Functional Safety Analysis of Automated Vehicle Lane Centering Control Systems. Volpe The National Transportation Systems Center
|
|
|
- Harold Cunningham
- 5 years ago
- Views:
Transcription


1 Functional Safety Analysis of Automated Vehicle Lane Centering Control Systems John Brewer and Wassim Najm Volpe National Transportation Systems Center July 22, 2015 Volpe The National Transportation Systems Center 2015 Automated Vehicles Symposium Volpe The National Transportation Systems Center Advancing transportation innovation for the public good U.S. Department of Transportation John A. Volpe National Transportation Systems Center
2 Project Purpose Goal Ensure the safe operation and functional safety of reliable automated lane centering control systems at all NHTSA automation levels Objectives 1. Conduct comprehensive hazard analysis 2. Provide research findings supportive of functional safety concepts o o o o and requirements, including diagnostic needs identify performance parameters functional safety test scenarios driver-vehicle interface requirements 3. Provide research findings supportive of improving driver awareness and training Focus Light vehicles Steering and/or braking lateral controls Shared lateral and longitudinal control systems





3 Research Approach and Tasks System Description and Understanding Hazard Analysis Diagnostic and Prognostic Needs Functional Safety Requirements Performance Parameters Driver-Vehicle Interface Needs Driver Awareness and Training Needs Functional Safety Test Scenarios Operator Awareness, Response & Training Vehicle Health Management Response Mechanisms

4 TRW Automotive Depiction of Lateral Assist Technologies (used with permission)
5 Terminology and Nomenclature Lateral Control ( Lane Centering ) An essential function of vehicle automation when integrated with longitudinal vehicle control systems such as adaptive cruise control Largely implemented through shared braking and/or steering control services with longitudinal control systems Automated Lane Centering vs. Automated Lane Keeping ALC provides continuous control across the lane width ALK provides control inputs only near lane boundaries Industry often refers to these features as assist e.g., Lane Keep Assist or Lane Center Assist Emphasizes that current implementations are convenience features rather than safety systems
6 Subject Matter Expert Interviews The SMEs included representatives from: The University of Minnesota The University of California, Berkeley ESG Automotive (ESG) The U.S. Army Tank Automotive Research, Development and Engineering Center (TARDEC) Ford Motor Company (Ford) TRW Automotive (TRW) Google, Inc.
7 Subject Matter Expert Insights Lateral control is more commonly implemented through steering rather than torque vectoring and brake vectoring. Current ALK/ALC Limitations: Vehicle (roadway illumination, quality of sensor data, etc.) Performance envelope (vehicle speed, curvature, etc.) Infrastructure (road markings, etc.) Environment (weather, lighting, etc.) Other (roadway hazards, traffic diverted away from lanes, etc.) OEMs classify current lateral assist technologies as Level 1 or 2 Driver notification and monitoring driver engagement are significant challenges for Level 3 Driver-Vehicle Interface (DVI)/Human-Machine Interface (HMI) approaches have not been standardized. Industry considers overall automated system safety in addition to functional safety
8 Analytical Process Item Definition: System Scope and Definition System Block Diagram Vehicle Level Hazard Analysis HAZOP* STPA Step 1* Vehicle Level Hazards Risk Assessment ASIL Vehicle Level Safety Goals with ASIL Safety Analysis FMEA* STPA Step 2 * Functional safety concept: 1. Fault detection & failure mitigation 2. Safe states 3. Driver warning & degradation strategy 4. Allocation to system elements Functional Safety Requirements *ISO does not require specific methods for hazard and safety analyses. Other comparable hazard and safety analysis methods may be used. Existing industry practice in meeting the functional safety requirements (based on public information)
9 Hazard Analysis and Risk Assessment Identify potential vehicle-level hazards and causal factors associated with the failure of lane centering technologies and component braking services 1. Query crash data, recalls, and owners complaints 2. Conduct comprehensive hazard analysis to identify hazards, unsafe control actions, and causal factors o o System Theoretic Process Analysis (STPA) HazOp plus Safety Analysis (e.g., FMEA) 3. Perform risk assessment to classify hazards according to severity, exposure, and controllability o Consider exposure and vehicle use cases in various driving scenarios (i.e., normal-driving, driving-conflict, and crash-imminent situations) and environmental conditions.


10 Hazard Analysis with STPA Method System Description System-Level Losses Hazards Unsafe Control Actions Causal Factors

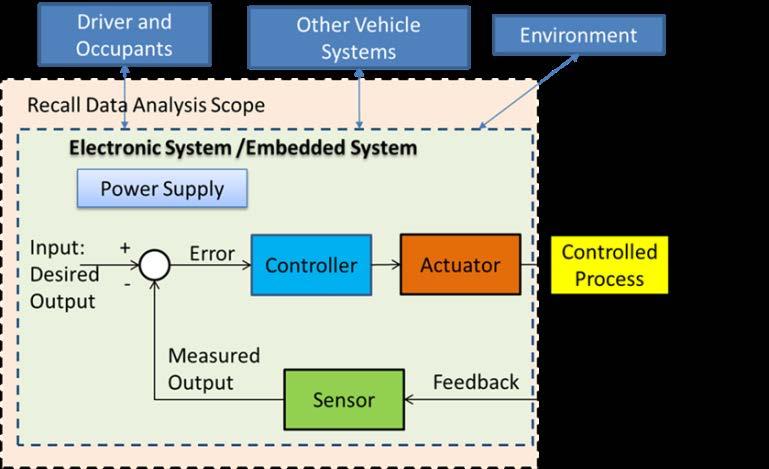
11 Analytical Scope of Automated Lane Centering/Automated Lane Keeping Systems
12 Foundational Analysis Across NHTSA Automation Levels Foundational System Level 1 Level 2 Level 3 Level 4 Steering (Electric Power Steering [EPS], Steer-by- Wire [SbW]) Braking (ESC, ABS) Acceleration Control (ICE, EV, HEV) ALC/ALK ACC Vehicle Dynamics Integrated Module [VDIM]
13 Proposed Hazard Analyses One analysis of ALK/ALC system with steering and braking as black boxes Will not consider specifics of sensors. Will focus on the critical sensor information for the ALK/ALC control module. Steering Two steering system analyses (Electric Power Steering, Steer-by- Wire). ALK/ALC interface is via steering requests from Other Vehicle Systems Braking One braking system analysis (Conventional braking with ESC/ABS). ALK/ALC interface is via braking requests from Other Vehicle Systems.
14 Relationship Between Lateral Control and NHTSA Automation Levels* At Level 1, ALK/ALC is a stand-alone feature At Level 2, ALK/ALC may be combined with another feature (e.g., Adaptive Cruise Control [ACC]) to provide some automation At Level 3 or 4, both lateral and longitudinal control need to be integrated into path planning and hazard recognition/avoidance Complete Level 3 / 4 functionality is out of scope for this project Analyses of foundational systems are still relevant for Levels 3 and 4. *For this poster, Level refers to NHTSA Automation Level rather than the SAE definition

15 Control Structure Diagram for a Lane Keep Assist/Lane Centering Assist System

16 Control Structure Diagram for a Conventional Hydraulic Brake System with Electronic Stability Control

17 Control Structure Diagram for an Electric Power Steering System

18 Control Structure Diagram for a Steer-by-Wire System
Compatibility of STPA with GM System Safety Engineering Process. Padma Sundaram Dave Hartfelder
 Compatibility of STPA with GM System Safety Engineering Process Padma Sundaram Dave Hartfelder Table of Contents Introduction GM System Safety Engineering Process Overview Experience with STPA Evaluation
Compatibility of STPA with GM System Safety Engineering Process Padma Sundaram Dave Hartfelder Table of Contents Introduction GM System Safety Engineering Process Overview Experience with STPA Evaluation
WHITE PAPER Autonomous Driving A Bird s Eye View
 WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
STPA in Automotive Domain Advanced Tutorial
 www.uni-stuttgart.de The Second European STAMP Workshop 2014 STPA in Automotive Domain Advanced Tutorial Asim Abdulkhaleq, Ph.D Student Institute of Software Technology University of Stuttgart, Germany
www.uni-stuttgart.de The Second European STAMP Workshop 2014 STPA in Automotive Domain Advanced Tutorial Asim Abdulkhaleq, Ph.D Student Institute of Software Technology University of Stuttgart, Germany
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
Aria Etemad Volkswagen Group Research. Key Results. Aachen 28 June 2017
 Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
GM Presentation for Introducing
 GM Presentation for Introducing STPA STAMP/STPA Integration Tools into into GM Standards Safety Process SAE STPA Recommended Practice Task Force Mark A. Vernacchia, PE GM Technical Fellow Principal System
GM Presentation for Introducing STPA STAMP/STPA Integration Tools into into GM Standards Safety Process SAE STPA Recommended Practice Task Force Mark A. Vernacchia, PE GM Technical Fellow Principal System
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts
 Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
Can STPA contribute to identify hazards of different natures and improve safety of automated vehicles?
 Can STPA contribute to identify hazards of different natures and improve safety of automated vehicles? Stephanie Alvarez, Franck Guarnieri & Yves Page (MINES ParisTech, PSL Research University and RENAULT
Can STPA contribute to identify hazards of different natures and improve safety of automated vehicles? Stephanie Alvarez, Franck Guarnieri & Yves Page (MINES ParisTech, PSL Research University and RENAULT
State-of-the-Art and Future Trends in Testing of Active Safety Systems
 State-of-the-Art and Future Trends in Testing of Active Safety Systems Empirical Study Results with the Swedish Alessia Knauss (Chalmers), Christian Berger (GU), and Henrik Eriksson (SP) A-TEAM project
State-of-the-Art and Future Trends in Testing of Active Safety Systems Empirical Study Results with the Swedish Alessia Knauss (Chalmers), Christian Berger (GU), and Henrik Eriksson (SP) A-TEAM project
Enhancing Safety Through Automation
 Enhancing Safety Through Automation TRB Automated Vehicle Workshop, July 25, 2012 Tim Johnson Director, Office of Crash Avoidance and Electronic Controls Research National Highway Traffic Safety Administration
Enhancing Safety Through Automation TRB Automated Vehicle Workshop, July 25, 2012 Tim Johnson Director, Office of Crash Avoidance and Electronic Controls Research National Highway Traffic Safety Administration
Automated Driving. Definition for Levels of Automation OICA,
 Informal document No. WP.29-162-20 162 th WP.29 session, 11-14 March 2014 agenda item 20. Automated Driving Definition for Levels of Automation OICA, 2014-03-14 Motivation New automated driving and parking
Informal document No. WP.29-162-20 162 th WP.29 session, 11-14 March 2014 agenda item 20. Automated Driving Definition for Levels of Automation OICA, 2014-03-14 Motivation New automated driving and parking
Technology for Transportation s Future
 Technology for Transportation s Future Shelley Row Director, ITS Joint Program Office Research and Innovative Technology Administration U.S. Department of Transportation National Conference of State Legislatures
Technology for Transportation s Future Shelley Row Director, ITS Joint Program Office Research and Innovative Technology Administration U.S. Department of Transportation National Conference of State Legislatures
Outline of Definition of Automated Driving Technology
 Submitted by Japan Document No. ITS/AD-05-04 (5th ITS/AD, 24 June 2015, agenda item 3-2) Outline of Definition of Driving Technology Background and Purpose Background Many of the existing definitions of
Submitted by Japan Document No. ITS/AD-05-04 (5th ITS/AD, 24 June 2015, agenda item 3-2) Outline of Definition of Driving Technology Background and Purpose Background Many of the existing definitions of
EPSRC-JLR Workshop 9th December 2014 TOWARDS AUTONOMY SMART AND CONNECTED CONTROL
 EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
Analyzing Feature Interactions in Automobiles. John Thomas, Ph.D. Seth Placke
 Analyzing Feature Interactions in Automobiles John Thomas, Ph.D. Seth Placke 3.25.14 Outline Project Introduction & Background STPA Case Study New Strategy for Analyzing Interactions Contributions Project
