Perspectivas y avances del uso de UAV en AP. Bruno Basso
|
|
|
- Hector Pearson
- 6 years ago
- Views:
Transcription
1 Perspectivas y avances del uso de UAV en AP Bruno Basso
2 Outline of the presentation Remote and proximal sensing Pro and Cons of UAV Available UAVs Technologies Applications of UAVs in Precision Agriculture How to link UAV with crop modeling

3 Electromagnetic spectrum and spectral signatures of plants
. NDVI Reflects Red light (RED= 0.6-0.")
4 Healthy vegetation Absorbs Red light (RED= m) Reflects Near Infrared light (NIR= m). Vegetation in stress Absorbs Near Infrared light (NIR= m). NDVI Reflects Red light (RED= m)
5 NDVI Normalized Difference Vegetation Index NDVI = (NIR-RED) / (NIR+RED) NDVI increases linearly with LAI (for LAI < 3) LAI
6 Unmanned Aerial Vehicles According to AUVSI, following the FAA integration of UAVs into national airspace by Sept. 2015, UAVs will have $13.6 Billion impact on US economy (growth in precision agriculture) UAVs have many advantages but there is still work to do on them before they can be used directly by farmers
7 Pro and Cons of UAV UAV Pros: - Response time - Precision - Resolution - User Control Cons: - Stability ( if windy) - Costs (hardware) - Regulations (COA) - Training Satellite Satellite Pros: - Processing time - Established - Availability - Coverage Cons: - Cloud cover - Lacks user control - Return time - Costs (images)
8 Published Applications of UAVs in Agriculture Detection of crop/tree chlorosis (Zarco-Tejada & Berni, 2008) Detection of water spills in irrigated orchards (Zarco-Tejada & Berni, 2008) Estimating leaf carotenoid content in vineyards (Zarco-Tejada et al., 2013) Leaf Area Index (Berni & Zarco-Tejada, 2009; Zarco-Tejada & Berni, 2008) Water stress (Berni & Zarco-Tejada, 2009; Suárez, 2008; Suárez, 2009; Zarco-Tejada & Berni, 2008; Zarco-Tejada et al., 2012) Chlorophyll content (Berni & Zarco, 2009; Zarco-Tejada & Berni, 2008; Uto et al., 2013) Canopy temperature (Zarco-Tejada & Berni, 2008) Remote sensing of N stress levels (Teoh & Hassan, 2012; Tremblay et al., 2011) Weed Management (Torres-Sánchez et al. 2013)




9 Two Two Common UAV Airframes Fixed-wing Rotorcraft Vertical Takeoff and Landing (VTOL) Grenzdörffer et al., 2008 Nebiker et al., 2008 Berni & Zarco-Tejada, 2009 Nebiker et al., 2008



10 UAV model: mdr microdrones.com md is equipped with RGB digital video-camera, thermal camera, multispectral, laser scanner. Spatial resolution < 1 in (1-7cm) Payload 3 lbs, Flying time minute with 1 battery
11



")
12 Sensors Visible Multispectral Tetracam Sony, microdrones microdrones Headwall Photonics Thermal (IR) Hyperspectral

13 Laser scanner imagery from UAV (microdrone md-1000)

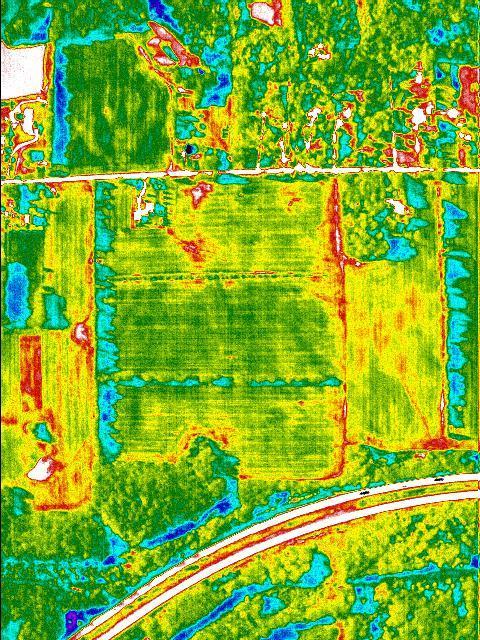
14 Thermal Imagery

15 Phantom 2+ = Cost ~ $1200
16
17

18

19


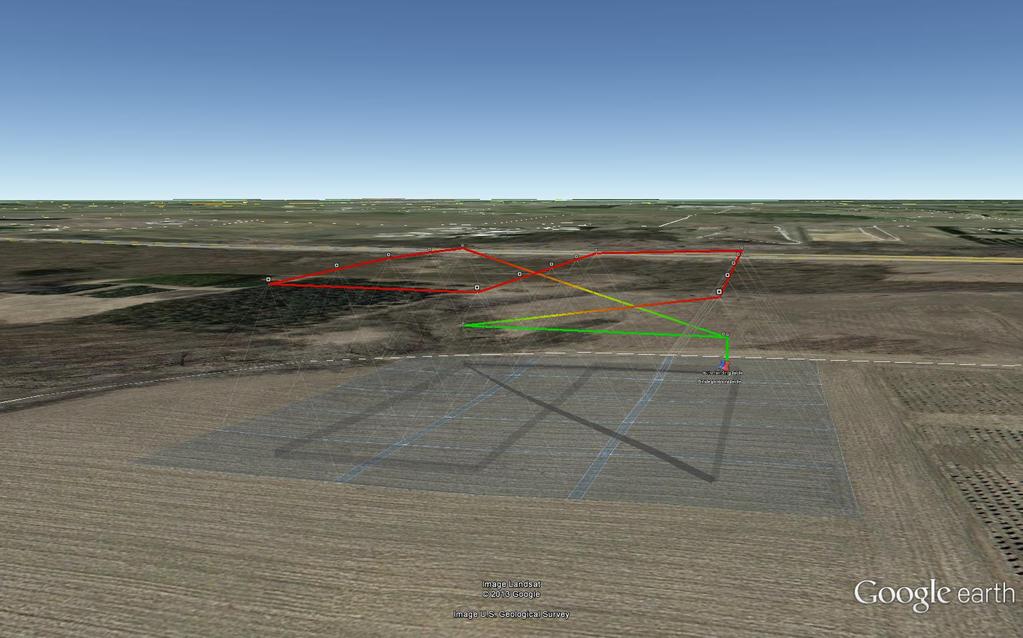
20 Stitching
21

22 Multispectral broad-band vegetation indices Mulla 2013

23 Hyperspectral narrow-band vegetation indices Mulla 2013
24 RED-Edge If chlorophyll decreases, the red-edge moves towards shorter wavelength and reflectance increases at 720 nm Barnes, et al., 2000; Fritzgerald et al., 2008; Cammarano, Basso et al., 2011, 2014
25 The chlorophyll vegetation indices Chlorophyll Indices Formula NDRE1 (NIR Combined - RE) / (NIR Chlorophyll + RE) Indices NDRE2 (RE - Red) / (RE NDRE1 + Red) / NDVI CRM NIR / RE - 1 NDRE2 / NDVI CGM NIR / Green - 1 NDRE1 / GC CVI (NIR / Green) *(Red / Green) MTCI NDRE2 / GC (NIR - RE) / (RE - Red) CARI (RE - Red) TCARI * (RE / Green) OSAVI TCARI MCARI MCARI2 3 * ((RE - Red) MCARI * (RE / OSAVI - Green) * (RE / Red)) ((RE - Red) MCARI * (RE -/ Green)) MTVI * (RE / Red) 1.5*(2.5*(NIR-Red) *(NIR-Green)) / ((2 * NIR +1)² -(6*NIR - 5*Red^0.5 - MCARI / MTVI2 0.5))^0.5 Structural Indices NDVI OSAVI MTVI MTVI2 GC Formula (NIR - Red) / (NIR + Red) (1+0,16)*(NIR-Red)/(NIR+RED+0,16) 1,5*(1,2*(NIR-Green)-2,5*(Red-Green))/((2*(2*NIR+1)^0.5-(6*NIR-5*(Red)^0.5)-0,5)) (1.5 * (1.2 * (NIR - Green) * (Red - Green))) / ( (2 * NIR + 1)^2 - (6 * NIR - 5 * (Red^0.5)) - 0.5)^0.5 Ground cover calculated with RapidEye method
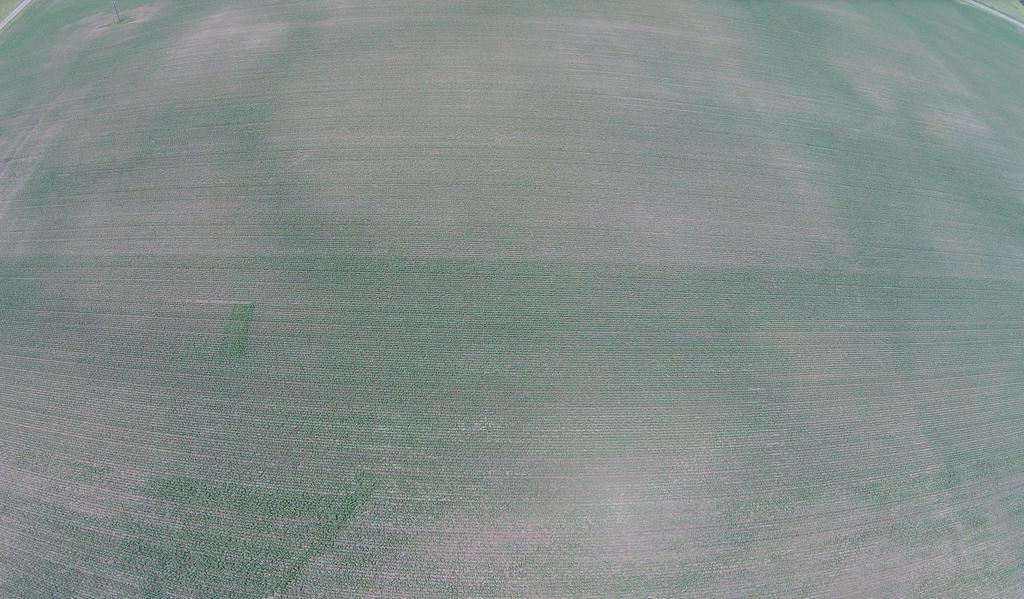
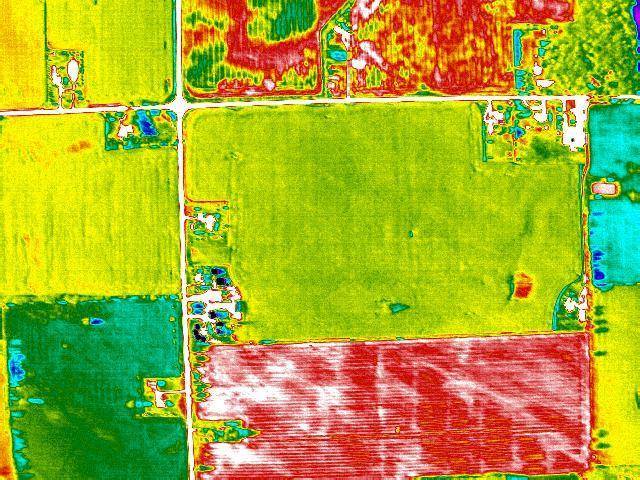
26 Vegetation Indices
27 Assessment of crop N status at the time of second N application Canopy Chlorophyll Content Index (CCCI) (Barnes et al., 2000): CCCI = (NDRE NDRE min )/(NDRE max - NDRE min ) Canopy Nitrogen Index (CNI) (Rodrigez et al., 2006): %N min = e^[1.55+(-7.38*10-3 )*biomass] %N max = e^[1.68+(-1.52*10-3 )*biomass] Equation [1]: N [g N m -2 ]= [(%N max - %N min )*(1.86*CCCI 0.346) + % N min ]*(dry biomass/100) Cammarano et al AJ
28
29 Case study: VRN N rates T1 90 Kg ha -1 T2 60 Kg ha -1 T3 30 Kg ha -1 Basso et al., 2012, 2013
30 Testing SALUS Years 0 N Measured 0 N Simulated 90 N Measured 90 N Simulated (kg/ha) (kg/ha) 1991/ / / / / / / / / / RMSE* 308 kg/ha 407 kg/ha R.E.** 14 % 12 % Basso et al., Eur. J. Agr. 2010
31 Testing SALUS 0 N 90 N Observed Mean Simulated Mean RMSE R.E. Observed Simulated RM R.E. Mean Mean SE (%) (%) N uptake Soil N Growth stages Kg N ha Kg N ha End of juvenile stage(zado ck 10) Anthesis (zadock 60) Maturity(z adock 87) 15-Mar 13-Mar 15-Mar 13-Mar 21-Apr 20-Apr 21-Apr 20-Apr 01-Jun 30-May 01-Jun 30-May Basso et al., Eur. J. Agr. 2010

32 NDVI 14 March 2009 Electrical Resistivity Tomography



33 14 March April 18 May Satellite


34 Yield Maps Media dei 5 anni
35

36 Yield Maps N rates T1 90 Kg ha -1 T2 60 Kg ha -1 T3 30 Kg ha -1
37 MTCI Class CCCI NDVI Class Confusion Matrix Nitrogen Rates Classified CCCI NDVI Index Ground Truth (Nitrogen Rates) Plots T3 (30Kg ha -1 ) T2 (60Kg ha -1 ) T1 (90Kg ha -1 ) Class1 (Low VI values) Class2 (Medium VI values) Class3 (High VI values) Difference CCCI NDVI Overall Accuracy= 71% Tot Confusion Matrix analysis Confusion Matrix Nitrogen Rates Classified MTCI Index Ground Truth (Nitrogen Rates) Plots T3 (30Kg ha -1 ) T2 (60Kg ha -1 ) T1 (90Kg ha -1 ) Class1 (Low VI values) Class2 (Medium VI values) Class3 (High VI values) Difference MTCI Overall Accuracy =50% Tot T1 90 Kg ha -1 T2 60 Kg ha -1 T3 30 Kg ha -1
38 Net Revenue ($ ha -1) Strategic and tactical N management using spatially explicit crop modeling kg N ha High Yield Zone Medium Yield Zone Low Yield Zone kg N ha kg N ha Nitrate Leaching (kg N ha -1 ) Dual criteria optimization through tested model determines the N rate that minimizes nitrate leaching and increases net revenues for farmers (Basso et al., 2011; Eur J. Agron 35: )

39 Conclusions UAVs will revolutionize data collection in agriculture and significantly improve the efficiency of input applications at the field/farm scale UAV need to be able to deliver maps that can be used by farmers to implement changes in their managament practices over space and time The integration of UAV with crop modeling is the key to understand a complex systems like crop production in space and time.
Eye In The Sky: The Future of Risk Assessment From Above
 Eye In The Sky: The Future of Risk Assessment From Above Property Insurance Report National Conference 15 November 2010 Timothy E. Carone, Ph.D. Director, Global Climate Monitoring Systems Advanced Programs
Eye In The Sky: The Future of Risk Assessment From Above Property Insurance Report National Conference 15 November 2010 Timothy E. Carone, Ph.D. Director, Global Climate Monitoring Systems Advanced Programs
Automatic image processing for agriculture through specific ENVI modules (add-on)
") Automatic image processing for agriculture through specific ENVI modules (add-on) L. García-Torres, J. J. Caballero-Novella, D. Gómez-Candón, F. López-Granados Institute for Sustainable Agriculture, CSIC,
Automatic image processing for agriculture through specific ENVI modules (add-on) L. García-Torres, J. J. Caballero-Novella, D. Gómez-Candón, F. López-Granados Institute for Sustainable Agriculture, CSIC,
Juan A. Landivar, PhD. Resident Director Corpus Christi, Weslaco
 Juan A. Landivar, PhD. Resident Director Corpus Christi, Weslaco Cooperators: Dr. Jinha Jung, Dr. Ruizhi Chen, Texas A&M Corpus Christi Mr. Murilo Maeda, Andrea Maeda, Texas A&M AgriLife TEXAS A&M AGRILIFE
Juan A. Landivar, PhD. Resident Director Corpus Christi, Weslaco Cooperators: Dr. Jinha Jung, Dr. Ruizhi Chen, Texas A&M Corpus Christi Mr. Murilo Maeda, Andrea Maeda, Texas A&M AgriLife TEXAS A&M AGRILIFE
Longevity of turf response to urea, coated urea, and blends
 Longevity of turf response to urea, coated urea, and blends K. Carey, A.J. Porter, K.S. Jordan and E.M. Lyons Department of Plant Agriculture and the Guelph Turfgrass Institute, University of Guelph, Ontario.
Longevity of turf response to urea, coated urea, and blends K. Carey, A.J. Porter, K.S. Jordan and E.M. Lyons Department of Plant Agriculture and the Guelph Turfgrass Institute, University of Guelph, Ontario.
Unmanned Aircraft Systems for Remote Sensing Beyond Pretty Pictures: Real Data, Real Information
 Unmanned Aircraft Systems for Remote Sensing Beyond Pretty Pictures: Real Data, Real Information Hobart Function and Conference Centre Hobart, Australia, 24 25 May 2017 Welcome to the conference! Introductions:
Unmanned Aircraft Systems for Remote Sensing Beyond Pretty Pictures: Real Data, Real Information Hobart Function and Conference Centre Hobart, Australia, 24 25 May 2017 Welcome to the conference! Introductions:
GREENHOUSE GAS EMISSIONS FROM SUNFLOWER CULTIVATION FOR BIOFUELS AND BIODIESEL PRODUCTION
 GREENHOUSE GAS EMISSIONS FROM SUNFLOWER CULTIVATION FOR BIOFUELS AND BIODIESEL PRODUCTION Irina CALCIU, Olga VIZITIU, Cătălin SIMOTA National Research and Development Institute for Soil Science, Agrochemistry
GREENHOUSE GAS EMISSIONS FROM SUNFLOWER CULTIVATION FOR BIOFUELS AND BIODIESEL PRODUCTION Irina CALCIU, Olga VIZITIU, Cătălin SIMOTA National Research and Development Institute for Soil Science, Agrochemistry
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
DRONE & UAV.
 www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
Design and Navigation of Flying Robots
 Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
UAV Systems Comparison. Planes, Frames and Autopilots
 UAV Systems Comparison Planes, Frames and Autopilots Presenter: Robert Lefebvre BASc Mechanical Engineering, University of Ottawa Managing Director NOVAerial Robotics Inc. Ardupilot Developer 6 Years UAV
UAV Systems Comparison Planes, Frames and Autopilots Presenter: Robert Lefebvre BASc Mechanical Engineering, University of Ottawa Managing Director NOVAerial Robotics Inc. Ardupilot Developer 6 Years UAV
Sand and Dust Monitoring in RA II
 Sand and Dust Monitoring in RA II Xiang Fang National Satellite Meteorological Center,CMA Outline Major progresses in 2015 Plan for Next Two Years on Dust monitoring Major progress in 2015 AODretrievalfromHimawari-8(H8)
Sand and Dust Monitoring in RA II Xiang Fang National Satellite Meteorological Center,CMA Outline Major progresses in 2015 Plan for Next Two Years on Dust monitoring Major progress in 2015 AODretrievalfromHimawari-8(H8)
Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation
 Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation A cooperative study between the Lower Brule Sioux Tribe s Environmental Protection Office and the U.S. Geological Survey, with assistance
Monitoring Bank Erosion On the Missouri River, Lower Brule Reservation A cooperative study between the Lower Brule Sioux Tribe s Environmental Protection Office and the U.S. Geological Survey, with assistance
THE ULTIMATE DRONE SOLUTION
 THE ULTIMATE DRONE SOLUTION LX-1 ECHELON LiDAR MULTIROTOR Brochure & Technical Specifications OVERVIEW The LX-1 Echelon is a professional-grade hexacopter equipped with a LiDAR sensing payload, and designed
THE ULTIMATE DRONE SOLUTION LX-1 ECHELON LiDAR MULTIROTOR Brochure & Technical Specifications OVERVIEW The LX-1 Echelon is a professional-grade hexacopter equipped with a LiDAR sensing payload, and designed
In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led
 was founded by current company President Alexander Zakharov, since then he has led") A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
Production of Scientific and Production Center Unmanned Aircraft Systems and Technologies
 State Scientific Institution PHYSICAL-TECHNICAL INSTITUTE OF NATIONAL ACADEMY OF SCIENCES OF BELARUS Production of Scientific and Production Center Unmanned Aircraft Systems and Technologies Physical-Technical
State Scientific Institution PHYSICAL-TECHNICAL INSTITUTE OF NATIONAL ACADEMY OF SCIENCES OF BELARUS Production of Scientific and Production Center Unmanned Aircraft Systems and Technologies Physical-Technical
Exploratory Use of Raster Images for Freight Modeling
 Exploratory Use of Raster Images for Freight Modeling Pedro Camargo PhD Student University of California, Irvine TRB SHRP2 SYMPOSIUM Innovations in Freight Demand Modeling and Data Improvement October
Exploratory Use of Raster Images for Freight Modeling Pedro Camargo PhD Student University of California, Irvine TRB SHRP2 SYMPOSIUM Innovations in Freight Demand Modeling and Data Improvement October
FLYEYE Unmanned Aerial System
 FLYEYE Unmanned Aerial System FLYEYE Unmanned Aerial System About Flytronic FLYTRONIC is a dynamic modern engineering company focussed on developing Unmanned Aerial Systems to provide observation and reconnaissance
FLYEYE Unmanned Aerial System FLYEYE Unmanned Aerial System About Flytronic FLYTRONIC is a dynamic modern engineering company focussed on developing Unmanned Aerial Systems to provide observation and reconnaissance
Utilization of Unmanned Aerial Systems (UAS) for Vegetation Mapping and Restoration
 for Vegetation Mapping and Restoration") Utilization of Unmanned Aerial Systems (UAS) for Vegetation Mapping and Restoration Jon Morton Biologist Invasive Species Management Branch West Palm Beach, Florida Jacksonville District UAS team US Army
Utilization of Unmanned Aerial Systems (UAS) for Vegetation Mapping and Restoration Jon Morton Biologist Invasive Species Management Branch West Palm Beach, Florida Jacksonville District UAS team US Army
Content. Introduction. Technology. Type of unmanned vehicle. Past, Present, Future. Conclusion
 Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
Introduction Content Technology Type of unmanned vehicle Past, Present, Future Conclusion What is unmanned vehicles? l Without a person on board l Remote controlled l Remote guided vehicles Reduce casualty
Oil Palm Ripeness Detector (OPRID) and Non-Destructive Thermal Method of Palm Oil Quality Estimation
 and Non-Destructive Thermal Method of Palm Oil Quality Estimation") Oil Palm Ripeness Detector (OPRID) and Non-Destructive Thermal Method of Palm Oil Quality Estimation Abdul Rashid Mohamed Shariff, Shahrzad Zolfagharnassab, Alhadi Aiad H. Ben Dayaf, Goh Jia Quan, Adel
Oil Palm Ripeness Detector (OPRID) and Non-Destructive Thermal Method of Palm Oil Quality Estimation Abdul Rashid Mohamed Shariff, Shahrzad Zolfagharnassab, Alhadi Aiad H. Ben Dayaf, Goh Jia Quan, Adel
UAS ISR Sensors Roadmap Update to 26 th Annual AUVSI Pathfinder Symposium 19 March 2015
 UAS ISR Sensors Roadmap Update to 26 th Annual AUVSI Pathfinder Symposium 19 March 2015 COL Casimir (Casey) Carey Director, U.S. Army Training & Doctrine Command Capability Manager for Intelligence Sensors
UAS ISR Sensors Roadmap Update to 26 th Annual AUVSI Pathfinder Symposium 19 March 2015 COL Casimir (Casey) Carey Director, U.S. Army Training & Doctrine Command Capability Manager for Intelligence Sensors
WingtraOne Technical Specifications
 WingtraOne Technical Specifications wingtra.com The all-in-one drone: large coverage, high resolution and accuracy WingtraOne Resolution Accuracy Coverage down to 0.7 cm/px (0.3 in/px) GSD down to 1 cm
WingtraOne Technical Specifications wingtra.com The all-in-one drone: large coverage, high resolution and accuracy WingtraOne Resolution Accuracy Coverage down to 0.7 cm/px (0.3 in/px) GSD down to 1 cm
Concord Fruit Thinning: Using Vine Biology and Mechanized Management to Address Market Demands in New York
 Concord Fruit Thinning: Using Vine Biology and Mechanized Management to Address Market Demands in New York Energy In: Energy Out: Energy Balance: Energy In: Energy Out: Vine Size Maximize sunlight interception
Concord Fruit Thinning: Using Vine Biology and Mechanized Management to Address Market Demands in New York Energy In: Energy Out: Energy Balance: Energy In: Energy Out: Vine Size Maximize sunlight interception
COAL FIRE QUANTIFICATION AND DETECTION USING THE DLR EXPERIMENTAL BI-SPECTRAL INFRARED DETECTION (BIRD) SMALL SATELLITE
 SMALL SATELLITE") COAL FIRE QUANTIFICATION AND DETECTION USING THE DLR EXPERIMENTAL BI-SPECTRAL INFRARED DETECTION (BIRD) SMALL SATELLITE Anke Tetzlaff a,b, Andreas Hirner a, Boris Zhukov a*, Claudia Kuenzer a and Stefan
COAL FIRE QUANTIFICATION AND DETECTION USING THE DLR EXPERIMENTAL BI-SPECTRAL INFRARED DETECTION (BIRD) SMALL SATELLITE Anke Tetzlaff a,b, Andreas Hirner a, Boris Zhukov a*, Claudia Kuenzer a and Stefan
D. Trochkine, V. Pavlov, I. Sutorikhin, A. Romanov, N. Bezuglova, G. Zinchenko
 Seasonal change of water content in the atmosphere over the West Siberia on the basis of remote sensing using ENVISAT (ESA) D. Trochkine, V. Pavlov, I. Sutorikhin, A. Romanov, N. Bezuglova, G. Zinchenko
Seasonal change of water content in the atmosphere over the West Siberia on the basis of remote sensing using ENVISAT (ESA) D. Trochkine, V. Pavlov, I. Sutorikhin, A. Romanov, N. Bezuglova, G. Zinchenko
Jay Gundlach AIAA EDUCATION SERIES. Manassas, Virginia. Joseph A. Schetz, Editor-in-Chief. Blacksburg, Virginia. Aurora Flight Sciences
 Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Jay Gundlach Aurora Flight Sciences Manassas, Virginia AIAA EDUCATION SERIES Joseph A. Schetz, Editor-in-Chief Virginia Polytechnic Institute and State University Blacksburg, Virginia Published by the
Controls with Remote Sensing Vs Monitoring: the role of Sentinel2 AGEA
 Controls with Remote Sensing Vs Monitoring: the role of Sentinel2 AGEA AGEA since 2016 use Sentinel2 for CwRS Since 2016 AGEA started to replace traditional HR data with Sentinel2 to complement VHR data
Controls with Remote Sensing Vs Monitoring: the role of Sentinel2 AGEA AGEA since 2016 use Sentinel2 for CwRS Since 2016 AGEA started to replace traditional HR data with Sentinel2 to complement VHR data
In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various
 25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
Proposal to establish a laboratory for combustion studies
 Proposal to establish a laboratory for combustion studies Jayr de Amorim Filho Brazilian Bioethanol Science and Technology Laboratory SCRE Single Cylinder Research Engine Laboratory OUTLINE Requirements,
Proposal to establish a laboratory for combustion studies Jayr de Amorim Filho Brazilian Bioethanol Science and Technology Laboratory SCRE Single Cylinder Research Engine Laboratory OUTLINE Requirements,
A.I. Ropodi, D.E. Pavlidis, D. Loukas, P. Tsakanikas, E.Z. Panagou and G.-J.E. NYCHAS.
 A.I. Ropodi, D.E. Pavlidis, D. Loukas, P. Tsakanikas, E.Z. Panagou and G.-J.E. NYCHAS E-mail: gjn@aua.gr ..an alternative approach is needed within the PAT concept This work aims to investigate the potential
A.I. Ropodi, D.E. Pavlidis, D. Loukas, P. Tsakanikas, E.Z. Panagou and G.-J.E. NYCHAS E-mail: gjn@aua.gr ..an alternative approach is needed within the PAT concept This work aims to investigate the potential
MSS. TM6 TM5 TM1. ١ - Mesopotamia
 (434 ) ( : ) 4 3 3 2 1.. 750 (UTM) 4013046 3971158 (UTM) 693451 640811 2002 ETM +.. (NDVI) 1...(0,0820) -1-2 -3-4 ١ : 1.... 1/3.. 2003 ).(1999...(2002 2003 ) 5 4 3 (1986) TM TM. TM (1990) 7 5 4 3. 95 MSS
(434 ) ( : ) 4 3 3 2 1.. 750 (UTM) 4013046 3971158 (UTM) 693451 640811 2002 ETM +.. (NDVI) 1...(0,0820) -1-2 -3-4 ١ : 1.... 1/3.. 2003 ).(1999...(2002 2003 ) 5 4 3 (1986) TM TM. TM (1990) 7 5 4 3. 95 MSS
Exhibit R-2, RDT&E Budget Item Justification
 PE NUMBER: 0305219F PE TITLE: PREDATOR Exhibit R-2, RDT&E Budget Item Justification BUDGET ACTIVITY PE NUMBER AND TITLE Cost ($ in Millions) FY 2008 FY 2009 FY 2010 FY 2011 FY 2012 FY 2013 FY 2014 FY 2015
PE NUMBER: 0305219F PE TITLE: PREDATOR Exhibit R-2, RDT&E Budget Item Justification BUDGET ACTIVITY PE NUMBER AND TITLE Cost ($ in Millions) FY 2008 FY 2009 FY 2010 FY 2011 FY 2012 FY 2013 FY 2014 FY 2015
Latest technology in specialty crop production. Good coverage + ~ 0 drift
 Latest technology in specialty crop production Good coverage + ~ 0 drift Unmanned Aircraft for Agricultural Spraying of Specialty Crops Ken Giles Ryan Billing UC-Davis Biological & Agricultural Engineering
Latest technology in specialty crop production Good coverage + ~ 0 drift Unmanned Aircraft for Agricultural Spraying of Specialty Crops Ken Giles Ryan Billing UC-Davis Biological & Agricultural Engineering
IASI Conference Nov., 2007 Atlanthal Hotel Anglet, France
 MAIA Cloud Detection, IASI/AVHRR Cloud Clearing & Their Impact on Sounding Retrieval Allen Huang, Hong Zhang, Elisabeth Weisz, Hal Woolf & Jun Li Cooperative Institute for Meteorological Satellite Studies
MAIA Cloud Detection, IASI/AVHRR Cloud Clearing & Their Impact on Sounding Retrieval Allen Huang, Hong Zhang, Elisabeth Weisz, Hal Woolf & Jun Li Cooperative Institute for Meteorological Satellite Studies
LiDAR Teach-In OSRAM Licht AG June 20, 2018 Munich Light is OSRAM
 www.osram.com LiDAR Teach-In June 20, 2018 Munich Light is OSRAM Agenda Introduction Autonomous driving LIDAR technology deep-dive LiDAR@OS: Emitter technologies Outlook LiDAR Tech Teach-In June 20, 2018
www.osram.com LiDAR Teach-In June 20, 2018 Munich Light is OSRAM Agenda Introduction Autonomous driving LIDAR technology deep-dive LiDAR@OS: Emitter technologies Outlook LiDAR Tech Teach-In June 20, 2018
suas in CAP Delaware Wing HQ, Civil Air Patrol Development of small Unmanned Aerial Systems
 Delaware Wing HQ, Civil Air Patrol suas in CAP Development of small Unmanned Aerial Systems Advent of the suas Small Unmanned Aerial Systems have become very common recently Sophisticated microprocessors
Delaware Wing HQ, Civil Air Patrol suas in CAP Development of small Unmanned Aerial Systems Advent of the suas Small Unmanned Aerial Systems have become very common recently Sophisticated microprocessors
THE FALCON REDUNDANCY HIGH WIND TOLERANCE BEST USED FOR SURVEILLANCE & SECURITY DELIVERY & TRANSPORT
 THE FALCON REDUNDANCY HIGH WIND TOLERANCE The Falcon's new air frame and motor configuration is the new best in its class of light payloads with flight times of up to 50 minutes. This makes the Falcon
THE FALCON REDUNDANCY HIGH WIND TOLERANCE The Falcon's new air frame and motor configuration is the new best in its class of light payloads with flight times of up to 50 minutes. This makes the Falcon
Aeronautical Systems Center
 Aeronautical Systems Center Global Hawk Program Overview Michael Johnston 303 AESG/LG DSN: 787-4047 Comm: 937-255-4047 michael.johnston@wpafb.af.mil RQ-4A Global Hawk System Global Hawk: High-altitude,
Aeronautical Systems Center Global Hawk Program Overview Michael Johnston 303 AESG/LG DSN: 787-4047 Comm: 937-255-4047 michael.johnston@wpafb.af.mil RQ-4A Global Hawk System Global Hawk: High-altitude,
MINI-REIS A FAMILY OF MULTIFUNCTIONAL UNMANNED LIGHT JET AIRCRAFTS
 National Aerospace University Kharkiv Aviation Institute KhAI Public Joint Stock Company "Kyiv Radio Plant" Inter-Industry Scientific & Research Institute of the Problems of Aircraft Flight Mode Physical
National Aerospace University Kharkiv Aviation Institute KhAI Public Joint Stock Company "Kyiv Radio Plant" Inter-Industry Scientific & Research Institute of the Problems of Aircraft Flight Mode Physical
Appendix E Water Supply Modeling
 Supply Modeling Modesto Irrigation District Treatment Plant Expansion Project Modeling I. Introduction The Modesto Irrigation District (MID) is situated adjacent to and north of the Tuolumne River. Over
Supply Modeling Modesto Irrigation District Treatment Plant Expansion Project Modeling I. Introduction The Modesto Irrigation District (MID) is situated adjacent to and north of the Tuolumne River. Over
Test like you Train Train like you Fight
 War-Winning Winning Capabilities On Time, On Cost Test like you Train Train like you Fight How Today s s Complexity Drives Future Range Requirements Major General David J. Eichhorn AFFTC Commander This
War-Winning Winning Capabilities On Time, On Cost Test like you Train Train like you Fight How Today s s Complexity Drives Future Range Requirements Major General David J. Eichhorn AFFTC Commander This
Solar based Automatic Harvesting Robot
 Solar based Automatic Harvesting Robot Elango A 1, Senthil Kumar S 2, Vijaykumar R 3, Muthulingaraj M 4, Rajnivas B 5 1,2,3,4, Department of Mechatronics Engineering, PPG Institute of Technology, Coimbatore,
Solar based Automatic Harvesting Robot Elango A 1, Senthil Kumar S 2, Vijaykumar R 3, Muthulingaraj M 4, Rajnivas B 5 1,2,3,4, Department of Mechatronics Engineering, PPG Institute of Technology, Coimbatore,
GRID Structure Based Processing of Geographical and Environment Data
 GRID Structure Based Processing of Geographical and Environment Data Dorian Gorgan, Cornelia Melenti Computer Science Department Technical University of Cluj-Napoca dorian.gorgan@cs.utcluj.ro, cornelia.melenti@cs.utcluj.ro
GRID Structure Based Processing of Geographical and Environment Data Dorian Gorgan, Cornelia Melenti Computer Science Department Technical University of Cluj-Napoca dorian.gorgan@cs.utcluj.ro, cornelia.melenti@cs.utcluj.ro
RSB List of Documents and references
 Type of document: Reference Document Date: 20 March 2017 RSB List of Documents and references RSB reference code: [RSB-DOC-10-001] Published by the Roundtable on Sustainable Biomaterials. This publication
Type of document: Reference Document Date: 20 March 2017 RSB List of Documents and references RSB reference code: [RSB-DOC-10-001] Published by the Roundtable on Sustainable Biomaterials. This publication
UNCLASSIFIED R-1 ITEM NOMENCLATURE. FY 2014 FY 2014 OCO ## Total FY 2015 FY 2016 FY 2017 FY 2018
 COST ($ in Millions) Years FY 2012 FY 2013 # ## FY 2015 FY 2016 FY 2017 FY 2018 To Program Element 335.638 51.642 9.122 3.326-3.326 1.396 0.930 0.279 0.284 0.000 402.617 675143: Predator 335.638 51.642
COST ($ in Millions) Years FY 2012 FY 2013 # ## FY 2015 FY 2016 FY 2017 FY 2018 To Program Element 335.638 51.642 9.122 3.326-3.326 1.396 0.930 0.279 0.284 0.000 402.617 675143: Predator 335.638 51.642
Predator Program Office
 Predator Program Office Developing, Fielding, and Sustaining America s Aerospace Force Predator Program Overview 14 June 02 Lt Col Stephen DeCou ASC/RABP DSN:785-4504 Stephen.DeCou@wpafb.af.mil Report
Predator Program Office Developing, Fielding, and Sustaining America s Aerospace Force Predator Program Overview 14 June 02 Lt Col Stephen DeCou ASC/RABP DSN:785-4504 Stephen.DeCou@wpafb.af.mil Report
ISEM (Infrared Spectrometer for ExoMars)
") ISEM (Infrared Spectrometer for ExoMars) Optical Box (OB) ISEM Electronic Box (EB) ISEM O. Korablev (PI), A. Ivanov (PM) A. Fedorova, N. Evodokimova, S. Mantsevich and the ISEM Team IKI - Space Research
ISEM (Infrared Spectrometer for ExoMars) Optical Box (OB) ISEM Electronic Box (EB) ISEM O. Korablev (PI), A. Ivanov (PM) A. Fedorova, N. Evodokimova, S. Mantsevich and the ISEM Team IKI - Space Research
Energy ITS: What We Learned and What We should Learn
 Energy ITS: What We Learned and What We should Learn July 25, 2012 TRB Road Vehicle Automation Workshop Sadayuki Tsugawa, Dr. Eng. NEDO Energy ITS Project Leader Professor, Department of Information Engineering
Energy ITS: What We Learned and What We should Learn July 25, 2012 TRB Road Vehicle Automation Workshop Sadayuki Tsugawa, Dr. Eng. NEDO Energy ITS Project Leader Professor, Department of Information Engineering
Integrating remote sensing and ground monitoring data to improve estimation of PM 2.5 concentrations for chronic health studies
 Integrating remote sensing and ground monitoring data to improve estimation of PM 2.5 concentrations for chronic health studies Chris Paciorek and Yang Liu Departments of Biostatistics and Environmental
Integrating remote sensing and ground monitoring data to improve estimation of PM 2.5 concentrations for chronic health studies Chris Paciorek and Yang Liu Departments of Biostatistics and Environmental
Analysts/Fund Managers Visit 19 April Autonomous Systems and Future Capability Mark Kane
 Analysts/Fund Managers Visit 19 April 2007 Autonomous Systems and Future Capability Mark Kane The Rationale for UAVs The Rationale for UAVs UAVs generally seen to carry out the dull, dirty, and dangerous
Analysts/Fund Managers Visit 19 April 2007 Autonomous Systems and Future Capability Mark Kane The Rationale for UAVs The Rationale for UAVs UAVs generally seen to carry out the dull, dirty, and dangerous
A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere.
 Key Features A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere. Supported Vehicle Types s Multirotors Fixed-wings Bi-, tri- and quadcopter tailsitters, quadplanes and tiltrotors.
Key Features A complete hybrid VTOL autopilot solution. Start anywhere, fly everywhere. Supported Vehicle Types s Multirotors Fixed-wings Bi-, tri- and quadcopter tailsitters, quadplanes and tiltrotors.
The MoD Grand Challenge 2008: A Barnard Team Perspective
 The Bristol UAV Systems Conference 2009 The MoD Grand Challenge 2008: A Barnard Team Perspective Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com Barnard Microsystems Limited 134 Crouch Hill London
The Bristol UAV Systems Conference 2009 The MoD Grand Challenge 2008: A Barnard Team Perspective Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com Barnard Microsystems Limited 134 Crouch Hill London
Draft Project Deliverables: Policy Implications and Technical Basis
 Surveillance and Monitoring Program (SAMP) Joe LeClaire, PhD Richard Meyerhoff, PhD Rick Chappell, PhD Hannah Erbele Don Schroeder, PE February 25, 2016 Draft Project Deliverables: Policy Implications
Surveillance and Monitoring Program (SAMP) Joe LeClaire, PhD Richard Meyerhoff, PhD Rick Chappell, PhD Hannah Erbele Don Schroeder, PE February 25, 2016 Draft Project Deliverables: Policy Implications
Dust infrared aerosol properties observed from infrared hyperspectral sounders: Analysis of the diurnal variation
 Dust infrared aerosol properties observed from infrared hyperspectral sounders: Analysis of the diurnal variation V. Capelle 1, A. Chédin 1, M. Pondrom 1, R. Mechri C. Pierangelo 2, R. Armante 1, C. Crevoisier
Dust infrared aerosol properties observed from infrared hyperspectral sounders: Analysis of the diurnal variation V. Capelle 1, A. Chédin 1, M. Pondrom 1, R. Mechri C. Pierangelo 2, R. Armante 1, C. Crevoisier
[Kadam*et al., 5(8):August, 2016] ISSN: IC Value: 3.00 Impact Factor: 4.116
![[Kadam*et al., 5(8):August, 2016] ISSN: IC Value: 3.00 Impact Factor: 4.116](/thumbs/90/103495984.jpg "[Kadam*et al., 5(8):August, 2016] ISSN: IC Value: 3.00 Impact Factor: 4.116") IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY VOICE GUIDED DRIVER ASSISTANCE SYSTEM BASED ON RASPBERRY-Pi Sonali Kadam, Sunny Surwade, S.S. Ardhapurkar* * Electronics and telecommunication
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY VOICE GUIDED DRIVER ASSISTANCE SYSTEM BASED ON RASPBERRY-Pi Sonali Kadam, Sunny Surwade, S.S. Ardhapurkar* * Electronics and telecommunication
UNCLASSIFIED FY 2016 OCO. FY 2016 Base
 Exhibit R-2, RDT&E Budget Item Justification: PB 2016 Army : February 2015 2040: Research, Development, Test & Evaluation, Army / BA 7: Operational Systems Development COST ($ in Millions) Years FY 2017
Exhibit R-2, RDT&E Budget Item Justification: PB 2016 Army : February 2015 2040: Research, Development, Test & Evaluation, Army / BA 7: Operational Systems Development COST ($ in Millions) Years FY 2017
Current and Future Applications of MEMS for Automotive Industry
 Current and Future Applications of MEMS for Automotive Industry June 2013 Moscow, Russia Christophe Fitamant Yole Développement Sales and Marketing Director 2013 Copyrights Yole Développement SARL. All
Current and Future Applications of MEMS for Automotive Industry June 2013 Moscow, Russia Christophe Fitamant Yole Développement Sales and Marketing Director 2013 Copyrights Yole Développement SARL. All
Engine Transient Characteristics Simulation Technology using Zero-dimensional Combustion Model
 25 Engine Transient Characteristics Simulation Technology using Zero-dimensional Combustion Model TAKAYUKI YAMAMOTO *1 KENJI HIRAOKA *2 NAOYUKI MORI *2 YUJI ODA *3 AKIHIRO YUUKI *4 KENICHI ISONO *5 The
25 Engine Transient Characteristics Simulation Technology using Zero-dimensional Combustion Model TAKAYUKI YAMAMOTO *1 KENJI HIRAOKA *2 NAOYUKI MORI *2 YUJI ODA *3 AKIHIRO YUUKI *4 KENICHI ISONO *5 The
Indonesia Biomass estimation for epoch 2010
 Indonesia Biomass estimation for epoch 2010 Sandra Englhart Matthias Stängel Florian Siegert Remote Sensing Solutions GmbH Borneo Area: Kalimantan 540,000 km² Different forest ecosystems: Mangrove forests
Indonesia Biomass estimation for epoch 2010 Sandra Englhart Matthias Stängel Florian Siegert Remote Sensing Solutions GmbH Borneo Area: Kalimantan 540,000 km² Different forest ecosystems: Mangrove forests
2015 AUVSI UAS Competition Journal Paper
 2015 AUVSI UAS Competition Journal Paper Abstract We are the Unmanned Aerial Systems (UAS) team from the South Dakota School of Mines and Technology (SDSM&T). We have built an unmanned aerial vehicle (UAV)
2015 AUVSI UAS Competition Journal Paper Abstract We are the Unmanned Aerial Systems (UAS) team from the South Dakota School of Mines and Technology (SDSM&T). We have built an unmanned aerial vehicle (UAV)
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials. Ripley Valley Rural Fire Brigade - August 2010
 Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
Fire Fighting Equipment Development - Unmanned Aerial Vehicle Trials Ripley Valley Rural Fire Brigade - August 2010 The Brigade offered to help evaluate the capabilities of an Unmanned Aerial Vehicle (UAV)
RSB ROUNDTABLE ON SUSTAINABLE BIOMATERIALS RSB List of Documents and references. 18 January RSB reference code: RSB-DOC
 RSB ROUNDTABLE ON SUSTAINABLE BIOMATERIALS RSB List of Documents and references 18 January 2019 RSB reference code: RSB-DOC-10-001 Published by the Roundtable on Sustainable Biomaterials. This publication
RSB ROUNDTABLE ON SUSTAINABLE BIOMATERIALS RSB List of Documents and references 18 January 2019 RSB reference code: RSB-DOC-10-001 Published by the Roundtable on Sustainable Biomaterials. This publication
REMOTE SENSING MEASUREMENTS OF ON-ROAD HEAVY-DUTY DIESEL NO X AND PM EMISSIONS E-56
 REMOTE SENSING MEASUREMENTS OF ON-ROAD HEAVY-DUTY DIESEL NO X AND PM EMISSIONS E-56 January 2003 Prepared for Coordinating Research Council, Inc. 3650 Mansell Road, Suite 140 Alpharetta, GA 30022 by Robert
REMOTE SENSING MEASUREMENTS OF ON-ROAD HEAVY-DUTY DIESEL NO X AND PM EMISSIONS E-56 January 2003 Prepared for Coordinating Research Council, Inc. 3650 Mansell Road, Suite 140 Alpharetta, GA 30022 by Robert
The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production
 AUVSI Unmanned Systems North America 2013 Conference August 14, 2013 The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com
AUVSI Unmanned Systems North America 2013 Conference August 14, 2013 The requirements for unmanned aircraft operating in oil, gas and mineral exploration and production Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com
Palos Verdes High School 1
 Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Abstract: The Palos Verdes High School Institute of Technology (PVIT) Unmanned Aerial Vehicle team is proud to present Condor. Condor is a hexacopter weighing in at 1664g including the 4 cell 11.1 volt,
Tactical Technology Office. Tactical Technology Office. Programs. DARPATech 2000 Dr. David Whelan Director Whelan Darpatech
 Programs DARPATech 2000 Dr. David Whelan Director dwhelan@darpa.mil Global Surveillance Land Systems Aerospace Systems Embedded Processing & Control Global Surveillance Objectives: Birth-to-Death Track
Programs DARPATech 2000 Dr. David Whelan Director dwhelan@darpa.mil Global Surveillance Land Systems Aerospace Systems Embedded Processing & Control Global Surveillance Objectives: Birth-to-Death Track
Nondestructive Detection and Quantification of Blueberry Bruising using Near-infrared (NIR) Hyperspectral Reflectance Imaging
 Hyperspectral Reflectance Imaging") Nondestructive Detection and Quantification of Blueberry Bruising using Near-infrared (NIR) Hyperspectral Reflectance Imaging Supplementary Materials Yu Jiang 1, Changying Li 1,*, and Fumiomi Takeda 2
Nondestructive Detection and Quantification of Blueberry Bruising using Near-infrared (NIR) Hyperspectral Reflectance Imaging Supplementary Materials Yu Jiang 1, Changying Li 1,*, and Fumiomi Takeda 2
Deployment and Performance of a UAV for Crop Spraying
 A publication of CHEMICAL ENGINEERING TRANSACTIONS VOL. 44, 2015 Guest Editors: Riccardo Guidetti, Luigi Bodria, Stanley Best Copyright 2015, AIDIC Servizi S.r.l., ISBN 978-88-95608-35-8; ISSN 2283-9216
A publication of CHEMICAL ENGINEERING TRANSACTIONS VOL. 44, 2015 Guest Editors: Riccardo Guidetti, Luigi Bodria, Stanley Best Copyright 2015, AIDIC Servizi S.r.l., ISBN 978-88-95608-35-8; ISSN 2283-9216
CORINE Title Land Cover. First name SURNAME György BÜTTNER Position Senior advisor
 CORINE Title Land Cover First name SURNAME György BÜTTNER Position Senior advisor Name EEA/ IDM4 of the entity Place, Copenhagen, date 19/10/2015 Outline CLC basics Geographic coverage of CLC2012 Methodology
CORINE Title Land Cover First name SURNAME György BÜTTNER Position Senior advisor Name EEA/ IDM4 of the entity Place, Copenhagen, date 19/10/2015 Outline CLC basics Geographic coverage of CLC2012 Methodology
RESEARCH FOR NEW UAV CAPABILITIES
 I 1 1 LA-UR- 96: 279 RESEARCH FOR NEW UAV CAPABILITIES Title: Author(@: Submitted to: 1 Gregory H. Canavan, DDP For discussions outside the Laboratory Date: July 1996 Los Alamos NATIONAL LABORATORY Los
I 1 1 LA-UR- 96: 279 RESEARCH FOR NEW UAV CAPABILITIES Title: Author(@: Submitted to: 1 Gregory H. Canavan, DDP For discussions outside the Laboratory Date: July 1996 Los Alamos NATIONAL LABORATORY Los
BY HOEYCOMB AEROSPACE TECHNOLOGIES. HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV
 BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
SURVEYOR-H. Technical Data. Max speed 120 km/h. Engine power 7.2 hp. Powerplant Modified Zenoah G29E. Fuel tank volume 3.6 l
 rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology
 1953-2014 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology 01 Aircraft Engines Division Airworthiness Division IT Logistics Support Systems Division Aeroplanes & Helicopters Division
1953-2014 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology 01 Aircraft Engines Division Airworthiness Division IT Logistics Support Systems Division Aeroplanes & Helicopters Division
Diamond Aircraft Group
 Diamond Aircraft Group Johannes A. Frauenberger Accountable Manager Diamond Aircraft Austria Hanoi 2014 Diamond Aircraft Industries Diamond Aircraft Industries Canada, Ontario Diamond Aircraft Industries
Diamond Aircraft Group Johannes A. Frauenberger Accountable Manager Diamond Aircraft Austria Hanoi 2014 Diamond Aircraft Industries Diamond Aircraft Industries Canada, Ontario Diamond Aircraft Industries
A SOLAR POWERED UAV. 1 Introduction. 2 Requirements specification
 A SOLAR POWERED UAV Students: R. al Amrani, R.T.J.P.A. Cloosen, R.A.J.M. van den Eijnde, D. Jong, A.W.S. Kaas, B.T.A. Klaver, M. Klein Heerenbrink, L. van Midden, P.P. Vet, C.J. Voesenek Project tutor:
A SOLAR POWERED UAV Students: R. al Amrani, R.T.J.P.A. Cloosen, R.A.J.M. van den Eijnde, D. Jong, A.W.S. Kaas, B.T.A. Klaver, M. Klein Heerenbrink, L. van Midden, P.P. Vet, C.J. Voesenek Project tutor:
Design and Development of the UTSA Unmanned Aerial System ACE 1
 Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Journal of Emerging Trends in Computing and Information Sciences
 Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
GOCI Yonsei aerosol retrievals during 2012 DRAGON-NE Asia and 2015 MAPS-Seoul campaigns
 The Sixth Asia/Oceania Meteorological Satellite Users' Conference 09 13 November 2015, Tokyo/Japan GOCI Yonsei aerosol retrievals during 2012 DRAGON-NE Asia and 2015 MAPS-Seoul campaigns Myungje Choi (1),
The Sixth Asia/Oceania Meteorological Satellite Users' Conference 09 13 November 2015, Tokyo/Japan GOCI Yonsei aerosol retrievals during 2012 DRAGON-NE Asia and 2015 MAPS-Seoul campaigns Myungje Choi (1),
First results and next steps in Kazakhstan Earth Observation missions in cooperation with SSTL
 First results and next steps in Kazakhstan Earth Observation missions in cooperation with SSTL M.Moldabekov (1), M.Nurguzhin (2), V.Ten (3), S.Murushkin (3), H.Lambert (3), A.da Silva Curiel (4), D.King
First results and next steps in Kazakhstan Earth Observation missions in cooperation with SSTL M.Moldabekov (1), M.Nurguzhin (2), V.Ten (3), S.Murushkin (3), H.Lambert (3), A.da Silva Curiel (4), D.King
The Central London Congestion Charge
 The Central London Congestion Charge Mike Keegan, Transport Planning & Policy Transport for London The charge for having a vehicle* in the zone is 8 per day, weekdays, 7a.m. to 6.30 p.m. * Some vehicles
The Central London Congestion Charge Mike Keegan, Transport Planning & Policy Transport for London The charge for having a vehicle* in the zone is 8 per day, weekdays, 7a.m. to 6.30 p.m. * Some vehicles
Prototyping Collision Avoidance for suas
 Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Vegetation Resources Inventory Photo Interpretation (Phase 1) Project Implementation Plan for Haida Gwaii. June 20, 2011
 Project Implementation Plan for Haida Gwaii. June 20, 2011") Vegetation Resources Inventory Photo Interpretation (Phase 1) Project Implementation Plan for Haida Gwaii June 20, 2011 Table of Contents 1.0 Introduction.. 3 1.1 Background Information 3 1.2 Project Land
Vegetation Resources Inventory Photo Interpretation (Phase 1) Project Implementation Plan for Haida Gwaii June 20, 2011 Table of Contents 1.0 Introduction.. 3 1.1 Background Information 3 1.2 Project Land
HCS+ and HCS Approach: Linkages with the RSPO Process
 ROUNDTABLE MEETING ON SUSTAINABLE PALM OIL HCS+ and HCS Approach: Linkages with the RSPO Process Faizal Parish Global Environment Centre Co Chair RSPO Emission Reduction Working Group 1 RSPO and HCS RSPO
ROUNDTABLE MEETING ON SUSTAINABLE PALM OIL HCS+ and HCS Approach: Linkages with the RSPO Process Faizal Parish Global Environment Centre Co Chair RSPO Emission Reduction Working Group 1 RSPO and HCS RSPO
Supplementary Information for Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure Remote Sensing
 Supplementary Information for Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure Remote Sensing 2015, 7, 13895 13920 Table S1. List of UAV flight configurations
Supplementary Information for Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure Remote Sensing 2015, 7, 13895 13920 Table S1. List of UAV flight configurations
Remotely Piloted Aircraft Systems (RPAS) Beyond Line Of Sight (BLOS) Applications. Royal Aeronautical Society HQ Lecture 11 March 2015
 Beyond Line Of Sight (BLOS) Applications. Royal Aeronautical Society HQ Lecture 11 March 2015") Remotely Piloted Aircraft Systems (RPAS) Beyond Line Of Sight (BLOS) Applications Royal Aeronautical Society HQ Lecture 11 March 2015 Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com Barnard Microsystems
Remotely Piloted Aircraft Systems (RPAS) Beyond Line Of Sight (BLOS) Applications Royal Aeronautical Society HQ Lecture 11 March 2015 Dr Joseph Barnard joseph.barnard@barnardmicrosystems.com Barnard Microsystems
EFFECTS OF CONVEYOR AND GROUND SPEED
 Precision Agriculture Peanut Research Update Kendall Kirk 1, James Thomas 1, Benjamin Fogle 1, Hunter Massey 2, and Dan Anco 1 1 Edisto Research & Education Center, Clemson University, Blackville, SC 2
Precision Agriculture Peanut Research Update Kendall Kirk 1, James Thomas 1, Benjamin Fogle 1, Hunter Massey 2, and Dan Anco 1 1 Edisto Research & Education Center, Clemson University, Blackville, SC 2
BEA Pedestrian. Sensor solutions for revolving doors
 EN BEA Pedestrian Sensor solutions for revolving doors Introduction Summary BEA s.a. has been active in the area of detection since 1965 and was one of the the first company to launch a Dopplereffect radar
EN BEA Pedestrian Sensor solutions for revolving doors Introduction Summary BEA s.a. has been active in the area of detection since 1965 and was one of the the first company to launch a Dopplereffect radar
Modeling, Structural & CFD Analysis and Optimization of UAV
 Modeling, Structural & CFD Analysis and Optimization of UAV Dr Lazaros Tsioraklidis Department of Unified Engineering InterFEA Engineering, Tantalou 7 Thessaloniki GREECE Next Generation tools for UAV
Modeling, Structural & CFD Analysis and Optimization of UAV Dr Lazaros Tsioraklidis Department of Unified Engineering InterFEA Engineering, Tantalou 7 Thessaloniki GREECE Next Generation tools for UAV
2012 AUVSI SUAS Student Competition Journal Paper. Kansas State University Salina UAS Club. Prepared By: Mark Wilson Coby Tenpenny Colby Walter
 2012 AUVSI SUAS Student Competition Journal Paper Kansas State University Salina UAS Club Prepared By: Mark Wilson Coby Tenpenny Colby Walter May 14, 2012 Willie Abstract The Willie Unmanned Aerial System
2012 AUVSI SUAS Student Competition Journal Paper Kansas State University Salina UAS Club Prepared By: Mark Wilson Coby Tenpenny Colby Walter May 14, 2012 Willie Abstract The Willie Unmanned Aerial System
Monthly Hog Market Update United States Hog Production
 This information is provided as a resource by Saskatchewan Agriculture staff All prices are in Canadian dollars unless otherwise noted. Please use this information at your own risk. Monthly Hog Market
This information is provided as a resource by Saskatchewan Agriculture staff All prices are in Canadian dollars unless otherwise noted. Please use this information at your own risk. Monthly Hog Market
RIETI BBL Seminar Handout
 Research Institute of Economy, Trade and Industry (RIETI) RIETI BBL Seminar Handout Autonomous Vehicles, Infrastructure Policy, and Economic Growth September 25, 2018 Speaker: Clifford Winston https://www.rieti.go.jp/jp/index.html
Research Institute of Economy, Trade and Industry (RIETI) RIETI BBL Seminar Handout Autonomous Vehicles, Infrastructure Policy, and Economic Growth September 25, 2018 Speaker: Clifford Winston https://www.rieti.go.jp/jp/index.html
HDV CO2 emission certification 1 st meeting of the Editing board
 HDV CO2 emission certification 1 st meeting of the Editing board DG Growth Maciej Szymański 2.03.2015 Internal market, Industry, Entrepreneurship and SMEs Meeting agenda Work of the Editing board: Objectives
HDV CO2 emission certification 1 st meeting of the Editing board DG Growth Maciej Szymański 2.03.2015 Internal market, Industry, Entrepreneurship and SMEs Meeting agenda Work of the Editing board: Objectives
Development, Certification, and Flight Testing of an OPA for UAS FTT Development and Training at NTPS
 Development, Certification, and Flight Testing of an OPA for UAS FTT Development and Training at NTPS 2013 SFTE/SETP Flight Test Symposium Evolution of Flight Testing from Manned Vehicles to UAVs 1 Overview
Development, Certification, and Flight Testing of an OPA for UAS FTT Development and Training at NTPS 2013 SFTE/SETP Flight Test Symposium Evolution of Flight Testing from Manned Vehicles to UAVs 1 Overview
California Low Carbon Fuel Standard Status Report. John D. Courtis October 17, 2011
 California Low Carbon Fuel Standard Status Report John D. Courtis October 17, 2011 Background CA legislature adopts Global Warming Solutions Act (AB 32) in 2006 Board passes LCFS April 2009 Title 17, CCR,
California Low Carbon Fuel Standard Status Report John D. Courtis October 17, 2011 Background CA legislature adopts Global Warming Solutions Act (AB 32) in 2006 Board passes LCFS April 2009 Title 17, CCR,
Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007
 Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007 UAV Sergio Esteban sesteban@us.es 1 Advanced Technologies and Engineering Co (Pty) Ltd (ATE). Vulture Production: Production
Ejemplos de aeronaves existentes similares a las propuestas en los RFP 2007 UAV Sergio Esteban sesteban@us.es 1 Advanced Technologies and Engineering Co (Pty) Ltd (ATE). Vulture Production: Production
Detection of rash driving on highways
 Detection of rash driving on highways 1 Ladly Patel, 2 Kumar Abhishek Gaurav, 3 Dr. Revathi V 1,2 Mtech. CSE (Big Data & IoT), 3 Associate Professor Dayananda Sagar University, Bengaluru, India Abstract-
Detection of rash driving on highways 1 Ladly Patel, 2 Kumar Abhishek Gaurav, 3 Dr. Revathi V 1,2 Mtech. CSE (Big Data & IoT), 3 Associate Professor Dayananda Sagar University, Bengaluru, India Abstract-
UNMANNED AIR VEHICLE ( UAV ) USE IN THE MUNICIPAL GOVERNMENT ENVIRONMENT RECOMMENDATION
 USE IN THE MUNICIPAL GOVERNMENT ENVIRONMENT RECOMMENDATION") TO: FROM: CHAIR AND MEMBERS CIVIC WORKS COMMITTEE MEETING ON SEPTEMBER 7, 2016 JOHN BRAAM, P.ENG. MANAGING DIRECTOR, ENVIRONMENTAL & ENGINEERING SERVICES AND CITY ENGINEER SUBJECT: UNMANNED AIR VEHICLE
TO: FROM: CHAIR AND MEMBERS CIVIC WORKS COMMITTEE MEETING ON SEPTEMBER 7, 2016 JOHN BRAAM, P.ENG. MANAGING DIRECTOR, ENVIRONMENTAL & ENGINEERING SERVICES AND CITY ENGINEER SUBJECT: UNMANNED AIR VEHICLE
Electric Penguin s philosophy:
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
Optimizing data assimilation strategy for a global aerosol model with a multi-sensor constellation
 Optimizing data assimilation strategy for a global aerosol model with a multi-sensor constellation Edward Hyer, Peng Xian NRL Monterey, CA Jianglong Zhang University of North Dakota Grand Forks, ND American
Optimizing data assimilation strategy for a global aerosol model with a multi-sensor constellation Edward Hyer, Peng Xian NRL Monterey, CA Jianglong Zhang University of North Dakota Grand Forks, ND American
Austrian Show Case Disaster Relief. Diamond Aircraft, Hanoi February DAI-Marketing/Mandl
 Austrian Show Case Disaster Relief Diamond Aircraft, Hanoi 20 21 February 2012 Multiple requirements Multi Purpose Platform 1. Company Movie 2. Company presentation 3. Disaster relief 4. Security 5. One-stop
Austrian Show Case Disaster Relief Diamond Aircraft, Hanoi 20 21 February 2012 Multiple requirements Multi Purpose Platform 1. Company Movie 2. Company presentation 3. Disaster relief 4. Security 5. One-stop