Robot mobili e tecnologie marine del centro ISME. Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università di Firenze nodo ISME
|
|
|
- Griffin Ward
- 5 years ago
- Views:
Transcription


1 Robot mobili e tecnologie marine del centro ISME Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università di Firenze nodo ISME












2 NATIONAL INTER-UNIVERSITY CENTER TO SUPPORT RESEARCH ACTIVITIES IN THE FIELDS OF MARINE TECHNOLOGIES AND OCEANIC ENGINEERING Established in 1999 About 60 researchers Shared infrastructures, labs, equipments
 Electric motor power (single motor) 2000 W Motor static thrust (single motor) 512 N Available power for payloads 25 A @ 24 V Wireless 5 GHz Ubiquiti Autonomous platform Way-points")
3 ULISSE Catamaran ASV 3m x 1.8m; 2 electrical motors Mass 400 kg Batteries inside each hulls (more than 8h autonomy) 200 kg of payload can be installed Speed (5 m/s w/o payload, 2.5 m/s w/ payload) Electric motor power (single motor) 2000 W Motor static thrust (single motor) 512 N Available power for payloads V Wireless 5 GHz Ubiquiti Autonomous platform Way-points and parameterized path following Reference: Enrico Simetti Università di Genova ISME Partners

 Obstacle")

4 ULISSE Catamaran ASV Deck for lowering underwater sensors through a movable mast Deck for UAV landing Waypoint navigation Hold position against current Path following Research trends involving ULISSE Autonomous geotechnical surveys (EU H2020 WiMUST project) Obstacle detection and avoidance Cooperative behaviours between multiple vehicles Efficient thruster allocation Reference: Enrico Simetti Università di Genova ISME Partners

")

 ISME")
5 Folaga AUV The Folaga AUV is a low-cost platform with surface navigation capability: Diameter 155 mm Length from 2,000 mm Weight in air 31 kg Energy storage: NiMh batteries 12V 45Ah Speed: 2kn (up to 4kn if required) Control: pitch/yaw thruster, movable ballast, active buoyancy control Endurance: six hours at max speed Maneuverability: any bearing and trim with no active surfaces Max depth: 80 m (underwater navigation) ISME Partners




6 WAVE project Wave powered Autonomous Vehicle for marine Exploration Long Endurance AUV Energy harvesting from wave motion with releasable wings Charging/Wings system as a module of efolaga vehicle Re-charge of low power payload battery Possible integration with solar panels Possible exploitation for wave-generated motion at the sea surface ISME Partner PNRM Project industrial partner:


7 AUV Development and testing Vehicle design GNC development HMI for multi-vehicle management ROS-based software architecture Optical and acoustic acquisitions Underwater 2D mosaicing and 3D reconstructions Low-cost technologies to be used in different fields, e.g. archaeology or geology Contacts in Florence (University of Florence ISME node): Benedetto Allotta and Alessandro Ridolfi ISME Partners
 Maximum speed: 5 knots Sizes:")
 Linux + ROS Magnetic compass + MEMS IMU FOG")

8 Typhoon-class AUV Weight: about 180 kg Hull material: fiberglass Maximum pressure: 30 bar (300m depth) Maximum speed: 5 knots Sizes: 3700 X 330Ø mm ISME Partners Onboard devices Power supply: 48V DC X 4kWh (8h of autonomy) Linux + ROS Magnetic compass + MEMS IMU FOG (Fiber Optic Gyroscope) DVL (Doppler Velocity Log) Depth sensor + Altimeter Echo-sounder GPS Wi-Fi + Radio modem Acoustic modem Cameras + Side Scan Sonar

 DVL")

9 MARTA AUV Weight: about 80 kg Hull material: Anticorodal Al Maximum depth: 150 m Maximum speed: 4 knots Sizes: 3700 X 177Ø mm Modularity Onboard devices Power supply: 24V DC X 1300 Wh (8h of autonomy) Linux + ROS Magnetic compass + MEMS IMU FOG (Fiber Optic Gyroscope) DVL (Doppler Velocity Log) Depth sensor + Altimeter Echo-sounder GPS Wi-Fi + Radio modem 2 acoustic modems Cameras + 2D Forward Looking Sonar ISME Partners













10 MARTA AUV From optical images Basler Ace camera Cala Minnola, Sicily, Italy


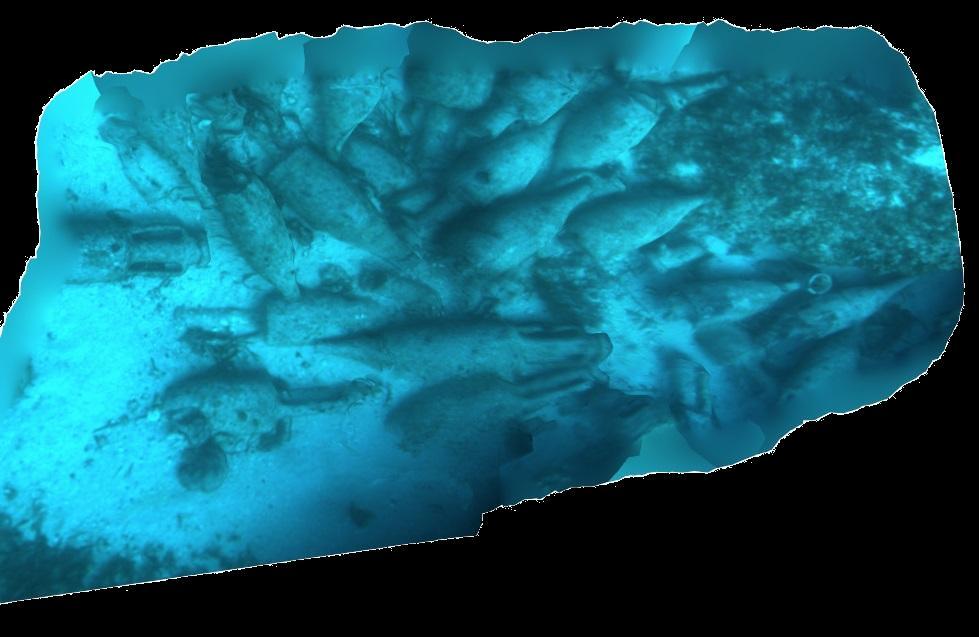

11 MARTA AUV 2D mosaic to 2D and 3D reconstructions 3D reconstruction ISME Partners



12 Zeno AUV Weight: about 35 kg Hull material: Anticorodal Al + carbon fiber Maximum depth: 120 m Maximum speed: 4 knots Sizes: 1000X800X500 mm Hovering 8 motors Quick battery replacement Onboard devices Power supply: 14,8V DC X 600 Wh Linux + ROS Magnetic compass + MEMS IMU FOG (Fiber Optic Gyroscope) DVL (Doppler Velocity Log) Depth sensor + Altimeter Echo-sounder GPS Wi-Fi + Radio modem Acoustic modem Cameras + Side Scan Sonar ISME Partners

