The Institution of Engineering and Technology Seminar on. Micro UAVs. Dr Tom Richardson University of Bristol. 20 th February 2007
|
|
|
- Baldwin Booker
- 5 years ago
- Views:
Transcription
1 The Institution of Engineering and Technology Seminar on Micro UAVs Dr Tom Richardson University of Bristol 20 th February 2007
2 Contact Information Address: Dr Tom Richardson Department of Aerospace Engineering Queens Building University Walk University of Bristol, BS8 1TR
3 MAV presentation - Contents Past MAV Definition Fixed, Flapping and Rotary Wing Commercial and Academic Development Present University of Bristol Fixed Wing Flapping Wing Future Competitions Key areas for development Limits to MAV development?
4 Past MAV Definition Fixed, Flapping and Rotary Wing Commercial and Academic Development
5 What is an MAV? UAV Unmanned or Uninhabited Air Vehicle UAS Unmanned Aircraft Systems MAV Micro Air Vehicle Micro!? Micro Air Vehicles - Toward a New Dimension in Flight 1997 (1) DARPA - Defence Advanced Research Projects Agency James M. McMichael, Program Manager DARPA, and Colonel Michael S. Francis, USAF (Ret.) formerly of Defense Airborne Reconnaissance Office MAV definition The definition employed in DARPA's program limits these craft to a size less than 15 cm (about 6 inches) in length, width or height.
6 Initial DARPA MAV Definitions from (1) MAVs are affordable, fully functional, militarily capable, small flight vehicles in a class of their own. MAVs can deploy a useful micro payload to a remote or otherwise hazardous location MAVs may perform any of a variety of missions, including reconnaissance and surveillance, targeting, tagging and biochemical sensing. Although the 15 cm limitation may appear somewhat arbitrary, it derives from both physics and technology considerations. The low Reynolds number regime is significant in that it projects a fundamental shift in physical behavior at MAV scales and speeds - an environment more common to the smallest birds and the largest insects.
7 Initial DARPA MAV Requirements from (1) The technology challenge to develop and integrate all the physical elements and components necessary to sustain this new dimension in flight will require an unprecedented level of multifunctionality among the system components. The MAV must trade favorably with other soldier assets - like water and ammunition. The system must also be affordable. For many missions it must be intrinsically covert.
8 MAV Requirements? 1st US-European MAV Competition September 2005 held in Germany: Limits Desired System mass < 500 g 150 g Maximum dimension < 500 mm 250 mm Endurance > 10 min 30 min Range > 0.5 km Noise level at 15m < 60 db 3rd US-European MAV Competition - MAV 07 ( Two challenging missions will be open to MAVs of which the maximum dimension is 500 mm and maximum weight is 500 grams. Technology Demonstrations open to mini-uavs under 1 meter and 2 kilograms will allow to demonstrate novel, cutting-edge technologies as applied to indoor and outdoor MAVs.


9 Fixed Wing University of Bristol fixed wing MAV Span of 350mm Root chord of 200mm Overall Mass of 267g Brushless Electric motor
 mechanism Professor Stuart Burgess Mechanical")
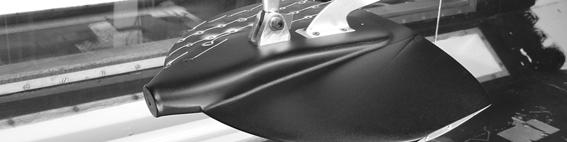
10 Flapping Wing University of Bristol flapping wing MAV Bio-inspired MAV design Parallel crank-rocker (PCR) mechanism Professor Stuart Burgess Mechanical Engineering, UoB

11 Rotary Wing The 60 mm rotor diameter Picoflyer is the smallest RC helicopter The Picoflyer had it's first flight on the 7 th August Petter Muren

12 Commercial MAV AeroVironment Early AeroVironment Prototype Growing interest in the early 1990s DARPA funded in 1996, AeroVironment performed a Phase I study, which concluded that a sixinch MAV was feasible In the spring of 1998, AeroVironment was awarded a Phase II SBIR contract, which resulted in Black Widow MAV AIAA Development of the Black Widow Micro Air Vehicle Joel M. Grasmeyer and Matthew T. Keennon

13 Commercial MAV AeroVironment Black Widow 4 year project 6-inch span (15cm), fixed-wing aircraft Flight speed of 30 mph Endurance of 30 minutes Communications range of 2 km The Black Widow featured an autopilot with altitude hold, airspeed hold, heading hold, and yaw damping. Electronic subsystems include a 2-gram camera, a 2-gram video downlink transmitter, and a 5-gram fully proportional radio control system with 0.5-gram actuators. Multidisciplinary Design Optimization with Genetic Algorithms

14 Commercial MAV AeroVironment Wasp Span of 41 cm 275 grams The Wasp is AeroVironment's smallest UAS. Wasp can be manually operated or programmed for GPS-based autonomous navigation. Entered Service with the US Marines 2005 / 2006 Forward- and Side-Look EO Cameras Range 2 km to 4 km Line-of-Sight Speed km/h Operating Altitude 50-1,000 ft AGL

 16.")

15 Academic involvement with MAVs Brigham Young University s MAGICC Lab was placed first in the MAV competition held at Eglin Air Force Base in Florida on October 28-31, 2006 Fully Autonomous BYU was able to see all three targets and positively identified two. Kestrel autopilot (KAP) grams Three-axis rate gyros and accelerometers for attitude estimation Autonomous Takeoff and Landing modes Multiple air vehicle support Autonomous Modes: Home, Loiter, Rally, Waypoint Navigation
16 Present University of Bristol Fixed Wing Flapping Wing
17 University of Bristol -MAV Tailored towards the US- European MAV Competitions Research elements from final year student projects COTS components Inverse Zimmerman planform t/c 28.13%c C M ¼ camber 37.44%c dc L /dα 0.1 C Lα stall incidence ~12 MH-64 aerofoil




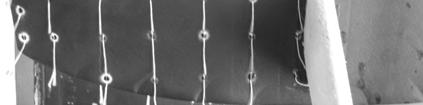



18 University of Bristol -MAV Click! Wind tunnel testing Lift & Drag measurements Flow Visualisation


19 University of Bristol -MAV Second MAV design CAD / CAM Rohacell foam Density 31 kg m -3 Autodesk Inventor Integral Avionics Bay Fibreglass covered Trailing edge control surfaces









