Actuators and Sensors
|
|
|
- Earl Boyd
- 5 years ago
- Views:
Transcription
1 Lecture 6 February 05, 2018 Actuators and Sensors Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi
2 Announcement Outlines of lectures 1-3,4&5 are available in Review of Lecture 4&5 Coordinate Transformation Relation between two coordinate frames Homogeneous Transformation Matrix (HTM) Forward and inverse kinematics Solved examples
3 Questions from Lecture 4? What is the size of a HTM? How many solution FK has? How many solution IK of a 2-DOF arm has? How many solutions IK of Kuka KR5 Arc robot has?
4 Project (A report on the Exam. Day) For your plant choose an appropriate robot for painting cylindrical box of 50cm height with 30cm diameter (Submit a report on the day of exam.)
5 Outline An actuation system Electric actuators Stepper motors DC motors AC motors Linear actuators Hydraulic and pneumatic actuators Selection of motors Sensors
6 An Actuation System A power supply A power amplifier A motor A transmission system Actuator vs. Motor? (Interchangeably used)
7 Electric Actuators Electric motors + Mechanical transmissions First commercial electric motor: 1974 by ABB
8 Advantages vs. Disadvantages Advantages Widespread availability of power supply. Basic drive element is lighter than fluid power. High power conversion efficiency. No pollution accuracy + repeatability compared to cost. Quiet and clean
9 Easily maintained and repaired. Components are lightweight. Drive system is suitable to electronic control. Disadvantages Requires mechanical transmission system. Adds mass and unwanted movement. Requires additional power + cost. Not safe in explosive atmospheres.
10 Electric Motors Stepper motors Variable Reluctance Permanent Magnet Hybrid Small/Medium end of industrial range Digitally controlled No feedback Incremental shaft rotation for each pulse
11 Steps range from deg. To know final position, count # of pulses Vel. = # of pulse per unit time 500 pulses/sec 150 rpm (1.8 o /pulse) Pulses cease, motor stops. No brake, etc. Max. torque at low pulse rate Many steppers from same source. Exact synchronization
12 DC Motors Direct Current: Used in toys etc. Electrically driven robots us DC Introduced in 1974 by ABB Powerful versions available Control is simple Batteries are rarely used AC supply is rectified to DC
13 Principle of a DC Motor Magnetic Field Stator Field coils wound on the stators Permanent magnet Conductor (Armature) Rotor Current via brushes + commutators Maximum torque for σ = 90 o
14 Features of a DC Motor High voltage in stator coils Fast speed (simple speed control) Varying current in armature Controls torque Reversing polarity Turns opposite Larger robots: Field control DC motor Current in field coils Controls torque High power@high speed + High power/wt.
15 Specification & Characteristic Technical Specifications of DC Motors Brand Parvalux Manufacturer Part No. PM2 160W Type Industrial DC Electric Motors Shaft Size (S,M,L) M Speed (rpm) 4000 rpm Power Rating (W) 160 W Voltage Rating (Vdc) 50 V(dc) Input Current 3.8 A Height Width Length 78 mm 140 mm 165 mm

16 Characteristics
17 Permanent Magnet (PM) Motor Two configurations Cylindrical [Common in industrial robots] Disk No field coils Field is by permanent magnets (PM) Some PM has coils for recharge Torque Armature current [Const. flux]
18 Advantages of PM DC Motors No power supplies for field coils Reliability is high No power loss due to field supply Improved Efficiency + Cooling
19 Brushless PM DC Motor Problem with DC motors Commuter and brushes Periodical reversal of current through each armature coil Brushes + Commutators Sliding contact Sparks Wear Change brushes + Resurface commuators Solution: Brushless motors
20 Principles of Brushless PM Reverse principle than convention DC Current carrying conductor (stator) experience a force Magnet (rotor) will experience a reaction (Newton s 3 rd law) Current to stator coils is electronically switched by transistors (Expensive) Switching is controlled by rotor position Magnet (rotor) rotates same direction
21 Advantages of Brushless PM Better heat dissipation Reduced rotor inertia Weigh less Less expensive + Durable Smaller for comparable power Absence of brushes Reduced maintenance cost Electric robots Hazardous areas with flammable atmospheres (Spray painting)
22 AC Motors Alternating Current: Domestic supply 50 Hz; 220 V (India) 60 Hz; 110 V (USA) Difficult to control speed Not suitable for robots
23 Principle of an AC Motor External electromagnets (EM) around a central rotor AC supply to EM Polarity change performs the task of mech. Switching Magnetic field of coils will appear to rotate Induces current in rotor (induction) or makes rotor to rotate (synchronous)
24 Specification & Characteristic Technical Specifications of AC Motor Brand ABB Manufacturer Part No Type Industrial 1-, 3-Phase Electric Motors Supply Voltage Vac 50 Hz Output Power Input Current Shaft Diameter Shaft Length Speed Rated Torque Torque Starting Height Length Width 180 W A 14 mm 30 mm 1370 rpm 1.3 Nm 1.3 Nm 150 mm 213 mm 120 mm
25 Features of an AC Motor Higher the frequency Fast speed Varying frequency to a number of robot axes has been impractical till recently Electromagnetism is used for regenerative braking (also for DC) Reduces deceleration time and overrun Motor speed cannot be predicted (same for DC) Extra arrangements required
26 Classification of an AC Motor Single-phase [Low-power requirements] Induction Synchronous Poly-phase (typically 3-phase) [Highpower requirements] Induction Synchronous Induction motors are cheaper Widely used
27 AC vs. DC Motors Cheaper, rugged, reliable, maintenance free Speed control is more complex Speed-controlled DC drive (stator voltage) is cheaper than speed-controlled AC drive (Variable Frequency Drive) Price of VFD is steadily reducing

28 Hydraulic Actuators Other fluid device Uses Mineral Oil [at Bars] An Application Scissor Jack
29 Advantages vs. Disadvantages Advantages High η + power-to-size ratio. Accurate control of speed/pos./dirn. Few backlash prob. Stiffness + incompressibility of fluid Large forces can be applied at locations.
30 Backlash Unwanted play in transmission components - Greater load carrying cap. - No mech. linkage Mech. simplicity. - Self lubricating Low wear + non-corro. - Due to 'storage' sudden demands can be met. - Capable of withstanding shock.
31 Disadvantages Leakages occur Loss in performance Higher fire risk. Power pack is (70 dba) Temp. change alters viscosity. Viscosity at temp. causes sluggishness. Servo-control is comples 70 dba Noise of heavy traffic
32 Pneumatic Actuators One of fluid devices Uses compressed air [1-7 bar; ~.1 MPa/bar] Components 1) Compressor; 2) After-cooler; 3) Storage tank; 4) Desiccant driers; 5) Filters; 6) Pressure regulators; 7) Lubricants; 8) Directional control valves; 9) Actuators
33 Advantages vs. Disadvantages Advantages Cheapest form of actuators. Components are readily available. Compressed air is available in factories. Compressed air can be stored, and conveyed easily over long distances. Compressed air is clean, explosion-proof & insensitive to temp. var. Many applns.
34 Few moving parts Reliable + low maint. costs Relevant personnel are familiar with the tech. Very quick Fast work cycles No mech. transmission is required. Safe in explosive areas as no elect. contact Systems are compact. Control is simple. Mechanical stops. Components are easy to connect.
35 Disadvantages Air is compressible. Precise control of speed/position is not easy. If no mechanical stops resetting is slow. Not suitable for heavy loads If moisture penetrates rusts occur. Compressibility of the air can be advantageous. Prevents damage due to overload.
36 Major Components Compressor: Compresses air After-cooler: Cools air after compression as hot air contains vapor Storage tank: Provides const. high press. Desiccant Drier: Air passes through chemicals to remove moisture Filters: Removes water droplet Pressure Regulator: Poppet valve


37 Pressure Regulators Poppet Valve <-- Check Valve


38 Directional Control Valves: Spool Valve Spool valve <-- Pilot operated spool valve

39 Actuators Actuators: Linear or Rotary Linear: Air is returned; Rotary: Air is exhausted to atm.
40 An Application Linear cylinder for rotation
41 Motor Selection For robot applications Positioning accuracy, reliability, speed of operation, cost, etc. Electric is clean + Capable of high precision Electronics is cheap but more heat Pneumatics are not for high precision for continuous path
42 Motor Selection (contd.) Hydraulics can generate more power in compact volume Capable of high torque + Rapid operations Power for electro-hydraulic valve is small but expensive All power can be from one powerful hydraulic pump located at distance
43 Thumb Rule for Motor Selection Rapid movement with high torques (> 3.5 kw): Hydraulic actuator < 1.5 kw (no fire hazard): Electric motors 1-5 kw: Availability or cost will determine the choice
44 Simple Calculation 2 m robot arm to lift 25 kg mass at 10 rpm Force = 25 x 9.81 = N Torque = x 2 = Nm Speed = 2π x 10/60 = rad/sec Power = Torque x Speed = kw Simple but sufficient for approximation
; η: Motor + Gear box")
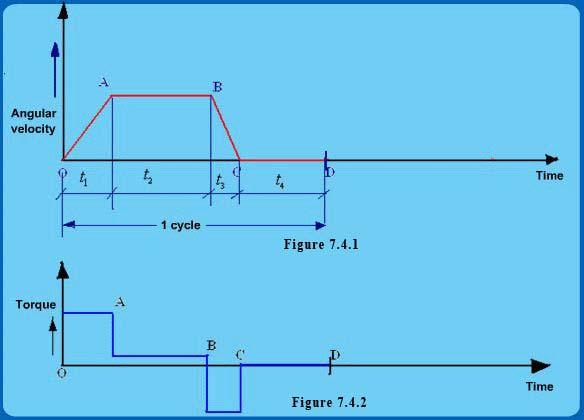
45 Practical Application Trapezoidal Trajectory Subscript l for load; m for motor; G = ω l /ω m (< 1); η: Motor + Gear box efficiency
46 Accelerations & Torques Ang. accn. during t 1 : Ang. accn. during t 2 : Zero (Const. Vel.) Ang. accn. during t 3 : Torque during t 1 : T 1 = Torque during t 2 : T 2 = Torque during t 3 : T 3 =
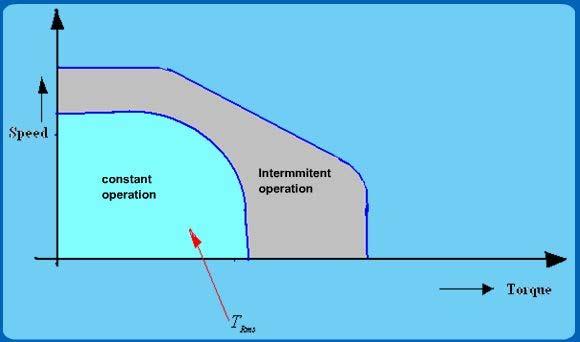
47 RMS Value
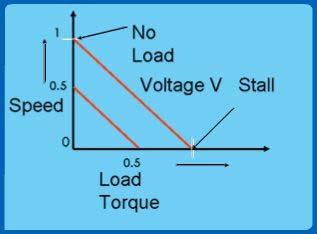
48 Motor Performance
49 Final Selection Peak speed and peak torque requirements, where T Peak is max of (magnitudes) T 1, T 2, and T 3 Use individual torque and RMS values + Performance curves provided by the manufacturer. Check heat generation + natural frequency of the drive.
50 Sensors: Purpose Sensors are like Eyes, Skin, Nose, Ears, and Tongue Terms like vision, tactile, etc. have cropped Gather information To function effectively During pick-n-place obstacles are to be avoided Fragile objects not to be broken End-effector, sensor, controller work together
51 Capabilities Simple Touch Presence/absence of an object Taction or Complex Touch Presence of an object Size and shape Simple Force Force along a single axis Complex Force Along 2 or more axes
52 Capabilities Proximity Non-contact detection Simple Vision Detects edges, holes, corners, etc. Complex Vision Recognize shapes Classification
53 Internal Sensors Used to measure the internal state of a robot Position Velocity Aceleration, etc Based on above info. control command is decided by controller
54 Position Sensors Measures position (angle) of each joint Joint angles End-effector configuration Encoder Digital optical device Converts motion Sequence of pulses Pulses can be converted to rel./abs. meas. Incremental or Absolute Linear and Rotary
55 Incremental Absolute Linear Encoders Transparent scale with opaque grating Equal grating line thickness, and gap, μm One side light source + condenser lens Other side light sensitive cells Cell resistance (photodiodes) decreases when light falls Pulse is generated Pulse (digital) is fed to controller
56 Incremental and Absolute Rotary Encoders Similar to incremental encoder Gratings are on circular disc Common value of transparent space width = 20 μm Two sets of grating lines on two different circles Detects the direction of motion Mounted on motor shaft or with some gearing (to enhance accuracy)
57 Potentiometer Also referred as pot Variable resistance device Expresses lin./ang. disp. in terms of voltage Consists of a wiper Makes contact with resistive element When pt. of contact moves Resistance betn. wiper & end leads change disp.
58 LVDT Linear Variable Differential Transformer Most used disp. transducer (?) when high accuracy is reqd. It generates AC signal. Magnitude is related to the moving core disp. Ferrous core moving a magnetic field Field is created similar to transformer A RVDT uses same principle
59 Synchros and Resolvers Encoders provide digital output Synchros/Reolvers give analog signal as output Consist of a rotor + stator: Must be converted to digital signal Single winding rotor inside fixed stators
60 Velocity Sensors All position sensors with certain time bounds Velocity = No. of pulses for an inc. encoder divided by time consumed in doing so This scheme puts some computational load on controller
61 Tachometer Finds speed directly without any computational load Based on Fleming s rule: Voltage produced Rate of change of flux linkage Voltage produced Speed of shaft rotation Info. to be digitized using ADC before passing it to the controller computer
62 Hall-Effect Sensor Flat piece of conductor material (called Hall chip) is attached to a potential diff., voltage across faces is zero If a magnetic field is imposed, voltage is generated With ring magnet on shaft, voltage speed of shaft
63 Acceleration Sensors Time-rate of change of velocities or double time-rate of change of positions Heavy computational load on the computer Not efficient Speed of robot operation will be hampered Alternate way: Measure force (F) = mass (m) x acceleration (a)
64 Acceleration Sensors Force can be measured using strain gauges F = ΔR A E /(R C) F: Force; ΔR: Change in resistance of strain gauge (SG); A: Area; E: Elastic modulus of SG material; R: Original resistance of SG; C: Deformation constant of SG Acceleration, a = ΔR A E /(R C m)
65 Differentiation vs. Integration Velocity and acceleration using a position sensor requires differentiation Not desired Any noise is amplified upon differentiation Velocity and position from acceleration require integration Recommended Integrators tend to suppress noise
66 Force Sensors A spring balance is a force sesnsor Force (weight) is applied on scale pan Displacement (spring stretches) Strain Gauge based, Piezoelectric, etc.
67 Strain Gauge Principle: Elongation of a conductor increases its resistance. Due to Increase in length Decrease in area Typical resistance Ω Made of electrical conductors (wire or foil etched on base material
68 Strain Gauge Glued on surfaces where strains are measured, R 1 and R 2 Resistances are measured by attaching them to the Wheatstone bridge circuit Cheap and accurate method Care should be taken for the temp. change To enhance output + temperature compensation 2 SGs are used
69 Piezoelectric Sensor Based on Piezoelectric effect When asymmetrical, elastic crystals are deformed by a force Electrical potential will be developed Reversible, i.e., if a potential is applied betn. the surfaces of the crystal, it will change physical dimension Magnitude and polarity of induced charges Magnitude and direction of applied force
70 Piezoelectric Sensor / Current-based Sensing Materials: Quartz, Tourmaline, Rochalle salt, and others 1 to 20 kn Used for instantaneous change in force (dynamic force) Current-based sensing: Uses the principle of electric motor, i.e., torque current drawn (motor characteristics are known)
71 Summary Advantages and disadvantages of various motors and actuators are explained. How to select an electric motor is shown. Purpose of sensors explained Classification of sensors is provided
72 Thank You M:
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
MECHATRONICS LAB MANUAL
 MECHATRONICS LAB MANUAL T.E.(Mechanical) Sem-VI Department of Mechanical Engineering SIESGST, Nerul, Navi Mumbai LIST OF EXPERIMENTS Expt. No. Title Page No. 1. Study of basic principles of sensing and
MECHATRONICS LAB MANUAL T.E.(Mechanical) Sem-VI Department of Mechanical Engineering SIESGST, Nerul, Navi Mumbai LIST OF EXPERIMENTS Expt. No. Title Page No. 1. Study of basic principles of sensing and
INTRODUCTION TO SENSORS, TRANSDUCERS & ACTUATORS
 INTRODUCTION Transducers play a major role in mechatronics engineering & technology. These are the basic elements that convert or transform one form of energy to another form. Let us change the word energy
INTRODUCTION Transducers play a major role in mechatronics engineering & technology. These are the basic elements that convert or transform one form of energy to another form. Let us change the word energy
Note 8. Electric Actuators
 Note 8 Electric Actuators Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 1 1. Introduction In a typical closed-loop, or feedback, control
Note 8 Electric Actuators Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 1 1. Introduction In a typical closed-loop, or feedback, control
Introduction: Drives in Manipulators. Module 3 : Actuators for robots. Lecture 7 : Actuators for Robots-Part I. Objectives
 Module 3 : Actuators for robots Lecture 7 : Actuators for Robots-Part I Objectives In this course you will learn about Commercial or industrial manipulator's capabilities. Typical electrical drives in
Module 3 : Actuators for robots Lecture 7 : Actuators for Robots-Part I Objectives In this course you will learn about Commercial or industrial manipulator's capabilities. Typical electrical drives in
AC Motors vs DC Motors. DC Motors. DC Motor Classification ... Prof. Dr. M. Zahurul Haq
 AC Motors vs DC Motors DC Motors Prof. Dr. M. Zahurul Haq http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of Engineering & Technology ME 6401: Advanced Mechatronics
AC Motors vs DC Motors DC Motors Prof. Dr. M. Zahurul Haq http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of Engineering & Technology ME 6401: Advanced Mechatronics
Application Note : Comparative Motor Technologies
 Application Note : Comparative Motor Technologies Air Motor and Cylinders Air Actuators use compressed air to move a piston for linear motion or turn a turbine for rotary motion. Responsiveness, speed
Application Note : Comparative Motor Technologies Air Motor and Cylinders Air Actuators use compressed air to move a piston for linear motion or turn a turbine for rotary motion. Responsiveness, speed
Actuators are the muscles of robots.
 6.1 INTRODUCTION Actuators are the muscles of robots. Several types of actuator noteworthy? Electric motors? Servomotors? Stepper motors? Direct-drive electric motors? Hydraulic actuators? Pneumatic actuators?
6.1 INTRODUCTION Actuators are the muscles of robots. Several types of actuator noteworthy? Electric motors? Servomotors? Stepper motors? Direct-drive electric motors? Hydraulic actuators? Pneumatic actuators?
QUESTION BANK SPECIAL ELECTRICAL MACHINES
 SEVENTH SEMESTER EEE QUESTION BANK SPECIAL ELECTRICAL MACHINES TWO MARK QUESTIONS 1. What is a synchronous reluctance 2. What are the types of rotor in synchronous reluctance 3. Mention some applications
SEVENTH SEMESTER EEE QUESTION BANK SPECIAL ELECTRICAL MACHINES TWO MARK QUESTIONS 1. What is a synchronous reluctance 2. What are the types of rotor in synchronous reluctance 3. Mention some applications
Lectures on Mechanics. Lesson#1
 Lectures on Mechanics Lesson#1 Francesco.becchi@telerobot.it LESSONS TIME TABLE (pls. take note) 28/11 h9/12- mech components 1 (3h) 4/12 h9/12 mech components 2 (3h) 11/12 h9/12 mech technologies (3h)
Lectures on Mechanics Lesson#1 Francesco.becchi@telerobot.it LESSONS TIME TABLE (pls. take note) 28/11 h9/12- mech components 1 (3h) 4/12 h9/12 mech components 2 (3h) 11/12 h9/12 mech technologies (3h)
Schedule of Events. Mech 1751: Introduction to Mechatronics. What is an actuator? Electric Actuators and Drives. Actuators. Dr. Stefan B.
 Schedule of Events Week Date Content Assignment Notes Mech 1751: Introduction to Mechatronics Actuators 1 2 3 4 5 6 7 8 9 09/3 16/3 23/3 30/3 6/4 20/4 27/4 4/5 11/5 Introduction Design Process System Modelling
Schedule of Events Week Date Content Assignment Notes Mech 1751: Introduction to Mechatronics Actuators 1 2 3 4 5 6 7 8 9 09/3 16/3 23/3 30/3 6/4 20/4 27/4 4/5 11/5 Introduction Design Process System Modelling
Lecture 3.3. Velocity, motion, force and pressure sensors
 1. Tachogenerator Lecture 3.3 Velocity, motion, force and pressure sensors Figure 2.4.1 Principle of working of Techogenerator[1] Tachogenerator works on the principle of variable reluctance. It consists
1. Tachogenerator Lecture 3.3 Velocity, motion, force and pressure sensors Figure 2.4.1 Principle of working of Techogenerator[1] Tachogenerator works on the principle of variable reluctance. It consists
MANTECH ELECTRONICS. Stepper Motors. Basics on Stepper Motors I. STEPPER MOTOR SYSTEMS OVERVIEW 2. STEPPING MOTORS
 MANTECH ELECTRONICS Stepper Motors Basics on Stepper Motors I. STEPPER MOTOR SYSTEMS OVERVIEW 2. STEPPING MOTORS TYPES OF STEPPING MOTORS 1. VARIABLE RELUCTANCE 2. PERMANENT MAGNET 3. HYBRID MOTOR WINDINGS
MANTECH ELECTRONICS Stepper Motors Basics on Stepper Motors I. STEPPER MOTOR SYSTEMS OVERVIEW 2. STEPPING MOTORS TYPES OF STEPPING MOTORS 1. VARIABLE RELUCTANCE 2. PERMANENT MAGNET 3. HYBRID MOTOR WINDINGS
2014 ELECTRICAL TECHNOLOGY
 SET - 1 II B. Tech I Semester Regular Examinations, March 2014 ELECTRICAL TECHNOLOGY (Com. to ECE, EIE, BME) Time: 3 hours Max. Marks: 75 Answer any FIVE Questions All Questions carry Equal Marks ~~~~~~~~~~~~~~~~~~~~~~~~~~
SET - 1 II B. Tech I Semester Regular Examinations, March 2014 ELECTRICAL TECHNOLOGY (Com. to ECE, EIE, BME) Time: 3 hours Max. Marks: 75 Answer any FIVE Questions All Questions carry Equal Marks ~~~~~~~~~~~~~~~~~~~~~~~~~~
Introduction. Introduction. Switched Reluctance Motors. Introduction
 UNIVERSITY OF TECHNOLOGY, SYDNEY FACULTY OF ENGINEERING 48550 Electrical Energy Technology Switched Reluctance Motors Topics to cover: 1. Introduction 2. Structures & Torque Production 3. Drive Circuits
UNIVERSITY OF TECHNOLOGY, SYDNEY FACULTY OF ENGINEERING 48550 Electrical Energy Technology Switched Reluctance Motors Topics to cover: 1. Introduction 2. Structures & Torque Production 3. Drive Circuits
Ch 4 Motor Control Devices
 Ch 4 Motor Control Devices Part 1 Manually Operated Switches 1. List three examples of primary motor control devices. (P 66) Answer: Motor contactor, starter, and controller or anything that control the
Ch 4 Motor Control Devices Part 1 Manually Operated Switches 1. List three examples of primary motor control devices. (P 66) Answer: Motor contactor, starter, and controller or anything that control the
General Purpose Permanent Magnet Motor Drive without Speed and Position Sensor
