: Wi-Fi, Radio, Satellite (Iridium and Inmarsat) and Kongsberg Maritime Broadband Radio (<45 km offshore) CCTV: 2 interior and 6 fore and aft cameras, 1 night-vision camera Generator 2 X 18 kw 48 V DC Fuel 2,000 L 56 Gel and Absorbent Glass Mat (AGM) types of valve-regulated lead-acid battery (VRLA) Marine Batteries, 12 V 214 Ah capacity 4 dry cell Absorbed Glass Matt (AGM) VRLA 12 V 100 Ah Marine Dual Purpose Batteries for the engine and propulsion


16 SEA-KIT Communication & Navigation Remote control antennae Kongsberg Seapath 130 GPS antenna Wind Sensor & AIS antenna Kongsberg MBR Wifi and Radio antennae for AUV (OFG) & Iridium antenna HS70 GPS compass Simrad 4G radar & GPS for Iridium Loud hailer: anti-hijack! HIPAP 351P-MGC Transducer Inmarsat SAILOR 500 FleetBroadband
17 SEA-KIT for Shell Ocean Discovery XPRIZE Modes of Operation 1. Unmanned, partly autonomous (Kongsberg Maritime AS K-MATE) 2. Remote control (joystick) 3. Manned



18 USV Maxlimer on her way to Norway Unpacking SEA-KIT container in Horten, Norway 8 Sept Sept 2017
19 The GEBCO-NF Alumni Team concept Integrates existing technology with innovative new ideas Hushcraft Limited USV Sea-Kit XP with KM HiPAP 351P-MGC Unmanned operations by KM Kongsberg Maritime HUGIN 1000 AUV OFG Chercheur AUV (3,000 m) High quality seafloor bathymetry and imagery Combination of EM2040 MBES, HISAS sidescan wide-area and HISAS bathymetry & spotfocused HiSAS imagery
20 Ocean Floor Geophysics Capabilities: Deep water AUV operations and data acquisition for infrastructure inspection and survey * Route and Site Surveys * Pipeline Inspection *Mineral Exploration * Decommissioning Survey * Archeology and Salvage * Seafloor Search * Environmental Baseline Studies * Seafloor Classification * Unexploded Ordinance * Physical Oceanography Electromagnetic mapping and Magnetic 2D & 3D surveys Geo-chemical prospecting and mapping surveys Gravity and inversion post processing (ROV/AUV borne) Sensor Development - Self Compensating Magnetometer (SCM) System for real-time compensated magnetic data.




21 WHY OFG: OFG Personnel have diverse AUV Experience - Operations, System Integration and Design Mission Planning Selection, Design, and Integration of Sensors R&D background Similar philosophical approach
 Sub-Bottom Profiler: EdgeTech DW 106 SBP Navigation Sensors IMU: Honeywell HG9900 Compass: Leica DMC DVL: Teledyne RDI Workhorse Navigator 300 khz Altimeter: Kongsberg Mesotech 675 khz")
22 Chercheur HUGIN 1000 AUV Specs General Rating: 5-3,000 m Length: 5.5 m Weight in Air: 1,200 kg Neutrally buoyant Sensors SAS: Kongsberg Maritime HISAS 1032 MBES: EM khz (0.7 x 0.7 beam width) Sub-Bottom Profiler: EdgeTech DW 106 SBP Navigation Sensors IMU: Honeywell HG9900 Compass: Leica DMC DVL: Teledyne RDI Workhorse Navigator 300 khz Altimeter: Kongsberg Mesotech 675 khz down looking Forward Looking Sonar: Imagenex MBES sonar CTD: SAIV CTD USBL: HiPAP Transponder Depth Sensor: DigiQuartz 8CB4000 GPS Receiver: Novatel Power 3 batteries (24 kwh) Endurance estimates: 37 3 kts & 27 4kts



23 THANK YOU to Kongsberg Maritime in Horten, Norway for supporting us through 2 months of sea-trials
24 AUV Sea-trials: To maximize coverage and resolution Data group and OFG operators acquired bathymetric and side-scan data, as well as sub-bottom profiles. The data was collected during 12 dives in 4 weeks. Included: DVL calibrations Patch tests separately for EM2040 and HISAS 1032 Various operational modes: getting wide-area side scan bathymetry operational (KM input), testing standard HISAS bathymetry and HISAS imagery Data collection different altitudes and speeds







25


 2.")
26 Data Group Focus on Automated Data Flow Masa worked with Teledyne CARIS to understand: 1. AUV work flow in processing HISAS data & EM2040 data (Ms. Fernanda Viana Da Conceicao) 2. Developed automated work flow based on CARIS processing tools Fine-tuned and further developed during sea trials at Kongsberg Maritime CARIS output will be imported into ArcGIS 1. Analysis of bathymetric data (contours, slope etc.) 2. Publishing of image services in ArcGIS Online 3. Collection of bathymetric data available from internet sources



 Side scan image: = ~")
27 HUGIN 1000 with HISAS 1032 Data Collection STANDARD HISAS MODE: Distance-triggered Swath width: ± 200 m (400 m) Side scan image: = ~ 4 cm HISAS Bathymetry Resolution: = 1 m HISAS Spot Bathymetry Resolution: = 10 cm Speed: = 3.9 knots (2.0 m/s) WIDE-AREA (SIDE-SCAN) MODE: Time-triggered Swath width: ± 375 m (750 m) Side scan image: = ~ 1-2 m Bathymetry Resolution: = ~2 m Speed: = 4.3 knots (2.2 m/s)
28 WIDE AREA MODE Bathymetric Side-Scan Method Physical beam width is worse at outer beam : ~1-2 m resolution Wider Swath Width: 750 m. SAS Physical beam (yellow) width is homogeneous: ~4 cm resolution Standard HISAS MODE Synthetic Aperture Sonar (SAS) Method Narrower Swath Width: 400 m Virtual Long Array = Synthetic Aperture Array For wide area bathymetry For seafloor feature detection 60 m elevation 40 m elevation EM2040 Wide Area Mode Wide Area Mode HISAS EM2040 HISAS
29 AUV Chercheur Data types Sonar File type Data Resolution EM2040 *.all Bathymetry & Imagery <1 m HISAS (Standard) *.all Port and Starboard Bathymetry 1 m HISAS (Standard) *.xtf Imagery 4 cm HISAS (Standard) HISAS (Standard) *.all HISAS (Wide-area) *.all raw data Port and Starboard Spot Bathymetry Port and Starboard Spot Imagery Port and Starboard Bathymetry 10 cm ~2-4 cm 2 m HISAS (Wide-area) *.xtf Imagery 1-2 m
30 Kongsberg Proprietary software FOCUS & REFLECTIONS takes raw HISAS data and produces.all &.xtf for input into CARIS Simplified data work flow Port HISAS Starboard HISAS EM2040 CARIS processing CARIS processing Cube Surface Mosaic Imagery.bag file &.geotiff ArcGIS Online NavLab data HiPAP positioning Tide data (published) Port HISAS Starboard HISAS FOCUS Reflections Spot Imagery KM REFLECTIONS produces best quality spot imagery using in-house algorithms on raw data files (for 20, 50 or 100 m 2 areas)
31 DETAILED EXAMPLE: HISAS wide-area mode work flow Import NavLab files for TPU only Import PORT *.all files Import STBD *.all files TPU CUBE surface Output BAG & Geotiff Want to know more speak to Masanao Sumiyoshi


 Data")
32 EM2040 data Nadir fill Approximate total swath width = 200 m (120 swath & 400 beams at 60 m altitude) Data resolution 1 m



33 HISAS Wide-Area Test 30 m AUV altitude 60 m AUV altitude Nadir Outer swath Nadir Better S/N 300 m half swath 300 m half swath Outer swath 60 m AUV altitude +/- 390 m (780 m full swath)
![Patch Test for HISAS Wide-Area [PORT] Roll:](/docs-images/77/76159953/images/34-0.jpg "+0.225 degree [STBD] Roll: +0.")
34 Patch Test for HISAS Wide-Area [PORT] Roll: degree [STBD] Roll: degree 1 m 1 m

35 Data density: Different HISAS modes Standard HISAS 0.5 m along track spacing Wide-area mode ~1.5 m along track spacing Both modes: 1 m across track spacing



36 HISAS wide-area mode with EM2040 nadir gap filling
37 Coverage Estimates Standard HISAS: 2.7 km 2 /hour HISAS wide-area side-scan: 6.2 km 2 /hour This includes EM2040 nadir gap data The Team plan for XPRIZE was to run various AUV modes: 13 hours of HISAS wide-area mode (80.3 km 2 ) 2 hours of standard HISAS mode (5.4 km 2 ) = ~86% of required coverage

38 EM2040 backscatter vs. HISAS imagery XP_Shipwreck.gif
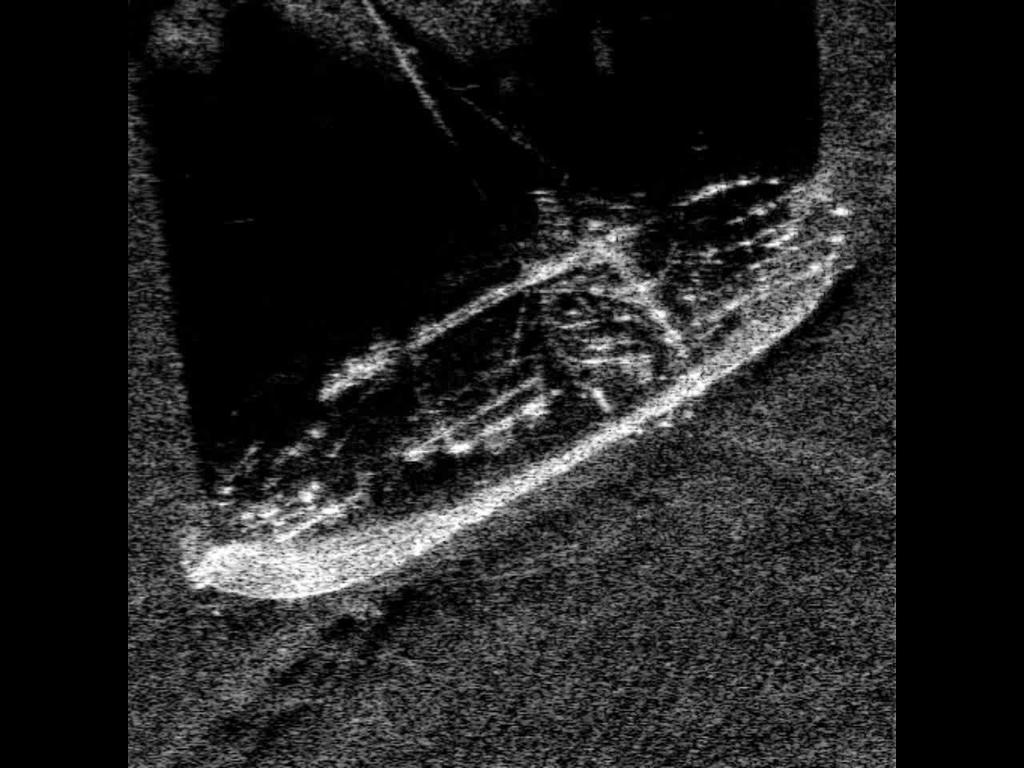
39 XP_Wreck_sasi.gif


40 Only wreck covered using HISAS mode more to come.. HISAS Imagery HISAS Spot Imagery Shipwreck 20 m Length; 5 m Beam in ~200 m water depths



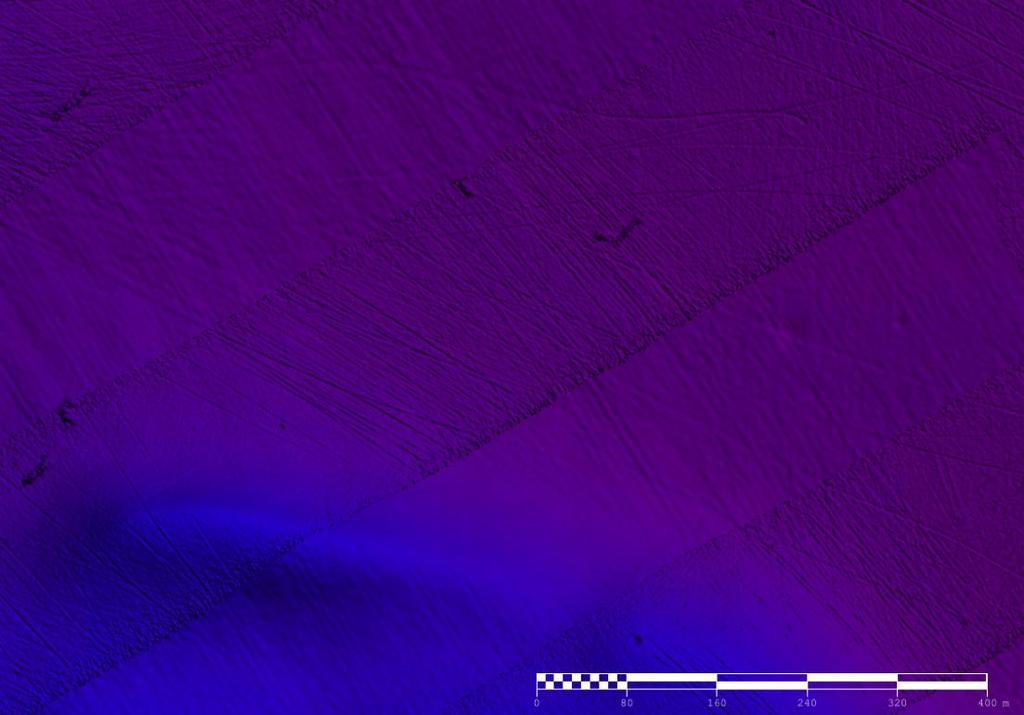
41 Dive 12 surface (1 m resolution) based on HISAS wide area, HISAS and EM2040 data
42 The GEBCO-NF Alumni Team concept Integrates existing technology with innovative new ideas Hushcraft Limited USV Sea-Kit XP with KM HiPAP 351P-MGC Unmanned operations by KM Kongsberg Maritime HUGIN 1000 AUV OFG Chercheur AUV (3,000 m) High quality seafloor bathymetry and imagery Combination of EM2040 MBES, HISAS sidescan wide-area and HISAS bathymetry & spotfocused HiSAS imagery










43 More pictures to follow On hard-drive at home
44















45 THANK YOU





46
Yulia Zarayskaya Rochelle Wigley
 for the On behalf of the GEBCO-NF Alumni Team Yulia Zarayskaya geozar@yandex.ru Geological Institute RAS Rochelle Wigley rochelle@ccom.unh.edu Center for Coastal and Ocean Mapping Non-profit organization
for the On behalf of the GEBCO-NF Alumni Team Yulia Zarayskaya geozar@yandex.ru Geological Institute RAS Rochelle Wigley rochelle@ccom.unh.edu Center for Coastal and Ocean Mapping Non-profit organization
Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer. James Hailstones, ASV, Ltd.
 Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer James Hailstones, ASV, Ltd. Introduction Company ~70 employees worldwide. ASV established in 2010. ASV operations in USA
Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer James Hailstones, ASV, Ltd. Introduction Company ~70 employees worldwide. ASV established in 2010. ASV operations in USA
SeaRobotics Facility. Integrated Facility for the Design and Build and Test. Location. Facility. Test Capability
 1 SeaRobotics Facility Location Located in Stuart, Florida 26 miles north of Riviera Beach ¼ mile from I-95 Facility 1400 square meters in Treasure Coast Commerce Park 400 m2, Engineering, Integration
1 SeaRobotics Facility Location Located in Stuart, Florida 26 miles north of Riviera Beach ¼ mile from I-95 Facility 1400 square meters in Treasure Coast Commerce Park 400 m2, Engineering, Integration
UNDERWATER SOLUTIONS WORLDWIDE
 UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
DeepOcean Superior ROV
 DeepOcean Superior ROV combining high speed acoustic surveys and visual inspection Subops Haugesund 5 th August 2015 - Making a difference Company snapshot Vessels ROVs Trenchers & Ploughs Owned: 7 Long
DeepOcean Superior ROV combining high speed acoustic surveys and visual inspection Subops Haugesund 5 th August 2015 - Making a difference Company snapshot Vessels ROVs Trenchers & Ploughs Owned: 7 Long
Hydrographic society
 Hydrographic society We Design, Build and Operate Unmanned Marine Systems Make a disruptive, revolutionary change to working at sea: - Reduce costs - Improve operational flexibility - Reduce risk to human
Hydrographic society We Design, Build and Operate Unmanned Marine Systems Make a disruptive, revolutionary change to working at sea: - Reduce costs - Improve operational flexibility - Reduce risk to human
The new generation pipeline surveys
 The new generation pipeline surveys MMT Founded in 1976 Offices in Gothenburg, Sweden & Banbury, UK 250 + staff 7 Survey & ROV vessels Reach Subsea AS Founded 2008 Office in Haugesund 65 + staff 6 WROVs
The new generation pipeline surveys MMT Founded in 1976 Offices in Gothenburg, Sweden & Banbury, UK 250 + staff 7 Survey & ROV vessels Reach Subsea AS Founded 2008 Office in Haugesund 65 + staff 6 WROVs
Ocean Class AGOR Program Acquisition Status 11 February 2013
 Program Acquisition Status 11 February 2013 Prepared For: RVTEC Mr. Christopher MacDonald Assistant PM PMS325Q9 Mr. Tim Schnoor ONR 321RF Mr. Mike Prince ONR 321RF Key Characteristics: Hull Material Length
Program Acquisition Status 11 February 2013 Prepared For: RVTEC Mr. Christopher MacDonald Assistant PM PMS325Q9 Mr. Tim Schnoor ONR 321RF Mr. Mike Prince ONR 321RF Key Characteristics: Hull Material Length
Ocean Class AGOR. Baseline and Priorities Mission Equipment Specification (MES) 13 October 2010
 13 October 2010") Ocean Class AGOR Baseline and Priorities Mission Equipment Specification (MES) 13 October 2010 Baseline MES Strategy Ocean Class AGOR designs are being developed based on the MES contract attachment. This
Ocean Class AGOR Baseline and Priorities Mission Equipment Specification (MES) 13 October 2010 Baseline MES Strategy Ocean Class AGOR designs are being developed based on the MES contract attachment. This
1 of 5 4/19/11 2:15 PM
 Top Page > About JAMSTEC > Research Vessels, Facilities and Equipment > Research Vessels and Vehicles > URASHIMA Research, Development and Promotion Research Vessels, Facilities and Equipment Research
Top Page > About JAMSTEC > Research Vessels, Facilities and Equipment > Research Vessels and Vehicles > URASHIMA Research, Development and Promotion Research Vessels, Facilities and Equipment Research
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Design of SPARUS II AUV
 Design of SPARUS II AUV Underwater Robotics Research Centre (CIRS) Computer Vision and Robotics Institute Universitat de Girona, 17003, Girona, Spain. web: http://cirs.udg.edu Contact person: Marc Carreras
Design of SPARUS II AUV Underwater Robotics Research Centre (CIRS) Computer Vision and Robotics Institute Universitat de Girona, 17003, Girona, Spain. web: http://cirs.udg.edu Contact person: Marc Carreras
Fred. Olsen POWER GENERATION AT SEA. Autonomous Sea Power. Fred.Olsen Ltd.
 Author: Even Hjetland even.hjetland@fredolsen.no Date: Dec. 12th 2017 Revision: Type: Q For email/download Fred. Olsen Autonomous Sea Power POWER GENERATION AT SEA POWER SUPPLY AND COMMUNICATION PLATFORM
Author: Even Hjetland even.hjetland@fredolsen.no Date: Dec. 12th 2017 Revision: Type: Q For email/download Fred. Olsen Autonomous Sea Power POWER GENERATION AT SEA POWER SUPPLY AND COMMUNICATION PLATFORM
Authors: HEFFRON Erin 1, DOUCET Maurice 1, GEE Lindsay 1, WEBER Tom 2, MAYER Larry 2 and BEAUDOIN Jonathon 2
 Title: What s the Difference? A Comparison of Water Column Data to Bathymetry From the Sonar Bottom Detection in the Shallow Survey 2012 Common Dataset Authors: HEFFRON Erin 1, DOUCET Maurice 1, GEE Lindsay
Title: What s the Difference? A Comparison of Water Column Data to Bathymetry From the Sonar Bottom Detection in the Shallow Survey 2012 Common Dataset Authors: HEFFRON Erin 1, DOUCET Maurice 1, GEE Lindsay
The Rise of Maritime Autonomous Systems. Richard Daltry CEng, MRINA Technical Director, ASV
 The Rise of Maritime Autonomous Systems Richard Daltry CEng, MRINA Technical Director, ASV The Rise of Maritime Autonomous Systems (MAS) Contents Overview of ASV The development of Maritime Autonomous
The Rise of Maritime Autonomous Systems Richard Daltry CEng, MRINA Technical Director, ASV The Rise of Maritime Autonomous Systems (MAS) Contents Overview of ASV The development of Maritime Autonomous
"It is more than the fuel matters The Full Picture integrated solutions"
 "It is more than the fuel matters The Full Picture integrated solutions" Image: Qatar Gas Polish - Norwegian Maritime Business Forum, September 3-4, 2013, Gdańsk, Poland / 1/ 17-Sep-13 WORLD CLASS through
"It is more than the fuel matters The Full Picture integrated solutions" Image: Qatar Gas Polish - Norwegian Maritime Business Forum, September 3-4, 2013, Gdańsk, Poland / 1/ 17-Sep-13 WORLD CLASS through
Prepared For RVTEC. Ocean Class AGOR Program Program Status 19 November 2013
 Prepared For RVTEC Ocean Class AGOR Program Program Status 19 November 2013 Ocean Class AGOR Names Armstrong Class R/Vs R/V Neil Armstrong (AGOR 27) R/V Sally Ride (AGOR 28) Tuesday, September 25, 2012
Prepared For RVTEC Ocean Class AGOR Program Program Status 19 November 2013 Ocean Class AGOR Names Armstrong Class R/Vs R/V Neil Armstrong (AGOR 27) R/V Sally Ride (AGOR 28) Tuesday, September 25, 2012
Wave Energy for Powering Science. VIMS Industry Partnership Meeting. February 17, 2012
 Wave Energy for Powering Science VIMS Industry Partnership Meeting February 17, 2012 Company Overview Commenced Operations: 1994 Incorporation: Delaware, USA Operating Locations: Pennington, NJ, USA and
Wave Energy for Powering Science VIMS Industry Partnership Meeting February 17, 2012 Company Overview Commenced Operations: 1994 Incorporation: Delaware, USA Operating Locations: Pennington, NJ, USA and
Underwater Acoustics. History and latest technology. Science and Geopolitcs of Himmalaya- Arctic- Antarctic. Tonny Algroey, Kongsberg Maritime
 Underwater Acoustics History and latest technology Science and Geopolitcs of Himmalaya- Arctic- Antarctic Tonny Algroey, Kongsberg Maritime Agenda Introduction to KONGSBERG Underwater acoustics what is
Underwater Acoustics History and latest technology Science and Geopolitcs of Himmalaya- Arctic- Antarctic Tonny Algroey, Kongsberg Maritime Agenda Introduction to KONGSBERG Underwater acoustics what is
A comparison of multibeam backscatter from the SS2012 Common Dataset
 A comparison of multibeam backscatter from the SS2012 Common Dataset Everyone wants backscatter Always there but never been used Now specified in everything Hydrographic Survey, Renewable Surveys, Oil
A comparison of multibeam backscatter from the SS2012 Common Dataset Everyone wants backscatter Always there but never been used Now specified in everything Hydrographic Survey, Renewable Surveys, Oil
KYSTDESIGN SUPPORTER Work Class ROV
 KYSTDESIGN SUPPORTER Work Class ROV Heavy duty work class ROV 150 Hp HPU 3000 m depth rated Through frame lift capacity of 3 t Top hat TMS with 500 m tether capacity Interface prepared for advanced survey
KYSTDESIGN SUPPORTER Work Class ROV Heavy duty work class ROV 150 Hp HPU 3000 m depth rated Through frame lift capacity of 3 t Top hat TMS with 500 m tether capacity Interface prepared for advanced survey
3.1 Geophysical Processing Procedures
 APPENDIX 3 GEOPHYSICS FLEDERMAUS AND GEOCODER TOOLKIT PROCESSING PROCEEDURES FOR HABITAT MAPPING FOR NMP VERIFICATION PROGRAMME AREA 1, SANDPIPER PHOSPHATE PROJECT Prepared for: Namibian Marine Phosphate
APPENDIX 3 GEOPHYSICS FLEDERMAUS AND GEOCODER TOOLKIT PROCESSING PROCEEDURES FOR HABITAT MAPPING FOR NMP VERIFICATION PROGRAMME AREA 1, SANDPIPER PHOSPHATE PROJECT Prepared for: Namibian Marine Phosphate
Ocean Class AGOR Acquisition Update. UNOLS Council June 6, Harvard University
 Ocean Class AGOR Acquisition Update UNOLS Council June 6, 2012 Harvard University Ocean Class AGOR Shipyard: Dakota Creek Industries Anacortes, WA Design Agent Guido Perla & Associates Seattle, WA 1 1
Ocean Class AGOR Acquisition Update UNOLS Council June 6, 2012 Harvard University Ocean Class AGOR Shipyard: Dakota Creek Industries Anacortes, WA Design Agent Guido Perla & Associates Seattle, WA 1 1
VR to DL for UUST. lfremer
 VR to DL for UUST 1 operational tech testbed 1980 EPAULARD 1985 NAUTILE SIRENE - AUV «autonomous landing» 1998 VICTOR 6000 SWIMMER - AUV «autonomous docking» 2001 ALIVE-AUV «autonomous intervention» 2003
VR to DL for UUST 1 operational tech testbed 1980 EPAULARD 1985 NAUTILE SIRENE - AUV «autonomous landing» 1998 VICTOR 6000 SWIMMER - AUV «autonomous docking» 2001 ALIVE-AUV «autonomous intervention» 2003
Robot mobili e tecnologie marine del centro ISME. Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università di Firenze nodo ISME
 Robot mobili e tecnologie marine del centro ISME Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università di Firenze nodo ISME NATIONAL INTER-UNIVERSITY CENTER TO SUPPORT RESEARCH ACTIVITIES
Robot mobili e tecnologie marine del centro ISME Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università di Firenze nodo ISME NATIONAL INTER-UNIVERSITY CENTER TO SUPPORT RESEARCH ACTIVITIES
More Tools in the Toolbox: The Naval Oceanographic Office s Remote Environmental Monitoring UnitS (REMUS) 6000 AUV
 6000 AUV") More Tools in the Toolbox: The Naval Oceanographic Office s Remote Environmental Monitoring UnitS (REMUS) 6000 AUV Kenneth M. Sharp and Randy H. White Naval Oceanographic Office Ocean Projects Department
More Tools in the Toolbox: The Naval Oceanographic Office s Remote Environmental Monitoring UnitS (REMUS) 6000 AUV Kenneth M. Sharp and Randy H. White Naval Oceanographic Office Ocean Projects Department
Capital Markets Day 2007 Kongsberg Maritime 25 September 20O7
 Capital Markets Day 27 Kongsberg Maritime 25 September 2O7 WORLD CLASS through people, technology and dedication 1 Kongsberg Maritime Offshore & Merchant Marine Offshore & Merchant Marine Introduction
Capital Markets Day 27 Kongsberg Maritime 25 September 2O7 WORLD CLASS through people, technology and dedication 1 Kongsberg Maritime Offshore & Merchant Marine Offshore & Merchant Marine Introduction
Ocean Class AGOR Program Program Status 21 October 2014
 Ocean Class AGOR Program Program Status 21 October 2014 Prepared For UNOLS Annual Meeting Mike Prince (CTR) Research Facilities (321RF) Office of Naval Research Chris MacDonald Assistant Program Manager
Ocean Class AGOR Program Program Status 21 October 2014 Prepared For UNOLS Annual Meeting Mike Prince (CTR) Research Facilities (321RF) Office of Naval Research Chris MacDonald Assistant Program Manager
Dave Field - Operations Director IXSURVEY Australia
 Dave Field - Operations Director IXSURVEY Australia Kongsberg FEMME 2015 Auckland Island project overview System selection and why System installation considerations and innovation Utilisation approaches
Dave Field - Operations Director IXSURVEY Australia Kongsberg FEMME 2015 Auckland Island project overview System selection and why System installation considerations and innovation Utilisation approaches
HyDrone and EchoBoat for Autonomous Hydrographic Surveying
 John Tamplin President Seafloor Systems, Inc. JANUARY 15, 2017 HyDrone and EchoBoat for Autonomous Hydrographic Surveying Introduction HyDrone and EchoBoat USV s Partnership Formed to Provide a Solution
John Tamplin President Seafloor Systems, Inc. JANUARY 15, 2017 HyDrone and EchoBoat for Autonomous Hydrographic Surveying Introduction HyDrone and EchoBoat USV s Partnership Formed to Provide a Solution
Autonomous Ships E-NAVIGATION UNDERWAY November 7, William Westmoreland Adrian Paruas
 E-NAVIGATION UNDERWAY 2018 Autonomous Ships November 7, 2018 William Westmoreland Adrian Paruas KONGSBERG PROPRIETARY: This document contains KONGSBERG information which is proprietary and c onfidential.
E-NAVIGATION UNDERWAY 2018 Autonomous Ships November 7, 2018 William Westmoreland Adrian Paruas KONGSBERG PROPRIETARY: This document contains KONGSBERG information which is proprietary and c onfidential.
SHORT COMPANY PRESENTATION FOLLOWED BY R&D BECOMES REALITY
 SHORT COMPANY PRESENTATION FOLLOWED BY R&D BECOMES REALITY WE ARE MMT We collect, process and visualise the conditions of the seabed. We offer assured surveys in bathymetric, geophysical and geotechnical
SHORT COMPANY PRESENTATION FOLLOWED BY R&D BECOMES REALITY WE ARE MMT We collect, process and visualise the conditions of the seabed. We offer assured surveys in bathymetric, geophysical and geotechnical
Marine Robotics. Alfredo Martins. Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016
 Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Multiple autonomous vehicles at sea 2 Multiple coordinated
Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Multiple autonomous vehicles at sea 2 Multiple coordinated
The Development of an Autonomous Shuttle Ferry in Trondheim Associate Professor Egil Eide, Department of Electronics Systems, NTNU
 The Development of an Autonomous Shuttle Ferry in Trondheim Associate Professor Egil Eide, Department of Electronics Systems, NTNU Technologically feasible Scalable and reconfigurable A new tourist attraction
The Development of an Autonomous Shuttle Ferry in Trondheim Associate Professor Egil Eide, Department of Electronics Systems, NTNU Technologically feasible Scalable and reconfigurable A new tourist attraction
Product description. EM 2040 Multibeam Echo Sounder
 Product description EM 2040 Multibeam Echo Sounder Kongsberg EM 2040 Multibeam echo sounder Product Description 344245/D February 2012 Kongsberg Maritime AS Revision status Document number:344245 / Current
Product description EM 2040 Multibeam Echo Sounder Kongsberg EM 2040 Multibeam echo sounder Product Description 344245/D February 2012 Kongsberg Maritime AS Revision status Document number:344245 / Current
Arabian Gulf Threats. 17 M barrels/ day, 35% of the world oil trade. Largest offshore oil development area in the world
 1 Arabian Gulf Threats 1. Ballast water discharged, 2. Dredging and infilling for coastal development, 3. Intentional or accidental oil spills, 4. Tank cleaning leakage from drilling rigs and production
1 Arabian Gulf Threats 1. Ballast water discharged, 2. Dredging and infilling for coastal development, 3. Intentional or accidental oil spills, 4. Tank cleaning leakage from drilling rigs and production
Product Description. EM 710 Multibeam echo sounder
 Product Description EM 710 Multibeam echo sounder Kongsberg EM 710 Multibeam echo sounder Product Description Kongsberg Maritime 855-164940/F March 2012 Kongsberg Maritime AS Revision status Document
Product Description EM 710 Multibeam echo sounder Kongsberg EM 710 Multibeam echo sounder Product Description Kongsberg Maritime 855-164940/F March 2012 Kongsberg Maritime AS Revision status Document
Towed Streamer Positioning System
 Towed Streamer Positioning System Performance Data s towed streamer positioning system reduces the positional uncertainty for the entire towed streamer array by integrating horizontal and vertical streamer
Towed Streamer Positioning System Performance Data s towed streamer positioning system reduces the positional uncertainty for the entire towed streamer array by integrating horizontal and vertical streamer
WORLD CLASS through people, technology and dedication. KONGSBERG September 20,
 WORLD CLASS through people, technology and dedication KONGSBERG September 20, 2006 1 Kongsberg Maritime Offshore & Merchant Marine Focusing on core technologies building strong application knowledge sales
WORLD CLASS through people, technology and dedication KONGSBERG September 20, 2006 1 Kongsberg Maritime Offshore & Merchant Marine Focusing on core technologies building strong application knowledge sales
ISSUE Construction and ROV Professionals Q2 / A Breakthrough in Hybrid Underwater Vehicles. The ECA Mine Counter Measure System
 8. A Breakthrough in Hybrid Underwater Vehicles 25. The ECA Mine Counter Measure System 31. The SeaTrepid Story 34. The Evolution of Single Beam Sonars for ROVs 11 The magazine of choice for Subsea ISSUE
8. A Breakthrough in Hybrid Underwater Vehicles 25. The ECA Mine Counter Measure System 31. The SeaTrepid Story 34. The Evolution of Single Beam Sonars for ROVs 11 The magazine of choice for Subsea ISSUE
Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation
 Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation A cooperative study between the Lower Brule Sioux Tribe s Environmental Protection Office and the U.S. Geological Survey, with assistance
Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation A cooperative study between the Lower Brule Sioux Tribe s Environmental Protection Office and the U.S. Geological Survey, with assistance
The HUGIN Autonomous Underwater Vehicle for Forward Mine Hunting Operations
 UDT Europe 2001,Hamburg, Germany, 26-28 June 2001 The HUGIN Autonomous Underwater Vehicle for Forward Mine Hunting Operations Per Espen Hagen and Nils Størksersen Norwegian Defence Research Establishment
UDT Europe 2001,Hamburg, Germany, 26-28 June 2001 The HUGIN Autonomous Underwater Vehicle for Forward Mine Hunting Operations Per Espen Hagen and Nils Størksersen Norwegian Defence Research Establishment
Product Description EM 300
 Product Description EM 300 Multibeam echo sounder 855-160864 EM 300 Multibeam echo sounder Product description This document presents a brief technical description of the EM 300 multibeam echo sounder.
Product Description EM 300 Multibeam echo sounder 855-160864 EM 300 Multibeam echo sounder Product description This document presents a brief technical description of the EM 300 multibeam echo sounder.
CONCLUSIONS OVERVIEW. Investment Considerations. Chapter Five
 Chapter Five CONCLUSIONS OVERVIEW The NR-1 was built quickly in 1969 with state-of-the-art technology as an ocean engineering and ocean research support submarine. During its lifetime, capabilities increases
Chapter Five CONCLUSIONS OVERVIEW The NR-1 was built quickly in 1969 with state-of-the-art technology as an ocean engineering and ocean research support submarine. During its lifetime, capabilities increases
Installation manual. Pole-mount Deployment System
 Installation manual Pole-mount Deployment System 974-80207001/2.0 Pole-mount Deployment System Installation Manual Document revisions Version Date Written by Checked by Approved by 1.0 Aug 25, 2011 BC
Installation manual Pole-mount Deployment System 974-80207001/2.0 Pole-mount Deployment System Installation Manual Document revisions Version Date Written by Checked by Approved by 1.0 Aug 25, 2011 BC
RVOC Discovery Replacement Project Robin A Williams OBE Project Technical Adviser to the Natural Environment Research Council.
 60 s Discovery Replacement Project Robin A Williams OBE Project Technical Adviser to the Natural Environment Research Council 1992 2013/4 RVOC 2010 70 s & 80 s 2013 onward RRS Discovery Replacement Shipbuilder:
60 s Discovery Replacement Project Robin A Williams OBE Project Technical Adviser to the Natural Environment Research Council 1992 2013/4 RVOC 2010 70 s & 80 s 2013 onward RRS Discovery Replacement Shipbuilder:
Integrated Solutions for LNG operations. Kongsberg Maritime
 Integrated Solutions for LNG operations Kongsberg Maritime International high-tech solutions, from deep sea to outer space Advanced solutions and applications for the maritime, oil & gas, defence and space
Integrated Solutions for LNG operations Kongsberg Maritime International high-tech solutions, from deep sea to outer space Advanced solutions and applications for the maritime, oil & gas, defence and space
KONGSBERG Maritime AGENDA 07/11/2012. Geir Håøy - President Kongsberg Maritime. Introduction to Kongsberg Maritime. Our markets.
 KONGSBERG Maritime Geir Håøy - President Kongsberg Maritime AGENDA Introduction to Kongsberg Maritime Our markets Our positions Initiatives going forward Conclusion Page 2 1 Distribution of operating revenues:
KONGSBERG Maritime Geir Håøy - President Kongsberg Maritime AGENDA Introduction to Kongsberg Maritime Our markets Our positions Initiatives going forward Conclusion Page 2 1 Distribution of operating revenues:
RESEARCH NEWS. Mass-produced underwater vehicles. Deep-sea space shuttle
 February 2016 Page 1 5 Deep-sea space shuttle Mass-produced underwater vehicles Autonomous underwater vehicles are essential for tasks such as exploring the seabed in search of oil or minerals. Fraunhofer
February 2016 Page 1 5 Deep-sea space shuttle Mass-produced underwater vehicles Autonomous underwater vehicles are essential for tasks such as exploring the seabed in search of oil or minerals. Fraunhofer
R&D Activities for Underwater Vehicles and Acoustic Communication
 POGO 12 KORDI Perspective R&D Activities for Underwater Vehicles and Acoustic Communication 25 January, 211 Pan-Mook Lee Presentation Outline Vehicles 1. ROV & Depressor [Hemire/Henuvy, 27] 2. AUV [ISIMI1,
POGO 12 KORDI Perspective R&D Activities for Underwater Vehicles and Acoustic Communication 25 January, 211 Pan-Mook Lee Presentation Outline Vehicles 1. ROV & Depressor [Hemire/Henuvy, 27] 2. AUV [ISIMI1,
UNITED ARAB EMIRATES NATIONAL REPORT ROPME SEA AREA HYDROGRAPHIC COMMISSION (RSAHC) 2014
 2014") UNITED ARAB EMIRATES NATIONAL REPORT ROPME SEA AREA HYDROGRAPHIC COMMISSION (RSAHC) 2014 United Arab Emirates Armed Forces Military Survey Department P.O. Box 3947, Abu Dhabi Table of Contents I. INTRODUCTION...
UNITED ARAB EMIRATES NATIONAL REPORT ROPME SEA AREA HYDROGRAPHIC COMMISSION (RSAHC) 2014 United Arab Emirates Armed Forces Military Survey Department P.O. Box 3947, Abu Dhabi Table of Contents I. INTRODUCTION...
Hydrography Integrated Systems and Platforms
 Kongsberg Maritime Subsea Hydrography Integrated Systems and Platforms 15 th MACHC Meeting, Manzanillo, Mexico, 11 th to 13 th December 2014. Jan Haug Kristensen Regional Manager Americas Subsea Sales
Kongsberg Maritime Subsea Hydrography Integrated Systems and Platforms 15 th MACHC Meeting, Manzanillo, Mexico, 11 th to 13 th December 2014. Jan Haug Kristensen Regional Manager Americas Subsea Sales
Research vessel Mar Portugal
 Research vessel Mar Portugal Mafalda Carapuço IPMA Coordinator of the Research Vessels Group 20 th ERVO Annual Meeting Project drivers Increase IPMA presence in the Ocean Assess living resources and non-living
Research vessel Mar Portugal Mafalda Carapuço IPMA Coordinator of the Research Vessels Group 20 th ERVO Annual Meeting Project drivers Increase IPMA presence in the Ocean Assess living resources and non-living
The Riptide µuuv. Dr. Dani Goldberg MOOS-DAWG, Aug 2017
 The Riptide µuuv Dr. Dani Goldberg MOOS-DAWG, Aug 2017 Who We Are Started in January 2015 Principals Jeffrey Smith CEO 20+ years Defense, 10+ years in UUVs John Vestri COO/CFO 8 years in ROVs Dr. Dani
The Riptide µuuv Dr. Dani Goldberg MOOS-DAWG, Aug 2017 Who We Are Started in January 2015 Principals Jeffrey Smith CEO 20+ years Defense, 10+ years in UUVs John Vestri COO/CFO 8 years in ROVs Dr. Dani
Small UAV A French MoD perspective and planning
 Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
KEY FEATURES. DP-3 250T Offshore Crane 1600m 2 Deck Space Moonpool High sea state capability ARIADNE
 KEY FEATURES DP-3 250T Offshore Crane 1600m 2 Deck Space Moonpool High sea state capability ARIADNE VESSEL SPECIFICATIONS The Ariadne is a DP-3 Construction Support Vessel built for worldwide subsea operations,
KEY FEATURES DP-3 250T Offshore Crane 1600m 2 Deck Space Moonpool High sea state capability ARIADNE VESSEL SPECIFICATIONS The Ariadne is a DP-3 Construction Support Vessel built for worldwide subsea operations,
Fred. Olsen POWER GENERATION AT SEA. Autonomous Sea Power «POWER AND GATEWAY SUBSEA» Fred.Olsen Ltd.
 Author: Even Hjetland even.hjetland@fredolsen.no Date: Sept. 5th 2017 Revision: Type: O For email/download «POWER AND GATEWAY SUBSEA» Fred. Olsen Autonomous Sea Power POWER GENERATION AT SEA POWER SUPPLY
Author: Even Hjetland even.hjetland@fredolsen.no Date: Sept. 5th 2017 Revision: Type: O For email/download «POWER AND GATEWAY SUBSEA» Fred. Olsen Autonomous Sea Power POWER GENERATION AT SEA POWER SUPPLY
EchoBoat-G2- RCV / ASV
 EchoBoat-G2- RCV / ASV A quick start guide/user manual. Page 1 EchoBoat-G2-RCV / ASV A quick start guide/user manual. Table of Contents Page 1.0 Introduction... 3 2.0 EchoBoat Safety and Cautions... 3
EchoBoat-G2- RCV / ASV A quick start guide/user manual. Page 1 EchoBoat-G2-RCV / ASV A quick start guide/user manual. Table of Contents Page 1.0 Introduction... 3 2.0 EchoBoat Safety and Cautions... 3
Analysts/Fund Managers Visit 19 April Autonomous Systems and Future Capability Mark Kane
 Analysts/Fund Managers Visit 19 April 2007 Autonomous Systems and Future Capability Mark Kane The Rationale for UAVs The Rationale for UAVs UAVs generally seen to carry out the dull, dirty, and dangerous
Analysts/Fund Managers Visit 19 April 2007 Autonomous Systems and Future Capability Mark Kane The Rationale for UAVs The Rationale for UAVs UAVs generally seen to carry out the dull, dirty, and dangerous
25.65m Ex-DANISH COASTAL DEFENCE PATROL BOAT SPIRIT OF ROMO
 ! 25.65m Ex-DANISH COASTAL DEFENCE PATROL BOAT SPIRIT OF ROMO Sistership Sales Price: 175000 BUILDER: YEAR: REFIT YEAR: MODEL: FLAG: LYING: LENGTH: BEAM: DRAFT: SPEED RANGE: CREW: CONSTRUCTION Svendborg
! 25.65m Ex-DANISH COASTAL DEFENCE PATROL BOAT SPIRIT OF ROMO Sistership Sales Price: 175000 BUILDER: YEAR: REFIT YEAR: MODEL: FLAG: LYING: LENGTH: BEAM: DRAFT: SPEED RANGE: CREW: CONSTRUCTION Svendborg
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination
: An Autonomous Vessel for Data Acquisition and Dissemination") Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
Oil on Water Exercise 2017 Sarah Hall, Development & Assurance Advisor for Surveillance, Modelling and Visualisation (SMV)
") Oil on Water Exercise 2017 Sarah Hall, Development & Assurance Advisor for Surveillance, Modelling and Visualisation (SMV) Copyright 2017. Oil Spill Response Limited. Content Why an oil on water exercise?
Oil on Water Exercise 2017 Sarah Hall, Development & Assurance Advisor for Surveillance, Modelling and Visualisation (SMV) Copyright 2017. Oil Spill Response Limited. Content Why an oil on water exercise?
Design and Testing of the Spartan USV Mine Warfare Module
 Design and Testing of the Spartan USV Mine Warfare Module 14 June, 2005 Dr. Robert Mons Sr. Advisory Engineer Northrop Grumman Corporation Acknowledgement This work was sponsored by The Naval Undersea
Design and Testing of the Spartan USV Mine Warfare Module 14 June, 2005 Dr. Robert Mons Sr. Advisory Engineer Northrop Grumman Corporation Acknowledgement This work was sponsored by The Naval Undersea
MilliAmpère Norges første førerløse ferje
 Sjøsikkerhetskonferansen 2018 Nå MilliAmpère Norges første førerløse ferje Egil Eide Førsteamanuensis, NTNU The Development of an Autonomous Shuttle Ferry in Trondheim Associate Professor Egil Eide, Department
Sjøsikkerhetskonferansen 2018 Nå MilliAmpère Norges første førerløse ferje Egil Eide Førsteamanuensis, NTNU The Development of an Autonomous Shuttle Ferry in Trondheim Associate Professor Egil Eide, Department
In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led
 was founded by current company President Alexander Zakharov, since then he has led") A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
Marine robots in environmental surveys:
 Le Quartz Center, Brest, France Marine robots in environmental surveys: current developments at andrea.caiti@unipi.it Università di Pisa Dipartimento di Ingegneria dell informazione & Centro E. Piaggio
Le Quartz Center, Brest, France Marine robots in environmental surveys: current developments at andrea.caiti@unipi.it Università di Pisa Dipartimento di Ingegneria dell informazione & Centro E. Piaggio
Product Description EM 1002
 Product Description EM 1002 Multibeam echo sounder 855-160866 EM 1002 Multibeam echo sounder Product description This document presents a brief technical description of the EM 1002 multibeam echo sounder.
Product Description EM 1002 Multibeam echo sounder 855-160866 EM 1002 Multibeam echo sounder Product description This document presents a brief technical description of the EM 1002 multibeam echo sounder.
Design and Simulation of New Versions of Tube Launched UAV
 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
Kongsberg Digital Maritime Simulation
 Kongsberg Digital Maritime Simulation MUF Konferansen November, 21-23, 2017 Bjarne Torkelsen Maritime Simulation Next Level KONGSBERG BUSINESS AREAS KONGSBERG MARITIME KONGSBERG DEFENCE & AEROSPACE KONGSBERG
Kongsberg Digital Maritime Simulation MUF Konferansen November, 21-23, 2017 Bjarne Torkelsen Maritime Simulation Next Level KONGSBERG BUSINESS AREAS KONGSBERG MARITIME KONGSBERG DEFENCE & AEROSPACE KONGSBERG
Grain LNG: A Collaborative Approach To LNG Terminal Business Performance Improvement
 Grain LNG: A Collaborative Approach To LNG Terminal Business Performance Improvement Nick Blair, Grain LNG, Commercial Operations Marco Fahl, Honeywell, Senior Consultant 2012 Business Optimization Conference
Grain LNG: A Collaborative Approach To LNG Terminal Business Performance Improvement Nick Blair, Grain LNG, Commercial Operations Marco Fahl, Honeywell, Senior Consultant 2012 Business Optimization Conference
KEEL MARINE LTD Naval Architects, Marine Engineers and Surveyors
 KEEL MARINE LTD Naval Architects, Marine Engineers and Surveyors Ridgeway Office Park, Unit 6 8 Bedford Road, Petersfield, GU32 3QF UNITED KINGDOM 18 m Wind Farm Support Vessel Outline Specification GENERAL
KEEL MARINE LTD Naval Architects, Marine Engineers and Surveyors Ridgeway Office Park, Unit 6 8 Bedford Road, Petersfield, GU32 3QF UNITED KINGDOM 18 m Wind Farm Support Vessel Outline Specification GENERAL
NEW JAPANESE SURVEY VESSEL TAKUYO
 International Hydrographie Review, Monaco, LXI1 (2), July 1985 NEW JAPANESE SURVEY VESSEL TAKUYO by Akira NAKANISHI'*' ABSTRACT The Hydrographic Department, Maritime Safety Agency, Japan, has commissioned
International Hydrographie Review, Monaco, LXI1 (2), July 1985 NEW JAPANESE SURVEY VESSEL TAKUYO by Akira NAKANISHI'*' ABSTRACT The Hydrographic Department, Maritime Safety Agency, Japan, has commissioned
Product Description SBP 120
 Product Description SBP 120 Sub-Bottom Profiler Kongsberg SBP 120 Sub-bottom profiler Product Description Kongsberg Maritime 164599/C April 2010 Document history Document number: 164599 Rev. A January
Product Description SBP 120 Sub-Bottom Profiler Kongsberg SBP 120 Sub-bottom profiler Product Description Kongsberg Maritime 164599/C April 2010 Document history Document number: 164599 Rev. A January
Alstom Supplier Requirements for Scottish Supply Chain Opportunities FOR
 Alstom Supplier Requirements for OCEDG4-1ALLSUP0002EC ALSTOM SUPPLIER REQUIREMENTS FOR SCOTTISH SUPPLY CHAIN OPPORTUNITIES 3 2 1 authority, is strictly prohibited. Page 1 / 7 Alstom Supplier Requirements
Alstom Supplier Requirements for OCEDG4-1ALLSUP0002EC ALSTOM SUPPLIER REQUIREMENTS FOR SCOTTISH SUPPLY CHAIN OPPORTUNITIES 3 2 1 authority, is strictly prohibited. Page 1 / 7 Alstom Supplier Requirements
Copyright 2016 by Innoviz All rights reserved. Innoviz
 Innoviz 0 Cutting Edge 3D Sensing to Enable Fully Autonomous Vehicles May 2017 Innoviz 1 Autonomous Vehicles Industry Overview Innoviz 2 Autonomous Vehicles From Vision to Reality Uber Google Ford GM 3
Innoviz 0 Cutting Edge 3D Sensing to Enable Fully Autonomous Vehicles May 2017 Innoviz 1 Autonomous Vehicles Industry Overview Innoviz 2 Autonomous Vehicles From Vision to Reality Uber Google Ford GM 3
SUBSEA newsletter. The Woods Hole Oceanographic Institution (WHOI), an implementing organization of the OOI, and the Consortium
, an implementing organization of the OOI, and the Consortium") NEWSLETTER For customers of kongsberg MARITIME 03/11 The SUBSEA newsletter Publisher: Kongsberg Maritime Editor: Subsea Division Tel.: +47 33034100 Fax: +47 33044753 e-mail: subsea@kongsberg.com www.km.kongsberg.com
NEWSLETTER For customers of kongsberg MARITIME 03/11 The SUBSEA newsletter Publisher: Kongsberg Maritime Editor: Subsea Division Tel.: +47 33034100 Fax: +47 33044753 e-mail: subsea@kongsberg.com www.km.kongsberg.com
UAV Enabled Measurement for Spatial Magnetic Field of Smart Rocks in Bridge Scour Monitoring
 INSPECTING AND PRESERVING INFRASTRUCTURE THROUGH ROBOTIC EXPLORATION UAV Enabled Measurement for Spatial Magnetic Field of Smart Rocks in Bridge Scour Monitoring Genda Chen, PhD. P.E., Professor and INSPIRE
INSPECTING AND PRESERVING INFRASTRUCTURE THROUGH ROBOTIC EXPLORATION UAV Enabled Measurement for Spatial Magnetic Field of Smart Rocks in Bridge Scour Monitoring Genda Chen, PhD. P.E., Professor and INSPIRE
Dr. Fridtjof Nansen Building progress
 Dr. Fridtjof Nansen Building progress Update by 30th July 2016 Main milestones: First steel cut: 13.01.2015 Keel laying: 23.04.15 Launch of vessel: 23.12.15 Scheduled trial start up ref MP5: Dockside trials
Dr. Fridtjof Nansen Building progress Update by 30th July 2016 Main milestones: First steel cut: 13.01.2015 Keel laying: 23.04.15 Launch of vessel: 23.12.15 Scheduled trial start up ref MP5: Dockside trials
UNITED ARAB EMIRATES NATIONAL REPORT ROPME SEA AREA HYDROGRAPHIC COMMISSION (RSAHC) 2015
 2015") UNITED ARAB EMIRATES NATIONAL REPORT ROPME SEA AREA HYDROGRAPHIC COMMISSION (RSAHC) 2015 United Arab Emirates Armed Forces Military Survey Department P.O. Box 3947, Abu Dhabi Table of Contents I. INTRODUCTION...
UNITED ARAB EMIRATES NATIONAL REPORT ROPME SEA AREA HYDROGRAPHIC COMMISSION (RSAHC) 2015 United Arab Emirates Armed Forces Military Survey Department P.O. Box 3947, Abu Dhabi Table of Contents I. INTRODUCTION...
DG-60M/540T BARBAROS Class PATROL BOAT ASuW, ASW, AAW
 (1 / 7) DESIGN : By DUZGIT GEMİ İNSA SAN. A.Ş. PLATFORM : Length OA = 60,00 mts Length BP = 55,50 mts Breadth mld = 8,90 mts Depth to main deck = 5,50 mts Design draft (mld) = 2,43 mts Design draft (extreme)
(1 / 7) DESIGN : By DUZGIT GEMİ İNSA SAN. A.Ş. PLATFORM : Length OA = 60,00 mts Length BP = 55,50 mts Breadth mld = 8,90 mts Depth to main deck = 5,50 mts Design draft (mld) = 2,43 mts Design draft (extreme)
Safety for Autonomous Ships
 Safety for Autonomous Ships What can we learn from other modes of transportation? Ocean Week, Trondheim, May 9, 2018 Stig Petersen, SINTEF Digital stig.petersen@sintef.no Funding H2020 ECSEL SafeCOP project
Safety for Autonomous Ships What can we learn from other modes of transportation? Ocean Week, Trondheim, May 9, 2018 Stig Petersen, SINTEF Digital stig.petersen@sintef.no Funding H2020 ECSEL SafeCOP project
LUNAR INDUSTRIAL RESEARCH BASE. Yuzhnoye SDO proprietary
 LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
SPECIAL MISSION AIRCRAFT
 SPECIAL MISSION AIRCRAFT precision from above FACTS AND SPECIFICATIONS DA42 MPP Guardian - Facts and Specifications Power plant Engine Propeller Fuel grades 2x AUSTRO ENGINE AE300 (168 hp, turbo charged)
SPECIAL MISSION AIRCRAFT precision from above FACTS AND SPECIFICATIONS DA42 MPP Guardian - Facts and Specifications Power plant Engine Propeller Fuel grades 2x AUSTRO ENGINE AE300 (168 hp, turbo charged)
Over-Snow Rovers for Polar Science Campaigns
 Over-Snow Rovers for Polar Science Campaigns J.H. Lever 1, L.E. Ray 2, A.M. Morlock 2, A.M. Burzynski 1, R.M. Williams 2 1 Cold Regions Research and Engineering Laboratory, Hanover, NH 2 Thayer School
Over-Snow Rovers for Polar Science Campaigns J.H. Lever 1, L.E. Ray 2, A.M. Morlock 2, A.M. Burzynski 1, R.M. Williams 2 1 Cold Regions Research and Engineering Laboratory, Hanover, NH 2 Thayer School
Project Spartan. An Innovative Light Frigate Design for General Purpose Frigate (GPFF)
") Project Spartan An Innovative Light Frigate Design for General Purpose Frigate (GPFF) The 2015 Strategic Defence and Security Review (SDSR) announced that the Royal Navy is looking to procure five light
Project Spartan An Innovative Light Frigate Design for General Purpose Frigate (GPFF) The 2015 Strategic Defence and Security Review (SDSR) announced that the Royal Navy is looking to procure five light
Ayeyarwady Integrated River basin Management Project (AIRBM)
") Public Disclosure Authorized Public Disclosure Authorized I. GENERAL Ayeyarwady Integrated River basin Management Project (AIRBM) Procurement Plan 1. Project information a. Country/Borrower: Myanmar b.
Public Disclosure Authorized Public Disclosure Authorized I. GENERAL Ayeyarwady Integrated River basin Management Project (AIRBM) Procurement Plan 1. Project information a. Country/Borrower: Myanmar b.
Eye In The Sky: The Future of Risk Assessment From Above
 Eye In The Sky: The Future of Risk Assessment From Above Property Insurance Report National Conference 15 November 2010 Timothy E. Carone, Ph.D. Director, Global Climate Monitoring Systems Advanced Programs
Eye In The Sky: The Future of Risk Assessment From Above Property Insurance Report National Conference 15 November 2010 Timothy E. Carone, Ph.D. Director, Global Climate Monitoring Systems Advanced Programs
The changing technological face of the Maritime Sector
 The changing technological face of the Maritime Sector 1 Automation in shipping: A journey 50 years old 1961: the first successful automated seagoing ship Bridge control of the main propulsion Centralized
The changing technological face of the Maritime Sector 1 Automation in shipping: A journey 50 years old 1961: the first successful automated seagoing ship Bridge control of the main propulsion Centralized
CLV SIA. Vessel Specification. M-Tech Offshore Torskekaj Esbjerg, Denmark
 Vessel Specification DP-2 CABLE LAYING VESSEL CONFIGURED FOR SUBSEA POWER CABLE INSTALLATIONS AND INTER-ARRAY LINKS The CLV SIA is acquired by M-Tech Offshore A/S, a Danish Company equally owned by NT
Vessel Specification DP-2 CABLE LAYING VESSEL CONFIGURED FOR SUBSEA POWER CABLE INSTALLATIONS AND INTER-ARRAY LINKS The CLV SIA is acquired by M-Tech Offshore A/S, a Danish Company equally owned by NT
Efficient and flexible solution
 Efficient and flexible solution for the most demanding clients Bourbon PX 105 MACS Series of Large Platform Supply Vessels Bourbon Front - Bourbon Clear - Bourbon Calm - Bourbon Rainbow Bourbon PX 105
Efficient and flexible solution for the most demanding clients Bourbon PX 105 MACS Series of Large Platform Supply Vessels Bourbon Front - Bourbon Clear - Bourbon Calm - Bourbon Rainbow Bourbon PX 105
The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production
 AUVSI Unmanned Systems North America 2013 Conference August 14, 2013 The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com
AUVSI Unmanned Systems North America 2013 Conference August 14, 2013 The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com
Marathon 900 RIB-D. Norsafe Project No.: TBA Norsafe Doc. No.: TSB-0508 Rev. Date: Rev. No: 1
 Marathon 900 RIB-D Norsafe Project No.: TBA Norsafe Doc. No.: TSB-0508 Rev. Date: 20.03.2018 Rev. No: 1 Norsafe AS P.O. Box 115 N-4852 Faervik, Norway Tel: +47 37 05 85 00 Fax: +47 37 05 85 01 E-mail:
Marathon 900 RIB-D Norsafe Project No.: TBA Norsafe Doc. No.: TSB-0508 Rev. Date: 20.03.2018 Rev. No: 1 Norsafe AS P.O. Box 115 N-4852 Faervik, Norway Tel: +47 37 05 85 00 Fax: +47 37 05 85 01 E-mail:
Development of Fuel Cell System for Long Cruising Lange Autonomous Underwater Vehicle
 Development of Fuel Cell System for Long Cruising Lange Autonomous Underwater Vehicle 3.4 Tadahiro Hyakudome, Takeshi Nakatani, Hiroshi Yoshida, Marine Technology and Engineering Center, JAMSTEC Toshihiro
Development of Fuel Cell System for Long Cruising Lange Autonomous Underwater Vehicle 3.4 Tadahiro Hyakudome, Takeshi Nakatani, Hiroshi Yoshida, Marine Technology and Engineering Center, JAMSTEC Toshihiro
LBL CALIBRATION. Kongsberg Simrad AS - Training Department LBL Calibration - page 1
 LBL CALIBRATION Kongsberg Simrad AS - Training Department LBL Calibration - page 1 INTRODUCTION The purpose of this section is to give you some of the theoretical background information needed for LBL
LBL CALIBRATION Kongsberg Simrad AS - Training Department LBL Calibration - page 1 INTRODUCTION The purpose of this section is to give you some of the theoretical background information needed for LBL
MK VI Patrol Boat (MK VI PB) and Multi Mission Reconfigurable Capabilities
 and Multi Mission Reconfigurable Capabilities") MK VI Patrol Boat (MK VI PB) and Multi Mission Reconfigurable Capabilities NAVSEA Acquisition Process Overview 15 August 2012 Jean-Michel Coughlin PAPM, Boats Program Office Sea Air Space 2015 13 April
MK VI Patrol Boat (MK VI PB) and Multi Mission Reconfigurable Capabilities NAVSEA Acquisition Process Overview 15 August 2012 Jean-Michel Coughlin PAPM, Boats Program Office Sea Air Space 2015 13 April
Integrated Airborne Surveillance Systems. November 2014
 Integrated Airborne Surveillance Systems November 2014 Integrated Airborne Surveillance Systems ATOS Mission System for Manned Platforms Unmanned Aerial Systems (UAS) 2 ATOS Mission System ATOS (Airborne
Integrated Airborne Surveillance Systems November 2014 Integrated Airborne Surveillance Systems ATOS Mission System for Manned Platforms Unmanned Aerial Systems (UAS) 2 ATOS Mission System ATOS (Airborne
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Alvin Upgrade Project
 Alvin Upgrade Project Kurt Uetz Susan Humphris Project Manager Principal Investigator 101 Staged Approach Upgrade Alvin using the 6,500m rated personnel sphere while: Satisfying as many original HOV design
Alvin Upgrade Project Kurt Uetz Susan Humphris Project Manager Principal Investigator 101 Staged Approach Upgrade Alvin using the 6,500m rated personnel sphere while: Satisfying as many original HOV design
Cybercars : Past, Present and Future of the Technology
 Cybercars : Past, Present and Future of the Technology Michel Parent*, Arnaud de La Fortelle INRIA Project IMARA Domaine de Voluceau, Rocquencourt BP 105, 78153 Le Chesnay Cedex, France Michel.parent@inria.fr
Cybercars : Past, Present and Future of the Technology Michel Parent*, Arnaud de La Fortelle INRIA Project IMARA Domaine de Voluceau, Rocquencourt BP 105, 78153 Le Chesnay Cedex, France Michel.parent@inria.fr
Marathon-900 RIB. Norsafe Project No.: TBA Norsafe Doc. No.: TSB-0269 Rev. Date: Rev. No: 2
 Marathon-900 RIB Norsafe Project No.: TBA Norsafe Doc. No.: TSB-0269 Rev. Date: 20.03.2018 Rev. No: 2 Norsafe AS P.O. Box 115 N-4852 Faervik, Norway Tel: +47 37 05 85 00 Fax: +47 37 05 85 01 E-mail: mail@norsafe.com
Marathon-900 RIB Norsafe Project No.: TBA Norsafe Doc. No.: TSB-0269 Rev. Date: 20.03.2018 Rev. No: 2 Norsafe AS P.O. Box 115 N-4852 Faervik, Norway Tel: +47 37 05 85 00 Fax: +47 37 05 85 01 E-mail: mail@norsafe.com