UAVs Conquer The Skies April 07, :00 AM 1211 Electronic Design William Wong
|
|
|
- Oswald Walton
- 5 years ago
- Views:
Transcription
.")
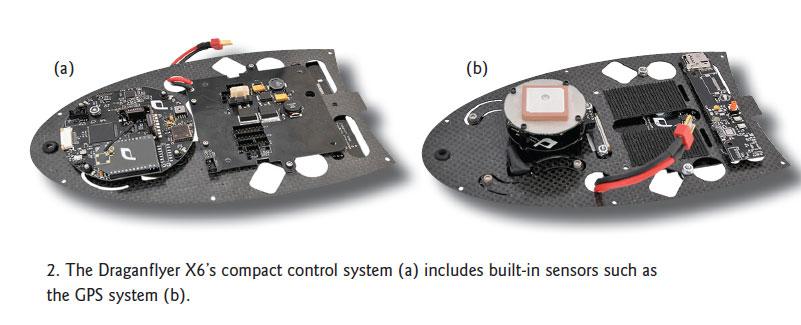
1 UAVs Conquer The Skies April 07, :00 AM 1211 Electronic Design William Wong Unmanned aerial vehicles (UAVs) come in all shapes and sizes. They range from tiny microbots to high-flying drones like the General Atomics MQ-9 Reaper, which is ready for reconnaissance or combat (see Unmanned Military Vehicles: Robots On The Rise ). Remote operation is common, but autonomous and semi-autonomous operation are in high demand since they have fewer technical requirements and often provide more reliable operation than human operators. The U.S. Air Force uses large aircraft like Northrop Grumman s Global Hawk for surveillance. It can loiter for more than a day and a half with a ceiling over 65,000 feet. Its high-resolution synthetic aperture radar (SAR) can generate images with 1.0/0.3-m resolution (WAS/Spot). It also can survey as much as 40,000 square miles in a day. It s more compact than a comparable manned aircraft, but it uses an Allison Rolls-Royce AE3007H turbofan engine. The body is built from high strength-to-weight composites. Gas and jet engines are common in larger platforms because they offer more power and performance. Very small engines are common on radio controlled (RC) planes flown by hobbyists, but they tend to be rather noisy. Designers can be less concerned about noise with highflying UAVs, though small UAVs tend to fly closer to the ground where they can be easily heard. One alternative, electric propulsion, has been widely used. Electric motors have advantages for smaller UAV applications because they can be small and are very reliable. They also eliminate the need for liquid fuel as well as the heat and lubrication issues associated with gas engines. Electric motors are quieter as well, which is an advantage in surveillance applications. ELECTRIC FLYERS The Draganfly Innovations Draganflyer X6 is a compact, almost silent electric helicopter (Fig. 1). It has six counter-rotating carbon fiber rotors paired with six very quiet, maintenance-free brushless dc motors. It can fly even if one rotor or motor is inoperable. The system also recognizes when a motor is stopped and will periodically attempt restart while limiting the amount of power used. Noise at 3 m is only 60 db. The system is designed to provide a very stable platform. Its SteadyFlight technology (Fig. 2) employs three gyros, three accelerometers, three magnetometers, a barometric pressure sensor, and a GPS receiver for semi-autonomous operation. The flight data recorder uses a removable 2-Gbyte MicroSD memory card. The helicopter has a ceiling of 8000 ft. It has a flight time of 20 minutes without a payload using a single 14.8-V lithium-polymer 2700-mAh battery. Its maximum speed is 30 mph, with a climb rate of 23 ft/s and a descent rate of 13 ft/s. The Draganflyer X6 can be flown indoors and outdoors as well. The platform is designed for a relatively calm environment. It can handle 18-mph windspeeds, although Draganfly recommends a maximum of 10 mph for novice pilots. The Draganflyer X6 can hold the payload stable in a 6-mph wind. This allows conventional non-stabilized cameras to be used with the platform. Electronically stabilized camcorders would provide additional stability and operation in higher windspeeds. Draganfly makes a number of cameras available, including a 10-Mpixel still camera, a 1080p HD camera, a thermal forward-looking infrared (FLIR) camera, a low-light camera, and a micro analog color camera. The camera mount includes a tilt servo and oil-filled, spring-loaded shock absorbers. Page 1 of 10
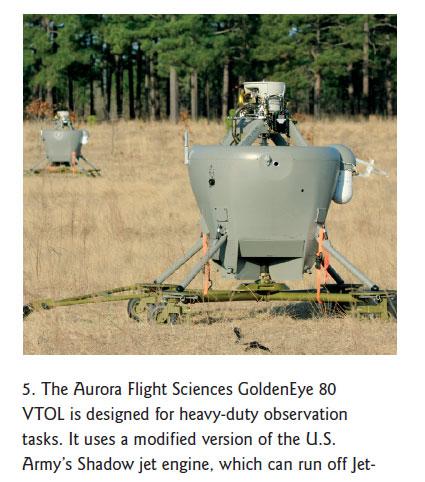
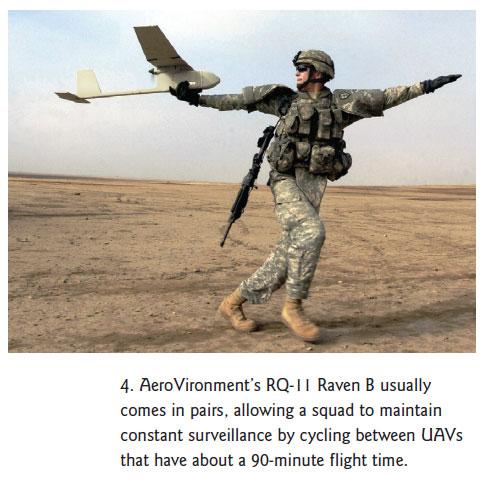
2 Control is maintained using a 2.5-GHz direct sequence spread spectrum (DSSS) data link with a 250-kbit/s bandwidth. The separate video link, which is NTSC and PAL compatible, operates at 5.8 GHz. The handheld controller (Fig. 3) is designed for ease of use. The SteadyFlight support allows features such as the ability to maintain position using the GPS and simply move up or down within that space. Draganfly provides training and recommends a minimum of two hours of flight time before deploying a Draganflyer X6. The Draganflyer X6 is being used in autonomous and waypoint-oriented flight research with computer-on-module components like those available from Gumstix (see A Pack of Gumstix ). The man-portable Draganflyer X6 folds up for carrying. It fits inside a 5.5-in. diameter 28-in. tube. The craft will also fold upon impact to prevent damage. It only weighs 1 kg and has a 500-g payload capacity, which is sufficient for a range of cameras and sensors that can be mounted under the craft. The UAV provides a stable platform, allowing almost any sensor to be used. Carbon fibers and glass-filled injection nylon help keep the weight down while providing a solid airframe. Pricing starts around $10,000. ELECTRIC PLANE Planes can loiter but they need to keep moving or come crashing down to earth. They are also more power efficient than helicopters, making them preferable for long-range, long-duration UAVs. AeroVironment s man-portable RQ-11 Raven B (Fig. 4) is in high demand with U.S. ground troops. A backpack system includes a pair of aircraft and an 11-lb ground control unit (GCU). It typically is equipped with a color or infrared camera and side-looking camera that can transmit live streaming video via radio. The camera can be swapped out by replacing the nose cone. This hand-launched, 9.25-kg, 97-cm long aircraft has a 1.4-m wingspan. Like many small aircraft, it lands using a deep stall. Essentially, the nose flips up and the plane lands tail first. It then falls apart by design. Operators just need to replace the battery and snap the unit together before launching it again. Pairs of Raven B s often are used to provide continuous coverage with the second launched just before the first exits its area of operation. Batteries can be easily recharged from a Humvee s battery. The control system utilizes a digital communication system supporting more than 40 channels for control, audio, and video transmissions. This is significantly more than the four channels available with the analog system used before. Digital also handles encryption and Internet Protocol (IP) traffic, making the aircraft a wireless access point. It makes handoff easier as well, allowing an aircraft to fly from one operator to another. The receiver can swap the battery and send the UAV back to its source within minutes. The Raven B uses a rechargeable (60 to 90 minutes) or single-use (80 to 110 minutes) battery. It powers the motor, the control system, and the payload. The UAV also has a line-of-sight range of 10 km. Its approximately 500-ft ceiling is limited more by the camera optics and resolution. The camera presents a slightly smaller view of what is captured, allowing the system to provide digital optical stabilization as well as pan and zoom. It has been used at locations over 10,000 feet above sea level, including Afghanistan. The on-board mission control system is designed for RC and fully autonomous operation, which enables operators to specify operation using waypoints specified on maps displayed on a laptop or GCU. The GCU can capture images, while a laptop is normally used to store streaming video. The Raven B has been designed for rugged environments, so operators can configure or store units while wearing gloves. Training for the Raven B runs about two weeks, but operators are working with a flying plane the first day. Much of the training addresses issues such as safety, maintenance, and proper use. Operators can fly the UAV in real time, though autonomous waypoint operation is used more often so operators can concentrate on the information the UAV can capture. TACTICAL VTOL Gas-powered UAVs tend to be larger and provide a wider range of operating parameters. The Aurora Flight Sciences GoldenEye 80 advanced ducted fan VTOL (vertical takeoff and landing) (Fig. 5) weighs around 150 lb with a 30-lb payload. It stands 65-in. high and can hover for three hours. Its typical mission duration is eight hours. Designed for military use, its engine can run on Jet-A, JP-8, and aviation gasoline. It is a derivative of the U.S. Army s Shadow engine. The GoldenEye 80 has internal and external payload support. It can handle a range of stabilized eletro-optical and infrared cameras. Its two main internal systems are the flight control system and the mission management system. A 40-MHz microcontroller powers the flight control system. It has access to the GPS and INS (inertial) guidance system. The microcontroller handles the engine and the thrust vectoring system. It also performs real-time stabilization. A system-wide Ethernet network connects it to the mission management system. The network provides payload nodes. The mission control processor, which is a 1-GHz Power PC, is a bit heftier. The system provides room for growth and allows more Page 2 of 10
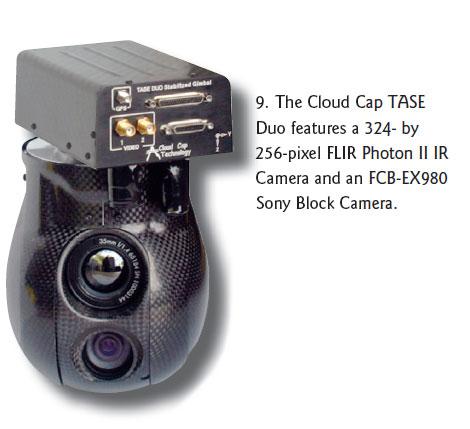
3 sophisticated autonomous operation. It also provides behaviors designed to simplify the user interface. It will eventually permit features such as collision avoidance. The system can already handle loss of communication with the ground station using contingency plans based on the current state of the mission. External payloads can be mounted on a gimbaled mount. Its heavier payload capacity allows a range of devices to employed from cameras to laser imaging detection and ranging (LIDAR). GET UP AND FLYING FASTER Many UAVs are built from the ground up, including their electronic flight control system and mission management system. Cloud Cap Technology aims to deliver this combination in its generic Piccolo system, which can be used on existing or new aircraft. The company also provides stabilized camera systems and inertial measurement sensors. The Piccolo II (Fig. 6) weighs only 226 g, including a 900-MHz radio transceiver. The compact box is just 142 mm by 46 mm by 62 mm. The Piccolo SL is even smaller at 130 mm by 59 mm by 19 mm. The Piccolo II runs off of a 8- to 20-V dc power source and consumes only 4 W. The Piccolo s Freescale MPC555 microcontroller supports five serial ports normally used with payload modules, 16 GPIOs, and four 10-bit analog-to-digital converter (ADC) inputs. It also supports controller-area networking (CAN). An inertial navigation system (INS) and GPS positioning system are part of the package as well. It is designed to hook directly into air sensors mounted on the exterior of the aircraft being controlled. The software handles RC operation as well as semi-autonomous support. The system provides stability, smooth movements, and full autonomous operation. Failsafe operation accounts for the quality of the remote communication link, enabling the system to switch to fully autonomous mode and potentially a different aspect of the mission plan if the communication link is lost. Likewise, it can easily switch between GPS and INS positioning if all necessary GPS signals are lost. The system also has terrain awareness using data such as shuttle radar terrain map (SRTM) to provide collision avoidance. The Piccolo is programmed using the Piccolo Command Center (PCC) (Fig. 7), which can control multiple aircraft. It is used for a range of chores from the initial design configuration based on an aircraft s performance characteristics and its interface to the Piccolo. Cloud Cap developed its own programming language to facilitate customization. Most users take advantage of the PCC using a graphical interface for mission planning, simulation, execution, and analysis. The Piccolo systems support a range of aircraft configurations including helicopters. Experiments are even underway testing these systems on watercraft. Software options include laser altimeter autoland support, differential global positioning system (DGPS) autoland support, and DGPS and moving net recovery in addition to VTOL vehicle support. The system is so robust and easy to configure that new aircraft have been up and running within a day. The Piccolo is used in the Optimum Solutions Condor 300 UAV (Fig. 8). The airframe is constructed using advanced composite materials such as carbon fiber embedded in epoxy resin. The wing and stabilizer sections are bonded together into a lightweight structure. This T-tail aircraft uses a pair of electric motors to drive the propellers. Each motor has a matching gear box designed to provide high torque at low RPMs. A custom-built polymer lithium-ion battery package supplies the power. The system is designed for modularity and redundancy. The battery package has a magazine-style carrier for quick replacement. There are two electrical supply systems within the aircraft so each motor, control surface, and actuator has two power supplies and control subsystems. The Condor 300 is designed to collapse into a compact package that can be assembled and ready to fly in 10 minutes by two people. The turnaround time on the ground with battery replacement is two minutes. Using the Piccolo, the system can handle autonomous takeoff and landing using a laser-based altimeter. The aircraft has a maximum speed or 125 km/h with an average cruising speed of 90 km/h. It has a wingspan of 3.22 m and a ground weight of 18 kg. Flight time is up to four hours. The Condor 300 also can handle a 6-kg payload, which typically is a Cloud Cap TASE Duo (Fig. 9). The Cloud Cap TASE Duo includes a pair of cameras in a 5-in. diameter turret. They feature a 324- by 256-pixel FLIR Photon II IR Camera and an FCB-EX980 Sony Block Camera. The system s gimbal stabilized package includes GPS and INS support, making it very similar to the Piccolo in functionality. Given the required functionality for the TASE Duo, it isn t too much of a surprise that Cloud Cap came up with the TASE LT (Fig. 10). This system combines the Piccolo s aircraft control with the camera so the control portion is essentially free in terms of space, weight, and power consumption. It employs the same 13-state Kalman filter and neural network as the other Piccolo systems. The single package also makes system design easier. Page 3 of 10

4 LARGE PAYLOADS Northrop Grumman s Global Hawk is a 32,250-lb unmanned aircraft with a ft wingspan and a payload of 3000 lb. Its Allison Rolls- Royce AE3007H turbofan engine enables it to cruise at more than 400 mph. It has a ceiling in excess of 65,000 feet and can stay up for 36 hours. Such a large craft allows more sophisticated systems to be employed for UAV control as well as mission management. The Global Hawk is designed to support survivability enhancements such as Raytheon s AN/ALR-89 self-protection suite, which includes the AN/AVR-3 Laser Warning System, the AN/APR-49 Radar Warning Receiver, and a radar jamming system. The UAV can also employ the ALE-50 towed decoy. Some of the rugged subsystems within the Global Hawk come from Curtiss-Wright Controls Embedded Computing, including the Advanced Mission Management System (AMMS), Integrated Mission Management Computer (IMMC), and Sensor Management Unit (SMU) subsystems (Fig. 11). An IPv6 Gigabit Ethernet network provides the communication between various modules. The AMMS is the hub for the payload suite with support for Gigabit Ethernet and Fibre Channel. The VPX-based system starts with a 6U VPX6-185 single-board computer (SBC). The SBC runs a dual-core, 1.3-GHz Freescale 8641 Power PC processor. The AMMS can handle up to 21 boards with the base system normally taking up five to 12 slots. The other slots are typically filled with other support hardware such as power supplies and solid-state hard disks. The IMMC handles flight control and flight-critical chores. It is isolated from other subsystems because of its more stringent qualification requirements. Whereas the AMMS uses more multicore processors, the IMMC uses single-core processors running critical real-time control applications. The SMU manages sensors and payloads. It also connects the sensor suite with satellite and ground communications systems. The SMU handles legacy interfaces such as 1553 and RS-232 serial ports. Its DSP subsystem allows refinement of sensor data. The subsystem is housed in a rugged aluminum chassis. All of the systems are linked via Gigabit Ethernet, providing IP-based communication links between applications. This network is additionally linked via radio to ground control systems such as the Ground Sensor Management Unit (GSMU) also provided by Curtiss- Wright. The trend is toward more open, standards-based interfaces for easier connection of new and different subsytems and payloads. Page 4 of 10


5 Page 5 of 10


6 Page 6 of 10


7 Page 7 of 10
Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007
 Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007 UAV Sergio Esteban sesteban@us.es 1 Advanced Technologies and Engineering Co (Pty) Ltd (ATE). Vulture Production: Production
Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007 UAV Sergio Esteban sesteban@us.es 1 Advanced Technologies and Engineering Co (Pty) Ltd (ATE). Vulture Production: Production
In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led
 was founded by current company President Alexander Zakharov, since then he has led") A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
DRONE & UAV.
 www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
SURVEYOR-H. Technical Data. Max speed 120 km/h. Engine power 7.2 hp. Powerplant Modified Zenoah G29E. Fuel tank volume 3.6 l
 rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Electric Penguin s philosophy:
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
AT-10 Electric/HF Hybrid VTOL UAS
 AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
PENGUIN B UAV PLATFORM
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v.0 PENGUIN B UAV PLATFORM Penguin B platform ready for payload and autopilot integration 0+ hour endurance Fuel injected engine option Up to 10 kg payload capacity
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v.0 PENGUIN B UAV PLATFORM Penguin B platform ready for payload and autopilot integration 0+ hour endurance Fuel injected engine option Up to 10 kg payload capacity
A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere.
 Key Features A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere. Supported Vehicle Types s Multirotors Fixed-wings Bi-, tri- and quadcopter tailsitters, quadplanes and tiltrotors.
Key Features A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere. Supported Vehicle Types s Multirotors Fixed-wings Bi-, tri- and quadcopter tailsitters, quadplanes and tiltrotors.
THE FALCON REDUNDANCY HIGH WIND TOLERANCE BEST USED FOR SURVEILLANCE & SECURITY DELIVERY & TRANSPORT
 THE FALCON REDUNDANCY HIGH WIND TOLERANCE The Falcon's new air frame and motor configuration is the new best in its class of light payloads with flight times of up to 50 minutes. This makes the Falcon
THE FALCON REDUNDANCY HIGH WIND TOLERANCE The Falcon's new air frame and motor configuration is the new best in its class of light payloads with flight times of up to 50 minutes. This makes the Falcon
FLYEYE Unmanned Aerial System
 FLYEYE Unmanned Aerial System FLYEYE Unmanned Aerial System About Flytronic FLYTRONIC is a dynamic modern engineering company focussed on developing Unmanned Aerial Systems to provide observation and reconnaissance
FLYEYE Unmanned Aerial System FLYEYE Unmanned Aerial System About Flytronic FLYTRONIC is a dynamic modern engineering company focussed on developing Unmanned Aerial Systems to provide observation and reconnaissance
BY HOEYCOMB AEROSPACE TECHNOLOGIES. HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV
 BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
Length Height Rotor Diameter Tail Rotor Diameter..12. Tail Boom Length Width
 2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
2.1 Air Vehicle 2.1.1 Vehicle General Description The PA-01 Vapor S-UAV is a rotary wing small unmanned aerial vehicle. The AV is powered by an outrunner 8.5hp class brushless electric motor. The airframe
Content. Introduction. Technology. Type of unmanned vehicle. Past, Present, Future. Conclusion
 Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
PENGUIN C UAS OPERATIONS & MAINTENANCE TRAINING 20 HOURS FLIGHT ENDURANCE 100KM RANGE ITAR - FREE CREW OF TWO
 PENGUIN C UAS LONG ENDURANCE UNMANNED AERIAL SYSTEM 20 HOURS FLIGHT ENDURANCE OPERATIONS & MAINTENANCE TRAINING 100KM RANGE ITAR - FREE CREW OF TWO U AV FAC T O RY LT D., E U R O P E U AV FAC T O RY U
PENGUIN C UAS LONG ENDURANCE UNMANNED AERIAL SYSTEM 20 HOURS FLIGHT ENDURANCE OPERATIONS & MAINTENANCE TRAINING 100KM RANGE ITAR - FREE CREW OF TWO U AV FAC T O RY LT D., E U R O P E U AV FAC T O RY U
Palos Verdes High School 1
 Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
High aspect ratio for high endurance. Mechanical simplicity. Low empty weight. STOVL or STOL capability. And for the propulsion system:
 Idealized tilt-thrust (U) All of the UAV options that we've been able to analyze suffer from some deficiency. A diesel, fixed-wing UAV could possibly satisfy the range and endurance objectives, but integration
Idealized tilt-thrust (U) All of the UAV options that we've been able to analyze suffer from some deficiency. A diesel, fixed-wing UAV could possibly satisfy the range and endurance objectives, but integration
AeroVironment, Inc. Corporate Overview. Background
 AeroVironment, Inc. Corporate Overview Background AeroVironment (NASDAQ: AVAV) is a technology solutions provider at the intersection of future-defining capabilities that include robotics,, software analytics
AeroVironment, Inc. Corporate Overview Background AeroVironment (NASDAQ: AVAV) is a technology solutions provider at the intersection of future-defining capabilities that include robotics,, software analytics
Jay Gundlach AIAA EDUCATION SERIES. Manassas, Virginia. Joseph A. Schetz, Editor-in-Chief. Blacksburg, Virginia. Aurora Flight Sciences
 Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Design and Development of the UTSA Unmanned Aerial System ACE 1
 Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
UAV Drones. Team RamRod: Tyler Barry James Bohn Daniel Ramirez Hari Shrestha Arlo Swanson Garret Wilbanks
 UAV Drones Team RamRod: Tyler Barry James Bohn Daniel Ramirez Hari Shrestha Arlo Swanson Garret Wilbanks Outline Introduction History Technology and Applications Current Future Economics and Marketability
UAV Drones Team RamRod: Tyler Barry James Bohn Daniel Ramirez Hari Shrestha Arlo Swanson Garret Wilbanks Outline Introduction History Technology and Applications Current Future Economics and Marketability
Predator B: The Multi-Role UAV
 Predator B: The Multi-Role UAV June 2002 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated to average 1 hour per response,
Predator B: The Multi-Role UAV June 2002 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated to average 1 hour per response,
WingtraOne Technical Specifications
 WingtraOne Technical Specifications wingtra.com The all-in-one drone: large coverage, high resolution and accuracy WingtraOne Resolution Accuracy Coverage down to 0.7 cm/px (0.3 in/px) GSD down to 1 cm
WingtraOne Technical Specifications wingtra.com The all-in-one drone: large coverage, high resolution and accuracy WingtraOne Resolution Accuracy Coverage down to 0.7 cm/px (0.3 in/px) GSD down to 1 cm
DSSI UAV. Unmanned Aerial Vehicle. Research & Development Project
 UAV Unmanned Aerial Vehicle HISTORY AND SKILLS of Small UAV with electrically powered propeller Description of the solution: Airframe,electronics, 2 battery sets 1 spare Airframe, battery charger Transport
UAV Unmanned Aerial Vehicle HISTORY AND SKILLS of Small UAV with electrically powered propeller Description of the solution: Airframe,electronics, 2 battery sets 1 spare Airframe, battery charger Transport
THE KARANTANIA UNMANNED AERIAL SYSTEM
 THE KARANTANIA UNMANNED AERIAL SYSTEM ABSTRACT Tomaž Meze, Bogo Štempihar, Mihael Grom MIBO MODLI d.o.o. Čevica 6, SI 1370 Logatec, Slovenia tomi.meze@siol.net, info@mibojets.com Tone Magister University
THE KARANTANIA UNMANNED AERIAL SYSTEM ABSTRACT Tomaž Meze, Bogo Štempihar, Mihael Grom MIBO MODLI d.o.o. Čevica 6, SI 1370 Logatec, Slovenia tomi.meze@siol.net, info@mibojets.com Tone Magister University
How the V-22 Osprey Works
 How the V-22 Osprey Works It has long been a dream of aircraft designers to create an airplane that not only can fly long ranges at high speeds and carry heavy cargo, but can also take off, hover and land
How the V-22 Osprey Works It has long been a dream of aircraft designers to create an airplane that not only can fly long ranges at high speeds and carry heavy cargo, but can also take off, hover and land
Development of a Low Cost DIY UAV Mapping Platform
 Development of a Low Cost DIY UAV Mapping Platform James Parkes Tritan Survey CC, Engineering and Hydrographic Surveyors, Cape Town, South Africa +27 21 797 2081 - jamesp@tritan.co.za Abstract In the past
Development of a Low Cost DIY UAV Mapping Platform James Parkes Tritan Survey CC, Engineering and Hydrographic Surveyors, Cape Town, South Africa +27 21 797 2081 - jamesp@tritan.co.za Abstract In the past
THE ULTIMATE DRONE SOLUTION
 THE ULTIMATE DRONE SOLUTION LX-1 ECHELON LiDAR MULTIROTOR Brochure & Technical Specifications OVERVIEW The LX-1 Echelon is a professional-grade hexacopter equipped with a LiDAR sensing payload, and designed
THE ULTIMATE DRONE SOLUTION LX-1 ECHELON LiDAR MULTIROTOR Brochure & Technical Specifications OVERVIEW The LX-1 Echelon is a professional-grade hexacopter equipped with a LiDAR sensing payload, and designed
9/11/2018. UAS110 Intro to UAV Systems. UAS110 Intro to Unmanned Aerial Systems. Overview. Impetus. 3: UAV Classification
 UAS110 Intro to Unmanned Aerial Systems 2018 J. Sumey California University of PA rev. 9/11/18 Overview UAVs may be classified according to various metrics scale (size) method of lift generation range/endurance
UAS110 Intro to Unmanned Aerial Systems 2018 J. Sumey California University of PA rev. 9/11/18 Overview UAVs may be classified according to various metrics scale (size) method of lift generation range/endurance
2012 AUVSI SUAS Student Competition Journal Paper. Kansas State University Salina UAS Club. Prepared By: Mark Wilson Coby Tenpenny Colby Walter
 2012 AUVSI SUAS Student Competition Journal Paper Kansas State University Salina UAS Club Prepared By: Mark Wilson Coby Tenpenny Colby Walter May 14, 2012 Willie Abstract The Willie Unmanned Aerial System
2012 AUVSI SUAS Student Competition Journal Paper Kansas State University Salina UAS Club Prepared By: Mark Wilson Coby Tenpenny Colby Walter May 14, 2012 Willie Abstract The Willie Unmanned Aerial System
Aeronautical Systems Center
 Aeronautical Systems Center Global Hawk Program Overview Michael Johnston 303 AESG/LG DSN: 787-4047 Comm: 937-255-4047 michael.johnston@wpafb.af.mil RQ-4A Global Hawk System Global Hawk: High-altitude,
Aeronautical Systems Center Global Hawk Program Overview Michael Johnston 303 AESG/LG DSN: 787-4047 Comm: 937-255-4047 michael.johnston@wpafb.af.mil RQ-4A Global Hawk System Global Hawk: High-altitude,
Mercury VTOL suas Testing and Measurement Plan
 Mercury VTOL suas Testing and Measurement Plan Introduction Mercury is a small VTOL (Vertical Take-Off and Landing) aircraft that is building off of a quadrotor design. The end goal of the project is for
Mercury VTOL suas Testing and Measurement Plan Introduction Mercury is a small VTOL (Vertical Take-Off and Landing) aircraft that is building off of a quadrotor design. The end goal of the project is for
Physical Layer Switch
 Technology White Paper Physical Layer Switch Simultaneous Processing and Recording of High-speed Sensor Data Introduction The Sensor Application Environment Surveillance and intelligence gathering applications
Technology White Paper Physical Layer Switch Simultaneous Processing and Recording of High-speed Sensor Data Introduction The Sensor Application Environment Surveillance and intelligence gathering applications
UAVs UK - factsheet. The Variants. Desert Hawk
 FS 70 UAVs UK - factsheet The Variants Desert Hawk Battery powered and hand launched. Can fly for around one hour at 200-800 feet within a 15km radius of its ground control system. Used for battlefield
FS 70 UAVs UK - factsheet The Variants Desert Hawk Battery powered and hand launched. Can fly for around one hour at 200-800 feet within a 15km radius of its ground control system. Used for battlefield
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Development, Certification, and Flight Testing of an OPA for UAS FTT Development and Training at NTPS
 Development, Certification, and Flight Testing of an OPA for UAS FTT Development and Training at NTPS 2013 SFTE/SETP Flight Test Symposium Evolution of Flight Testing from Manned Vehicles to UAVs 1 Overview
Development, Certification, and Flight Testing of an OPA for UAS FTT Development and Training at NTPS 2013 SFTE/SETP Flight Test Symposium Evolution of Flight Testing from Manned Vehicles to UAVs 1 Overview
University of Central Florida Entry for the 2013 AUVSI Foundation s International Aerial Robotics Competition
 University of Central Florida Entry for the 2013 AUVSI Foundation s International Aerial Robotics Competition Logan Camacho University of Central Florida, Aerospace Engineering Karl Ravago University of
University of Central Florida Entry for the 2013 AUVSI Foundation s International Aerial Robotics Competition Logan Camacho University of Central Florida, Aerospace Engineering Karl Ravago University of
Innovating the future of disaster relief
 Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
suas in CAP Delaware Wing HQ, Civil Air Patrol Development of small Unmanned Aerial Systems
 Delaware Wing HQ, Civil Air Patrol suas in CAP Development of small Unmanned Aerial Systems Advent of the suas Small Unmanned Aerial Systems have become very common recently Sophisticated microprocessors
Delaware Wing HQ, Civil Air Patrol suas in CAP Development of small Unmanned Aerial Systems Advent of the suas Small Unmanned Aerial Systems have become very common recently Sophisticated microprocessors
Overview. Mission Overview Payload and Subsystems Rocket and Subsystems Management
 MIT ROCKET TEAM Overview Mission Overview Payload and Subsystems Rocket and Subsystems Management Purpose and Mission Statement Our Mission: Use a rocket to rapidly deploy a UAV capable of completing search
MIT ROCKET TEAM Overview Mission Overview Payload and Subsystems Rocket and Subsystems Management Purpose and Mission Statement Our Mission: Use a rocket to rapidly deploy a UAV capable of completing search
4.5 HOURS ENDURANCE 21 KG MAX. TAKE-OFF WEIGHT IP-56 WATER/DUST RESISTANT FULLY AUTOMATIC 5 KG PAYLOAD IMC-SHIELDED +50 KM RANGE WITH HD VIDEO
 HEF32 UAV System 4.5 HOURS ENDURANCE 21 KG MAX. TAKE-OFF WEIGHT IP-56 WATER/DUST RESISTANT FULLY AUTOMATIC 5 KG PAYLOAD IMC-SHIELDED +50 KM RANGE WITH HD VIDEO CERTIFIED OPERATIONS MANUAL PART 145 MAINTENANCE
HEF32 UAV System 4.5 HOURS ENDURANCE 21 KG MAX. TAKE-OFF WEIGHT IP-56 WATER/DUST RESISTANT FULLY AUTOMATIC 5 KG PAYLOAD IMC-SHIELDED +50 KM RANGE WITH HD VIDEO CERTIFIED OPERATIONS MANUAL PART 145 MAINTENANCE
Micro Craft Ducted Air Vehicle. Larry Lipera istar Program Manager Micro Craft Inc., San Diego, CA
 Micro Craft Ducted Air Vehicle Larry Lipera istar Program Manager (llipera@microcraft.com) Micro Craft Inc., San Diego, CA Abstract Recent military and commercial interest in Unmanned Air Vehicles has
Micro Craft Ducted Air Vehicle Larry Lipera istar Program Manager (llipera@microcraft.com) Micro Craft Inc., San Diego, CA Abstract Recent military and commercial interest in Unmanned Air Vehicles has
The following slideshow and talk were presented at the Uber Elevate Summit on April 25 th, The text included here is an approximate transcript
 The following slideshow and talk were presented at the Uber Elevate Summit on April 25 th, 2017. The text included here is an approximate transcript of the speech given by Jay Carter, founder and CEO of
The following slideshow and talk were presented at the Uber Elevate Summit on April 25 th, 2017. The text included here is an approximate transcript of the speech given by Jay Carter, founder and CEO of
HEF 32 UNMANNED HELICOPTER SYSTEM
 HEF 32 UNMANNED HELICOPTER SYSTEM > 4 HOURS ENDURANCE 50 KM LINE OF SIGHT RANGE IP-67 WATER/DUST RESISTANT 5 KG PAYLOAD 21.5 KG MAX. TAKE-OFF WEIGHT EMI-SHIELDED ITAR FREE FULLY AUTOMATIC OPERATION ENCRYPTED
HEF 32 UNMANNED HELICOPTER SYSTEM > 4 HOURS ENDURANCE 50 KM LINE OF SIGHT RANGE IP-67 WATER/DUST RESISTANT 5 KG PAYLOAD 21.5 KG MAX. TAKE-OFF WEIGHT EMI-SHIELDED ITAR FREE FULLY AUTOMATIC OPERATION ENCRYPTED
UNITED STATES MILITARY AIRCRAFT by Jos Heyman
 Last updated : 1 January 2016 UNITED STATES MILITARY AIRCRAFT by Jos Heyman Tri-service Q = Drone Q-1 General Atomics Predator span: 48 9, 14.94 m length: 26 8, 8.23 m engines: 1 Rotax 912 max. speed:
Last updated : 1 January 2016 UNITED STATES MILITARY AIRCRAFT by Jos Heyman Tri-service Q = Drone Q-1 General Atomics Predator span: 48 9, 14.94 m length: 26 8, 8.23 m engines: 1 Rotax 912 max. speed:
A Small, Manned Aircraft as a Testbed for Radar Sensor Development
 A Small, Manned Aircraft as a Testbed for Radar Sensor Development Matthew C. Edwards a, Evan C. Zaugg, a, David G. Long a, Richard Christiansen a and Alex Margulis b a Brigham Young University, 459 CB,
A Small, Manned Aircraft as a Testbed for Radar Sensor Development Matthew C. Edwards a, Evan C. Zaugg, a, David G. Long a, Richard Christiansen a and Alex Margulis b a Brigham Young University, 459 CB,
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition
 Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
BAYLOR UNIVERSITY DEPARTMENT OF ENGINEERING. EGR 4347 Analysis and Design of Propulsion Systems Fall 2002 ASSIGNMENT GUIDELINES
 BAYLOR UNIVERSITY DEPARTMENT OF ENGINEERING EGR 4347 Analysis and Design of Propulsion Systems Fall 2002 Design Project I Dr Van Treuren 100 points ASSIGNMENT GUIDELINES For this assignment, you may work
BAYLOR UNIVERSITY DEPARTMENT OF ENGINEERING EGR 4347 Analysis and Design of Propulsion Systems Fall 2002 Design Project I Dr Van Treuren 100 points ASSIGNMENT GUIDELINES For this assignment, you may work
2015 AUVSI UAS Competition Journal Paper
 2015 AUVSI UAS Competition Journal Paper Abstract We are the Unmanned Aerial Systems (UAS) team from the South Dakota School of Mines and Technology (SDSM&T). We have built an unmanned aerial vehicle (UAV)
2015 AUVSI UAS Competition Journal Paper Abstract We are the Unmanned Aerial Systems (UAS) team from the South Dakota School of Mines and Technology (SDSM&T). We have built an unmanned aerial vehicle (UAV)
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials. Ripley Valley Rural Fire Brigade - August 2010
 Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
DRONE PRODUCTS LINEUP
 DATA S H E E T DRONE PRODUCTS LINEUP COMPANY OVERVIEW Ainstein is the cutting-edge UAV/UAS radar sensor and advanced flight controller provider for autonomous and beyond visual line of sight (BVLOS) flight
DATA S H E E T DRONE PRODUCTS LINEUP COMPANY OVERVIEW Ainstein is the cutting-edge UAV/UAS radar sensor and advanced flight controller provider for autonomous and beyond visual line of sight (BVLOS) flight
Chapter 8. Example Point Design - Suppression of Enemy Air Defenses
 Chapter 8 Example Point Design - Suppression of Enemy Air Defenses In order to quantify the sensitivity of UAVs to potential technological advances and to define promising UAVs as precisely as possible,
Chapter 8 Example Point Design - Suppression of Enemy Air Defenses In order to quantify the sensitivity of UAVs to potential technological advances and to define promising UAVs as precisely as possible,
for Unmanned Aircraft
 Damage age Tolerant Flight Control o Systems s for Unmanned Aircraft September 17, 28 Vlad Gavrilets, Ph.D. Approved for public release, distribution unlimited Rockwell Collins Control Technologies - Formerly
Damage age Tolerant Flight Control o Systems s for Unmanned Aircraft September 17, 28 Vlad Gavrilets, Ph.D. Approved for public release, distribution unlimited Rockwell Collins Control Technologies - Formerly
Unmanned Systems DEVELOPED FOR AIRBORNE, LAND & MARITIME APPLICATIONS
 Unmanned Systems DEVELOPED FOR AIRBORNE, LAND & MARITIME APPLICATIONS OUR CUSTOMERS ARE OUR CREDENTIALS TCOM 17m Aerostat with Star SAFIRE HD TAGS outfitted with TALON AeroVironment RQ-11 Raven with Photon
Unmanned Systems DEVELOPED FOR AIRBORNE, LAND & MARITIME APPLICATIONS OUR CUSTOMERS ARE OUR CREDENTIALS TCOM 17m Aerostat with Star SAFIRE HD TAGS outfitted with TALON AeroVironment RQ-11 Raven with Photon
ELECTRICAL SYSTEMS AIAA TEAM 1 VT AIAA TEAM 1 1
 ELECTRICAL SYSTEMS AIAA TEAM 1 VT AIAA TEAM 1 1 Electrical Systems in Aircraft Avionics Hydraulics Environmentalcontrol Lighting Subsystems VT AIAA TEAM 1 2 Electrical System Composition Batteries Alternators/Generators
ELECTRICAL SYSTEMS AIAA TEAM 1 VT AIAA TEAM 1 1 Electrical Systems in Aircraft Avionics Hydraulics Environmentalcontrol Lighting Subsystems VT AIAA TEAM 1 2 Electrical System Composition Batteries Alternators/Generators
Investigative Technologies and Techniques
 Investigative Technologies and Techniques Using Drones In Accident Investigation (Aerial Photography) Drone used in accident investigation Technical specifications and performance Flat 8 motor configuration
Investigative Technologies and Techniques Using Drones In Accident Investigation (Aerial Photography) Drone used in accident investigation Technical specifications and performance Flat 8 motor configuration
The 22M Class Aerostat: Increased Capabilities for the Small Tethered Aerostat Surveillance System
 11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, including the AIA 20-22 September 2011, Virginia Beach, VA AIAA 2011-7069 The 22M Class Aerostat: Increased Capabilities for
11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, including the AIA 20-22 September 2011, Virginia Beach, VA AIAA 2011-7069 The 22M Class Aerostat: Increased Capabilities for
AERO. Meet the Aero. Congratulations on your purchase of an Aero!
 AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
ROBUST AIRFRAME FOR UAV FLIGHT TESTING FOR SALE!
 ROBUST AIRFRAME FOR UAV FLIGHT TESTING FOR SALE! My team specializes in fabricating airframes that s appropriate for testing unmanned aerial vehicle components. Our airframes are made of hybrid composite
ROBUST AIRFRAME FOR UAV FLIGHT TESTING FOR SALE! My team specializes in fabricating airframes that s appropriate for testing unmanned aerial vehicle components. Our airframes are made of hybrid composite
CENTAUR OPTIONALLY-PILOTED AIRCRAFT ULTIMATE FLEXIBILITY FOR AIRBORNE SENSING
 CENTAUR OPTIONALLY-PILOTED AIRCRAFT ULTIMATE FLEXIBILITY FOR AIRBORNE SENSING CENTAUR A NEW LEVEL OF OPERATIONAL FLEXIBILITY Aurora Flight Sciences Centaur combines the best of manned and unmanned surveillance
CENTAUR OPTIONALLY-PILOTED AIRCRAFT ULTIMATE FLEXIBILITY FOR AIRBORNE SENSING CENTAUR A NEW LEVEL OF OPERATIONAL FLEXIBILITY Aurora Flight Sciences Centaur combines the best of manned and unmanned surveillance
Technology for the Future of Vertical Lift
 Presented to: Italian Vertical Lift Community Technology for the Future of Vertical Lift Approved for public release; distribution unlimited. Review completed by the AMRDEC Public Affairs Office 15 Nov
Presented to: Italian Vertical Lift Community Technology for the Future of Vertical Lift Approved for public release; distribution unlimited. Review completed by the AMRDEC Public Affairs Office 15 Nov
Diamond Aircraft Group
 Diamond Aircraft Group Johannes A. Frauenberger Accountable Manager Diamond Aircraft Austria Hanoi 2014 Diamond Aircraft Industries Diamond Aircraft Industries Canada, Ontario Diamond Aircraft Industries
Diamond Aircraft Group Johannes A. Frauenberger Accountable Manager Diamond Aircraft Austria Hanoi 2014 Diamond Aircraft Industries Diamond Aircraft Industries Canada, Ontario Diamond Aircraft Industries
aviation week A New Approach To VTOL Page 36 Secure Collaboration On The Internet THE FIGHT OVER F-22 & SPACE TECHNOLOGY Page 53 Page 44
 THE FIGHT OVER F-22 aviation $6.00 JULY 20, 2009 week & SPACE TECHNOLOGY A New Approach To VTOL Page 36 Secure Collaboration On The Internet Page 44 Page 53 AviationWeek.com/awst Page 1 of 1 Print This
THE FIGHT OVER F-22 aviation $6.00 JULY 20, 2009 week & SPACE TECHNOLOGY A New Approach To VTOL Page 36 Secure Collaboration On The Internet Page 44 Page 53 AviationWeek.com/awst Page 1 of 1 Print This
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
UNCLASSIFIED R-1 ITEM NOMENCLATURE. FY 2014 FY 2014 OCO ## Total FY 2015 FY 2016 FY 2017 FY 2018
 COST ($ in Millions) Years FY 2012 FY 2013 # ## FY 2015 FY 2016 FY 2017 FY 2018 To Program Element 335.638 51.642 9.122 3.326-3.326 1.396 0.930 0.279 0.284 0.000 402.617 675143: Predator 335.638 51.642
COST ($ in Millions) Years FY 2012 FY 2013 # ## FY 2015 FY 2016 FY 2017 FY 2018 To Program Element 335.638 51.642 9.122 3.326-3.326 1.396 0.930 0.279 0.284 0.000 402.617 675143: Predator 335.638 51.642
Development of an Autonomous Aerial Reconnaissance Platform at Virginia Tech
 Development of an Autonomous Aerial Reconnaissance Platform at Virginia Tech Gregg Vonder Reith, Ken Meidenbauer, Imraan Faruque, Chris Sharkey Jared Cooper, Shane Barnett, Dr. Charles Reinholtz Department
Development of an Autonomous Aerial Reconnaissance Platform at Virginia Tech Gregg Vonder Reith, Ken Meidenbauer, Imraan Faruque, Chris Sharkey Jared Cooper, Shane Barnett, Dr. Charles Reinholtz Department
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July ISSN BY B.MADHAN KUMAR
 International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 485 FLYING HOVER BIKE, A SMALL AERIAL VEHICLE FOR COMMERCIAL OR. SURVEYING PURPOSES BY B.MADHAN KUMAR Department
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 485 FLYING HOVER BIKE, A SMALL AERIAL VEHICLE FOR COMMERCIAL OR. SURVEYING PURPOSES BY B.MADHAN KUMAR Department
Test like you Train Train like you Fight
 War-Winning Winning Capabilities On Time, On Cost Test like you Train Train like you Fight How Today s s Complexity Drives Future Range Requirements Major General David J. Eichhorn AFFTC Commander This
War-Winning Winning Capabilities On Time, On Cost Test like you Train Train like you Fight How Today s s Complexity Drives Future Range Requirements Major General David J. Eichhorn AFFTC Commander This
AERO. Meet the Aero. Congratulations on your purchase of an Aero!
 AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
Predator ACTD. Presentation To NDIA IOT&E
 Predator ACTD Presentation To NDIA IOT&E Tier 2 ACTD Highlights Program run by Joint Program Office (JPO) GOAL: rapid deployment of long endurance medium unmanned ISR platform Performance objectives: Over
Predator ACTD Presentation To NDIA IOT&E Tier 2 ACTD Highlights Program run by Joint Program Office (JPO) GOAL: rapid deployment of long endurance medium unmanned ISR platform Performance objectives: Over
MINI-REIS A FAMILY OF MULTIFUNCTIONAL UNMANNED LIGHT JET AIRCRAFTS
 National Aerospace University Kharkiv Aviation Institute KhAI Public Joint Stock Company "Kyiv Radio Plant" Inter-Industry Scientific & Research Institute of the Problems of Aircraft Flight Mode Physical
National Aerospace University Kharkiv Aviation Institute KhAI Public Joint Stock Company "Kyiv Radio Plant" Inter-Industry Scientific & Research Institute of the Problems of Aircraft Flight Mode Physical
MLT Surveillance Platform
 MLT Surveillance Platform MLT 310F Configuration The SuperDroid Robots MLT 310F Surveillance Robot is a small rugged robot that can easily fit in backpack or carrying case. The robot weighs less than 8lbs.
MLT Surveillance Platform MLT 310F Configuration The SuperDroid Robots MLT 310F Surveillance Robot is a small rugged robot that can easily fit in backpack or carrying case. The robot weighs less than 8lbs.
Design and Testing of the Spartan USV Mine Warfare Module
 Design and Testing of the Spartan USV Mine Warfare Module 14 June, 2005 Dr. Robert Mons Sr. Advisory Engineer Northrop Grumman Corporation Acknowledgement This work was sponsored by The Naval Undersea
Design and Testing of the Spartan USV Mine Warfare Module 14 June, 2005 Dr. Robert Mons Sr. Advisory Engineer Northrop Grumman Corporation Acknowledgement This work was sponsored by The Naval Undersea
Unmanned Aerial Vehicle Design, Development, and Implementation
 Unmanned Aerial Vehicle Design, Development, and Implementation Faculty Advisor Dr. David Schmidt Team Members Patrick Herklotz, Shane Kirkbride, Mike Kopps, Mark Kraska, John Ordeman, Erica Rygg, Matt
Unmanned Aerial Vehicle Design, Development, and Implementation Faculty Advisor Dr. David Schmidt Team Members Patrick Herklotz, Shane Kirkbride, Mike Kopps, Mark Kraska, John Ordeman, Erica Rygg, Matt
3 MODES FLIGHT YOUR EASY-TO-USE AERIAL PHOTO AND VIDEO ASSISTANT AERIAL IMAGES * CAPTURE STUNNING. shown
 shown YOUR EASY-TO-USE AERIAL PHOTO AND VIDEO ASSISTANT Āton makes it easy for everyone to enjoy capturing stunning aerial footage. With built-in features such as Auto-Take off and Return To Home, Āton
shown YOUR EASY-TO-USE AERIAL PHOTO AND VIDEO ASSISTANT Āton makes it easy for everyone to enjoy capturing stunning aerial footage. With built-in features such as Auto-Take off and Return To Home, Āton
The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production
 AUVSI Unmanned Systems North America 2013 Conference August 14, 2013 The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com
AUVSI Unmanned Systems North America 2013 Conference August 14, 2013 The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com
Seventh Framework Programme THEME: AAT Breakthrough and emerging technologies Call: FP7-AAT-2012-RTD-L0 AGEN
 Seventh Framework Programme THEME: AAT.2012.6.3-1. Breakthrough and emerging technologies Call: FP7-AAT-2012-RTD-L0 AGEN Atomic Gyroscope for Enhanced Navigation Grant agreement no.: 322466 Publishable
Seventh Framework Programme THEME: AAT.2012.6.3-1. Breakthrough and emerging technologies Call: FP7-AAT-2012-RTD-L0 AGEN Atomic Gyroscope for Enhanced Navigation Grant agreement no.: 322466 Publishable
PAC 750XL PAC 750XL PAC-750XL
 PAC 750XL The PAC 750XL combines a short take off and landing performance with a large load carrying capability. The PAC 750XL is a distinctive type. Its design philosophy is reflected in the aircraft's
PAC 750XL The PAC 750XL combines a short take off and landing performance with a large load carrying capability. The PAC 750XL is a distinctive type. Its design philosophy is reflected in the aircraft's
Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation
 Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation A cooperative study between the Lower Brule Sioux Tribe s Environmental Protection Office and the U.S. Geological Survey, with assistance
Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation A cooperative study between the Lower Brule Sioux Tribe s Environmental Protection Office and the U.S. Geological Survey, with assistance
Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles
 Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles Stuart Boland Derek Keen 1 Justin Nelson Brian Taylor Nick Wagner Dr. Thomas Bradley 47 th AIAA/ASME/SAE/ASEE JPC Outline
Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles Stuart Boland Derek Keen 1 Justin Nelson Brian Taylor Nick Wagner Dr. Thomas Bradley 47 th AIAA/ASME/SAE/ASEE JPC Outline
Small UAV A French MoD perspective and planning
 Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
Small UAV A French MoD perspective and planning French ISTAR segmentation portable transportable infrastructure System volume Tactical Small UAV Contact Combat Helicopters (MTI) Fighter Aircrafts Land
TALON Robot Rechargeable Battery Audio Vehicle Dimensions Endurance Vehicle Communication Ports OCU Rechargeable Battery Endurance Optional Sensors
 TALON Vehicle Dimensions Height (arm stowed): 18 in. (42.7 cm) Height (arm extended): 52 in. (1.3m) Width: 22.5 in. (57.2 cm) Length: 34 in. (86.4 cm) Horizontal reach: 52 in. (1.3m) Below grade reach:
TALON Vehicle Dimensions Height (arm stowed): 18 in. (42.7 cm) Height (arm extended): 52 in. (1.3m) Width: 22.5 in. (57.2 cm) Length: 34 in. (86.4 cm) Horizontal reach: 52 in. (1.3m) Below grade reach:
Design and Implementation of an Autonomous Aerial Vehicle for Information Gathering in a Simulated Autonomous Environment
 Design and Implementation of an Autonomous Aerial Vehicle for Information Gathering in a Simulated Autonomous Environment Nathanael B. Edwards, Cynthia H.T. Edwards, Bradley J. Nelson, Joseph B. Tomlinson
Design and Implementation of an Autonomous Aerial Vehicle for Information Gathering in a Simulated Autonomous Environment Nathanael B. Edwards, Cynthia H.T. Edwards, Bradley J. Nelson, Joseph B. Tomlinson
Design and Development of South Dakota School of Mines and Technology s Aerial Robotic Reconnaissance System
 Design and Development of South Dakota School of Mines and Technology s Aerial Robotic Reconnaissance System Raunaq Bhushan, John Heiberger, Adam Helmers, Brian Jensen, Jacob Oursland, Mason Pluimer, Justin
Design and Development of South Dakota School of Mines and Technology s Aerial Robotic Reconnaissance System Raunaq Bhushan, John Heiberger, Adam Helmers, Brian Jensen, Jacob Oursland, Mason Pluimer, Justin
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business. Real-time Mechanism and System Simulation To Support Flight Simulators
 Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
Skycar Flight Control System Overview By Bruce Calkins August 14, 2012
 Skycar Flight Control System Overview By Bruce Calkins August 14, 2012 Introduction The Skycar is a new type of personal aircraft that will rely on directed thrust produced by its engines to enable various
Skycar Flight Control System Overview By Bruce Calkins August 14, 2012 Introduction The Skycar is a new type of personal aircraft that will rely on directed thrust produced by its engines to enable various
SEASPRITE. SH-2G Super MODERN MARITIME SOLUTION
 SEASPRITE SH-2G Super MODERN MARITIME SOLUTION Flexible The Kaman SH-2G Super Seasprite is the ideal multimission maritime helicopter. From anti-submarine warfare, to anti-surface warfare, over-the-horizon
SEASPRITE SH-2G Super MODERN MARITIME SOLUTION Flexible The Kaman SH-2G Super Seasprite is the ideal multimission maritime helicopter. From anti-submarine warfare, to anti-surface warfare, over-the-horizon
Production of Scientific and Production Center Unmanned Aircraft Systems and Technologies
 State Scientific Institution PHYSICAL-TECHNICAL INSTITUTE OF NATIONAL ACADEMY OF SCIENCES OF BELARUS Production of Scientific and Production Center Unmanned Aircraft Systems and Technologies Physical-Technical
State Scientific Institution PHYSICAL-TECHNICAL INSTITUTE OF NATIONAL ACADEMY OF SCIENCES OF BELARUS Production of Scientific and Production Center Unmanned Aircraft Systems and Technologies Physical-Technical
How to use the Multirotor Motor Performance Data Charts
 How to use the Multirotor Motor Performance Data Charts Here at Innov8tive Designs, we spend a lot of time testing all of the motors that we sell, and collect a large amount of data with a variety of propellers.
How to use the Multirotor Motor Performance Data Charts Here at Innov8tive Designs, we spend a lot of time testing all of the motors that we sell, and collect a large amount of data with a variety of propellers.
Design and Navigation of Flying Robots
 Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Autonomous Unmanned Aerial Systems 1. ABSTRACT
 1. ABSTRACT Zeppelin FC 26, a team formed in 2014, has undergone exponential growth. We have delved into diverse and challenging endeavors, ranging from systems integration to design and development of
1. ABSTRACT Zeppelin FC 26, a team formed in 2014, has undergone exponential growth. We have delved into diverse and challenging endeavors, ranging from systems integration to design and development of
MAVIC 2 PRO. Quick Start Guide V1.2
 MAVIC 2 PRO Quick Start Guide V1.2 Aircraft The DJI TM MAVIC TM 2 Pro features omnidirectional Vision Systems and Infrared Sensing Systems*, and a fully stabilized 3-axis gimbal with a 1" CMOS sensor camera
MAVIC 2 PRO Quick Start Guide V1.2 Aircraft The DJI TM MAVIC TM 2 Pro features omnidirectional Vision Systems and Infrared Sensing Systems*, and a fully stabilized 3-axis gimbal with a 1" CMOS sensor camera
European Workshop on Aircraft Design Education 2002
 From Specification & Design Layout to Control Law Development for Unmanned Aerial Vehicles Lessons Learned from Past Experience Zdobyslaw Goraj WUT, Poland Philip Ransom, Paul Wagstaff Kingston University,
From Specification & Design Layout to Control Law Development for Unmanned Aerial Vehicles Lessons Learned from Past Experience Zdobyslaw Goraj WUT, Poland Philip Ransom, Paul Wagstaff Kingston University,
Modeling, Structural & CFD Analysis and Optimization of UAV
 Modeling, Structural & CFD Analysis and Optimization of UAV Dr Lazaros Tsioraklidis Department of Unified Engineering InterFEA Engineering, Tantalou 7 Thessaloniki GREECE Next Generation tools for UAV
Modeling, Structural & CFD Analysis and Optimization of UAV Dr Lazaros Tsioraklidis Department of Unified Engineering InterFEA Engineering, Tantalou 7 Thessaloniki GREECE Next Generation tools for UAV
System Requirements Review
 AAE 451 Aircraft Senior Design Spring 2007 Continuous Area Coverage via Fixed-Wing Unmanned Aerial Systems System Requirements Review Team 3 Sumitero Darsono Charles Hagenbush Keith Higdon Seung-il Kim
AAE 451 Aircraft Senior Design Spring 2007 Continuous Area Coverage via Fixed-Wing Unmanned Aerial Systems System Requirements Review Team 3 Sumitero Darsono Charles Hagenbush Keith Higdon Seung-il Kim
Tactical Technology Office. Tactical Technology Office. Programs. DARPATech 2000 Dr. David Whelan Director Whelan Darpatech
 Programs DARPATech 2000 Dr. David Whelan Director dwhelan@darpa.mil Global Surveillance Land Systems Aerospace Systems Embedded Processing & Control Global Surveillance Objectives: Birth-to-Death Track
Programs DARPATech 2000 Dr. David Whelan Director dwhelan@darpa.mil Global Surveillance Land Systems Aerospace Systems Embedded Processing & Control Global Surveillance Objectives: Birth-to-Death Track
PERSONAL RECONNAISSANCE SYSTEM
 PERSONAL RECONNAISSANCE SYSTEM PD-100 PRS BLACK HORNET 2 The PD-100 Personal Reconnaissance System (PRS) including the Black Hornet 2 sensor is the World s smallest operational ISR-platform and has been
PERSONAL RECONNAISSANCE SYSTEM PD-100 PRS BLACK HORNET 2 The PD-100 Personal Reconnaissance System (PRS) including the Black Hornet 2 sensor is the World s smallest operational ISR-platform and has been