 General Purpose Permanent Magnet Motor Drive without Speed and Position Sensor Jun Kang, PhD Yaskawa Electric America, Inc. 1. Power consumption by electric motors Fig.1 Yaskawa V1000 Drive and a PM motor
General Purpose Permanent Magnet Motor Drive without Speed and Position Sensor Jun Kang, PhD Yaskawa Electric America, Inc. 1. Power consumption by electric motors Fig.1 Yaskawa V1000 Drive and a PM motor
COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK SUBJECT CODE & NAME : EE 1001 SPECIAL ELECTRICAL MACHINES
 KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK SUBJECT CODE & NAME : EE 1001 SPECIAL ELECTRICAL MACHINES YEAR / SEM : IV / VII UNIT I SYNCHRONOUS RELUCTANCE
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK SUBJECT CODE & NAME : EE 1001 SPECIAL ELECTRICAL MACHINES YEAR / SEM : IV / VII UNIT I SYNCHRONOUS RELUCTANCE
2. Draw the speed-torque characteristics of dc shunt motor and series motor. (May2013) (May 2014)
 (May 2014)") UNIT 2 - DRIVE MOTOR CHARACTERISTICS PART A 1. What is meant by mechanical characteristics? A curve is drawn between speed-torque. This characteristic is called mechanical characteristics. 2. Draw the
UNIT 2 - DRIVE MOTOR CHARACTERISTICS PART A 1. What is meant by mechanical characteristics? A curve is drawn between speed-torque. This characteristic is called mechanical characteristics. 2. Draw the
2
 Brushless DC motors 2 3 VFD VS ECM(PM Motors) Both take AC and convert to DC VFD is generally 3Ø ECM 1Ø in 3Ø out VFD & ECM Both have Rectifiers VFD & ECM both have transistor outputs VFD Out put
Brushless DC motors 2 3 VFD VS ECM(PM Motors) Both take AC and convert to DC VFD is generally 3Ø ECM 1Ø in 3Ø out VFD & ECM Both have Rectifiers VFD & ECM both have transistor outputs VFD Out put
LIMITED ANGLE TORQUE MOTORS
 LIMITED ANGLE TORQUE MOTORS Limited Angle Torque Motors H2W Technologies Limited Angle Torque Motors are ideal for compact, limited angular excursion (
LIMITED ANGLE TORQUE MOTORS Limited Angle Torque Motors H2W Technologies Limited Angle Torque Motors are ideal for compact, limited angular excursion (
MAGNETIC EFFECTS OF ELECTRIC CURRENT
 MAGNETIC EFFECTS OF ELECTRIC CURRENT It is observed that when a compass is brought near a current carrying conductor the needle of compass gets deflected because of flow of electricity. This shows that
MAGNETIC EFFECTS OF ELECTRIC CURRENT It is observed that when a compass is brought near a current carrying conductor the needle of compass gets deflected because of flow of electricity. This shows that
Contents. Pressure measurement technology Pressure calibrators 18 Exercises 19-20
 1 Pressure Contents Topics: Slide No: Pressure measurement technology 03-17 Pressure calibrators 18 Exercises 19-20 2 Pressure Gauges Barometer Used to measure Barometric Pressure Reference is 0 psia,
1 Pressure Contents Topics: Slide No: Pressure measurement technology 03-17 Pressure calibrators 18 Exercises 19-20 2 Pressure Gauges Barometer Used to measure Barometric Pressure Reference is 0 psia,
EEE3441 Electrical Machines Department of Electrical Engineering. Lecture. Introduction to Electrical Machines
 Department of Electrical Engineering Lecture Introduction to Electrical Machines 1 In this Lecture Induction motors and synchronous machines are introduced Production of rotating magnetic field Three-phase
Department of Electrical Engineering Lecture Introduction to Electrical Machines 1 In this Lecture Induction motors and synchronous machines are introduced Production of rotating magnetic field Three-phase
Application Information
 Moog Components Group manufactures a comprehensive line of brush-type and brushless motors, as well as brushless controllers. The purpose of this document is to provide a guide for the selection and application
Moog Components Group manufactures a comprehensive line of brush-type and brushless motors, as well as brushless controllers. The purpose of this document is to provide a guide for the selection and application
Question Bank ( ODD)
") Programme : B.E Question Bank (2016-2017ODD) Subject Semester / Branch : EE 6703 SPECIAL ELECTRICAL MACHINES : VII-EEE UNIT - 1 PART A 1. List the applications of synchronous reluctance motors. 2. Draw
Programme : B.E Question Bank (2016-2017ODD) Subject Semester / Branch : EE 6703 SPECIAL ELECTRICAL MACHINES : VII-EEE UNIT - 1 PART A 1. List the applications of synchronous reluctance motors. 2. Draw
Lectures on mechanics
 Lectures on mechanics (lesson #3) francesco.becchi@telerobot.it LESSONS TIME TABLE (pls. take note) 28/11 h9/12- mech components 1 (3h) 4/12 h9/12 mech components 2 (3h) 11/12 h9/12 mech technologies (3h)
Lectures on mechanics (lesson #3) francesco.becchi@telerobot.it LESSONS TIME TABLE (pls. take note) 28/11 h9/12- mech components 1 (3h) 4/12 h9/12 mech components 2 (3h) 11/12 h9/12 mech technologies (3h)
ESO 210 Introduction to Electrical Engineering
 ESO 210 Introduction to Electrical Engineering Lectures-37 Polyphase (3-phase) Induction Motor 2 Determination of Induction Machine Parameters Three tests are needed to determine the parameters in an induction
ESO 210 Introduction to Electrical Engineering Lectures-37 Polyphase (3-phase) Induction Motor 2 Determination of Induction Machine Parameters Three tests are needed to determine the parameters in an induction
SSC-JE STAFF SELECTION COMMISSION ELECTRICAL ENGINEERING STUDY MATERIAL ELECTRICAL MACHINES
 1 SSC-JE STAFF SELECTION COMMISSION ELECTRICAL ENGINEERING STUDY MATERIAL 28-B/7, Jia Sarai, Near IIT, Hauz Khas, New Delhi-110016. Ph. 011-26514888. www.engineersinstitute.com 2 CONTENT 1. : DC MACHINE,
1 SSC-JE STAFF SELECTION COMMISSION ELECTRICAL ENGINEERING STUDY MATERIAL 28-B/7, Jia Sarai, Near IIT, Hauz Khas, New Delhi-110016. Ph. 011-26514888. www.engineersinstitute.com 2 CONTENT 1. : DC MACHINE,
IT 318 SUPPLEMENTARY MATERIAL CHAPTER 4
 IT 318 SUPPLEMENTARY MATERIAL CHAPTER 4 Electric Motors V. 2013 BARRY M. LUNT Brigham Young University Table of Contents Chapter 4: Electric Motors... 2 Overview... 2 4-1 Commutation... 2 4-2 Stepper Motors...
IT 318 SUPPLEMENTARY MATERIAL CHAPTER 4 Electric Motors V. 2013 BARRY M. LUNT Brigham Young University Table of Contents Chapter 4: Electric Motors... 2 Overview... 2 4-1 Commutation... 2 4-2 Stepper Motors...
Synchronous Motor Drives
 UNIT V SYNCHRONOUS MOTOR DRIVES 5.1 Introduction Synchronous motor is an AC motor which rotates at synchronous speed at all loads. Construction of the stator of synchronous motor is similar to the stator
UNIT V SYNCHRONOUS MOTOR DRIVES 5.1 Introduction Synchronous motor is an AC motor which rotates at synchronous speed at all loads. Construction of the stator of synchronous motor is similar to the stator
Direct Drive Rotary An Increasingly Attractive Servo Choice
 Direct Drive Rotary An Increasingly Attractive Servo Choice DDR systems are available in frameless, housed and the newly developed Cartridge motor format. While many engineers are familiar with the basics
Direct Drive Rotary An Increasingly Attractive Servo Choice DDR systems are available in frameless, housed and the newly developed Cartridge motor format. While many engineers are familiar with the basics
Technical Explanation for Inverters
 CSM_Inverter_TG_E_1_2 Introduction What Is an Inverter? An inverter controls the frequency of power supplied to an AC motor to control the rotation speed of the motor. Without an inverter, the AC motor
CSM_Inverter_TG_E_1_2 Introduction What Is an Inverter? An inverter controls the frequency of power supplied to an AC motor to control the rotation speed of the motor. Without an inverter, the AC motor
The Advantages of Linear Direct Drives
 Linear Direct Drives High throughput, high precision, and maintenance-free: Linear direct drives from Kollmorgen set the standard for performance and effectiveness. These are brushless 3-phase servo motors
Linear Direct Drives High throughput, high precision, and maintenance-free: Linear direct drives from Kollmorgen set the standard for performance and effectiveness. These are brushless 3-phase servo motors
Special-Purpose Electric Machines
 Special-Purpose Electric Machines The machines introduced in this lecture are used in many applications requiring fractional horsepower, or the ability to accurately control position, velocity or torque.
Special-Purpose Electric Machines The machines introduced in this lecture are used in many applications requiring fractional horsepower, or the ability to accurately control position, velocity or torque.
CHAPTER THREE DC MOTOR OVERVIEW AND MATHEMATICAL MODEL
 CHAPTER THREE DC MOTOR OVERVIEW AND MATHEMATICAL MODEL 3.1 Introduction Almost every mechanical movement that we see around us is accomplished by an electric motor. Electric machines are a means of converting
CHAPTER THREE DC MOTOR OVERVIEW AND MATHEMATICAL MODEL 3.1 Introduction Almost every mechanical movement that we see around us is accomplished by an electric motor. Electric machines are a means of converting
EMaSM. Principles Of Sensors & transducers
 EMaSM Principles Of Sensors & transducers Introduction: At the heart of measurement of common physical parameters such as force and pressure are sensors and transducers. These devices respond to the parameters
EMaSM Principles Of Sensors & transducers Introduction: At the heart of measurement of common physical parameters such as force and pressure are sensors and transducers. These devices respond to the parameters
CHAPTER 6 INTRODUCTION TO MOTORS AND GENERATORS
 CHAPTER 6 INTRODUCTION TO MOTORS AND GENERATORS Objective Describe the necessary conditions for motor and generator operation. Calculate the force on a conductor carrying current in the presence of the
CHAPTER 6 INTRODUCTION TO MOTORS AND GENERATORS Objective Describe the necessary conditions for motor and generator operation. Calculate the force on a conductor carrying current in the presence of the
1.1 Block Diagram of Drive Components of Electric Drive & their functions. Power Processor / Modulator. Control. Unit
 Introduction Motion control is required in large number of industrial and domestic applications like transportations, rolling mills, textile machines, fans, paper machines, pumps, washing machines, robots
Introduction Motion control is required in large number of industrial and domestic applications like transportations, rolling mills, textile machines, fans, paper machines, pumps, washing machines, robots
MOTOR TERMINAL CONNECTIONS
 MOTOR TERMINAL CONNECTIONS Motor Classification Most of the industrial machines in use today are driven by electric motors Motors are classified according to the type of power used (AC or DC) and the motors
MOTOR TERMINAL CONNECTIONS Motor Classification Most of the industrial machines in use today are driven by electric motors Motors are classified according to the type of power used (AC or DC) and the motors
DEPARTMENT OF EI ELECTRICAL MACHINE ASSIGNMENT 1
 It is the mark of an educated mind to be able to entertain a thought without accepting it. DEPARTMENT OF EI ELECTRICAL MACHINE ASSIGNMENT 1 1. Explain the Basic concepts of rotating machine. 2. With help
It is the mark of an educated mind to be able to entertain a thought without accepting it. DEPARTMENT OF EI ELECTRICAL MACHINE ASSIGNMENT 1 1. Explain the Basic concepts of rotating machine. 2. With help
DHANALAKSHMI SRINIVASAN COLLEGE OF ENGINEERING AND TECHNOLOGY MAMALLAPURAM, CHENNAI
 DHANALAKSHMI SRINIVASAN COLLEGE OF ENGINEERING AND TECHNOLOGY MAMALLAPURAM, CHENNAI -603104 DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK VII SEMESTER EE6501-Power system Analysis
DHANALAKSHMI SRINIVASAN COLLEGE OF ENGINEERING AND TECHNOLOGY MAMALLAPURAM, CHENNAI -603104 DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK VII SEMESTER EE6501-Power system Analysis
Modern Motor Control Applications and Trends Tomas Krecek, Ondrej Picha, Steffen Moehrer. Public Information
 Modern Motor Control Applications and Trends Tomas Krecek, Ondrej Picha, Steffen Moehrer Content Introduction Electric Machines Basic and Advance Control Techniques Power Inverters and Semiconductor Requirements
Modern Motor Control Applications and Trends Tomas Krecek, Ondrej Picha, Steffen Moehrer Content Introduction Electric Machines Basic and Advance Control Techniques Power Inverters and Semiconductor Requirements
UNIT-2 ROBOT DRIVE SYSTEMS AND END EFFECTORS
 UNIT-2 ROBOT DRIVE SYSTEMS AND END EFFECTORS CONTENTS 2.1 Pneumatic Drives 2.2 Hydraulic Drives 2.3 Mechanical Drives 2.4 Electrical Drives 2.5 D.C. Servo Motors 2.6 Stepper Motor 2.7 A.C. Servo Motors
UNIT-2 ROBOT DRIVE SYSTEMS AND END EFFECTORS CONTENTS 2.1 Pneumatic Drives 2.2 Hydraulic Drives 2.3 Mechanical Drives 2.4 Electrical Drives 2.5 D.C. Servo Motors 2.6 Stepper Motor 2.7 A.C. Servo Motors
The Latest Sensor Trends
 Sensing & Feedback Technologies The Latest Sensor Trends Agenda Miniature sensors open up new applications Alternatives to Fiber optics Pneumatic cylinder sensing: Dual systems, analog and lifetime warranties
Sensing & Feedback Technologies The Latest Sensor Trends Agenda Miniature sensors open up new applications Alternatives to Fiber optics Pneumatic cylinder sensing: Dual systems, analog and lifetime warranties
CHAPTER 3 DESIGN OF THE LIMITED ANGLE BRUSHLESS TORQUE MOTOR
 33 CHAPTER 3 DESIGN OF THE LIMITED ANGLE BRUSHLESS TORQUE MOTOR 3.1 INTRODUCTION This chapter presents the design of frameless Limited Angle Brushless Torque motor. The armature is wound with toroidal
33 CHAPTER 3 DESIGN OF THE LIMITED ANGLE BRUSHLESS TORQUE MOTOR 3.1 INTRODUCTION This chapter presents the design of frameless Limited Angle Brushless Torque motor. The armature is wound with toroidal
CHAPTER 4 MODELING OF PERMANENT MAGNET SYNCHRONOUS GENERATOR BASED WIND ENERGY CONVERSION SYSTEM
 47 CHAPTER 4 MODELING OF PERMANENT MAGNET SYNCHRONOUS GENERATOR BASED WIND ENERGY CONVERSION SYSTEM 4.1 INTRODUCTION Wind energy has been the subject of much recent research and development. The only negative
47 CHAPTER 4 MODELING OF PERMANENT MAGNET SYNCHRONOUS GENERATOR BASED WIND ENERGY CONVERSION SYSTEM 4.1 INTRODUCTION Wind energy has been the subject of much recent research and development. The only negative
Positioning Systems. Torque Motor Rotary Tables Product Overview and Application Areas
 62 M99TE5-15 5.1 Product Overview and Application Areas The extremely rigid connection between motor and load, and a servo-drive regulation ensures excellent acceleration capabilities and good uniformity
62 M99TE5-15 5.1 Product Overview and Application Areas The extremely rigid connection between motor and load, and a servo-drive regulation ensures excellent acceleration capabilities and good uniformity
INTRODUCTION Principle
 DC Generators INTRODUCTION A generator is a machine that converts mechanical energy into electrical energy by using the principle of magnetic induction. Principle Whenever a conductor is moved within a
DC Generators INTRODUCTION A generator is a machine that converts mechanical energy into electrical energy by using the principle of magnetic induction. Principle Whenever a conductor is moved within a
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Force/Torque Sensors Force/Torque Sensors http://robotiq.com/products/robotics-force-torque-sensor/ 3 Force/Torque Sensors Many Force/Torque (FT)
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Force/Torque Sensors Force/Torque Sensors http://robotiq.com/products/robotics-force-torque-sensor/ 3 Force/Torque Sensors Many Force/Torque (FT)
Electromagnetic actuation. technologies. Prof Phil Mellor
 Electromagnetic actuation technologies Prof Phil Mellor Department of Electrical and Electronic Engineering 2 Overview Review developments in electromagnetic actuation More electric aircraft Our research
Electromagnetic actuation technologies Prof Phil Mellor Department of Electrical and Electronic Engineering 2 Overview Review developments in electromagnetic actuation More electric aircraft Our research
Institute of Technology, Nirma University B. Tech. Sem. V: Electrical Engineering 2EE305: ELECTRICAL MACHINES II. Handout: AC Commutator Motors
 Institute of Technology, Nirma University B. Tech. Sem. V: Electrical Engineering 2EE305: ELECTRICAL MACHINES II Handout: AC Commutator Motors Prepared by: Prof. T. H. Panchal Learning Objective: Introduction
Institute of Technology, Nirma University B. Tech. Sem. V: Electrical Engineering 2EE305: ELECTRICAL MACHINES II Handout: AC Commutator Motors Prepared by: Prof. T. H. Panchal Learning Objective: Introduction
UNIT 2. INTRODUCTION TO DC GENERATOR (Part 1) OBJECTIVES. General Objective
 OBJECTIVES. General Objective") DC GENERATOR (Part 1) E2063/ Unit 2/ 1 UNIT 2 INTRODUCTION TO DC GENERATOR (Part 1) OBJECTIVES General Objective : To apply the basic principle of DC generator, construction principle and types of DC generator.
DC GENERATOR (Part 1) E2063/ Unit 2/ 1 UNIT 2 INTRODUCTION TO DC GENERATOR (Part 1) OBJECTIVES General Objective : To apply the basic principle of DC generator, construction principle and types of DC generator.
Module 4 Drives and Mechanisms Lecture 1 Elements of CNC machine tools: electric motors
 Module 4 Drives and Mechanisms Lecture 1 Elements of CNC machine tools: electric motors 1. Drives Basic function of a CNC machine is to provide automatic and precise motion control to its elements such
Module 4 Drives and Mechanisms Lecture 1 Elements of CNC machine tools: electric motors 1. Drives Basic function of a CNC machine is to provide automatic and precise motion control to its elements such
Input, Control and Processing elements
 PNEUMATIC & HYDRAULIC SYSTEMS CHAPTER FIVE Input, Control and Processing elements Dr. Ibrahim Naimi Valves The function of valves is to control the fluid path or the pressure or the flow rate. Depending
PNEUMATIC & HYDRAULIC SYSTEMS CHAPTER FIVE Input, Control and Processing elements Dr. Ibrahim Naimi Valves The function of valves is to control the fluid path or the pressure or the flow rate. Depending
PAS Series AC Servo Motor. Datasheet
 PAS Series AC Servo Motor Datasheet Version PAS 2013 01 http://www.primopal.com Description PrimoPal offers a wide selection of high performance brushless AC servo motors, with power ratings from 200 W
PAS Series AC Servo Motor Datasheet Version PAS 2013 01 http://www.primopal.com Description PrimoPal offers a wide selection of high performance brushless AC servo motors, with power ratings from 200 W
COMPARING SLOTTED vs. SLOTLESS BRUSHLESS DC MOTORS
 COMPARING SLOTTED vs. SLOTLESS Authored By: Engineering Team Members Pittman Motors Slotless brushless DC motors represent a unique and compelling subset of motors within the larger category of brushless
COMPARING SLOTTED vs. SLOTLESS Authored By: Engineering Team Members Pittman Motors Slotless brushless DC motors represent a unique and compelling subset of motors within the larger category of brushless
Renewable Energy Systems 13
 Renewable Energy Systems 13 Buchla, Kissell, Floyd Chapter Outline Generators 13 Buchla, Kissell, Floyd 13-1 MAGNETISM AND ELECTROMAGNETISM 13-2 DC GENERATORS 13-3 AC SYNCHRONOUS GENERATORS 13-4 AC INDUCTION
Renewable Energy Systems 13 Buchla, Kissell, Floyd Chapter Outline Generators 13 Buchla, Kissell, Floyd 13-1 MAGNETISM AND ELECTROMAGNETISM 13-2 DC GENERATORS 13-3 AC SYNCHRONOUS GENERATORS 13-4 AC INDUCTION
Inverter control of low speed Linear Induction Motors
 Inverter control of low speed Linear Induction Motors Stephen Colyer, Jeff Proverbs, Alan Foster Force Engineering Ltd, Old Station Close, Shepshed, UK Tel: +44(0)1509 506 025 Fax: +44(0)1509 505 433 e-mail:
Inverter control of low speed Linear Induction Motors Stephen Colyer, Jeff Proverbs, Alan Foster Force Engineering Ltd, Old Station Close, Shepshed, UK Tel: +44(0)1509 506 025 Fax: +44(0)1509 505 433 e-mail:
Stopping Accuracy of Brushless
 Stopping Accuracy of Brushless Features of the High Rigidity Type DGII Series Hollow Rotary Actuator The DGII Series hollow rotary actuator was developed for positioning applications such as rotating a
Stopping Accuracy of Brushless Features of the High Rigidity Type DGII Series Hollow Rotary Actuator The DGII Series hollow rotary actuator was developed for positioning applications such as rotating a
AE105 PRINCIPLES OF ELECTRICAL ENGINEERING JUNE 2014
 Q.2 a. Explain in detail eddy current losses in a magnetic material. Explain the factors on which it depends. How it can be reduced? IETE 1 b. A magnetic circuit with a single air gap is shown in given
Q.2 a. Explain in detail eddy current losses in a magnetic material. Explain the factors on which it depends. How it can be reduced? IETE 1 b. A magnetic circuit with a single air gap is shown in given
Page 1. Design meeting 18/03/2008. By Mohamed KOUJILI
 Page 1 Design meeting 18/03/2008 By Mohamed KOUJILI I. INTRODUCTION II. III. IV. CONSTRUCTION AND OPERATING PRINCIPLE 1. Stator 2. Rotor 3. Hall sensor 4. Theory of operation TORQUE/SPEED CHARACTERISTICS
Page 1 Design meeting 18/03/2008 By Mohamed KOUJILI I. INTRODUCTION II. III. IV. CONSTRUCTION AND OPERATING PRINCIPLE 1. Stator 2. Rotor 3. Hall sensor 4. Theory of operation TORQUE/SPEED CHARACTERISTICS
J.D ENGINEERING WORKS
 P O W E R G E N E R A T I O N About Us J. Engineering works, Manufacture Permanent Magnet Generators, AC Alternators,BLC MOTORS, Electric Motors, PMG Wind & Hydro Turbine. Mr. Gurdavinder Singh, Founder
P O W E R G E N E R A T I O N About Us J. Engineering works, Manufacture Permanent Magnet Generators, AC Alternators,BLC MOTORS, Electric Motors, PMG Wind & Hydro Turbine. Mr. Gurdavinder Singh, Founder
SELECTING A BRUSH-COMMUTATED DC MOTOR
 SELECTING A BRUSH-COMMUTATED DC MOTOR BASIC PARAMETERS Permanent magnet direct current (DC) motors convert electrical energy into mechanical energy through the interaction of two magnetic fields. One field
SELECTING A BRUSH-COMMUTATED DC MOTOR BASIC PARAMETERS Permanent magnet direct current (DC) motors convert electrical energy into mechanical energy through the interaction of two magnetic fields. One field
DC CIRCUITS ELECTROMAGNETISM
 DC CIRCUITS 1. State and Explain Ohm s Law. Write in brief about the limitations of Ohm s Law. 2. State and explain Kirchhoff s laws. 3. Write in brief about disadvantages of series circuit and advantages
DC CIRCUITS 1. State and Explain Ohm s Law. Write in brief about the limitations of Ohm s Law. 2. State and explain Kirchhoff s laws. 3. Write in brief about disadvantages of series circuit and advantages
ServoRings TM - integrated rotary tables with high torque servo ring motor, high resolution ring encoder and high accuracy ring bearing
 ServoRings TM - integrated rotary tables with high torque servo ring motor, high resolution ring encoder and high accuracy ring bearing Operating principle ServoRing TM rotary tables use segmented three
ServoRings TM - integrated rotary tables with high torque servo ring motor, high resolution ring encoder and high accuracy ring bearing Operating principle ServoRing TM rotary tables use segmented three
COMPARISON OF PERFORMANCE FEATURES
 SERVODISC CATALOG A new dimension in performance If you are involved with high performance servomotor applications, there is an important motor technology which you should know about. It s the technology
SERVODISC CATALOG A new dimension in performance If you are involved with high performance servomotor applications, there is an important motor technology which you should know about. It s the technology
The Fleming s Left Hand Rule shows what happens when electrons in a current enter a magnetic field.
 M4: Electrical Actuators M4.1 Fleming s Left Hand Rule The Fleming s Left Hand Rule shows what happens when electrons in a current enter a magnetic field. According to this rule if the index finger is
M4: Electrical Actuators M4.1 Fleming s Left Hand Rule The Fleming s Left Hand Rule shows what happens when electrons in a current enter a magnetic field. According to this rule if the index finger is
STI LVDT Displacement Sensors
 STI LVDT Displacement Sensors The LVDT Still the most reliable and widely used displacement transducer available today. The best performance to cost ratio of any of its rival products in today s market.
STI LVDT Displacement Sensors The LVDT Still the most reliable and widely used displacement transducer available today. The best performance to cost ratio of any of its rival products in today s market.
AC Servo Motors and Servo Rated Gearheads
 AC Servo Motors and Servo Rated Gearheads for the automation industry Brushless Servo Motors 2 AC Servo Motors Baldor has been leading the way in energy efficient industrial motors since the 192 s. Baldor
AC Servo Motors and Servo Rated Gearheads for the automation industry Brushless Servo Motors 2 AC Servo Motors Baldor has been leading the way in energy efficient industrial motors since the 192 s. Baldor
Electrical Machines II. Week 5-6: Induction Motor Construction, theory of operation, rotating magnetic field and equivalent circuit
 Electrical Machines II Week 5-6: Induction Motor Construction, theory of operation, rotating magnetic field and equivalent circuit Asynchronous (Induction) Motor: industrial construction Two types of induction
Electrical Machines II Week 5-6: Induction Motor Construction, theory of operation, rotating magnetic field and equivalent circuit Asynchronous (Induction) Motor: industrial construction Two types of induction
Load Cell for Manually Operated Presses Model 8451
 w Technical Product Information Load Cell for Manually Operated Presses 1. Introduction... 2 2. Preparing for use... 2 2.1 Unpacking... 2 2.2 Using the instrument for the first time... 2 2.3 Grounding
w Technical Product Information Load Cell for Manually Operated Presses 1. Introduction... 2 2. Preparing for use... 2 2.1 Unpacking... 2 2.2 Using the instrument for the first time... 2 2.3 Grounding
Hybrid Stepper Motors
 DINGS Electrical & Mechanical Co., Ltd 3 Quality Performance Flexibility Price WHO IS DINGS? DINGS is a premier supplier of rotary and linear step motors. Based in the greater Shanghai, China area, we
DINGS Electrical & Mechanical Co., Ltd 3 Quality Performance Flexibility Price WHO IS DINGS? DINGS is a premier supplier of rotary and linear step motors. Based in the greater Shanghai, China area, we
OUTLINE (MOTORS) STEPPING MOTORS. COPAL ELECTRONICS handles motors marked by the. Induction motors. A C motors. Inductor synchronous motors.
 STEPPING MOTORS. COPAL ELECTRONICS handles motors marked by the. Induction motors. A C motors. Inductor synchronous motors.") OUTLINE (MOTORS) OPL ELETRIS handles motors marked by the motors Induction motors Induction motors make use of the rotation of a basket placed in a rotating magnetic field. Three phase is used to produce
OUTLINE (MOTORS) OPL ELETRIS handles motors marked by the motors Induction motors Induction motors make use of the rotation of a basket placed in a rotating magnetic field. Three phase is used to produce
CHAPTER 3 BRUSHLESS DC MOTOR
 53 CHAPTER 3 BRUSHLESS DC MOTOR 3.1 INTRODUCTION The application of motors has spread to all kinds of fields. In order to adopt different applications, various types of motors such as DC motors, induction
53 CHAPTER 3 BRUSHLESS DC MOTOR 3.1 INTRODUCTION The application of motors has spread to all kinds of fields. In order to adopt different applications, various types of motors such as DC motors, induction
A Practical Primer On Motor Drives (Part 11): AC And DC Motor Types
: AC And DC Motor Types") A Practical Primer On Motor Drives (Part 11): AC And DC Motor Types by Ken Johnson, Teledyne LeCroy, Chestnut Ridge, N.Y. ISSUE: December 2016 In the previous part in this series, the basic principles
A Practical Primer On Motor Drives (Part 11): AC And DC Motor Types by Ken Johnson, Teledyne LeCroy, Chestnut Ridge, N.Y. ISSUE: December 2016 In the previous part in this series, the basic principles
CHAPTER 13 MAGNETIC EFFECTS OF ELECTRIC CURRENT
 CHAPTER 13 MAGNETIC EFFECTS OF ELECTRIC CURRENT Compass needle:- It is a small bar magnet, whose north end is pointing towards north pole and south end is pointing towards south pole of earth..hans Oersted
CHAPTER 13 MAGNETIC EFFECTS OF ELECTRIC CURRENT Compass needle:- It is a small bar magnet, whose north end is pointing towards north pole and south end is pointing towards south pole of earth..hans Oersted
PHY 152 (ELECTRICITY AND MAGNETISM)
") PHY 152 (ELECTRICITY AND MAGNETISM) ELECTRIC MOTORS (AC & DC) ELECTRIC GENERATORS (AC & DC) AIMS Students should be able to Describe the principle of magnetic induction as it applies to DC and AC generators.
PHY 152 (ELECTRICITY AND MAGNETISM) ELECTRIC MOTORS (AC & DC) ELECTRIC GENERATORS (AC & DC) AIMS Students should be able to Describe the principle of magnetic induction as it applies to DC and AC generators.
Servo and Proportional Valves
 Servo and Proportional Valves Servo and proportional valves are used to precisely control the position or speed of an actuator. The valves are different internally but perform the same function. A servo
Servo and Proportional Valves Servo and proportional valves are used to precisely control the position or speed of an actuator. The valves are different internally but perform the same function. A servo
TORQUE-MOTORS. as Actuators in Intake and Exhaust System. SONCEBOZ Rue Rosselet-Challandes 5 CH-2605 Sonceboz.
 TORQUE-MOTORS as Actuators in Intake and Exhaust System SONCEBOZ Rue Rosselet-Challandes 5 CH-2605 Sonceboz Tel.: +41 / 32-488 11 11 Fax: +41 / 32-488 11 00 info@sonceboz.com www.sonceboz.com as Actuators
TORQUE-MOTORS as Actuators in Intake and Exhaust System SONCEBOZ Rue Rosselet-Challandes 5 CH-2605 Sonceboz Tel.: +41 / 32-488 11 11 Fax: +41 / 32-488 11 00 info@sonceboz.com www.sonceboz.com as Actuators
Step Motor. Mechatronics Device Report Yisheng Zhang 04/02/03. What Is A Step Motor?
 Step Motor What is a Step Motor? How Do They Work? Basic Types: Variable Reluctance, Permanent Magnet, Hybrid Where Are They Used? How Are They Controlled? How To Select A Step Motor and Driver Types of
Step Motor What is a Step Motor? How Do They Work? Basic Types: Variable Reluctance, Permanent Magnet, Hybrid Where Are They Used? How Are They Controlled? How To Select A Step Motor and Driver Types of
Weatherproof Tubular Slip Ring Assembly
 Weatherproof Tubular Slip Ring Assembly Model B8-4.3W 8 circuit weatherproof slip ring Compact design Mounts on shafts up to 4.3 [109.2 mm] in diameter Permanently lubricated bearings Rugged stainless
Weatherproof Tubular Slip Ring Assembly Model B8-4.3W 8 circuit weatherproof slip ring Compact design Mounts on shafts up to 4.3 [109.2 mm] in diameter Permanently lubricated bearings Rugged stainless
Electrical System Design
 Electrical System Design UNIT 4 Stepper Motors What is Stepper Motor Stepper motor is a special type of electric motor that moves in precisely defined increments of rotor position(steps). A stepper motor
Electrical System Design UNIT 4 Stepper Motors What is Stepper Motor Stepper motor is a special type of electric motor that moves in precisely defined increments of rotor position(steps). A stepper motor
Figure 1: Forces Are Equal When Both Their Magnitudes and Directions Are the Same
 Moving and Maneuvering 1 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and
Moving and Maneuvering 1 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and
B.E-EEE(Marine) Batch 7. Subject Code EE1704 Subject Name Special Electrical Machines
 Batch 7. Subject Code EE1704 Subject Name Special Electrical Machines") Course B.E-EEE(Marine) Batch 7 Semester VII Subject Code EE1704 Subject Name Special Electrical Machines Part-A Unit-1 1 List the applications of synchronous reluctance motors. 2 Draw the voltage and torque
Course B.E-EEE(Marine) Batch 7 Semester VII Subject Code EE1704 Subject Name Special Electrical Machines Part-A Unit-1 1 List the applications of synchronous reluctance motors. 2 Draw the voltage and torque
2006 MINI Cooper S GENINFO Starting - Overview - MINI
 MINI STARTING SYSTEM * PLEASE READ THIS FIRST * 2002-07 GENINFO Starting - Overview - MINI For information on starter removal and installation, see the following articles. For Cooper, see STARTER WITH
MINI STARTING SYSTEM * PLEASE READ THIS FIRST * 2002-07 GENINFO Starting - Overview - MINI For information on starter removal and installation, see the following articles. For Cooper, see STARTER WITH
EE6351 ELECTRIC DRIVES AND CONTROL UNIT-1 INTRODUTION
 EE6351 ELECTRIC DRIVES AND CONTROL UNIT-1 INTRODUTION 1. What is meant by drive and electric drive? Machines employed for motion control are called drives and may employ any one of the prime movers for
EE6351 ELECTRIC DRIVES AND CONTROL UNIT-1 INTRODUTION 1. What is meant by drive and electric drive? Machines employed for motion control are called drives and may employ any one of the prime movers for
HYBRID LINEAR ACTUATORS BASICS
 HYBRID LINEAR ACTUATORS BASICS TECHNICAL OVERVIEW Converting the rotary motion of a stepping motor into linear motion can be accomplished by several mechanical means, including rack and pinion, belts and
HYBRID LINEAR ACTUATORS BASICS TECHNICAL OVERVIEW Converting the rotary motion of a stepping motor into linear motion can be accomplished by several mechanical means, including rack and pinion, belts and
Silencer Series Brushless DC Motors
 TYPICAL APPLICATIONS Medical equipment - pumps, blowers and electric scooters and wheelchairs Automatic door and window openers Computer-controlled embroidery machines Scanners Packaging equipment and
TYPICAL APPLICATIONS Medical equipment - pumps, blowers and electric scooters and wheelchairs Automatic door and window openers Computer-controlled embroidery machines Scanners Packaging equipment and
Driving Characteristics of Cylindrical Linear Synchronous Motor. Motor. 1. Introduction. 2. Configuration of Cylindrical Linear Synchronous 1 / 5
 1 / 5 SANYO DENKI TECHNICAL REPORT No.8 November-1999 General Theses Driving Characteristics of Cylindrical Linear Synchronous Motor Kazuhiro Makiuchi Satoshi Sugita Kenichi Fujisawa Yoshitomo Murayama
1 / 5 SANYO DENKI TECHNICAL REPORT No.8 November-1999 General Theses Driving Characteristics of Cylindrical Linear Synchronous Motor Kazuhiro Makiuchi Satoshi Sugita Kenichi Fujisawa Yoshitomo Murayama
INDUCTANCE FM CHAPTER 6
 CHAPTER 6 INDUCTANCE INTRODUCTION The study of inductance is a very challenging but rewarding segment of electricity. It is challenging because at first it seems that new concepts are being introduced.
CHAPTER 6 INDUCTANCE INTRODUCTION The study of inductance is a very challenging but rewarding segment of electricity. It is challenging because at first it seems that new concepts are being introduced.
ELECTRIC MACHINES EUROLAB 0.3 kw
 index SINGLE-PHASE MOTORS SPLIT-PHASE MOTOR DL 30130 CAPACITOR MOTOR DL 30140 UNIVERSAL MOTOR DL 30150 REPULSION MOTOR DL 30170 THREE PHASE ASYNCHRONOUS MOTORS SQUIRREL CAGE THREE PHASE ASYNCHRONOUS MOTOR
index SINGLE-PHASE MOTORS SPLIT-PHASE MOTOR DL 30130 CAPACITOR MOTOR DL 30140 UNIVERSAL MOTOR DL 30150 REPULSION MOTOR DL 30170 THREE PHASE ASYNCHRONOUS MOTORS SQUIRREL CAGE THREE PHASE ASYNCHRONOUS MOTOR
LINEAR MOTORS. Technology of linear motors
 LINEAR MOTORS Since linear motors do not have any gear unit it is more simple converting motion in electrical drives. Combined with magnet floating technology an absolutely contact-less and so a wear resistant
LINEAR MOTORS Since linear motors do not have any gear unit it is more simple converting motion in electrical drives. Combined with magnet floating technology an absolutely contact-less and so a wear resistant
Chapter 4 DC Machines
 Principles of Electric Machines and Power Electronics Chapter 4 DC Machines Third Edition P. C. Sen Chapter 4 DC machine Electric machine Type: rotating machine Applications: generator (electric source)
Principles of Electric Machines and Power Electronics Chapter 4 DC Machines Third Edition P. C. Sen Chapter 4 DC machine Electric machine Type: rotating machine Applications: generator (electric source)
Physics12 Unit 8/9 Electromagnetism
 Name: Physics12 Unit 8/9 Electromagnetism 1. An electron, travelling with a constant velocity, enters a region of uniform magnetic field. Which of the following is not a possible pathway? 2. A bar magnet
Name: Physics12 Unit 8/9 Electromagnetism 1. An electron, travelling with a constant velocity, enters a region of uniform magnetic field. Which of the following is not a possible pathway? 2. A bar magnet
Courtesy of CMA/Flodyne/Hydradyne Motion Control Hydraulic Pneumatic Electrical Mechanical (800)
") P01 LinMot P is a family of linear direct drives for highly dynamic motions. The motor is made up of just two parts: the slider and the stator. The two parts are not connected by brushes or cables. The
P01 LinMot P is a family of linear direct drives for highly dynamic motions. The motor is made up of just two parts: the slider and the stator. The two parts are not connected by brushes or cables. The
3. What are the sensors used in engine management system? (N/D 2011) Airflow sensor Ford-type MAP sensors Hall effect and AC excited sensors
 Airflow sensor Ford-type MAP sensors Hall effect and AC excited sensors") (Other possible questions) 1. List out the drawbacks of traditional design approach. (N/D 2012) The drawbacks of traditional design approach are: Less flexible Less accurate More complicate mechanism in
(Other possible questions) 1. List out the drawbacks of traditional design approach. (N/D 2012) The drawbacks of traditional design approach are: Less flexible Less accurate More complicate mechanism in
Fundamental Training. Flow Con t
 Fundamental Training Flow Con t 1 Contents Topics: Slide No: Velocity flow meters 3-11 Mass flow meters 12-17 Displacement meters 18 Exercise 19-20 2 Velocity Meter Magnetic Flowmeter Faraday s Law of
Fundamental Training Flow Con t 1 Contents Topics: Slide No: Velocity flow meters 3-11 Mass flow meters 12-17 Displacement meters 18 Exercise 19-20 2 Velocity Meter Magnetic Flowmeter Faraday s Law of
Actuators & Mechanisms
 Course Code: MDP 454, Course Name:, Second Semester 2014 Actuators & Mechanisms Lectures Joints (Fasteners, Connectors) Power/Energy Conversion (Electrical Motors) Transmission Support (Bearings) Power/Energy
Course Code: MDP 454, Course Name:, Second Semester 2014 Actuators & Mechanisms Lectures Joints (Fasteners, Connectors) Power/Energy Conversion (Electrical Motors) Transmission Support (Bearings) Power/Energy