 DVL")

13 FeelHippo AUV Weight: 35 kg Hull material: Anticorodal Al + plexiglas Maximum depth: 30 m Maximum speed: 2 knots Autonomy: about 3 h Sizes: 600X640X500 mm 4 motors (V shape) Onboard devices Power supply: 24V DC Linux + ROS Magnetic compass + MEMS IMU FOG (Fiber Optic Gyroscope) DVL (Doppler Velocity Log) Depth sensor + Altimeter Echo-sounder GPS Wi-Fi + Radio modem Acoustic modem Cameras + 2D Forward Looking Sonar ISME Partners




14 FeelHippo AUV






15 Other ISME technologies ROVs Static nodes and acoustic modems Underwater grippers Tablets and technologies for divers
16 Contacts Director Giuseppe Casalino - DIBRIS - University of Genova - casalino@dist.unige.it Associated Universities and Departments with points of contact Polytechnical University of Marche Giuseppe Conte - conte@univpm.it University of Cassino and Southern Lazio Gianluca Antonelli - antonelli@unicas.it University of Genova Giuseppe Casalino - casalino@dist.unige.it Andrea Trucco - trucco@ieee.org University of Salento Giovanni Indiveri - giovanni.indiveri@unisalento.it University of Pisa Andrea Caiti - andrea.caiti@unipi.it University of Florence Benedetto Allotta - benedetto.allotta@unifi.it University of Calabria Alessandro Casavola - a.casavola@dimes.unical.it University of Roma La Sapienza Chiara Petrioli - petrioli@di.uniroma1.it University of Bologna Claudio Melchiorri- claudio.melchiorri@unibo.it

17 Thank you!
18 Contacts: Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università di Firenze nodo ISME Via di Santa Marta 3, Firenze, Italia
Marine robots in environmental surveys:
 Le Quartz Center, Brest, France Marine robots in environmental surveys: current developments at andrea.caiti@unipi.it Università di Pisa Dipartimento di Ingegneria dell informazione & Centro E. Piaggio
Le Quartz Center, Brest, France Marine robots in environmental surveys: current developments at andrea.caiti@unipi.it Università di Pisa Dipartimento di Ingegneria dell informazione & Centro E. Piaggio
Design of SPARUS II AUV
 Design of SPARUS II AUV Underwater Robotics Research Centre (CIRS) Computer Vision and Robotics Institute Universitat de Girona, 17003, Girona, Spain. web: http://cirs.udg.edu Contact person: Marc Carreras
Design of SPARUS II AUV Underwater Robotics Research Centre (CIRS) Computer Vision and Robotics Institute Universitat de Girona, 17003, Girona, Spain. web: http://cirs.udg.edu Contact person: Marc Carreras
UNDERWATER SOLUTIONS WORLDWIDE
 UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination
: An Autonomous Vessel for Data Acquisition and Dissemination") Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
Marine Robotics. Alfredo Martins. Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016
 Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Multiple autonomous vehicles at sea 2 Multiple coordinated
Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Multiple autonomous vehicles at sea 2 Multiple coordinated
Offshore renewable energy generation and storage: large size sea energy harvesting
 Offshore renewable energy generation and storage: large size sea energy harvesting Prof. Alberto Traverso alberto.traverso@unige.it University of Genoa, Italy Dipartimento di Ingegneria Meccanica - DIME
Offshore renewable energy generation and storage: large size sea energy harvesting Prof. Alberto Traverso alberto.traverso@unige.it University of Genoa, Italy Dipartimento di Ingegneria Meccanica - DIME
1 of 5 4/19/11 2:15 PM
 Top Page > About JAMSTEC > Research Vessels, Facilities and Equipment > Research Vessels and Vehicles > URASHIMA Research, Development and Promotion Research Vessels, Facilities and Equipment Research
Top Page > About JAMSTEC > Research Vessels, Facilities and Equipment > Research Vessels and Vehicles > URASHIMA Research, Development and Promotion Research Vessels, Facilities and Equipment Research
R&D Activities for Underwater Vehicles and Acoustic Communication
 POGO 12 KORDI Perspective R&D Activities for Underwater Vehicles and Acoustic Communication 25 January, 211 Pan-Mook Lee Presentation Outline Vehicles 1. ROV & Depressor [Hemire/Henuvy, 27] 2. AUV [ISIMI1,
POGO 12 KORDI Perspective R&D Activities for Underwater Vehicles and Acoustic Communication 25 January, 211 Pan-Mook Lee Presentation Outline Vehicles 1. ROV & Depressor [Hemire/Henuvy, 27] 2. AUV [ISIMI1,
Closing Sale Prices. AmigoBot Pioneer 3-DX Pioneer 3-AT Pioneer LX Pioneer Manipulator PeopleBot PowerBot Seekur Jr
 10 Columbia Drive Amherst, NH 03031 USA T. +1.603.881.7960 F. +1.603.881.3818 www.mobilerobots.com Closing Prices 90 Day Warranty on all s Limited Quantities Available Models AmigoBot Pioneer 3-DX Pioneer
10 Columbia Drive Amherst, NH 03031 USA T. +1.603.881.7960 F. +1.603.881.3818 www.mobilerobots.com Closing Prices 90 Day Warranty on all s Limited Quantities Available Models AmigoBot Pioneer 3-DX Pioneer
VR to DL for UUST. lfremer
 VR to DL for UUST 1 operational tech testbed 1980 EPAULARD 1985 NAUTILE SIRENE - AUV «autonomous landing» 1998 VICTOR 6000 SWIMMER - AUV «autonomous docking» 2001 ALIVE-AUV «autonomous intervention» 2003
VR to DL for UUST 1 operational tech testbed 1980 EPAULARD 1985 NAUTILE SIRENE - AUV «autonomous landing» 1998 VICTOR 6000 SWIMMER - AUV «autonomous docking» 2001 ALIVE-AUV «autonomous intervention» 2003
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Hydrographic society
 Hydrographic society We Design, Build and Operate Unmanned Marine Systems Make a disruptive, revolutionary change to working at sea: - Reduce costs - Improve operational flexibility - Reduce risk to human
Hydrographic society We Design, Build and Operate Unmanned Marine Systems Make a disruptive, revolutionary change to working at sea: - Reduce costs - Improve operational flexibility - Reduce risk to human
Towed Streamer Positioning System
 Towed Streamer Positioning System Performance Data s towed streamer positioning system reduces the positional uncertainty for the entire towed streamer array by integrating horizontal and vertical streamer
Towed Streamer Positioning System Performance Data s towed streamer positioning system reduces the positional uncertainty for the entire towed streamer array by integrating horizontal and vertical streamer
ISSUE Construction and ROV Professionals Q2 / A Breakthrough in Hybrid Underwater Vehicles. The ECA Mine Counter Measure System
 8. A Breakthrough in Hybrid Underwater Vehicles 25. The ECA Mine Counter Measure System 31. The SeaTrepid Story 34. The Evolution of Single Beam Sonars for ROVs 11 The magazine of choice for Subsea ISSUE
8. A Breakthrough in Hybrid Underwater Vehicles 25. The ECA Mine Counter Measure System 31. The SeaTrepid Story 34. The Evolution of Single Beam Sonars for ROVs 11 The magazine of choice for Subsea ISSUE
More Tools in the Toolbox: The Naval Oceanographic Office s Remote Environmental Monitoring UnitS (REMUS) 6000 AUV
 6000 AUV") More Tools in the Toolbox: The Naval Oceanographic Office s Remote Environmental Monitoring UnitS (REMUS) 6000 AUV Kenneth M. Sharp and Randy H. White Naval Oceanographic Office Ocean Projects Department
More Tools in the Toolbox: The Naval Oceanographic Office s Remote Environmental Monitoring UnitS (REMUS) 6000 AUV Kenneth M. Sharp and Randy H. White Naval Oceanographic Office Ocean Projects Department
Wave Energy for Powering Science. VIMS Industry Partnership Meeting. February 17, 2012
 Wave Energy for Powering Science VIMS Industry Partnership Meeting February 17, 2012 Company Overview Commenced Operations: 1994 Incorporation: Delaware, USA Operating Locations: Pennington, NJ, USA and
Wave Energy for Powering Science VIMS Industry Partnership Meeting February 17, 2012 Company Overview Commenced Operations: 1994 Incorporation: Delaware, USA Operating Locations: Pennington, NJ, USA and
SOLAR ELECTRIC CATAMARAN AQUANIMA 45. w w w. a z u r a - m a r i n e. c o m
 SOLAR ELECTRIC CATAMARAN AQUANIMA 45 w w w. a z u r a - m a r i n e. c o m CONTENTS 1. Aquanima Concept 2. Design 3. Specifications 4. Speed & Range 5. Price List 2 1. AQUANIMA CONCEPT Solar electric yachts
SOLAR ELECTRIC CATAMARAN AQUANIMA 45 w w w. a z u r a - m a r i n e. c o m CONTENTS 1. Aquanima Concept 2. Design 3. Specifications 4. Speed & Range 5. Price List 2 1. AQUANIMA CONCEPT Solar electric yachts
Yulia Zarayskaya Rochelle Wigley
 for the On behalf of the GEBCO-NF Alumni Team Yulia Zarayskaya geozar@yandex.ru Geological Institute RAS Rochelle Wigley rochelle@ccom.unh.edu Center for Coastal and Ocean Mapping Non-profit organization
for the On behalf of the GEBCO-NF Alumni Team Yulia Zarayskaya geozar@yandex.ru Geological Institute RAS Rochelle Wigley rochelle@ccom.unh.edu Center for Coastal and Ocean Mapping Non-profit organization
A Hybrid AUV Design for Shallow Water Reef Navigation
 Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 A Hybrid AUV Design for Shallow Water Reef Navigation Matthew Dunbabin, Jonathan Roberts, Kane
Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 A Hybrid AUV Design for Shallow Water Reef Navigation Matthew Dunbabin, Jonathan Roberts, Kane
Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer. James Hailstones, ASV, Ltd.
 Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer James Hailstones, ASV, Ltd. Introduction Company ~70 employees worldwide. ASV established in 2010. ASV operations in USA
Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer James Hailstones, ASV, Ltd. Introduction Company ~70 employees worldwide. ASV established in 2010. ASV operations in USA
DEVELOPMENT OF THE AUTONOMOUS SURFACE CRAFT ACES
 DEVELOPMENT OF THE AUTONOMOUS SURFACE CRAFT ACES Justin E. Manley Massachusetts Institute of Technology Department of Ocean Engineering Sea Grant College Program Cambridge, MA 02 139 Abstract - At the
DEVELOPMENT OF THE AUTONOMOUS SURFACE CRAFT ACES Justin E. Manley Massachusetts Institute of Technology Department of Ocean Engineering Sea Grant College Program Cambridge, MA 02 139 Abstract - At the
DeepOcean Superior ROV
 DeepOcean Superior ROV combining high speed acoustic surveys and visual inspection Subops Haugesund 5 th August 2015 - Making a difference Company snapshot Vessels ROVs Trenchers & Ploughs Owned: 7 Long
DeepOcean Superior ROV combining high speed acoustic surveys and visual inspection Subops Haugesund 5 th August 2015 - Making a difference Company snapshot Vessels ROVs Trenchers & Ploughs Owned: 7 Long
Sabertooth A Hybrid AUV/ROV offshore system. Jan Siesjö Chief Engineer
 Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
SurfROVer: An ROV for Littoral Zone Survey Work
 XXX-X-XXXX-XXXX-X/XX/$XX.00 20XX IEEE SurfROVer: An ROV for Littoral Zone Survey Work Timothy Crandle PhD tcrandle@seaviewsystems.com Matthew Cook Geoffrey Cook Edward Celkis Abstract Powered umbilical
XXX-X-XXXX-XXXX-X/XX/$XX.00 20XX IEEE SurfROVer: An ROV for Littoral Zone Survey Work Timothy Crandle PhD tcrandle@seaviewsystems.com Matthew Cook Geoffrey Cook Edward Celkis Abstract Powered umbilical
"It is more than the fuel matters The Full Picture integrated solutions"
 "It is more than the fuel matters The Full Picture integrated solutions" Image: Qatar Gas Polish - Norwegian Maritime Business Forum, September 3-4, 2013, Gdańsk, Poland / 1/ 17-Sep-13 WORLD CLASS through
"It is more than the fuel matters The Full Picture integrated solutions" Image: Qatar Gas Polish - Norwegian Maritime Business Forum, September 3-4, 2013, Gdańsk, Poland / 1/ 17-Sep-13 WORLD CLASS through
Underwater Remotely Operated Vehicles (ROV) Drive & Dive Motion Solutions
 Drive & Dive Motion Solutions") Underwater Remotely Operated Vehicles (ROV) Drive & Dive Motion Solutions Deep sea exploration - where motion matters Elmo s motion solutions are ideal for the ever advancing world of underwater remotely
Underwater Remotely Operated Vehicles (ROV) Drive & Dive Motion Solutions Deep sea exploration - where motion matters Elmo s motion solutions are ideal for the ever advancing world of underwater remotely
AUTONOMOUS UNDERWATER VEHICLE DESIGNED TO BE USED IN ANTISUBMARINE WARFARE
 AUTONOMOUS UNDERWATER VEHICLE DESIGNED TO BE USED IN ANTISUBMARINE WARFARE Vasile DOBREF 1 Octavian TĂRĂBUŢĂ 2 Cătălin CLINCI 3 1 Captain, Assoc. Professor PhD, Mircea cel Batran Naval Academy, Constanta,
AUTONOMOUS UNDERWATER VEHICLE DESIGNED TO BE USED IN ANTISUBMARINE WARFARE Vasile DOBREF 1 Octavian TĂRĂBUŢĂ 2 Cătălin CLINCI 3 1 Captain, Assoc. Professor PhD, Mircea cel Batran Naval Academy, Constanta,
Development: Server Vehicle Rendezvous
 United States Out-of-Water Test Methods to Accelerate Implementation of Autonomous Rendezvous in the NPS ARIES AUV CAPT J.W. Nicholson, Ph.D. United States Development: Server Vehicle Rendezvous 350 300
United States Out-of-Water Test Methods to Accelerate Implementation of Autonomous Rendezvous in the NPS ARIES AUV CAPT J.W. Nicholson, Ph.D. United States Development: Server Vehicle Rendezvous 350 300
Design and Simulation of New Versions of Tube Launched UAV
 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
Maritime State University AUV TEAM Autonomous underwater vehicle for RoboSub 2015
 Maritime State University AUV TEAM Autonomous underwater vehicle for RoboSub 2015 Igor Pushkarev, Nikolai Sergeenko, Vladislav Bolotov, Dmitrii Nechepurenko, Vadim Sorin, Ruslan Revel, Dmitrii Khokhlov,
Maritime State University AUV TEAM Autonomous underwater vehicle for RoboSub 2015 Igor Pushkarev, Nikolai Sergeenko, Vladislav Bolotov, Dmitrii Nechepurenko, Vadim Sorin, Ruslan Revel, Dmitrii Khokhlov,
Design and Navigation of Flying Robots
 Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition
 Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Electric Penguin s philosophy:
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Development of Fuel Cell System for Long Cruising Lange Autonomous Underwater Vehicle
 Development of Fuel Cell System for Long Cruising Lange Autonomous Underwater Vehicle 3.4 Tadahiro Hyakudome, Takeshi Nakatani, Hiroshi Yoshida, Marine Technology and Engineering Center, JAMSTEC Toshihiro
Development of Fuel Cell System for Long Cruising Lange Autonomous Underwater Vehicle 3.4 Tadahiro Hyakudome, Takeshi Nakatani, Hiroshi Yoshida, Marine Technology and Engineering Center, JAMSTEC Toshihiro
SeaRobotics Facility. Integrated Facility for the Design and Build and Test. Location. Facility. Test Capability
 1 SeaRobotics Facility Location Located in Stuart, Florida 26 miles north of Riviera Beach ¼ mile from I-95 Facility 1400 square meters in Treasure Coast Commerce Park 400 m2, Engineering, Integration
1 SeaRobotics Facility Location Located in Stuart, Florida 26 miles north of Riviera Beach ¼ mile from I-95 Facility 1400 square meters in Treasure Coast Commerce Park 400 m2, Engineering, Integration
PAVIA FERRARA TORINO PARMA ANCONA FIRENZE ROMA
 1 The ARGO Autonomous Vehicle Massimo Bertozzi 1, Alberto Broggi 2, and Alessandra Fascioli 1 1 Dipartimento di Ingegneria dell'informazione Universita di Parma, I-43100 PARMA, Italy 2 Dipartimento di
1 The ARGO Autonomous Vehicle Massimo Bertozzi 1, Alberto Broggi 2, and Alessandra Fascioli 1 1 Dipartimento di Ingegneria dell'informazione Universita di Parma, I-43100 PARMA, Italy 2 Dipartimento di
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
ORCA XI: An Autonomous Underwater Vehicle
 ORCA XI:AnAutonomousUnderwaterVehicle YazanAldehayyat,RichardDahan,ImanFayyad, JeanMartin,MatthewPerkins,RachelSharples MassachusettsInstituteofTechnology ProjectORCA 77MassachusettsAvenue,Room4 405 Cambridge,MA02139
ORCA XI:AnAutonomousUnderwaterVehicle YazanAldehayyat,RichardDahan,ImanFayyad, JeanMartin,MatthewPerkins,RachelSharples MassachusettsInstituteofTechnology ProjectORCA 77MassachusettsAvenue,Room4 405 Cambridge,MA02139
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
There are several limitations to autonomous. The REx. (mt notes) MIT Sea Grant s autonomous vessel for data acquisition and dissemination
 MIT Sea Grant s autonomous vessel for data acquisition and dissemination") (mt notes) REx IV deployed on the Charles River in Boston, MA. The REx MIT Sea Grant s autonomous vessel for data acquisition and dissemination BY MICHAEL DEFILIPPO There are several limitations to autonomous
(mt notes) REx IV deployed on the Charles River in Boston, MA. The REx MIT Sea Grant s autonomous vessel for data acquisition and dissemination BY MICHAEL DEFILIPPO There are several limitations to autonomous
Fred. Olsen POWER GENERATION AT SEA. Autonomous Sea Power. Fred.Olsen Ltd.
 Author: Even Hjetland even.hjetland@fredolsen.no Date: Dec. 12th 2017 Revision: Type: Q For email/download Fred. Olsen Autonomous Sea Power POWER GENERATION AT SEA POWER SUPPLY AND COMMUNICATION PLATFORM
Author: Even Hjetland even.hjetland@fredolsen.no Date: Dec. 12th 2017 Revision: Type: Q For email/download Fred. Olsen Autonomous Sea Power POWER GENERATION AT SEA POWER SUPPLY AND COMMUNICATION PLATFORM
The Development of an Autonomous Shuttle Ferry in Trondheim Associate Professor Egil Eide, Department of Electronics Systems, NTNU
 The Development of an Autonomous Shuttle Ferry in Trondheim Associate Professor Egil Eide, Department of Electronics Systems, NTNU Technologically feasible Scalable and reconfigurable A new tourist attraction
The Development of an Autonomous Shuttle Ferry in Trondheim Associate Professor Egil Eide, Department of Electronics Systems, NTNU Technologically feasible Scalable and reconfigurable A new tourist attraction
Autonomous Ships E-NAVIGATION UNDERWAY November 7, William Westmoreland Adrian Paruas
 E-NAVIGATION UNDERWAY 2018 Autonomous Ships November 7, 2018 William Westmoreland Adrian Paruas KONGSBERG PROPRIETARY: This document contains KONGSBERG information which is proprietary and c onfidential.
E-NAVIGATION UNDERWAY 2018 Autonomous Ships November 7, 2018 William Westmoreland Adrian Paruas KONGSBERG PROPRIETARY: This document contains KONGSBERG information which is proprietary and c onfidential.
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Fred. Olsen POWER GENERATION AT SEA. Autonomous Sea Power «POWER AND GATEWAY SUBSEA» Fred.Olsen Ltd.
 Author: Even Hjetland even.hjetland@fredolsen.no Date: Sept. 5th 2017 Revision: Type: O For email/download «POWER AND GATEWAY SUBSEA» Fred. Olsen Autonomous Sea Power POWER GENERATION AT SEA POWER SUPPLY
Author: Even Hjetland even.hjetland@fredolsen.no Date: Sept. 5th 2017 Revision: Type: O For email/download «POWER AND GATEWAY SUBSEA» Fred. Olsen Autonomous Sea Power POWER GENERATION AT SEA POWER SUPPLY
Capital Markets Day 2007 Kongsberg Maritime 25 September 20O7
 Capital Markets Day 27 Kongsberg Maritime 25 September 2O7 WORLD CLASS through people, technology and dedication 1 Kongsberg Maritime Offshore & Merchant Marine Offshore & Merchant Marine Introduction
Capital Markets Day 27 Kongsberg Maritime 25 September 2O7 WORLD CLASS through people, technology and dedication 1 Kongsberg Maritime Offshore & Merchant Marine Offshore & Merchant Marine Introduction
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Evolution of the Autonomous Surface Craft AutoCat
 Evolution of the Autonomous Surface Craft AutoCat Justin E. Manley ', Aaron Marsh2, Whitney Comforth3, Colette Wiseman3 Massachusetts Institute of Technology, 'Research Engineer, Sea Grant College Program
Evolution of the Autonomous Surface Craft AutoCat Justin E. Manley ', Aaron Marsh2, Whitney Comforth3, Colette Wiseman3 Massachusetts Institute of Technology, 'Research Engineer, Sea Grant College Program
Hydrography Integrated Systems and Platforms
 Kongsberg Maritime Subsea Hydrography Integrated Systems and Platforms 15 th MACHC Meeting, Manzanillo, Mexico, 11 th to 13 th December 2014. Jan Haug Kristensen Regional Manager Americas Subsea Sales
Kongsberg Maritime Subsea Hydrography Integrated Systems and Platforms 15 th MACHC Meeting, Manzanillo, Mexico, 11 th to 13 th December 2014. Jan Haug Kristensen Regional Manager Americas Subsea Sales
An Indoor Aerial Robot for Herding Ground Robots
 An Indoor Aerial Robot for Herding Ground Robots 1 June 2014 Frank Manning Pima Community College Yanitzin Todd Embry-Riddle Aeronautical University, Presott Tim Worden The Boeing Company [1] Abstract
An Indoor Aerial Robot for Herding Ground Robots 1 June 2014 Frank Manning Pima Community College Yanitzin Todd Embry-Riddle Aeronautical University, Presott Tim Worden The Boeing Company [1] Abstract
SPARTAN. Date: All rights reserved 2011, Thales Alenia Space. Business Unit Space Infrastructures & Transportation
 SPARTAN Date: Business Unit Space Infrastructures & Transportation February the 17 2011 All rights reserved 2011, Thales Alenia Space Project Overview 2 From 3 rd Fp7 Space Call Grant Agreement n. 262837
SPARTAN Date: Business Unit Space Infrastructures & Transportation February the 17 2011 All rights reserved 2011, Thales Alenia Space Project Overview 2 From 3 rd Fp7 Space Call Grant Agreement n. 262837
WORLD CLASS through people, technology and dedication. KONGSBERG September 20,
 WORLD CLASS through people, technology and dedication KONGSBERG September 20, 2006 1 Kongsberg Maritime Offshore & Merchant Marine Focusing on core technologies building strong application knowledge sales
WORLD CLASS through people, technology and dedication KONGSBERG September 20, 2006 1 Kongsberg Maritime Offshore & Merchant Marine Focusing on core technologies building strong application knowledge sales
CLV SIA. Vessel Specification. M-Tech Offshore Torskekaj Esbjerg, Denmark
 Vessel Specification DP-2 CABLE LAYING VESSEL CONFIGURED FOR SUBSEA POWER CABLE INSTALLATIONS AND INTER-ARRAY LINKS The CLV SIA is acquired by M-Tech Offshore A/S, a Danish Company equally owned by NT
Vessel Specification DP-2 CABLE LAYING VESSEL CONFIGURED FOR SUBSEA POWER CABLE INSTALLATIONS AND INTER-ARRAY LINKS The CLV SIA is acquired by M-Tech Offshore A/S, a Danish Company equally owned by NT
Photo by Kirill Egorov. Photo by Kirill Egorov. Photo by Kirill Egorov
 The Suex Advanced Diving Vehicles represent the cutting-edge technology of underwater mobility. Permormance, reliability, manoeuvrability, complete product range and the excellent after-market service
The Suex Advanced Diving Vehicles represent the cutting-edge technology of underwater mobility. Permormance, reliability, manoeuvrability, complete product range and the excellent after-market service
2012 AUVSI SUAS Student Competition Journal Paper. Kansas State University Salina UAS Club. Prepared By: Mark Wilson Coby Tenpenny Colby Walter
 2012 AUVSI SUAS Student Competition Journal Paper Kansas State University Salina UAS Club Prepared By: Mark Wilson Coby Tenpenny Colby Walter May 14, 2012 Willie Abstract The Willie Unmanned Aerial System
2012 AUVSI SUAS Student Competition Journal Paper Kansas State University Salina UAS Club Prepared By: Mark Wilson Coby Tenpenny Colby Walter May 14, 2012 Willie Abstract The Willie Unmanned Aerial System
Items to specify: 4. Motor Speed Control. Head Unit. Radar. Steering Wheel Angle. ego vehicle speed control
 Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
KYSTDESIGN SUPPORTER Work Class ROV
 KYSTDESIGN SUPPORTER Work Class ROV Heavy duty work class ROV 150 Hp HPU 3000 m depth rated Through frame lift capacity of 3 t Top hat TMS with 500 m tether capacity Interface prepared for advanced survey
KYSTDESIGN SUPPORTER Work Class ROV Heavy duty work class ROV 150 Hp HPU 3000 m depth rated Through frame lift capacity of 3 t Top hat TMS with 500 m tether capacity Interface prepared for advanced survey
Design and Development of the UTSA Unmanned Aerial System ACE 1
 Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
The Riptide µuuv. Dr. Dani Goldberg MOOS-DAWG, Aug 2017
 The Riptide µuuv Dr. Dani Goldberg MOOS-DAWG, Aug 2017 Who We Are Started in January 2015 Principals Jeffrey Smith CEO 20+ years Defense, 10+ years in UUVs John Vestri COO/CFO 8 years in ROVs Dr. Dani
The Riptide µuuv Dr. Dani Goldberg MOOS-DAWG, Aug 2017 Who We Are Started in January 2015 Principals Jeffrey Smith CEO 20+ years Defense, 10+ years in UUVs John Vestri COO/CFO 8 years in ROVs Dr. Dani
ACADEMIC SPIN-OFF COMPANY OF THE SCUOLA SUPERIORE SANT ANNA OF PISA. Member of the Club of spin-off companies
 SERVICE ROBOTICS ACADEMIC SPIN-OFF COMPANY OF THE SCUOLA SUPERIORE SANT ANNA OF PISA Member of the Club of spin-off companies DESIGNS AND DEVELOPS ROBOTIC SOLUTIONS FOR SPECIFIC APPLICATIONS DESIGNS AND
SERVICE ROBOTICS ACADEMIC SPIN-OFF COMPANY OF THE SCUOLA SUPERIORE SANT ANNA OF PISA Member of the Club of spin-off companies DESIGNS AND DEVELOPS ROBOTIC SOLUTIONS FOR SPECIFIC APPLICATIONS DESIGNS AND
Cilantro. Old Dominion University. Team Members:
 Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Development and Tests of an Automatic Decking System Demonstrator of VTOL UAV on Naval Platform
 System Demonstrator of VTOL UAV on Naval Platform Olivier Doucy, Nicolas Cellier, Philippe Corrignan SIREHNA 1, rue de la Noe BP42105 44321 Nantes Cedex 3 FRANCE sirehna@sirehna.com ABSTRACT SIREHNA has
System Demonstrator of VTOL UAV on Naval Platform Olivier Doucy, Nicolas Cellier, Philippe Corrignan SIREHNA 1, rue de la Noe BP42105 44321 Nantes Cedex 3 FRANCE sirehna@sirehna.com ABSTRACT SIREHNA has
work class ROV- Inspire your future
 work class ROV- Inspire your future Leading ROV producer KYSTDESIGN is one of the leading ROV producers in the world today. KYSTDESIGN consists of multi-discipline engineering teams, with specialists in
work class ROV- Inspire your future Leading ROV producer KYSTDESIGN is one of the leading ROV producers in the world today. KYSTDESIGN consists of multi-discipline engineering teams, with specialists in
A brief History of Unmanned Aircraft
 A brief History of Unmanned Aircraft Technological Background Dr. Bérénice Mettler University of Minnesota Jan. 22-24, 2012 (v. 1/15/13) Dr. Bérénice Mettler (University of Minnesota) A brief History of
A brief History of Unmanned Aircraft Technological Background Dr. Bérénice Mettler University of Minnesota Jan. 22-24, 2012 (v. 1/15/13) Dr. Bérénice Mettler (University of Minnesota) A brief History of
PENGUIN B UAV PLATFORM
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v.0 PENGUIN B UAV PLATFORM Penguin B platform ready for payload and autopilot integration 0+ hour endurance Fuel injected engine option Up to 10 kg payload capacity
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v.0 PENGUIN B UAV PLATFORM Penguin B platform ready for payload and autopilot integration 0+ hour endurance Fuel injected engine option Up to 10 kg payload capacity
Deliverable 3 Autonomous Flight Record
 Deliverable 3 Autonomous Flight Record 2012 UAV Outback Challenge Search and Rescue Challenge www.canberrauav.com Proudly Sponsored by: Paul Tridgell Terry Porter Grant Morphett Ron Graham Page 1 of 11
Deliverable 3 Autonomous Flight Record 2012 UAV Outback Challenge Search and Rescue Challenge www.canberrauav.com Proudly Sponsored by: Paul Tridgell Terry Porter Grant Morphett Ron Graham Page 1 of 11
The Rise of Maritime Autonomous Systems. Richard Daltry CEng, MRINA Technical Director, ASV
 The Rise of Maritime Autonomous Systems Richard Daltry CEng, MRINA Technical Director, ASV The Rise of Maritime Autonomous Systems (MAS) Contents Overview of ASV The development of Maritime Autonomous
The Rise of Maritime Autonomous Systems Richard Daltry CEng, MRINA Technical Director, ASV The Rise of Maritime Autonomous Systems (MAS) Contents Overview of ASV The development of Maritime Autonomous
CETUS - EOD Robotic Work Package
 CETUS - EOD Robotic Work Package Christopher K. DeBolt Naval Explosive Ordnance Disposal Technology Division (NAVEODTECHDIV) Code 50A29 2008 Stump Neck Road Indian Head, MD 20640-5070 phone: (301) 744-6850
CETUS - EOD Robotic Work Package Christopher K. DeBolt Naval Explosive Ordnance Disposal Technology Division (NAVEODTECHDIV) Code 50A29 2008 Stump Neck Road Indian Head, MD 20640-5070 phone: (301) 744-6850
Self-Powered Autonomous Aquatic Vehicle (SPAAV)
") Self-Powered Autonomous Aquatic Vehicle (SPAAV) Multidisciplinary Senior Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number:
Self-Powered Autonomous Aquatic Vehicle (SPAAV) Multidisciplinary Senior Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 Project Number:
Length Height Rotor Diameter Tail Rotor Diameter..12. Tail Boom Length Width
 2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
NEW JAPANESE SURVEY VESSEL TAKUYO
 International Hydrographie Review, Monaco, LXI1 (2), July 1985 NEW JAPANESE SURVEY VESSEL TAKUYO by Akira NAKANISHI'*' ABSTRACT The Hydrographic Department, Maritime Safety Agency, Japan, has commissioned
International Hydrographie Review, Monaco, LXI1 (2), July 1985 NEW JAPANESE SURVEY VESSEL TAKUYO by Akira NAKANISHI'*' ABSTRACT The Hydrographic Department, Maritime Safety Agency, Japan, has commissioned
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Efficient and flexible solution
 Efficient and flexible solution for the most demanding clients Bourbon PX 105 MACS Series of Large Platform Supply Vessels Bourbon Front - Bourbon Clear - Bourbon Calm - Bourbon Rainbow Bourbon PX 105
Efficient and flexible solution for the most demanding clients Bourbon PX 105 MACS Series of Large Platform Supply Vessels Bourbon Front - Bourbon Clear - Bourbon Calm - Bourbon Rainbow Bourbon PX 105
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Liquid Robotics Wave Glider. 6 th EGO Meeting 17 June Miguel Moll / EMS & Francois Leroy / LR
 Liquid Robotics Wave Glider 6 th EGO Meeting 17 June 2014 Miguel Moll / EMS & Francois Leroy / LR 2013 Liquid Robotics, Inc. 1329 Moffett Park Drive, Sunnyvale, CA 94089, USA. All Rights Reserved. Oceans
Liquid Robotics Wave Glider 6 th EGO Meeting 17 June 2014 Miguel Moll / EMS & Francois Leroy / LR 2013 Liquid Robotics, Inc. 1329 Moffett Park Drive, Sunnyvale, CA 94089, USA. All Rights Reserved. Oceans
RV Geofizik Specification Datasheet
 RV Geofizik Specification Datasheet General Information Flag Russian Federation Owner JSC MAGE Year of Building 1983 Place of Building Khabarovsk Reequipped 2004 Register Class KM * L 2[I] Type Research
RV Geofizik Specification Datasheet General Information Flag Russian Federation Owner JSC MAGE Year of Building 1983 Place of Building Khabarovsk Reequipped 2004 Register Class KM * L 2[I] Type Research
DG-60M/540T BARBAROS Class PATROL BOAT ASuW, ASW, AAW
 (1 / 7) DESIGN : By DUZGIT GEMİ İNSA SAN. A.Ş. PLATFORM : Length OA = 60,00 mts Length BP = 55,50 mts Breadth mld = 8,90 mts Depth to main deck = 5,50 mts Design draft (mld) = 2,43 mts Design draft (extreme)
(1 / 7) DESIGN : By DUZGIT GEMİ İNSA SAN. A.Ş. PLATFORM : Length OA = 60,00 mts Length BP = 55,50 mts Breadth mld = 8,90 mts Depth to main deck = 5,50 mts Design draft (mld) = 2,43 mts Design draft (extreme)
Operations with Multiple Autonomous Underwater Vehicles: the PISCIS Project
 Operations with Multiple Autonomous Underwater Vehicles: the PISCIS Project Nuno Cruz, Aníbal Matos, João Borges de Sousa, Fernando Lobo Pereira, Jorge Silva, Eduardo Silva, João Coimbra and Emílio Brogueira
Operations with Multiple Autonomous Underwater Vehicles: the PISCIS Project Nuno Cruz, Aníbal Matos, João Borges de Sousa, Fernando Lobo Pereira, Jorge Silva, Eduardo Silva, João Coimbra and Emílio Brogueira
Development of an Environment-Sensitive Navigation System for the AUV Autolycus
 Marine Technology, Vol. 37, No. 4, October 2000, pp. 238 245 Development of an Environment-Sensitive Navigation System for the AUV Autolycus Whitney Cornforth 1 and Katherine Croff 1 The development of
Marine Technology, Vol. 37, No. 4, October 2000, pp. 238 245 Development of an Environment-Sensitive Navigation System for the AUV Autolycus Whitney Cornforth 1 and Katherine Croff 1 The development of
OML INTERVENTION I. Diesel Electric/ Self-Propelled/ Self-Elevating/ DPS-2 Accommodation/ Maintenance Jack-Up Barge PRINCIPAL PARTICULARS
 OML INTERVENTION I Diesel Electric/ Self-Propelled/ Self-Elevating/ DPS-2 Accommodation/ Maintenance Jack-Up Barge PRINCIPAL PARTICULARS Year Built 2017 GRT / NRT 8100 / 2430 Hull No DJHC8008 Flag PANAMA
OML INTERVENTION I Diesel Electric/ Self-Propelled/ Self-Elevating/ DPS-2 Accommodation/ Maintenance Jack-Up Barge PRINCIPAL PARTICULARS Year Built 2017 GRT / NRT 8100 / 2430 Hull No DJHC8008 Flag PANAMA
Cybercars : Past, Present and Future of the Technology
 Cybercars : Past, Present and Future of the Technology Michel Parent*, Arnaud de La Fortelle INRIA Project IMARA Domaine de Voluceau, Rocquencourt BP 105, 78153 Le Chesnay Cedex, France Michel.parent@inria.fr
Cybercars : Past, Present and Future of the Technology Michel Parent*, Arnaud de La Fortelle INRIA Project IMARA Domaine de Voluceau, Rocquencourt BP 105, 78153 Le Chesnay Cedex, France Michel.parent@inria.fr
1 HYDROGEN. Hydrogen is the lightest element and the most abundant chemical substance in nature, constituting roughly 75% of the Universe's mass
 1 1 HYDROGEN Hydrogen is the lightest element and the most abundant chemical substance in nature, constituting roughly 75% of the Universe's mass Fuel Cells are the best system to transform hydrogen into
1 1 HYDROGEN Hydrogen is the lightest element and the most abundant chemical substance in nature, constituting roughly 75% of the Universe's mass Fuel Cells are the best system to transform hydrogen into
Defense Green Technology of KOREA
 Defense Green Technology of KOREA March 18th 2010 Dr. In Woo Kim Agency for Defense Development 1 Contents Introduction of ADD Mission To Research, Develop, Test and Evaluate Weapon systems, Equipments,
Defense Green Technology of KOREA March 18th 2010 Dr. In Woo Kim Agency for Defense Development 1 Contents Introduction of ADD Mission To Research, Develop, Test and Evaluate Weapon systems, Equipments,
Munin S-1200 open version
 Munin S-1200 open version Norsafe Project No.: xxxxxxxxxxx Norsafe Doc. No.: TSB-0274 Rev. Date: 27.03.2018 Rev. No: 1 Norsafe AS P.O. Box 115 N-4852 Faervik, Norway Tel: +47 37 05 85 00 Fax: +47 37 05
Munin S-1200 open version Norsafe Project No.: xxxxxxxxxxx Norsafe Doc. No.: TSB-0274 Rev. Date: 27.03.2018 Rev. No: 1 Norsafe AS P.O. Box 115 N-4852 Faervik, Norway Tel: +47 37 05 85 00 Fax: +47 37 05
Palamede, more than a microsatellite. Workshop on University Micro Satellites in Italy Rome, July 27, 2005
 Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Integrated Airborne Surveillance Systems. November 2014
 Integrated Airborne Surveillance Systems November 2014 Integrated Airborne Surveillance Systems ATOS Mission System for Manned Platforms Unmanned Aerial Systems (UAS) 2 ATOS Mission System ATOS (Airborne
Integrated Airborne Surveillance Systems November 2014 Integrated Airborne Surveillance Systems ATOS Mission System for Manned Platforms Unmanned Aerial Systems (UAS) 2 ATOS Mission System ATOS (Airborne
SeaSlug: A high-uptime, long-deployment mobile marine sensor platform
 SeaSlug: A high-uptime, long-deployment mobile marine sensor platform Bryant Mairs 1 and Gabriel Elkaim 2 Abstract This work describes a new autonomous surface vessel (ASV) for marine sensing applications.
SeaSlug: A high-uptime, long-deployment mobile marine sensor platform Bryant Mairs 1 and Gabriel Elkaim 2 Abstract This work describes a new autonomous surface vessel (ASV) for marine sensing applications.
SubjuGator 2015: Design and Implementation of a Modular, High-Performance AUV
 SubjuGator 2015: Design and Implementation of a Modular, High-Performance AUV J. Nezvadovitz 1, M. Griessler, F. Voight, P. Walters, E. M. Schwartz jnezvadovitz@ufl.edu, mgriessler@ufl.edu, forrestv@ufl.edu,
SubjuGator 2015: Design and Implementation of a Modular, High-Performance AUV J. Nezvadovitz 1, M. Griessler, F. Voight, P. Walters, E. M. Schwartz jnezvadovitz@ufl.edu, mgriessler@ufl.edu, forrestv@ufl.edu,
Small UAV A French MoD perspective and planning
 Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
Fully integrated streamer // steering system
 Nautilus Fully integrated streamer // steering system The three-in-one Nautilus device offers acoustic positioning, depth control and automatic steering in a single unit. Fully integrated and compatible
Nautilus Fully integrated streamer // steering system The three-in-one Nautilus device offers acoustic positioning, depth control and automatic steering in a single unit. Fully integrated and compatible
DOBBY Pocket Drone. Quick Start Guide V2.1
 DOBBY Pocket Drone Quick Start Guide V2.1 Aircraft The DOBBY Pocket Drone is pocket-sized and foldable flying camera for everyone, featuring Auto Pull-away Short Video, Target Tracking, Orbit shooting
DOBBY Pocket Drone Quick Start Guide V2.1 Aircraft The DOBBY Pocket Drone is pocket-sized and foldable flying camera for everyone, featuring Auto Pull-away Short Video, Target Tracking, Orbit shooting
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
DRONE & UAV.
 www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
THE FALCON REDUNDANCY HIGH WIND TOLERANCE BEST USED FOR SURVEILLANCE & SECURITY DELIVERY & TRANSPORT
 THE FALCON REDUNDANCY HIGH WIND TOLERANCE The Falcon's new air frame and motor configuration is the new best in its class of light payloads with flight times of up to 50 minutes. This makes the Falcon
THE FALCON REDUNDANCY HIGH WIND TOLERANCE The Falcon's new air frame and motor configuration is the new best in its class of light payloads with flight times of up to 50 minutes. This makes the Falcon
Oregon State University Autonomous Aerial Robotics Team 2014 International Aerial Robotics Competition
 Oregon State University Autonomous Aerial Robotics Team 2014 International Aerial Robotics Competition Kyle Cesare, Team Lead, cesarek@onid.oregonstate.edu, 208-409-6177 Soo-Hyun Yoo, Ryan McAfee, Nathan
Oregon State University Autonomous Aerial Robotics Team 2014 International Aerial Robotics Competition Kyle Cesare, Team Lead, cesarek@onid.oregonstate.edu, 208-409-6177 Soo-Hyun Yoo, Ryan McAfee, Nathan
AZIMUT 38 MAIN CHARACTERISTICS. Miami. Location: Price: $ Model Year: 2011 Engines hours: Generator hours
 AZIMUT 38 HULL N. 45 The unit is a second hand motoryacht selected by Azimut Yachts Service Team to guarantee the maximum peace of mind to the future owners searching for a pre-owned vessel. All boats
AZIMUT 38 HULL N. 45 The unit is a second hand motoryacht selected by Azimut Yachts Service Team to guarantee the maximum peace of mind to the future owners searching for a pre-owned vessel. All boats
Smart Control for Electric/Autonomous Vehicles
 Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global