20 University of Bristol -MAV Propeller Motor Motor Controller Power Cell GPS GUMSTIX Power Cell Servo Receiver Linkages
21 University of Bristol MAV Mass Breakdown Component Mass (g) Body 75 Linkage mechanisms 5 Servos 10 Airframe 90 (34%) Motor 44 Speed controller 14 Propeller 5 Propulsion 63 (24%) Lithium polymer cells 36 Power 36 (13%) GPS (integrated aerial) 16 Infra-red horizon sensor 9 Receiver 9 Gumstix 12 Robostix 17 Harnesses and switches 15 Control system 78 (29%) TOTAL 267
22 University of Bristol -MAV 1.2 c C L Flight Test Model Span 350mm C D Tunnel Test Model Span 300mm Inverse Zimmerman Profile Flat Plate Span 350mm



23 University of Bristol -MAV MAV Configuration Aspect Ratio Cruise L/D Cambered circular plate Inverse Zimmerman plate Tunnel Model Flight Model EasyStar Test bed Elevator + Rudder




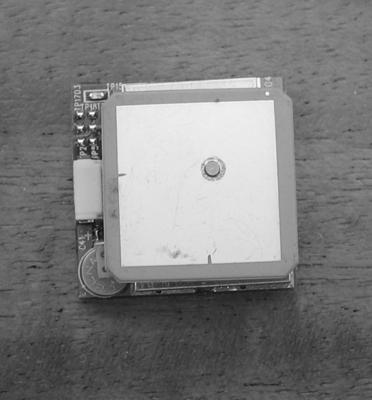
24 University of Bristol MAV Control Gumstix running Linux 64mb MMC card FMA copilot GPS receiver




25 LiPo Batteries Receiver Brushless Motor Motor Controller GPS receiver Servos Gumstix Robostix

26 University of Bristol -MAV Google Earth used to display aircraft trajectory NMEA to KML Post flight processing


27 Future Competitions Key areas for development Limits to MAV development?
28 MAV competitions This year sees the: 3rd US-European Competition and Workshop on Micro Air Vehicles 7th European Micro Air vehicle Conference and Flight Competition 2006 saw the: Tenth Annual Micro Air Vehicles Competition (US) Etc

29 Competitions -

30 Competitions -
31 Research Areas: Short Term Sensors continue to reduce the mass and size of sensors, e.g. GPS, E/O, Chemical Autonomy Deconfliction & Route Planning Multiple MAVs providing continuous coverage Endurance - available power, aerodynamics, structures V 2 Human factors & interface A R 2 2 MAV 2 Remaining Distance to B φ R2 O φ R1 R 1 V 1 1 B MAV 1 Remaining Distance to A
32 Research Areas: Medium Term Image stabilisation computer & physical Autonomy e.g. onboard rerouting, mapping Modern Control Systems e.g. Adaptive Control Video reduce bandwidth Gust tolerance Wing warping Delivery of payloads Civilian use vs Military
33 Research Areas: Long Term Perch and stare Ability to loiter behind enemy lines Energy scavenging, e.g. power lines Autonomy and navigation Alternative control motivators Flapping wing MAVs Available onboard computing power will continue increase dramatically offering much greater opportunities for onboard sensor processing, autonomy and control Alternative planforms and structures will be continue to be considered with a drive towards improved aerodynamic performance and reduced gust sensitivity
34 Are there limits to MAV development? e.g. Hypothetical set of Requirements Range of 20,000 km + Span of less than 90 cm Less than 150g Energy scavenging Operational for 10 years Autonomous navigation Realistic?

