Driver Performance in the Presence of Adaptive Cruise Control Related Failures
|
|
|
- Iris Tate
- 5 years ago
- Views:
Transcription
1 Driver Performance in the Presence of Adaptive Cruise Control Related Failures WORCS13, June 24, 2013 Josef Nilsson (1), Niklas Strand (2), Paolo Falcone (3), Jonny Vinter (1) (1) SP Technical Research Institute of Sweden (2) VTI Swedish National Road and Transport Research Institute (3) Chalmers University of Technology



2 The SHADES project SHADES - System safety through combination of HMI and Dependable Systems Budget: 1 MEUR Financed by SAFER

3 Driver assistance systems Information/Warning Systems Forward Collision Warning Lane Departure Warning Blind Spot Monitoring Active assistance/semi automation Collision Avoidance by Braking Lane Keep Assist Adaptive Cruise Control Full/High automation Lateral and longitudinal automation Platooning lateral longitudinal
4 Focus in this study Driver Vehicle Driver assistance system malfunctions that cause hazards
5 Questions before the study What are the safety issues considering failures of an adaptive cruise control system (ACC)? How do drivers handle failures in an ACC? How to develop strategies to improve driver controllability?
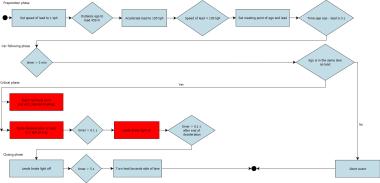
6 Experimental setup Adaptive Cruise Control (ACC) Driving simulator study Four failure modes Unwanted acceleration Complete brake failure Partial brake failure Speed limit violation There was no warning indicating a failure All with the same initial settings ACC activated 105 kph (65 mph) Following leader with a 2 second time-gap No vehicle in left lane (free to overtake) Lead Ego 2 s






7 Chalmers driving simulator
8 Driving simulator experiment Fault injection support Relative Velocity Relative Distance Own Velocity Desired Acceleration Set Time-Headway Engine torque Desired Acceleration Brake pedal position Lower level controller Set Maximum-Speed Upper level controller
9 Driving simulator experiment Adaptive cruise control Relative Velocity Fault injection block Relative Distance Own Velocity Desired Acceleration Set Time-Headway Set Maximum-Speed Upper level controller Fault injection block Engine torque Desired Acceleration Brake pedal position Lower level controller Unwanted acceleration Speed failure Complete brake failure Partial brake failure
10 Participants 48 participants 33 men and 15 women between 25 and 59 years of age annual driving distance more than 5000 km no experienced ACC users
11 Scenario A: Unwanted acceleration Car in front drives at 105 kph (65 mph), ACC in ego car accelerates unintentionally towards vehicle ahead (fails to keep the set distance and speed) Fails to follow leader with a 2 second time gap Braking or steering required to avoid collision


12 Scenario B&C: Complete and partial brake failure B: Car in front brakes, ACC in ego car does not brake C: Car in front brakes, ACC in ego car brakes less than necessary to avoid a collision Braking or steering required to avoid collision
13 Scenario D: Speed limit violation Car in front accelerates above speed limit, ACC in ego car also accelerates keeping set distance (2s) but fails to keep set speed limit (110 kph) Following leader with a 2 second time-gap Braking required 110 to avoid speeding
14 Design Order of scenarios Subjects n = 4 Practice A B n = 4 Practice B A n = 4 Practice A C n = 4 Practice C A n = 4 Practice A D n = 4 Practice D A n = 4 Practice B C n = 4 Practice C B n = 4 Practice B D n = 4 Practice D B n = 4 Practice C D n = 4 Practice D C * A=B=C=D=Experimental scenario including experimental situation and preceding baseline ** N = 48 *** n = 24 for each experimental scenario
15 RESULTS

16 The drivers available strategies when system fails

17 Scenario A: Ego car accelerates unintentionally No collisions Majority used steering One third slowed down Six braked One turned off the ACC using the button Three drivers got the vehicle unstable which automatically aborted the experiment


18 Scenario B&C: Brake failures Both brake failures caused collisions Partial brake failure caused more collisions than complete failure But with lower impact speed (36 kph vs. 82 kph)! Changing lane most common for drivers with successful outcome Complete brake failure Partial brake failure

19 Scenario D: Ego car accelerates keeping the set distance but fails to keep the set speed limit Eight drivers did nothing within 30 seconds of speeds above 110 kph Braking more common than pressing the ACC on/off button

20 Conclusions More drivers changed lane than braked to acceleration and brake failures But note that drivers were always free to change lane Collisions only occurred in scenarios with brake failures More collisions for partial brake failure than for complete brake failure However, impact speed was less for partial brake failure Comparing brake failures: Higher controllability for complete brake failure (fewer collisions) Lower severity for partial brake failure (lower impact speed) Risk = Exposure x Controllability x Severity
21 Thanks for your kind attention! Questions?
DRIVING. Honda Sensing *
 Honda Sensing * Honda Sensing is a driver support system which employs the use of two distinctly different kinds of sensors, a radar sensor located at the lower part of the front bumper and a front sensor
Honda Sensing * Honda Sensing is a driver support system which employs the use of two distinctly different kinds of sensors, a radar sensor located at the lower part of the front bumper and a front sensor
Tomi Igun (240) October 15, 2008
 October 15, 2008") Howard Chrysler Projects: High Level Functional Descriptions on Adaptive Cruise Control (ACC) Lane Departure Warning (LDW) Automated Map Follower (AMF) Tomi Igun ooi@chrysler.com (240)593 6576 October
Howard Chrysler Projects: High Level Functional Descriptions on Adaptive Cruise Control (ACC) Lane Departure Warning (LDW) Automated Map Follower (AMF) Tomi Igun ooi@chrysler.com (240)593 6576 October
PILOTING AUTOMATED DRIVING ON EUROPEAN ROADS. Aria Etemad Volkswagen Group Research
 Piloting Automated Driving on European Roads PILOTING AUTOMATED DRIVING ON EUROPEAN ROADS Aria Etemad Volkswagen Group Research From 3 to 0 BMWi-BMBF Conference 2017, Berlin 2 From eurofot to L3Pilot L3Pilot
Piloting Automated Driving on European Roads PILOTING AUTOMATED DRIVING ON EUROPEAN ROADS Aria Etemad Volkswagen Group Research From 3 to 0 BMWi-BMBF Conference 2017, Berlin 2 From eurofot to L3Pilot L3Pilot
Dr. Mohamed Abdel-Aty, P.E. Connected-Autonomous Vehicles (CAV): Background and Opportunities. Trustee Chair
: Background and Opportunities. Trustee Chair") Connected-Autonomous Vehicles (CAV): Background and Opportunities Dr. Mohamed Abdel-Aty, P.E. Trustee Chair Pegasus Professor Chair, Dept. of Civil, Environmental & Construction Engineering University
Connected-Autonomous Vehicles (CAV): Background and Opportunities Dr. Mohamed Abdel-Aty, P.E. Trustee Chair Pegasus Professor Chair, Dept. of Civil, Environmental & Construction Engineering University
Fleet Penetration of Automated Vehicles: A Microsimulation Analysis
 Fleet Penetration of Automated Vehicles: A Microsimulation Analysis Corresponding Author: Elliot Huang, P.E. Co-Authors: David Stanek, P.E. Allen Wang 2017 ITE Western District Annual Meeting San Diego,
Fleet Penetration of Automated Vehicles: A Microsimulation Analysis Corresponding Author: Elliot Huang, P.E. Co-Authors: David Stanek, P.E. Allen Wang 2017 ITE Western District Annual Meeting San Diego,
Energy ITS: What We Learned and What We should Learn
 Energy ITS: What We Learned and What We should Learn July 25, 2012 TRB Road Vehicle Automation Workshop Sadayuki Tsugawa, Dr. Eng. NEDO Energy ITS Project Leader Professor, Department of Information Engineering
Energy ITS: What We Learned and What We should Learn July 25, 2012 TRB Road Vehicle Automation Workshop Sadayuki Tsugawa, Dr. Eng. NEDO Energy ITS Project Leader Professor, Department of Information Engineering
A factsheet on the safety technology in Volvo s 90 Series cars
 A factsheet on the safety technology in Volvo s 90 Series cars 90 Series Safety System overview Options IntelliSafe Surround: Blind Spot Information (BLIS) Rear Collision Warning (with braking at stand
A factsheet on the safety technology in Volvo s 90 Series cars 90 Series Safety System overview Options IntelliSafe Surround: Blind Spot Information (BLIS) Rear Collision Warning (with braking at stand
Technologies avancées de securité pour le transport publique routier Advanced safety technologies for road public transport
 المنتدى العالمي» الشباب سفراء السالمة على الطرقات 13 ième Congrès Mondial de la Prévention Routière Internationale 13 th World Congress of the International Road Prevention Tunis 2017 Technologies avancées
المنتدى العالمي» الشباب سفراء السالمة على الطرقات 13 ième Congrès Mondial de la Prévention Routière Internationale 13 th World Congress of the International Road Prevention Tunis 2017 Technologies avancées
Press Information. Volvo Car Group. Originator Malin Persson, Date of Issue
 Volvo Car Group Public Affairs PVH50 SE-405 31 Göteborg, Sweden Telephone +46 31 59 65 25 Fax +46 31 54 40 64 www.media.volvocars.com Press Information Originator Malin Persson, malin.persson@volvocars.com
Volvo Car Group Public Affairs PVH50 SE-405 31 Göteborg, Sweden Telephone +46 31 59 65 25 Fax +46 31 54 40 64 www.media.volvocars.com Press Information Originator Malin Persson, malin.persson@volvocars.com
A factsheet on Volvo Cars safety technology in the new Volvo S90
 A factsheet on Volvo Cars safety technology in the new Volvo S90 S90 Safety System overview Package IntelliSafe Pro IntelliSafe Surround IntelliSafe Assist Options IntelliSafe Surround: Blind Spot Information
A factsheet on Volvo Cars safety technology in the new Volvo S90 S90 Safety System overview Package IntelliSafe Pro IntelliSafe Surround IntelliSafe Assist Options IntelliSafe Surround: Blind Spot Information
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications
 Systems: Architectures, Controls, and Applications") A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
AN ANALYSIS OF DRIVER S BEHAVIOR AT MERGING SECTION ON TOKYO METOPOLITAN EXPRESSWAY WITH THE VIEWPOINT OF MIXTURE AHS SYSTEM
 AN ANALYSIS OF DRIVER S BEHAVIOR AT MERGING SECTION ON TOKYO METOPOLITAN EXPRESSWAY WITH THE VIEWPOINT OF MIXTURE AHS SYSTEM Tetsuo Shimizu Department of Civil Engineering, Tokyo Institute of Technology
AN ANALYSIS OF DRIVER S BEHAVIOR AT MERGING SECTION ON TOKYO METOPOLITAN EXPRESSWAY WITH THE VIEWPOINT OF MIXTURE AHS SYSTEM Tetsuo Shimizu Department of Civil Engineering, Tokyo Institute of Technology
Aria Etemad Volkswagen Group Research. Key Results. Aachen 28 June 2017
 Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
eurofot - European Large-Scale Field Operational Test on In-Vehicle Systems
 eurofot - European Large-Scale Field Operational Test on In-Vehicle Systems 4. Tagung Sicherheit durch Fahrerassistenz 15./16. April 2010, München Aria Etemad, Christoph Kessler Ford Research & Advanced
eurofot - European Large-Scale Field Operational Test on In-Vehicle Systems 4. Tagung Sicherheit durch Fahrerassistenz 15./16. April 2010, München Aria Etemad, Christoph Kessler Ford Research & Advanced
State-of-the-Art and Future Trends in Testing of Active Safety Systems
 State-of-the-Art and Future Trends in Testing of Active Safety Systems Empirical Study Results with the Swedish Alessia Knauss (Chalmers), Christian Berger (GU), and Henrik Eriksson (SP) A-TEAM project
State-of-the-Art and Future Trends in Testing of Active Safety Systems Empirical Study Results with the Swedish Alessia Knauss (Chalmers), Christian Berger (GU), and Henrik Eriksson (SP) A-TEAM project
Safe Transitions to Manual Driving From Faulty Automated Driving System
 Thesis for the Degree of Doctor of Philosophy Safe Transitions to Manual Driving From Faulty Automated Driving System Josef Nilsson Department of Signals and Systems Chalmers University of Technology Gothenburg,
Thesis for the Degree of Doctor of Philosophy Safe Transitions to Manual Driving From Faulty Automated Driving System Josef Nilsson Department of Signals and Systems Chalmers University of Technology Gothenburg,
SIMULATING A CAR CRASH WITH A CAR SIMULATOR FOR THE PEOPLE WITH MOBILITY IMPAIRMENTS
 International Journal of Modern Manufacturing Technologies ISSN 2067 3604, Vol. VI, No. 1 / 2014 SIMULATING A CAR CRASH WITH A CAR SIMULATOR FOR THE PEOPLE WITH MOBILITY IMPAIRMENTS Waclaw Banas 1, Krzysztof
International Journal of Modern Manufacturing Technologies ISSN 2067 3604, Vol. VI, No. 1 / 2014 SIMULATING A CAR CRASH WITH A CAR SIMULATOR FOR THE PEOPLE WITH MOBILITY IMPAIRMENTS Waclaw Banas 1, Krzysztof
Implementation and Evaluation of Lane Departure Warning and Assistance Systems
 Implementation and Evaluation of Lane Departure Warning and Assistance Systems Emma Johansson*, Erik Karlsson*, Christian Larsson* and Lars Eriksson** * (prev. Volvo Technology) Gothenburg, Sweden **VTI,
Implementation and Evaluation of Lane Departure Warning and Assistance Systems Emma Johansson*, Erik Karlsson*, Christian Larsson* and Lars Eriksson** * (prev. Volvo Technology) Gothenburg, Sweden **VTI,
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
Advanced Traffic Management on Arterial Corridors with Connected and Automated Vehicles
 Advanced Traffic Management on Arterial Corridors with Connected and Automated Vehicles Outline: November 18, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental Research and Technology
Advanced Traffic Management on Arterial Corridors with Connected and Automated Vehicles Outline: November 18, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental Research and Technology
ADVANCED EMERGENCY BRAKING SYSTEM (AEBS) DISCLAIMER
 DISCLAIMER") ADVANCED EMERGENCY BRAKING SYSTEM (AEBS) DISCLAIMER OnGuardACTIVETM Disclaimer WABCO s advanced emergency braking system (AEBS) with active braking on moving, stopping and stationary vehicles OnGuardACTIVE
ADVANCED EMERGENCY BRAKING SYSTEM (AEBS) DISCLAIMER OnGuardACTIVETM Disclaimer WABCO s advanced emergency braking system (AEBS) with active braking on moving, stopping and stationary vehicles OnGuardACTIVE
SAFERIDER Project FP SAFERIDER Andrea Borin November 5th, 2010 Final Event & Demonstration Leicester, UK
 SAFERIDER Project FP7-216355 SAFERIDER Advanced Rider Assistance Systems Andrea Borin andrea.borin@ymre.yamaha-motor.it ARAS: Advanced Rider Assistance Systems Speed Alert Curve Frontal Collision Intersection
SAFERIDER Project FP7-216355 SAFERIDER Advanced Rider Assistance Systems Andrea Borin andrea.borin@ymre.yamaha-motor.it ARAS: Advanced Rider Assistance Systems Speed Alert Curve Frontal Collision Intersection
Vehicle Dynamics Models for Driving Simulators
 Vehicle Dynamics Models for Driving Simulators Thomas D. Gillespie, Director of Product Planning Mechanical Simulation Corporation Agenda Introduction to Mechanical Simulation Vehicle dynamics simulation
Vehicle Dynamics Models for Driving Simulators Thomas D. Gillespie, Director of Product Planning Mechanical Simulation Corporation Agenda Introduction to Mechanical Simulation Vehicle dynamics simulation
Adaptive cruise control (ACC)
") Adaptive cruise control (ACC) PRINCIPLE OF OPERATION WARNING Adaptive Cruise Control is not a collision warning or avoidance system. Additionally, Adaptive Cruise Control will not detect: stationary or
Adaptive cruise control (ACC) PRINCIPLE OF OPERATION WARNING Adaptive Cruise Control is not a collision warning or avoidance system. Additionally, Adaptive Cruise Control will not detect: stationary or
Injuries from Motor Vehicle Crashes 48,000 46,000
 Trillion Vehicle- Miles Traveled Annual fatalities from MVC Fatalities/ 100 million miles 8/5/2013 New Vehicle Safety Technologies Kathleen D. Klinich Injuries from Motor Vehicle Crashes 48,000 46,000
Trillion Vehicle- Miles Traveled Annual fatalities from MVC Fatalities/ 100 million miles 8/5/2013 New Vehicle Safety Technologies Kathleen D. Klinich Injuries from Motor Vehicle Crashes 48,000 46,000
AdaptIVe: Automated driving applications and technologies for intelligent vehicles
 Jens Langenberg Aachen 06 October 2015 AdaptIVe: Automated driving applications and technologies for intelligent vehicles Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration: 42
Jens Langenberg Aachen 06 October 2015 AdaptIVe: Automated driving applications and technologies for intelligent vehicles Facts Budget: European Commission: EUR 25 Million EUR 14,3 Million Duration: 42
Joey Nunn Corporate Government Manager, Southeast US Ken Germano Director of Fleet Management, SC Bryan Jolliff Finance Manager, SC
 Joey Nunn Corporate Government Manager, Southeast US Ken Germano Director of Fleet Management, SC Bryan Jolliff Finance Manager, SC Common Themes in Municipal Government Reduced Revenue Increased Expenses
Joey Nunn Corporate Government Manager, Southeast US Ken Germano Director of Fleet Management, SC Bryan Jolliff Finance Manager, SC Common Themes in Municipal Government Reduced Revenue Increased Expenses
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Driver Performance in a Cooperative Adaptive Cruise Control String
 Proceedings of the Human Factors and Ergonomics Society 2016 Annual Meeting 1184 Driver Performance in a Cooperative Adaptive Cruise Control String Vaughan W. Inman 1, Steven Jackson 1, Brian H. Philips
Proceedings of the Human Factors and Ergonomics Society 2016 Annual Meeting 1184 Driver Performance in a Cooperative Adaptive Cruise Control String Vaughan W. Inman 1, Steven Jackson 1, Brian H. Philips
Integration of Electronically Controlled Systems (ECSS) Dr. Thomas Aubel
 Dr. Thomas Aubel") Integration of Electronically Controlled Systems (ECSS) into PTI Dr. Thomas Aubel 2 Sustainability: Definition Four Coordinates Intergenerational Fairness Global Responsibility Quality of Life Social Cohesion
Integration of Electronically Controlled Systems (ECSS) into PTI Dr. Thomas Aubel 2 Sustainability: Definition Four Coordinates Intergenerational Fairness Global Responsibility Quality of Life Social Cohesion
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System
 System") Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Truck Safety Applications for Cost- Efficient Laser Scanner Sensors Grant Grubb, Volvo Trucks, Sweden
 Truck Safety Applications for Cost- Efficient Laser Scanner Sensors Grant Grubb, Volvo Trucks, Sweden Overview 1. Introduction 2. Relevant Detection Regions 3. Truck Applications a. Start Inhibit b. Right-turn
Truck Safety Applications for Cost- Efficient Laser Scanner Sensors Grant Grubb, Volvo Trucks, Sweden Overview 1. Introduction 2. Relevant Detection Regions 3. Truck Applications a. Start Inhibit b. Right-turn
Can STPA contribute to identify hazards of different natures and improve safety of automated vehicles?
 Can STPA contribute to identify hazards of different natures and improve safety of automated vehicles? Stephanie Alvarez, Franck Guarnieri & Yves Page (MINES ParisTech, PSL Research University and RENAULT
Can STPA contribute to identify hazards of different natures and improve safety of automated vehicles? Stephanie Alvarez, Franck Guarnieri & Yves Page (MINES ParisTech, PSL Research University and RENAULT
Assessment of driver fitness: An alcohol calibration study in a high-fidelity simulation 26 April 2013
 Assessment of driver fitness: An alcohol calibration study in a high-fidelity simulation 26 April 2013 Dr. Yvonne Kaussner WIVW Wuerzburg Institute for Traffic Sciences Methodological issues on the assessment
Assessment of driver fitness: An alcohol calibration study in a high-fidelity simulation 26 April 2013 Dr. Yvonne Kaussner WIVW Wuerzburg Institute for Traffic Sciences Methodological issues on the assessment
ASSEMBLY BILL No. 87. Introduced by Assembly Member Ting (Coauthor: Assembly Member Nazarian) January 5, 2017
 January 5, 2017") california legislature 2017 18 regular session ASSEMBLY BILL No. 87 Introduced by Assembly Member Ting (Coauthor: Assembly Member Nazarian) January 5, 2017 An act to amend Section 38750 of the Vehicle
california legislature 2017 18 regular session ASSEMBLY BILL No. 87 Introduced by Assembly Member Ting (Coauthor: Assembly Member Nazarian) January 5, 2017 An act to amend Section 38750 of the Vehicle
Advanced Vehicle Control System Development Div.
 Autonomous Driving Technologies for Advanced Driver Assist System Toyota Motor Corporation Advanced Vehicle Control System Development Div. Hiroyuki KANEMITSU Contents 1. Definition of automated driving.
Autonomous Driving Technologies for Advanced Driver Assist System Toyota Motor Corporation Advanced Vehicle Control System Development Div. Hiroyuki KANEMITSU Contents 1. Definition of automated driving.
Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches. Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron
 Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron 1 Agenda Part1. ADAS Sensor Fusion HILS Trend 1.1 The trend of ADAS
Integrated ADAS HIL System with the Combination of CarMaker and Various ADAS Test Benches Jinjong Lee, Konrad Yu-Mi Song, Hyundai-Autron 1 Agenda Part1. ADAS Sensor Fusion HILS Trend 1.1 The trend of ADAS
Traffic Operations with Connected and Automated Vehicles
 Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
Partial Automation for Truck Platooning
 Partial Automation for Truck Platooning Observations and Lessons Learned to Date from California's Experience with Truck Platooning Matt Hanson 2017 ITS CA Conference September 18, 2017 Burlingame, CA
Partial Automation for Truck Platooning Observations and Lessons Learned to Date from California's Experience with Truck Platooning Matt Hanson 2017 ITS CA Conference September 18, 2017 Burlingame, CA
Adaptive cruise control (ACC)
") Adaptive cruise control (ACC) PRINCIPLE OF OPERATION E94163 It is the drivers responsibility to stay alert, drive safely and be in control of the vehicle at all times. Keep the front of the vehicle free
Adaptive cruise control (ACC) PRINCIPLE OF OPERATION E94163 It is the drivers responsibility to stay alert, drive safely and be in control of the vehicle at all times. Keep the front of the vehicle free
VTI särtryck. afety Effects of Adaptive Cruise Controls in Critical Traffic Situations
 VTI särtryck o. 265 ' 1996 afety Effects of Adaptive Cruise Controls in Critical Traffic Situations ena Nilsson eprint from proceedings of Steps Forward, Volume III, the Second World Congress on Intelligent
VTI särtryck o. 265 ' 1996 afety Effects of Adaptive Cruise Controls in Critical Traffic Situations ena Nilsson eprint from proceedings of Steps Forward, Volume III, the Second World Congress on Intelligent
Use, Learning and Perceptions of In-Vehicle Technologies, and Vehicle Adaptations among Older Drivers: A LongROAD Study
 RESEARCH BRIEF Use, Learning and Perceptions of In-Vehicle Technologies, and Vehicle This research examined older drivers use of and attitudes toward 15 in-vehicle technologies and 12 aftermarket vehicle
RESEARCH BRIEF Use, Learning and Perceptions of In-Vehicle Technologies, and Vehicle This research examined older drivers use of and attitudes toward 15 in-vehicle technologies and 12 aftermarket vehicle
Draft Autonomous Vehicles Legislation for Washington State. Provisions
 Draft Autonomous Vehicles Legislation for Washington State Introduction This draft legislation was researched and written by the University of Washington s Technology Law and Policy Clinic at the request
Draft Autonomous Vehicles Legislation for Washington State Introduction This draft legislation was researched and written by the University of Washington s Technology Law and Policy Clinic at the request
Functional Safety Analysis of Automated Vehicle Lane Centering Control Systems. Volpe The National Transportation Systems Center
 Functional Safety Analysis of Automated Vehicle Lane Centering Control Systems John Brewer and Wassim Najm Volpe National Transportation Systems Center July 22, 2015 Volpe The National Transportation Systems
Functional Safety Analysis of Automated Vehicle Lane Centering Control Systems John Brewer and Wassim Najm Volpe National Transportation Systems Center July 22, 2015 Volpe The National Transportation Systems
Autonomous Automated and Connected Vehicles
 Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Postprint.
 http://www.diva-portal.org Postprint This is the accepted version of a paper presented at 17 IEEE th International Conference on Intelligent Transportation Systems (ITSC), Kanagawa, Japan, 16-19 October,
http://www.diva-portal.org Postprint This is the accepted version of a paper presented at 17 IEEE th International Conference on Intelligent Transportation Systems (ITSC), Kanagawa, Japan, 16-19 October,
DRIVERS PERCEPTION OF AND RESPONSE TO BRAKE FAILURE
 DRIVERS PERCEPTION OF AND RESPONSE TO BRAKE FAILURE Hamish Jamson* and Paul Smith *Institute for Transport Studies School of Psychology University of Leeds Leeds, U.K. E-mail: hamish@psyc.leeds.ac.uk Summary:
DRIVERS PERCEPTION OF AND RESPONSE TO BRAKE FAILURE Hamish Jamson* and Paul Smith *Institute for Transport Studies School of Psychology University of Leeds Leeds, U.K. E-mail: hamish@psyc.leeds.ac.uk Summary:
Near-Term Automation Issues: Use Cases and Standards Needs
 Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Future Mobility & Machine Learning
 Future Mobility & Machine Learning Self-Driving Cars Intelligent Traffic Control Kim G Larsen Jakob H Taankvist, Marco Muniz, Andreas B Eriksen, Mikkel Færgeman, Marius Mikucions,.. DiCyPS Vision Day 2017
Future Mobility & Machine Learning Self-Driving Cars Intelligent Traffic Control Kim G Larsen Jakob H Taankvist, Marco Muniz, Andreas B Eriksen, Mikkel Færgeman, Marius Mikucions,.. DiCyPS Vision Day 2017
FORD FOCUS DECEMBER ONWARDS ALL VARIANTS
 FORD FOCUS DECEMBER 2018 - ONWARDS ALL VARIANTS 85% ADULT OCCUPANT PROTECTION VULNERABLE ROAD USER PROTECTION 87% CHILD OCCUPANT PROTECTION SAFETY ASSIST FORD FOCUS OVERVIEW The Ford Focus was introduced
FORD FOCUS DECEMBER 2018 - ONWARDS ALL VARIANTS 85% ADULT OCCUPANT PROTECTION VULNERABLE ROAD USER PROTECTION 87% CHILD OCCUPANT PROTECTION SAFETY ASSIST FORD FOCUS OVERVIEW The Ford Focus was introduced
WHITE PAPER Autonomous Driving A Bird s Eye View
 WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
WHITE PAPER www.visteon.com Autonomous Driving A Bird s Eye View Autonomous Driving A Bird s Eye View How it all started? Over decades, assisted and autonomous driving has been envisioned as the future
Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems
 Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems Podcar City 7 Symposium Emerging Transportation Technologies R&D George Mason University, October
Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems Podcar City 7 Symposium Emerging Transportation Technologies R&D George Mason University, October
A Preceding Vehicle Following System Based on Haptic Communication
 12th International Symposium on Advanced Vehicle Control September 22-26, 214 AVEC 14 2149298 A Preceding Vehicle Following System Based on Haptic Communication Shohei Ueda, Takahiro Wada, and Seiji Sugiyama
12th International Symposium on Advanced Vehicle Control September 22-26, 214 AVEC 14 2149298 A Preceding Vehicle Following System Based on Haptic Communication Shohei Ueda, Takahiro Wada, and Seiji Sugiyama
The Role of Vehicle Automation and Intelligent Transportation Systems in Sustainable Transportation
 The Role of Vehicle Automation and Intelligent Transportation Systems in Sustainable Transportation Barth Memorial Symposium May 15, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental
The Role of Vehicle Automation and Intelligent Transportation Systems in Sustainable Transportation Barth Memorial Symposium May 15, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental
HOLDEN ACADIA NOVEMBER ONWARDS ALL VARIANTS
 HOLDEN ACADIA NOVEMBER 2018 - ONWARDS ALL VARIANTS 94% ADULT OCCUPANT PROTECTION 74% VULNERABLE ROAD USER PROTECTION 87% CHILD OCCUPANT PROTECTION 86% SAFETY ASSIST HOLDEN ACADIA OVERVIEW The Holden Acadia
HOLDEN ACADIA NOVEMBER 2018 - ONWARDS ALL VARIANTS 94% ADULT OCCUPANT PROTECTION 74% VULNERABLE ROAD USER PROTECTION 87% CHILD OCCUPANT PROTECTION 86% SAFETY ASSIST HOLDEN ACADIA OVERVIEW The Holden Acadia
Platooning Enabled by ETSI ITS-G5 Communications: Fuel Efficiency Analysis
 Platooning Enabled by ETSI ITS-G5 Communications: Fuel Efficiency Analysis Nikita Lyamin, Alexey Vinel {nikita.lyamin, alexey.vinel}@hh.se Halmstad University 1 / 30 We make an attempt to evaluate the
Platooning Enabled by ETSI ITS-G5 Communications: Fuel Efficiency Analysis Nikita Lyamin, Alexey Vinel {nikita.lyamin, alexey.vinel}@hh.se Halmstad University 1 / 30 We make an attempt to evaluate the
Cruise control. Introduction WARNING. Indicator lights Cruise control operation. More information: In this section you ll find information about:
 Cruise control Introduction In this section you ll find information about: Indicator lights Cruise control operation The cruise control helps maintain an individually stored constant speed when driving
Cruise control Introduction In this section you ll find information about: Indicator lights Cruise control operation The cruise control helps maintain an individually stored constant speed when driving
C-ITS status in Europe and Outlook
 C-ITS status in Europe and Outlook Car 2 Car Communication Consortium ITU Seminar 7 th June 2018 Car 2 Car Communication Consortium Communication Technology Basis ITS-G5 Dedicated Short-Range Communication
C-ITS status in Europe and Outlook Car 2 Car Communication Consortium ITU Seminar 7 th June 2018 Car 2 Car Communication Consortium Communication Technology Basis ITS-G5 Dedicated Short-Range Communication
Vehicle Dynamics and Drive Control for Adaptive Cruise Vehicles
 Vehicle Dynamics and Drive Control for Adaptive Cruise Vehicles Dileep K 1, Sreepriya S 2, Sreedeep Krishnan 3 1,3 Assistant Professor, Dept. of AE&I, ASIET Kalady, Kerala, India 2Associate Professor,
Vehicle Dynamics and Drive Control for Adaptive Cruise Vehicles Dileep K 1, Sreepriya S 2, Sreedeep Krishnan 3 1,3 Assistant Professor, Dept. of AE&I, ASIET Kalady, Kerala, India 2Associate Professor,
COLLISION AVOIDANCE SYSTEM
 COLLISION AVOIDANCE SYSTEM PROTECT YOUR FLEET AND YOUR BOTTOM LINE WITH MOBILEYE. Our Vision. Your Safety. TM Mobileye. The World Leader In Collision Avoidance Systems. The road ahead can have many unforeseen
COLLISION AVOIDANCE SYSTEM PROTECT YOUR FLEET AND YOUR BOTTOM LINE WITH MOBILEYE. Our Vision. Your Safety. TM Mobileye. The World Leader In Collision Avoidance Systems. The road ahead can have many unforeseen
LAND ROVER DISCOVERY. ANCAP Safety Rating. ancap.com.au. Test Results Summary. This ANCAP safety rating applies to: Adult Occupant Protection.
 ANCAP afety Rating LAND RVER DICVERY (AUTRALIA: July 2017 - onwards) Test Results ummary. This ANCAP safety rating applies to: Make / Model Year Range Variant(s)* Vehicle Type Land Rover Discovery July
ANCAP afety Rating LAND RVER DICVERY (AUTRALIA: July 2017 - onwards) Test Results ummary. This ANCAP safety rating applies to: Make / Model Year Range Variant(s)* Vehicle Type Land Rover Discovery July
Új technológiák a közlekedésbiztonság jövőjéért
 Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Vehicle Safety Technologies 22 January Mr Bernard Tay President, AA Singapore & Chairman, Singapore Road Safety Council
 Vehicle Safety Technologies 22 January 2011 Mr Bernard Tay President, AA Singapore & Chairman, Singapore Road Safety Council Content Introduction Vehicle safety features commonly found in cars Advanced
Vehicle Safety Technologies 22 January 2011 Mr Bernard Tay President, AA Singapore & Chairman, Singapore Road Safety Council Content Introduction Vehicle safety features commonly found in cars Advanced
Siemens ADAS. Collision avoidance as the first step towards autonomous driving
 Siemens ADAS Collision avoidance as the first step towards autonomous driving siemens.com/mobility-services Advanced Driver Assistance Systems help to avoid collisions and represent the first step towards
Siemens ADAS Collision avoidance as the first step towards autonomous driving siemens.com/mobility-services Advanced Driver Assistance Systems help to avoid collisions and represent the first step towards
Acustomer calls and says that an ADVANCED DRIVER ASSISTANCE SYSTEMS WHAT YOU SHOULD KNOW ABOUT
 WHAT YOU SHOULD KNOW ABOUT ADVANCED DRIVER ASSISTANCE SYSTEMS BY BOB PATTENGALE The driving public may not be quite ready for Google s autonomous vehicle, but other advanced driver assistance systems,
WHAT YOU SHOULD KNOW ABOUT ADVANCED DRIVER ASSISTANCE SYSTEMS BY BOB PATTENGALE The driving public may not be quite ready for Google s autonomous vehicle, but other advanced driver assistance systems,
Methods and Metrics of Evaluation of an Automated Real-time Driver Warning System Transportation Research Board Paper No.
 Methods and Metrics of Evaluation of an Automated Real-time Driver Warning System Transportation Research Board Paper No. TRB 05-1423 C. Arthur MacCarley California Polytechnic State University San Luis
Methods and Metrics of Evaluation of an Automated Real-time Driver Warning System Transportation Research Board Paper No. TRB 05-1423 C. Arthur MacCarley California Polytechnic State University San Luis
State of the art in autonomous driving. German Aerospace Center DLR Institute of transportation systems
 DLR.de Chart 1 State of the art in autonomous driving German Aerospace Center DLR Institute of transportation systems Smart Cities Symposium Prague 2017 Dr.-Ing. Reza Dariani DLR.de Chart 2 DLR at a glance
DLR.de Chart 1 State of the art in autonomous driving German Aerospace Center DLR Institute of transportation systems Smart Cities Symposium Prague 2017 Dr.-Ing. Reza Dariani DLR.de Chart 2 DLR at a glance
Adaptive cruise control (ACC)
") Adaptive cruise control (ACC) PRINCIPLE OF OPERATION The Adaptive Cruise Control (ACC) system is designed to aid the driver to maintain a gap from the vehicle ahead or a set road speed if there is no slower
Adaptive cruise control (ACC) PRINCIPLE OF OPERATION The Adaptive Cruise Control (ACC) system is designed to aid the driver to maintain a gap from the vehicle ahead or a set road speed if there is no slower
AUTOMATED DRIVING IN EUROPE
 AUTOMATED DRIVING IN EUROPE SIP-ADUS WORKSHOP TOKYO 14.11.2017 DR. HELGE NEUNER HISTORY OF AUTOMATED DRIVING @ VOLKSWAGEN GROUP RESEARCH Stanley Junior PAUL (2005) (2007) (2007) icar HAVEit et Follow me!
AUTOMATED DRIVING IN EUROPE SIP-ADUS WORKSHOP TOKYO 14.11.2017 DR. HELGE NEUNER HISTORY OF AUTOMATED DRIVING @ VOLKSWAGEN GROUP RESEARCH Stanley Junior PAUL (2005) (2007) (2007) icar HAVEit et Follow me!
HOW DO DRIVERS BEHAVE IN A HIGHLY AUTOMATED CAR?
 HOW DO DRIVERS BEHAVE IN A HIGHLY AUTOMATED CAR? Natasha Merat and A. Hamish Jamson Institute for Transport Studies University of Leeds Leeds, UK E-mail: N.Merat@its.leeds.ac.uk Summary: This paper outlines
HOW DO DRIVERS BEHAVE IN A HIGHLY AUTOMATED CAR? Natasha Merat and A. Hamish Jamson Institute for Transport Studies University of Leeds Leeds, UK E-mail: N.Merat@its.leeds.ac.uk Summary: This paper outlines
}Trunk opener ~Electric Parking Brake
 Visual Index Dashboard and Other Controls u v w x y z { } upower window switches Door lock switches Door mirror controls vmemory buttons* whomelink buttons* xaccessory power socket y Wireless charger*
Visual Index Dashboard and Other Controls u v w x y z { } upower window switches Door lock switches Door mirror controls vmemory buttons* whomelink buttons* xaccessory power socket y Wireless charger*
FREQUENTLY ASKED QUESTIONS
 FREQUENTLY ASKED QUESTIONS THE MOBILEYE SYSTEM Mobileye is a collision avoidance system that alerts drivers to potentially dangerous situations. However, the system does not replace any functions drivers
FREQUENTLY ASKED QUESTIONS THE MOBILEYE SYSTEM Mobileye is a collision avoidance system that alerts drivers to potentially dangerous situations. However, the system does not replace any functions drivers
Feasibility of Using Advanced EDRs for Assessing Active Safety Systems
 Feasibility of Using Advanced EDRs for Assessing Active Safety Systems H. Clay Gabler Kristofer D. Kusano Virginia Tech 7 November 2013 Center for Injury Biomechanics COLLEGE of ENGINEERING C I B Challenge:
Feasibility of Using Advanced EDRs for Assessing Active Safety Systems H. Clay Gabler Kristofer D. Kusano Virginia Tech 7 November 2013 Center for Injury Biomechanics COLLEGE of ENGINEERING C I B Challenge:
Assessment of ACC and CACC systems using SUMO
 SUMO User Conference 2018 Simulating Autonomous and Intermodal Transport Systems Assessment of ACC and CACC systems using SUMO Center for Research & Technology Hellas, Hellenic Institute of Transport Kallirroi
SUMO User Conference 2018 Simulating Autonomous and Intermodal Transport Systems Assessment of ACC and CACC systems using SUMO Center for Research & Technology Hellas, Hellenic Institute of Transport Kallirroi
About Automated Driving Functions
 About Automated Driving Functions Scenarios & Challenges Luisa Andreone FCA, Centro Ricerche FIAT ERTRAC Annual Conference Brussel, March 2015 Vehicle automation scenarios EVOLUTION on the ground / with
About Automated Driving Functions Scenarios & Challenges Luisa Andreone FCA, Centro Ricerche FIAT ERTRAC Annual Conference Brussel, March 2015 Vehicle automation scenarios EVOLUTION on the ground / with
The Digital Future of Driving Dr. László Palkovics State Secretary for Education
 The Digital Future of Driving Dr. László Palkovics State Secretary for Education 1. WHAT IS THE CHALLENGE? What is the challenge? Mobility Challenges Inspirating factors for development 1 Zero Emission
The Digital Future of Driving Dr. László Palkovics State Secretary for Education 1. WHAT IS THE CHALLENGE? What is the challenge? Mobility Challenges Inspirating factors for development 1 Zero Emission
Platooning using p in SARTRE project Safe Road Train for the Environment
 Ricardo plc 2009 Platooning using 802.11p in SARTRE project Safe Road Train for the Environment Erik Nordin, Project Manager, Volvo GTT (Volvo Technology, VTEC) Dept: Vehicle Technology and Safety 2 Road
Ricardo plc 2009 Platooning using 802.11p in SARTRE project Safe Road Train for the Environment Erik Nordin, Project Manager, Volvo GTT (Volvo Technology, VTEC) Dept: Vehicle Technology and Safety 2 Road
The connected vehicle is the better vehicle!
 AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
THE HIGHWAY-CHAUFFEUR
 Motivation: - Highway-Chauffeur as an example for a conditional automated driving function (SAE level 3) - Standard scenarios, critical scenarios and automation-risks are the basis to fill the scenariodatabase
Motivation: - Highway-Chauffeur as an example for a conditional automated driving function (SAE level 3) - Standard scenarios, critical scenarios and automation-risks are the basis to fill the scenariodatabase
Citi's 2016 Car of the Future Symposium
 Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Citi's 2016 Car of the Future Symposium May 19 th, 2016 Frank Melzer President Electronics Saving More Lives Our Guiding Principles ALV-AuthorInitials/MmmYYYY/Filename - 2 Real Life Safety The Road to
Mac McCall VTTI Motorcycle Research Group September 28, 2017
 Motorcycle Crashes and Some Guidance to Avoid Them Mac McCall VTTI Motorcycle Research Group September 28, 2017 Innovation 2015 4,976 killed Why? 29X more likely than in cars per mile traveled 88,000 injured
Motorcycle Crashes and Some Guidance to Avoid Them Mac McCall VTTI Motorcycle Research Group September 28, 2017 Innovation 2015 4,976 killed Why? 29X more likely than in cars per mile traveled 88,000 injured
Chassis Systems Control Driver assistance systems How much support do German drivers want?
 Chassis Systems Control Driver assistance systems How much support do German drivers want? 2 Chassis Systems Control Bosch study on driver assistance systems 2012 Why do you need driver assistance? More
Chassis Systems Control Driver assistance systems How much support do German drivers want? 2 Chassis Systems Control Bosch study on driver assistance systems 2012 Why do you need driver assistance? More
MAZDA CX-8 JULY ONWARDS ALL VARIANTS
 MAZDA CX-8 JULY 2018 - ONWARDS ALL VARIANTS 96% ADULT OCCUPANT PROTECTION 72% VULNERABLE ROAD USER PROTECTION 87% CHILD OCCUPANT PROTECTION 73% SAFETY ASSIST MAZDA CX-8 OVERVIEW The Mazda CX-8 was introduced
MAZDA CX-8 JULY 2018 - ONWARDS ALL VARIANTS 96% ADULT OCCUPANT PROTECTION 72% VULNERABLE ROAD USER PROTECTION 87% CHILD OCCUPANT PROTECTION 73% SAFETY ASSIST MAZDA CX-8 OVERVIEW The Mazda CX-8 was introduced
EXTENDING PRT CAPABILITIES
 EXTENDING PRT CAPABILITIES Prof. Ingmar J. Andreasson* * Director, KTH Centre for Traffic Research and LogistikCentrum AB. Teknikringen 72, SE-100 44 Stockholm Sweden, Ph +46 705 877724; ingmar@logistikcentrum.se
EXTENDING PRT CAPABILITIES Prof. Ingmar J. Andreasson* * Director, KTH Centre for Traffic Research and LogistikCentrum AB. Teknikringen 72, SE-100 44 Stockholm Sweden, Ph +46 705 877724; ingmar@logistikcentrum.se
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Vehicle Dynamics and Control
 Rajesh Rajamani Vehicle Dynamics and Control Springer Contents Dedication Preface Acknowledgments v ix xxv 1. INTRODUCTION 1 1.1 Driver Assistance Systems 2 1.2 Active Stabiüty Control Systems 2 1.3 RideQuality
Rajesh Rajamani Vehicle Dynamics and Control Springer Contents Dedication Preface Acknowledgments v ix xxv 1. INTRODUCTION 1 1.1 Driver Assistance Systems 2 1.2 Active Stabiüty Control Systems 2 1.3 RideQuality
DETROIT ASSURANCE TM SUITE OF SAFETY SYSTEMS
 RADAR SYSTEM CAMERA SYSTEM DETROIT ASSURANCE TM SUITE OF SAFETY SYSTEMS New Cascadia Detroit Assurance 4.0 Cascadia Detroit Assurance 2.0 Detroit Assurance delivers exceptional control, protection, and
RADAR SYSTEM CAMERA SYSTEM DETROIT ASSURANCE TM SUITE OF SAFETY SYSTEMS New Cascadia Detroit Assurance 4.0 Cascadia Detroit Assurance 2.0 Detroit Assurance delivers exceptional control, protection, and
INSTRUMENT PANEL. Learn about the indicators, gauges, and displays related to driving the vehicle. Models with Driver Information Interface
 INSTRUMENT PANEL INSTRUMENT PANEL Learn about the indicators, gauges, and displays related to driving the vehicle. Models with Driver Information Interface 200 Menu 40 80 323.4 12 34 Indicators briefly
INSTRUMENT PANEL INSTRUMENT PANEL Learn about the indicators, gauges, and displays related to driving the vehicle. Models with Driver Information Interface 200 Menu 40 80 323.4 12 34 Indicators briefly
Pedalling into a driverless world: opportunities and threats
 John Parkin Professor of Transport Engineering John.parkin@uwe.ac.uk Pedalling into a driverless world: opportunities and threats International Cycling Conference, Mannheim 19 th to 21 st September 2017
John Parkin Professor of Transport Engineering John.parkin@uwe.ac.uk Pedalling into a driverless world: opportunities and threats International Cycling Conference, Mannheim 19 th to 21 st September 2017
18th ICTCT Workshop, Helsinki, October Technical feasibility of safety related driving assistance systems
 18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
VINCI Autoroutes Foundation
 REPORT CI2N Influence of a speed limiter and regulator on driving habits. Study conducted with the support of the VINCI Autoroutes Foundation for responsible driving André Dufour & Olivier Després 01/09/2013
REPORT CI2N Influence of a speed limiter and regulator on driving habits. Study conducted with the support of the VINCI Autoroutes Foundation for responsible driving André Dufour & Olivier Després 01/09/2013
Reducing speed: Why does it matter so much? Pay-as-you-speed an insurance initiative to reduce speed Anders Kullgren
 Reducing speed: Why does it matter so much? Pay-as-you-speed an insurance initiative to reduce speed Anders Kullgren Head of traffic safety research, Folksam Adj. Professor, Chalmers The road transport
Reducing speed: Why does it matter so much? Pay-as-you-speed an insurance initiative to reduce speed Anders Kullgren Head of traffic safety research, Folksam Adj. Professor, Chalmers The road transport
Intelligent Speed Adaptation The Past, Present and Future of driver assistance. Dave Marples
 Intelligent Speed Adaptation The Past, Present and Future of driver assistance Dave Marples dave.marples@technolution.eu /What is ISA? *technology to: * advise on * voluntarily control * mandatory control
Intelligent Speed Adaptation The Past, Present and Future of driver assistance Dave Marples dave.marples@technolution.eu /What is ISA? *technology to: * advise on * voluntarily control * mandatory control
Design and Calibration of the Jaguar XK Adaptive Cruise Control System. Tim Jagger MathWorks International Automotive Conference 2006
 Design and Calibration of the Jaguar XK Adaptive Cruise Control System Tim Jagger MathWorks International Automotive Conference 26 JAGUAR XK Page 3 ADAPTIVE CRUISE CONTROL(ACC) MODEL BASED CALIBRATION
Design and Calibration of the Jaguar XK Adaptive Cruise Control System Tim Jagger MathWorks International Automotive Conference 26 JAGUAR XK Page 3 ADAPTIVE CRUISE CONTROL(ACC) MODEL BASED CALIBRATION
Naturalistic Research on Powered Two-Wheelers. Martin Winkelbauer (KFV) Martin Donabauer (KFV) Alexander Pommer (KFV) Reinier Jansen (SWOV)
 Martin Donabauer (KFV) Alexander Pommer (KFV) Reinier Jansen (SWOV)") Naturalistic Research on Powered Two-Wheelers Martin Winkelbauer (KFV) Martin Donabauer (KFV) Alexander Pommer (KFV) Reinier Jansen (SWOV) 2017 03 07 UDRIVE Webinar Two worlds two populations 2 Typical
Naturalistic Research on Powered Two-Wheelers Martin Winkelbauer (KFV) Martin Donabauer (KFV) Alexander Pommer (KFV) Reinier Jansen (SWOV) 2017 03 07 UDRIVE Webinar Two worlds two populations 2 Typical
David Pickett [Volvo Car Australia]; [National Road Safety Forum 2
![David Pickett [Volvo Car Australia]; [National Road Safety Forum 2](/thumbs/89/98792326.jpg "David Pickett [Volvo Car Australia]; [National Road Safety Forum 2") 1 David Pickett [Volvo Car Australia]; [National Road Safety Forum 2 Volvo V40 Integrated Safety and Driver Support SYSTEMS CV-sensor (standard) City Safety Pre-prepared restraints Front radar + camera:
1 David Pickett [Volvo Car Australia]; [National Road Safety Forum 2 Volvo V40 Integrated Safety and Driver Support SYSTEMS CV-sensor (standard) City Safety Pre-prepared restraints Front radar + camera:
Development of Fuel-Efficient Driving Strategies for Adaptive Cruise Control
 Development of Fuel-Efficient Driving Strategies for Adaptive Cruise Control Mohammad Mamouei*, Ioannis Kaparias, George Halikias School of Engineering and Mathematical Sciences, City University London
Development of Fuel-Efficient Driving Strategies for Adaptive Cruise Control Mohammad Mamouei*, Ioannis Kaparias, George Halikias School of Engineering and Mathematical Sciences, City University London
Autofore. Study on the Future Options for Roadworthiness Enforcement in the European Union
 Study on the Future Options for Roadworthiness Enforcement in the European Union Agenda 1. Project background and structure 2. Recommendations 2010/2020 3. Case background current situation 4. Strategies
Study on the Future Options for Roadworthiness Enforcement in the European Union Agenda 1. Project background and structure 2. Recommendations 2010/2020 3. Case background current situation 4. Strategies
High efficient SI-engine with ultra high injection pressure Chalmers University]
![High efficient SI-engine with ultra high injection pressure Chalmers University]](/thumbs/81/82870381.jpg "High efficient SI-engine with ultra high injection pressure Chalmers University]") High efficient SI-engine with ultra high injection pressure [Research @ Chalmers University] Event; Energirelaterad forskning, 2017 Gothenburg, Sweden 5 th October 2017 Peter Granqvist President DENSO
High efficient SI-engine with ultra high injection pressure [Research @ Chalmers University] Event; Energirelaterad forskning, 2017 Gothenburg, Sweden 5 th October 2017 Peter Granqvist President DENSO