Efficient use of professional sensors in car and tire performance measurement and comparison
|
|
|
- Gladys Stevens
- 5 years ago
- Views:
Transcription




1 Efficient use of professional sensors in car and tire performance measurement and comparison Vehicle Dynamics Expo Presentation By Stefan Kloppenborg June 16 nd -18 th 2009



2 Topics What is OptimumG Yaw moment Using sensors to characterize Tire and their effect on handling Examples of component evaluation 2 2


3 OptimumG 3 3



4 OptimumG In-House seminars One-on-one training Public seminars 4 4



5 Public & In-House OptimumG Seminars 3 and 4 Day 12 Day Workshop Design Around Customer Needs 8900 Power Point Slides to choose from 5 5
6 OptimumG Seminars Customers 312 Seminars / 12 Years Over 6000 Satisfied Customers Alcon AP Brakes Brembo Bridgestone-Firestone USA Bridgestone Tech. Center Europe BMW Citroen Sport Corrsys-Datron Chrysler Dunlop Ferrari Ford Advanced Vehicle Operations Goodyear Mac Laren Magneti-Marelli, Michelin Mitsubishi Multimatic MoTeC Nascar Ohlins Oreca Penske Pi Research Pirelli Porsche PSA Peugeot Citroen Toyota ZF-Sachs. 6


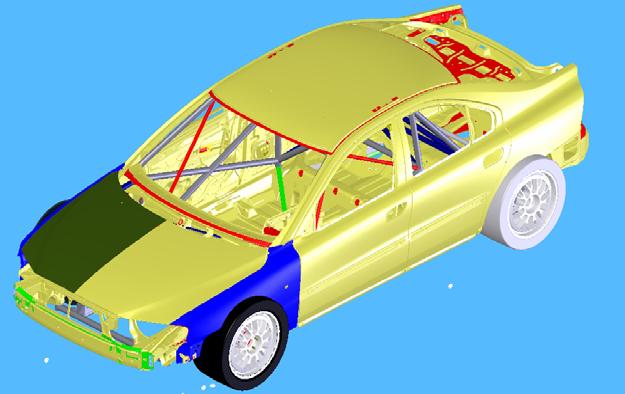

7 Chassis design OptimumG Consulting 7 7
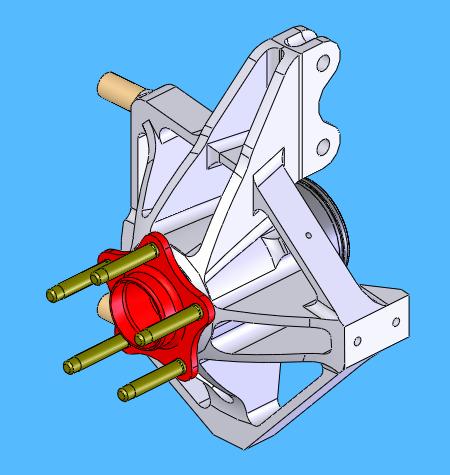
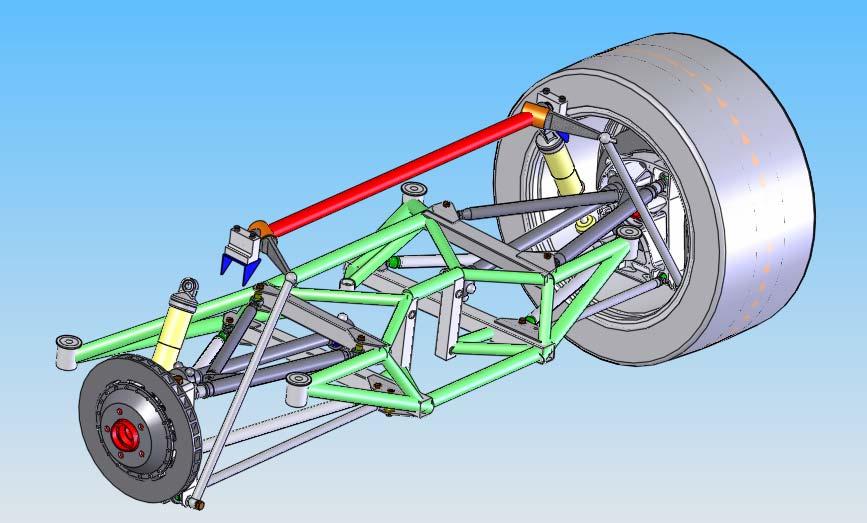

8 Suspensions Design OptimumG Consulting 8 8



9 Testing and Development OptimumG Consulting 9 9




10 OptimumG Consulting Aerodynamics studies Model design Wind tunnel Testing 10 10

11 OptimumK Kinematics Software OptimumG Software 11 11

12 Steady State Computational Vehicle Dynamics OptimumG Software 12 12


13 OptimumG Software OptimumT Tire test data visualization and modeling 13 13
14 OptimumG 14 14



15 Understanding Vehicle Behavior Understanding 15 15





16 Whether it is about Safety Or about performance 16 16
17 Yaw moment Tire forces and moments Agility / Stability / Crash Avoidance Performances Cornering Braking Combined accelerations T F Indispensable in car and tire design Car and tire simulation Car and tire development ESP / ABS / Traction control 17 17
18 Cornering Steady State Vehicle Dynamics Basics FyFL + FyFR + FyRL + FyRR = Mass * latg b a M = 0 ( F + F ) a ( F + F ) b = yfl yfr yrl yrr
19 Braking Steady State Vehicle Dynamics Basics F + F + F + F = Mass * xfl xfr xrl xrr longg T F T F T R M = 0 ( T T T T F R F R F + F ) ( F + F ) = xfr xrr xfl xrl 19 19
20 Steady State Vehicle Dynamics Basics Braking and Cornering Fy Fx : : FyFL + FyFR + FyRL + FyRR = Mass * F + F + F + F = Mass * xfl xfr xrl xrr b a T F latg longg T F M = 0 T R TF TR TF TR [ ( F + F ) ( F + F ) ] + [ ( F + F ) a ( F + F ) b] = 0 xfr xrr xfl xrl yfl yfr yrl yrr
21 Steady State Vehicle Dynamics Basics Tire self aligning torque FyFL + FyFR + FyRL + FyRR = Mass * Fy Fx F + F + F + F = Mass * xfl xfr xrl xrr latg longg b a T F T F T R M = 0 [( T T T T F R F R F + F ) ( F + F )] + [( F + F ) a ( F + F ) b] M M M M = xfr xrr xfl xrl yfl yfr yrl yrr zrf zlf zrr zlr
22 Transient Vehicle Dynamics Basics b a T F T F T R d 2 θ/dt 2 = Yaw acceleration I zz = Moment of Inertia = d(yaw rate)/dt = d(gyro)/dt [( F XLF TF + F 2 xlr TR ) ( F 2 xrf TF + F 2 xrr TR )] + 2 [( F yfl d + F yfr ) a ( F yrl =I 2 θ/dt 2 zz + F yrr b] M 22 ) zrf M zlf M zrr M zlr 22
![Measuring Yaw Moment b a T F T F T R [( F XLF T F 2 + F xlr TR ) ( F 2 xrf TF + F 2 xrr TR )] + 2 [( F yfl + F yfr ) a ( F yrl =I](/docs-images/85/92742590/images/23-0.jpg "d 2 θ/dt 2 zz Allows us to determine and quantify each of the 12 causes of the yaw moment + F yrr b] M 23 ) zrf M zlf M zrr M zlr")
23 Measuring Yaw Moment b a T F T F T R [( F XLF T F 2 + F xlr TR ) ( F 2 xrf TF + F 2 xrr TR )] + 2 [( F yfl + F yfr ) a ( F yrl =I d 2 θ/dt 2 zz Allows us to determine and quantify each of the 12 causes of the yaw moment + F yrr b] M 23 ) zrf M zlf M zrr M zlr 23

24 Yaw Moment Two Methods of Calculating Yaw Moment There is some difference between the yaw moment calculated with the wheel forces and the yaw moment calculated with the gyro. From Yaw Acceleration From Tire Forces On cars with a lot of suspension compliance, there is a lag between the tire forces and the yaw acceleration. M= I zz d 2 θ/dt