Analyzing Feature Interactions in Automobiles John Thomas, Ph.D. Seth Placke 3.25.14 Outline Project Introduction & Background STPA Case Study New Strategy for Analyzing Interactions Contributions Project
Application of STPA to a Shift by Wire System (GM-MIT Research Project)
") Application of STPA to a Shift by Wire System (GM-MIT Research Project) GM Team Joe D Ambrosio Rami Debouk Dave Hartfelder Padma Sundaram Mark Vernacchia Sigrid Wagner MIT Team John Thomas Seth Placke
Application of STPA to a Shift by Wire System (GM-MIT Research Project) GM Team Joe D Ambrosio Rami Debouk Dave Hartfelder Padma Sundaram Mark Vernacchia Sigrid Wagner MIT Team John Thomas Seth Placke
Model Legislation for Autonomous Vehicles (2018)
") Model Legislation for Autonomous Vehicles (2018) What is the Self-Driving Coalition for Safer Streets? The Self-Driving Coalition for Safer Streets was formed by Ford, Lyft, Volvo Cars, Uber, and Waymo
Model Legislation for Autonomous Vehicles (2018) What is the Self-Driving Coalition for Safer Streets? The Self-Driving Coalition for Safer Streets was formed by Ford, Lyft, Volvo Cars, Uber, and Waymo
APCO International. Emerging Technology Forum
 APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
Applying STPA to Automo0ve Adap0ve Cruise Control System. Dr. Qi Van Eikema Hommes April 18, 2012
 Applying STPA to Automo0ve Adap0ve Cruise Control System Dr. Qi Van Eikema Hommes qhommes@mit.edu April 18, 2012 Enhancing Automotive System Safety Roadway and driver (1889 1960s) Better roads, speed limit
Applying STPA to Automo0ve Adap0ve Cruise Control System Dr. Qi Van Eikema Hommes qhommes@mit.edu April 18, 2012 Enhancing Automotive System Safety Roadway and driver (1889 1960s) Better roads, speed limit
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm)
") Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) ADAS and Automated Driving Functionality Blessing and Curse Alfred Eckert, Head
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) ADAS and Automated Driving Functionality Blessing and Curse Alfred Eckert, Head
State of the art in autonomous driving. German Aerospace Center DLR Institute of transportation systems
 DLR.de Chart 1 State of the art in autonomous driving German Aerospace Center DLR Institute of transportation systems Smart Cities Symposium Prague 2017 Dr.-Ing. Reza Dariani DLR.de Chart 2 DLR at a glance
DLR.de Chart 1 State of the art in autonomous driving German Aerospace Center DLR Institute of transportation systems Smart Cities Symposium Prague 2017 Dr.-Ing. Reza Dariani DLR.de Chart 2 DLR at a glance
Autonomous Automated and Connected Vehicles
 Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Automated Vehicles: Terminology and Taxonomy
 Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Development of California Regulations for Testing and Operation of Automated Driving Systems
 Development of California Regulations for Testing and Operation of Automated Driving Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California,
Development of California Regulations for Testing and Operation of Automated Driving Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California,
Special GRRF Session on
 Informal document No. GRRF-S08-09 Special GRRF brainstorming session 9 December 2008 Agenda item 4(c) Special GRRF Session on Automatic Emergency Braking and Lane Departure Warning Systems Brainstorming
Informal document No. GRRF-S08-09 Special GRRF brainstorming session 9 December 2008 Agenda item 4(c) Special GRRF Session on Automatic Emergency Braking and Lane Departure Warning Systems Brainstorming
Highly Automated Driving: Fiction or Future?
 The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
The future of driving. Final Event Highly Automated Driving: Fiction or Future? Prof. Dr. Jürgen Leohold Volkswagen Group Research Motivation The driver as the unpredictable factor: Human error is the
18th ICTCT Workshop, Helsinki, October Technical feasibility of safety related driving assistance systems
 18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
NHTSA Update: Connected Vehicles V2V Communications for Safety
 NHTSA Update: Connected Vehicles V2V Communications for Safety Alrik L. Svenson Transportation Research Board Meeting Washington, D.C. January 12, 2015 This is US Government work and may be copied without
NHTSA Update: Connected Vehicles V2V Communications for Safety Alrik L. Svenson Transportation Research Board Meeting Washington, D.C. January 12, 2015 This is US Government work and may be copied without
The Future of Vehicle Safety
 The Future of Vehicle Safety Presented at the University of Minnesota CTS Winter Luncheon 2008 Ron Medford Senior Associate Administrator, Vehicle Safety 1 Top 10 Leading Causes of Death in U.S. 2002 data,
The Future of Vehicle Safety Presented at the University of Minnesota CTS Winter Luncheon 2008 Ron Medford Senior Associate Administrator, Vehicle Safety 1 Top 10 Leading Causes of Death in U.S. 2002 data,
STPA based Method to Identify and Control Software Feature Interactions. John Thomas Dajiang Suo
 STPA based Method to Identify and Control Software Feature Interactions John Thomas Dajiang Suo Quote The hardest single part of building a software system is deciding precisely what to build. -- Fred
STPA based Method to Identify and Control Software Feature Interactions John Thomas Dajiang Suo Quote The hardest single part of building a software system is deciding precisely what to build. -- Fred
A Presentation on. Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing
 in autonomous vehicles for alerting driver during overtaking and lane changing") A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
A Presentation on Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing Presented By: Abhishek Shriram Umachigi Department of Electrical Engineering
Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future.
 Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future. Eugene A. Petersen Tire Program Manager-CR For over
Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future. Eugene A. Petersen Tire Program Manager-CR For over
2015 STPA Conference. A s t u d y o n t h e f u s i o n o f S T P A a n d N i s s a n ' s S y s t e m s E n g i n e e r i n g
 2015 STPA Conference A s t u d y o n t h e f u s i o n o f S T P A a n d N i s s a n ' s S y s t e m s E n g i n e e r i n g Nissan Motor Co., Ltd Tetsunobu Morita, Takashi Nakazawa Masaaki Uchida Massachusetts
2015 STPA Conference A s t u d y o n t h e f u s i o n o f S T P A a n d N i s s a n ' s S y s t e m s E n g i n e e r i n g Nissan Motor Co., Ltd Tetsunobu Morita, Takashi Nakazawa Masaaki Uchida Massachusetts
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY
 ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
Women In Transportation Seminar The Future of Transportation How Do We Get There. US Department of Transportation NHTSA Julie J Kang
 Women In Transportation Seminar The Future of Transportation How Do We Get There US Department of Transportation NHTSA Julie J Kang NHTSA s Mission and Strategy NHTSA is an organization under the U.S.
Women In Transportation Seminar The Future of Transportation How Do We Get There US Department of Transportation NHTSA Julie J Kang NHTSA s Mission and Strategy NHTSA is an organization under the U.S.
OPTIMORE - Optimised Modular Range Extender for every day customer usage AVL SCHRICK project summary
 AVL SCHRICK project summary GA05 / final meeting 18./19. September 2014 Gothenburg, Sweden AVL SCHRICK work packages and deliverables overview Work Package 5 Functional Safety (WP lead) D 5.1 - Item Definition
AVL SCHRICK project summary GA05 / final meeting 18./19. September 2014 Gothenburg, Sweden AVL SCHRICK work packages and deliverables overview Work Package 5 Functional Safety (WP lead) D 5.1 - Item Definition
Adaptive Cruise Control System Overview
 5th Meeting of the U.S. Software System Safety Working Group April 12th-14th 2005 @ Anaheim, California USA 1 Introduction Adaptive Cruise System Overview Adaptive Cruise () is an automotive feature that
5th Meeting of the U.S. Software System Safety Working Group April 12th-14th 2005 @ Anaheim, California USA 1 Introduction Adaptive Cruise System Overview Adaptive Cruise () is an automotive feature that
The Fourth Phase of Advanced Safety Vehicle Project - technologies for collision avoidance -
 The Fourth Phase of Advanced Safety Vehicle Project - technologies for collision avoidance - October 2006 ITS World Congress London Kenji Wani Road Transport Bureau MLIT Japan History of ASV Phase 3:2001-2005
The Fourth Phase of Advanced Safety Vehicle Project - technologies for collision avoidance - October 2006 ITS World Congress London Kenji Wani Road Transport Bureau MLIT Japan History of ASV Phase 3:2001-2005
Traffic Management through C-ITS and Automation: a perspective from the U.S.
 Traffic Management through C-ITS and Automation: a perspective from the U.S. Matthew Barth University of California-Riverside Yeager Families Professor Director, Center for Environmental Research and Technology
Traffic Management through C-ITS and Automation: a perspective from the U.S. Matthew Barth University of California-Riverside Yeager Families Professor Director, Center for Environmental Research and Technology
ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM
 ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM Massachusetts Institute of Technology John Thomas Megan France General Motors Charles A. Green Mark A. Vernacchia Padma Sundaram Joseph
ENGINEERING FOR HUMANS STPA ANALYSIS OF AN AUTOMATED PARKING SYSTEM Massachusetts Institute of Technology John Thomas Megan France General Motors Charles A. Green Mark A. Vernacchia Padma Sundaram Joseph
Injuries from Motor Vehicle Crashes 48,000 46,000
 Trillion Vehicle- Miles Traveled Annual fatalities from MVC Fatalities/ 100 million miles 8/5/2013 New Vehicle Safety Technologies Kathleen D. Klinich Injuries from Motor Vehicle Crashes 48,000 46,000
Trillion Vehicle- Miles Traveled Annual fatalities from MVC Fatalities/ 100 million miles 8/5/2013 New Vehicle Safety Technologies Kathleen D. Klinich Injuries from Motor Vehicle Crashes 48,000 46,000
THE FUTURE OF SAFETY IS HERE
 THE FUTURE OF SAFETY IS HERE TOYOTA S ADVANCED ACTIVE SAFETY PACKAGES: TSS-C AND TSS-P Crash protection starts with crash prevention. Collisions that result in injury may be caused by the delay in a driver
THE FUTURE OF SAFETY IS HERE TOYOTA S ADVANCED ACTIVE SAFETY PACKAGES: TSS-C AND TSS-P Crash protection starts with crash prevention. Collisions that result in injury may be caused by the delay in a driver
V2V Advancements in the last 12 months. CAMP and related activities
 V2V Advancements in the last 12 months CAMP and related activities Mike Shulman, Ford April 22, 2014 Connected Transportation Environment: Future Vision Mobility Safety Environment Global Gridlock 2 US:
V2V Advancements in the last 12 months CAMP and related activities Mike Shulman, Ford April 22, 2014 Connected Transportation Environment: Future Vision Mobility Safety Environment Global Gridlock 2 US:
Citi's 2016 Car of the Future Symposium
 Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
An Overview of Automotive EMC Standards & Emerging Requirements
 An Overview of Automotive EMC Standards & Emerging Requirements 2015. 5. 29 Korea Automobile Testing & Research Institute (KATRI) TOPICs 1. Automotive Electronics of the Future 2. Automotive EMC Standards
An Overview of Automotive EMC Standards & Emerging Requirements 2015. 5. 29 Korea Automobile Testing & Research Institute (KATRI) TOPICs 1. Automotive Electronics of the Future 2. Automotive EMC Standards
Dr. Mohamed Abdel-Aty, P.E. Connected-Autonomous Vehicles (CAV): Background and Opportunities. Trustee Chair
: Background and Opportunities. Trustee Chair") Connected-Autonomous Vehicles (CAV): Background and Opportunities Dr. Mohamed Abdel-Aty, P.E. Trustee Chair Pegasus Professor Chair, Dept. of Civil, Environmental & Construction Engineering University
Connected-Autonomous Vehicles (CAV): Background and Opportunities Dr. Mohamed Abdel-Aty, P.E. Trustee Chair Pegasus Professor Chair, Dept. of Civil, Environmental & Construction Engineering University
The way forward: The future of electric vehicles
 The way forward: The future of electric vehicles Peter Kasten Workshop: Post-2020 CO 2 emission targets for new cars and vans: the right level of ambition? European Parliament, Brussels, 27 March 2018
The way forward: The future of electric vehicles Peter Kasten Workshop: Post-2020 CO 2 emission targets for new cars and vans: the right level of ambition? European Parliament, Brussels, 27 March 2018
Euro NCAP Safety Assist
 1 SA -1 Content Euro NCAP Safety Assist Road Map 2020 2 SA -2 1 Content Euro NCAP Safety Assist 3 SA -3 Overall Rating 2015 4 SA -4 2 Safety Assist - Overview 2016+ 0 Points 2016+ 3 Points 5 SA -5 SBR
1 SA -1 Content Euro NCAP Safety Assist Road Map 2020 2 SA -2 1 Content Euro NCAP Safety Assist 3 SA -3 Overall Rating 2015 4 SA -4 2 Safety Assist - Overview 2016+ 0 Points 2016+ 3 Points 5 SA -5 SBR
H2020 (ART ) CARTRE SCOUT
 CARTRE SCOUT") H2020 (ART-06-2016) CARTRE SCOUT Objective Advance deployment of connected and automated driving across Europe October 2016 September 2018 Coordination & Support Action 2 EU-funded Projects 36 consortium
H2020 (ART-06-2016) CARTRE SCOUT Objective Advance deployment of connected and automated driving across Europe October 2016 September 2018 Coordination & Support Action 2 EU-funded Projects 36 consortium
Optimizing Battery Accuracy for EVs and HEVs
 Optimizing Battery Accuracy for EVs and HEVs Introduction Automotive battery management system (BMS) technology has advanced considerably over the last decade. Today, several multi-cell balancing (MCB)
Optimizing Battery Accuracy for EVs and HEVs Introduction Automotive battery management system (BMS) technology has advanced considerably over the last decade. Today, several multi-cell balancing (MCB)
The Vehicle s Digitalization: Continental s digital journey Ralf Lenninger Continental Automotive GmbH
 Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 13,2 cm) The Vehicle s Digitalization: Continental s digital journey Ralf Lenninger Continental
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 13,2 cm) The Vehicle s Digitalization: Continental s digital journey Ralf Lenninger Continental
Automobile Body, Chassis, Occupant and Pedestrian Safety, and Structures Track
 Automobile Body, Chassis, Occupant and Pedestrian Safety, and Structures Track These sessions are related to Body Engineering, Fire Safety, Human Factors, Noise and Vibration, Occupant Protection, Steering
Automobile Body, Chassis, Occupant and Pedestrian Safety, and Structures Track These sessions are related to Body Engineering, Fire Safety, Human Factors, Noise and Vibration, Occupant Protection, Steering
Driver Assistance & Autonomous Driving
 Driver Assistance & Autonomous Driving Challenges and Opportunities Presented by Marc Seguer ADAS, Chasis Development SEAT, S.A. 30/03/2016 1 Driver Assistance & Autonomous Driving / Prepared by Marc Seguer
Driver Assistance & Autonomous Driving Challenges and Opportunities Presented by Marc Seguer ADAS, Chasis Development SEAT, S.A. 30/03/2016 1 Driver Assistance & Autonomous Driving / Prepared by Marc Seguer
Audi piloted driving. Audi piloted driving. Daniel Lipinski, Electronic Research Lab, Volkswagen Group of America
 1 Daniel Lipinski, Electronic Research Lab, Volkswagen Group of America Audi goals for piloted driving The potential for driver assistance and integral safety functions lies with driver support other Technical
1 Daniel Lipinski, Electronic Research Lab, Volkswagen Group of America Audi goals for piloted driving The potential for driver assistance and integral safety functions lies with driver support other Technical
SHC Swedish Centre of Excellence for Electromobility
 SHC Swedish Centre of Excellence for Electromobility Cost effective electric machine requirements for HEV and EV Anders Grauers Associate Professor in Hybrid and Electric Vehicle Systems SHC SHC is a national
SHC Swedish Centre of Excellence for Electromobility Cost effective electric machine requirements for HEV and EV Anders Grauers Associate Professor in Hybrid and Electric Vehicle Systems SHC SHC is a national
CHALLENGES AHEAD KEEPING PACE WITH RAPID ADVANCES IN COLLISION REPAIR BY JASON BARTANEN
 FEATURE CHALLENGES AHEAD KEEPING PACE WITH RAPID ADVANCES IN COLLISION REPAIR BY JASON BARTANEN As the automotive industry moves deeper into the mobility arena, it also enters a more challenging realm
FEATURE CHALLENGES AHEAD KEEPING PACE WITH RAPID ADVANCES IN COLLISION REPAIR BY JASON BARTANEN As the automotive industry moves deeper into the mobility arena, it also enters a more challenging realm
INFRASTRUCTURE SYSTEMS FOR INTERSECTION COLLISION AVOIDANCE
 INFRASTRUCTURE SYSTEMS FOR INTERSECTION COLLISION AVOIDANCE Robert A. Ferlis Office of Operations Research and Development Federal Highway Administration McLean, Virginia USA E-mail: robert.ferlis@fhwa.dot.gov
INFRASTRUCTURE SYSTEMS FOR INTERSECTION COLLISION AVOIDANCE Robert A. Ferlis Office of Operations Research and Development Federal Highway Administration McLean, Virginia USA E-mail: robert.ferlis@fhwa.dot.gov
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS
 ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS Bill Visnic Editorial Director, Mobility Media 2017 FAV Summit ACES Policies and Standards Breakout Session Wednesday,
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS Bill Visnic Editorial Director, Mobility Media 2017 FAV Summit ACES Policies and Standards Breakout Session Wednesday,
China Intelligent Connected Vehicle Technology Roadmap 1
 China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
Road Vehicle Automation: Distinguishing Reality from Hype
 Road Vehicle Automation: Distinguishing Reality from Hype Steven E. Shladover, Sc.D. California PATH Program University of California, Berkeley March 20, 2014 1 Outline Historical development of automation
Road Vehicle Automation: Distinguishing Reality from Hype Steven E. Shladover, Sc.D. California PATH Program University of California, Berkeley March 20, 2014 1 Outline Historical development of automation
NHTSA Role in The Future of Automated Vehicles
 NHTSA Role in The Future of Automated Vehicles Monday, July 15, 2013. John W. Marshall, Director Office of Safety Programs, NHTSA NHTSA s Mission Save lives, prevent injuries and reduce economic costs
NHTSA Role in The Future of Automated Vehicles Monday, July 15, 2013. John W. Marshall, Director Office of Safety Programs, NHTSA NHTSA s Mission Save lives, prevent injuries and reduce economic costs
Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted.
 Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted. Introduction Presenter Thomas Desbarats Business Development Simcenter System
Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted. Introduction Presenter Thomas Desbarats Business Development Simcenter System
ISO INTERNATIONAL STANDARD. Intelligent transport systems Adaptive Cruise Control systems Performance requirements and test procedures
 INTERNATIONAL STANDARD ISO 15622 Second edition 2010-04-15 Intelligent transport systems Adaptive Cruise Control systems Performance requirements and test procedures Systèmes intelligents de transports
INTERNATIONAL STANDARD ISO 15622 Second edition 2010-04-15 Intelligent transport systems Adaptive Cruise Control systems Performance requirements and test procedures Systèmes intelligents de transports
FUNCTIONAL SAFETY FOR AUTONOMOUS DRIVING
 FUNCTIONAL SAFETY FOR AUTONOMOUS DRIVING Dr. Justyna Zander, NVIDIA January 30, 2017 IS&T Int. Symposium on Electronic Imaging 2017; Autonomous Vehicles and Machines 2017; 29 January - 2 February, 2017
FUNCTIONAL SAFETY FOR AUTONOMOUS DRIVING Dr. Justyna Zander, NVIDIA January 30, 2017 IS&T Int. Symposium on Electronic Imaging 2017; Autonomous Vehicles and Machines 2017; 29 January - 2 February, 2017
Workshop on Automotive Stack Design Options, Platform Concept, and Cost Targets
 AUTOSTACK Workshop Feb8 th 2011, Grenoble Workshop on Automotive Stack Design Options, Platform Concept, and Cost Targets F. Finsterwalder Daimler AG Content 1. Introduction 2. Summary of system requirements
AUTOSTACK Workshop Feb8 th 2011, Grenoble Workshop on Automotive Stack Design Options, Platform Concept, and Cost Targets F. Finsterwalder Daimler AG Content 1. Introduction 2. Summary of system requirements
Test & Validation Challenges Facing ADAS and CAV
 Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Eco-Signal Operations Concept of Operations
 Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
Smart Charging and Vehicle Grid Integration Silicon Valley Leadership Group PEV Forum December 16, 2014
 Smart Charging and Vehicle Grid Integration Silicon Valley Leadership Group PEV Forum December 16, 2014 Dan Bowermaster Program Manager, Electric Transportation Office: (650) 855-8524 Mobile: (650) 701-5099
Smart Charging and Vehicle Grid Integration Silicon Valley Leadership Group PEV Forum December 16, 2014 Dan Bowermaster Program Manager, Electric Transportation Office: (650) 855-8524 Mobile: (650) 701-5099
Overview of Regulations for Autonomous Vehicles
 Overview of Regulations for Autonomous Vehicles Anders Eugensson, Director, Government Affairs, Volvo Car Corporation 1 Legal Overview The legal framework affecting autonomous driving can be divided into:
Overview of Regulations for Autonomous Vehicles Anders Eugensson, Director, Government Affairs, Volvo Car Corporation 1 Legal Overview The legal framework affecting autonomous driving can be divided into:
Our Approach to Automated Driving System Safety. February 2019
 Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Autofore. Study on the Future Options for Roadworthiness Enforcement in the European Union
 Study on the Future Options for Roadworthiness Enforcement in the European Union Agenda 1. Project background and structure 2. Recommendations 2010/2020 3. Case background current situation 4. Strategies
Study on the Future Options for Roadworthiness Enforcement in the European Union Agenda 1. Project background and structure 2. Recommendations 2010/2020 3. Case background current situation 4. Strategies
Introduction to Requirement Management for Safety-Critical Embedded Vehicle Systems
 Introduction to Requirement Management for Safety-Critical Embedded Vehicle Systems SARE-väst, Urban Ingelsson Safety-Critical Systems Competence Center urban.ingelsson@semcon.com What is functional safety?
Introduction to Requirement Management for Safety-Critical Embedded Vehicle Systems SARE-väst, Urban Ingelsson Safety-Critical Systems Competence Center urban.ingelsson@semcon.com What is functional safety?
AUTOCITS. Regulation Study for Interoperability in the Adoption the Autonomous Driving in European Urban Nodes. LISBON Pilot
 Regulation Study for Interoperability in the Adoption the Autonomous Driving in European Urban Nodes AUTOCITS LISBON Pilot Pedro Serra IPN Cristiano Premebida - UC Lisbon, October 10th LISBON PILOT 1.
Regulation Study for Interoperability in the Adoption the Autonomous Driving in European Urban Nodes AUTOCITS LISBON Pilot Pedro Serra IPN Cristiano Premebida - UC Lisbon, October 10th LISBON PILOT 1.
Systems-Theoretic Process Analysis: AUTOMOBILE FEATURES FOR LANE MANAGEMENT
 Systems-Theoretic Process Analysis: AUTOMOBILE FEATURES FOR LANE MANAGEMENT Diogo Castilho, Megan France & Dajiang Suo Image source: 1 LADAR image of London streets (The New York Times, 11/11/15) 1 MOTIVATION
Systems-Theoretic Process Analysis: AUTOMOBILE FEATURES FOR LANE MANAGEMENT Diogo Castilho, Megan France & Dajiang Suo Image source: 1 LADAR image of London streets (The New York Times, 11/11/15) 1 MOTIVATION
Autonomous Driving Technology for Connected Cars
 Autonomous Driving Technology for Connected Cars With the reduction of automobile accidents being an important concern for the motoring public, there has been a lot of activity surrounding the development
Autonomous Driving Technology for Connected Cars With the reduction of automobile accidents being an important concern for the motoring public, there has been a lot of activity surrounding the development
AND CHANGES IN URBAN MOBILITY PATTERNS
 TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
Development of California Regulations for the Testing and Operation of Automated Vehicles on Public Roads
 Development of California Regulations for the Testing and Operation of Automated Vehicles on Public Roads Steven E. Shladover, Sc.D. Christopher Nowakowski Roberto Horowitz, Ph.D. Ching-Yao Chan, Ph.D.
Development of California Regulations for the Testing and Operation of Automated Vehicles on Public Roads Steven E. Shladover, Sc.D. Christopher Nowakowski Roberto Horowitz, Ph.D. Ching-Yao Chan, Ph.D.
CONNECTED AND AUTONOMOUS VEHICLES TYLER SVITAK CONNECTED AND AUTONOMOUS TECH PROGRAM MANAGER CDOT INTELLIGENT TRANPSORTATION SYSTEMS (ITS)
") CONNECTED AND AUTONOMOUS VEHICLES TYLER SVITAK CONNECTED AND AUTONOMOUS TECH PROGRAM MANAGER CDOT INTELLIGENT TRANPSORTATION SYSTEMS (ITS) CHALLENGES Safety Congestion Air Quality Cost 700 600 500 400
CONNECTED AND AUTONOMOUS VEHICLES TYLER SVITAK CONNECTED AND AUTONOMOUS TECH PROGRAM MANAGER CDOT INTELLIGENT TRANPSORTATION SYSTEMS (ITS) CHALLENGES Safety Congestion Air Quality Cost 700 600 500 400
The IAM in Pre-Selection of global automotive trends impacting the independent multi-brand aftermarket
 The IAM in 2030 Pre-Selection of global automotive trends impacting the independent multi-brand aftermarket 10th of June 2016 The automotive aftermarket is based on a highly complex value chain with a
The IAM in 2030 Pre-Selection of global automotive trends impacting the independent multi-brand aftermarket 10th of June 2016 The automotive aftermarket is based on a highly complex value chain with a
The Future of Automotive IT: Driving Organizations, Vehicle Development, and Autonomous Vehicles
 The Future of Automotive IT: Driving Organizations, Vehicle Development, and Autonomous Vehicles Focus on the Future UM Automotive Research Conferences WELCOME! Bruce M. Belzowski University of Michigan
The Future of Automotive IT: Driving Organizations, Vehicle Development, and Autonomous Vehicles Focus on the Future UM Automotive Research Conferences WELCOME! Bruce M. Belzowski University of Michigan
Új technológiák a közlekedésbiztonság jövőjéért
 Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Partial Automation for Truck Platooning
 Partial Automation for Truck Platooning Observations and Lessons Learned to Date from California's Experience with Truck Platooning Matt Hanson 2017 ITS CA Conference September 18, 2017 Burlingame, CA
Partial Automation for Truck Platooning Observations and Lessons Learned to Date from California's Experience with Truck Platooning Matt Hanson 2017 ITS CA Conference September 18, 2017 Burlingame, CA
Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches. Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron
 Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron 1 Agenda Part1. ADAS Sensor Fusion HILS Trend 1.1 The trend of ADAS
Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron 1 Agenda Part1. ADAS Sensor Fusion HILS Trend 1.1 The trend of ADAS
Platooning using p in SARTRE project Safe Road Train for the Environment
 Ricardo plc 2009 Platooning using 802.11p in SARTRE project Safe Road Train for the Environment Erik Nordin, Project Manager, Volvo GTT (Volvo Technology, VTEC) Dept: Vehicle Technology and Safety 2 Road
Ricardo plc 2009 Platooning using 802.11p in SARTRE project Safe Road Train for the Environment Erik Nordin, Project Manager, Volvo GTT (Volvo Technology, VTEC) Dept: Vehicle Technology and Safety 2 Road
IEEE1547 Vs J3072 Vs Rule 21 Comparison
 IEEE1547 Vs J3072 Vs Rule 21 Comparison Rule 21 Working Group 3 Issue 23 Roger Salas P.E. MSEE Southern California Edison This presentation is for discussion purposes only and does not represent a final
IEEE1547 Vs J3072 Vs Rule 21 Comparison Rule 21 Working Group 3 Issue 23 Roger Salas P.E. MSEE Southern California Edison This presentation is for discussion purposes only and does not represent a final
Self Driving Vehicles: An Opportunity for Minnesota. Credit: digidreamgrafix] /FreeDigitalPhotos.Net
![Self Driving Vehicles: An Opportunity for Minnesota. Credit: digidreamgrafix] /FreeDigitalPhotos.Net](/thumbs/95/122844983.jpg "Self Driving Vehicles: An Opportunity for Minnesota. Credit: digidreamgrafix] /FreeDigitalPhotos.Net") Self Driving Vehicles: An Opportunity for Minnesota Credit: digidreamgrafix] /FreeDigitalPhotos.Net Overview Technological Context Why Self-Driving Vehicles (SDVs)? Legal Context Nationally and Minnesota
Self Driving Vehicles: An Opportunity for Minnesota Credit: digidreamgrafix] /FreeDigitalPhotos.Net Overview Technological Context Why Self-Driving Vehicles (SDVs)? Legal Context Nationally and Minnesota
C A. Right on track to enhanced driving safety. CAPS - Combined Active & Passive Safety. Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle
 Right on track to enhanced driving safety C A SP Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle 1 Outline CAPS motivation & content of activity Accident analysis & development methodology Market, drivers,
Right on track to enhanced driving safety C A SP Robert Bosch GmbH CC/PJ-CAPS: Jochen Pfäffle 1 Outline CAPS motivation & content of activity Accident analysis & development methodology Market, drivers,
Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations
: Challenges and Opportunities for Traffic Operations") NTUA Seminar Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations Toronto, 1959 Los Angeles, 2009 Alexander Skabardonis NTUA 1977, University of California, Berkeley
NTUA Seminar Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations Toronto, 1959 Los Angeles, 2009 Alexander Skabardonis NTUA 1977, University of California, Berkeley
SAFETY AND RELIABILITY ANALYSIS OF ELECTRIC POWER STEERING SYSTEM USED IN AUTOMOBILES
 SAFETY AND RELIABILITY ANALYSIS OF ELECTRIC POWER STEERING SYSTEM USED IN AUTOMOBILES A.Vanaja 1, H.Gargama 2, B. Sarvesh 3 1 M.Tech, Reliability Engg. Student, JNTUACEA Anantapuramu, Andhra Pradesh (India)
SAFETY AND RELIABILITY ANALYSIS OF ELECTRIC POWER STEERING SYSTEM USED IN AUTOMOBILES A.Vanaja 1, H.Gargama 2, B. Sarvesh 3 1 M.Tech, Reliability Engg. Student, JNTUACEA Anantapuramu, Andhra Pradesh (India)
The connected vehicle is the better vehicle!
 AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
- Status Report - System Power Determination of Electrified (Light Duty) Vehicles. Subgroup Leader: Germany, Korea. EVE-17 meeting
 Vehicles. Subgroup Leader: Germany, Korea. EVE-17 meeting") System Power Determination of Electrified (Light Duty) Vehicles - Status Report - Subgroup Leader: Germany, Korea EVE-17 meeting Geneva - January 11, 2016 Outline 1. Status: Screening of methods for determination
System Power Determination of Electrified (Light Duty) Vehicles - Status Report - Subgroup Leader: Germany, Korea EVE-17 meeting Geneva - January 11, 2016 Outline 1. Status: Screening of methods for determination
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions
 Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
Using Virtualization to Accelerate the Development of ADAS & Automated Driving Functions GTC Europe 2017 Dominik Dörr 2 Motivation Virtual Prototypes Virtual Sensor Models CarMaker and NVIDIA DRIVE PX
NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration
 National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
University Of California, Berkeley Department of Mechanical Engineering. ME 131 Vehicle Dynamics & Control (4 units)
") CATALOG DESCRIPTION University Of California, Berkeley Department of Mechanical Engineering ME 131 Vehicle Dynamics & Control (4 units) Undergraduate Elective Syllabus Physical understanding of automotive
CATALOG DESCRIPTION University Of California, Berkeley Department of Mechanical Engineering ME 131 Vehicle Dynamics & Control (4 units) Undergraduate Elective Syllabus Physical understanding of automotive
Low Carbon Vehicle Technology Program
 Low Carbon Vehicle Technology Program Workstream 6: Vehicle Supervisory Control (VSC) Date: 18 th May 2011 Speaker: Cian Harrington, Cranfield University Workstream team members: Jaguar Land Rover, Ricardo,
Low Carbon Vehicle Technology Program Workstream 6: Vehicle Supervisory Control (VSC) Date: 18 th May 2011 Speaker: Cian Harrington, Cranfield University Workstream team members: Jaguar Land Rover, Ricardo,
Near-Term Automation Issues: Use Cases and Standards Needs
 Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
UL Standards Activity. Ken Boyce, Underwriters Laboratories
 UL Standards Activity Ken Boyce, Underwriters Laboratories EV standards development Many parties developing EV/LEV product standards including IEC, ISO, NFPA, SAE, UL Focus of these standards reflect different
UL Standards Activity Ken Boyce, Underwriters Laboratories EV standards development Many parties developing EV/LEV product standards including IEC, ISO, NFPA, SAE, UL Focus of these standards reflect different
Legal Aspects of Active Safety Systems. Tom Gasser, Bundesanstalt für Straßenwesen (BASt) interactive Final Event
 interactive Final Event") Legal Aspects of Active Safety Systems Tom Gasser, Bundesanstalt für Straßenwesen (BASt) interactive Final Event 20 th -21 st November 2013 Contents Approach and scope of legal evaluation Important results:
Legal Aspects of Active Safety Systems Tom Gasser, Bundesanstalt für Straßenwesen (BASt) interactive Final Event 20 th -21 st November 2013 Contents Approach and scope of legal evaluation Important results: