Practical Challenges to Deploying Highly Automated Vehicles
|
|
|
- Adele Newton
- 5 years ago
- Views:
Transcription
1 Practical Challenges to Deploying Highly Automated Vehicles Steven E. Shladover, Sc.D. California PATH Program (Retired) Institute of Transportation Studies University of California, Berkeley 6 th NYC Symposium on Connected and Automated Vehicles October 23,
2 Outline Historical overview Road vehicle automation terminology Importance of connectivity for automation Perception technology challenges Safety assurance challenges Market introduction and growth how slow? 2

3 General Motors 1939 Futurama 3

4 GM Firebird II Publicity Video 4

5 GM Technology in

6 General Motors 1964 Futurama II 6

7 Robert Fenton s OSU Research 7

8 PATH s 1997 Automated Highway System Platoon Demo 8
9 Outline Historical overview Road vehicle automation terminology Importance of connectivity for automation Perception technology challenges Safety assurance challenges Market introduction and growth how slow? 9
10 Terminology Inhibiting Understanding Common misleading, vague to wrong terms: driverless but generally they re not! self-driving robotic autonomous 4 common usages, but different in meaning (and 3 are wrong!) Defining aspects of a driving automation system: Roles of driver and the system Degree of connectedness and cooperation Operational design domain 10
11 11
12 Operational Design Domain (ODD) The specific conditions under which a given driving automation system is designed to function, including: Roadway type Traffic conditions and speed range Geographic location (geofenced boundaries) Weather and lighting conditions Availability of necessary supporting infrastructure features Condition of pavement markings and signage (and potentially more ) Will be different for every system 12
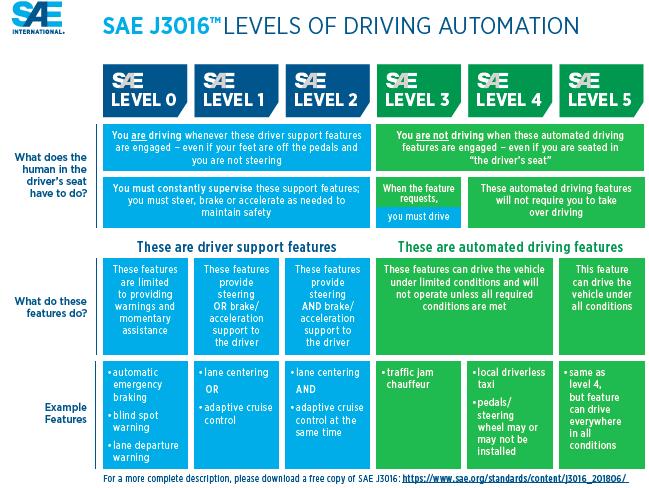
13 Example Systems at Each Automation Level (based on SAE J Level Example Systems Driver Roles 1 Adaptive Cruise Control OR Lane Centering 2 Adaptive Cruise Control AND Lane Centering Highway driving assistance systems (Mercedes, Tesla, Infiniti, Volvo ) Parking with external supervision Must drive other function and monitor driving environment Must monitor driving environment (system nags driver to try to ensure it) 3 Freeway traffic jam chauffeur May read a book, text, or web surf, but be prepared to intervene when needed 4 Highway driving pilot Closed campus driverless shuttle Driverless valet parking in garage 5 Ubiquitous automated taxi Ubiquitous car-share repositioning May sleep, and system can revert to minimal risk condition if needed Can operate anywhere with no drivers needed 13
14 Outline Historical overview Road vehicle automation terminology Importance of connectivity for automation Perception technology challenges Safety assurance challenges Market introduction and growth how slow? 14
15 Cooperation Augments Sensing Autonomous vehicles can t communicate Automation without connectivity will be bad for traffic flow, efficiency and probably safety But Cooperative vehicles can talk and listen as well as seeing (using 5.9 GHz DSRC) Communicate vehicle performance and condition directly rather than sensing indirectly Faster, richer and more accurate information Longer range, beyond sensor line of sight Cooperative decision making for system benefits Enables closer separations between vehicles Expands performance envelope safety, capacity, efficiency and ride quality 15
16 Traffic Simulations to Estimate Impacts of Connected Automated Vehicles (CAV) High-fidelity representations of human driver car following and lane changing Calibrate human driver model to traffic data from a real freeway corridor Model ACC and CACC car following based on full-scale vehicle experimental data Model traffic management strategies for taking advantage of CAV capabilities Analyze simulated vehicle speed profiles to estimate energy consumption Results for Level 1 automation are relevant for higher levels of automation 16
17 AACC Car-Following Model Predictions Compared to Calibration Test Results Speeds (Test above, model below) Accelerations (Test above, model below) Note string instability (amplification of disturbance) without connectivity/cooperation Ref. Milanes and Shladover, Transportation Research Part C, Vol. 48, 2014) 17
 Note stable response with cooperation Ref. Milanes and Shladover, Transportation Research Part C, Vol.")
18 CACC Car-Following Model Predictions Compared to Calibration Test Results Speeds (Test above, model below) Accelerations (Test above, model below) Note stable response with cooperation Ref. Milanes and Shladover, Transportation Research Part C, Vol. 48, 2014) 18

19 CACC Throughput with Varying On-Ramp Volumes Ramp traffic entering in veh/hr Mainline input traffic volume is at pipeline capacity for that market penetration Downstream throughput reduces as on-ramp traffic increases 19
20 AACC Throughput with Varying On-Ramp Volumes Traffic flow instability with AACC (lacking V2V communication capability) 20


21 Animations Comparing Manual and CACC Driving at a Merge Junction for the Same Traffic Volume All Manual 100% CACC Mainline input: 7500 veh/hr On-ramp input: 900 veh/hr 21





22 Fuel Consumption Rate Patterns at Merge Junction All Manual All CACC on-ramp: 1200 veh/h All AACC All CACC on-ramp: 600 veh/h 22

 20% CACC 40% CACC 60% CACC 80% CACC 100%")
23 Effects of CACC Market Penetration on SR-99 Freeway Corridor Traffic Traffic speeds from 4 am to 12 noon at current traffic volume All manual (today) 20% CACC 40% CACC 60% CACC 80% CACC 100% CACC 23
24 Outline Historical overview Road vehicle automation terminology Importance of connectivity for automation Perception technology challenges Safety assurance challenges Market introduction and growth how slow? 24
25 Environment Perception (Sensing) Challenges for Highly Automated Driving Recognizing all relevant objects within vehicle path Predicting future motions of mobile objects (vehicles, pedestrians, bicyclists, animals ) Must at least match perception capabilities of experienced human drivers under all environmental conditions within ODD No single silver bullet sensor; will need to fuse: Radar AND Lidar AND High-precision digital mapping/localization AND Video imaging AND Wireless communication 25
26 Safety Functionality Trade-offs False positive vs. false negative hazard detection Safety requires virtually zero false negatives (always detect real hazards) Limit speed to improve sensor discrimination capability When in doubt, stop Functionality requires very low false positives Avoid spurious emergency braking Maintain high enough speed to provide useful transportation service 26





27 Simplifying the Environment for Level 4 Automation via Cooperative Infrastructure 27
28 Outline Historical overview Road vehicle automation terminology Importance of connectivity for automation Perception technology challenges Safety assurance challenges Market introduction and growth how slow? 28
29 The Safety Baseline Challenge Current U.S. traffic safety sets a very high bar: 3.4 M vehicle hours between fatal crashes (390 years of non-stop 24/7 driving) 61,400 vehicle hours between injury crashes (7 years of non-stop 24/7 driving) This will improve with growing use of collision warning and avoidance systems How does that compare with your laptop, tablet or smart phone? How much testing do you have to do to show that an automated system is equally safe? RAND study multiple factors longer 29
30 Evidence from Recent AV Testing California DMV testing rules require annual reports on safety-related disengagements Waymo (ex-google) well ahead of the others: But their reports are based on reconstructions of disengagement cases in simulations (critical event if it had continued after disengagement) Estimated ~5600 miles between critical events based on 2017 data (9% improvement over 2016) Human drivers in U.S. traffic safety statistics: ~ 2 million miles per injury crash (maybe ~ 300,000 miles for any kind of crash) 100 million miles per fatal crash 30
31 How to certify safe enough? What combinations of input conditions to assess? What combination of closed track testing, public road testing, and simulation? How much of each is needed? How to validate simulations? What time and cost? Aerospace experience shows software V&V representing 50% of new aircraft development cost (for much simpler software, with continuous expert oversight) 31
32 Needed Breakthroughs Software safety design, verification and validation methods to overcome limitations of: Formal methods Brute-force testing Non-deterministic learning systems Robust threat assessment sensing and signal processing to reach zero false negatives and nearzero false positives Robust control system fault detection, identification and accommodation, within 0.1 s response Ethical decision making for robotics Cyber-security protection 32
33 Much Harder than Commercial Aircraft Autopilot Automation Measure of Difficulty Orders of Magnitude Factor Number of targets each vehicle needs to track (~10) 1 Number of vehicles the region needs to monitor (~10 6 ) 4 Accuracy of range measurements needed to each target (~10 cm) Accuracy of speed difference measurements needed to each target (~1 m/s) Time available to respond to an emergency while cruising (~0.1 s) Acceptable cost to equip each vehicle (~$3000) 3 Annual production volume of automation systems (~10 6 ) - 4 Sum total of orders of magnitude
34 Outline Historical overview Road vehicle automation terminology Importance of connectivity for automation Perception technology challenges Safety assurance challenges Market introduction and growth how slow? 34
35 Making automated driving as safe as humans is like climbing Mt. Everest Automated Driving System Climbing Mt. Everest My system handles 90% of the scenarios it will encounter on the road My system handles 99% of the scenarios it will encounter on the road My system handles 99.9% of the scenarios it will encounter on the road My system handles 99.99% of the scenarios it will encounter on the road I flew from San Francisco to New Delhi, covering 90% of the distance to Everest I flew from New Delhi to Katmandu, so I m 99% of the way to Everest I flew to the airport closest to Everest Base Camp I hiked up to Everest Base Camp And now comes the really hard work! My system handles % of the scenarios it will encounter, so it s comparable to an average skilled driver I made it to the summit of Mt. Everest 35
36 Personal Estimates of Market Introductions ** based on technological feasibility ** Everywhere General urban streets, some cities Closed campus or pedestrian zone Limited-access highway Fully Segregated Guideway Color Key: Level 1 (ACC) Level 2 (ACC+ LKA) Level 3 Conditional Automation Level 4 High Automation Now ~2020s ~2025s ~2030s ~~2075 Level 5 Full Automation 36
37 Fastest changes in automotive market: Regulatory mandate forcing them Source: Gargett, Cregan and Cosgrove, Australian Transport Research Forum % 6 years (22 years) 37
38 Historical Market Growth Curves for Popular Automotive Features (35 years) Percentages of NEW vehicles sold each year in U.S. 38
39 Regulations Impeding Progress? California has strictest regulations on AV testing in the U.S., but we have (as of 9/18): 56 companies with testing licenses for 520 test vehicles and 1845 test drivers Regulations need to balance protecting the public from unsafe, immature systems with encouraging safe innovations. When AV developers can convincingly prove safety of their systems, regulators will eagerly approve them because of public demand But proving safety is really hard! 39
40 A Nationwide Automation Revolution? Highly improbable because: Automation systems must be designed to serve requirements of specific ODDs, but many different ODDs must be served before all transportation needs can be met Inertia limits rate of change in vehicle market and roadway infrastructure (large sunk capital) Can t extrapolate from young urban professional trends to suburban, exurban and rural actions Cars are more than a means of transportation Social factors are likely to constrain growth in ride sharing 40
41 Widespread loss of driving jobs? Highly improbable because: Automation will only be capable of taking over driving within narrowly constrained ODDs for the foreseeable future Professional drivers have responsibilities beyond the dynamic driving task (serving passenger needs, providing security, loading and unloading vehicles, ) There is a severe shortage of professional drivers, especially for long-haul trucking 41
42 The end of car ownership because of automation? Highly improbable because: Personal cars provide more than transportation, especially outside urban cores: Status and self-image Mobile storage locker for personal needs and for purchases on shopping trips Privacy/isolation from outside world stresses Control of one s own space. Self-sufficiency for essential mobility can be an important aspect of personal dignity Personal vehicles are essential business tools for salespeople, construction and maintenance tradespeople, farmers, etc. 42
43 Shared automated vehicles taking over the transportation system? Highly improbable because: People want to have their own vehicles and privacy Automation will only be capable of serving limited ODD applications for the foreseeable future Sharing needs trip density to be economically viable People are likely to be reluctant to share a small automated vehicle with a few total strangers: Personal security concerns in the absence of an authority figure (the driver) Personal preferences (hygiene, music choices, ) Privacy of personal communications Likely a specialized urban niche Lyft appears to understand this 43
44 How to Reconcile This With the Optimism You See in the Media? Public is eager to gain the benefits of automation Media are eager to satisfy public hunger, and science fiction is sexier than science fact Industry is in fear of missing out (FOMO) on the next big thing Each company seeks image of technology leader, so they exaggerate their claims Journalists lack technical insight to ask the right probing questions Companies are manipulating media reports CEO and marketing claims don t match the reality of what the engineers are actually developing 44
45 How to maximize progress now? Focus on implementing systems that are technically feasible now to enhance performance and gain public confidence: Level 1, 2 driving automation DSRC communications (V2V, I2V) Develop more highly automated systems within well-constrained ODDs to ensure safety, then gradually relax ODD constraints as technology advances Work toward the fundamental breakthroughs needed for high automation under general (relatively unconstrained) conditions 45
Practical Challenges to Deploying Highly Automated Vehicles
 Practical Challenges to Deploying Highly Automated Vehicles Steven E. Shladover, Sc.D. California PATH Program (Retired) Institute of Transportation Studies University of California, Berkeley Drive Sweden
Practical Challenges to Deploying Highly Automated Vehicles Steven E. Shladover, Sc.D. California PATH Program (Retired) Institute of Transportation Studies University of California, Berkeley Drive Sweden
Road Vehicle Automation: Distinguishing Reality from Hype
 Road Vehicle Automation: Distinguishing Reality from Hype Steven E. Shladover, Sc.D. California PATH Program University of California, Berkeley March 20, 2014 1 Outline Historical development of automation
Road Vehicle Automation: Distinguishing Reality from Hype Steven E. Shladover, Sc.D. California PATH Program University of California, Berkeley March 20, 2014 1 Outline Historical development of automation
Support Material Agenda Item No. 3
 Support Material Agenda Item No. 3 Board of Directors Workshop October 19, 2017, 12:30 PM Location Lake Arrowhead Resort and Spa 27984 Highway 189, 1 st Floor, Arrowhead Ballroom Lake Arrowhead, CA Agenda
Support Material Agenda Item No. 3 Board of Directors Workshop October 19, 2017, 12:30 PM Location Lake Arrowhead Resort and Spa 27984 Highway 189, 1 st Floor, Arrowhead Ballroom Lake Arrowhead, CA Agenda
Road Vehicle Automation Categories and their Opportunities and Challenges
 Road Vehicle Automation Categories and their Opportunities and Challenges Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California, Berkeley ARRB,
Road Vehicle Automation Categories and their Opportunities and Challenges Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California, Berkeley ARRB,
Future Prospects for Connected Automated Vehicle Systems
 Future Prospects for Connected Automated Vehicle Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California, Berkeley June 2016 1 Outline Historical
Future Prospects for Connected Automated Vehicle Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California, Berkeley June 2016 1 Outline Historical
Near-Term Automation Issues: Use Cases and Standards Needs
 Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Road Vehicle Automation: History, Opportunities and Challenges
 Road Vehicle Automation: History, Opportunities and Challenges Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California, Berkeley September 2017 1
Road Vehicle Automation: History, Opportunities and Challenges Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California, Berkeley September 2017 1
Road Vehicle Automation History, Opportunities and Challenges
 Road Vehicle Automation History, Opportunities and Challenges Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California, Berkeley Transport Futures:
Road Vehicle Automation History, Opportunities and Challenges Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California, Berkeley Transport Futures:
Development of California Regulations for Testing and Operation of Automated Driving Systems
 Development of California Regulations for Testing and Operation of Automated Driving Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California,
Development of California Regulations for Testing and Operation of Automated Driving Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California,
Autonomous Automated and Connected Vehicles
 Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Research Challenges for Automated Vehicles
 Research Challenges for Automated Vehicles Steven E. Shladover, Sc.D. University of California, Berkeley October 10, 2005 1 Overview Reasons for automating vehicles How automation can improve efficiency
Research Challenges for Automated Vehicles Steven E. Shladover, Sc.D. University of California, Berkeley October 10, 2005 1 Overview Reasons for automating vehicles How automation can improve efficiency
PERSPECTIVES ON HOW CV AV TECHNOLOGIES AND THE MUTCD
 PERSPECTIVES ON HOW CV AV TECHNOLOGIES AND THE MUTCD US DOT Eric Ferron, FHWA MUTCD Team State DOT Peter Kozinski, Colorado DOT Research Steve Shladover, Berkley OEM Ed Bradley, Toyota Technology Tammy
PERSPECTIVES ON HOW CV AV TECHNOLOGIES AND THE MUTCD US DOT Eric Ferron, FHWA MUTCD Team State DOT Peter Kozinski, Colorado DOT Research Steve Shladover, Berkley OEM Ed Bradley, Toyota Technology Tammy
Intelligent Vehicle Systems
 Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Automated Vehicles: Terminology and Taxonomy
 Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
Robots on Our Roads: The Coming Revolution in Mobility. Ohio Planning Conference July 27, 2016 Richard Bishop
 Robots on Our Roads: The Coming Revolution in Mobility Ohio Planning Conference July 27, 2016 Richard Bishop Myths! The roads need to be changed to make automated driving possible. WRONG! All vehicles
Robots on Our Roads: The Coming Revolution in Mobility Ohio Planning Conference July 27, 2016 Richard Bishop Myths! The roads need to be changed to make automated driving possible. WRONG! All vehicles
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future.
 Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future. Eugene A. Petersen Tire Program Manager-CR For over
Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future. Eugene A. Petersen Tire Program Manager-CR For over
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE. CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development
 AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
AUTONOMOUS VEHICLES: PAST, PRESENT, FUTURE CEM U. SARAYDAR Director, Electrical and Controls Systems Research Lab GM Global Research & Development GENERAL MOTORS FUTURAMA 1939 Highways & Horizons showed
Driving simulation and Scenario Factory for Automated Vehicle validation
 Driving simulation and Scenario Factory for Automated Vehicle validation Pr. Andras Kemeny Scientific Director, A. V. Simulation Expert Leader, Renault INDEX 1. Introduction of autonomous driving 2. Validation
Driving simulation and Scenario Factory for Automated Vehicle validation Pr. Andras Kemeny Scientific Director, A. V. Simulation Expert Leader, Renault INDEX 1. Introduction of autonomous driving 2. Validation
Safety Considerations of Autonomous Vehicles. Darren Divall Head of International Road Safety TRL
 Safety Considerations of Autonomous Vehicles Darren Divall Head of International Road Safety TRL TRL History Autonomous Vehicles TRL Self-driving car, 1960s Testing partial automation, TRL, 2000s Testing
Safety Considerations of Autonomous Vehicles Darren Divall Head of International Road Safety TRL TRL History Autonomous Vehicles TRL Self-driving car, 1960s Testing partial automation, TRL, 2000s Testing
The connected vehicle is the better vehicle!
 AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
Convergence: Connected and Automated Mobility
 Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
Autonomous Vehicles: Status, Trends and the Large Impact on Commuting
 Autonomous Vehicles: Status, Trends and the Large Impact on Commuting Barrie Kirk, P.Eng. Executive Director, Canadian Automated Vehicles Centre of Excellence Presentation to ACT Canada October 26, 2016
Autonomous Vehicles: Status, Trends and the Large Impact on Commuting Barrie Kirk, P.Eng. Executive Director, Canadian Automated Vehicles Centre of Excellence Presentation to ACT Canada October 26, 2016
Disruptive Technology and Mobility Change
 Disruptive Technology and Mobility Change What it Might Mean for Urban Transportation Ed Regan Senior Vice President June 1, 2018 Presented at Transport Chicago Ed Regan, SVP, CDM Smith 43-year veteran
Disruptive Technology and Mobility Change What it Might Mean for Urban Transportation Ed Regan Senior Vice President June 1, 2018 Presented at Transport Chicago Ed Regan, SVP, CDM Smith 43-year veteran
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF
 AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
AUTONOMOUS VEHICLES & HD MAP CREATION TEACHING A MACHINE HOW TO DRIVE ITSELF CHRIS THIBODEAU SENIOR VICE PRESIDENT AUTONOMOUS DRIVING Ushr Company History Industry leading & 1 st HD map of N.A. Highways
Model Legislation for Autonomous Vehicles (2018)
") Model Legislation for Autonomous Vehicles (2018) What is the Self-Driving Coalition for Safer Streets? The Self-Driving Coalition for Safer Streets was formed by Ford, Lyft, Volvo Cars, Uber, and Waymo
Model Legislation for Autonomous Vehicles (2018) What is the Self-Driving Coalition for Safer Streets? The Self-Driving Coalition for Safer Streets was formed by Ford, Lyft, Volvo Cars, Uber, and Waymo
State of the art in autonomous driving. German Aerospace Center DLR Institute of transportation systems
 DLR.de Chart 1 State of the art in autonomous driving German Aerospace Center DLR Institute of transportation systems Smart Cities Symposium Prague 2017 Dr.-Ing. Reza Dariani DLR.de Chart 2 DLR at a glance
DLR.de Chart 1 State of the art in autonomous driving German Aerospace Center DLR Institute of transportation systems Smart Cities Symposium Prague 2017 Dr.-Ing. Reza Dariani DLR.de Chart 2 DLR at a glance
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help?
 Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
WHITE PAPER Autonomous Driving A Bird s Eye View
 WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
Leveraging AI for Self-Driving Cars at GM. Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel
 Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems
 Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems Podcar City 7 Symposium Emerging Transportation Technologies R&D George Mason University, October
Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems Podcar City 7 Symposium Emerging Transportation Technologies R&D George Mason University, October
EPSRC-JLR Workshop 9th December 2014 TOWARDS AUTONOMY SMART AND CONNECTED CONTROL
 EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
Traffic Operations with Connected and Automated Vehicles
 Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Test & Validation Challenges Facing ADAS and CAV
 Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Advanced Vehicle Control System Development Div.
 Autonomous Driving Technologies for Advanced Driver Assist System Toyota Motor Corporation Advanced Vehicle Control System Development Div. Hiroyuki KANEMITSU Contents 1. Definition of automated driving.
Autonomous Driving Technologies for Advanced Driver Assist System Toyota Motor Corporation Advanced Vehicle Control System Development Div. Hiroyuki KANEMITSU Contents 1. Definition of automated driving.
Ensuring the safety of automated vehicles
 Ensuring the safety of automated vehicles Alan Stevens Workshop on Verification and Validation for Autonomous Road Vehicles 4 Nov 2016 1 Agenda / Table of contents 1 2 3 Planning trials and safety Estimating
Ensuring the safety of automated vehicles Alan Stevens Workshop on Verification and Validation for Autonomous Road Vehicles 4 Nov 2016 1 Agenda / Table of contents 1 2 3 Planning trials and safety Estimating
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
DOE s Focus on Energy Efficient Mobility Systems
 DOE s Focus on Energy Efficient Mobility Systems Mark Smith Vehicle Technologies Office NASEO Smart Mobility Webinar October 30, 2017 MOBILITY IS FOUNDATIONAL TO OUR WAY OF LIFE 2 CONVERGING TRENDS ARE
DOE s Focus on Energy Efficient Mobility Systems Mark Smith Vehicle Technologies Office NASEO Smart Mobility Webinar October 30, 2017 MOBILITY IS FOUNDATIONAL TO OUR WAY OF LIFE 2 CONVERGING TRENDS ARE
Autonomous Vehicles in California. Brian G. Soublet Deputy Director Chief Counsel California Department of Motor Vehicles
 Autonomous Vehicles in California Brian G. Soublet Deputy Director Chief Counsel California Department of Motor Vehicles 1 The Vision of the Future Advertisement from 1957 Independent Electric Light and
Autonomous Vehicles in California Brian G. Soublet Deputy Director Chief Counsel California Department of Motor Vehicles 1 The Vision of the Future Advertisement from 1957 Independent Electric Light and
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Planning for Autonomous Vehicles
 Photo courtesy Waymo, a self-driving technology company at Alphabet Inc. Downloaded 10/16/2017 Planning for Autonomous Vehicles Transportation Policy Committee November 15, 2017 2017, All Rights Reserved.
Photo courtesy Waymo, a self-driving technology company at Alphabet Inc. Downloaded 10/16/2017 Planning for Autonomous Vehicles Transportation Policy Committee November 15, 2017 2017, All Rights Reserved.
Efficiency Matters for Mobility. Presented at A3PS ECO MOBILITY 2018 Vienna, Austria November 12 th and 13 th, 2018
 Efficiency Matters for Mobility High-Performance, Ann M. Schlenker Agent-Based Director, Simulation Center for of Transportation Travelers Research and Transportation Argonne National Laboratory Systems
Efficiency Matters for Mobility High-Performance, Ann M. Schlenker Agent-Based Director, Simulation Center for of Transportation Travelers Research and Transportation Argonne National Laboratory Systems
APCO International. Emerging Technology Forum
 APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
AdaptIVe: Automated driving applications and technologies for intelligent vehicles
 Jens Langenberg Aachen 06 October 2015 AdaptIVe: Automated driving applications and technologies for intelligent vehicles Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration: 42
Jens Langenberg Aachen 06 October 2015 AdaptIVe: Automated driving applications and technologies for intelligent vehicles Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration: 42
University of Michigan s Work Toward Autonomous Cars
 University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
Development of California Regulations for the Testing and Operation of Automated Vehicles on Public Roads
 Development of California Regulations for the Testing and Operation of Automated Vehicles on Public Roads Steven E. Shladover, Sc.D. Christopher Nowakowski Roberto Horowitz, Ph.D. Ching-Yao Chan, Ph.D.
Development of California Regulations for the Testing and Operation of Automated Vehicles on Public Roads Steven E. Shladover, Sc.D. Christopher Nowakowski Roberto Horowitz, Ph.D. Ching-Yao Chan, Ph.D.
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System
 System") Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Functional Safety Analysis of Automated Vehicle Lane Centering Control Systems. Volpe The National Transportation Systems Center
 Functional Safety Analysis of Automated Vehicle Lane Centering Control Systems John Brewer and Wassim Najm Volpe National Transportation Systems Center July 22, 2015 Volpe The National Transportation Systems
Functional Safety Analysis of Automated Vehicle Lane Centering Control Systems John Brewer and Wassim Najm Volpe National Transportation Systems Center July 22, 2015 Volpe The National Transportation Systems
PSA Peugeot Citroën Driving Automation and Connectivity
 PSA Peugeot Citroën Driving Automation and Connectivity June 2015 Automation Driver Levels of Automated Driving Driver continuously performs the longitudinal and lateral dynamic driving task Driver continuously
PSA Peugeot Citroën Driving Automation and Connectivity June 2015 Automation Driver Levels of Automated Driving Driver continuously performs the longitudinal and lateral dynamic driving task Driver continuously
Role of Connected and Autonomous Vehicles
 Role of Connected and Autonomous Vehicles Transport for Smart Cities in Canada 2016 and Beyond By Ekke Kok, M.Eng., P.Eng. Manager of Transportation Data City of Calgary Autonomous Vehicles 03/05/2016
Role of Connected and Autonomous Vehicles Transport for Smart Cities in Canada 2016 and Beyond By Ekke Kok, M.Eng., P.Eng. Manager of Transportation Data City of Calgary Autonomous Vehicles 03/05/2016
REAL AND VIRTUAL PROVING OF AUTOMATED DRIVING IN BERLIN'S MIXED TRAFFIC. Dr. Ilja Radusch,
 REAL AND VIRTUAL PROVING OF AUTOMATED DRIVING IN BERLIN'S MIXED TRAFFIC Dr. Ilja Radusch, ilja.radusch@fokus.fraunhofer.de 10.05.2017 WHO AM I? Director Smart Mobility at Fraunhofer Fraunhofer is Europe
REAL AND VIRTUAL PROVING OF AUTOMATED DRIVING IN BERLIN'S MIXED TRAFFIC Dr. Ilja Radusch, ilja.radusch@fokus.fraunhofer.de 10.05.2017 WHO AM I? Director Smart Mobility at Fraunhofer Fraunhofer is Europe
Fleet Penetration of Automated Vehicles: A Microsimulation Analysis
 Fleet Penetration of Automated Vehicles: A Microsimulation Analysis Corresponding Author: Elliot Huang, P.E. Co-Authors: David Stanek, P.E. Allen Wang 2017 ITE Western District Annual Meeting San Diego,
Fleet Penetration of Automated Vehicles: A Microsimulation Analysis Corresponding Author: Elliot Huang, P.E. Co-Authors: David Stanek, P.E. Allen Wang 2017 ITE Western District Annual Meeting San Diego,
Application of Autonomous Driving Technology to Transit
 Application of Autonomous Driving Technology to Transit 2013 ITS New Jersey Annual Conference MetLife Stadium December 16, 2013 Jerome M. Lutin, Ph.D., P.E. Senior Director, Statewide & Regional Planning
Application of Autonomous Driving Technology to Transit 2013 ITS New Jersey Annual Conference MetLife Stadium December 16, 2013 Jerome M. Lutin, Ph.D., P.E. Senior Director, Statewide & Regional Planning
Economic and Social Council
 United Nations Economic and Social Council ECE/TRANS/WP.29/2017/145 Distr.: General 11 October 2017 English only Economic Commission for Europe Inland Transport Committee World Forum for Harmonization
United Nations Economic and Social Council ECE/TRANS/WP.29/2017/145 Distr.: General 11 October 2017 English only Economic Commission for Europe Inland Transport Committee World Forum for Harmonization
NHTSA Update: Connected Vehicles V2V Communications for Safety
 NHTSA Update: Connected Vehicles V2V Communications for Safety Alrik L. Svenson Transportation Research Board Meeting Washington, D.C. January 12, 2015 This is US Government work and may be copied without
NHTSA Update: Connected Vehicles V2V Communications for Safety Alrik L. Svenson Transportation Research Board Meeting Washington, D.C. January 12, 2015 This is US Government work and may be copied without
AUTONOMOUS VEHICLES AND THE TRUCKING INDUSTRY
 AUTONOMOUS VEHICLES AND THE TRUCKING INDUSTRY Presentation for the Maine State Agencies Working Group on Connected and Autonomous Vehicles August 14, 2017 Brian Parke bparke@mmta.com Tim Doyle timd@mmta.com
AUTONOMOUS VEHICLES AND THE TRUCKING INDUSTRY Presentation for the Maine State Agencies Working Group on Connected and Autonomous Vehicles August 14, 2017 Brian Parke bparke@mmta.com Tim Doyle timd@mmta.com
Automated driving in urban environments: technical challenges, open problems and barriers. Fawzi Nashashibi
 Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
The Way Forward for Self Driving Cars
 The Way Forward for Self Driving Cars A General Perspective Quite possibly, the first wide reaching and profound integration of personal robots in society. -Lex Fridman, MIT How would you imagine a future
The Way Forward for Self Driving Cars A General Perspective Quite possibly, the first wide reaching and profound integration of personal robots in society. -Lex Fridman, MIT How would you imagine a future
Connected Vehicle and Autonomous Vehicle (CV/AV) Mobility and Technology
 Mobility and Technology") Connected Vehicle and Autonomous Vehicle (CV/AV) Mobility and Technology Randy Iwasaki Executive Director Contra Costa Transportation Authority May13, 2016 WHO WE ARE The Contra Costa Transportation Authority
Connected Vehicle and Autonomous Vehicle (CV/AV) Mobility and Technology Randy Iwasaki Executive Director Contra Costa Transportation Authority May13, 2016 WHO WE ARE The Contra Costa Transportation Authority
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications
 Systems: Architectures, Controls, and Applications") A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
G4 Apps. Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013
 Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
Dr. Mohamed Abdel-Aty, P.E. Connected-Autonomous Vehicles (CAV): Background and Opportunities. Trustee Chair
: Background and Opportunities. Trustee Chair") Connected-Autonomous Vehicles (CAV): Background and Opportunities Dr. Mohamed Abdel-Aty, P.E. Trustee Chair Pegasus Professor Chair, Dept. of Civil, Environmental & Construction Engineering University
Connected-Autonomous Vehicles (CAV): Background and Opportunities Dr. Mohamed Abdel-Aty, P.E. Trustee Chair Pegasus Professor Chair, Dept. of Civil, Environmental & Construction Engineering University
Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations
: Challenges and Opportunities for Traffic Operations") NTUA Seminar Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations Toronto, 1959 Los Angeles, 2009 Alexander Skabardonis NTUA 1977, University of California, Berkeley
NTUA Seminar Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations Toronto, 1959 Los Angeles, 2009 Alexander Skabardonis NTUA 1977, University of California, Berkeley
Planning for AUTONOMOUS VEHICLES. Presentation on the planning implications of self-driving vehicles. by Ryan Snyder Transportation Planning Expert
 Planning for AUTONOMOUS VEHICLES Presentation on the planning implications of self-driving vehicles. by Ryan Snyder Transportation Planning Expert LEVELS OF AV TECHNOLOGY LEVEL 1 LEVEL 4 function-specific
Planning for AUTONOMOUS VEHICLES Presentation on the planning implications of self-driving vehicles. by Ryan Snyder Transportation Planning Expert LEVELS OF AV TECHNOLOGY LEVEL 1 LEVEL 4 function-specific
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY
 ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
Truck CACC Fuel Economy Testing: Initial Test Track Results
 Truck CACC Fuel Economy Testing: Initial Test Track Results X. Y. Lu California PATH Program, U. C. Berkeley Barry Pekilis, ecotechnology for Vehicles, Transport Canada TRB Vehicle-Highway Automation Committee
Truck CACC Fuel Economy Testing: Initial Test Track Results X. Y. Lu California PATH Program, U. C. Berkeley Barry Pekilis, ecotechnology for Vehicles, Transport Canada TRB Vehicle-Highway Automation Committee
On the role of AI in autonomous driving: prospects and challenges
 On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
On the role of AI in autonomous driving: prospects and challenges April 20, 2018 PhD Outreach Scientist 1.3 million deaths annually Road injury is among the major causes of death 90% of accidents are caused
Safety for Self-driving Cars
 Tech.AD. 5-6 March, 2018 Berlin Safety for Self-driving Safety for Cars Self-driving Cars -Challenges and Some Solutions -Challenges and Some Solutions Author: Håkan Sivencrona, PhD Functional Jonas Nilsson,
Tech.AD. 5-6 March, 2018 Berlin Safety for Self-driving Safety for Cars Self-driving Cars -Challenges and Some Solutions -Challenges and Some Solutions Author: Håkan Sivencrona, PhD Functional Jonas Nilsson,
Automation is in the Eye of the Beholder: How it Might be Viewed by the Traffic Engineer
 Automation is in the Eye of the Beholder: How it Might be Viewed by the Traffic Engineer ITE and ITSA Luncheon, Oakland, March 20, 2014 Jim Misener, jmisener@gmail.com 415.335.9252 Agenda Connected Vehicles
Automation is in the Eye of the Beholder: How it Might be Viewed by the Traffic Engineer ITE and ITSA Luncheon, Oakland, March 20, 2014 Jim Misener, jmisener@gmail.com 415.335.9252 Agenda Connected Vehicles
Citi's 2016 Car of the Future Symposium
 Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
A Communication-centric Look at Automated Driving
 A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
Aria Etemad Volkswagen Group Research. Key Results. Aachen 28 June 2017
 Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
Written Testimony of Josh Fisher Manager, State Government Affairs, Association of Global Automakers, before the Ohio House Transportation and Public
 Written Testimony of Josh Fisher Manager, State Government Affairs, Association of Global Automakers, before the Ohio House Transportation and Public Safety Committee October 4, 2017 Testimony Chairman
Written Testimony of Josh Fisher Manager, State Government Affairs, Association of Global Automakers, before the Ohio House Transportation and Public Safety Committee October 4, 2017 Testimony Chairman
AND CHANGES IN URBAN MOBILITY PATTERNS
 TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
MAKING CARS SMARTER ODOT Planning Conference Transporting Technology Connected & Autonomous Vehicles
 MAKING CARS SMARTER 2016 ODOT Planning Conference Transporting Technology Connected & Autonomous Vehicles WHY VEHICLE AUTOMATION? 35,200 motor vehicle deaths in 2015 Safety Aging Society Energy/ Congestion
MAKING CARS SMARTER 2016 ODOT Planning Conference Transporting Technology Connected & Autonomous Vehicles WHY VEHICLE AUTOMATION? 35,200 motor vehicle deaths in 2015 Safety Aging Society Energy/ Congestion
Bernard C. Soriano, Ph.D. Deputy Director California Department of Motor Vehicles
 Bernard C. Soriano, Ph.D. Deputy Director California Department of Motor Vehicles Where It All Began Senate Bill 1298 (2012 Legislative Session) California Vehicle Code sec. 38750 DMV to develop regulations
Bernard C. Soriano, Ph.D. Deputy Director California Department of Motor Vehicles Where It All Began Senate Bill 1298 (2012 Legislative Session) California Vehicle Code sec. 38750 DMV to develop regulations
Challenges To The Future of Mobility
 Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) Challenges To The Future of Mobility Jeff Klei, President North America, Continental
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) Challenges To The Future of Mobility Jeff Klei, President North America, Continental
Activity-Travel Behavior Impacts of Driverless Cars
 January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
Self-Driving Cars: The Next Revolution. Los Angeles Auto Show. November 28, Gary Silberg National Automotive Sector Leader KPMG LLP
 Self-Driving Cars: The Next Revolution Los Angeles Auto Show November 28, 2012 Gary Silberg National Automotive Sector Leader KPMG LLP 0 Our point of view 1 Our point of view: Self-Driving cars may be
Self-Driving Cars: The Next Revolution Los Angeles Auto Show November 28, 2012 Gary Silberg National Automotive Sector Leader KPMG LLP 0 Our point of view 1 Our point of view: Self-Driving cars may be
THE FUTURE OF AUTONOMOUS CARS
 Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
TOWARDS ACCIDENT FREE DRIVING
 ETSI SUMMIT: 5G FROM MYTH TO REALITY TOWARDS ACCIDENT FREE DRIVING Niels Peter Skov Andersen, General Manager Car 2 Car Communication Consortium All rights reserved How do we stop the cars colliding First
ETSI SUMMIT: 5G FROM MYTH TO REALITY TOWARDS ACCIDENT FREE DRIVING Niels Peter Skov Andersen, General Manager Car 2 Car Communication Consortium All rights reserved How do we stop the cars colliding First
Smart Control for Electric/Autonomous Vehicles
 Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Formal Methods will not Prevent Self-Driving Cars from Having Accidents
 Formal Methods will not Prevent Self-Driving Cars from Having Accidents Thierry Fraichard INRIA, LIG-CNRS and Grenoble University Forum Méthodes Formelles Mardi 10 octobre 2017 From Mobile Robots to Self-Driving
Formal Methods will not Prevent Self-Driving Cars from Having Accidents Thierry Fraichard INRIA, LIG-CNRS and Grenoble University Forum Méthodes Formelles Mardi 10 octobre 2017 From Mobile Robots to Self-Driving
The IAM in Pre-Selection of global automotive trends impacting the independent multi-brand aftermarket
 The IAM in 2030 Pre-Selection of global automotive trends impacting the independent multi-brand aftermarket 10th of June 2016 The automotive aftermarket is based on a highly complex value chain with a
The IAM in 2030 Pre-Selection of global automotive trends impacting the independent multi-brand aftermarket 10th of June 2016 The automotive aftermarket is based on a highly complex value chain with a
Software Driving License
 What if technology takes over all driving tasks? Software Driving License Gerben Feddes RDW & Jorrit Kuipers robottuner Intertraffic 2018 22-03-2017 Amsterdam Agenda 1. Software Driving License 2. ISO
What if technology takes over all driving tasks? Software Driving License Gerben Feddes RDW & Jorrit Kuipers robottuner Intertraffic 2018 22-03-2017 Amsterdam Agenda 1. Software Driving License 2. ISO
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm)
") Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) ADAS and Automated Driving Functionality Blessing and Curse Alfred Eckert, Head
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) ADAS and Automated Driving Functionality Blessing and Curse Alfred Eckert, Head
Autonomous Vehicles Meet Human Drivers: Traffic Safety Issues for States
 Autonomous Vehicles Meet Human Drivers: Traffic Safety Issues for States Jim Hedlund Highway Safety North Lifesavers March 27, 2017 Report released Feb. 2, 2017 2 Today Background What s an autonomous
Autonomous Vehicles Meet Human Drivers: Traffic Safety Issues for States Jim Hedlund Highway Safety North Lifesavers March 27, 2017 Report released Feb. 2, 2017 2 Today Background What s an autonomous
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE. Alex Haag Munich,
 REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
REGULATORY APPROVAL OF AN AI-BASED AUTONOMOUS VEHICLE Alex Haag Munich, 10.10.2017 10/9/17 Regulatory Approval of an AI-based Autonomous Vehicle 2 1 INTRO Autonomous Intelligent Driving, GmbH Launched
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts
 Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
Driver Assistance & Autonomous Driving
 Driver Assistance & Autonomous Driving Challenges and Opportunities Presented by Marc Seguer ADAS, Chasis Development SEAT, S.A. 30/03/2016 1 Driver Assistance & Autonomous Driving / Prepared by Marc Seguer
Driver Assistance & Autonomous Driving Challenges and Opportunities Presented by Marc Seguer ADAS, Chasis Development SEAT, S.A. 30/03/2016 1 Driver Assistance & Autonomous Driving / Prepared by Marc Seguer
Connected Automated Trucking: Latest Developments and Outlook
 Connected Automated Trucking: Latest Developments and Outlook 2017 Florida Automated Vehicles Summit November 14-15, 2017 Day Two General Session Richard Bishop 1 AUTOMATED DRIVING DOMAINS 2 Passenger
Connected Automated Trucking: Latest Developments and Outlook 2017 Florida Automated Vehicles Summit November 14-15, 2017 Day Two General Session Richard Bishop 1 AUTOMATED DRIVING DOMAINS 2 Passenger
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS
 ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS Bill Visnic Editorial Director, Mobility Media 2017 FAV Summit ACES Policies and Standards Breakout Session Wednesday,
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS Bill Visnic Editorial Director, Mobility Media 2017 FAV Summit ACES Policies and Standards Breakout Session Wednesday,
AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS. Innovation Bazaar, Vehicle ICT Arena ver 2. RISE Viktoria Kent Eric Lång
 AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS Innovation Bazaar, Vehicle ICT Arena 2018-02-08 ver 2 Research Institutes of Sweden RISE Viktoria Kent Eric Lång 2 AUTONOMOUS DRIVING AND
AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS Innovation Bazaar, Vehicle ICT Arena 2018-02-08 ver 2 Research Institutes of Sweden RISE Viktoria Kent Eric Lång 2 AUTONOMOUS DRIVING AND
AI challenges for Automated & Connected Vehicles
 AI challenges for Automated & Connected Vehicles Pr. Fabien MOUTARDE Center for Robotics MINES ParisTech PSL Université Fabien.Moutarde@mines-paristech.fr http://people.mines-paristech.fr/fabien.moutarde
AI challenges for Automated & Connected Vehicles Pr. Fabien MOUTARDE Center for Robotics MINES ParisTech PSL Université Fabien.Moutarde@mines-paristech.fr http://people.mines-paristech.fr/fabien.moutarde
Autonomous Vehicles: A look into the past - a look into the future
 Autonomous Vehicles: A look into the past - a look into the future Chester Wilmot, LTRC/LSU Presentation to the New Orleans Regional Planning Commission Freight Round Table 10/25/2017 THE PAST 1939 World
Autonomous Vehicles: A look into the past - a look into the future Chester Wilmot, LTRC/LSU Presentation to the New Orleans Regional Planning Commission Freight Round Table 10/25/2017 THE PAST 1939 World
Autonomous Vehicles in California. Brian G. Soublet Deputy Director Chief Counsel California Department of Motor Vehicles
 Autonomous Vehicles in California Brian G. Soublet Deputy Director Chief Counsel California Department of Motor Vehicles 1 California Vehicle Code Section 38570 As soon as practicable, but no later than
Autonomous Vehicles in California Brian G. Soublet Deputy Director Chief Counsel California Department of Motor Vehicles 1 California Vehicle Code Section 38570 As soon as practicable, but no later than
Pedalling into a driverless world: opportunities and threats
 John Parkin Professor of Transport Engineering John.parkin@uwe.ac.uk Pedalling into a driverless world: opportunities and threats International Cycling Conference, Mannheim 19 th to 21 st September 2017
John Parkin Professor of Transport Engineering John.parkin@uwe.ac.uk Pedalling into a driverless world: opportunities and threats International Cycling Conference, Mannheim 19 th to 21 st September 2017
C A. Right on track to enhanced driving safety. CAPS - Combined Active & Passive Safety. Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle
 Right on track to enhanced driving safety C A SP Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle 1 Outline CAPS motivation & content of activity Accident analysis & development methodology Market, drivers,
Right on track to enhanced driving safety C A SP Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle 1 Outline CAPS motivation & content of activity Accident analysis & development methodology Market, drivers,