Microactuators. G.K. Ananthasuresh Professor, Mechanical Engineering Indian Institute of Science Bangalore, , India
|
|
|
- Matthew Francis
- 5 years ago
- Views:
Transcription
1 Microactuators G.K. Ananthasuresh Professor, Mechanical Engineering Indian Institute of Science Bangalore, , India
2 What are actuators? Actuators use input energy and release output energy in a controlled manner. Mechanical actuators act upon something and move it with force or torque. There are many types of actuators. Based on the type of output energy released Based on the way output energy is released Based on the input energy used
3 Actuators are transducers. Transducers covert one form of energy to another form. Input energy Actuator Output energy Mechanical Optical Radiation Acoustic Fields

4 Actuators with different output energies Mechanical actuators Produce motion Motors, engines, pumps Acoustic actuators Produce sound Optical actuators Produce light LEDs, solid state lasers Others Radiation Fields
5 An actuator s output is usually mechanical. Actuators usually covert input energy into controlled mechanical energy. Input energy Mechanical actuators Output energy Motion Force/torque Resonance Oscillations Deformations etc.
6 Microactuators Produce motions over small distances. Of the order of microns to mm. Produce small forces. Of the order of pn to mn. Produce motion and force in entities of small sizes.

7 Microactuator universe: displacements Bell et al., 2005 J. Micromechanics and Microengineering Displacement resolution Maximum displacement
8 Microactuator universe: forces Bell et al., 2005 J. Micromechanics and Microengineering Maximum force Maximum displacement

9 Biological microactuators: displacements Vliet et al., 2003 Acta Materialia.

10 Biological actuators: forces Vliet et al., 2003 Acta Materialia.
11 Mechanical micro actuators with different input energies and how they are used. Electrostatic Electro magnet based Thermal Chemical Piezo electric Shape memory alloy (SMA) Smart material based Light induced Biological
 Smart material")
12 Mechanical micro actuators with different input energies and how they are used. Electrostatic Electro magnet based Thermal Chemical Piezo electric Shape memory alloy (SMA) Smart material based Light induced Biological
13 Mechanical micro actuators with different input energies and how they are used. Electrostatic Electro magnet based Thermal Chemical Piezo electric Shape memory alloy (SMA) Smart material based Light induced Biological
14 Mechanical micro actuators with different input energies and how they are used. Electrostatic Electro magnet based Thermal Chemical Piezo electric Shape memory alloy (SMA) Smart material based Light induced Biological
15 Mechanical micro actuators with different input energies and how they are used. Electrostatic Electro magnet based Thermal Chemical Piezo electric Shape memory alloy (SMA) Smart material based Light induced Biological
 Smart material based Light induced")
16 Mechanical micro actuators with different input energies and how they are used. Electrostatic Electro magnet based Thermal Chemical Piezo electric Shape memory alloy (SMA) Smart material based Light induced Biological A normally open valve;
17 Mechanical micro actuators with different input energies and how they are used. Electrostatic Electro magnet based Thermal Chemical Piezo electric Shape memory alloy (SMA) Smart material based Light induced Biological
 Smart material")
18 Mechanical micro actuators with different input energies and how they are used. Electrostatic Electro magnet based Thermal Chemical Piezo electric Shape memory alloy (SMA) Smart material based Light induced Biological
 Smart material based")
19 Mechanical micro actuators with different input energies and how they are used. Electrostatic Electro magnet based Thermal Chemical Piezo electric Shape memory alloy (SMA) Smart material based Light induced Biological Tan et al. (2003)
20 Characteristics of a mechanical (micro)actuator Stroke Force/torque Stiffness Input energy Efficiency Linearity Hysteresis Response time Drift Bandwidth The maximum displacement possible with an actuator.
21 Characteristics of a mechanical (micro)actuator Stroke Force/torque Stiffness Input energy Efficiency Linearity Hysteresis Response time Drift Bandwidth Maximum force/torque generated by an actuator.
22 Characteristics of a mechanical (micro)actuator Stroke Force/torque Stiffness Input energy Efficiency Linearity Hysteresis Response time Drift Bandwidth The rate at which the generated force/torque decreases with stroke.
23 Characteristics of a mechanical (micro)actuator Stroke Force/torque Stiffness Input energy Efficiency Linearity Hysteresis Response time Drift Bandwidth The energy (e.g., voltage current) given to the actuator.
24 Characteristics of a mechanical (micro)actuator Stroke Force/torque Stiffness Input energy Efficiency Linearity Hysteresis Response time Drift Bandwidth The ration of the released energy to the input energy.
25 Characteristics of a mechanical (micro)actuator Stroke Force/torque Stiffness Input energy Efficiency Linearity Hysteresis Response time Drift Bandwidth The extent to which the force and stroke are linear. Ideally, we want constant force.
26 Characteristics of a mechanical (micro)actuator Stroke Force/torque Stiffness Input energy Efficiency Linearity Hysteresis Response time Drift Bandwidth The difference in displacement/force for the same values of input energy in up and down strokes.
27 Characteristics of a mechanical (micro)actuator Stroke Force/torque Stiffness Input energy Efficiency Linearity Hysteresis Response time Drift Bandwidth The time taken for the actuator to respond from the instant the input signal is given.
28 Characteristics of a mechanical (micro)actuator Stroke Force/torque Stiffness Input energy Efficiency Linearity Hysteresis Response time Drift Bandwidth The unintended shift in force or displacement even when the input energy is steady.
29 Characteristics of a mechanical (micro)actuator Stroke Force/torque Stiffness Input energy Efficiency Linearity Hysteresis Response time Drift Bandwidth The frequencies at which the actuator can reliably provide the rated displacement and force.
30 Some microactuators Electrostatic micromotors Electrostatic comb drive Magnetic actuators Thermal microactuators Pneumatic actuators Piezoelectric actuators Surface tension driven fluidic actuators
 Sandia National Laboratories")
31 Electrostatic comb drive Lee et al. ( ) Sandia National Laboratories (after 2000)


32 Comb drive: a schematic


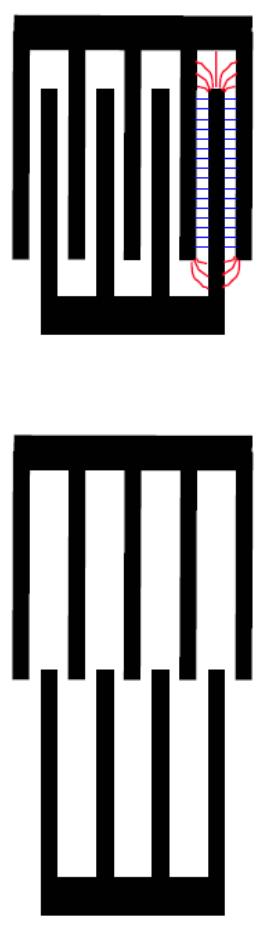
33 Getting linearity
34 Why is electrostatic force the most popular in microactuators? E t Young s modulus Width of the suspension beams 3 2Etw k 3 l N 0tV Fe 2g 2 w l Lumped mechanical stiffness of the suspension Electrostatic force Thickness of beams Length of the suspension beams g N V Gap between comb fingers Number of comb pairs Voltage F N V l k 4E gw 2 3 e N 0V l l 4E gw V 3 L 2 3 4E gw 2 l N 0 l Deflection of the shuttle Scaling of relative deflection with size for fixed voltage L Scaling of voltage for fixed relative deflection


35 Electrostatic micro motors There was a race between U.C. Berkeley and MIT to make the first rotary motor in silicon.

")
36 Harmonic micro motor (MIT)

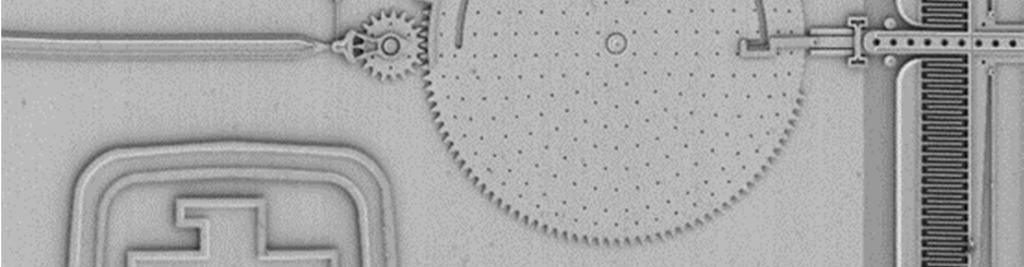
37 Micro gear train (Bell Labs)


38 Micromechanical lock (Sandia) Pin in a maze

39 SUMMiT of Sandia


40 Sandia s microengine gear train


41 Inertial forces can be significant. The inertia may be insignificant but velocities are relatively huge (million rpm is not uncommon). Therefore, inertial forces could be substantial. Figures: courtesy of Sandia National Laboratory

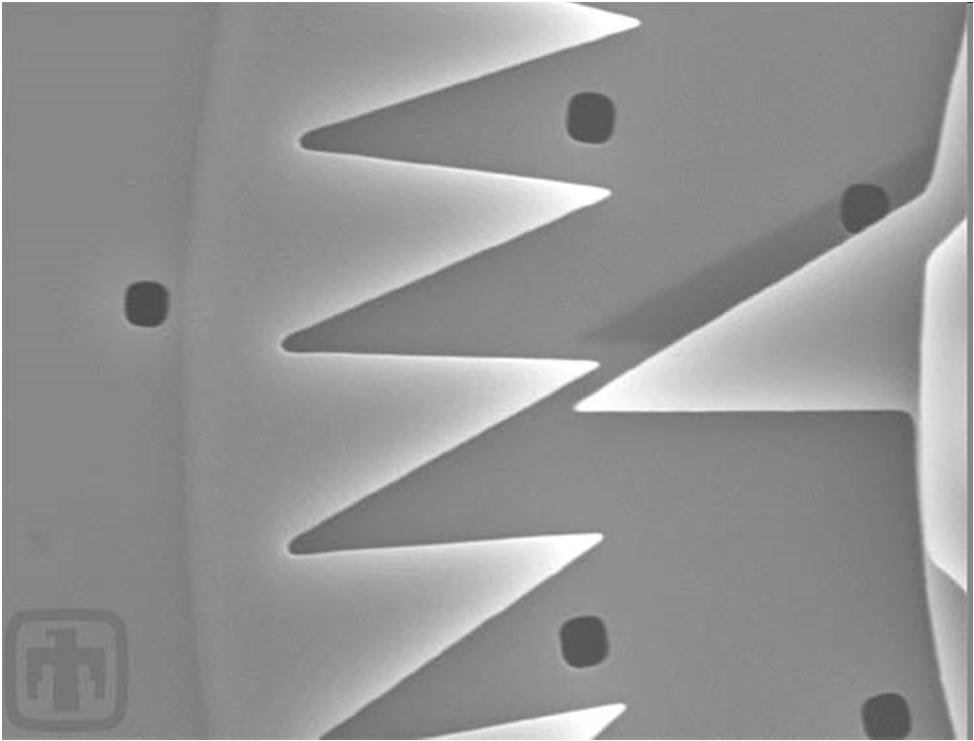
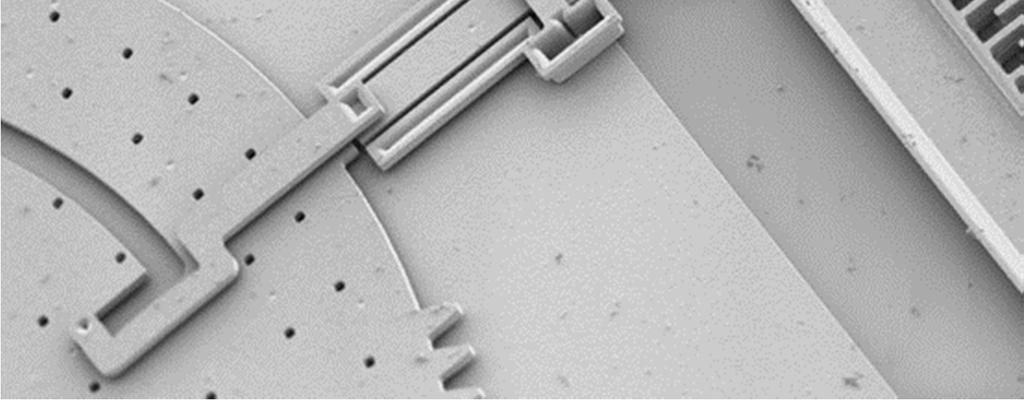
42 Wedge motor of Sandia


43 Our prime mover linkage c/o micro
44 Is electro magnet force not scalable to micro? Electromagnetic force between two coils F 0 2 l II 1 2 d Case 1: Constant current density I J constant = I L F L A Case 2: Constant temperature rise cs J A k T J I L F L L 2 2 s Very, very bad Bad
45 Is electro magnet force not scalable to micro? Between a coil and a permanent magnet F Il B Case 1: Constant current density I J cosntant = I L F L A Case 2: Constant temperature rise cs J A k T J I L F L L 2 2 s Very bad Still bad But with a powerful magnet, one can manage good magnitude of force.




46 Magnetic actuation based pump Kim, Ananthasuresh, and Bau, Balaji and Ananthasuresh,


47 Coils on the chip Fabrication of micro coils is possible but it increases the process complexity. Ahn and Allen, 1993, JMEMS

 Bends")

 Parallel")



48 Electro thermal actuation V Cold Hot Bends upwards (Made with PennSOIL) Bends downwards V Undoped Hot Cold (Comtois and Bright s heatuator, 1994) Parallel connection reversed bending Selective doping gives the same effect Bend upwards Many variations with shape, doping, electrical and thermal boundary conditions



49 Enhanced thermal expansion Expansion building block Deformed (Made using MUMPs) (Moulton and Ananthasuresh, 2000)


50 Electro thermally actuated parallel linkages Moulton, Li, and Ananthasuresh, 2001
51 Piezoelectric actuators Active materials that generate electric charge with mechanical strain and vice versa. Typically, have large forces but very small displacements. Usually, used in bimorph mode. Give precise motions. Require large voltages to operate. 800 N Stiffness = 32 N/um Piezo-stack actuator 800 N block force. 25 microns displacement. Force 25 um Displacement
52 Thermo pneumatic actuation A normally closed fluidic valve Trapped fluid Glass Silicon Glass Flow

53 Thermo pneumatic actuation Redwood Microsystems s thermo-pneumatic normally closed valve

54 Pneumatic actuation C. J. Kim, UCLA Bi-metal cantilevers curled due to residual stress. Opened with actuating the bottom membrane



55 Other ways of micro actuation (IISc) I Cell probed with a single contact I Compliant micro mechanism x x O I Input ports actuated by fine-motion stages O Output ports in contact with cell x Observation ports for tracking and force computation x^ ^y ^z Light source Tiltable arm Cell grasped with two contacts for manipulation Compliant micro mechanism I x O O x I Fine motion stage I I Gross motion stage z y x Circular motion stage Controller Microscope Haptic interface for human operator CCD camera PC Image processing Computation of forces and displacements I/O to controller and haptic interface




56 Microactuation with precision stages (IISc) Zebrafish embryo Bio-cell Micromanipulation Setup Close-up of the gripper holding zebrafish embryo PDMS miniature compliant gripper
57 Novel digital speakers Digital reproduction of sound (DRS) Analog Advantages of DRS: Large dynamic range is not necessary. Digital Nonlinearity can be controlled distortion is minimized. Fault tolerance. Intensity control. Speaklets are combined to produce the sound effect. With low-pass filters, the sound is smoothened. Diamond et al., 2003

58 Surface driven flows Several actuation modes by changing surface tension: chemical, thermal, electrical, etc. Cho, Moon, Kim, (JMEMS, 2003) Digital Microfluidics by surface tension driven droplets


 Power on a chip")

59 Power on a chip: MIT microengine A microengine can be made with the same power density as that of a big gas turbine engine. MIT Microengine (Source: Epstein, 2003) Power on a chip Demo engine with H 2 fuel Turbine-compressor test Detail of the DRIEetched blades

 A dielectric elastomer with 200%")
60 Smart actuator example S. Dubowsky s group at MIT: Microbot space explorer Supported by NASA Institute for Advanced Research (NIAC) A dielectric elastomer with 200% strain to help microbot hop.


61 Micro actuation macro effect
62 Main points Characteristics of actuators Miniaturization is necessary Because we need to move solids and make the fluids flow. Status Electrostatic actuation is good for sensors. Thermal, magnetic, pneumatic are for real actuation. Piezo and voice coil (electro magnet)are used for precision motion. SMA and other active materials are for special needs. Micro fluidics is going for surface tension, electrophoresis, electroosmosis, etc. Commercial microactuators are not available as standalone devices. Piezo stack actuators are available in large sizes. Much more research is needed on actuators.
MECHATRONICS LAB MANUAL
 MECHATRONICS LAB MANUAL T.E.(Mechanical) Sem-VI Department of Mechanical Engineering SIESGST, Nerul, Navi Mumbai LIST OF EXPERIMENTS Expt. No. Title Page No. 1. Study of basic principles of sensing and
MECHATRONICS LAB MANUAL T.E.(Mechanical) Sem-VI Department of Mechanical Engineering SIESGST, Nerul, Navi Mumbai LIST OF EXPERIMENTS Expt. No. Title Page No. 1. Study of basic principles of sensing and
Other actuators. Kon Mechatronic Sensors and Actuators Tapio Lantela,
 Other actuators Kon-41.3140 Mechatronic Sensors and Actuators Tapio Lantela, Overview of lecture Pneumatics Linear motion with electromagnetic devices - Conversion from rotary motion - Solenoid - Voice
Other actuators Kon-41.3140 Mechatronic Sensors and Actuators Tapio Lantela, Overview of lecture Pneumatics Linear motion with electromagnetic devices - Conversion from rotary motion - Solenoid - Voice
Load Analysis and Multi Body Dynamics Analysis of Connecting Rod in Single Cylinder 4 Stroke Engine
 IJSRD - International Journal for Scientific Research & Development Vol. 3, Issue 08, 2015 ISSN (online): 2321-0613 Load Analysis and Multi Body Dynamics Analysis of Connecting Rod in Single Cylinder 4
IJSRD - International Journal for Scientific Research & Development Vol. 3, Issue 08, 2015 ISSN (online): 2321-0613 Load Analysis and Multi Body Dynamics Analysis of Connecting Rod in Single Cylinder 4
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur
 Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture 04 Actuation So, this particular lecture is on actuation.
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture 04 Actuation So, this particular lecture is on actuation.
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Force/Torque Sensors Force/Torque Sensors http://robotiq.com/products/robotics-force-torque-sensor/ 3 Force/Torque Sensors Many Force/Torque (FT)
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Force/Torque Sensors Force/Torque Sensors http://robotiq.com/products/robotics-force-torque-sensor/ 3 Force/Torque Sensors Many Force/Torque (FT)
HIGHLY-COMPACT SMA ACTUATORS A Feasibility Study of Fuel-Powered and Thermoelectric SMA Actuators
 HIGHLY-COMACT SMA ACTUATORS A Feasibility Study of Fuel-owered and Thermoelectric s 1. Objectives The main goal of this project is to perform a feasibility study on Fuel-owered and Thermoelectric Shape
HIGHLY-COMACT SMA ACTUATORS A Feasibility Study of Fuel-owered and Thermoelectric s 1. Objectives The main goal of this project is to perform a feasibility study on Fuel-owered and Thermoelectric Shape
MICROPUMPS FOR MEDICAL APPLICATIONS
 MICROPUMPS FOR MEDICAL APPLICATIONS Krassimir Hristov Denishev 1, Boryana Boyanova Trencheva 2 1 Department Microelectronics, Technical University Sofia, Kl. Ohridski Str. 8, bl. 1, 1797 Sofia, Bulgaria,
MICROPUMPS FOR MEDICAL APPLICATIONS Krassimir Hristov Denishev 1, Boryana Boyanova Trencheva 2 1 Department Microelectronics, Technical University Sofia, Kl. Ohridski Str. 8, bl. 1, 1797 Sofia, Bulgaria,
Hybrid MEMS Pneumatic Proportional Control Valve
 Marquette University Milwaukee School of Engineering Purdue University University of California, Merced University of Illinois, Urbana-Champaign University of Minnesota Vanderbilt University Hybrid MEMS
Marquette University Milwaukee School of Engineering Purdue University University of California, Merced University of Illinois, Urbana-Champaign University of Minnesota Vanderbilt University Hybrid MEMS
Microhydraulic Actuation
 Materials Integration: from Nanoscale to Waferscale Microhydraulic Actuation This material is based upon work supported by the Assistant Secretary of Defense for Research and Engineering under Air Force
Materials Integration: from Nanoscale to Waferscale Microhydraulic Actuation This material is based upon work supported by the Assistant Secretary of Defense for Research and Engineering under Air Force
DESIGN AND SIMULATION OF MEMS BASED MICRO MOTORS
 Int. J. Chem. Sci.: 14(2), 2016, 1105-1112 ISSN 0972-768X www.sadgurupublications.com DESIGN AND SIMULATION OF MEMS BASED MICRO MOTORS K. BALACHANDAR *, V. BALAJI, D. PREM KUMAR and S. ARUN KUMAR Department
Int. J. Chem. Sci.: 14(2), 2016, 1105-1112 ISSN 0972-768X www.sadgurupublications.com DESIGN AND SIMULATION OF MEMS BASED MICRO MOTORS K. BALACHANDAR *, V. BALAJI, D. PREM KUMAR and S. ARUN KUMAR Department
Surface MEMS Design Examples Dr. Lynn Fuller Webpage:
 ROCHESTER INSTITUTE OF TECHNOLOGY MICROELECTRONIC ENGINEERING Surface MEMS Design Examples Webpage: http://people.rit.edu/lffeee 82 Lomb Memorial Drive Rochester, NY 14623-5604 Tel (585) 475-2035 Email:
ROCHESTER INSTITUTE OF TECHNOLOGY MICROELECTRONIC ENGINEERING Surface MEMS Design Examples Webpage: http://people.rit.edu/lffeee 82 Lomb Memorial Drive Rochester, NY 14623-5604 Tel (585) 475-2035 Email:
Air Bearing Shaker for Precision Calibration of Accelerometers
 Air Bearing Shaker for Precision Calibration of Accelerometers NOMENCLATURE Jeffrey Dosch PCB Piezotronics 3425 Walden Avenue, Depew NY DUT Device Under Test S B DUT sensitivity to magnetic field [(m/sec
Air Bearing Shaker for Precision Calibration of Accelerometers NOMENCLATURE Jeffrey Dosch PCB Piezotronics 3425 Walden Avenue, Depew NY DUT Device Under Test S B DUT sensitivity to magnetic field [(m/sec
1. This question is about electrical energy and associated phenomena.
 1. This question is about electrical energy and associated phenomena. Electromagnetism The current in the circuit is switched on. electromagnet State Faraday s law of electromagnetic induction and use
1. This question is about electrical energy and associated phenomena. Electromagnetism The current in the circuit is switched on. electromagnet State Faraday s law of electromagnetic induction and use
MEMS Vibrational Energy Harvester for Wireless Sensor Power
 MEMS Vibrational Energy Harvester for Wireless Sensor Power Dr. Mark Boysel, CTO Mary Boysel, President and CEO MCB Clean Room Solutions 13 October 2011 1 Micro-Vibrational Energy Harvester (µveh) MCB
MEMS Vibrational Energy Harvester for Wireless Sensor Power Dr. Mark Boysel, CTO Mary Boysel, President and CEO MCB Clean Room Solutions 13 October 2011 1 Micro-Vibrational Energy Harvester (µveh) MCB
Fluidic Stochastic Modular Robotics: Revisiting the System Design
 Fluidic Stochastic Modular Robotics: Revisiting the System Design Viktor Zykov Hod Lipson Computational Synthesis Cornell University Grand Challenges in the Area of Self-Reconfigurable Modular Robots Self-repair
Fluidic Stochastic Modular Robotics: Revisiting the System Design Viktor Zykov Hod Lipson Computational Synthesis Cornell University Grand Challenges in the Area of Self-Reconfigurable Modular Robots Self-repair
EMaSM. Outcome 1 Mechanical Measurement
 EMaSM Outcome 1 Mechanical Measurement Some types of mechanical measurement can be awkward. Some require physical modification to the system under measurement. One example is the measurement of pneumatic
EMaSM Outcome 1 Mechanical Measurement Some types of mechanical measurement can be awkward. Some require physical modification to the system under measurement. One example is the measurement of pneumatic
Modeling and Optimization of a Linear Electromagnetic Piston Pump
 Fluid Power Innovation & Research Conference Minneapolis, MN October 10 12, 2016 ing and Optimization of a Linear Electromagnetic Piston Pump Paul Hogan, MS Student Mechanical Engineering, University of
Fluid Power Innovation & Research Conference Minneapolis, MN October 10 12, 2016 ing and Optimization of a Linear Electromagnetic Piston Pump Paul Hogan, MS Student Mechanical Engineering, University of
Smart Automated Vent Register Using an SMA Spring Actuated Rotary Ratchet
 Smart Automated Vent Register Using an SMA Spring Actuated Rotary Ratchet Mary Molepske, Victor Braciszewski, James Butler, Gregory Caputo, Fan-Ning Cheng, WonHee Kim, Jonathan Luntz, Diann Brei ABSTRACT
Smart Automated Vent Register Using an SMA Spring Actuated Rotary Ratchet Mary Molepske, Victor Braciszewski, James Butler, Gregory Caputo, Fan-Ning Cheng, WonHee Kim, Jonathan Luntz, Diann Brei ABSTRACT
MINIATURE SIZE BENCHMARK STRENGTH PRECISION
 Piezo LEGS motors MINIATURE SIZE BENCHMARK STRENGTH PRECISION High Performance in a Compact Space Optics, lasers and photonics An ever expanding high-tech sector is characterized by many new instrument
Piezo LEGS motors MINIATURE SIZE BENCHMARK STRENGTH PRECISION High Performance in a Compact Space Optics, lasers and photonics An ever expanding high-tech sector is characterized by many new instrument
Actuators are the muscles of robots.
 6.1 INTRODUCTION Actuators are the muscles of robots. Several types of actuator noteworthy? Electric motors? Servomotors? Stepper motors? Direct-drive electric motors? Hydraulic actuators? Pneumatic actuators?
6.1 INTRODUCTION Actuators are the muscles of robots. Several types of actuator noteworthy? Electric motors? Servomotors? Stepper motors? Direct-drive electric motors? Hydraulic actuators? Pneumatic actuators?
Ch 4 Motor Control Devices
 Ch 4 Motor Control Devices Part 1 Manually Operated Switches 1. List three examples of primary motor control devices. (P 66) Answer: Motor contactor, starter, and controller or anything that control the
Ch 4 Motor Control Devices Part 1 Manually Operated Switches 1. List three examples of primary motor control devices. (P 66) Answer: Motor contactor, starter, and controller or anything that control the
Uncommon actuators in Robotic. Lukas Kopecny Brno University of Technology Czech Republic
 Uncommon actuators in Robotic Lukas Kopecny Brno University of Technology Czech Republic Why uncomon actuators? Common actuators Rigid Bulky (gearboxes) Problematic interaction Expensive Heavy Uncommon
Uncommon actuators in Robotic Lukas Kopecny Brno University of Technology Czech Republic Why uncomon actuators? Common actuators Rigid Bulky (gearboxes) Problematic interaction Expensive Heavy Uncommon
Large Area and Fine Pitch testing using Silicon Micro-cantilever
 Large Area and Fine Pitch testing using Silicon Micro-cantilever June 3 rd 2003 Kim, DONG IL Tel : +82-31-217-6168 Fax : +82-31-217-6169 E-mail : dikim@amst.co.kr Contents 1. Company Introduction 2. Silicon
Large Area and Fine Pitch testing using Silicon Micro-cantilever June 3 rd 2003 Kim, DONG IL Tel : +82-31-217-6168 Fax : +82-31-217-6169 E-mail : dikim@amst.co.kr Contents 1. Company Introduction 2. Silicon
2F MEMS Proportional Pneumatic Valve
 2F MEMS Proportional Pneumatic Valve Georgia Institute of Technology Milwaukee School of Engineering North Carolina A&T State University Purdue University University of Illinois, Urbana-Champaign University
2F MEMS Proportional Pneumatic Valve Georgia Institute of Technology Milwaukee School of Engineering North Carolina A&T State University Purdue University University of Illinois, Urbana-Champaign University
Transmitters. Differential Pressure Transmitters Pneumatic Design FOXBORO 13A D/P Cell
 Transmitters Differential Pressure Transmitters Pneumatic Design FOXBORO 13A D/P Cell Oldest design, developed during WW 2. Can be used for flow, level, and pressure, vent low side. Several ranges 0 to
Transmitters Differential Pressure Transmitters Pneumatic Design FOXBORO 13A D/P Cell Oldest design, developed during WW 2. Can be used for flow, level, and pressure, vent low side. Several ranges 0 to
Lecture 3.3. Velocity, motion, force and pressure sensors
 1. Tachogenerator Lecture 3.3 Velocity, motion, force and pressure sensors Figure 2.4.1 Principle of working of Techogenerator[1] Tachogenerator works on the principle of variable reluctance. It consists
1. Tachogenerator Lecture 3.3 Velocity, motion, force and pressure sensors Figure 2.4.1 Principle of working of Techogenerator[1] Tachogenerator works on the principle of variable reluctance. It consists
Lecture 19. Magnetic Bearings
 Lecture 19 Magnetic Bearings 19-1 Magnetic Bearings It was first proven mathematically in the late 1800s by Earnshaw that using only a magnet to try and support an object represented an unstable equilibrium;
Lecture 19 Magnetic Bearings 19-1 Magnetic Bearings It was first proven mathematically in the late 1800s by Earnshaw that using only a magnet to try and support an object represented an unstable equilibrium;
Fig Electromagnetic Actuator
 This type of active suspension uses linear electromagnetic motors attached to each wheel. It provides extremely fast response, and allows regeneration of power consumed by utilizing the motors as generators.
This type of active suspension uses linear electromagnetic motors attached to each wheel. It provides extremely fast response, and allows regeneration of power consumed by utilizing the motors as generators.
Miniature Aerial Vehicle. Lecture 4: MEMS. Design Build & Fly MIT Lecture 4 MEMS. IIT Bombay
 Lecture 4 MEMS MEMS Micro Electrical Mechanical Systems Practice of making and combining miniaturized mechanical and electrical components Micromachines in Japan Microsystems Technology in Europe MEMS
Lecture 4 MEMS MEMS Micro Electrical Mechanical Systems Practice of making and combining miniaturized mechanical and electrical components Micromachines in Japan Microsystems Technology in Europe MEMS
pressure transducer Miniature pressure transducer model 81530
 Section 8.1 8.2 8.3 High Pressure transducer model 8201 N Miniature pressure transducer model 81530 pressure transducer model 8221 Pressure Transducers 8103-8107 Pressure transducers / pressure transmitters
Section 8.1 8.2 8.3 High Pressure transducer model 8201 N Miniature pressure transducer model 81530 pressure transducer model 8221 Pressure Transducers 8103-8107 Pressure transducers / pressure transmitters
Performance Comparison of Novel Thin Miniaturized Piezo Actuated Dual Cooled Jet
 Performance Comparison of Novel Thin Miniaturized Piezo Actuated Dual Cooled Jet Today: Blowers Tomorrow: Dual Cooled Jet Peter de Bock GE Global Research Dual Cooled Jets What are they? Microfluidic device
Performance Comparison of Novel Thin Miniaturized Piezo Actuated Dual Cooled Jet Today: Blowers Tomorrow: Dual Cooled Jet Peter de Bock GE Global Research Dual Cooled Jets What are they? Microfluidic device
A Simple and Scalable Force Actuator
 A Simple and Scalable Force Actuator Eduardo Torres-Jara and Jessica Banks Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 200 Technology Square, Cambridge,
A Simple and Scalable Force Actuator Eduardo Torres-Jara and Jessica Banks Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 200 Technology Square, Cambridge,
STI LVDT Displacement Sensors
 STI LVDT Displacement Sensors The LVDT Still the most reliable and widely used displacement transducer available today. The best performance to cost ratio of any of its rival products in today s market.
STI LVDT Displacement Sensors The LVDT Still the most reliable and widely used displacement transducer available today. The best performance to cost ratio of any of its rival products in today s market.
Modeling and Optimization of a Linear Electromagnetic Piston Pump
 Fluid Power Innovation & Research Conference Minneapolis, MN October 10 12, 2016 ing and Optimization of a Linear Electromagnetic Piston Pump Paul Hogan, MS Student Mechanical Engineering, University of
Fluid Power Innovation & Research Conference Minneapolis, MN October 10 12, 2016 ing and Optimization of a Linear Electromagnetic Piston Pump Paul Hogan, MS Student Mechanical Engineering, University of
Determination of Spring Modulus for Several Types of Elastomeric Materials (O-rings) and Establishment of an Open Database For Seals*
 and Establishment of an Open Database For Seals*") Determination of Spring Modulus for Several Types of Elastomeric Materials (O-rings) and Establishment of an Open Database For Seals* W. M. McMurtry and G. F. Hohnstreiter Sandia National Laboratories,
Determination of Spring Modulus for Several Types of Elastomeric Materials (O-rings) and Establishment of an Open Database For Seals* W. M. McMurtry and G. F. Hohnstreiter Sandia National Laboratories,
USV Ultra Shear Viscometer
 USV Ultra Shear Viscometer A computer controlled instrument capable of fully automatic viscosity measurements at 10,000,000 reciprocal seconds Viscosity measurement background Accurate measurement of dynamic
USV Ultra Shear Viscometer A computer controlled instrument capable of fully automatic viscosity measurements at 10,000,000 reciprocal seconds Viscosity measurement background Accurate measurement of dynamic
Department of Mechanical Engineering Page 1 of 13
 REVIEW OF SENSORS AND ACTUATORS 1.0 INTRODUCTION Sensors and actuators are two critical components of every closed loop control system. Such a system is also called a mechatronics system. A typical mechatronics
REVIEW OF SENSORS AND ACTUATORS 1.0 INTRODUCTION Sensors and actuators are two critical components of every closed loop control system. Such a system is also called a mechatronics system. A typical mechatronics
Construction of Magnetic Buzzer
 Construction of Magnetic Buzzer Construction of Magnetic Buzzer Operation principles and construction These types of electro magnetic transducer(as Fig.1)contain coils which are would in such a manner
Construction of Magnetic Buzzer Construction of Magnetic Buzzer Operation principles and construction These types of electro magnetic transducer(as Fig.1)contain coils which are would in such a manner
Design Considerations of Piezo Stepping Actuator
 Design Considerations of Piezo Stepping Actuator Ashwin Frank Lobo 1, Md Abdul Raheman 2, Muralidhara 3, Rathnamala Rao 4 PG Student, Department of Electrical and Electronics Engineering, NMAMIT, Nitte,
Design Considerations of Piezo Stepping Actuator Ashwin Frank Lobo 1, Md Abdul Raheman 2, Muralidhara 3, Rathnamala Rao 4 PG Student, Department of Electrical and Electronics Engineering, NMAMIT, Nitte,
Electromagnetic actuation. technologies. Prof Phil Mellor
 Electromagnetic actuation technologies Prof Phil Mellor Department of Electrical and Electronic Engineering 2 Overview Review developments in electromagnetic actuation More electric aircraft Our research
Electromagnetic actuation technologies Prof Phil Mellor Department of Electrical and Electronic Engineering 2 Overview Review developments in electromagnetic actuation More electric aircraft Our research
Compressive and Shear Analysis of Rubber Block Under Large Strain
 American Journal of Applied Sciences 10 (7): 681-687, 2013 ISSN: 1546-9239 2013 Sridharan and Sivaramakrishnan, This open access article is distributed under a Creative Commons Attribution (CC-BY) 3.0
American Journal of Applied Sciences 10 (7): 681-687, 2013 ISSN: 1546-9239 2013 Sridharan and Sivaramakrishnan, This open access article is distributed under a Creative Commons Attribution (CC-BY) 3.0
Hybrid MEMS Proportional Pneumatic Valve Project 16HS1
 Marquette University Milwaukee School of Engineering Purdue University University of California, Merced University of Illinois, Urbana-Champaign University of Minnesota Vanderbilt University Hybrid MEMS
Marquette University Milwaukee School of Engineering Purdue University University of California, Merced University of Illinois, Urbana-Champaign University of Minnesota Vanderbilt University Hybrid MEMS
Magnetic spring characteristic of an oscillatory actuator with silicone rubber torsion springs. for optical scanner applications. and Zhihui Duan b,
 Magnetic spring characteristic of an oscillatory actuator with silicone rubber torsion springs for optical scanner applications Yinggang Bu a,*, Hideyuki Kinjo a, Kazuaki Oyaizu a, Kaname Inoue a, Tsutom
Magnetic spring characteristic of an oscillatory actuator with silicone rubber torsion springs for optical scanner applications Yinggang Bu a,*, Hideyuki Kinjo a, Kazuaki Oyaizu a, Kaname Inoue a, Tsutom
Measurements Lab (620451):
:") Measurements Lab (620451): To introduce the practical side of actuators and sensors, also helping to understand how that device can be used. 1. INTRODUCTION FOR MEASURMENT 2. NOISE MEASUREMENT 3. PIEZO-ELECTRIC
Measurements Lab (620451): To introduce the practical side of actuators and sensors, also helping to understand how that device can be used. 1. INTRODUCTION FOR MEASURMENT 2. NOISE MEASUREMENT 3. PIEZO-ELECTRIC
Position Control Hard chrome-plated carbon steel piston rod with blackened threads and wrench flats Sintered bronze rod bushing Internally lubricated
 Position Control System Products Cylinders 7.3-7.9 Cylinder Rod Lock 7.10-7.11 Cylinder Accessories 7.12-7.15 Pneu-Turn 7.16-7.24 Position Control System 7.25-7.36 Digital Panel Meter 7.37-7.42 Electronic
Position Control System Products Cylinders 7.3-7.9 Cylinder Rod Lock 7.10-7.11 Cylinder Accessories 7.12-7.15 Pneu-Turn 7.16-7.24 Position Control System 7.25-7.36 Digital Panel Meter 7.37-7.42 Electronic
Schedule of Events. Mech 1751: Introduction to Mechatronics. What is an actuator? Electric Actuators and Drives. Actuators. Dr. Stefan B.
 Schedule of Events Week Date Content Assignment Notes Mech 1751: Introduction to Mechatronics Actuators 1 2 3 4 5 6 7 8 9 09/3 16/3 23/3 30/3 6/4 20/4 27/4 4/5 11/5 Introduction Design Process System Modelling
Schedule of Events Week Date Content Assignment Notes Mech 1751: Introduction to Mechatronics Actuators 1 2 3 4 5 6 7 8 9 09/3 16/3 23/3 30/3 6/4 20/4 27/4 4/5 11/5 Introduction Design Process System Modelling
Experimental Evaluation of a New Braking System for Use in Passive Haptic Displays
 Experimental Evaluation of a New Braking System for Use in Passive Haptic Displays S.Munir, L. Tognetti and W.J.Book George W.Woodruff School of Mechanical Engineering Georgia Institute Of Technology Atlanta,
Experimental Evaluation of a New Braking System for Use in Passive Haptic Displays S.Munir, L. Tognetti and W.J.Book George W.Woodruff School of Mechanical Engineering Georgia Institute Of Technology Atlanta,
Design and Analysis of Hydrostatic Bearing Slide Used Linear Motor Direct-drive. Guoan Hou 1, a, Tao Sun 1,b
 Advanced Materials Research Vols. 211-212 (2011) pp 666-670 Online available since 2011/Feb/21 at www.scientific.net (2011) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amr.211-212.666
Advanced Materials Research Vols. 211-212 (2011) pp 666-670 Online available since 2011/Feb/21 at www.scientific.net (2011) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amr.211-212.666
Development of a low voltage Dielectric Electro-Active Polymer actuator
 Development of a low voltage Dielectric Electro-Active Polymer actuator C. Mangeot Noliac A/S, Kvistgaard, Denmark 1.1 Abstract: In the present paper, a low-voltage Dielectric Electro-active Polymer (DEAP)
Development of a low voltage Dielectric Electro-Active Polymer actuator C. Mangeot Noliac A/S, Kvistgaard, Denmark 1.1 Abstract: In the present paper, a low-voltage Dielectric Electro-active Polymer (DEAP)
Export Oriented Liaison Firm Logic Control, Inc Hon-Machi 6-chome, Toyonaka, Japan Normally Offline FAX
 Murata Kikai is an original equipment manufacturer of various sensors that are designed and made to meet the requirements of each client contractor who is a device, equipment or machine manufacturer, or
Murata Kikai is an original equipment manufacturer of various sensors that are designed and made to meet the requirements of each client contractor who is a device, equipment or machine manufacturer, or
THE DESIGN OF 1 N M TORQUE STANDARD MACHINE AT NIM
 Measurement of Mass, Force and Torque (APMF 2013) International Journal of Modern Physics: Conference Series Vol. 24 (2013) 1360024 (7 pages) The Authors DOI: 10.1142/S2010194513600240 THE DESIGN OF 1
Measurement of Mass, Force and Torque (APMF 2013) International Journal of Modern Physics: Conference Series Vol. 24 (2013) 1360024 (7 pages) The Authors DOI: 10.1142/S2010194513600240 THE DESIGN OF 1
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Principles of Electrical Engineering
 D.C GENERATORS Principle of operation of D.C machines, types of D.C Generators, e.m.f equation of D.C Generator, O.C.C of a D.C Shunt Generator, Load characteristics of D.C.Generators GENERATOR PRINCIPLE:
D.C GENERATORS Principle of operation of D.C machines, types of D.C Generators, e.m.f equation of D.C Generator, O.C.C of a D.C Shunt Generator, Load characteristics of D.C.Generators GENERATOR PRINCIPLE:
Finite Element Electromagnetic and Mechanical Analysis of Micropump
 Finite Element Electromagnetic and Mechanical Analysis of Micropump Gijoy S #, Abhilash S S #, Manu Krishnan * # Department of Mechanical Engineering, Sree Chitra Thirunal College of Engineering, Trivandrum,
Finite Element Electromagnetic and Mechanical Analysis of Micropump Gijoy S #, Abhilash S S #, Manu Krishnan * # Department of Mechanical Engineering, Sree Chitra Thirunal College of Engineering, Trivandrum,
NEW STRATEGY FOR DESIGN AND FABRICATING OF A GRAIN SORTING SYSTEM USING HIGH-SPEED PIEZOELECTRIC VALVES
 NEW STRATEGY FOR DESIGN AND FABRICATING OF A GRAIN SORTING SYSTEM USING HIGH-SPEED PIEZOELECTRIC VALVES So-Nam Yun*, Hwang-Hun Jeong**, Dong-Gun Kim**, Eun-A Jeong** and Hong-Hee Kim*** * Department of
NEW STRATEGY FOR DESIGN AND FABRICATING OF A GRAIN SORTING SYSTEM USING HIGH-SPEED PIEZOELECTRIC VALVES So-Nam Yun*, Hwang-Hun Jeong**, Dong-Gun Kim**, Eun-A Jeong** and Hong-Hee Kim*** * Department of
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
HSI Stepper Motor Theory
 HI tepper Motor Theory Motors convert electrical energy into mechanical energy. A stepper motor converts electrical pulses into specific rotational movements. The movement created by each pulse is precise
HI tepper Motor Theory Motors convert electrical energy into mechanical energy. A stepper motor converts electrical pulses into specific rotational movements. The movement created by each pulse is precise
Chapter 2 Dynamic Analysis of a Heavy Vehicle Using Lumped Parameter Model
 Chapter 2 Dynamic Analysis of a Heavy Vehicle Using Lumped Parameter Model The interaction between a vehicle and the road is a very complicated dynamic process, which involves many fields such as vehicle
Chapter 2 Dynamic Analysis of a Heavy Vehicle Using Lumped Parameter Model The interaction between a vehicle and the road is a very complicated dynamic process, which involves many fields such as vehicle
gskin Instruction Manual gskin Heat Flux Sensors for greenteg AG Technoparkstrasse 1 greenteg.com
 gskin Instruction Manual for gskin Heat Flux Sensors 2 / 16 gskin Heat Flux Sensors: Instruction Manual CONTENT 1. SHORT USER GUIDE... 4 2. gskin HEAT FLUX SENSOR INTRODUCTION... 5 3. FUNCTIONALITY TEST...
gskin Instruction Manual for gskin Heat Flux Sensors 2 / 16 gskin Heat Flux Sensors: Instruction Manual CONTENT 1. SHORT USER GUIDE... 4 2. gskin HEAT FLUX SENSOR INTRODUCTION... 5 3. FUNCTIONALITY TEST...
Attention is drawn to the following places, which may be of interest for search:
 CPC - F04B - 2017.08 F04B POSITIVE DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS (machines for liquids, or pumps, of rotary piston or oscillating piston type F04C; non-positive displacement pumps F04D; pumping
CPC - F04B - 2017.08 F04B POSITIVE DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS (machines for liquids, or pumps, of rotary piston or oscillating piston type F04C; non-positive displacement pumps F04D; pumping
ISSN: [Raghunandan* et al., 5(11): November, 2016] Impact Factor: 4.116
![ISSN: [Raghunandan* et al., 5(11): November, 2016] Impact Factor: 4.116](/thumbs/75/72421287.jpg "ISSN: [Raghunandan* et al., 5(11): November, 2016] Impact Factor: 4.116") IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY DESIGN AND ANALYSIS OF GO-KART CHASSIS D.Raghunandan*, A.Pandiyan, Shajin Majeed * Mechanical Department, Final year, Saveetha
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY DESIGN AND ANALYSIS OF GO-KART CHASSIS D.Raghunandan*, A.Pandiyan, Shajin Majeed * Mechanical Department, Final year, Saveetha
FEA Based Vibration Characteristic Analysis of Conventional and Composite Material Single Piece Drive Shaft
 , July 5-7, 2017, London, U.K. FEA Based Vibration Characteristic Analysis of Conventional and Composite Material Single Piece Drive Shaft Ashwani Kumar, Neelesh Sharma, Pravin P Patil Abstract The main
, July 5-7, 2017, London, U.K. FEA Based Vibration Characteristic Analysis of Conventional and Composite Material Single Piece Drive Shaft Ashwani Kumar, Neelesh Sharma, Pravin P Patil Abstract The main
DEVELOPMENT OF ELECTRONICALLY CONTROLLED PROPORTIONING DIRECTIONAL SERVO VALVES PROJECT REFERENCE NO.: 38S1453
 DEVELOPMENT OF ELECTRONICALLY CONTROLLED PROPORTIONING DIRECTIONAL SERVO VALVES COLLEGE BRANCH GUIDE PROJECT REFERENCE NO.: 38S1453 : BAPUJI INSTITUTE OF ENGINEERING AND TECHNOLOGY, DAVANGERE : MECHANICAL
DEVELOPMENT OF ELECTRONICALLY CONTROLLED PROPORTIONING DIRECTIONAL SERVO VALVES COLLEGE BRANCH GUIDE PROJECT REFERENCE NO.: 38S1453 : BAPUJI INSTITUTE OF ENGINEERING AND TECHNOLOGY, DAVANGERE : MECHANICAL
Our test laboratory - Apparatebau Kirchheim-Teck GmbH
 1 / 16 Test laboratory equipment 1 Microsection lab for crimp contacts Tensile, pressure and bending test machine: Static + dynamic Vibration test: Vibration + shock Climate tests: Temperature + humidity
1 / 16 Test laboratory equipment 1 Microsection lab for crimp contacts Tensile, pressure and bending test machine: Static + dynamic Vibration test: Vibration + shock Climate tests: Temperature + humidity
Chapter 2. Background
 Chapter 2 Background The purpose of this chapter is to provide the necessary background for this research. This chapter will first discuss the tradeoffs associated with typical passive single-degreeof-freedom
Chapter 2 Background The purpose of this chapter is to provide the necessary background for this research. This chapter will first discuss the tradeoffs associated with typical passive single-degreeof-freedom
Cooldown Measurements in a Standing Wave Thermoacoustic Refrigerator
 Cooldown Measurements in a Standing Wave Thermoacoustic Refrigerator R. C. Dhuley, M.D. Atrey Mechanical Engineering Department, Indian Institute of Technology Bombay, Powai Mumbai-400076 Thermoacoustic
Cooldown Measurements in a Standing Wave Thermoacoustic Refrigerator R. C. Dhuley, M.D. Atrey Mechanical Engineering Department, Indian Institute of Technology Bombay, Powai Mumbai-400076 Thermoacoustic
Research on the Structure of Linear Oscillation Motor and the Corresponding Applications on Piston Type Refrigeration Compressor
 International Conference on Informatization in Education, Management and Business (IEMB 2015) Research on the Structure of Linear Oscillation Motor and the Corresponding Applications on Piston Type Refrigeration
International Conference on Informatization in Education, Management and Business (IEMB 2015) Research on the Structure of Linear Oscillation Motor and the Corresponding Applications on Piston Type Refrigeration
RENOVATION OF NMIJ'S 5 MN HYDRAULIC AMPLIFICATION TYPE FORCE STANDARD MACHINE
 Measurement of Mass, Force and Torque (APMF 213) International Journal of Modern Physics: Conference Series Vol. 24 (213) 13611 (7 pages) The Authors DOI: 1.1142/S211945136112 RENOVATION OF NMIJ'S 5 MN
Measurement of Mass, Force and Torque (APMF 213) International Journal of Modern Physics: Conference Series Vol. 24 (213) 13611 (7 pages) The Authors DOI: 1.1142/S211945136112 RENOVATION OF NMIJ'S 5 MN
Extreme Environment For high pressure, low temperature, and high temperature applications
 SENSOR DATA SHEET Extreme Environment For high pressure, low temperature, and high temperature applications 800-552-6267 kamansensors.com measuring@kaman.com Features v For applications requiring high
SENSOR DATA SHEET Extreme Environment For high pressure, low temperature, and high temperature applications 800-552-6267 kamansensors.com measuring@kaman.com Features v For applications requiring high
Online vibration suppression in lathe machine
 Volume 77 Issue 2 August 2016 of Achievements in Materials and Manufacturing Engineering International Scientific Journal published monthly by the World Academy of Materials and Manufacturing Engineering
Volume 77 Issue 2 August 2016 of Achievements in Materials and Manufacturing Engineering International Scientific Journal published monthly by the World Academy of Materials and Manufacturing Engineering
PREDICTION OF PISTON SLAP OF IC ENGINE USING FEA BY VARYING GAS PRESSURE
 PREDICTION OF PISTON SLAP OF IC ENGINE USING FEA BY VARYING GAS PRESSURE V. S. Konnur Department of Mechanical Engineering, BLDEA s Engineering College, Bijapur, Karnataka, (India) ABSTRACT The automotive
PREDICTION OF PISTON SLAP OF IC ENGINE USING FEA BY VARYING GAS PRESSURE V. S. Konnur Department of Mechanical Engineering, BLDEA s Engineering College, Bijapur, Karnataka, (India) ABSTRACT The automotive
Akribis Systems. Where Precision Matters
 Akribis Systems TM Where Precision Matters Akribis Logo TM Akribis is a Latinized Greek word that means Precision. On the logo, the letter a is formed by a line and a circle, representing linear and rotary
Akribis Systems TM Where Precision Matters Akribis Logo TM Akribis is a Latinized Greek word that means Precision. On the logo, the letter a is formed by a line and a circle, representing linear and rotary
Mechanical Engineering
 Mechanical Engineering Stepper Motor Drive Full step controlling of stepper Motor Single step, low and high speed, Forward and Reverse Small stepper Motor with driver and Power Circuit Necessary Power
Mechanical Engineering Stepper Motor Drive Full step controlling of stepper Motor Single step, low and high speed, Forward and Reverse Small stepper Motor with driver and Power Circuit Necessary Power
Cleveland-Kidder Ultra
 LOW PROFILE Low Profile Load Cell Providing up to a 40:1 Tension Range Performance Benefits Cleveland Motion Controls new Ultra Line Slim Cell is part of the new Line Tension family. a unique low-profile
LOW PROFILE Low Profile Load Cell Providing up to a 40:1 Tension Range Performance Benefits Cleveland Motion Controls new Ultra Line Slim Cell is part of the new Line Tension family. a unique low-profile
Torsional Ratcheting Actuating System
 5 %An72@Nz - c- Torsional Ratcheting Actuating System Stephen M. Barnes, Samuel L. Miller, M. Steven Rodgers, Fernando Bitsie ~! ~~~~ ~~~ Sandia National Laboratories MS 1080, PO Box 5800, Albuquerque,
5 %An72@Nz - c- Torsional Ratcheting Actuating System Stephen M. Barnes, Samuel L. Miller, M. Steven Rodgers, Fernando Bitsie ~! ~~~~ ~~~ Sandia National Laboratories MS 1080, PO Box 5800, Albuquerque,
Passive Vibration Reduction with Silicone Springs and Dynamic Absorber
 Available online at www.sciencedirect.com Physics Procedia 19 (2011 ) 431 435 International Conference on Optics in Precision Engineering and Nanotechnology 2011 Passive Vibration Reduction with Silicone
Available online at www.sciencedirect.com Physics Procedia 19 (2011 ) 431 435 International Conference on Optics in Precision Engineering and Nanotechnology 2011 Passive Vibration Reduction with Silicone
Characteristic of a Miniature Linear Compressor
 Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 2010 Characteristic of a Miniature Linear Compressor Wen Wang Shanghai Jiao Tong University
Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 2010 Characteristic of a Miniature Linear Compressor Wen Wang Shanghai Jiao Tong University
Innovative Approach To Harvest Kinetic Energy From Roadway Pavement
 Innovative Approach To Harvest Kinetic Energy From Roadway Pavement Mohammadreza Gholikhani Department of Civil and Environmental Engineering Jan 15, 2019 2/6/2019 1 Acknowledgment I would like to extend
Innovative Approach To Harvest Kinetic Energy From Roadway Pavement Mohammadreza Gholikhani Department of Civil and Environmental Engineering Jan 15, 2019 2/6/2019 1 Acknowledgment I would like to extend
EFFECTIVE SOLUTIONS FOR SHOCK AND VIBRATION CONTROL
 EFFECTIVE SOLUTIONS FOR SHOCK AND VIBRATION CONTROL Part 1 Alan Klembczyk TAYLOR DEVICES, INC. North Tonawanda, NY Part 2 Herb LeKuch Shocktech / 901D Monsey, NY SAVIAC Tutorial 2009 Part 1 OUTLINE Introduction
EFFECTIVE SOLUTIONS FOR SHOCK AND VIBRATION CONTROL Part 1 Alan Klembczyk TAYLOR DEVICES, INC. North Tonawanda, NY Part 2 Herb LeKuch Shocktech / 901D Monsey, NY SAVIAC Tutorial 2009 Part 1 OUTLINE Introduction
SMART FLUID SELF ADAPTIVE DAMPER SYSTEM (SFSADS)
") SMART FLUID SELF ADAPTIVE DAMPER SYSTEM (SFSADS) Santhosh Sivan. K 1, Chandrasekar Sundaram 2 and Hari Krishnan. R 3 ABSTRACT 1,2 Department of Automobile Engineering, Anna University, MIT, Chennai, India
SMART FLUID SELF ADAPTIVE DAMPER SYSTEM (SFSADS) Santhosh Sivan. K 1, Chandrasekar Sundaram 2 and Hari Krishnan. R 3 ABSTRACT 1,2 Department of Automobile Engineering, Anna University, MIT, Chennai, India
Permanent Magnet DC Motor
 Renewable Energy Permanent Magnet DC Motor Courseware Sample 86357-F0 A RENEWABLE ENERGY PERMANENT MAGNET DC MOTOR Courseware Sample by the staff of Lab-Volt Ltd. Copyright 2011 Lab-Volt Ltd. All rights
Renewable Energy Permanent Magnet DC Motor Courseware Sample 86357-F0 A RENEWABLE ENERGY PERMANENT MAGNET DC MOTOR Courseware Sample by the staff of Lab-Volt Ltd. Copyright 2011 Lab-Volt Ltd. All rights
Cobra, 2-Degree of Freedom Fiber Optic Positioner for the Subaru Prime Focus Spectrograph
 Cobra, 2-Degree of Freedom Fiber Optic Positioner for the Subaru Prime Focus Spectrograph David Henderson co-ceo and CTO New Scale Technologies, Inc. 121 Victor Heights Parkway Victor NY 14564 www.newscaletech.com
Cobra, 2-Degree of Freedom Fiber Optic Positioner for the Subaru Prime Focus Spectrograph David Henderson co-ceo and CTO New Scale Technologies, Inc. 121 Victor Heights Parkway Victor NY 14564 www.newscaletech.com
Modular Analysis of Main Rotor Blade of Light Helicopter using FEM
 Modular Analysis of Main Rotor Blade of Light Helicopter using FEM Mahesh N V 1, Raghu T 2 Schlor, IVth Semester M. Tech(Design Engineering), 2 Assistant Professor 1, 2 Mechanical Engineering Department
Modular Analysis of Main Rotor Blade of Light Helicopter using FEM Mahesh N V 1, Raghu T 2 Schlor, IVth Semester M. Tech(Design Engineering), 2 Assistant Professor 1, 2 Mechanical Engineering Department
SOME FACTORS THAT INFLUENCE THE PERFORMANCE OF
 SOME FACTORS THAT INFLUENCE THE PERFORMANCE OF Authored By: Robert Pulford Jr. and Engineering Team Members Haydon Kerk Motion Solutions There are various parameters to consider when selecting a Rotary
SOME FACTORS THAT INFLUENCE THE PERFORMANCE OF Authored By: Robert Pulford Jr. and Engineering Team Members Haydon Kerk Motion Solutions There are various parameters to consider when selecting a Rotary
A STUDY OF HYDRAULIC RESISTANCE OF VISCOUS BYPASS GAP IN MAGNETORHEOLOGICAL DAMPER
 ACTA UNIVERSITATIS AGRICULTURAE ET SILVICULTURAE MENDELIANAE BRUNENSIS Volume 64 134 Number 4, 2016 http://dx.doi.org/10.11118/actaun201664041199 A STUDY OF HYDRAULIC RESISTANCE OF VISCOUS BYPASS GAP IN
ACTA UNIVERSITATIS AGRICULTURAE ET SILVICULTURAE MENDELIANAE BRUNENSIS Volume 64 134 Number 4, 2016 http://dx.doi.org/10.11118/actaun201664041199 A STUDY OF HYDRAULIC RESISTANCE OF VISCOUS BYPASS GAP IN
Finite Element and Experimental Validation of Stiffness Analysis of Precision Feedback Spring and Flexure Tube of Jet Pipe Electrohydraulic Servovalve
 Finite Element and Experimental Validation of Stiffness Analysis of Precision Feedback Spring and Flexure Tube of Jet Pipe Electrohydraulic Servovalve M. Singaperumal*, Somashekhar. S. Hiremath* R. Krishna
Finite Element and Experimental Validation of Stiffness Analysis of Precision Feedback Spring and Flexure Tube of Jet Pipe Electrohydraulic Servovalve M. Singaperumal*, Somashekhar. S. Hiremath* R. Krishna
Piezoelectric Direct Drive Servovalve
 Piezoelectric Direct Drive Servovalve Jason E. Lindler, Eric H. Anderson CSA Engineering 2565 Leghorn Street, Mountain View, California Industrial and Commercial Applications of Smart Structures Technologies
Piezoelectric Direct Drive Servovalve Jason E. Lindler, Eric H. Anderson CSA Engineering 2565 Leghorn Street, Mountain View, California Industrial and Commercial Applications of Smart Structures Technologies
FRL unit consist of Filterations, Regulators and Lubricator unit.
 4.1 AIR CONTROL 4.1.1 Fluid Conditioner FRL unit consist of Filterations, Regulators and Lubricator unit. It is also known as Air Service Unit. Primary function is to provide clean air at optimal pressure
4.1 AIR CONTROL 4.1.1 Fluid Conditioner FRL unit consist of Filterations, Regulators and Lubricator unit. It is also known as Air Service Unit. Primary function is to provide clean air at optimal pressure
R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS
 Automation Solutions R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS COMPACT MULTI-AXIS INDUSTRIAL ROBOTS FOR COMPLEX PROCESSING TASKS Reduce Manufacturing Costs Improve Production Time Increase Throughput Engineering
Automation Solutions R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS COMPACT MULTI-AXIS INDUSTRIAL ROBOTS FOR COMPLEX PROCESSING TASKS Reduce Manufacturing Costs Improve Production Time Increase Throughput Engineering
Introduction to Actuators
 Introduction to Actuators Dr. Bishakh Bhattacharya h Professor, Department of Mechanical Engineering IIT Kanpur Joint Initiative of IITs and IISc - Funded by MHRD This Lecture Contains Why Energy Conversion
Introduction to Actuators Dr. Bishakh Bhattacharya h Professor, Department of Mechanical Engineering IIT Kanpur Joint Initiative of IITs and IISc - Funded by MHRD This Lecture Contains Why Energy Conversion
ANALYSIS OF PROPERTIES OF ACTUATORS USED IN VIBRATION CONTROL SYSTEMS
 International Carpathian Control Conference ICCC 2002 MALENOVICE, CZECH REPUBLIC May 27-30, 2002 ANALYSIS OF PROPERTIES OF ACTUATORS USED IN VIBRATION CONTROL SYSTEMS Janusz KOWAL 1 and Roman ORNACKI 2
International Carpathian Control Conference ICCC 2002 MALENOVICE, CZECH REPUBLIC May 27-30, 2002 ANALYSIS OF PROPERTIES OF ACTUATORS USED IN VIBRATION CONTROL SYSTEMS Janusz KOWAL 1 and Roman ORNACKI 2
SHOCK ABSORBER/DAMPER TESTING MACHINE
 SHOCK ABSORBER/DAMPER TESTING MACHINE Dampening force of a shock absorber is directly proportional to velocity and this parameter needs to be precisely controlled. A small variation of 1mm in a stroke
SHOCK ABSORBER/DAMPER TESTING MACHINE Dampening force of a shock absorber is directly proportional to velocity and this parameter needs to be precisely controlled. A small variation of 1mm in a stroke
Vibration Control of a PZT Actuated Suspension Dual-Stage Servo System Using a PZT Sensor
 932 IEEE TRANSACTIONS ON MAGNETICS, VOL. 39, NO. 2, MARCH 2003 Vibration Control of a PZT Actuated Suspension Dual-Stage Servo System Using a PZT Sensor Yunfeng Li, Roberto Horowitz, and Robert Evans Abstract
932 IEEE TRANSACTIONS ON MAGNETICS, VOL. 39, NO. 2, MARCH 2003 Vibration Control of a PZT Actuated Suspension Dual-Stage Servo System Using a PZT Sensor Yunfeng Li, Roberto Horowitz, and Robert Evans Abstract
HIGH CAPACITY TWO-STAGE PULSE TUBE
 HIGH CAPACITY TWO-STAGE PULSE TUBE C. Jaco, T. Nguyen, D. Harvey, and E. Tward Northrop Grumman Space Technology Redondo Beach, CA, USA ABSTRACT The High Capacity Cryocooler (HCC) provides large capacity
HIGH CAPACITY TWO-STAGE PULSE TUBE C. Jaco, T. Nguyen, D. Harvey, and E. Tward Northrop Grumman Space Technology Redondo Beach, CA, USA ABSTRACT The High Capacity Cryocooler (HCC) provides large capacity
Extreme Environment. Extreme Environment. For high pressure, low temperature, and high temperature applications. Version
 Extreme Environment For high pressure, low temperature, and high temperature applications Page 1/8 Gap Measuring System Features For applications requiring high accuracy, high reliability, and structural
Extreme Environment For high pressure, low temperature, and high temperature applications Page 1/8 Gap Measuring System Features For applications requiring high accuracy, high reliability, and structural
Question 2: Around the bar magnet draw its magnetic fields. Answer:
 Chapter 13: Magnetic Effects of Electric Current Question 1: What is the reason behind the compass needle is deflected when it is brought close to the bar magnet? Compass needles work as a small bar magnet;
Chapter 13: Magnetic Effects of Electric Current Question 1: What is the reason behind the compass needle is deflected when it is brought close to the bar magnet? Compass needles work as a small bar magnet;
Application of Airborne Electro-Optical Platform with Shock Absorbers. Hui YAN, Dong-sheng YANG, Tao YUAN, Xiang BI, and Hong-yuan JIANG*
 2016 International Conference on Applied Mechanics, Mechanical and Materials Engineering (AMMME 2016) ISBN: 978-1-60595-409-7 Application of Airborne Electro-Optical Platform with Shock Absorbers Hui YAN,
2016 International Conference on Applied Mechanics, Mechanical and Materials Engineering (AMMME 2016) ISBN: 978-1-60595-409-7 Application of Airborne Electro-Optical Platform with Shock Absorbers Hui YAN,
VALMONT MITIGATOR TR1
 VALMONT MITIGATOR TR1 Research Verification of the Valmont TR1 Damper Performance MITIGATOR TR1 VIBRATION DAMPER The Valmont TR1 damper has been specifically designed using vibration theory and innovative
VALMONT MITIGATOR TR1 Research Verification of the Valmont TR1 Damper Performance MITIGATOR TR1 VIBRATION DAMPER The Valmont TR1 damper has been specifically designed using vibration theory and innovative
Continuing Research and Development of Linac and Final Doublet Girder Movers
 Continuing Research and Development of Linac and Final Doublet Girder Movers Classification: Accelerator Science Institution and Personnel requesting funding: Colorado State University David W. Warner,
Continuing Research and Development of Linac and Final Doublet Girder Movers Classification: Accelerator Science Institution and Personnel requesting funding: Colorado State University David W. Warner,
Test rig for rod seals contact pressure measurement
 Tribology and Design 107 Test rig for rod seals contact pressure measurement G. Belforte 1, M. Conte 2, L. Mazza 1, T. Raparelli 1 & C. Visconte 1 1 Department of Mechanics, Politecnico di Torino, Italy
Tribology and Design 107 Test rig for rod seals contact pressure measurement G. Belforte 1, M. Conte 2, L. Mazza 1, T. Raparelli 1 & C. Visconte 1 1 Department of Mechanics, Politecnico di Torino, Italy