UAV Enabled Measurement for Spatial Magnetic Field of Smart Rocks in Bridge Scour Monitoring
|
|
|
- Donna Ferguson
- 5 years ago
- Views:
Transcription

1 INSPECTING AND PRESERVING INFRASTRUCTURE THROUGH ROBOTIC EXPLORATION UAV Enabled Measurement for Spatial Magnetic Field of Smart Rocks in Bridge Scour Monitoring Genda Chen, PhD. P.E., Professor and INSPIRE UTC Director Haibin Zhang and Zhaochao Li Missouri University of Science and Technology (Missouri S&T) August 14, 2018
2 Outline of This Presentation Introduction Needs for bridge scour monitoring Scour mechanism and monitoring techniques Concept of Smart Rocks The smart rock technology and applications Proof-of-concept testing System Integration Magnetometer and GPS installed on a UAV Motor effect on magnetic field measurement Field Studies Magnetic field interference of two smart rocks Crane vs UAV based measurement accuracy Concluding Remarks

3 Introduction Needs for Bridge Scour Monitoring



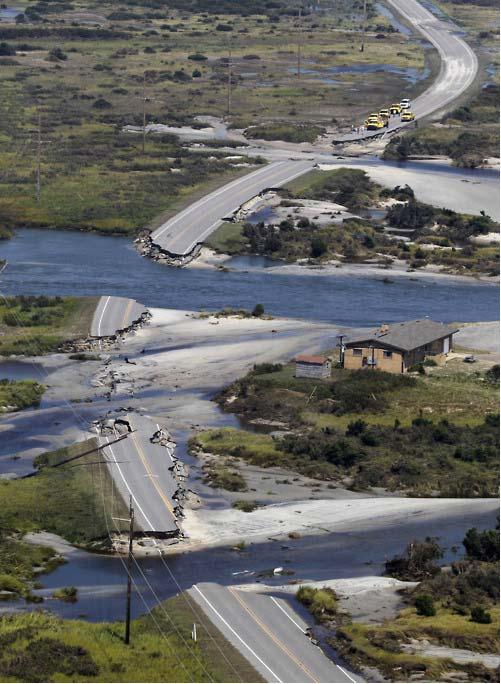
4 Introduction Disruption to Service Threat to Safety Cost to Scour Mitigation
5 Introduction Scour Mechanism An engineering term for the erosion of riverbed deposits caused by complex water flow around a bridge foundation (piers and abutments) L.J. Prendergast, K. Gavin. A review of bridge scour monitoring techniques. Journal of Rock Mechanics and Geotechnical Engineering. 2014; ~149
6 Introduction Existing Scour Monitoring Methods Fixed instrumentation Magnetic sliding collar Tilt sensor Float-out device Time domain reflectometry Fiber optic sensor Piezoelectric film sensor Temperature sensor Vibration based methods Smart scour sensor Medium property sensor Portable instrumentation Radar Sonar Sounding rods Radio-Controlled Boat Tracking or imaging sensor Questions: How critical of the measured information when the initiation of a scour hole is unknown? How rugged to operate in harsh environment? Problem: Too risky to operate during a flood event
7 Introduction Objectives To develop a moving unmanned aerial vehicle (UAV) platform for rapid measurement of magnetic field, To characterize the movement of smart rocks deployed at the riverbed near a bridge pier based on the air-borne measurement difference of magnetic fields before and after deployment of the smart rocks, and To evaluate the field performance of the smart rocks for real time monitoring of bridge scour during significant flood events.
8 Introduction The Scope of Work in Years 1 and 2 is To design, build, and test a UAV with no more than 90-N payload of a 3-axis magnetometer, a lightweight onboard computer, and one or two batteries for at least 20 minute operation in field condition, To establish the relation between the flight speed and the sampling rate of the magnetometer, To evaluate the localization accuracy of one, two, and three smart rocks. To develop a ground-referenced GPS on a UAV to accurately measure its coordinates, To investigate the potential effect of UAV rotations on magnetic field measurements, and To demonstrate the field performance of smart rocks with a UAV-supported 3-axis magnetometer at bridge sites.

9 Concept of Smart Rocks The Technology A magnet is embedded in a concrete encasement or a natural rock. The magnetic field intensity of the magnet is measured with a magnetometer at distance. The intensity measurements at three or more stations allow the determination of the magnet s location. I=intensity, D=distance I#1 represents a measurement at Station#1 I#2 represents a measurement at Station#2 I#3 represents a measurement at Station#3 Station #1 Station #3 Station #2


10 Concept of Smart Rocks Application Scenarios Maximum Scour Depth around a pier or abutment for design and retrofit. A smart rock rolls to the bottom of a scour hole when formed with unknown location and depth as deposits around the hole are washed away. Rip-rap countermeasure effectiveness. A smart rock is mixed with natural rocks as a riprap measure to foundation scour. As it moves, the scour countermeasure begins compromised. Fig. 2 Scour Countermeasure Monitoring





11 Concept of Smart Rocks Proof-of-concept Test at TFHRC Hydraulic Engineering Laboratory One rock with an embedded small magnet Two rocks with embedded small magnets Initial rocking 1 st rock sliding Sliding 1 st rock rotating 2 nd rock sliding & rotating



12 Concept of Smart Rocks Proof-of-concept Test at TFHRC Hydraulic Engineering Laboratory 7/16 by 1 magnet embedded in a plastic sphere and placed in front of a small-scale pier model





13 Concept of Smart Rocks Proof-of-Concept Test with One Rock 18 cm Genda Chen, Brandon Schafer, Zhibin Lin, Ying Huang, Oscar Suaznabar, Jerry Shen, and Kornel Kerenyi. Maximum Scour Depth Based on Magnetic Field Change of Smart Rocks for Foundation Stability Evaluation of Bridges. Structural Health Monitoring, 14(1): 86 99, January 2015




14 Concept of Smart Rocks Proof-of-Concept Test with Five Smart Rocks Smart rock location Intensity change over time with intensity-distance correlation
15 System Integration Rapid Collection of Dense Data with a UAV Can improve the accuracy of smart rock localization and movement prediction at bridge sites. GPS Integration into the UAV A HERE+ GPS module uses a GPS unit at a known ground reference location and another unit on the UAV. The ground unit gives a GPS drift error for the location that is currently being used, and relays that drift to the unit on the drone which then calculates a position within a 2 cm bubble. The ground reference point can be obtained either by using established USGS markers or measuring the drift in a specific location over time before flying. The selfestablished position can be reused if the ground unit s location is unchanged during future deployments.

16 System Integration Magnetometer Integration into the UAV A 3-axis magnetometer is fixed with two truss members on the UAV. An Ethernet cable is used to connect the magnetometer to a CPU on the UAV. The drone is equipped with multiple compass units to track its heading within 0.2 degrees. If the compasses are in disagreement, the compass health errors will display on the UAV ground station software and a recalibration is required when the UAV stands still.


17 System Integration Although the UAV used in this study is mainly made of non-ferrous materials, the electric current that drives motors produces an unwanted magnetic field. At 0.92 m distance as used in field tests, the motor effect is negligible up to 9 A.

18 Field Studies Test Plan and Setup to Understand Potential Interference on Magnetic Field of Two Rocks (or Localization of Two Rocks)
19 Field Studies Test Procedure to Understand Potential Interference on the Magnetic Field of Two Rocks Measure the Earth magnetic field at one point when it can be assumed to be constant in a small test area. Deploy Magnet 1 (two stacked N42) at Point (0,0,0) with S direction pointing to y positive axis, and measure the magnetic field at Point (1,0,0), (2,0,0), and (3,0,0). Deploy Magnet 2 (two stacked N42) at Point (2,0,0), (4,0,0) and (6,0,0), respectively, and measure the corresponding magnetic field at Point (1,0,0), (2,0,0), and (3,0,0). Remove Magnet 2, and measure the magnetic intensity at all points. Deploy Magnet 2 at Point (D,0,0) with S direction pointing to y positive axis, and measure the magnetic intensity with D=2m, 3m, 4m, respectively.
20 Field Studies Preliminary Test Results Magnetic field interference is negligible when two magnets are placed at 3 m apart. Total intensity by two magnets (nt) Symmetric H=2 m H=3 m H=4 m H=5 m D=3 m 5000 M1 M Distance between two magnets (m)
21 Field Studies Localization Algorithm for a Single Magnet y P (x i,y i,z i ) Magnetic Intensity of the Earth: B E 3 2 k is a constant. 3 sin cos z o x B can also be measured with a 3-axis magnetometer. By minimizing the prediction error of the total magnetic field, the rock position can be determined. Magnetic Intensity of a Magnet: B m,,


 schematic view (b) Inner structure (c)")
22 Field Studies Smart Rock Design Based on Flow Velocity Gravity-controlled magnet polarization direction to minimize the influence of steel rebar in bridge piers Spherical encasement to make it easy to roll to the bottom of a scour hole (a) schematic view (b) Inner structure (c) Fabricated Smart Rock



23 Field Studies Smart Rock Deployment and Measurement at Pier 7 of the Roubidoux Creek Bridge (I-44W) Deployment of Smart Rock

24 Field Studies Magnetic Field Measurement with a UAV
25 Field Studies Rock Localization Accuracy Crane vs. UAV Based Tests Monitoring Method Date Predicted Coordinate Measured Coordinate Error (m) X m Y m Z m X m Y m Z m CRANE 11/6/ CRANE 4/14/ CRANE 10/20/ UAV 1/24/ UAV 5/10/

26 Field Studies Smart Rock Movement over Time Upstream Pier 7 3 rd 1 st 2 nd 4 th 5 th Smart Rock
27 Concluding Remarks The smart rock deployed at the Roubidoux Creek Bridge was located satisfactorily. Both the conventional crane -based and the proposed UAV-based test methods give a prediction error of less than 0.5 m. The UAV-based test method can rapidly collect a dense array of magnetic field intensity at a bridge site. The large data set can potentially improve the accuracy of smart rock localization and movement prediction. The magnetic field interference of two smart rocks appears negligible when placed at 3 m apart. Future study will be directed to refine the understanding on the potential interference of two or more smart rocks in magnetic field measurement and rock positioning algorithm.
28 Acknowledgement Financial support for this INSPIRE UTC project is provided by the U.S. Department of Transportation, Office of the Assistant Secretary for Research and Technology (USDOT/OST-R) under Grant No. 69A through INSPIRE University Transportation Center ( at Missouri University of Science and Technology. The views, opinions, findings and conclusions reflected in this publication are solely those of the authors and do not represent the official policy or position of the USDOT/OST-R, or any State or other entity. Thanks are due to Missouri Department of Transportation for making the bridge available for field study. Thanks are also due to MinerFly team at Missouri S&T for building UAVs and integrating measurement devices with them on behalf of the INSPIRE UTC.
SMART ROCK TECHNOLOGY FOR REAL-TIME MONITORING
 SMART ROCK TECHNOLOGY FOR REAL-TIME MONITORING OF BRIDGE SCOUR AND RIPRAP EFFECTIVENESS GUIDELINES AND VISUALIZATION TOOLS Genda Chen, P.E., Ph.D., F.ASCE, F.SEI Professor and Robert W. Abbett Distinguished
SMART ROCK TECHNOLOGY FOR REAL-TIME MONITORING OF BRIDGE SCOUR AND RIPRAP EFFECTIVENESS GUIDELINES AND VISUALIZATION TOOLS Genda Chen, P.E., Ph.D., F.ASCE, F.SEI Professor and Robert W. Abbett Distinguished
Contract No: OASRTRS-14-H-MST (Missouri University of Science and Technology)
") Smart Rock Technology for Real-time Monitoring of Bridge Scour and Riprap Effectiveness Design Guidelines and Visualization Tools (Progress Report No. 7) Contract No: OASRTRS-14-H-MST (Missouri University
Smart Rock Technology for Real-time Monitoring of Bridge Scour and Riprap Effectiveness Design Guidelines and Visualization Tools (Progress Report No. 7) Contract No: OASRTRS-14-H-MST (Missouri University
Contract No: OASRTRS-14-H-MST (Missouri University of Science and Technology)
") Smart Rock Technology for Real-time Monitoring of Bridge Scour and Riprap Effectiveness Design Guidelines and Visualization Tools (Progress Report No. 3) Contract No: OASRTRS-14-H-MST (Missouri University
Smart Rock Technology for Real-time Monitoring of Bridge Scour and Riprap Effectiveness Design Guidelines and Visualization Tools (Progress Report No. 3) Contract No: OASRTRS-14-H-MST (Missouri University
SMART ROCK TECHNOLOGY FOR REAL-TIME MONITORING OF BRIDGE SCOUR GUIDELINES AND VISUALIZATION AND RIPRAP EFFECTIVENESS
 SMART ROCK TECHNOLOGY FOR REAL-TIME MONITORING OF BRIDGE SCOUR AND RIPRAP EFFECTIVENESS GUIDELINES AND VISUALIZATION Genda Chen, P.E., Ph.D., F.ASCE, F.SEI Professor and Abbett Distinguished Chair in Civil
SMART ROCK TECHNOLOGY FOR REAL-TIME MONITORING OF BRIDGE SCOUR AND RIPRAP EFFECTIVENESS GUIDELINES AND VISUALIZATION Genda Chen, P.E., Ph.D., F.ASCE, F.SEI Professor and Abbett Distinguished Chair in Civil
Contract No: OASRTRS-14-H-MST (Missouri University of Science and Technology)
") Smart Rock Technology for Real-time Monitoring of Bridge Scour and Riprap Effectiveness Design Guidelines and Visualization Tools (Progress Report No. 2) Contract No: OASRTRS-14-H-MST (Missouri University
Smart Rock Technology for Real-time Monitoring of Bridge Scour and Riprap Effectiveness Design Guidelines and Visualization Tools (Progress Report No. 2) Contract No: OASRTRS-14-H-MST (Missouri University
Smart Rocks and Wireless Communication Systems for Real-Time Monitoring and Mitigation of Bridge Scour (Progress Report No. 4)
") Smart Rocks and Wireless Communication Systems for Real-Time Monitoring and Mitigation of Bridge Scour (Progress Report No. 4) Contract No: RITARS-11-H-MST (Missouri University of Science and Technology)
Smart Rocks and Wireless Communication Systems for Real-Time Monitoring and Mitigation of Bridge Scour (Progress Report No. 4) Contract No: RITARS-11-H-MST (Missouri University of Science and Technology)
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Available online at ScienceDirect. Procedia CIRP 33 (2015 )
") Available online at www.sciencedirect.com ScienceDirect Procedia CIRP 33 (2015 ) 581 586 9th CIRP Conference on Intelligent Computation in Manufacturing Engineering - CIRP ICME '14 Magnetic fluid seal
Available online at www.sciencedirect.com ScienceDirect Procedia CIRP 33 (2015 ) 581 586 9th CIRP Conference on Intelligent Computation in Manufacturing Engineering - CIRP ICME '14 Magnetic fluid seal
Small UAV A French MoD perspective and planning
 Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Smart Rocks and Wireless Communication Systems for Real- Time Monitoring and Mitigation of Bridge Scour (Progress Report No. 3)
") Smart Rocks and Wireless Communication Systems for Real- Time Monitoring and Mitigation of Bridge Scour (Progress Report No. 3) Contract No: RITARS-11-H-MST (Missouri University of Science and Technology)
Smart Rocks and Wireless Communication Systems for Real- Time Monitoring and Mitigation of Bridge Scour (Progress Report No. 3) Contract No: RITARS-11-H-MST (Missouri University of Science and Technology)
Palamede, more than a microsatellite. Workshop on University Micro Satellites in Italy Rome, July 27, 2005
 Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Palamede, more than a microsatellite The Palamede Team (represented by Franco Bernelli and Roberto Armellin) Workshop on University Micro Satellites in Italy Rome, July 27, 2005 Outline Mission and educational
Prototyping Collision Avoidance for suas
 Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
THE PROTEAN AND POC-MAST DESIGN
 THE PROTEAN AND POC-MAST DESIGN Contents 1. The changing landscape of generation for power transmission and distribution. 2. The Holford rules and recommendations for OHL routing and design. 3. The current
THE PROTEAN AND POC-MAST DESIGN Contents 1. The changing landscape of generation for power transmission and distribution. 2. The Holford rules and recommendations for OHL routing and design. 3. The current
Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation
 Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation A cooperative study between the Lower Brule Sioux Tribe s Environmental Protection Office and the U.S. Geological Survey, with assistance
Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation A cooperative study between the Lower Brule Sioux Tribe s Environmental Protection Office and the U.S. Geological Survey, with assistance
Research on the Parallelism Detection Between Nozzle and Floating Plate
 International Conference on Education Management Computer Society EMCS 2016 Research on the Parallelism Detection Between Nozzle Floating Plate HuangBin* WangXiaomeng e-mail: ahhb7310168@163.com * Corresponding
International Conference on Education Management Computer Society EMCS 2016 Research on the Parallelism Detection Between Nozzle Floating Plate HuangBin* WangXiaomeng e-mail: ahhb7310168@163.com * Corresponding
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon
 1 Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori Nagata, Masashi Koyama (The
1 Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori Nagata, Masashi Koyama (The
Seventh Framework Programme THEME: AAT Breakthrough and emerging technologies Call: FP7-AAT-2012-RTD-L0 AGEN
 Seventh Framework Programme THEME: AAT.2012.6.3-1. Breakthrough and emerging technologies Call: FP7-AAT-2012-RTD-L0 AGEN Atomic Gyroscope for Enhanced Navigation Grant agreement no.: 322466 Publishable
Seventh Framework Programme THEME: AAT.2012.6.3-1. Breakthrough and emerging technologies Call: FP7-AAT-2012-RTD-L0 AGEN Atomic Gyroscope for Enhanced Navigation Grant agreement no.: 322466 Publishable
Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles
 Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles Stuart Boland Derek Keen 1 Justin Nelson Brian Taylor Nick Wagner Dr. Thomas Bradley 47 th AIAA/ASME/SAE/ASEE JPC Outline
Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles Stuart Boland Derek Keen 1 Justin Nelson Brian Taylor Nick Wagner Dr. Thomas Bradley 47 th AIAA/ASME/SAE/ASEE JPC Outline
THE ULTIMATE DRONE SOLUTION
 THE ULTIMATE DRONE SOLUTION LX-1 ECHELON LiDAR MULTIROTOR Brochure & Technical Specifications OVERVIEW The LX-1 Echelon is a professional-grade hexacopter equipped with a LiDAR sensing payload, and designed
THE ULTIMATE DRONE SOLUTION LX-1 ECHELON LiDAR MULTIROTOR Brochure & Technical Specifications OVERVIEW The LX-1 Echelon is a professional-grade hexacopter equipped with a LiDAR sensing payload, and designed
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials. Ripley Valley Rural Fire Brigade - August 2010
 Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
Design and Simulation of New Versions of Tube Launched UAV
 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications
 Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
UNDERWATER SOLUTIONS WORLDWIDE
 UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
UNCLASSIFIED FY 2017 OCO. FY 2017 Base
 Exhibit R-2, RDT&E Budget Item Justification: PB 2017 Air Force Date: February 2016 3600: Research, Development, Test & Evaluation, Air Force / BA 2: Applied Research COST ($ in Millions) Prior Years FY
Exhibit R-2, RDT&E Budget Item Justification: PB 2017 Air Force Date: February 2016 3600: Research, Development, Test & Evaluation, Air Force / BA 2: Applied Research COST ($ in Millions) Prior Years FY
The 22M Class Aerostat: Increased Capabilities for the Small Tethered Aerostat Surveillance System
 11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, including the AIA 20-22 September 2011, Virginia Beach, VA AIAA 2011-7069 The 22M Class Aerostat: Increased Capabilities for
11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, including the AIA 20-22 September 2011, Virginia Beach, VA AIAA 2011-7069 The 22M Class Aerostat: Increased Capabilities for
Continuing Research and Development of Linac and Final Doublet Girder Movers
 Continuing Research and Development of Linac and Final Doublet Girder Movers Classification: Accelerator Science Institution and Personnel requesting funding: Colorado State University David W. Warner,
Continuing Research and Development of Linac and Final Doublet Girder Movers Classification: Accelerator Science Institution and Personnel requesting funding: Colorado State University David W. Warner,
IJESRT. Scientific Journal Impact Factor: (ISRA), Impact Factor: 2.114
, Impact Factor: 2.114") IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY SIMULATION AND VIBRATION ANALYSIS OF GEAR BOX USED IN COOLING TOWER FAN K.G.Patel*, S.U.Patil, H.G.Patil D.N.Patel College of
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY SIMULATION AND VIBRATION ANALYSIS OF GEAR BOX USED IN COOLING TOWER FAN K.G.Patel*, S.U.Patil, H.G.Patil D.N.Patel College of
Optimization of PID Parameters of Hydraulic System of Elevating Wheelchair Based on AMESim Hui Cao a*, Hui Guo b
 Available online at www.sciencedirect.com Procedia Engineering 15 (2011) 3710 3714 Advanced in Control Engineering and Information Science Optimization of PID Parameters of Hydraulic System of Elevating
Available online at www.sciencedirect.com Procedia Engineering 15 (2011) 3710 3714 Advanced in Control Engineering and Information Science Optimization of PID Parameters of Hydraulic System of Elevating
Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket
 AIAA ADS Conference 2011 in Dublin 1 Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki
AIAA ADS Conference 2011 in Dublin 1 Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki
Research on Lubricant Leakage in Spiral Groove Bearing
 TECHNICAL REPORT Research on Lubricant Leakage in Spiral Groove Bearing T. OGIMOTO T. TAKAHASHI In recent years, bearings for spindle motors have been required for high-speed rotation with high accuracy
TECHNICAL REPORT Research on Lubricant Leakage in Spiral Groove Bearing T. OGIMOTO T. TAKAHASHI In recent years, bearings for spindle motors have been required for high-speed rotation with high accuracy
Aerodynamic Investigation of Cable-stayed Bridge with 2-edge Girder
 Takuya Murakami*, Katsuaki Takeda**, Michiaki Takao*** and Rokusui Yui**** * Senior Research Engineer, Civil & Building Research Dept. Applied Technology Research Center ** Chief, Civil & Building Research
Takuya Murakami*, Katsuaki Takeda**, Michiaki Takao*** and Rokusui Yui**** * Senior Research Engineer, Civil & Building Research Dept. Applied Technology Research Center ** Chief, Civil & Building Research
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
Development of a Variable Stability, Modular UAV Airframe for Local Research Purposes
 Development of a Variable Stability, Modular UAV Airframe for Local Research Purposes John Monk Principal Engineer CSIR, South Africa 28 October 2008 Outline A Brief History of UAV Developments at the
Development of a Variable Stability, Modular UAV Airframe for Local Research Purposes John Monk Principal Engineer CSIR, South Africa 28 October 2008 Outline A Brief History of UAV Developments at the
BROCHURE. End-to-end microgrid solutions From consulting and advisory services to design and implementation
 BROCHURE End-to-end microgrid solutions From consulting and advisory services to design and implementation 2 B R O C H U R E E N D -TO - E N D M I C R O G R I D S O LU T I O N S Global trends in grid transformation
BROCHURE End-to-end microgrid solutions From consulting and advisory services to design and implementation 2 B R O C H U R E E N D -TO - E N D M I C R O G R I D S O LU T I O N S Global trends in grid transformation
Proposal to establish a laboratory for combustion studies
 Proposal to establish a laboratory for combustion studies Jayr de Amorim Filho Brazilian Bioethanol Science and Technology Laboratory SCRE Single Cylinder Research Engine Laboratory OUTLINE Requirements,
Proposal to establish a laboratory for combustion studies Jayr de Amorim Filho Brazilian Bioethanol Science and Technology Laboratory SCRE Single Cylinder Research Engine Laboratory OUTLINE Requirements,
Performance Based Design for Bridge Piers Impacted by Heavy Trucks
 Performance Based Design for Bridge Piers Impacted by Heavy Trucks Anil K. Agrawal, Ph.D., P.E., Ran Cao and Xiaochen Xu The City College of New York, New York, NY Sherif El-Tawil, Ph.D. University of
Performance Based Design for Bridge Piers Impacted by Heavy Trucks Anil K. Agrawal, Ph.D., P.E., Ran Cao and Xiaochen Xu The City College of New York, New York, NY Sherif El-Tawil, Ph.D. University of
Design and construction a flying wing unmanned aerial vehicles
 Design and construction a flying wing unmanned aerial vehicles Vasile Prisacariu 1, Mircea Boscoianu 2 SUMMARY: Unmanned aerial vehicles (UAV) are starting to represent a larger importance in the aerospace
Design and construction a flying wing unmanned aerial vehicles Vasile Prisacariu 1, Mircea Boscoianu 2 SUMMARY: Unmanned aerial vehicles (UAV) are starting to represent a larger importance in the aerospace
Austrian Show Case Disaster Relief. Diamond Aircraft, Hanoi February DAI-Marketing/Mandl
 Austrian Show Case Disaster Relief Diamond Aircraft, Hanoi 20 21 February 2012 Multiple requirements Multi Purpose Platform 1. Company Movie 2. Company presentation 3. Disaster relief 4. Security 5. One-stop
Austrian Show Case Disaster Relief Diamond Aircraft, Hanoi 20 21 February 2012 Multiple requirements Multi Purpose Platform 1. Company Movie 2. Company presentation 3. Disaster relief 4. Security 5. One-stop
Design, Fabrication and Testing of an Unmanned Aerial Vehicle Catapult Launcher
 ISBN 978-93-84422-40-0 Proceedings of 2015 International Conference on Computing Techniques and Mechanical Engineering (ICCTME 2015) Phuket, October 1-3, 2015, pp. 47-53 Design, Fabrication and Testing
ISBN 978-93-84422-40-0 Proceedings of 2015 International Conference on Computing Techniques and Mechanical Engineering (ICCTME 2015) Phuket, October 1-3, 2015, pp. 47-53 Design, Fabrication and Testing
Wireless Networks. Series Editor Xuemin Sherman Shen University of Waterloo Waterloo, Ontario, Canada
 Wireless Networks Series Editor Xuemin Sherman Shen University of Waterloo Waterloo, Ontario, Canada More information about this series at http://www.springer.com/series/14180 Miao Wang Ran Zhang Xuemin
Wireless Networks Series Editor Xuemin Sherman Shen University of Waterloo Waterloo, Ontario, Canada More information about this series at http://www.springer.com/series/14180 Miao Wang Ran Zhang Xuemin
UAV Magnetometry for Mineral Exploration
 UAV Magnetometry for Mineral Exploration Case Study: Île Calumet, QC JC Ricard, CEO Devbrio Géophysique C. Mercier, Jr. Eng. J. Blanchard, M.Sc. Geophysics Devbrio UAV magnetometer 1 Developed by Devbrio
UAV Magnetometry for Mineral Exploration Case Study: Île Calumet, QC JC Ricard, CEO Devbrio Géophysique C. Mercier, Jr. Eng. J. Blanchard, M.Sc. Geophysics Devbrio UAV magnetometer 1 Developed by Devbrio
Key Parameters Investigation on Small Cycle Fuel Injection Quantity for a Diesel Engine Electronic Unit Pump System
 Page63 EVS25 Shenzhen, China, Nov 5-9, 21 Key Parameters Investigation on Small Cycle Fuel Injection Quantity for a Diesel Engine Electronic Unit Pump System Abstract Liyun Fan 1, Bingqi Tian 1, and Xiuzhen
Page63 EVS25 Shenzhen, China, Nov 5-9, 21 Key Parameters Investigation on Small Cycle Fuel Injection Quantity for a Diesel Engine Electronic Unit Pump System Abstract Liyun Fan 1, Bingqi Tian 1, and Xiuzhen
ONLINE NON-CONTACT TORSION SENSING METHOD USING FIBER BRAGG GRATING SENSORS AND OPTICAL COUPLING METHOD. Yoha Hwang and Jong Min Lee
 ICSV14 Cairns Australia 9-1 July, 007 ONLINE NON-CONTACT TORSION SENSING METHOD USING FIBER BRAGG GRATING SENSORS AND OPTICAL COUPLING METHOD Yoha Hwang and Jong Min Lee Intelligent System Research Division,
ICSV14 Cairns Australia 9-1 July, 007 ONLINE NON-CONTACT TORSION SENSING METHOD USING FIBER BRAGG GRATING SENSORS AND OPTICAL COUPLING METHOD Yoha Hwang and Jong Min Lee Intelligent System Research Division,
Segway with Human Control and Wireless Control
 Review Paper Abstract Research Journal of Engineering Sciences E- ISSN 2278 9472 Segway with Human Control and Wireless Control Sanjay Kumar* and Manisha Sharma and Sourabh Yadav Dept. of Electronics &
Review Paper Abstract Research Journal of Engineering Sciences E- ISSN 2278 9472 Segway with Human Control and Wireless Control Sanjay Kumar* and Manisha Sharma and Sourabh Yadav Dept. of Electronics &
Robofish Charging Station (RCS) Test Plan
 Test Plan") Team P17250 10/26/2016 Rev A Robofish Charging Station (RCS) Test Plan 1 Table of Contents 1. Objectives 2. Test Criteria 3. Test Resources 4. Test Procedures 5. Results 6. Conclusions 1. Objectives 1.1.
Team P17250 10/26/2016 Rev A Robofish Charging Station (RCS) Test Plan 1 Table of Contents 1. Objectives 2. Test Criteria 3. Test Resources 4. Test Procedures 5. Results 6. Conclusions 1. Objectives 1.1.
UAV Fuel Cell Module. Fly. Longer. Fly. Further. Achieve More
 UAV Fuel Cell Module Fly Longer Fly Further Achieve More The use of professional Unmanned Aerial Vehicles (UAVs) has grown significantly in recent years. Owing to the constraints of traditional battery
UAV Fuel Cell Module Fly Longer Fly Further Achieve More The use of professional Unmanned Aerial Vehicles (UAVs) has grown significantly in recent years. Owing to the constraints of traditional battery
Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon
 , Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
, Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
UNC-Charlotte's Power Engineering Teaching lab
 1 UNC-Charlotte's Power Engineering Teaching lab B. Chowdhury Panel Session Title: Existing and Proposed Power Systems Laboratories for the Undergraduate Curriculum PES GM 2015 2 Outline Background - Energy
1 UNC-Charlotte's Power Engineering Teaching lab B. Chowdhury Panel Session Title: Existing and Proposed Power Systems Laboratories for the Undergraduate Curriculum PES GM 2015 2 Outline Background - Energy
Long-Range Rovers for Mars Exploration and Sample Return
 2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
DESIGN AND DEVELOPMENT OF A MICRO AIR VEHICLE (µav) CONCEPT: PROJECT BIDULE
 CONCEPT: PROJECT BIDULE") DESIGN AND DEVELOPMENT OF A MICRO AIR VEHIE (µav) CONCEPT: PROJECT BIDULE Mr T. Spoerry, Dr K.C. Wong School of Aerospace, Mechanical and Mechatronic Engineering University of Sydney NSW 6 Abstract This
DESIGN AND DEVELOPMENT OF A MICRO AIR VEHIE (µav) CONCEPT: PROJECT BIDULE Mr T. Spoerry, Dr K.C. Wong School of Aerospace, Mechanical and Mechatronic Engineering University of Sydney NSW 6 Abstract This
ABB MEASUREMENT & ANALYTICS. Predictive Emission Monitoring Systems The new approach for monitoring emissions from industry
 ABB MEASUREMENT & ANALYTICS Predictive Emission Monitoring Systems The new approach for monitoring emissions from industry 2 P R E D I C T I V E E M I S S I O N M O N I T O R I N G S Y S T E M S M O N
ABB MEASUREMENT & ANALYTICS Predictive Emission Monitoring Systems The new approach for monitoring emissions from industry 2 P R E D I C T I V E E M I S S I O N M O N I T O R I N G S Y S T E M S M O N
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Study Report. McCredie-Overton Transmission Line Right-of-Way Analysis. City of Columbia, Missouri. prepared for the (S49)
") Study Report McCredie-Overton Transmission Line Right-of-Way Analysis prepared for the City of Columbia, Missouri (S49) May, 2017 S49 McCredie-Overton Transmission Line Right-of-Way Study Report Table
Study Report McCredie-Overton Transmission Line Right-of-Way Analysis prepared for the City of Columbia, Missouri (S49) May, 2017 S49 McCredie-Overton Transmission Line Right-of-Way Study Report Table
REU: Improving Straight Line Travel in a Miniature Wheeled Robot
 THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
Design of SPARUS II AUV
 Design of SPARUS II AUV Underwater Robotics Research Centre (CIRS) Computer Vision and Robotics Institute Universitat de Girona, 17003, Girona, Spain. web: http://cirs.udg.edu Contact person: Marc Carreras
Design of SPARUS II AUV Underwater Robotics Research Centre (CIRS) Computer Vision and Robotics Institute Universitat de Girona, 17003, Girona, Spain. web: http://cirs.udg.edu Contact person: Marc Carreras
The Electricity and Transportation Infrastructure Convergence Using Electrical Vehicles
 The Electricity and Transportation Infrastructure Convergence Using Electrical Vehicles Final Project Report Power Systems Engineering Research Center Empowering Minds to Engineer the Future Electric Energy
The Electricity and Transportation Infrastructure Convergence Using Electrical Vehicles Final Project Report Power Systems Engineering Research Center Empowering Minds to Engineer the Future Electric Energy
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July ISSN BY B.MADHAN KUMAR
 International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 485 FLYING HOVER BIKE, A SMALL AERIAL VEHICLE FOR COMMERCIAL OR. SURVEYING PURPOSES BY B.MADHAN KUMAR Department
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 485 FLYING HOVER BIKE, A SMALL AERIAL VEHICLE FOR COMMERCIAL OR. SURVEYING PURPOSES BY B.MADHAN KUMAR Department
STABILIZATION OF ISLANDING PEA MICRO GRID BY PEVS CHARGING CONTROL
 STABILIZATION OF ISLANDING PEA MICRO GRID BY PEVS CHARGING CONTROL Montree SENGNONGBAN Komsan HONGESOMBUT Sanchai DECHANUPAPRITTHA Provincial Electricity Authority Kasetsart University Kasetsart University
STABILIZATION OF ISLANDING PEA MICRO GRID BY PEVS CHARGING CONTROL Montree SENGNONGBAN Komsan HONGESOMBUT Sanchai DECHANUPAPRITTHA Provincial Electricity Authority Kasetsart University Kasetsart University
UAV Fuel Cell Module. Fly. Longer. Fly. Further. Achieve More
 UAV Fuel Cell Module Fly Longer Fly Further Achieve More The use of professional Unmanned Aerial Vehicles (UAVs) has grown significantly in recent years. Owing to the constraints of traditional battery
UAV Fuel Cell Module Fly Longer Fly Further Achieve More The use of professional Unmanned Aerial Vehicles (UAVs) has grown significantly in recent years. Owing to the constraints of traditional battery
Modal Analysis of Automobile Brake Drum Based on ANSYS Workbench Dan Yang1, 2,Zhen Yu1, 2, Leilei Zhang1, a * and Wentao Cheng2
 7th International Conference on Mechatronics, Computer and Education Informationization (MCEI 2017) Modal Analysis of Automobile Brake Drum Based on ANSYS Workbench Dan Yang1, 2,Zhen Yu1, 2, Leilei Zhang1,
7th International Conference on Mechatronics, Computer and Education Informationization (MCEI 2017) Modal Analysis of Automobile Brake Drum Based on ANSYS Workbench Dan Yang1, 2,Zhen Yu1, 2, Leilei Zhang1,
Defence and Security Innovation
 Defence Defence and and Security Security Defence and Security Innovation Providing the power to detect, deceive, defend, defeat teledyne-e2v.com/rf Page 1 Introduction ABOUT US Founded in 1947, Teledyne
Defence Defence and and Security Security Defence and Security Innovation Providing the power to detect, deceive, defend, defeat teledyne-e2v.com/rf Page 1 Introduction ABOUT US Founded in 1947, Teledyne
D-25 Speed Advisory System
 Report Title Report Date: 2002 D-25 Speed Advisory System Principle Investigator Name Pesti, Geza Affiliation Texas Transportation Institute Address CE/TTI, Room 405-H 3135 TAMU College Station, TX 77843-3135
Report Title Report Date: 2002 D-25 Speed Advisory System Principle Investigator Name Pesti, Geza Affiliation Texas Transportation Institute Address CE/TTI, Room 405-H 3135 TAMU College Station, TX 77843-3135
Planetary Surface Transportation and Site Development
 Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
PHYSICAL MODEL TESTS OF ICE PASSAGE AT LOCKS
 Ice in the Environment: Proceedings of the 16th IAHR International Symposium on Ice Dunedin, New Zealand, 2nd 6th December 22 International Association of Hydraulic Engineering and Research PHYSICAL MODEL
Ice in the Environment: Proceedings of the 16th IAHR International Symposium on Ice Dunedin, New Zealand, 2nd 6th December 22 International Association of Hydraulic Engineering and Research PHYSICAL MODEL
AC : USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES
 AC 2011-2029: USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES Dr. Howard Medoff, Pennsylvania State University, Ogontz Campus Associate Professor of Engineering, Penn State Abington Research
AC 2011-2029: USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES Dr. Howard Medoff, Pennsylvania State University, Ogontz Campus Associate Professor of Engineering, Penn State Abington Research
Development of an unmanned aerial vehicle UAV for air quality measurements in urban areas
 Development of an unmanned aerial vehicle UAV for air quality measurements in urban areas Patrick Haas 1, Christophe Balistreri 2, Piero Pontelandolfo 2, Gilles Triscone 3 University of Applied Sciences
Development of an unmanned aerial vehicle UAV for air quality measurements in urban areas Patrick Haas 1, Christophe Balistreri 2, Piero Pontelandolfo 2, Gilles Triscone 3 University of Applied Sciences
Development of Rattle Noise Analysis Technology for Column Type Electric Power Steering Systems
 TECHNICAL REPORT Development of Rattle Noise Analysis Technology for Column Type Electric Power Steering Systems S. NISHIMURA S. ABE The backlash adjustment mechanism for reduction gears adopted in electric
TECHNICAL REPORT Development of Rattle Noise Analysis Technology for Column Type Electric Power Steering Systems S. NISHIMURA S. ABE The backlash adjustment mechanism for reduction gears adopted in electric
SMARTSat. Shape Memory Alloy Research Technology Satellite. Allison Barnard Alicia Broederdorf. Texas A&M University Space Engineering Institute
 SMARTSat Shape Memory Alloy Research Technology Satellite Allison Barnard Alicia Broederdorf Texas A&M University Space Engineering Institute Outline Introduction / Mission Objectives Systems Overview
SMARTSat Shape Memory Alloy Research Technology Satellite Allison Barnard Alicia Broederdorf Texas A&M University Space Engineering Institute Outline Introduction / Mission Objectives Systems Overview
A Small, Manned Aircraft as a Testbed for Radar Sensor Development
 A Small, Manned Aircraft as a Testbed for Radar Sensor Development Matthew C. Edwards a, Evan C. Zaugg, a, David G. Long a, Richard Christiansen a and Alex Margulis b a Brigham Young University, 459 CB,
A Small, Manned Aircraft as a Testbed for Radar Sensor Development Matthew C. Edwards a, Evan C. Zaugg, a, David G. Long a, Richard Christiansen a and Alex Margulis b a Brigham Young University, 459 CB,
Non-contact Deflection Measurement at High Speed
 Non-contact Deflection Measurement at High Speed S.Rasmussen Delft University of Technology Department of Civil Engineering Stevinweg 1 NL-2628 CN Delft The Netherlands J.A.Krarup Greenwood Engineering
Non-contact Deflection Measurement at High Speed S.Rasmussen Delft University of Technology Department of Civil Engineering Stevinweg 1 NL-2628 CN Delft The Netherlands J.A.Krarup Greenwood Engineering
Small Generator Interconnection Program Interconnection Technical Requirements
 General Program Information What is the purpose of the PGE Small Generator Interconnection Program? How do I initiate a distribution interconnection request for my project? The purpose of our Small Generator
General Program Information What is the purpose of the PGE Small Generator Interconnection Program? How do I initiate a distribution interconnection request for my project? The purpose of our Small Generator
Design and Navigation of Flying Robots
 Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Structure Parameters Optimization Analysis of Hydraulic Hammer System *
 Modern Mechanical Engineering, 2012, 2, 137-142 http://dx.doi.org/10.4236/mme.2012.24018 Published Online November 2012 (http://www.scirp.org/journal/mme) Structure Parameters Optimization Analysis of
Modern Mechanical Engineering, 2012, 2, 137-142 http://dx.doi.org/10.4236/mme.2012.24018 Published Online November 2012 (http://www.scirp.org/journal/mme) Structure Parameters Optimization Analysis of
Over-Snow Rovers for Polar Science Campaigns
 Over-Snow Rovers for Polar Science Campaigns J.H. Lever 1, L.E. Ray 2, A.M. Morlock 2, A.M. Burzynski 1, R.M. Williams 2 1 Cold Regions Research and Engineering Laboratory, Hanover, NH 2 Thayer School
Over-Snow Rovers for Polar Science Campaigns J.H. Lever 1, L.E. Ray 2, A.M. Morlock 2, A.M. Burzynski 1, R.M. Williams 2 1 Cold Regions Research and Engineering Laboratory, Hanover, NH 2 Thayer School
Improvements for Ver November 23, 2017
 Dyrobes Rotordynamics Software dyrobes.com Improvements for Ver 20.00 November 23, 2017 Add new features in BePerf for fixed-lobe and tilting pad journal bearing design: 1) Parametric study 2) Design Comparison.
Dyrobes Rotordynamics Software dyrobes.com Improvements for Ver 20.00 November 23, 2017 Add new features in BePerf for fixed-lobe and tilting pad journal bearing design: 1) Parametric study 2) Design Comparison.
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Measurement made easy. Predictive Emission Monitoring Systems The new approach for monitoring emissions from industry
 Measurement made easy Predictive Emission Monitoring Systems The new approach for monitoring emissions from industry ABB s Predictive Emission Monitoring Systems (PEMS) Experts in emission monitoring ABB
Measurement made easy Predictive Emission Monitoring Systems The new approach for monitoring emissions from industry ABB s Predictive Emission Monitoring Systems (PEMS) Experts in emission monitoring ABB
CAV2001:sessionA
 CAV2001:sessionA9.006 1 CAVITATION CHARACTERISTICS OF RESTRICTION ORIFICES (Experiment for Shock ressure Distribution by Cavitation on Restriction s and Occurrence of Cavitation at Multiperforated s due
CAV2001:sessionA9.006 1 CAVITATION CHARACTERISTICS OF RESTRICTION ORIFICES (Experiment for Shock ressure Distribution by Cavitation on Restriction s and Occurrence of Cavitation at Multiperforated s due
Special edition paper
 Countermeasures of Noise Reduction for Shinkansen Electric-Current Collecting System and Lower Parts of Cars Kaoru Murata*, Toshikazu Sato* and Koichi Sasaki* Shinkansen noise can be broadly classified
Countermeasures of Noise Reduction for Shinkansen Electric-Current Collecting System and Lower Parts of Cars Kaoru Murata*, Toshikazu Sato* and Koichi Sasaki* Shinkansen noise can be broadly classified
Experimental Study on the Effects of Flow Rate and Temperature on Thermoelectric Power Generation
 PROCEEDINGS, 44th Workshop on Geothermal Reservoir Engineering Stanford University, Stanford, California, February 11-13, 19 SGP-TR-214 Experimental Study on the Effects of Flow Rate and Temperature on
PROCEEDINGS, 44th Workshop on Geothermal Reservoir Engineering Stanford University, Stanford, California, February 11-13, 19 SGP-TR-214 Experimental Study on the Effects of Flow Rate and Temperature on
Review and Proposal of Exhaust gas operated air brake system for automobile
 Review and Proposal of Exhaust gas operated air brake system for automobile Shriram Pawar 1, Praful Rote 2, Pathan Sahil, Mohd Sayed 4 1 BE student Mechanical, SND COE & RC, YEOLA, Maharashtra,India 2
Review and Proposal of Exhaust gas operated air brake system for automobile Shriram Pawar 1, Praful Rote 2, Pathan Sahil, Mohd Sayed 4 1 BE student Mechanical, SND COE & RC, YEOLA, Maharashtra,India 2
How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]
![How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]](/thumbs/89/99262679.jpg "How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]") 1! How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution] !2 How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) Introduction Terminology
1! How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution] !2 How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) Introduction Terminology
Planetary Roller Type Traction Drive Unit for Printing Machine
 TECHNICAL REPORT Planetary Roller Type Traction Drive Unit for Printing Machine A. KAWANO This paper describes the issues including the rotation unevenness, transmission torque and service life which should
TECHNICAL REPORT Planetary Roller Type Traction Drive Unit for Printing Machine A. KAWANO This paper describes the issues including the rotation unevenness, transmission torque and service life which should
Smart Grid Reliability Research
 Smart Grid Reliability Research October 12, 2011 Research & Technology Management Joe Schatz Transmission Reliability Thoughts Consider BAU, but continue investigation of SVCs, synch condensers, UVLS Modeling
Smart Grid Reliability Research October 12, 2011 Research & Technology Management Joe Schatz Transmission Reliability Thoughts Consider BAU, but continue investigation of SVCs, synch condensers, UVLS Modeling
Enhancing Wheelchair Mobility Through Dynamics Mimicking
 Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
A Prototype of a Stair-Climbing System for a Wheelchair
 A Prototype of a Stair-Climbing System for a Wheelchair Ekachai Chaichanasiri* and Teerapol Puangumpan Department of Mechanical Engineering, Faculty of Engineering, Mahidol University, Nakornpathom, Thailand
A Prototype of a Stair-Climbing System for a Wheelchair Ekachai Chaichanasiri* and Teerapol Puangumpan Department of Mechanical Engineering, Faculty of Engineering, Mahidol University, Nakornpathom, Thailand
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Length Height Rotor Diameter Tail Rotor Diameter..12. Tail Boom Length Width
 2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
Design Development and Testing of the Ground Renewable Expeditionary ENergy System
 Design Development and Testing of the Ground Renewable Expeditionary ENergy System Eric Shields, Alex Askari NSWC Carderock, 5/4/2011 1 Battery Technology Group Three Primary Work Areas Lithium Battery
Design Development and Testing of the Ground Renewable Expeditionary ENergy System Eric Shields, Alex Askari NSWC Carderock, 5/4/2011 1 Battery Technology Group Three Primary Work Areas Lithium Battery
Balancing and over-speed testing of flexible rotors
 Balancing and over-speed testing of flexible rotors Installations for low- and high-speed balancing and for over-speed testing HS 16 - HS 34 Application Balancing of flexible rotors from turbo-machinery
Balancing and over-speed testing of flexible rotors Installations for low- and high-speed balancing and for over-speed testing HS 16 - HS 34 Application Balancing of flexible rotors from turbo-machinery
Experimental Study on Flutter Performance of a 1700m Long Truss Girder Suspension Bridge
 Experimental Study on Flutter Performance of a 1700m Long Truss Girder Suspension Bridge *Yanguo Sun 1), Haili Liao 2) and Mingshui Li 3) 1), 2), 3) Research Centre for Wind Eng., Southwest Jiaotong University,
Experimental Study on Flutter Performance of a 1700m Long Truss Girder Suspension Bridge *Yanguo Sun 1), Haili Liao 2) and Mingshui Li 3) 1), 2), 3) Research Centre for Wind Eng., Southwest Jiaotong University,
Torque Analysis of Magnetic Spur Gear with Different Configurations
 International Journal of Electrical Engineering. ISSN 974-158 Volume 5, Number 7 (1), pp. 843-85 International Research Publication House http://www.irphouse.com Torque Analysis of Magnetic Spur Gear with
International Journal of Electrical Engineering. ISSN 974-158 Volume 5, Number 7 (1), pp. 843-85 International Research Publication House http://www.irphouse.com Torque Analysis of Magnetic Spur Gear with
TECHNICAL STRATEGIC CHOICE: POWER ELECTRONIC SYSTEMS AND APPLICATIONS
 POWER ELECTRONIC SYSTEMS AND APPLICATIONS FAULT DETECTION & MITIGATION GPS-BASED SMART RECLOSER DC CIRCUIT PROTECTION IMBALANCES IN 3- PHASE FEEDERS COMPENSATION TECHNIQUES SUB-SYNCHRONOUS RESONANCE MITIGATION
POWER ELECTRONIC SYSTEMS AND APPLICATIONS FAULT DETECTION & MITIGATION GPS-BASED SMART RECLOSER DC CIRCUIT PROTECTION IMBALANCES IN 3- PHASE FEEDERS COMPENSATION TECHNIQUES SUB-SYNCHRONOUS RESONANCE MITIGATION
BY HOEYCOMB AEROSPACE TECHNOLOGIES. HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV
 BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
An Automated System for the Acoustical and Aerodynamic Characterization of Small Air Moving Devices
 Minneapolis, Minnesota NOISE-CON 2005 2005 October 17-19 An Automated System for the Acoustical and Aerodynamic Characterization of Small Air Moving Devices Jeff G. Schmitt David A. Nelson John Phillips
Minneapolis, Minnesota NOISE-CON 2005 2005 October 17-19 An Automated System for the Acoustical and Aerodynamic Characterization of Small Air Moving Devices Jeff G. Schmitt David A. Nelson John Phillips
Muffler size minimization, using attenuation behaviour by acoustic simulation
 ISSN 2395-1621 size minimization, using attenuation behaviour by acoustic simulation #1 Sandeep K Kakade, #2 Prof.Dr.F.B.Sayyad #12 G S Moze College of Engineering, Pune, India ABSTRACT ARTICLE INFO Engine
ISSN 2395-1621 size minimization, using attenuation behaviour by acoustic simulation #1 Sandeep K Kakade, #2 Prof.Dr.F.B.Sayyad #12 G S Moze College of Engineering, Pune, India ABSTRACT ARTICLE INFO Engine