25 Yaw Moment: The 3 Types of Causes The yaw moment from lateral forces and longitudinal forces are usually the greater than the yaw moment from Mz 25 25
 Yaw Moment from Mz (tire self aligning torque) 26")
26 Yaw Moment: The 12 Causes Total Yaw Moment Yaw Moment from Fx (longitudinal) Yaw Moment from Fy (lateral) Yaw Moment from Mz (tire self aligning torque) 26 26


27 Validating OptimumG has been developing vehicle dynamics software and needed a way to validate it Oreste Berta Motorsports provided a car, test-track and mechanics to allow OptimumG test 27 27
")

28 What Determines Tire Forces and Moments? Mz Tire construction Tire compound Rim Road surface Mx Slip angle (including toe) Slip ratio Camber Vertical load Pressure Speed Wear Temperature Ground Air, nitrogen Compound core Tread Surface All the derivatives of the above parameters Fx Fy Fz My And what can we do to change them? 28 28

29 Tire forces and moments Slip Angle Lateral tire force vs. Slip angle 29 29



30 Slip Angle - Wheels Measuring Slip Angle Corrsys-Datron S350 Instant Turn Center 30 30

31 Tire forces and moments Vertical Load Tire lateral force Vs. slip angle and vertical load 31 31
32 Measuring Vertical Load Kistler Wheel Force Transducer 32 32

33 Tire forces and moments Camber Tire lateral force Vs slip angle, vertical load, camber 33 33
 Tire lateral force Vs slip angle, vertical load, camber")
34 Lateral Force (N) Tire forces and moments Camber Slip Angle (deg) Normal Load (N) Tire lateral force Vs slip angle, vertical load, camber 34 34

35 Measuring Camber Corrsys-Datron DCA Sensor 35 35
36 Tire forces and moments Slip Ratio Tire longitudinal force vs. slip ratio and vertical load 36 36



37 Measuring Slip Ratio ReΩ V Sr = V 37 37

38 Tire forces and moments Combined tire forces 38 38
39 The Max Longitudinal Force do not always correspond to 0 Lateral Force! Longitudinal Force What is a Friction Ellipse? Max Longitudinal Force Max Total Force Current Total Force Current Longitudinal Force Max Lateral Force Max + Lateral Force Current Lateral Force Lateral Force Max Longitudinal Force The Max Lateral Force do not always correspond to 0 Longitudinal Force! Lateral Efficiency (%) = Max Lateral Force Current Lateral Force Total Efficiency (%)= x 100 Longitudinal Efficiency (%) = Total Force Current Total Force x 100 Max Longitudinal Force Current Longitudinal Force x
40 Friction Ellipse Per Tire (Baseline) LatG=1, LongG=0, Speed=93 MPH, Yaw Moment=0 FL Vert Load=399.5 lbf Camber= 3.46 Slip Angle= 2.47 Slip Ratio=0 800 lbf 850 lbf 800 lbf FR Vert Load= lbf Camber= 2.03 Slip Angle= 1.26 Slip Ratio= lbf 2250 lbf 2025 lbf Lat Force= lbf Long Force= 8.9 lbf Efficiency=68.9% 850 lbf Lat Force= lbf Long Force=16.5 lbf Efficiency=46.5% 2025 lbf RL Vert Load=509.8 lbf Camber= 2.17 Slip Angle= 1.66 Slip Ratio= lbf 1125 lbf 1075 lbf RR Vert Load= lbf Camber= 0.40 Slip Angle= 5.05 Slip Ratio= lbf 2500 lbf 2025 lbf Lat Force= lbf Long Force=130.4 lbf Efficiency=51.1% 1125 lbf Lat Force= lbf Long Force=195.6 lbf Efficiency=97.4% 2250 lbf 40 40
41 Friction Ellipse Per Tire (Comparison) LatG=1, LongG=0, Speed=93 MPH, Yaw Moment=0, Front suspension 1 deg toe in FL Vert Load=379.4 lbf Camber= 3.96 Slip Angle= 1.00 Slip Ratio=0 675 lbf 790 lbf 675 lbf FR Vert Load= lbf Camber= 1.55 Slip Angle= 1.97 Slip Ratio= N 2700 lbf 2250 lbf Lat Force= lbf Long Force= 8.7 lbf Efficiency=37.1% 790 lbf Lat Force= lbf Long Force= 17.1 lbf Efficiency=66.8% 2250 N RL Vert Load=503.1 lbf Camber= 2.32 Slip Angle= 1.16 Slip Ratio= lbf 1125 lbf 1125 lbf RR Vert Load= lbf Camber= 0.27 Slip Angle= 5.47 Slip Ratio= lbf 2360 lbf 2340 lbf Lat Force= lbf Long Force=946.4 lbf Efficiency=43.77% 1125 lbf Lat Force= lbf Long Force=319.1 lbf Efficiency=99.3% 2290 lbf 41 Vehicle Dynamics 41 Expo May 2009 Stuttgart, Germany
42 Measuring the Tire Force Vectors Each tire s force vector can be plotted in a scatter (XY) plot The vertical load can be displayed with a bar graph Data points are colored by vertical load (red being more load, blue being less) 42 42
43 Measuring the Tire Force Vectors Each tire s force vector can be plotted in a scatter (XY) plot The vertical load can be displayed with a bar graph Higher force in direction of inside of each tire due to lateral load transfer Maximum drive force (longitudinal) when no lateral force is exerted 43 43
 - N Slip angle (deg) 44")
44 Tire Force Curves From WFT Data Tire force curves can be developed from wheel force transducer and slip angle sensor data Normalized Lateral Load OptimumT was used to fit a Pacejka 2002 Model Normal Load (Fz) - N Slip angle (deg) 44 44



45 Tire Force Curves From WFT Data Logged WFT and slip angle data Fitted tire model in OptimumT 45 45
46 Example of data analysis Brake torque and brake pressure follow each other. If the calipers were sticking, the torque would lag the pressure. Brake Pressure and Torque 46 46
47 The actual force brake bias can easily be determined by looking at the Fx load of the wheels. 66% Front Example of data analysis Results in brake bias shift Front to Brake front Distribution On cars equipped with ABS, shifts in brake balance can be detected. Master cylinder Front circuit Rear circuit Brake Pressure (bar) Front Circuit (bar) Rear Circuit (bar) Rear wheel locks, decrease in rear brake pressure 47


48 Example of data analysis Diff Characteristics Salisbury Diff Clutch plates Ramp angles Belleville washer Slope of envelope indicates ramp angle and number of clutch plates Size of neck indicates preload 48 48

49 Questions? Contacts OptimumG LLC E. Hampden Ave. Suite 210 Denver, CO
A new approach to steady state state and quasi steady steady state vehicle handling analysis
 Vehicle Dynamics Expo June 16 nd -18 th 2009 A new approach to steady state state and quasi steady steady state vehicle handling analysis Presentation By Claude Rouelle OptimumG Overview Vehicle Dynamics
Vehicle Dynamics Expo June 16 nd -18 th 2009 A new approach to steady state state and quasi steady steady state vehicle handling analysis Presentation By Claude Rouelle OptimumG Overview Vehicle Dynamics
d y FXf FXfl FXr FYf β γ V β γ FYfl V FYr FXrr FXrl FYrl FYrr
 Submission to AVEC 2002 TTLE AUTHORS Decoupling Control of fi and fl for high peformance AFS and DYC of 4 Wheel Motored Electric Vehicle Hiroaki agase, Tomoko noue and Yoichi Hori ADDRESS Department of
Submission to AVEC 2002 TTLE AUTHORS Decoupling Control of fi and fl for high peformance AFS and DYC of 4 Wheel Motored Electric Vehicle Hiroaki agase, Tomoko noue and Yoichi Hori ADDRESS Department of
Tech Tip: Trackside Tire Data
 Using Tire Data On Track Tires are complex and vitally important parts of a race car. The way that they behave depends on a number of parameters, and also on the interaction between these parameters. To
Using Tire Data On Track Tires are complex and vitally important parts of a race car. The way that they behave depends on a number of parameters, and also on the interaction between these parameters. To
Simplified Vehicle Models
 Chapter 1 Modeling of the vehicle dynamics has been extensively studied in the last twenty years. We extract from the existing rich literature [25], [44] the vehicle dynamic models needed in this thesis
Chapter 1 Modeling of the vehicle dynamics has been extensively studied in the last twenty years. We extract from the existing rich literature [25], [44] the vehicle dynamic models needed in this thesis
Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity
 Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity Benoit PARMENTIER, Frederic MONNERIE (PSA) Marc ALIRAND, Julien LAGNIER (LMS) Vehicle Dynamics
Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity Benoit PARMENTIER, Frederic MONNERIE (PSA) Marc ALIRAND, Julien LAGNIER (LMS) Vehicle Dynamics
Identification of tyre lateral force characteristic from handling data and functional suspension model
 Identification of tyre lateral force characteristic from handling data and functional suspension model Marco Pesce, Isabella Camuffo Centro Ricerche Fiat Vehicle Dynamics & Fuel Economy Christian Girardin
Identification of tyre lateral force characteristic from handling data and functional suspension model Marco Pesce, Isabella Camuffo Centro Ricerche Fiat Vehicle Dynamics & Fuel Economy Christian Girardin
The goal of the study is to investigate the effect of spring stiffness on ride height and aerodynamic balance.
 OptimumDynamics - Case Study Investigating Aerodynamic Distribution Goals Investigate the effect of springs on aerodynamic distribution Select bump stop gap Software OptimumDynamics The case study is broken
OptimumDynamics - Case Study Investigating Aerodynamic Distribution Goals Investigate the effect of springs on aerodynamic distribution Select bump stop gap Software OptimumDynamics The case study is broken
Modeling tire vibrations in ABS-braking
 Modeling tire vibrations in ABS-braking Ari Tuononen Aalto University Lassi Hartikainen, Frank Petry, Stephan Westermann Goodyear S.A. Tag des Fahrwerks 8. Oktober 2012 Contents 1. Introduction 2. Review
Modeling tire vibrations in ABS-braking Ari Tuononen Aalto University Lassi Hartikainen, Frank Petry, Stephan Westermann Goodyear S.A. Tag des Fahrwerks 8. Oktober 2012 Contents 1. Introduction 2. Review
TECHNICAL NOTE. NADS Vehicle Dynamics Typical Modeling Data. Document ID: N Author(s): Chris Schwarz Date: August 2006
: Chris Schwarz Date: August 2006") TECHNICAL NOTE NADS Vehicle Dynamics Typical Modeling Data Document ID: N06-017 Author(s): Chris Schwarz Date: August 2006 National Advanced Driving Simulator 2401 Oakdale Blvd. Iowa City, IA 52242-5003
TECHNICAL NOTE NADS Vehicle Dynamics Typical Modeling Data Document ID: N06-017 Author(s): Chris Schwarz Date: August 2006 National Advanced Driving Simulator 2401 Oakdale Blvd. Iowa City, IA 52242-5003
The Study For Anti-Rollover Performance Based On Fishhook and J Turn Simulation Fei Xiong 1,a, Fengchong Lan 1,b, Jiqing Chen 1,c*,Yunjiao Zhou 1,d
 3rd International Conference on Material, Mechanical and Manufacturing Engineering (IC3ME 2015) The Study For Anti-Rollover Performance Based On Fishhook and J Turn Simulation Fei Xiong 1,a, Fengchong
3rd International Conference on Material, Mechanical and Manufacturing Engineering (IC3ME 2015) The Study For Anti-Rollover Performance Based On Fishhook and J Turn Simulation Fei Xiong 1,a, Fengchong
Goals. Software. Benefits. We can create and evaluate multiple vehicle setups for a track. OptimumDynamics - Case Study Track Study
 OptimumDynamics - Case Study Track Study Goals Minimize engaging bump stops in specific zones. Minimize LLTD variation Software OptimumDynamics Microsoft Excel Benefits Track Map Visualization Full vehicle
OptimumDynamics - Case Study Track Study Goals Minimize engaging bump stops in specific zones. Minimize LLTD variation Software OptimumDynamics Microsoft Excel Benefits Track Map Visualization Full vehicle
A dream? Dr. Jürgen Bredenbeck Tire Technology Expo, February 2012 Cologne
 Rolling resistance measurement on the road: A dream? Dr. Jürgen Bredenbeck Tire Technology Expo, 14.-16. February 2012 Cologne Content Motivation Introduction of the used Measurement Equipment Introduction
Rolling resistance measurement on the road: A dream? Dr. Jürgen Bredenbeck Tire Technology Expo, 14.-16. February 2012 Cologne Content Motivation Introduction of the used Measurement Equipment Introduction
Cars, The high measuring accuracy of the precision load cells is retained during transmission, since digitization takes place on the wheel to
 Force SUNSTAR 传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 E-MAIL: RoaDyn S630 sp Wheel Force Transducer (WFT) for Passenger Cars Wheel force transducer for measuring three forces and three moments
Force SUNSTAR 传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 E-MAIL: RoaDyn S630 sp Wheel Force Transducer (WFT) for Passenger Cars Wheel force transducer for measuring three forces and three moments
Study Of On-Center Handling Behaviour Of A Vehicle
 Study Of On-Center Handling Behaviour Of A Vehicle Rohit Vaidya, P Seshu 1 and G Arora Tata Technologies Limited Pune Email: rohitvaidya@tatatechnologies.com 1 Mechanical Engineering Department. IIT Bombay.
Study Of On-Center Handling Behaviour Of A Vehicle Rohit Vaidya, P Seshu 1 and G Arora Tata Technologies Limited Pune Email: rohitvaidya@tatatechnologies.com 1 Mechanical Engineering Department. IIT Bombay.
Development of an Advanced Torque Vectoring Control System for an Electric Vehicle with In-wheel Motors using Soft Computing Techniques
 2013-01-0698 Development of an Advanced Torque Vectoring Control System for an Electric Vehicle with In-wheel Motors using Soft Computing Techniques Copyright 2013 SAE International Kiumars Jalali, Thomas
2013-01-0698 Development of an Advanced Torque Vectoring Control System for an Electric Vehicle with In-wheel Motors using Soft Computing Techniques Copyright 2013 SAE International Kiumars Jalali, Thomas
Experimental analysis of a contact patch form of a rolling tire: influence of speed, wheel load, camber and slip angle
 Experimental analysis of a contact patch form of a rolling tire: influence of speed, wheel load, camber and slip angle Dipl.-Ing. Pavel Sarkisov Prof. Dr.-Ing. Günther Prokop Dipl.-Ing. Steffen Drossel
Experimental analysis of a contact patch form of a rolling tire: influence of speed, wheel load, camber and slip angle Dipl.-Ing. Pavel Sarkisov Prof. Dr.-Ing. Günther Prokop Dipl.-Ing. Steffen Drossel
Alfonso PORCEL, Olivier MACCHI - PSA Peugeot Citroen, France
 First Type Approval of Electronic Stability Control in Passenger Cars by Means of Vehicle Dynamics Simulation in Accordance with ECE 13-H Challenges, Innovation and Benefits. Alfonso PORCEL, Olivier MACCHI
First Type Approval of Electronic Stability Control in Passenger Cars by Means of Vehicle Dynamics Simulation in Accordance with ECE 13-H Challenges, Innovation and Benefits. Alfonso PORCEL, Olivier MACCHI
Advanced Safety Range Extension Control System for Electric Vehicle with Front- and Rear-active Steering and Left- and Right-force Distribution
 Advanced Safety Range Extension Control System for Electric Vehicle with Front- and Rear-active Steering and Left- and Right-force Distribution Hiroshi Fujimoto and Hayato Sumiya Abstract Mileage per charge
Advanced Safety Range Extension Control System for Electric Vehicle with Front- and Rear-active Steering and Left- and Right-force Distribution Hiroshi Fujimoto and Hayato Sumiya Abstract Mileage per charge
Chassis development at Porsche
 Chassis development at Porsche Determining factors Challenges automotive industry Challenges chassis development e-mobility product differentiation customization driving resistance vehicle mass resource
Chassis development at Porsche Determining factors Challenges automotive industry Challenges chassis development e-mobility product differentiation customization driving resistance vehicle mass resource
Cornering & Traction Test Rig MTS Flat-Trac IV CT plus
 Testing Facilities Cornering & Traction Test Rig MTS Flat-Trac IV CT plus s steady-state force and moment measurement dynamic force and moment measurement slip angel sweeps tests tractive tests sinusoidal
Testing Facilities Cornering & Traction Test Rig MTS Flat-Trac IV CT plus s steady-state force and moment measurement dynamic force and moment measurement slip angel sweeps tests tractive tests sinusoidal
Simulation Study of Oscillatory Vehicle Roll Behavior During Fishhook Maneuvers
 28 American Control Conference Westin Seattle Hotel, Seattle, Washington, USA June 11-13, 28 FrA9.3 Simulation Study of Oscillatory Vehicle Roll Behavior During Fishhook Maneuvers Nikolai Moshchuk, Cedric
28 American Control Conference Westin Seattle Hotel, Seattle, Washington, USA June 11-13, 28 FrA9.3 Simulation Study of Oscillatory Vehicle Roll Behavior During Fishhook Maneuvers Nikolai Moshchuk, Cedric
Design and Integration of Suspension, Brake and Steering Systems for a Formula SAE Race Car
 Design and Integration of Suspension, Brake and Steering Systems for a Formula SAE Race Car Mark Holveck 01, Rodolphe Poussot 00, Harris Yong 00 Final Report May 5, 2000 MAE 340/440 Advisor: Prof. S. Bogdonoff
Design and Integration of Suspension, Brake and Steering Systems for a Formula SAE Race Car Mark Holveck 01, Rodolphe Poussot 00, Harris Yong 00 Final Report May 5, 2000 MAE 340/440 Advisor: Prof. S. Bogdonoff
Cars, Light Trucks Application The RoaDyn P650 is suited for measurements of wheel forces and -moments during all kinds of driving manoeuvres
 Force SUNSTAR 传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 E-MAIL: RoaDyn P650 Analog Wheel Force Transducer (WFT) for Heavy Passenger Cars, Light Trucks or SUVs Spinning wheel force transducer to
Force SUNSTAR 传感与控制 http://www.sensor-ic.com/ TEL:0755-83376549 E-MAIL: RoaDyn P650 Analog Wheel Force Transducer (WFT) for Heavy Passenger Cars, Light Trucks or SUVs Spinning wheel force transducer to
The Influence of Electronic Stability Control, Active Suspension, Driveline and Front Steering Integrated System on the Vehicle Ride and Handling
 Global Journal of Researches in Engineering Automotive Engineering Volume 13 Issue 1 Version 1.0 Type: Double Blind Peer Reviewed International Research Journal Publisher: Global Journals Inc. (USA) Online
Global Journal of Researches in Engineering Automotive Engineering Volume 13 Issue 1 Version 1.0 Type: Double Blind Peer Reviewed International Research Journal Publisher: Global Journals Inc. (USA) Online
The Effect of Weight Distribution on a Quarter Midget. Joey Dille
 The Effect of Weight Distribution on a Quarter Midget Joey Dille 1 Background Information A quarter midget is a type of racecar. It is similar to a go-kart with several major differences, the most conspicuous
The Effect of Weight Distribution on a Quarter Midget Joey Dille 1 Background Information A quarter midget is a type of racecar. It is similar to a go-kart with several major differences, the most conspicuous
Extracting Tire Model Parameters From Test Data
 WP# 2001-4 Extracting Tire Model Parameters From Test Data Wesley D. Grimes, P.E. Eric Hunter Collision Engineering Associates, Inc ABSTRACT Computer models used to study crashes require data describing
WP# 2001-4 Extracting Tire Model Parameters From Test Data Wesley D. Grimes, P.E. Eric Hunter Collision Engineering Associates, Inc ABSTRACT Computer models used to study crashes require data describing
SPMM OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000?
 SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
STEERING STABILITY BASED ON FUZZY-LOGIC. Beatriz L. Boada, María Jesús L. Boada,
 STEERING STABILITY BASED ON FUZZY-LOGIC Beatriz L. Boada, María Jesús L. Boada, Belén Muñoz and Vicente Díaz Mechanical Engineering Department. Carlos III University. Avd. de la Universidad, 30. 28911.
STEERING STABILITY BASED ON FUZZY-LOGIC Beatriz L. Boada, María Jesús L. Boada, Belén Muñoz and Vicente Díaz Mechanical Engineering Department. Carlos III University. Avd. de la Universidad, 30. 28911.
Environmental Envelope Control
 Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
Environmental Envelope Control May 26 th, 2014 Stanford University Mechanical Engineering Dept. Dynamic Design Lab Stephen Erlien Avinash Balachandran J. Christian Gerdes Motivation New technologies are
Characterisation of Longitudinal Response for a Full-Time Four Wheel Drive Vehicle
 2009 Vehicle Dynamics and Control Seminar Characterisation of Longitudinal Response for a Full-Time Four Wheel Drive Vehicle Jas Pawar (EngD Research Student) Sean Biggs (Project Supervisor & Principal
2009 Vehicle Dynamics and Control Seminar Characterisation of Longitudinal Response for a Full-Time Four Wheel Drive Vehicle Jas Pawar (EngD Research Student) Sean Biggs (Project Supervisor & Principal
Analysis. Techniques for. Racecar Data. Acquisition, Second Edition. By Jorge Segers INTERNATIONAL, Warrendale, Pennsylvania, USA
 Analysis Techniques for Racecar Data Acquisition, Second Edition By Jorge Segers INTERNATIONAL, Warrendale, Pennsylvania, USA Preface to the Second Edition xiii Preface to the First Edition xv Acknowledgments
Analysis Techniques for Racecar Data Acquisition, Second Edition By Jorge Segers INTERNATIONAL, Warrendale, Pennsylvania, USA Preface to the Second Edition xiii Preface to the First Edition xv Acknowledgments
Improvement of Vehicle Dynamics by Right-and-Left Torque Vectoring System in Various Drivetrains x
 Improvement of Vehicle Dynamics by Right-and-Left Torque Vectoring System in Various Drivetrains x Kaoru SAWASE* Yuichi USHIRODA* Abstract This paper describes the verification by calculation of vehicle
Improvement of Vehicle Dynamics by Right-and-Left Torque Vectoring System in Various Drivetrains x Kaoru SAWASE* Yuichi USHIRODA* Abstract This paper describes the verification by calculation of vehicle
SUMMARY OF STANDARD K&C TESTS AND REPORTED RESULTS
 Description of K&C Tests SUMMARY OF STANDARD K&C TESTS AND REPORTED RESULTS The Morse Measurements K&C test facility is the first of its kind to be independently operated and made publicly available in
Description of K&C Tests SUMMARY OF STANDARD K&C TESTS AND REPORTED RESULTS The Morse Measurements K&C test facility is the first of its kind to be independently operated and made publicly available in
A Methodology to Investigate the Dynamic Characteristics of ESP Hydraulic Units - Part II: Hardware-In-the-Loop Tests
 A Methodology to Investigate the Dynamic Characteristics of ESP Hydraulic Units - Part II: Hardware-In-the-Loop Tests Aldo Sorniotti Politecnico di Torino, Department of Mechanics Corso Duca degli Abruzzi
A Methodology to Investigate the Dynamic Characteristics of ESP Hydraulic Units - Part II: Hardware-In-the-Loop Tests Aldo Sorniotti Politecnico di Torino, Department of Mechanics Corso Duca degli Abruzzi
The Multibody Systems Approach to Vehicle Dynamics
 The Multibody Systems Approach to Vehicle Dynamics A Short Course Lecture 4 Tyre Characteristics Professor Mike Blundell Phd, MSc, BSc (Hons), FIMechE, CEng Course Agenda Day 1 Lecture 1 Introduction to
The Multibody Systems Approach to Vehicle Dynamics A Short Course Lecture 4 Tyre Characteristics Professor Mike Blundell Phd, MSc, BSc (Hons), FIMechE, CEng Course Agenda Day 1 Lecture 1 Introduction to
Bus Handling Validation and Analysis Using ADAMS/Car
 Bus Handling Validation and Analysis Using ADAMS/Car Marcelo Prado, Rodivaldo H. Cunha, Álvaro C. Neto debis humaitá ITServices Ltda. Argemiro Costa Pirelli Pneus S.A. José E. D Elboux DaimlerChrysler
Bus Handling Validation and Analysis Using ADAMS/Car Marcelo Prado, Rodivaldo H. Cunha, Álvaro C. Neto debis humaitá ITServices Ltda. Argemiro Costa Pirelli Pneus S.A. José E. D Elboux DaimlerChrysler
ENERGY ANALYSIS OF A POWERTRAIN AND CHASSIS INTEGRATED SIMULATION ON A MILITARY DUTY CYCLE
 U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER ENERGY ANALYSIS OF A POWERTRAIN AND CHASSIS INTEGRATED SIMULATION ON A MILITARY DUTY CYCLE GT Suite User s Conference: 9 November
U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER ENERGY ANALYSIS OF A POWERTRAIN AND CHASSIS INTEGRATED SIMULATION ON A MILITARY DUTY CYCLE GT Suite User s Conference: 9 November
GLOBAL ORGANIZATION - LOCAL SUPPORT TESTING EQUIPMENT
 GLOBAL ORGANIZATION - LOCAL SUPPORT TESTING EQUIPMENT CONTENTS Page Introduction 3 Endurance tester for passenger car & truck tires 4 Force and moment tester for passenger car & truck tires 5 Six position
GLOBAL ORGANIZATION - LOCAL SUPPORT TESTING EQUIPMENT CONTENTS Page Introduction 3 Endurance tester for passenger car & truck tires 4 Force and moment tester for passenger car & truck tires 5 Six position
Passenger Vehicle Steady-State Directional Stability Analysis Utilizing EDVSM and SIMON
 WP# 4-3 Passenger Vehicle Steady-State Directional Stability Analysis Utilizing and Daniel A. Fittanto, M.S.M.E., P.E. and Adam Senalik, M.S.G.E., P.E. Ruhl Forensic, Inc. Copyright 4 by Engineering Dynamics
WP# 4-3 Passenger Vehicle Steady-State Directional Stability Analysis Utilizing and Daniel A. Fittanto, M.S.M.E., P.E. and Adam Senalik, M.S.G.E., P.E. Ruhl Forensic, Inc. Copyright 4 by Engineering Dynamics
Fault-tolerant control of electric vehicles with inwheel motors using actuator-grouping sliding mode controllers
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 216 Fault-tolerant control of electric vehicles
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 216 Fault-tolerant control of electric vehicles
SPMM OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000?
 SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
TÜV SÜD Tire Test 2017
 TÜV SÜD Tire Test 2017 255/50 R19 Dunlop Sport Maxx RT2 SUV Tire Performance Test acc. to PPP 90023A:2014 Test Period: October 2017 Report No. 713117618D-06 TIRE DETAILS DIMENSION: 255/50 R19 TIRE BRANDS
TÜV SÜD Tire Test 2017 255/50 R19 Dunlop Sport Maxx RT2 SUV Tire Performance Test acc. to PPP 90023A:2014 Test Period: October 2017 Report No. 713117618D-06 TIRE DETAILS DIMENSION: 255/50 R19 TIRE BRANDS
Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for In-wheel Electric Vehicle
 World Electric ehicle Journal ol. 6 - ISSN 232-6653 - 23 WEA Page Page 86 ES27 Barcelona, Spain, November 7-2, 23 Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for
World Electric ehicle Journal ol. 6 - ISSN 232-6653 - 23 WEA Page Page 86 ES27 Barcelona, Spain, November 7-2, 23 Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for
Using Adams as master model for ECU system simulation
 Using Adams as master model for ECU system simulation Dipl.-Ing. Simon Schmeiler Technische Universität München Fakultät für Maschinenwesen Lehrstuhl für Fahrzeugtechnik (FTM) Dipl.-Ing. Karl-Eric Köstlin
Using Adams as master model for ECU system simulation Dipl.-Ing. Simon Schmeiler Technische Universität München Fakultät für Maschinenwesen Lehrstuhl für Fahrzeugtechnik (FTM) Dipl.-Ing. Karl-Eric Köstlin
The vehicle coordinate system shown in the Figure is explained below:
 Parametric Analysis of Four Wheel Vehicle Using Adams/Car Jadav Chetan S. 1, Patel Priyal R. 2 1 Assistant Professor at Shri S ad Vidya Mandal Institute of Technology, Bharuch-392001, Gujarat, India. 2
Parametric Analysis of Four Wheel Vehicle Using Adams/Car Jadav Chetan S. 1, Patel Priyal R. 2 1 Assistant Professor at Shri S ad Vidya Mandal Institute of Technology, Bharuch-392001, Gujarat, India. 2
Driving dynamics and hybrid combined in the torque vectoring
 Driving dynamics and hybrid combined in the torque vectoring Concepts of axle differentials with hybrid functionality and active torque distribution Vehicle Dynamics Expo 2009 Open Technology Forum Dr.
Driving dynamics and hybrid combined in the torque vectoring Concepts of axle differentials with hybrid functionality and active torque distribution Vehicle Dynamics Expo 2009 Open Technology Forum Dr.
INTELLIGENT ACTIVE ROLL CONTROL SHAUN TATE
 INTELLIGENT ACTIVE ROLL CONTROL SHAUN TATE 1 Production Experience & Awards Series Production 12V BMW 7 Series 2015 BMW 5 Series 2017 RR Phantom 2018 Series Production 48V Bentley Bentayga 2015 Audi SQ7
INTELLIGENT ACTIVE ROLL CONTROL SHAUN TATE 1 Production Experience & Awards Series Production 12V BMW 7 Series 2015 BMW 5 Series 2017 RR Phantom 2018 Series Production 48V Bentley Bentayga 2015 Audi SQ7
PID PLUS FUZZY LOGIC METHOD FOR TORQUE CONTROL IN TRACTION CONTROL SYSTEM
 International Journal of Automotive Technology, Vol. 13, No. 3, pp. 441 450 (2012) DOI 10.1007/s12239 012 0041 4 Copyright 2012 KSAE/ 064 10 pissn 1229 9138/ eissn 1976-3832 PID PLUS FUZZY LOGIC METHOD
International Journal of Automotive Technology, Vol. 13, No. 3, pp. 441 450 (2012) DOI 10.1007/s12239 012 0041 4 Copyright 2012 KSAE/ 064 10 pissn 1229 9138/ eissn 1976-3832 PID PLUS FUZZY LOGIC METHOD
Modification of IPG Driver for Road Robustness Applications
 Modification of IPG Driver for Road Robustness Applications Alexander Shawyer (BEng, MSc) Alex Bean (BEng, CEng. IMechE) SCS Analysis & Virtual Tools, Braking Development Jaguar Land Rover Introduction
Modification of IPG Driver for Road Robustness Applications Alexander Shawyer (BEng, MSc) Alex Bean (BEng, CEng. IMechE) SCS Analysis & Virtual Tools, Braking Development Jaguar Land Rover Introduction
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics.
 Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
TÜV SÜD - Tire Test 2017
 TÜV SÜD - Tire Test 2017 255/50 R19 Goodyear Eagle F1 Asymmetric 3 SUV Tire Performance Test acc. to PPP 90023A:2014 Test Period: October 2017 TIRE DETAILS DIMENSION: 255/50 R19 TIRE BRANDS / PATTERNS
TÜV SÜD - Tire Test 2017 255/50 R19 Goodyear Eagle F1 Asymmetric 3 SUV Tire Performance Test acc. to PPP 90023A:2014 Test Period: October 2017 TIRE DETAILS DIMENSION: 255/50 R19 TIRE BRANDS / PATTERNS
Vehicle dynamics Suspension effects on cornering
 Vehicle dynamics Suspension effects on cornering Pierre Duysinx LTAS Automotive Engineering University of Liege Academic Year 2013-2014 1 Bibliography T. Gillespie. «Fundamentals of vehicle Dynamics»,
Vehicle dynamics Suspension effects on cornering Pierre Duysinx LTAS Automotive Engineering University of Liege Academic Year 2013-2014 1 Bibliography T. Gillespie. «Fundamentals of vehicle Dynamics»,
Identification of A Vehicle Pull Mechanism
 Seoul 2000 FISITA World Automotive Congress June 12-15, 2000, Seoul, Korea F2000G353 Identification of A Vehicle Pull Mechanism Sang-Hyun Oh*, Young-Hee Cho, Gwanghun Gim Vehicle Dynamics Research Team,
Seoul 2000 FISITA World Automotive Congress June 12-15, 2000, Seoul, Korea F2000G353 Identification of A Vehicle Pull Mechanism Sang-Hyun Oh*, Young-Hee Cho, Gwanghun Gim Vehicle Dynamics Research Team,
a) Calculate the overall aerodynamic coefficient for the same temperature at altitude of 1000 m.
 Calculate the overall aerodynamic coefficient for the same temperature at altitude of 1000 m.") Problem 3.1 The rolling resistance force is reduced on a slope by a cosine factor ( cos ). On the other hand, on a slope the gravitational force is added to the resistive forces. Assume a constant rolling
Problem 3.1 The rolling resistance force is reduced on a slope by a cosine factor ( cos ). On the other hand, on a slope the gravitational force is added to the resistive forces. Assume a constant rolling
Data acquisition and analysis tools
 Workshop Goals Introduce Data acquisition tools and Laptime simulation tools Show what to look for in logged data and what to focus on. Discuss the appropriate use of racecar simulation tools. Present
Workshop Goals Introduce Data acquisition tools and Laptime simulation tools Show what to look for in logged data and what to focus on. Discuss the appropriate use of racecar simulation tools. Present
TIRE MODEL FOR SIMULATIONS OF VEHICLE MOTION ON HIGH AND LOW FRICTION ROAD SURFACES
 HENRI COANDA AIR FORCE ACADEMY ROMANIA INTERNATIONAL CONFERENCE of SCIENTIFIC PAPER AFASES 2012 Brasov, 24-26 May 2012 GENERAL M.R. STEFANIK ARMED FORCES ACADEMY SLOVAK REPUBLIC TIRE MODEL FOR SIMULATIONS
HENRI COANDA AIR FORCE ACADEMY ROMANIA INTERNATIONAL CONFERENCE of SCIENTIFIC PAPER AFASES 2012 Brasov, 24-26 May 2012 GENERAL M.R. STEFANIK ARMED FORCES ACADEMY SLOVAK REPUBLIC TIRE MODEL FOR SIMULATIONS
GENERAL 0-1 CONTENTS EXTERNAL VIEW... 2 MODEL LINEUP... 2 MODEL AND VARIANT CODES... 3 AIMS OF DEVELOPMENT... 3 TECHNICAL FEATURES...
 0-1 GENERAL CONTENTS EXTERNAL VIEW........................ 2 MODEL LINEUP......................... 2 MODEL AND VARIANT CODES.......... 3 AIMS OF DEVELOPMENT................ 3 TECHNICAL FEATURES.................
0-1 GENERAL CONTENTS EXTERNAL VIEW........................ 2 MODEL LINEUP......................... 2 MODEL AND VARIANT CODES.......... 3 AIMS OF DEVELOPMENT................ 3 TECHNICAL FEATURES.................
JRS Dynamic Rollover Test Toyota Prius
 Page 1 of 62 JRS Dynamic Rollover Test 2010 Toyota Prius Sponsored By: Automotive Safety Research Institute Charlottesville, VA. Vehicle Donated by: State Farm Insurance Company Chicago, IL. Introduction
Page 1 of 62 JRS Dynamic Rollover Test 2010 Toyota Prius Sponsored By: Automotive Safety Research Institute Charlottesville, VA. Vehicle Donated by: State Farm Insurance Company Chicago, IL. Introduction
Constructive Influences of the Energy Recovery System in the Vehicle Dampers
 Constructive Influences of the Energy Recovery System in the Vehicle Dampers Vlad Serbanescu, Horia Abaitancei, Gheorghe-Alexandru Radu, Sebastian Radu Transilvania University Brasov B-dul Eroilor nr.
Constructive Influences of the Energy Recovery System in the Vehicle Dampers Vlad Serbanescu, Horia Abaitancei, Gheorghe-Alexandru Radu, Sebastian Radu Transilvania University Brasov B-dul Eroilor nr.
POWER TRAIN 2-1 CONTENTS AYC SYSTEM... 9 CLUTCH... 2 MANUAL TRANSMISSION... 3 PROPELLER SHAFTS... 4 FRONT AXLE... 5 REAR AXLE... 6
 2-1 POWER TRAIN CONTENTS CLUTCH................................ 2 MANUAL TRANSMISSION............... 3 Transmission Control....................... 3 PROPELLER SHAFTS................... 4 FRONT AXLE...........................
2-1 POWER TRAIN CONTENTS CLUTCH................................ 2 MANUAL TRANSMISSION............... 3 Transmission Control....................... 3 PROPELLER SHAFTS................... 4 FRONT AXLE...........................
Review on Handling Characteristics of Road Vehicles
 RESEARCH ARTICLE OPEN ACCESS Review on Handling Characteristics of Road Vehicles D. A. Panke 1*, N. H. Ambhore 2, R. N. Marathe 3 1 Post Graduate Student, Department of Mechanical Engineering, Vishwakarma
RESEARCH ARTICLE OPEN ACCESS Review on Handling Characteristics of Road Vehicles D. A. Panke 1*, N. H. Ambhore 2, R. N. Marathe 3 1 Post Graduate Student, Department of Mechanical Engineering, Vishwakarma
Dylan Lewis Lewton. Dissertations and Theses
 Dissertations and Theses 12-2016 Application of Floating Pedal Regenerative Braking for a Rear-Wheel-Drive Parallel-Series Plug-In Hybrid Electric Vehicle with an Automatic Transmission Dylan Lewis Lewton
Dissertations and Theses 12-2016 Application of Floating Pedal Regenerative Braking for a Rear-Wheel-Drive Parallel-Series Plug-In Hybrid Electric Vehicle with an Automatic Transmission Dylan Lewis Lewton
ANTI-LOCK BRAKE SYSTEM. Seminar by K.JAYAKISHORE GRIET HYDERABAD
 ANTI-LOCK BRAKE SYSTEM Seminar by K.JAYAKISHORE GRIET HYDERABAD INTRODUCTION An anti-lock braking system (ABS) is a safety system on motor vehicles which prevents the wheels from locking while braking.
ANTI-LOCK BRAKE SYSTEM Seminar by K.JAYAKISHORE GRIET HYDERABAD INTRODUCTION An anti-lock braking system (ABS) is a safety system on motor vehicles which prevents the wheels from locking while braking.
Modelling and simulation of full vehicle to study its dynamic behavior
 Modelling and simulation of full vehicle to study its dynamic behavior 1 Prof. Sachin Jadhao, 2 Mr. Milind K Patil 1 Assistant Professor, 2 Student of ME (Design) Mechanical Engineering J.S.P.M s Rajarshi
Modelling and simulation of full vehicle to study its dynamic behavior 1 Prof. Sachin Jadhao, 2 Mr. Milind K Patil 1 Assistant Professor, 2 Student of ME (Design) Mechanical Engineering J.S.P.M s Rajarshi
Analysis and control of vehicle steering wheel angular vibrations
 Analysis and control of vehicle steering wheel angular vibrations T. LANDREAU - V. GILLET Auto Chassis International Chassis Engineering Department Summary : The steering wheel vibration is analyzed through
Analysis and control of vehicle steering wheel angular vibrations T. LANDREAU - V. GILLET Auto Chassis International Chassis Engineering Department Summary : The steering wheel vibration is analyzed through
JRS Dynamic Rollover Test Scion xb
 Page 1 of 57 JRS Dynamic Rollover Test 2008 Scion xb Sponsored By: Automotive Safety Research Institute Charlottesville, VA. Introduction Page 2 of 57 Center for Injury Research conducted a JRS dynamic
Page 1 of 57 JRS Dynamic Rollover Test 2008 Scion xb Sponsored By: Automotive Safety Research Institute Charlottesville, VA. Introduction Page 2 of 57 Center for Injury Research conducted a JRS dynamic
General Vehicle Information
 Vehicle #3921 Chevrolet Equinox (2CNALBEW8A6XXXXXX) Inspection Date: 1-Feb-211 Year 21 Make Model Body Style HVE Display Name: Year Range: Sisters and Clones: Vehicle Category: Vehicle Class: VIN: Date
Vehicle #3921 Chevrolet Equinox (2CNALBEW8A6XXXXXX) Inspection Date: 1-Feb-211 Year 21 Make Model Body Style HVE Display Name: Year Range: Sisters and Clones: Vehicle Category: Vehicle Class: VIN: Date
Proposal of a Range Extension Control System with Arbitrary Steering for In-Wheel Motor Electric Vehicle with Four Wheel Steering
 Proposal of a Range Extension Control System with Arbitrary Steering for In-Wheel Motor Electric Vehicle with Four Wheel Steering Toshihiro Yone and Hiroshi Fujimoto The University of Tokyo 5-1-5, Kashiwanoha,
Proposal of a Range Extension Control System with Arbitrary Steering for In-Wheel Motor Electric Vehicle with Four Wheel Steering Toshihiro Yone and Hiroshi Fujimoto The University of Tokyo 5-1-5, Kashiwanoha,
Modeling, Analysis and Control Methods for Improving Vehicle Dynamic Behavior (Overview)
") Special Issue Modeling, Analysis and Control Methods for Improving Vehicle Dynamic Behavior Review Modeling, Analysis and Control Methods for Improving Vehicle Dynamic Behavior (Overview) Toshimichi Takahashi
Special Issue Modeling, Analysis and Control Methods for Improving Vehicle Dynamic Behavior Review Modeling, Analysis and Control Methods for Improving Vehicle Dynamic Behavior (Overview) Toshimichi Takahashi
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
Development of Integrated Vehicle Dynamics Control System S-AWC
 Development of Integrated Vehicle Dynamics Control System S-AWC Takami MIURA* Yuichi USHIRODA* Kaoru SAWASE* Naoki TAKAHASHI* Kazufumi HAYASHIKAWA** Abstract The Super All Wheel Control (S-AWC) for LANCER
Development of Integrated Vehicle Dynamics Control System S-AWC Takami MIURA* Yuichi USHIRODA* Kaoru SAWASE* Naoki TAKAHASHI* Kazufumi HAYASHIKAWA** Abstract The Super All Wheel Control (S-AWC) for LANCER
Appendix A: Motion Control Theory
 Appendix A: Motion Control Theory Objectives The objectives for this appendix are as follows: Learn about valve step response. Show examples and terminology related to valve and system damping. Gain an
Appendix A: Motion Control Theory Objectives The objectives for this appendix are as follows: Learn about valve step response. Show examples and terminology related to valve and system damping. Gain an
Anti Locking Brakes. Seminar by JYOTI RANJAN NAYAK. Regd no:
 Anti Locking Brakes Seminar by JYOTI RANJAN NAYAK Regd no: 0501227541 Introduction An anti-lock braking system (ABS) is a safety system on motor vehicles which prevents the wheels from locking while braking.
Anti Locking Brakes Seminar by JYOTI RANJAN NAYAK Regd no: 0501227541 Introduction An anti-lock braking system (ABS) is a safety system on motor vehicles which prevents the wheels from locking while braking.
I. Tire Heat Generation and Transfer:
 Caleb Holloway - Owner calebh@izzeracing.com +1 (443) 765 7685 I. Tire Heat Generation and Transfer: It is important to first understand how heat is generated within a tire and how that heat is transferred
Caleb Holloway - Owner calebh@izzeracing.com +1 (443) 765 7685 I. Tire Heat Generation and Transfer: It is important to first understand how heat is generated within a tire and how that heat is transferred
The Synaptic Damping Control System:
 The Synaptic Damping Control System: increasing the drivers feeling and perception by means of controlled dampers Giordano Greco Magneti Marelli SDC Vehicle control strategies From passive to controlled
The Synaptic Damping Control System: increasing the drivers feeling and perception by means of controlled dampers Giordano Greco Magneti Marelli SDC Vehicle control strategies From passive to controlled
Feature Article. Wheel Slip Simulation for Dynamic Road Load Simulation. Bryce Johnson. Application Reprint of Readout No. 38.
 Feature Article Feature Wheel Slip Simulation Article for Dynamic Road Load Simulation Application Application Reprint of Readout No. 38 Wheel Slip Simulation for Dynamic Road Load Simulation Bryce Johnson
Feature Article Feature Wheel Slip Simulation Article for Dynamic Road Load Simulation Application Application Reprint of Readout No. 38 Wheel Slip Simulation for Dynamic Road Load Simulation Bryce Johnson
JRS Dynamic Rollover Test Toyota Camry
 Page 1 of 60 JRS Dynamic Rollover Test 2007 Toyota Camry Hybrid Version Sponsored By: Automotive Safety Research Institute Charlottesville, VA. Introduction Page 2 of 60 Center for Injury Research conducted
Page 1 of 60 JRS Dynamic Rollover Test 2007 Toyota Camry Hybrid Version Sponsored By: Automotive Safety Research Institute Charlottesville, VA. Introduction Page 2 of 60 Center for Injury Research conducted
1.4 CORNERING PROPERTIES OF TIRES 39
 1.4 CORNERING PROPERTIES OF TIRES 39 Fig. 1.30 Variation of self-aligning torque with cornering force of a car tire under various normal loads. (Reproduced with permission of the Society of Automotive
1.4 CORNERING PROPERTIES OF TIRES 39 Fig. 1.30 Variation of self-aligning torque with cornering force of a car tire under various normal loads. (Reproduced with permission of the Society of Automotive
The Multibody Systems Approach to Vehicle Dynamics
 The Multibody Systems Approach to Vehicle Dynamics A Short Course Lecture 6 Modelling and Analysis of the Full Vehicle Professor Mike Blundell Phd, MSc, BSc (Hons), FIMechE, CEng Course Agenda Day 1 Lecture
The Multibody Systems Approach to Vehicle Dynamics A Short Course Lecture 6 Modelling and Analysis of the Full Vehicle Professor Mike Blundell Phd, MSc, BSc (Hons), FIMechE, CEng Course Agenda Day 1 Lecture
MOTOR VEHICLE HANDLING AND STABILITY PREDICTION
 MOTOR VEHICLE HANDLING AND STABILITY PREDICTION Stan A. Lukowski ACKNOWLEDGEMENT This report was prepared in fulfillment of the Scholarly Activity Improvement Fund for the 2007-2008 academic year funded
MOTOR VEHICLE HANDLING AND STABILITY PREDICTION Stan A. Lukowski ACKNOWLEDGEMENT This report was prepared in fulfillment of the Scholarly Activity Improvement Fund for the 2007-2008 academic year funded
Oversteer / Understeer
 Abstract An important part of tyre testing is the measurement of tyre performance in respect to oversteer and under steer. Over or Understeer results from a number of factors including cornering speed,
Abstract An important part of tyre testing is the measurement of tyre performance in respect to oversteer and under steer. Over or Understeer results from a number of factors including cornering speed,
Compatible Measuring Systems for Data Acquisition of Vehicle Dynamics
 Compatible Measuring Systems for Data Acquisition of Vehicle Dynamics Dr. Bertold Huber, GeneSys Elektronik GmbH, Offenburg Dr. Reinhard Drews, Steinbeis-Transfer-Zentrum Schwarzwald, Schallstadt Abstract
Compatible Measuring Systems for Data Acquisition of Vehicle Dynamics Dr. Bertold Huber, GeneSys Elektronik GmbH, Offenburg Dr. Reinhard Drews, Steinbeis-Transfer-Zentrum Schwarzwald, Schallstadt Abstract
CHAPTER 4 : RESISTANCE TO PROGRESS OF A VEHICLE - MEASUREMENT METHOD ON THE ROAD - SIMULATION ON A CHASSIS DYNAMOMETER
 CHAPTER 4 : RESISTANCE TO PROGRESS OF A VEHICLE - MEASUREMENT METHOD ON THE ROAD - SIMULATION ON A CHASSIS DYNAMOMETER 1. Scope : This Chapter describes the methods to measure the resistance to the progress
CHAPTER 4 : RESISTANCE TO PROGRESS OF A VEHICLE - MEASUREMENT METHOD ON THE ROAD - SIMULATION ON A CHASSIS DYNAMOMETER 1. Scope : This Chapter describes the methods to measure the resistance to the progress
Steady State Handling
 MECH 4420 Homework #5 Due Friday 3/23/2018 in class (Note: checko due 3/9/2018) Steady State Handling The steady-state handling results that we developed in class give a lot o insight into what happens
MECH 4420 Homework #5 Due Friday 3/23/2018 in class (Note: checko due 3/9/2018) Steady State Handling The steady-state handling results that we developed in class give a lot o insight into what happens
Aerodynamic Drag Assessment
 Aerodynamic Drag Assessment Computer Fluid Dynamics (CFD) analysis was used in the ULSAB-AVC Program to evaluate the aerodynamic concept from the very beginning of vehicle concepts. 11.1 BACKGROUND A vehicle
Aerodynamic Drag Assessment Computer Fluid Dynamics (CFD) analysis was used in the ULSAB-AVC Program to evaluate the aerodynamic concept from the very beginning of vehicle concepts. 11.1 BACKGROUND A vehicle
MODELING AND SIMULATION OF 14 DOF VEHICLE DYNAMICS AMRIK SINGH A/L PHUMAN SINGH UNIVERSITI TEKNIKAL MALAYSIA MELAKA
 MODELING AND SIMULATION OF 14 DOF VEHICLE DYNAMICS AMIK SINGH A/L PHUMAN SINGH UNIVESITI TEKNIKAL MALAYSIA MELAKA MODELING AND SIMULATION OF 14 DOF VEHICLE DYNAMICS AMIK SINGH A/L PHUMAN SINGH This thesis
MODELING AND SIMULATION OF 14 DOF VEHICLE DYNAMICS AMIK SINGH A/L PHUMAN SINGH UNIVESITI TEKNIKAL MALAYSIA MELAKA MODELING AND SIMULATION OF 14 DOF VEHICLE DYNAMICS AMIK SINGH A/L PHUMAN SINGH This thesis
JRS Dynamic Rollover Test Chevrolet Malibu
 Page 1 of 61 JRS Dynamic Rollover Test 2009 Chevrolet Malibu Sponsored By: Automotive Safety Research Institute Charlottesville, VA. Vehicle Donated by: State Farm Insurance Company Chicago, IL. Introduction
Page 1 of 61 JRS Dynamic Rollover Test 2009 Chevrolet Malibu Sponsored By: Automotive Safety Research Institute Charlottesville, VA. Vehicle Donated by: State Farm Insurance Company Chicago, IL. Introduction
Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for In-wheel Electric Vehicle
 ES27 Barcelona, Spain, November 7-2, 23 Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for In-wheel Electric ehicle Sungyeon Ko, Chulho Song, Jeongman Park, Jiweon
ES27 Barcelona, Spain, November 7-2, 23 Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for In-wheel Electric ehicle Sungyeon Ko, Chulho Song, Jeongman Park, Jiweon
RST 5 RACING BRAKE PADS FOR RALLY CARS RALLY THE REVOLUTION IN RALLY BRAKING
 RALLY RST 5 THE REVOLUTION IN RALLY BRAKING RACING BRAKE PADS FOR RALLY CARS THE NEW RST 5 IS THE PERFECT RALLY BRAKE PAD CRISTIAN GARCÍA, TEAM RMC 2016 SPANISH TARMAC RALLY CHAMPION QUALITY RALLY RST
RALLY RST 5 THE REVOLUTION IN RALLY BRAKING RACING BRAKE PADS FOR RALLY CARS THE NEW RST 5 IS THE PERFECT RALLY BRAKE PAD CRISTIAN GARCÍA, TEAM RMC 2016 SPANISH TARMAC RALLY CHAMPION QUALITY RALLY RST
Racing Tires in Formula SAE Suspension Development
 The University of Western Ontario Department of Mechanical and Materials Engineering MME419 Mechanical Engineering Project MME499 Mechanical Engineering Design (Industrial) Racing Tires in Formula SAE
The University of Western Ontario Department of Mechanical and Materials Engineering MME419 Mechanical Engineering Project MME499 Mechanical Engineering Design (Industrial) Racing Tires in Formula SAE
ME 466 PERFORMANCE OF ROAD VEHICLES 2016 Spring Homework 3 Assigned on Due date:
 PROBLEM 1 For the vehicle with the attached specifications and road test results a) Draw the tractive effort [N] versus velocity [kph] for each gear on the same plot. b) Draw the variation of total resistance
PROBLEM 1 For the vehicle with the attached specifications and road test results a) Draw the tractive effort [N] versus velocity [kph] for each gear on the same plot. b) Draw the variation of total resistance
ABS. Prof. R.G. Longoria Spring v. 1. ME 379M/397 Vehicle System Dynamics and Control
 ABS Prof. R.G. Longoria Spring 2002 v. 1 Anti-lock Braking Systems These systems monitor operating conditions and modify the applied braking torque by modulating the brake pressure. The systems try to
ABS Prof. R.G. Longoria Spring 2002 v. 1 Anti-lock Braking Systems These systems monitor operating conditions and modify the applied braking torque by modulating the brake pressure. The systems try to
Tech Tip: Springs & Dampers, Part One The Phantom Knowledge
 Tech Tip: Springs & Dampers, Part One The Phantom Knowledge By Matt Giaraffa matt.giaraffa@optimumg.com When out on the track, you can spend an entire weekend tuning spring rates and shock settings, and
Tech Tip: Springs & Dampers, Part One The Phantom Knowledge By Matt Giaraffa matt.giaraffa@optimumg.com When out on the track, you can spend an entire weekend tuning spring rates and shock settings, and
In Wheel Motors and their Value Propositions in the Automotive Industry
 In Wheel Motors and their Value Propositions in the Automotive Industry Dr Richard Ford Vehicle Engineering and Controls Manager 12 th September 2018 Contents 1. 2. 3. 4. ProteanDrive overview Approximate
In Wheel Motors and their Value Propositions in the Automotive Industry Dr Richard Ford Vehicle Engineering and Controls Manager 12 th September 2018 Contents 1. 2. 3. 4. ProteanDrive overview Approximate
Accident Reconstruction & Vehicle Data Recovery Systems and Uses
 Research Engineers, Inc. (919) 781-7730 7730 Collision Analysis Engineering Animation Accident Reconstruction & Vehicle Data Recovery Systems and Uses Bill Kluge Thursday, May 21, 2009 Accident Reconstruction
Research Engineers, Inc. (919) 781-7730 7730 Collision Analysis Engineering Animation Accident Reconstruction & Vehicle Data Recovery Systems and Uses Bill Kluge Thursday, May 21, 2009 Accident Reconstruction
HANDLING CHARACTERISTICS CORRELATION OF A FORMULA SAE VEHICLE MODEL
 HANDLING CHARACTERISTICS CORRELATION OF A FORMULA SAE VEHICLE MODEL Jason Ye Team: Christopher Fowler, Peter Karkos, Tristan MacKethan, Hubbard Velie Instructors: Jesse Austin-Breneman, A. Harvey Bell
HANDLING CHARACTERISTICS CORRELATION OF A FORMULA SAE VEHICLE MODEL Jason Ye Team: Christopher Fowler, Peter Karkos, Tristan MacKethan, Hubbard Velie Instructors: Jesse Austin-Breneman, A. Harvey Bell
Freight Gauge Nuances. Presented by Martin Osman 4 th November 2015
 Freight Gauge Nuances Presented by Martin Osman 4 th November 2015 Introduction What s new in the field of freight gauging? Established or Benchmark suspension Standard Vehicle Gauge Data sheets (SVGD)
Freight Gauge Nuances Presented by Martin Osman 4 th November 2015 Introduction What s new in the field of freight gauging? Established or Benchmark suspension Standard Vehicle Gauge Data sheets (SVGD)
Performance comparison of collision avoidance controller designs
 Performance comparison of collision avoidance controller designs Geraint P. Bevan, Simon J. O Neill, Henrik Gollee and John O Reilly Centre for Systems and Control, University of Glasgow Glasgow G1 8QQ,
Performance comparison of collision avoidance controller designs Geraint P. Bevan, Simon J. O Neill, Henrik Gollee and John O Reilly Centre for Systems and Control, University of Glasgow Glasgow G1 8QQ,
ROLLOVER CRASHWORTHINESS OF A RURAL TRANSPORT VEHICLE USING MADYMO
 ROLLOVER CRASHWORTHINESS OF A RURAL TRANSPORT VEHICLE USING MADYMO S. Mukherjee, A. Chawla, A. Nayak, D. Mohan Indian Institute of Technology, New Delhi INDIA ABSTRACT In this work a full vehicle model
ROLLOVER CRASHWORTHINESS OF A RURAL TRANSPORT VEHICLE USING MADYMO S. Mukherjee, A. Chawla, A. Nayak, D. Mohan Indian Institute of Technology, New Delhi INDIA ABSTRACT In this work a full vehicle model
Power Pack Testing at Environment Canada s Testing Facilities Heavy-Duty Vehicle and Engine Greenhouse Gas Emission Regulations
 Power Pack Testing at Environment Canada s Testing Facilities Heavy-Duty Vehicle and Engine Greenhouse Gas Emission Regulations San Francisco, CA, USA October 22, 2013. Outline Background Heavy-Duty Vehicle
Power Pack Testing at Environment Canada s Testing Facilities Heavy-Duty Vehicle and Engine Greenhouse Gas Emission Regulations San Francisco, CA, USA October 22, 2013. Outline Background Heavy-Duty Vehicle