35 Arctic Tern Arctic Tern! cm long cm wingspan g Life span up to and in some cases over 20 years Longest migration of any bird 20,000 km + One Arctic Tern ringed as an unfledged chick on the Farne Islands, Northumberland, UK in summer 1982, reached Melbourne, Australia in October 1982, a sea journey of over 22,000 km (14,000 mi) in just three months from fledging Wikipedia!
36 Any Questions?
MAV and UAV Research at Rochester Institute of Technology. Rochester Institute of Technology
 MAV and UAV Research at Andrew Streett 5 th year BS/MS Student 2005-2006 MAV Team Lead Jason Grow BS/MS Graduate of RIT 2003-2004 MAV Team Lead Boeing Phantom Works, HB 714-372-9026 jason.a.grow@boeing.com
MAV and UAV Research at Andrew Streett 5 th year BS/MS Student 2005-2006 MAV Team Lead Jason Grow BS/MS Graduate of RIT 2003-2004 MAV Team Lead Boeing Phantom Works, HB 714-372-9026 jason.a.grow@boeing.com
DSSI UAV. Unmanned Aerial Vehicle. Research & Development Project
 UAV Unmanned Aerial Vehicle HISTORY AND SKILLS of Small UAV with electrically powered propeller Description of the solution: Airframe,electronics, 2 battery sets 1 spare Airframe, battery charger Transport
UAV Unmanned Aerial Vehicle HISTORY AND SKILLS of Small UAV with electrically powered propeller Description of the solution: Airframe,electronics, 2 battery sets 1 spare Airframe, battery charger Transport
THE KARANTANIA UNMANNED AERIAL SYSTEM
 THE KARANTANIA UNMANNED AERIAL SYSTEM ABSTRACT Tomaž Meze, Bogo Štempihar, Mihael Grom MIBO MODLI d.o.o. Čevica 6, SI 1370 Logatec, Slovenia tomi.meze@siol.net, info@mibojets.com Tone Magister University
THE KARANTANIA UNMANNED AERIAL SYSTEM ABSTRACT Tomaž Meze, Bogo Štempihar, Mihael Grom MIBO MODLI d.o.o. Čevica 6, SI 1370 Logatec, Slovenia tomi.meze@siol.net, info@mibojets.com Tone Magister University
Small UAV A French MoD perspective and planning
 Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
DRONE & UAV.
 www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led
 was founded by current company President Alexander Zakharov, since then he has led") A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Analysts/Fund Managers Visit 19 April Autonomous Systems and Future Capability Mark Kane
 Analysts/Fund Managers Visit 19 April 2007 Autonomous Systems and Future Capability Mark Kane The Rationale for UAVs The Rationale for UAVs UAVs generally seen to carry out the dull, dirty, and dangerous
Analysts/Fund Managers Visit 19 April 2007 Autonomous Systems and Future Capability Mark Kane The Rationale for UAVs The Rationale for UAVs UAVs generally seen to carry out the dull, dirty, and dangerous
Keywords: UAS, SIL, Modular UAS
 27 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES THE DEVELOPMENT OF AN UNMANNED AIRCRAFT SYSTEMS INTEGRATION LABORATORY AND MODULAR RESEARCH UAV J S Monk Council for Scientific and Industrial
27 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES THE DEVELOPMENT OF AN UNMANNED AIRCRAFT SYSTEMS INTEGRATION LABORATORY AND MODULAR RESEARCH UAV J S Monk Council for Scientific and Industrial
DESIGN AND DEVELOPMENT OF A MICRO AIR VEHICLE (µav) CONCEPT: PROJECT BIDULE
 CONCEPT: PROJECT BIDULE") DESIGN AND DEVELOPMENT OF A MICRO AIR VEHIE (µav) CONCEPT: PROJECT BIDULE Mr T. Spoerry, Dr K.C. Wong School of Aerospace, Mechanical and Mechatronic Engineering University of Sydney NSW 6 Abstract This
DESIGN AND DEVELOPMENT OF A MICRO AIR VEHIE (µav) CONCEPT: PROJECT BIDULE Mr T. Spoerry, Dr K.C. Wong School of Aerospace, Mechanical and Mechatronic Engineering University of Sydney NSW 6 Abstract This
Design of HOMA Micro Air Vehicle at IUT
 Design of HOMA Micro Air Vehicle at IUT Hesam Salehipour *, Nasim Amiri Mechanical Engineering Students, Isfahan, IRAN and Mahmud Ashrafizaadeh Assistant Professor, Department of Mechanical Engineering,
Design of HOMA Micro Air Vehicle at IUT Hesam Salehipour *, Nasim Amiri Mechanical Engineering Students, Isfahan, IRAN and Mahmud Ashrafizaadeh Assistant Professor, Department of Mechanical Engineering,
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business. Real-time Mechanism and System Simulation To Support Flight Simulators
 Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
Deliverable 3 Autonomous Flight Record
 Deliverable 3 Autonomous Flight Record 2012 UAV Outback Challenge Search and Rescue Challenge www.canberrauav.com Proudly Sponsored by: Paul Tridgell Terry Porter Grant Morphett Ron Graham Page 1 of 11
Deliverable 3 Autonomous Flight Record 2012 UAV Outback Challenge Search and Rescue Challenge www.canberrauav.com Proudly Sponsored by: Paul Tridgell Terry Porter Grant Morphett Ron Graham Page 1 of 11
Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles
 Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles Stuart Boland Derek Keen 1 Justin Nelson Brian Taylor Nick Wagner Dr. Thomas Bradley 47 th AIAA/ASME/SAE/ASEE JPC Outline
Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles Stuart Boland Derek Keen 1 Justin Nelson Brian Taylor Nick Wagner Dr. Thomas Bradley 47 th AIAA/ASME/SAE/ASEE JPC Outline
FLYEYE Unmanned Aerial System
 FLYEYE Unmanned Aerial System FLYEYE Unmanned Aerial System About Flytronic FLYTRONIC is a dynamic modern engineering company focussed on developing Unmanned Aerial Systems to provide observation and reconnaissance
FLYEYE Unmanned Aerial System FLYEYE Unmanned Aerial System About Flytronic FLYTRONIC is a dynamic modern engineering company focussed on developing Unmanned Aerial Systems to provide observation and reconnaissance
Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007
 Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007 UAV Sergio Esteban sesteban@us.es 1 Advanced Technologies and Engineering Co (Pty) Ltd (ATE). Vulture Production: Production
Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007 UAV Sergio Esteban sesteban@us.es 1 Advanced Technologies and Engineering Co (Pty) Ltd (ATE). Vulture Production: Production
BY HOEYCOMB AEROSPACE TECHNOLOGIES. HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV
 BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
Development of a Variable Stability, Modular UAV Airframe for Local Research Purposes
 Development of a Variable Stability, Modular UAV Airframe for Local Research Purposes John Monk Principal Engineer CSIR, South Africa 28 October 2008 Outline A Brief History of UAV Developments at the
Development of a Variable Stability, Modular UAV Airframe for Local Research Purposes John Monk Principal Engineer CSIR, South Africa 28 October 2008 Outline A Brief History of UAV Developments at the
Electric Penguin s philosophy:
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
31 st National Conference on FMFP, December 16-18, 2004, Jadavpur University, Kolkata
 31 st National Conference on FMFP, December 16-18, 24, Jadavpur University, Kolkata Experimental Characterization of Propulsion System for Mini Aerial Vehicle Kailash Kotwani *, S.K. Sane, Hemendra Arya,
31 st National Conference on FMFP, December 16-18, 24, Jadavpur University, Kolkata Experimental Characterization of Propulsion System for Mini Aerial Vehicle Kailash Kotwani *, S.K. Sane, Hemendra Arya,
Electric VTOL Aircraft
 Electric VTOL Aircraft Subscale Prototyping Overview Francesco Giannini fgiannini@aurora.aero 1 08 June 8 th, 2017 Contents Intro to Aurora Motivation & approach for the full-scale vehicle Technical challenges
Electric VTOL Aircraft Subscale Prototyping Overview Francesco Giannini fgiannini@aurora.aero 1 08 June 8 th, 2017 Contents Intro to Aurora Motivation & approach for the full-scale vehicle Technical challenges
Micro Craft Ducted Air Vehicle. Larry Lipera istar Program Manager Micro Craft Inc., San Diego, CA
 Micro Craft Ducted Air Vehicle Larry Lipera istar Program Manager (llipera@microcraft.com) Micro Craft Inc., San Diego, CA Abstract Recent military and commercial interest in Unmanned Air Vehicles has
Micro Craft Ducted Air Vehicle Larry Lipera istar Program Manager (llipera@microcraft.com) Micro Craft Inc., San Diego, CA Abstract Recent military and commercial interest in Unmanned Air Vehicles has
Helicopter Experience, Date: August 1-6 Location: Central Connecticut State University
 Helicopter Experience, 2010 Date: August 1-6 Location: Central Connecticut State University 1 Out Line Schedule Selection Process What students will receive 2 com For All Details 3 Sunday, August 1, 2010,
Helicopter Experience, 2010 Date: August 1-6 Location: Central Connecticut State University 1 Out Line Schedule Selection Process What students will receive 2 com For All Details 3 Sunday, August 1, 2010,
DESIGN AND DEVELOPMENT OF A MICRO AIR VEHICLE (MAV): TEST-BED FOR VISION-BASED CONTROL
: TEST-BED FOR VISION-BASED CONTROL") DESIGN AND DEVELOPMENT OF A MICRO AIR VEHICLE (MAV): TEST-BED FOR VISION-BASED CONTROL By SEWOONG JUNG A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE
DESIGN AND DEVELOPMENT OF A MICRO AIR VEHICLE (MAV): TEST-BED FOR VISION-BASED CONTROL By SEWOONG JUNG A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE
Jay Gundlach AIAA EDUCATION SERIES. Manassas, Virginia. Joseph A. Schetz, Editor-in-Chief. Blacksburg, Virginia. Aurora Flight Sciences
 Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology
 1953-2014 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology 01 Aircraft Engines Division Airworthiness Division IT Logistics Support Systems Division Aeroplanes & Helicopters Division
1953-2014 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology 01 Aircraft Engines Division Airworthiness Division IT Logistics Support Systems Division Aeroplanes & Helicopters Division
9/11/2018. UAS110 Intro to UAV Systems. UAS110 Intro to Unmanned Aerial Systems. Overview. Impetus. 3: UAV Classification
 UAS110 Intro to Unmanned Aerial Systems 2018 J. Sumey California University of PA rev. 9/11/18 Overview UAVs may be classified according to various metrics scale (size) method of lift generation range/endurance
UAS110 Intro to Unmanned Aerial Systems 2018 J. Sumey California University of PA rev. 9/11/18 Overview UAVs may be classified according to various metrics scale (size) method of lift generation range/endurance
Appenidix E: Freewing MAE UAV analysis
 Appenidix E: Freewing MAE UAV analysis The vehicle summary is presented in the form of plots and descriptive text. Two alternative mission altitudes were analyzed and both meet the desired mission duration.
Appenidix E: Freewing MAE UAV analysis The vehicle summary is presented in the form of plots and descriptive text. Two alternative mission altitudes were analyzed and both meet the desired mission duration.
Design of 'Iris', a Small Autonomous Surveillance UAV
 Utah State University DigitalCommons@USU Mechanical and Aerospace Engineering Faculty Publications Mechanical and Aerospace Engineering 1-9-2006 Design of 'Iris', a Small Autonomous Surveillance UAV Jennifer
Utah State University DigitalCommons@USU Mechanical and Aerospace Engineering Faculty Publications Mechanical and Aerospace Engineering 1-9-2006 Design of 'Iris', a Small Autonomous Surveillance UAV Jennifer
Palos Verdes High School 1
 Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
A brief History of Unmanned Aircraft
 A brief History of Unmanned Aircraft Technological Background Dr. Bérénice Mettler University of Minnesota Jan. 22-24, 2012 (v. 1/15/13) Dr. Bérénice Mettler (University of Minnesota) A brief History of
A brief History of Unmanned Aircraft Technological Background Dr. Bérénice Mettler University of Minnesota Jan. 22-24, 2012 (v. 1/15/13) Dr. Bérénice Mettler (University of Minnesota) A brief History of
Length Height Rotor Diameter Tail Rotor Diameter..12. Tail Boom Length Width
 2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
Clean Sky 2. LifeCraft Demonstrationt (IADP RC 2 & ITDs) Consultation meetings Brussels th December 2012 OUTLINE
 Consultation meetings Brussels th December 2012 OUTLINE") Clean Sky 2 LifeCraft Demonstrationt (IADP RC 2 & ITDs) Consultation meetings Brussels 10-14 th December 2012 1 1 LifeCraft - The Compound Demo OUTLINE Presentation of the Compound R/C Concept Impact &
Clean Sky 2 LifeCraft Demonstrationt (IADP RC 2 & ITDs) Consultation meetings Brussels 10-14 th December 2012 1 1 LifeCraft - The Compound Demo OUTLINE Presentation of the Compound R/C Concept Impact &
Design and construction a flying wing unmanned aerial vehicles
 Design and construction a flying wing unmanned aerial vehicles Vasile Prisacariu 1, Mircea Boscoianu 2 SUMMARY: Unmanned aerial vehicles (UAV) are starting to represent a larger importance in the aerospace
Design and construction a flying wing unmanned aerial vehicles Vasile Prisacariu 1, Mircea Boscoianu 2 SUMMARY: Unmanned aerial vehicles (UAV) are starting to represent a larger importance in the aerospace
AT-10 Electric/HF Hybrid VTOL UAS
 AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
PENGUIN B UAV PLATFORM
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v.0 PENGUIN B UAV PLATFORM Penguin B platform ready for payload and autopilot integration 0+ hour endurance Fuel injected engine option Up to 10 kg payload capacity
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v.0 PENGUIN B UAV PLATFORM Penguin B platform ready for payload and autopilot integration 0+ hour endurance Fuel injected engine option Up to 10 kg payload capacity
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials. Ripley Valley Rural Fire Brigade - August 2010
 Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
SURVEYOR-H. Technical Data. Max speed 120 km/h. Engine power 7.2 hp. Powerplant Modified Zenoah G29E. Fuel tank volume 3.6 l
 rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
Innovating the future of disaster relief
 Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
SILENT SUPERSONIC TECHNOLOGY DEMONSTRATION PROGRAM
 25 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES SILENT SUPERSONIC TECHNOLOGY DEMONSTRATION PROGRAM Akira Murakami* *Japan Aerospace Exploration Agency Keywords: Supersonic, Flight experiment,
25 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES SILENT SUPERSONIC TECHNOLOGY DEMONSTRATION PROGRAM Akira Murakami* *Japan Aerospace Exploration Agency Keywords: Supersonic, Flight experiment,
Mechanical Development of a Micro Aerial Vehicle (MAV) for the 1st US-Asian MAV Demonstration & Assessment. Bachelor of Engineering (Aerospace)
 for the 1st US-Asian MAV Demonstration & Assessment. Bachelor of Engineering (Aerospace)") SCHOOL OF MECHANICAL AND MANUFACTURING ENGINEERING Mechanical Development of a Micro Aerial Vehicle (MAV) for the 1st US-Asian MAV Demonstration & Assessment Moises Alexis NICOLETTI 3060471 Bachelor of
SCHOOL OF MECHANICAL AND MANUFACTURING ENGINEERING Mechanical Development of a Micro Aerial Vehicle (MAV) for the 1st US-Asian MAV Demonstration & Assessment Moises Alexis NICOLETTI 3060471 Bachelor of
Membrane Wing Aerodynamics for µav Applications
 Membrane Wing Aerodynamics for µav Applications Wei Shyy, Yongsheng Lian & Peter Ifju Department of Mechanical and Aerospace Engineering University of Florida Gainesville, FL 32611 Wei-shyy@ufl.edu Department
Membrane Wing Aerodynamics for µav Applications Wei Shyy, Yongsheng Lian & Peter Ifju Department of Mechanical and Aerospace Engineering University of Florida Gainesville, FL 32611 Wei-shyy@ufl.edu Department
TABLE OF CONTENTS. Thank you for your interest in CUAir
 SPONSORSHIP INFORMATION 2018-2019 TABLE OF CONTENTS The Team Subteams The Competition Theia II Accomplishments 2019 Air System Outreach Why Contribute Sponsorship Levels 2017-2018 Sponsors Contact Us 3
SPONSORSHIP INFORMATION 2018-2019 TABLE OF CONTENTS The Team Subteams The Competition Theia II Accomplishments 2019 Air System Outreach Why Contribute Sponsorship Levels 2017-2018 Sponsors Contact Us 3
Autonomous payload drop system using mini Unmanned Aerial Vehicles
 Autonomous payload drop system using mini Unmanned Aerial Vehicles Rohan Pratap Singh Department of Electrical and Electronics Engineering Delhi Technological University, Delhi, India Akash Garg Department
Autonomous payload drop system using mini Unmanned Aerial Vehicles Rohan Pratap Singh Department of Electrical and Electronics Engineering Delhi Technological University, Delhi, India Akash Garg Department
Design and Development of the UTSA Unmanned Aerial System ACE 1
 Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Design of a High Altitude Fixed Wing Mini UAV Aerodynamic Challenges
 Design of a High Altitude Fixed Wing Mini UAV Aerodynamic Challenges Hemant Sharma 1, C. S. Suraj 2, Roshan Antony 3, G. Ramesh 4, Sajeer Ahmed 5 and Prasobh Narayan 6 1, 2, 3, 4 CSIR National Aerospace
Design of a High Altitude Fixed Wing Mini UAV Aerodynamic Challenges Hemant Sharma 1, C. S. Suraj 2, Roshan Antony 3, G. Ramesh 4, Sajeer Ahmed 5 and Prasobh Narayan 6 1, 2, 3, 4 CSIR National Aerospace
Development of a Low Cost DIY UAV Mapping Platform
 Development of a Low Cost DIY UAV Mapping Platform James Parkes Tritan Survey CC, Engineering and Hydrographic Surveyors, Cape Town, South Africa +27 21 797 2081 - jamesp@tritan.co.za Abstract In the past
Development of a Low Cost DIY UAV Mapping Platform James Parkes Tritan Survey CC, Engineering and Hydrographic Surveyors, Cape Town, South Africa +27 21 797 2081 - jamesp@tritan.co.za Abstract In the past
A SOLAR POWERED UAV. 1 Introduction. 2 Requirements specification
 A SOLAR POWERED UAV Students: R. al Amrani, R.T.J.P.A. Cloosen, R.A.J.M. van den Eijnde, D. Jong, A.W.S. Kaas, B.T.A. Klaver, M. Klein Heerenbrink, L. van Midden, P.P. Vet, C.J. Voesenek Project tutor:
A SOLAR POWERED UAV Students: R. al Amrani, R.T.J.P.A. Cloosen, R.A.J.M. van den Eijnde, D. Jong, A.W.S. Kaas, B.T.A. Klaver, M. Klein Heerenbrink, L. van Midden, P.P. Vet, C.J. Voesenek Project tutor:
The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production
 AUVSI Unmanned Systems North America 2013 Conference August 14, 2013 The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com
AUVSI Unmanned Systems North America 2013 Conference August 14, 2013 The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com
ROBUST AIRFRAME FOR UAV FLIGHT TESTING FOR SALE!
 ROBUST AIRFRAME FOR UAV FLIGHT TESTING FOR SALE! My team specializes in fabricating airframes that s appropriate for testing unmanned aerial vehicle components. Our airframes are made of hybrid composite
ROBUST AIRFRAME FOR UAV FLIGHT TESTING FOR SALE! My team specializes in fabricating airframes that s appropriate for testing unmanned aerial vehicle components. Our airframes are made of hybrid composite
1.1 REMOTELY PILOTED AIRCRAFTS
 CHAPTER 1 1.1 REMOTELY PILOTED AIRCRAFTS Remotely Piloted aircrafts or RC Aircrafts are small model radiocontrolled airplanes that fly using electric motor, gas powered IC engines or small model jet engines.
CHAPTER 1 1.1 REMOTELY PILOTED AIRCRAFTS Remotely Piloted aircrafts or RC Aircrafts are small model radiocontrolled airplanes that fly using electric motor, gas powered IC engines or small model jet engines.
Air Buzz. 32nd Annual AHS International Student Design Competition
 Air Buzz 32nd Annual AHS International Student Design Competition Faculty Advisor: Dr. Daniel Schrage, Daniel.Schrage@aerospace.gatech.edu Ezgi Selin Akdemir esakdemir@gmail.com Undergraduate Middle East
Air Buzz 32nd Annual AHS International Student Design Competition Faculty Advisor: Dr. Daniel Schrage, Daniel.Schrage@aerospace.gatech.edu Ezgi Selin Akdemir esakdemir@gmail.com Undergraduate Middle East
PENGUIN C UAS OPERATIONS & MAINTENANCE TRAINING 20 HOURS FLIGHT ENDURANCE 100KM RANGE ITAR - FREE CREW OF TWO
 PENGUIN C UAS LONG ENDURANCE UNMANNED AERIAL SYSTEM 20 HOURS FLIGHT ENDURANCE OPERATIONS & MAINTENANCE TRAINING 100KM RANGE ITAR - FREE CREW OF TWO U AV FAC T O RY LT D., E U R O P E U AV FAC T O RY U
PENGUIN C UAS LONG ENDURANCE UNMANNED AERIAL SYSTEM 20 HOURS FLIGHT ENDURANCE OPERATIONS & MAINTENANCE TRAINING 100KM RANGE ITAR - FREE CREW OF TWO U AV FAC T O RY LT D., E U R O P E U AV FAC T O RY U
Predator B: The Multi-Role UAV
 Predator B: The Multi-Role UAV June 2002 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated to average 1 hour per response,
Predator B: The Multi-Role UAV June 2002 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated to average 1 hour per response,
Solar Based Propulsion System UAV Conceptual Design ( * )
") Solar Based Propulsion System UAV Conceptual Design ( * ) Avi Ayele*, Ohad Gur, and Aviv Rosen* *Technion Israel Institute of Technology IAI Israel Aerospace Industries (*) Ayele A., Gur O., Rosen A.,
Solar Based Propulsion System UAV Conceptual Design ( * ) Avi Ayele*, Ohad Gur, and Aviv Rosen* *Technion Israel Institute of Technology IAI Israel Aerospace Industries (*) Ayele A., Gur O., Rosen A.,
Development of an Autonomous Aerial Reconnaissance Platform at Virginia Tech
 Development of an Autonomous Aerial Reconnaissance Platform at Virginia Tech Gregg Vonder Reith, Ken Meidenbauer, Imraan Faruque, Chris Sharkey Jared Cooper, Shane Barnett, Dr. Charles Reinholtz Department
Development of an Autonomous Aerial Reconnaissance Platform at Virginia Tech Gregg Vonder Reith, Ken Meidenbauer, Imraan Faruque, Chris Sharkey Jared Cooper, Shane Barnett, Dr. Charles Reinholtz Department
DEVELOPMENT OF DESIGN AND MANUFACTURING OF A FIXED WING RADIO CONTROLLED MICRO AIR VEHICLE (MAV)
") DEVELOPMENT OF DESIGN AND MANUFACTURING OF A FIXED WING RADIO CONTROLLED MICRO AIR VEHICLE (MAV) M A Hossain (1), F Hasan (2), A F M T Seraz (2) and S A Rajib (2) 1. Asst. Professor, Department of Mechanical
DEVELOPMENT OF DESIGN AND MANUFACTURING OF A FIXED WING RADIO CONTROLLED MICRO AIR VEHICLE (MAV) M A Hossain (1), F Hasan (2), A F M T Seraz (2) and S A Rajib (2) 1. Asst. Professor, Department of Mechanical
High aspect ratio for high endurance. Mechanical simplicity. Low empty weight. STOVL or STOL capability. And for the propulsion system:
 Idealized tilt-thrust (U) All of the UAV options that we've been able to analyze suffer from some deficiency. A diesel, fixed-wing UAV could possibly satisfy the range and endurance objectives, but integration
Idealized tilt-thrust (U) All of the UAV options that we've been able to analyze suffer from some deficiency. A diesel, fixed-wing UAV could possibly satisfy the range and endurance objectives, but integration
DESIGN AND ANALYSIS OF AUTONOMOUS 400MM SPAN FIXED WING MICRO AERIAL VEHICLE
 DESIGN AND ANALYSIS OF AUTONOMOUS 400MM SPAN FIXED WING MICRO AERIAL VEHICLE M.Satyanarayana Gupta M.Venkateswar Reddy Professor and HOD, Aeronautical Department, AssociateProfessor, MLR Institute of Technology,
DESIGN AND ANALYSIS OF AUTONOMOUS 400MM SPAN FIXED WING MICRO AERIAL VEHICLE M.Satyanarayana Gupta M.Venkateswar Reddy Professor and HOD, Aeronautical Department, AssociateProfessor, MLR Institute of Technology,
Marek, Przemyslaw Lech (2008) Design, optimization and flight testing of a micro air vehicle. MSc(R) thesis.
 Design, optimization and flight testing of a micro air vehicle. MSc(R) thesis.") Marek, Przemyslaw Lech (2008) Design, optimization and flight testing of a micro air vehicle. MSc(R) thesis. http://theses.gla.ac.uk/259/ Copyright and moral rights for this thesis are retained by the
Marek, Przemyslaw Lech (2008) Design, optimization and flight testing of a micro air vehicle. MSc(R) thesis. http://theses.gla.ac.uk/259/ Copyright and moral rights for this thesis are retained by the
UAVs UK - factsheet. The Variants. Desert Hawk
 FS 70 UAVs UK - factsheet The Variants Desert Hawk Battery powered and hand launched. Can fly for around one hour at 200-800 feet within a 15km radius of its ground control system. Used for battlefield
FS 70 UAVs UK - factsheet The Variants Desert Hawk Battery powered and hand launched. Can fly for around one hour at 200-800 feet within a 15km radius of its ground control system. Used for battlefield
Unmanned Air Vehicles (UAVs): Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos
: Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos") Unmanned Air Vehicles (UAVs): Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos The presenter Dr-Ing Dimitrios E. Mazarakos Dipl. in Mechanical Engineering and
Unmanned Air Vehicles (UAVs): Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos The presenter Dr-Ing Dimitrios E. Mazarakos Dipl. in Mechanical Engineering and
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
Improvement of Micro UAV Performance using Tandem-Wing Design
 Al-Nahrain University, College of Engineering Journal (NUCEJ) Vol.91 No.2, 6192 pp.363-369 Improvement of Micro UAV Performance using Tandem-Wing Design Omar Abdulrazzak Khudair Shurouq Adnan Aziz Huda
Al-Nahrain University, College of Engineering Journal (NUCEJ) Vol.91 No.2, 6192 pp.363-369 Improvement of Micro UAV Performance using Tandem-Wing Design Omar Abdulrazzak Khudair Shurouq Adnan Aziz Huda
The winner team will have the opportunity to perform a wind tunnel test campaign in the transonic/supersonic Wind tunnel at the VKI.
 Aircraft Design Competition Request for proposal (RFP) - High speed UAV Objectives: This RFP asks for an original UAV design capable of reaching, in less than 15 minutes, a given target located at 150
Aircraft Design Competition Request for proposal (RFP) - High speed UAV Objectives: This RFP asks for an original UAV design capable of reaching, in less than 15 minutes, a given target located at 150
Design and Simulation of New Versions of Tube Launched UAV
 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]
![How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]](/thumbs/89/99262679.jpg "How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]") 1! How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution] !2 How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) Introduction Terminology
1! How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution] !2 How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) Introduction Terminology
Content. Introduction. Technology. Type of unmanned vehicle. Past, Present, Future. Conclusion
 Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
Reconfigurable Unmanned Aerial Vehicle Design and Control
 Department of Aerospace Engineering IIT Kanpur, India Reconfigurable Unmanned Aerial Vehicle Design and Control Abhishek IIT Kanpur Rama Krishna, Sourav Sinha and Joydeep Bhowmick 1 UAV Solutions Developed
Department of Aerospace Engineering IIT Kanpur, India Reconfigurable Unmanned Aerial Vehicle Design and Control Abhishek IIT Kanpur Rama Krishna, Sourav Sinha and Joydeep Bhowmick 1 UAV Solutions Developed
The Doomerang University of California, Los Angeles
 The Doomerang University of California, Los Angeles 8 th Annual Student UAS Competition Association for Unmanned Vehicle Systems International Table of Contents Team Structure... 2 Abstract... 3 Introduction...
The Doomerang University of California, Los Angeles 8 th Annual Student UAS Competition Association for Unmanned Vehicle Systems International Table of Contents Team Structure... 2 Abstract... 3 Introduction...
AirEZ. Executive Summary. American Helicopter Society International 32 nd Annual Student Design Competition Graduate Student Team Submission
 AirEZ Executive Summary American Helicopter Society International 32 nd Annual Student Design Competition Graduate Student Team Submission Overview: AirEZ Vehicle Battery 2.04 kw-hr lithium-sulfur battery
AirEZ Executive Summary American Helicopter Society International 32 nd Annual Student Design Competition Graduate Student Team Submission Overview: AirEZ Vehicle Battery 2.04 kw-hr lithium-sulfur battery
suas in CAP Delaware Wing HQ, Civil Air Patrol Development of small Unmanned Aerial Systems
 Delaware Wing HQ, Civil Air Patrol suas in CAP Development of small Unmanned Aerial Systems Advent of the suas Small Unmanned Aerial Systems have become very common recently Sophisticated microprocessors
Delaware Wing HQ, Civil Air Patrol suas in CAP Development of small Unmanned Aerial Systems Advent of the suas Small Unmanned Aerial Systems have become very common recently Sophisticated microprocessors
CENTAUR OPTIONALLY-PILOTED AIRCRAFT ULTIMATE FLEXIBILITY FOR AIRBORNE SENSING
 CENTAUR OPTIONALLY-PILOTED AIRCRAFT ULTIMATE FLEXIBILITY FOR AIRBORNE SENSING CENTAUR A NEW LEVEL OF OPERATIONAL FLEXIBILITY Aurora Flight Sciences Centaur combines the best of manned and unmanned surveillance
CENTAUR OPTIONALLY-PILOTED AIRCRAFT ULTIMATE FLEXIBILITY FOR AIRBORNE SENSING CENTAUR A NEW LEVEL OF OPERATIONAL FLEXIBILITY Aurora Flight Sciences Centaur combines the best of manned and unmanned surveillance
blended wing body aircraft for the
 Feasibility study of a nuclear powered blended wing body aircraft for the Cruiser/Feeder eede concept cept G. La Rocca - TU Delft 11 th European Workshop on M. Li - TU Delft Aircraft Design Education Linköping,
Feasibility study of a nuclear powered blended wing body aircraft for the Cruiser/Feeder eede concept cept G. La Rocca - TU Delft 11 th European Workshop on M. Li - TU Delft Aircraft Design Education Linköping,
BAYLOR UNIVERSITY DEPARTMENT OF ENGINEERING. EGR 4347 Analysis and Design of Propulsion Systems Fall 2002 ASSIGNMENT GUIDELINES
 BAYLOR UNIVERSITY DEPARTMENT OF ENGINEERING EGR 4347 Analysis and Design of Propulsion Systems Fall 2002 Design Project I Dr Van Treuren 100 points ASSIGNMENT GUIDELINES For this assignment, you may work
BAYLOR UNIVERSITY DEPARTMENT OF ENGINEERING EGR 4347 Analysis and Design of Propulsion Systems Fall 2002 Design Project I Dr Van Treuren 100 points ASSIGNMENT GUIDELINES For this assignment, you may work
Tactical Technology Office. Tactical Technology Office. Programs. DARPATech 2000 Dr. David Whelan Director Whelan Darpatech
 Programs DARPATech 2000 Dr. David Whelan Director dwhelan@darpa.mil Global Surveillance Land Systems Aerospace Systems Embedded Processing & Control Global Surveillance Objectives: Birth-to-Death Track
Programs DARPATech 2000 Dr. David Whelan Director dwhelan@darpa.mil Global Surveillance Land Systems Aerospace Systems Embedded Processing & Control Global Surveillance Objectives: Birth-to-Death Track
Design and Development of Multi Ornithopter using Bio-mimic Method and Analysis
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 6, Number 5 (2013), pp. 593-604 International Research Publication House http://www.irphouse.com Design and Development
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 6, Number 5 (2013), pp. 593-604 International Research Publication House http://www.irphouse.com Design and Development
Electric Flight Potential and Limitations
 Electric Flight Potential and Limitations Energy Efficient Aircraft Configurations, Technologies and Concepts of Operation, Sao José dos Campos, 19 21 November 2013 Dr. Martin Hepperle DLR Institute of
Electric Flight Potential and Limitations Energy Efficient Aircraft Configurations, Technologies and Concepts of Operation, Sao José dos Campos, 19 21 November 2013 Dr. Martin Hepperle DLR Institute of
AERO. Meet the Aero. Congratulations on your purchase of an Aero!
 AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
German Aerospace Center Flight Operations
 German Aerospace Center Flight Operations Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes distributed over 8 main research centers
German Aerospace Center Flight Operations Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes distributed over 8 main research centers
STUDYING THE POSSIBILITY OF INCREASING THE FLIGHT AUTONOMY OF A ROTARY-WING MUAV
 SCIENTIFIC RESEARCH AND EDUCATION IN THE AIR FORCE AFASES2017 STUDYING THE POSSIBILITY OF INCREASING THE FLIGHT AUTONOMY OF A ROTARY-WING MUAV Cristian VIDAN *, Daniel MĂRĂCINE ** * Military Technical
SCIENTIFIC RESEARCH AND EDUCATION IN THE AIR FORCE AFASES2017 STUDYING THE POSSIBILITY OF INCREASING THE FLIGHT AUTONOMY OF A ROTARY-WING MUAV Cristian VIDAN *, Daniel MĂRĂCINE ** * Military Technical
Aviation Research Group RPAS (Remotely Piloted Aircraft Systems) OOSTENDE Belgium
 OOSTENDE Belgium") RPAS (Remotely Piloted Aircraft Systems) OOSTENDE Belgium I. Becuwe, R. De Roo 1 Location Ostend 1h30 1h Lille (F) Brussels I. Becuwe, R. De Roo 2 VIVES Brugge Oostende Torhout Tielt Roeselare Kortrijk
RPAS (Remotely Piloted Aircraft Systems) OOSTENDE Belgium I. Becuwe, R. De Roo 1 Location Ostend 1h30 1h Lille (F) Brussels I. Becuwe, R. De Roo 2 VIVES Brugge Oostende Torhout Tielt Roeselare Kortrijk
Massachusetts Institute of Technology Unmanned Aerial Vehicle Team. Jonathan Downey, Derrick Tan. June 16, Abstract
 Entry for the 3 rd Annual AUVSI Student UAV Competition Massachusetts Institute of Technology Unmanned Aerial Vehicle Team Jonathan Downey, Derrick Tan June 16, 2005 Abstract This year, the MIT Unmanned
Entry for the 3 rd Annual AUVSI Student UAV Competition Massachusetts Institute of Technology Unmanned Aerial Vehicle Team Jonathan Downey, Derrick Tan June 16, 2005 Abstract This year, the MIT Unmanned
System Requirements Review
 AAE 451 Aircraft Senior Design Spring 2007 Continuous Area Coverage via Fixed-Wing Unmanned Aerial Systems System Requirements Review Team 3 Sumitero Darsono Charles Hagenbush Keith Higdon Seung-il Kim
AAE 451 Aircraft Senior Design Spring 2007 Continuous Area Coverage via Fixed-Wing Unmanned Aerial Systems System Requirements Review Team 3 Sumitero Darsono Charles Hagenbush Keith Higdon Seung-il Kim
Unmanned Aerial Vehicle Design, Development, and Implementation
 Unmanned Aerial Vehicle Design, Development, and Implementation Faculty Advisor Dr. David Schmidt Team Members Patrick Herklotz, Shane Kirkbride, Mike Kopps, Mark Kraska, John Ordeman, Erica Rygg, Matt
Unmanned Aerial Vehicle Design, Development, and Implementation Faculty Advisor Dr. David Schmidt Team Members Patrick Herklotz, Shane Kirkbride, Mike Kopps, Mark Kraska, John Ordeman, Erica Rygg, Matt
The Development of A New VTOL UAV Configuration For Law Enforcement
 The Development of A New VTOL UAV Configuration For Law Enforcement Zamri Omar Department of Mechanical Engineering UTHM University, K.B 101, Pt.Raja Johor, Malaysia Email: zamri@uthm.edu.my Cees Bil,
The Development of A New VTOL UAV Configuration For Law Enforcement Zamri Omar Department of Mechanical Engineering UTHM University, K.B 101, Pt.Raja Johor, Malaysia Email: zamri@uthm.edu.my Cees Bil,
DESIGN OF AN ARMAMENT WING FOR A LIGHT CATEGORY HELICOPTER
 International Journal of Engineering Applied Sciences and Technology, 7 Published Online February-March 7 in IJEAST (http://www.ijeast.com) DESIGN OF AN ARMAMENT WING FOR A LIGHT CATEGORY HELICOPTER Miss.
International Journal of Engineering Applied Sciences and Technology, 7 Published Online February-March 7 in IJEAST (http://www.ijeast.com) DESIGN OF AN ARMAMENT WING FOR A LIGHT CATEGORY HELICOPTER Miss.
aviation week A New Approach To VTOL Page 36 Secure Collaboration On The Internet THE FIGHT OVER F-22 & SPACE TECHNOLOGY Page 53 Page 44
 THE FIGHT OVER F-22 aviation $6.00 JULY 20, 2009 week & SPACE TECHNOLOGY A New Approach To VTOL Page 36 Secure Collaboration On The Internet Page 44 Page 53 AviationWeek.com/awst Page 1 of 1 Print This
THE FIGHT OVER F-22 aviation $6.00 JULY 20, 2009 week & SPACE TECHNOLOGY A New Approach To VTOL Page 36 Secure Collaboration On The Internet Page 44 Page 53 AviationWeek.com/awst Page 1 of 1 Print This
PIAGGIO AERO P.1HH HammerHead UAS
 Medium Altitude Long Endurance ISR Unmanned Aerial System Dimensions Span 15.600 m [51.18 ft] Length 14.408 m [47.27 ft] Height 3.980 m [13.05 ft] Areas Wing 18.00 m2 [193.75 ft2] Horizontal Tail 3.834
Medium Altitude Long Endurance ISR Unmanned Aerial System Dimensions Span 15.600 m [51.18 ft] Length 14.408 m [47.27 ft] Height 3.980 m [13.05 ft] Areas Wing 18.00 m2 [193.75 ft2] Horizontal Tail 3.834
DESIGN AND FABRICATION OF AN AUTONOMOUS SURVEILLANCE HEXACOPTER
 Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2015 (ICMERE2015) 26 29 November, 2015, Chittagong, Bangladesh ICMERE2015-PI-208 DESIGN AND FABRICATION OF AN
Proceedings of the International Conference on Mechanical Engineering and Renewable Energy 2015 (ICMERE2015) 26 29 November, 2015, Chittagong, Bangladesh ICMERE2015-PI-208 DESIGN AND FABRICATION OF AN
UAV Drones. Team RamRod: Tyler Barry James Bohn Daniel Ramirez Hari Shrestha Arlo Swanson Garret Wilbanks
 UAV Drones Team RamRod: Tyler Barry James Bohn Daniel Ramirez Hari Shrestha Arlo Swanson Garret Wilbanks Outline Introduction History Technology and Applications Current Future Economics and Marketability
UAV Drones Team RamRod: Tyler Barry James Bohn Daniel Ramirez Hari Shrestha Arlo Swanson Garret Wilbanks Outline Introduction History Technology and Applications Current Future Economics and Marketability
Unmanned Aircraft in Border Patrol Activities
 Annual UAS Conference Operational and Technology Readiness 25 th 26 th September 2011 Conference Unmanned Aircraft in Border Patrol Activities Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com Barnard
Annual UAS Conference Operational and Technology Readiness 25 th 26 th September 2011 Conference Unmanned Aircraft in Border Patrol Activities Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com Barnard
Flight Research using Radio-controlled Small Airplanes
 Flight Research using Radio-controlled Small Airplanes S P Govinda Raju S P Govinda Raju is a Professor at the Aerospace Engineering Department, Indian Institute of Science, Bangalore. His interests are
Flight Research using Radio-controlled Small Airplanes S P Govinda Raju S P Govinda Raju is a Professor at the Aerospace Engineering Department, Indian Institute of Science, Bangalore. His interests are
DESIGN AND FLIGHT TEST RESULTS FOR MICRO-SIZED FIXED-WING AND VTOL AIRCRAFT. Stephen J. Morris. President, MLB Company.
 Page 1 of 14 DESIGN AND FLIGHT TEST RESULTS FOR MICRO-SIZED FIXED-WING AND VTOL AIRCRAFT Stephen J. Morris President, MLB Company 137 Lundy Lane Palo Alto, CA 94306 ABSTRACT There has been recent interest
Page 1 of 14 DESIGN AND FLIGHT TEST RESULTS FOR MICRO-SIZED FIXED-WING AND VTOL AIRCRAFT Stephen J. Morris President, MLB Company 137 Lundy Lane Palo Alto, CA 94306 ABSTRACT There has been recent interest
Georgia Tech NASA Critical Design Review Teleconference Presented By: Georgia Tech Team ARES
 Georgia Tech NASA Critical Design Review Teleconference Presented By: Georgia Tech Team ARES 1 Agenda 1. Team Overview (1 Min) 2. 3. 4. 5. 6. 7. Changes Since Proposal (1 Min) Educational Outreach (1 Min)
Georgia Tech NASA Critical Design Review Teleconference Presented By: Georgia Tech Team ARES 1 Agenda 1. Team Overview (1 Min) 2. 3. 4. 5. 6. 7. Changes Since Proposal (1 Min) Educational Outreach (1 Min)
AERO. Meet the Aero. Congratulations on your purchase of an Aero!
 AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
AN IMPROVED LIGHTWEIGHT MICRO SCALE VEHICLE CAPABLE OF AERIAL AND TERRESTRIAL LOCOMOTION MATTHEW RYAN POLAKOWSKI
 AN IMPROVED LIGHTWEIGHT MICRO SCALE VEHICLE CAPABLE OF AERIAL AND TERRESTRIAL LOCOMOTION by MATTHEW RYAN POLAKOWSKI Submitted in partial fulfillment of the requirements For the degree of Master of Science
AN IMPROVED LIGHTWEIGHT MICRO SCALE VEHICLE CAPABLE OF AERIAL AND TERRESTRIAL LOCOMOTION by MATTHEW RYAN POLAKOWSKI Submitted in partial fulfillment of the requirements For the degree of Master of Science
Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon
 , Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
, Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition
 Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Design and Navigation of Flying Robots
 Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH