Office Automated Delivery Robot
|
|
|
- Felix Allen
- 6 years ago
- Views:
Transcription


1 13/12/2011 Office Automated Delivery Robot Gyu Han David Choi Jin Sun Ahn Hongbae Sam Park Kyu Seo Sam Lee Yongho Choi School of Engineering Science Simon Fraser University
2 Outline Introduction Hardware Software Business Aspects Future Developments Conclusion Review Questions Acknowledgements 2
3 Introduction - Our Team CEO - Gyu Han David Choi CTO - Jin Sun Ahn CFO - Hongbae Sam Park CMO - Kyu Seo Sam Lee COO - Yongho Choi 3
4 Introduction Objective To increase efficiency within office space. To save time thus cutting expenditures To aid in removing avoidable tasks such as delivering documents from department to department. Employees can focus on their tasks without leaving their stations. As a public secretary who can run errands for every worker. 4

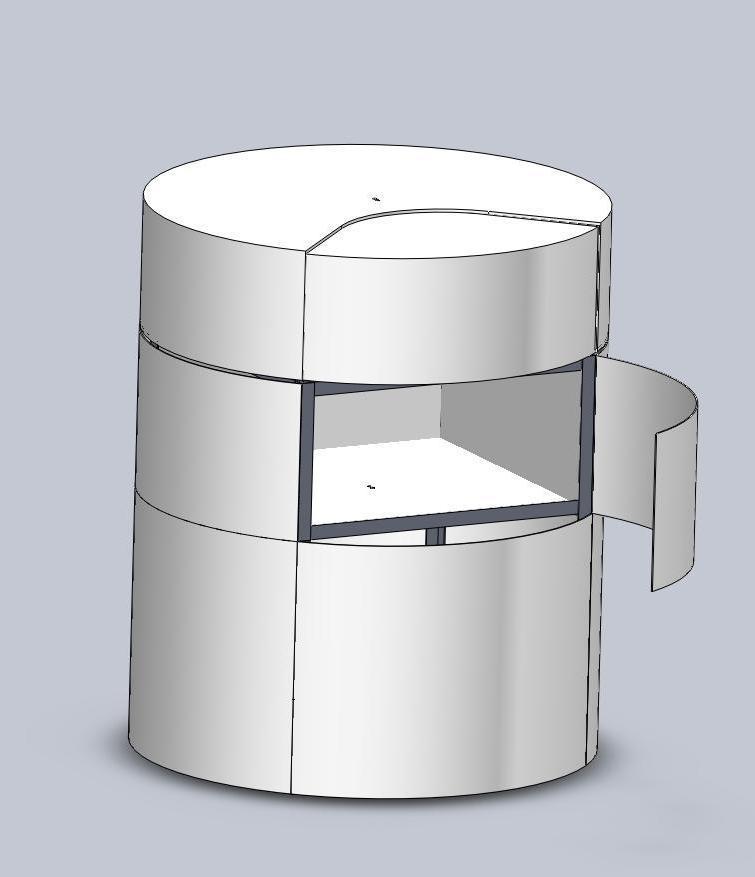
5 Introduction Initial Goal Conceptual Diagram 5
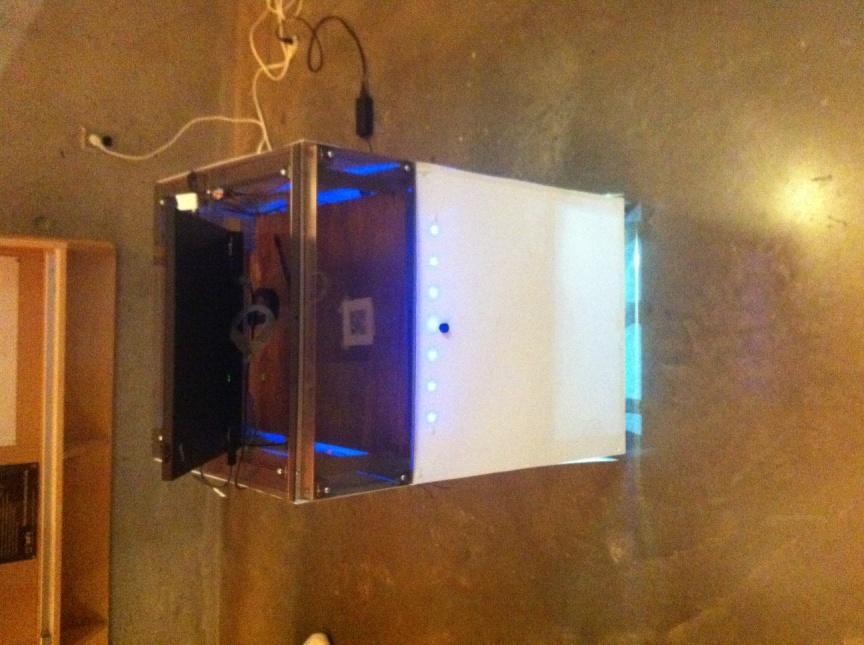

6 Introduction Actual Prototype Actual Picture 6
7 Hardware by Sam Park 7
8 Hardware Outline Chassis Drivetrain Lockable Door Proximity Sensor Microcontroller Power Supply Camera System Block Diagram 8

9 Hardware Chassis Conceptual Picture 9
10 Hardware Drive-train Motors (AME-214) Automotive Windshield Wiper Motor Wheels 4 heavy duty rubber wheels with ½ bearings, and 19-teeth sprocket Wheel Mounts Custom made composite wood structure which can accommodate ½ axles Gears 19 teeth sprocket linking wheels and Motors Chains 10
11 Hardware Lockable Door Opens after arrival at the destination Locks during operation for safety and security 11

12 Hardware Proximity Sensor LV-MaxSonar EZ1: MB1010 Collision detection 12

13 Hardware Microcontroller MICROCHIP dspic33fj64mc802 Serves as a drive motor controller, processes collision detection, communicates with database, also controls compartment door actuation motor 13

14 Hardware Power Supply 12 V Sealed Lead Acid Rechargeable Battery 14

15 Hardware Camera Microsoft LifeCam HD-3000 QR code scanning 15
16 Hardware System Block Diagram Actual Picture 16
17 Software by Sam Lee Jin Sun Ahn Yongho Choi 17
18 Software Outline User Interface Database QR Code Scanner Routing Algorithm Motor controller UART System Flow Chart 18
19 Software User Interface Website UI 19
20 Software Database Database structure Table Name : KAFEI_INFO Column Name ORDER_NUM ROBO_ARV ROBO_DES ROBO_STRT_DT Column Explanation Order sequence Starting station Destination station Order timestamp 20
21 Software QR Code Scanner QR Detecting + Decoding Process Camera Capture Image Detector QR code Detection Decoder QR code Decode OADR Process Route 21
22 Software QR Code Scanner QR Orientation Determination

23 Software Routing Algorithm Notation : (x,y) Destination Point -Starting Point i.e A -> B <0,1> -<0,0> = <0,-1> Move down to 1 23
24 Hardware + Software Communication Flow Chart Camera Software Motor Software Drivetrain UART (RS-232) Microcontroller 24
 to RS232 (MC)")
25 Software UART Sparkfun FTDI Breakout 5V DEV Communication between camera software and microcontroller USB (PC) to RS232 (MC) 25
26 Software Port Setup PC (C++): Boost open source library to setup the serial port, send data to microcontroller using USB to RS232 breakout Ex) write(port, buffer(char[0], 1)); MC (MPLAB): Register and port setup needed in order to receive the data Ex) RPINR18bits.U1RXr = 10; //U1RX pin setup U1MODEbits.UARTEN = 1; //Turn on UARTs 26
27 Software Motor Controller Based on route vector and orientation given by QR Code Scanner Motor Control Command Go : Proceed operation Right : Take a right turn Left : Take a left turn Spin : Take 180 turn Halt : Stop all operation 27
28 Software Motor Controller Situations where robot cannot go straight: Case 1 (one wheel covers more distance than the other wheel) 28
29 Software Motor Controller Situations where robot cannot go straight: Case 2 (Wheel floats; no contact with ground) 29
30 Software System Flow Chart User: Request Delivery Database: Acknowledge OADR OADR: Process Route Camera: Start Capturing OADR: Motor Control Camera: Capture Image OADR: Arrival Detector: QR code Detection Decoder: QR code Decode 30
31 Business Aspect Milestone Timeline Actual Cost 31

32 Business Aspect Milestone 32

33 Business Aspect Timeline Blue Line: Proposed Timeline Red Line: Actual Timeline 33
34 Business Aspect Actual Cost Equipment List1 Cost Webcam : Microsoft LifeCam HD-3000 $55 Microcontroller : MICROCHIP dspic33fj64mc802 $25 Proximity Sensor : LV-MaxSonar EZ1: MB1010 $30 Banebots FIRST CIM 12V 5280RPM Brushed DC Motor x 2 $50 Wheels x 2 $88 Motors $70 Aluminum Frame $ V Sealed Lead Acid Rechargeable Battery $45 UART Sparkfun FTDI Breakout 5V DEV $25 Misc. (including bolts, nuts, L-fame bridge, adapter) $150 Cosmetics $30 Total Cost $588 34
35 Future Development UI system on the robot Sensor inside Lockable door Password Keypad for manual disclose Rotating Compartment Extra items storage/delivery (i.e. coffee, beverages) 35
36 Conclusion Is adoptable anywhere Easy to use Can deliver various items Meet safety requirements Can be applicable variously 36
37 Acknowledgements Thanks to Andrew Rawicz Shahram Payandeh Gary Houghton Patrick Cho 37
38 Review Introduction Hardware Software Timeline Future Development Conclusion Review Acknowledgements Questions 38

39 Questions? 39
40 Demonstration 40
November 20, Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6
 November 20, 2011 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 Re: ENSC 305 Design Specification for an Office Automated Delivery Robot Dear Dr. Rawicz, Attached
November 20, 2011 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 Re: ENSC 305 Design Specification for an Office Automated Delivery Robot Dear Dr. Rawicz, Attached
EGG 101L INTRODUCTION TO ENGINEERING EXPERIENCE
 EGG 101L INTRODUCTION TO ENGINEERING EXPERIENCE LABORATORY 11: AUTOMATED CAR PROJECT DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING UNIVERSITY OF NEVADA, LAS VEGAS GOAL: This section combines the motor
EGG 101L INTRODUCTION TO ENGINEERING EXPERIENCE LABORATORY 11: AUTOMATED CAR PROJECT DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING UNIVERSITY OF NEVADA, LAS VEGAS GOAL: This section combines the motor
Final Report. James Buttice B.L.a.R.R. EEL 5666L Intelligent Machine Design Laboratory. Instructors: Dr. A Antonio Arroyo and Dr. Eric M.
 Final Report James Buttice B.L.a.R.R. EEL 5666L Intelligent Machine Design Laboratory Instructors: Dr. A Antonio Arroyo and Dr. Eric M. Schwartz Teaching Assistants: Mike Pridgen and Thomas Vermeer Table
Final Report James Buttice B.L.a.R.R. EEL 5666L Intelligent Machine Design Laboratory Instructors: Dr. A Antonio Arroyo and Dr. Eric M. Schwartz Teaching Assistants: Mike Pridgen and Thomas Vermeer Table
BASIC MECHATRONICS ENGINEERING
 MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY Lecture Summary on BASIC MECHATRONICS ENGINEERING NTA - 4 Mechatronics Engineering 2016 Page 1 INTRODUCTION TO MECHATRONICS Mechatronics is the field of study
MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY Lecture Summary on BASIC MECHATRONICS ENGINEERING NTA - 4 Mechatronics Engineering 2016 Page 1 INTRODUCTION TO MECHATRONICS Mechatronics is the field of study
RB-Mel-03. SCITOS G5 Mobile Platform Complete Package
 RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
RB-Mel-03 SCITOS G5 Mobile Platform Complete Package A professional mobile platform, combining the advatages of an industrial robot with the flexibility of a research robot. Comes with Laser Range Finder
Journal of Emerging Trends in Computing and Information Sciences
 Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
Pothole Detection Using Android Smartphone with a Video Camera 1 Youngtae Jo *, 2 Seungki Ryu 1 Korea Institute of Civil Engineering and Building Technology, Korea E-mail: 1 ytjoe@kict.re.kr, 2 skryu@kict.re.kr
J2VK Valvetronic Exhaust Control System
 Progress Report for J2VK Valvetronic Exhaust Control System Project members: Vincent Huang Kenny Sun Cheng Ou Justin Deng Contact Person: Cheng Ou jou@sfu.ca Submitted to: Dr. Andrew Rawicz - ENSC 440
Progress Report for J2VK Valvetronic Exhaust Control System Project members: Vincent Huang Kenny Sun Cheng Ou Justin Deng Contact Person: Cheng Ou jou@sfu.ca Submitted to: Dr. Andrew Rawicz - ENSC 440
Table of Contents. Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.
 Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg.") March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
March 5, 2015 0 P a g e Table of Contents Abstract... Pg. (2) Project Description... Pg. (2) Design and Performance... Pg. (3) OOM Block Diagram Figure 1... Pg. (4) OOM Payload Concept Model Figure 2...
PROJECT PROPOSAL FIRE FIGHTING ROBOT CHALLENGE THE ENGINEERS: SUBMITTED TO: SPONSORED BY: Micro Fire Extinguisher
 FIRE FIGHTING ROBOT CHALLENGE Micro Fire Extinguisher PROJECT PROPOSAL SUBMITTED TO: JOHN KENNEDY & R. LAL TUMMALA DESIGN CO. LTD, SAN DIEGO, CA SPONSORED BY: SAN DIEGO STATE UNIVERSITY SENIOR DESIGN PROJECT
FIRE FIGHTING ROBOT CHALLENGE Micro Fire Extinguisher PROJECT PROPOSAL SUBMITTED TO: JOHN KENNEDY & R. LAL TUMMALA DESIGN CO. LTD, SAN DIEGO, CA SPONSORED BY: SAN DIEGO STATE UNIVERSITY SENIOR DESIGN PROJECT
Design Specification and UI Interface for Automated Cart Delivery System
 Design Specification and UI Interface for Automated Cart Delivery System Project Team: Eason Tsai Benjamin Tsai Jacky Teng Contact Person: Benjamin Tsai syt8@sfu.ca Submitted to: Dr. Andrew Rawicz - ENSC
Design Specification and UI Interface for Automated Cart Delivery System Project Team: Eason Tsai Benjamin Tsai Jacky Teng Contact Person: Benjamin Tsai syt8@sfu.ca Submitted to: Dr. Andrew Rawicz - ENSC
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
IFC-BL02 Interface Free Controller Brushless Motor Card
 IFC-BL02 Interface Free Controller Brushless Motor Card User s Manual V1.1 Apr 2008 Information contained in this publication regarding device applications and the like is intended through suggestion only
IFC-BL02 Interface Free Controller Brushless Motor Card User s Manual V1.1 Apr 2008 Information contained in this publication regarding device applications and the like is intended through suggestion only
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
Princess Sumaya University for Technology
 IGVC2014-E500 Princess Sumaya University for Technology Hamza Al-Beeshawi, Enas Al-Zmaili Raghad Al-Harasis, Moath Shreim Jamille Abu Shash Faculty Name:Dr. Belal Sababha Email:b.sababha@psut.edu.jo I
IGVC2014-E500 Princess Sumaya University for Technology Hamza Al-Beeshawi, Enas Al-Zmaili Raghad Al-Harasis, Moath Shreim Jamille Abu Shash Faculty Name:Dr. Belal Sababha Email:b.sababha@psut.edu.jo I
THE ELECTRIC AUTOMOTIVE MOTOR CONTROL SYSTEM
 THE ELECTRIC AUTOMOTIVE MOTOR CONTROL SYSTEM Timothy E. Jackson Project Proposal October 30, 2003 ETec 471, Morton Western Washington University Department of Engineering Technology. INTRODUCTION In today
THE ELECTRIC AUTOMOTIVE MOTOR CONTROL SYSTEM Timothy E. Jackson Project Proposal October 30, 2003 ETec 471, Morton Western Washington University Department of Engineering Technology. INTRODUCTION In today
Initial Project and Group Identification Document. Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle)
") Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Initial Project and Group Identification Document Project Idea: Metal detecting robotic vehicle (seek and find metallic objects using a robotic vehicle) Team Members: Robertson Augustine (Computer Engineer)
Detailed Design Review
 Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
housevolve Garage Door Controller User Manual and Installation Guide
 housevolve Garage Door Controller User Manual and Installation Guide Introduction Thank you for purchasing a FREEVOLVE product. We designed it to provide you with years of reliable service. The following
housevolve Garage Door Controller User Manual and Installation Guide Introduction Thank you for purchasing a FREEVOLVE product. We designed it to provide you with years of reliable service. The following
PLC BASED AUTOMATIC RAILWAY GATE CONTROLLER AND OBSTACLE DETECTOR
 Plc Based Automatic Railway Gate Controller And Obstacle Detector 133 International Journal of Latest Trends in Engineering and Technology Vol.(9)Issue(3), pp.133-139 DOI: http://dx.doi.org/10.21172/1.93.23
Plc Based Automatic Railway Gate Controller And Obstacle Detector 133 International Journal of Latest Trends in Engineering and Technology Vol.(9)Issue(3), pp.133-139 DOI: http://dx.doi.org/10.21172/1.93.23
Fixing and Positioning of the Object Based on RFID Technology using Robotic Arm
 Fixing and Positioning of the Object Based on RFID Technology using Robotic Arm 1 M. Elango, 2 N.Arun Ram Kumar, 3 C.Kalyana Sundaram, 1,2 PG Student, 3 Assistant Professor 1,2,3 Dept. of Electronics And
Fixing and Positioning of the Object Based on RFID Technology using Robotic Arm 1 M. Elango, 2 N.Arun Ram Kumar, 3 C.Kalyana Sundaram, 1,2 PG Student, 3 Assistant Professor 1,2,3 Dept. of Electronics And
Solar Powered Golf Cart
 Solar Powered Golf Cart Group 9 Jake Bettis Jacob Krueger Matt Roland Matt Tourtelot Project Description The main objective of this project is to design and build a solar-powered, energy efficient electric
Solar Powered Golf Cart Group 9 Jake Bettis Jacob Krueger Matt Roland Matt Tourtelot Project Description The main objective of this project is to design and build a solar-powered, energy efficient electric
Syllabus: Automated, Connected, and Intelligent Vehicles
 Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Chapter 45 Adaptive Cars Headlamps System with Image Processing and Lighting Angle Control
 Chapter 45 Adaptive Cars Headlamps System with Image Processing and Lighting Angle Control William Tandy Prasetyo, Petrus Santoso and Resmana Lim Abstract The project proposed a prototype of an adaptive
Chapter 45 Adaptive Cars Headlamps System with Image Processing and Lighting Angle Control William Tandy Prasetyo, Petrus Santoso and Resmana Lim Abstract The project proposed a prototype of an adaptive
UNIVERSITÉ DE MONCTON FACULTÉ D INGÉNIERIE. Moncton, NB, Canada PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY
 FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
FACULTÉ D INGÉNIERIE PROJECT BREAKPOINT 2015 IGVC DESIGN REPORT UNIVERSITÉ DE MONCTON ENGINEERING FACULTY IEEEUMoncton Student Branch UNIVERSITÉ DE MONCTON Moncton, NB, Canada 15 MAY 2015 1 Table of Content
AXi-GMBOX1 INSTALLATION MANUAL
 AXi-GMBOX1 INSTALLATION MANUAL PLEASE REVIEW THIS INSTALLATION MANUAL CAREFULLY BEFORE BEGINNING ANY WORK COMPATIBLE PLUG & PLAY WIRING HARNESSES AXI-GM1-C AXI-GMMLX-C AXI-GMQUAD1-C AXI-GMDTS-C AXI-GMSTS-C
AXi-GMBOX1 INSTALLATION MANUAL PLEASE REVIEW THIS INSTALLATION MANUAL CAREFULLY BEFORE BEGINNING ANY WORK COMPATIBLE PLUG & PLAY WIRING HARNESSES AXI-GM1-C AXI-GMMLX-C AXI-GMQUAD1-C AXI-GMDTS-C AXI-GMSTS-C
RE: ENSC 440 Functional Specification for the Vehicle Lock-Out Prevention System
 Simon Fraser University. Burnaby, BC. V5A 1S6 Feb. 8, 2010 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 RE: ENSC 440 for the Vehicle Lock-Out Prevention System
Simon Fraser University. Burnaby, BC. V5A 1S6 Feb. 8, 2010 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 RE: ENSC 440 for the Vehicle Lock-Out Prevention System
Preliminary Design Report. Project Title: Lunabot
 EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 30 January 2012 Project Title: Lunabot Team Name: UF Lunabotics Team Members: Name: Matt Morgan Name: UF Lunabotics Team
EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 30 January 2012 Project Title: Lunabot Team Name: UF Lunabotics Team Members: Name: Matt Morgan Name: UF Lunabotics Team
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
2015 The MathWorks, Inc. 1 [Subtrack 2] Vehicle Dynamics Blockset 소개 김종헌부장 2015 The MathWorks, Inc. 2 Agenda What is Vehicle Dynamics Blockset? How can I use it? 3 Agenda What is Vehicle Dynamics Blockset?
Solar Panel Cubic Charger OMG Studio. ENSC 440/305 Project SFU Engineering Science
 Solar Panel Cubic Charger OMG Studio ENSC 440/305 Project SFU Engineering Science Dec 14, 2011 CEO Michael Chen Majors in Electronics Engineering Third Year Group Leader Directions Programming CFO Shuyang
Solar Panel Cubic Charger OMG Studio ENSC 440/305 Project SFU Engineering Science Dec 14, 2011 CEO Michael Chen Majors in Electronics Engineering Third Year Group Leader Directions Programming CFO Shuyang
Electronic Shifter. Lee Redstone V Lewis Weston V Jason Deglint V Group #5. Supervisor Ashoka K. S. Bhat. Due Oct.
 Electronic Shifter Lee Redstone V00662175 Lewis Weston V00766616 Jason Deglint V00730963 Group #5 Supervisor Ashoka K. S. Bhat Due Oct. 16, 2012 Dept. Electrical and Computer Engineering University of
Electronic Shifter Lee Redstone V00662175 Lewis Weston V00766616 Jason Deglint V00730963 Group #5 Supervisor Ashoka K. S. Bhat Due Oct. 16, 2012 Dept. Electrical and Computer Engineering University of
EGG 101L INTRODUCTION TO ENGINEERING EXPERIENCE
 EGG 101L INTRODUCTION TO ENGINEERING EXPERIENCE LABORATORY 8: DC MOTOR CONTROL DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING UNIVERSITY OF NEVADA, LAS VEGAS GOAL: This section will introduce DC motors
EGG 101L INTRODUCTION TO ENGINEERING EXPERIENCE LABORATORY 8: DC MOTOR CONTROL DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING UNIVERSITY OF NEVADA, LAS VEGAS GOAL: This section will introduce DC motors
Final Report 4/25/12. Project: Intelli-Shade. Team: Test Curtains Please Ignore
 EEL 4924 Electrical Engineering Design (Senior Design) Final Report 4/25/12 Project: Team: Test Curtains Please Ignore Team Members: Michael Feliciano Mark Heh Abstract: Our project is the design of an
EEL 4924 Electrical Engineering Design (Senior Design) Final Report 4/25/12 Project: Team: Test Curtains Please Ignore Team Members: Michael Feliciano Mark Heh Abstract: Our project is the design of an
Smart Home Renewable Energy Management System
 Available online at www.sciencedirect.com Energy Procedia 12 (2011) 120 126 ICSGCE 2011: 27 30 September 2011, Chengdu, China Smart Home Renewable Energy Management System A. R. Al-Ali *, Ayman El-Hag,
Available online at www.sciencedirect.com Energy Procedia 12 (2011) 120 126 ICSGCE 2011: 27 30 September 2011, Chengdu, China Smart Home Renewable Energy Management System A. R. Al-Ali *, Ayman El-Hag,
CommWeigh Axle Standard Module
 CommWeigh Axle Standard Module CommWeigh Axle Standard Module Background Businesses that transport heavy goods/material need to ensure that the loading of their vehicles is within the limits prescribed
CommWeigh Axle Standard Module CommWeigh Axle Standard Module Background Businesses that transport heavy goods/material need to ensure that the loading of their vehicles is within the limits prescribed
High Level Design ElecTrek
 High Level Design ElecTrek EE Senior Design November 9, 2010 Katie Heinzen Kathryn Lentini Neal Venditto Nicole Wehner Table of Contents 1 Introduction...3 2 Problem Statement and Proposed Solution...3
High Level Design ElecTrek EE Senior Design November 9, 2010 Katie Heinzen Kathryn Lentini Neal Venditto Nicole Wehner Table of Contents 1 Introduction...3 2 Problem Statement and Proposed Solution...3
Project Title: Wireless Hummer. ECE Final Written Report
 Project Title: Wireless Hummer ECE 792 - Final Written Report Project Team Members: Justin Audley, Blake Brown, Christopher Dean, Andrew Russell, Andrew Saunders ECE Faculty Advisor: Dr. Richard A. Messner
Project Title: Wireless Hummer ECE 792 - Final Written Report Project Team Members: Justin Audley, Blake Brown, Christopher Dean, Andrew Russell, Andrew Saunders ECE Faculty Advisor: Dr. Richard A. Messner
Energy Harvesting Platform
 Energy Harvesting Platform Group 8 S A N JAY K H E ML A NI T R AV I S B A D A L L K I A R A R O D R I G U EZ M I C H A EL L I N EE EE EE EE Motivation Non-renewable energy sources harm the environment
Energy Harvesting Platform Group 8 S A N JAY K H E ML A NI T R AV I S B A D A L L K I A R A R O D R I G U EZ M I C H A EL L I N EE EE EE EE Motivation Non-renewable energy sources harm the environment
Critical Design Report Presentation. Triton. Team 11 February 28, Department of Electrical and Computer Engineering
 Critical Design Report Presentation Triton Team 11 February 28, 2017 Introduction No economical solution for extended underwater monitoring Ecologists from UMass Amherst interested in studying spawning
Critical Design Report Presentation Triton Team 11 February 28, 2017 Introduction No economical solution for extended underwater monitoring Ecologists from UMass Amherst interested in studying spawning
Modeling and Simulate Automotive Powertrain Systems
 Modeling and Simulate Automotive Powertrain Systems Maurizio Dalbard 2015 The MathWorks, Inc. 1 Model-Based Design Challenges It s hard to do good Model-Based Design without good models Insufficient expertise
Modeling and Simulate Automotive Powertrain Systems Maurizio Dalbard 2015 The MathWorks, Inc. 1 Model-Based Design Challenges It s hard to do good Model-Based Design without good models Insufficient expertise
2018 KANSAS BEST BREAKOUT SESSIONS
 2018 KANSAS BEST BREAKOUT SESSIONS Tips for Building a Robot Bryan Jaax September 8, 2018 1 ST STEP: READ the RULES and Technical Data Package 2 FOLLOW AN ENGINEERING PROCESS Define the Problem Brainstorm:
2018 KANSAS BEST BREAKOUT SESSIONS Tips for Building a Robot Bryan Jaax September 8, 2018 1 ST STEP: READ the RULES and Technical Data Package 2 FOLLOW AN ENGINEERING PROCESS Define the Problem Brainstorm:
4WD & 6WD Wheelchair ATR Assembly Manual
 4WD & 6WD Wheelchair ATR Assembly Manual Follow this manual for assembly of the 4WD WC ATR and the 6WD WC ATR, as well as the 4WD and 6WD snowplow. The pictures in this manual are taken from any of these
4WD & 6WD Wheelchair ATR Assembly Manual Follow this manual for assembly of the 4WD WC ATR and the 6WD WC ATR, as well as the 4WD and 6WD snowplow. The pictures in this manual are taken from any of these
A Team-based ECET Capstone Project: Design and Implementation of a Solar Insolation Measurement System
 A Team-based ECET Capstone Project: Design and Implementation of a Solar Insolation Measurement System Abstract This paper describes an example of the successful design and implementation of a Portable
A Team-based ECET Capstone Project: Design and Implementation of a Solar Insolation Measurement System Abstract This paper describes an example of the successful design and implementation of a Portable
MIPRover: A Two-Wheeled Dynamically Balancing Mobile Inverted Pendulum Robot
 ECE 3992 Senior Project Proposal MIPRover: A Two-Wheeled Dynamically Balancing Mobile Inverted Pendulum Robot 6 May 2005 Prepared By: Kevin E. Waters Department of Electrical and Computer Engineering University
ECE 3992 Senior Project Proposal MIPRover: A Two-Wheeled Dynamically Balancing Mobile Inverted Pendulum Robot 6 May 2005 Prepared By: Kevin E. Waters Department of Electrical and Computer Engineering University
Smart Parking System Using Arduino Programming
 Smart Parking System Using Arduino Programming Ekanath 1, Adarsh V 2, Sreejith S 3, Vidya Kamath 4 1,2,3,4 Computer Science, Srinivas School of Engineering Abstract In our modern world where there is a
Smart Parking System Using Arduino Programming Ekanath 1, Adarsh V 2, Sreejith S 3, Vidya Kamath 4 1,2,3,4 Computer Science, Srinivas School of Engineering Abstract In our modern world where there is a
2016 IGVC Design Report Submitted: May 13, 2016
 2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
2016 IGVC Design Report Submitted: May 13, 2016 I certify that the design and engineering of the vehicle by the current student team has been significant and equivalent to what might be awarded credit
Performed by: Institute of Transportation Studies University of California, Irvine. Sponsored by: California Air Resources Board
 Performed by: Institute of Transportation Studies University of California, Irvine Sponsored by: California Air Resources Board Progress Meeting Dec 3rd, 2012 Outline Task Schedule Proposed Task Modifications
Performed by: Institute of Transportation Studies University of California, Irvine Sponsored by: California Air Resources Board Progress Meeting Dec 3rd, 2012 Outline Task Schedule Proposed Task Modifications
OPERATOR'S MANUAL CARRIER, CARGO, TRACKED, 1 /2 TON, M973 SMALL UNIT SUPPORT VEHICLE (SUSV) (NSN )
 (NSN )") OPERATOR'S MANUAL TABLE OF CONTENTS PAGE i EQUIPMENT DESCRIPTION PAGE 1-1 OPERATING INSTRUCTIONS PAGE 2-1 PREVENTIVE MAINTENANCE PAGE 2-6 CARRIER, CARGO, TRACKED, 1 /2 TON, M973 SMALL UNIT SUPPORT VEHICLE
OPERATOR'S MANUAL TABLE OF CONTENTS PAGE i EQUIPMENT DESCRIPTION PAGE 1-1 OPERATING INSTRUCTIONS PAGE 2-1 PREVENTIVE MAINTENANCE PAGE 2-6 CARRIER, CARGO, TRACKED, 1 /2 TON, M973 SMALL UNIT SUPPORT VEHICLE
Development and Fabrication of Electro Pneumatic Automatic Stamping Machine
 Development and Fabrication of Electro Pneumatic Automatic Stamping Machine Pawan Koppa 1, Dr.N.Nagaraja 2, Amith.V 3,Sushilendra Mutalikdesai 4,Vyasaraj.T 5,Gururaj Hatti 6 Pramod Kumar 7, Rohit Kumar
Development and Fabrication of Electro Pneumatic Automatic Stamping Machine Pawan Koppa 1, Dr.N.Nagaraja 2, Amith.V 3,Sushilendra Mutalikdesai 4,Vyasaraj.T 5,Gururaj Hatti 6 Pramod Kumar 7, Rohit Kumar
Experience the Hybrid Drive
 Experience the Hybrid Drive MAGNA STEYR equips SUV with hybrid drive Hybrid demo vehicle with dspace prototyping system To integrate components into a hybrid vehicle drivetrain, extensive modification
Experience the Hybrid Drive MAGNA STEYR equips SUV with hybrid drive Hybrid demo vehicle with dspace prototyping system To integrate components into a hybrid vehicle drivetrain, extensive modification
MiR Hook. Technical Documentation
 MiR Hook Technical Documentation Version 1.7 Software release 1.7 Release date: 10.11.2016 Table of contents 1 Introduction...3 2 The MiR Hook hardware...3 3 Trolley specifications...4 4 Space requirements...5
MiR Hook Technical Documentation Version 1.7 Software release 1.7 Release date: 10.11.2016 Table of contents 1 Introduction...3 2 The MiR Hook hardware...3 3 Trolley specifications...4 4 Space requirements...5
DESIGN DEVELOPMENT ENGINEERING TECHNOLOGY INDUSTRIALIZATION
 COMPANY INTRODUCTION DESIGN DEVELOPMENT ENGINEERING TECHNOLOGY INDUSTRIALIZATION Lukas Stary February 7, 2017 LUSTACO Group www.lustaco.com February 7, 2017 1 OUTLINE BASIC DESCRIPTION STYLING & DESIGN
COMPANY INTRODUCTION DESIGN DEVELOPMENT ENGINEERING TECHNOLOGY INDUSTRIALIZATION Lukas Stary February 7, 2017 LUSTACO Group www.lustaco.com February 7, 2017 1 OUTLINE BASIC DESCRIPTION STYLING & DESIGN
[Kadam*et al., 5(8):August, 2016] ISSN: IC Value: 3.00 Impact Factor: 4.116
![[Kadam*et al., 5(8):August, 2016] ISSN: IC Value: 3.00 Impact Factor: 4.116](/thumbs/90/103495984.jpg "[Kadam*et al., 5(8):August, 2016] ISSN: IC Value: 3.00 Impact Factor: 4.116") IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY VOICE GUIDED DRIVER ASSISTANCE SYSTEM BASED ON RASPBERRY-Pi Sonali Kadam, Sunny Surwade, S.S. Ardhapurkar* * Electronics and telecommunication
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY VOICE GUIDED DRIVER ASSISTANCE SYSTEM BASED ON RASPBERRY-Pi Sonali Kadam, Sunny Surwade, S.S. Ardhapurkar* * Electronics and telecommunication
Project Narrative Description
 0 Project Narrative Description Charge Spot is intended to demonstrate the feasibility of an autonomous electric vehicle charging system for residential use. The goal of Charge Spot is to have no user
0 Project Narrative Description Charge Spot is intended to demonstrate the feasibility of an autonomous electric vehicle charging system for residential use. The goal of Charge Spot is to have no user
Project Name: RoboFish Charging Station (RCS)
") Project Name: RoboFish Charging Station (RCS) Project Number: P17250 Project Family: P16029, P16229, P15029, P14029 Start Term: 2161 End Term: 2165 Team Members Jack Moore - Mechanical Engineering - Project
Project Name: RoboFish Charging Station (RCS) Project Number: P17250 Project Family: P16029, P16229, P15029, P14029 Start Term: 2161 End Term: 2165 Team Members Jack Moore - Mechanical Engineering - Project
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
AC : USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES
 AC 2011-2029: USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES Dr. Howard Medoff, Pennsylvania State University, Ogontz Campus Associate Professor of Engineering, Penn State Abington Research
AC 2011-2029: USE OF POWER WHEELS CAR TO ILLUSTRATE ENGI- NEERING PRINCIPLES Dr. Howard Medoff, Pennsylvania State University, Ogontz Campus Associate Professor of Engineering, Penn State Abington Research
Electronic Systems Research at CU-ICAR
 Electronic Systems Research at CU-ICAR Todd H. Hubing Michelin Professor of Vehicular Electronics Clemson University Automobiles are Complex Electronic Systems Navigation System Fuel Injection Engine Ignition
Electronic Systems Research at CU-ICAR Todd H. Hubing Michelin Professor of Vehicular Electronics Clemson University Automobiles are Complex Electronic Systems Navigation System Fuel Injection Engine Ignition
Active Suspension System. Josh Rose, Xander Serrurier, Rhydon Vassay, Chase Ramseyer Advisor: Steven Gutschlag 11/30/2016
 Active Suspension System Josh Rose, Xander Serrurier, Rhydon Vassay, Chase Ramseyer Advisor: Steven Gutschlag 11/30/2016 Suspension Systems Purpose The set of devices used to support the chassis of a vehicle
Active Suspension System Josh Rose, Xander Serrurier, Rhydon Vassay, Chase Ramseyer Advisor: Steven Gutschlag 11/30/2016 Suspension Systems Purpose The set of devices used to support the chassis of a vehicle
The Lug-n-Go. Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018
, Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018") The Lug-n-Go Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018 TA: Mickey Zhang Introduction 1.1 Problem Statement and Objective
The Lug-n-Go Team #16: Anika Manzo ( ammanzo2), Brianna Szczesuil (bszcze4), Gregg Lugo ( gclugo2) ECE445 Project Proposal: Spring 2018 TA: Mickey Zhang Introduction 1.1 Problem Statement and Objective
Ex. 1-1 Nacelle Familiarization and Safety Discussion
 Exercise 1-1 Nacelle Familiarization and Safety EXERCISE OBJECTIVE When you have completed this exercise, you will be familiar with key components and safety aspects of the nacelle trainer. You will be
Exercise 1-1 Nacelle Familiarization and Safety EXERCISE OBJECTIVE When you have completed this exercise, you will be familiar with key components and safety aspects of the nacelle trainer. You will be
METROLOGIC INSTRUMENTS, INC. MS1690 Focus Area Imaging Bar Code Scanner Supplemental Configuration Guide
 METROLOGIC INSTRUMENTS, INC. MS1690 Focus Area Imaging Bar Code Scanner Supplemental Configuration Guide Copyright 2005 by Metrologic Instruments, Inc. All rights reserved. No part of this work may be
METROLOGIC INSTRUMENTS, INC. MS1690 Focus Area Imaging Bar Code Scanner Supplemental Configuration Guide Copyright 2005 by Metrologic Instruments, Inc. All rights reserved. No part of this work may be
Club Capra- Minotaurus Design Report
 Table of content Introduction... 3 Team... 3 Cost... 4 Mechanical design... 4 Structure of Minotaurus... 5 Drive train... 6 Electronics... 7 Batteries... 7 Power supply... 7 System signal processing...
Table of content Introduction... 3 Team... 3 Cost... 4 Mechanical design... 4 Structure of Minotaurus... 5 Drive train... 6 Electronics... 7 Batteries... 7 Power supply... 7 System signal processing...
Department of Electrical and Computer Science
 Department of Electrical and Computer Science Howard University Washington, DC 20059 EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Kidd @ 02744064 Lateef Adetona @02732398 Jordan Lafontant
Department of Electrical and Computer Science Howard University Washington, DC 20059 EECE 401 & 402 Senior Design Final Report By Team AutoMoe Tavares Kidd @ 02744064 Lateef Adetona @02732398 Jordan Lafontant
ME 481 Design Report Autonomous Tennis Ball Collector
 ME 481 Design Report Autonomous Tennis Ball Collector December 4, 2009 Prepared for: Professor Jan Huissoon Prepared by: Group 27 Ryan Collier (20201838) Mohammed Adham (20203556) Perry Haldenby (20208031)
ME 481 Design Report Autonomous Tennis Ball Collector December 4, 2009 Prepared for: Professor Jan Huissoon Prepared by: Group 27 Ryan Collier (20201838) Mohammed Adham (20203556) Perry Haldenby (20208031)
DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN
 Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
Ready 12th Symposium on Advance Space Technologies in Robotics and Automation, ESA / ESTEC, Noordwijk, The Nethelands DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN Shivesh Kumar, Raghavendra
Working with VEX Parts
 VEX Robotics Design System VEX Classroom Lab Kit The VEX Robotics Design System is divided up into several different Subsystems: Structure Subsystem Motion Subsystem Power Subsystem Sensor Subsystem Logic
VEX Robotics Design System VEX Classroom Lab Kit The VEX Robotics Design System is divided up into several different Subsystems: Structure Subsystem Motion Subsystem Power Subsystem Sensor Subsystem Logic
Computer science Case study: your (autonomous) taxi awaits you
 taxi awaits you") M&N18/4/COMSC/HP3/ENG/TZ0/XX/CS Computer science Case study: your (autonomous) taxi awaits you For use in May 2018 and November 2018 Instructions to candidates y Case study booklet required for higher
M&N18/4/COMSC/HP3/ENG/TZ0/XX/CS Computer science Case study: your (autonomous) taxi awaits you For use in May 2018 and November 2018 Instructions to candidates y Case study booklet required for higher
ChemWell Replacement Parts & Accessories
 ChemWell Replacement Parts & Accessories Description ChemWell Duffle Bag ChemWell Mouse Pad Photometer Calibration Kit Reagent Cooling Accessory Ordered with New ChemWell - RCA (230V) Reagent Cooling Accessory
ChemWell Replacement Parts & Accessories Description ChemWell Duffle Bag ChemWell Mouse Pad Photometer Calibration Kit Reagent Cooling Accessory Ordered with New ChemWell - RCA (230V) Reagent Cooling Accessory
A Type of Substation Insulator Cleaning Robot
 A Type of Substation Insulator Cleaning Robot Yong Gao * North China Electric Power University, Baoding 071003, Hebei, China. 340121764@qq.com Abstract The core product of this project is the insulator
A Type of Substation Insulator Cleaning Robot Yong Gao * North China Electric Power University, Baoding 071003, Hebei, China. 340121764@qq.com Abstract The core product of this project is the insulator
Control System for a Diesel Generator and UPS
 Control System for a Diesel Generator and UPS I. INTRODUCTION In recent years demand in the continuity of power supply in the local distributed areas is steadily increasing. Nowadays, more and more consumers
Control System for a Diesel Generator and UPS I. INTRODUCTION In recent years demand in the continuity of power supply in the local distributed areas is steadily increasing. Nowadays, more and more consumers
Automated Seat Belt Switch Defect Detector
 pp. 10-16 Krishi Sanskriti Publications http://www.krishisanskriti.org/publication.html Automated Seat Belt Switch Defect Detector Department of Electrical and Computer Engineering, Sri Lanka Institute
pp. 10-16 Krishi Sanskriti Publications http://www.krishisanskriti.org/publication.html Automated Seat Belt Switch Defect Detector Department of Electrical and Computer Engineering, Sri Lanka Institute
Senior Design 1 First Draft. Station. The Smart Solar Powered Cell Phone Charging Station
 Senior Design 1 First Draft UniverSOL Charge Station The Smart Solar Powered Cell Phone Charging Station Amy Parkinson Brock Stoops John Curristan Jonathan German Group #17 Project Narrative Description:
Senior Design 1 First Draft UniverSOL Charge Station The Smart Solar Powered Cell Phone Charging Station Amy Parkinson Brock Stoops John Curristan Jonathan German Group #17 Project Narrative Description:
Enclosure: Proposal for ATVs(All-terrain vehicles) Automatic Protection System
 Automatic Protection System") January 25, 2015 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6 Re: ENSC 440 Project Proposal for ATVs(All-terrain vehicles) Automatic Protection
January 25, 2015 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6 Re: ENSC 440 Project Proposal for ATVs(All-terrain vehicles) Automatic Protection
Technical Robustness and Quality
 Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
REMOTE MONITORING, DUST DETECTING AND CONTROLLING OF SOLAR PHOTOVOLTAIC USING IOT
 REMOTE MONITORING, DUST DETECTING AND CONTROLLING OF SOLAR PHOTOVOLTAIC USING IOT K.Divya 1, M.Aarthi 2, J.Fousiya Sirin 3, R.Haritha 4,J.Iswarya 5 1 AssistantProfessor, Department of EEE, M.Kumarasamy
REMOTE MONITORING, DUST DETECTING AND CONTROLLING OF SOLAR PHOTOVOLTAIC USING IOT K.Divya 1, M.Aarthi 2, J.Fousiya Sirin 3, R.Haritha 4,J.Iswarya 5 1 AssistantProfessor, Department of EEE, M.Kumarasamy
The Minerva driver connects to a single Minerva MX fire panel. Available for Commander and ObSys.
 The Minerva Driver The Minerva driver connects to a single Minerva MX fire panel. Available for Commander and ObSys. This document relates to Minerva driver version 1.1 Please read the Commander Manual
The Minerva Driver The Minerva driver connects to a single Minerva MX fire panel. Available for Commander and ObSys. This document relates to Minerva driver version 1.1 Please read the Commander Manual
September 28, Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6
 September 28, 2015 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 Re: ENSC 440 Project Proposal for Auto-adjustable Spoiler System Dear Dr. Rawicz: The enclosed
September 28, 2015 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, BC V5A 1S6 Re: ENSC 440 Project Proposal for Auto-adjustable Spoiler System Dear Dr. Rawicz: The enclosed
CWA21. Giuliano Industrial S.p.A.
 Wheel Alignment for passenger's cars and LCVS, 3D Camera Imaging Wheel Alignment for passenger's cars and LCVS, 3D Camera Imaging. Designed for high-volume shops, provides high quality measurements in
Wheel Alignment for passenger's cars and LCVS, 3D Camera Imaging Wheel Alignment for passenger's cars and LCVS, 3D Camera Imaging. Designed for high-volume shops, provides high quality measurements in
Software Requirements Specification (SRS) Active Park Assist
 Active Park Assist") Software Requirements Specification (SRS) Active Park Assist Authors: David Kircos, Neha Gupta, Derrick Dunville, Anthony Laurain, Shane McCloskey Customer: Eileen Davidson, Ford Motor Company Instructor:
Software Requirements Specification (SRS) Active Park Assist Authors: David Kircos, Neha Gupta, Derrick Dunville, Anthony Laurain, Shane McCloskey Customer: Eileen Davidson, Ford Motor Company Instructor:
Proposal for Smart Cart
 September 28, 2015 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6 Re: ENSC 440 Project Proposal for Tesigo: Smart cart Dear Dr. Rawicz: The attached
September 28, 2015 Dr. Andrew Rawicz School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6 Re: ENSC 440 Project Proposal for Tesigo: Smart cart Dear Dr. Rawicz: The attached
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
Getting Started with the Digilent Electronics Explorer Board
 Getting Started with the Digilent Electronics Explorer Board This tutorial provides a very basic overview of the Digilent Electronics Explorer (EE) Board. 1. EE Board Physical Description A top view of
Getting Started with the Digilent Electronics Explorer Board This tutorial provides a very basic overview of the Digilent Electronics Explorer (EE) Board. 1. EE Board Physical Description A top view of
Re: ENSC 305W/440W Design Specification RAHS (Remote Automotive Heating System)
") March 19, 2015 School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6 Attn: Dr. Andrew Rawicz Re: ENSC 305W/440W Design Specification RAHS (Remote Automotive Heating System)
March 19, 2015 School of Engineering Science Simon Fraser University Burnaby, British Columbia V5A 1S6 Attn: Dr. Andrew Rawicz Re: ENSC 305W/440W Design Specification RAHS (Remote Automotive Heating System)
DESCRIPTION OF THE RESEARCH RESULTS
 REF.: TRANSP_UAH_13 INDUSTRIAL SECTOR RESEARCHER DEPARTMENT CONTACT DETAILS WEB SITE Transport, Transport Infrastructures, Traffic, Security, Road Safety Miguel A. Sotelo Vázquez, David Fernández- Llorca,
REF.: TRANSP_UAH_13 INDUSTRIAL SECTOR RESEARCHER DEPARTMENT CONTACT DETAILS WEB SITE Transport, Transport Infrastructures, Traffic, Security, Road Safety Miguel A. Sotelo Vázquez, David Fernández- Llorca,
Ton-Tel Multi-Deck Weighbridge
 Weighbridge Rugged construction, Accurate weights Weightel digital load cells from 6 tonnes to 30 tonnes capacity OIML Approved Plug-And-Weigh Proven reliability Weightel digital load cells for maximum
Weighbridge Rugged construction, Accurate weights Weightel digital load cells from 6 tonnes to 30 tonnes capacity OIML Approved Plug-And-Weigh Proven reliability Weightel digital load cells for maximum
Cilantro. Old Dominion University. Team Members:
 Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Cilantro Old Dominion University Faculty Advisor: Dr. Lee Belfore Team Captain: Michael Micros lbelfore@odu.edu mmicr001@odu.edu Team Members: Ntiana Sakioti Matthew Phelps Christian Lurhakumbira nsaki001@odu.edu
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Project Report Cover Page
 New York State Pollution Prevention Institute R&D Program 2015-2016 Student Competition Project Report Cover Page University/College Name Team Name Team Member Names SUNY Buffalo UB-Engineers for a Sustainable
New York State Pollution Prevention Institute R&D Program 2015-2016 Student Competition Project Report Cover Page University/College Name Team Name Team Member Names SUNY Buffalo UB-Engineers for a Sustainable
Mobile Rescue Robot based on the RoboCup Rescue (NIST) Standards
 Standards") University of Manitoba Department of Electrical & Computer Engineering ECE 4600 Group Design Project Progress Report Mobile Rescue Robot based on the RoboCup Rescue (NIST) Standards by Group 05 Justin
University of Manitoba Department of Electrical & Computer Engineering ECE 4600 Group Design Project Progress Report Mobile Rescue Robot based on the RoboCup Rescue (NIST) Standards by Group 05 Justin
Fuel Monitoring and Electronics control of Dispenser for Fuel Station
 RESEARCH ARTICLE OPEN ACCESS Fuel Monitoring and Electronics control of Dispenser for Fuel Station Nang Khin Su Yee 1, Theingi 2, Kyaw Thiha 3 1, 3(Department of Mechatronic Engineering, Mandalay Technological
RESEARCH ARTICLE OPEN ACCESS Fuel Monitoring and Electronics control of Dispenser for Fuel Station Nang Khin Su Yee 1, Theingi 2, Kyaw Thiha 3 1, 3(Department of Mechatronic Engineering, Mandalay Technological
SSW07. Soft Starters. Applications. Standard Features
 General Information CFW10 CFW100 CFW08 CFW500 CFW700 CFW701 CFW11 EDP11 CFW11M SSW05 SSW06 GPH2 TPH2 are static starting devices, designed for the acceleration, deceleration and protection of the three
General Information CFW10 CFW100 CFW08 CFW500 CFW700 CFW701 CFW11 EDP11 CFW11M SSW05 SSW06 GPH2 TPH2 are static starting devices, designed for the acceleration, deceleration and protection of the three
1. Introduction Objective Background High-level Requirement Design Block Diagram Physical Design 4
 Contents 1. Introduction 3 1.1 Objective 3 1.2 Background 3 1.3 High-level Requirement 3 2. Design 3 2.1 Block Diagram 3 2.2 Physical Design 4 2.3 Power Supply 5 2.3.1 Lithium Battery 5 2.3.1 Voltage Regulators
Contents 1. Introduction 3 1.1 Objective 3 1.2 Background 3 1.3 High-level Requirement 3 2. Design 3 2.1 Block Diagram 3 2.2 Physical Design 4 2.3 Power Supply 5 2.3.1 Lithium Battery 5 2.3.1 Voltage Regulators
Engine Builders / Racing Sonic Testers, Transducers & Accessories - Price List Date: 01/01/18
 Engine Builders / Racing Sonic Testers, Transducers & Accessories - Price List Date: 01/01/18 The PR-8 Series of gauges are packaged in an all aluminum case making them the most durable gauges on the market.
Engine Builders / Racing Sonic Testers, Transducers & Accessories - Price List Date: 01/01/18 The PR-8 Series of gauges are packaged in an all aluminum case making them the most durable gauges on the market.
INTRODUCTION OF A HANDS-ON BATTERY AND SYSTEM ANALYZER. CONDUCTANCE PROFILING TM Where did the need come from?
 TECHLOGY VS. VALUE CP Profiling Technology Connectivity Ease-of-use Image: CPX-900 INTRODUCTION OF A HANDS-ON BATTERY AND SYSTEM ANALYZER Why the CPX-900? The CPX, the Profiling TM Battery and System Analyzer,
TECHLOGY VS. VALUE CP Profiling Technology Connectivity Ease-of-use Image: CPX-900 INTRODUCTION OF A HANDS-ON BATTERY AND SYSTEM ANALYZER Why the CPX-900? The CPX, the Profiling TM Battery and System Analyzer,
TECHNICAL MANUAL UNIT MAINTENANCE REPAIR PARTS AND SPECIAL TOOLS LISTS)
") TECHNICAL MANUAL UNIT MAINTENANCE REPAIR PARTS AND SPECIAL TOOLS LISTS) CRANE, TRUCK MOUNTED, HYDRAULIC, 25 TON (CCE) NON-WINTERIZED NSN 3810-00-018-2021 WINTERIZED NSN 3810-00-018-2007 HARNISCHFEGER MODEL
TECHNICAL MANUAL UNIT MAINTENANCE REPAIR PARTS AND SPECIAL TOOLS LISTS) CRANE, TRUCK MOUNTED, HYDRAULIC, 25 TON (CCE) NON-WINTERIZED NSN 3810-00-018-2021 WINTERIZED NSN 3810-00-018-2007 HARNISCHFEGER MODEL
Autonomous Intelligent Vehicles (AIVs), self-mapping, self-navigation.
, self-mapping, self-navigation.") Autonomous Intelligent Vehicles (AIVs), self-mapping, self-navigation. Natural-feature navigation: automatically plans routes to prevent collisions Fleet management: supervises and coordinates the entire
Autonomous Intelligent Vehicles (AIVs), self-mapping, self-navigation. Natural-feature navigation: automatically plans routes to prevent collisions Fleet management: supervises and coordinates the entire
MESA USA and LIMBS International Prosthetic Arm Project
 MESA USA and LIMBS International Prosthetic Arm Project On behalf of LIMBS International, Lucas Galey designed and assembled a prototype prosthetic arm following a $20 budget, and integrating a SparkFun
MESA USA and LIMBS International Prosthetic Arm Project On behalf of LIMBS International, Lucas Galey designed and assembled a prototype prosthetic arm following a $20 budget, and integrating a SparkFun
RAIN SENSING AUTOMATIC CAR WIPER
 International Journal of Technical Innovation in Modern Engineering & Science (IJTIMES) Impact Factor: 5.22 (SJIF-2017), e-issn: 2455-2585 Volume 4, Issue 8, August-2018 RAIN SENSING AUTOMATIC CAR WIPER
International Journal of Technical Innovation in Modern Engineering & Science (IJTIMES) Impact Factor: 5.22 (SJIF-2017), e-issn: 2455-2585 Volume 4, Issue 8, August-2018 RAIN SENSING AUTOMATIC CAR WIPER
Automated Parking Space Locator: RSM
 Automated Parking Space Locator: RSM Kevin Petsch, Phillip Dotzlaf, Charles Daubenspeck, Nathan Duthie, and Dr. Adam Mock Central Michigan University, MI 48859 Email: petsc1k@cmich.edu Abstract The purpose
Automated Parking Space Locator: RSM Kevin Petsch, Phillip Dotzlaf, Charles Daubenspeck, Nathan Duthie, and Dr. Adam Mock Central Michigan University, MI 48859 Email: petsc1k@cmich.edu Abstract The purpose
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements