EFFECTS OF NEXT-GENERATION VEHICLES ON TRAVEL DEMAND AND HIGHWAY CAPACITY
|
|
|
- Shannon Hill
- 6 years ago
- Views:
Transcription




1 pr es ent s T HN Kinitiative r es ear chf r om our Effect sof Next Gener at i onvehi c l es ontr aveldemand&hi ghwaycapaci t y ByFPThi nkwor ki nggr oupmember s :J anebi er s t edt,aar ongooz e, Chr i sgr ay,j os hpet er man,leonrayki n,&j er r ywal t er s Febr uar y2014

2 EFFECTS OF NEXT-GENERATION VEHICLES ON TRAVEL DEMAND AND HIGHWAY CAPACITY BY FP THINK WORKING GROUP MEMBERS: JANE BIERSTEDT, AARON GOOZE, CHRIS GRAY, JOSH PETERMAN, LEON RAYKIN AND JERRY WALTERS FEBRUARY 2014
3 TABLE OF CONTENTS 1. Executive Summary Background and Core Question... 4 I. Market Absorption/Fleet Conversion... 5 II. What Effect Will They Have on VMT? III. Autonomous Vehicle Impact on Freeway Operations References Cited and Further Reading APPENDICES APPENDIX A: Simulation Analysis Assumptions... 1

 on traffic generation, highway capacity, and congestion over time as AVs come to represent a greater percentage of the")

4 1. EXECUTIVE SUMMARY Self-driving (autonomous) vehicles are already being road tested in several states and will be available for sale within five to ten years. As individual safety devices merge with the ability to operate without driver assistance in most situations, autonomy promises to make automobile travel considerably safer and more efficient, and to dramatically change transportation planning and engineering. This paper assesses the most likely effects of autonomous vehicles (AVs) on traffic generation, highway capacity, and congestion over time as AVs come to represent a greater percentage of the vehicles on the road. Rate of Adoption Factors that will influence how rapidly AVs enter the fleet in large numbers include perfection of fail-safe technology, safety and licensing, legal issues and liability, privacy and security issues, personal preferences, cost and equity, and infrastructure implementation (at least until vehicles can communicate and cooperate with one another without embedded roadside equipment). By comparison, airbags, another substantially beneficial and much simpler technology, took 15 years to become standard on all new cars. Two pivotal AV issues are: When and to what degree the NHTSA permits, and then ultimately requires, the use of AV capabilities When automakers will begin to operate under a subscription-based car possession model, replacing the current ownership and leasing models We estimate that AVs will represent a high enough proportion of the fleet to affect the performance of different transportation network elements as follows: 1
5 Exclusive freeway lanes Mixed freeway lanes and ramps Auto-dominated arterials Multi-modal streets and intersections Vehicles operating without a legal driver aboard on: private streets and self-parking in private lots public streets and lots Impact on Vehicle Miles Traveled AVs offer the potential to free drivers attention from the road, to chauffeur people who are unable to drive and, ultimately, to drive robotically without anyone aboard. A number of factors will influence the AV driving experience and the degree to which it will affect VMT, including: Driver experience in terms of stress relief, comfort and ability to use travel time for other purposes Proportion of the network over which AVs are deemed safe enough to operate with high autonomy Quality of service offered by alternative modes of travel, which will vary by urban setting Vehicle costs and sharing or subscription opportunities Legality of use by those otherwise not qualified to drive These unknowns make it difficult to assign specific dates, but we can say that, even at 50% market penetration AVs are likely to produce increases in VMT ranging from 5% to 20% depending on facility class. When fleet penetration reaches 95% and when non-drivers are permitted to travel in robotic cars, VMT increases may reach as high as 35% on portions of the transportation network. Effect on Highway Capacity Initially, AVs will either have no impact, or at worst, they could degrade highway capacity as safetyconscious conservative programming of vehicle speeds and headways reduce vehicle densities and flow. In the very long term, when AVs reach almost full penetration of the fleet and when vehicles are able to cooperate with one another to negotiate merging and intersection right-of-way, operating efficiencies will begin to improve. Some researchers estimate that per-lane freeway capacities could increase to 4,000 vehicles per hour or more. 2
6 Until that time, our own VISSIM simulation analysis suggests capacity benefits are likely to occur only on freeways when the fleet mix is at least 75% autonomous and assuming performance is programmed at intermediate levels between conservative and aggressive. At that point, likely post-2035, the AV fleet mix is likely to achieve traffic flow benefits of 25-35%. Beyond that, when regulations, liability concerns and driver comfort allow much more aggressive car-following algorithms, vehicle delays may be reduced by 45% or more. In Conclusion Favorable effects on the efficiency of the roadway network will vary by facility type will take several decades to produce a 50% increase in operating efficiency and capacity utilization.. Concurrently, improved driver experience and the availability of robo-chauffeuring for those who would otherwise not be permitted to drive may increase VMT per capita by as much as 35%, off-setting much of the efficiency gain. Although the net operational improvements to streets and highways would not significantly reduce the need to expand infrastructure to keep pace with population growth, the bottom-line benefits of AVs on the road are most likely to take the form of improved mobility for all, increased safety, reduced incident-related congestion and reduced environmental and social costs per vehicle mile traveled. 3
7 2. BACKGROUND AND CORE QUESTION Automated vehicle technologies promise to transform traveler experience and traffic operation. Technologies already undergoing on-road testing include adaptive cruise control, traffic incident and lane departure warnings, driver attentiveness detection, vehicle route navigation and congestion avoidance, eco-driving optimization and self-parking capabilities. They offer the ability to maintain safe and efficient vehicle spacing and flow, and will ultimately operate autonomously without requiring driver attention with, some forecast, significant reductions in collisions and much more efficient use of road capacity. Recognizing the potentially dramatic changes to the transportation planning and engineering profession, the FP Think working group prepared this white paper in order to: 1. Clarify the operating characteristics and driver experience likely to become available in next-gen vehicles 2. Determine how soon such vehicles will be in common use 3. Predict their effects on traffic generation, including whether they will increase or reduce the number of vehicle miles traveled 4. Estimate their effects on traffic capacity and congestion In the future, the group would also like to undertake research on the safety benefits of autonomous vehicles and the potential reduction in collisions and incident-related congestion. These factors will clearly influence our long- and short-range travel behavior forecasting, traffic impact assessments, traffic simulations and operations analyses, and transportation system planning and engineering. The interactions among automated vehicles and pedestrians and bicyclists will also affect our planning and design integrated modal networks and complete streets. Some experts project there may soon be a legal requirement to consider vehicle automation in EIRs and EISs. In the following chapters, we consider the implications of next-generation vehicles on the four factors listed above. We recognize the levels of automation defined by NHSTA: 1 Level 0 No Automation: Current non-automated vehicles. The driver is in complete control. Warning devices, such as blind spot monitoring, may be included. Vehicle-to-vehicle (V2V) warning technology may be included as well. Level 1 Functional-specific automation: Automation of one or more specific functions like stability control or braking that assists the driver
8 Level 2 Combined-function automation: Ability to address two specific functions such as traffic jam assist, where the vehicle could control both speed and lane position in a severely congested environment. Level 3 Limited self-driving automation: Driver is not expected to constantly monitor the roadway while driving and can cede control of the vehicle in selected environments. Does require the driver to maintain sufficient vigilance to be able to take over operation of the vehicle as needed. Level 4 Full self-driving automation: Driver needs only provide destination or navigation input. Vehicle operating algorithms depend on input from cameras and sensors rather than communication with other car s computers. Level 5 Automated taxis/ electronic chauffeur service and connected, cooperative vehicles capable of communicating with one another on position, trajectory and intentions, and negotiating rights-of-way with one another. While we address the market penetration, operating characteristics, and driver experience likely to become available in all five stages, we focus most attention on the transformative potential within levels 3 and 4 of next-gen evolution. I. Market Absorption/Fleet Conversion This chapter will address questions like, When will autonomous and/or connected vehicles be available? and How fast will they be integrated into the vehicle fleet such that they will affect travel behavior and system performance? First we will look at car manufacturer and technology producer projections on when autonomous vehicles will be ready for the market. Once they are available there will still be barriers to fleet conversion, and we will spend some time addressing those factors. Next, we will look at available projections from people who have been studying this topic for some time. All of this information will be synthesized and we will develop our own projections. A. When Will Autonomous Vehicles Be Available? Vehicles with Level 1 automation (functional-specific automation) are available now. These features include adaptive cruise control, vehicle spacing monitoring with speed adjustments, lane assist (which monitors the vehicle's position in the lane and warns the driver when the vehicle is leaving its lane), and parking assist, which assists the driver in parallel parking. Current offerings and predictions from major automobile manufacturers and technology companies regarding increased levels of automation include: 5
9 2013 The 2014 Mercedes S-Class comes with options for autonomous steering, lane keeping, acceleration/braking, parking, collision avoidance, and driver fatigue detection. The 2014 BMW i3 can autonomously steer, accelerate, and brake in traffic jams at up to 25 miles per hour Israeli company Mobileye forms partnership with Tesla to develop autonomous car technology Audi plans to market vehicles that can autonomously steer, accelerate, and brake at lower speeds such as in traffic jams. Cadillac plans vehicles with "super cruise" that will allow autonomous steering, braking and lane guidance. Nissan expects to sell vehicles with autonomous steering, braking, lane guidance, throttle, gear shifting, and, as permitted by law, unoccupied self-parking after passengers exit. Toyota plans to roll out near-autonomous vehicles dubbed Automated Highway Driving Assist with Lane Trace Control and Cooperative-adaptive Cruise Control Tesla (with Mobileye) expects their vehicles to be autonomous for percent of distance driven. 3 Mobileye expects to release fully autonomous car technology Google expects to have autonomous cars on the market GM, Mercedes-Benz, Audi, Nissan, Volvo, and BMW all expect to sell autonomous cars (likely combination of Level 3 and Level 4; their respective definitions of autonomous are rarely based on NHTSA levels) and comments from Paul Godsmark (via ITE discussion forum) 6
10 B. What Are the Barriers to Fleet Conversion? Even after fully autonomous vehicles are available, it will take some time before they represent a majority of the vehicle fleet since vehicle owners will not just go out and immediately dispose of their old vehicles and buy new ones. Plus, the first autonomous vehicles will be expensive and it will take time for manufacturers to ramp up production to meet the demand. In addition to these economic (financial and supply/demand) constraints, there are other legal, social, and technological barriers that will affect the pace of fleet conversion. 1. Technology The birth of autonomous vehicle technology is hard to pinpoint. One point of reference is the 1980s when German engineer Ernst Dickmanns equipped a Mercedes sedan with video cameras and processors and programmed it to follow lane lines. Google s team started developing their autonomous vehicle (AV) in 2008 and they are continually testing and perfecting the technology. But more testing and fine tuning are needed before Google s AVs are ready for public consumption, estimated to be in Therefore, one barrier is that the technology, while moving rapidly toward the needed functionality, is not yet available. Once it is, universally-adopted platform/software compatibility among manufacturers would need to be developed to reap the benefit of V2V communication, and that could take more time. 2. Cost/Social Equity Like most new technology, the first AVs will be expensive and the vehicles will only be affordable to those with high incomes. The added cost will eventually decrease but it could take 20 years for them to be affordable. 3. Safety and Licensing A major barrier will be licensing the vehicles to determine when they are ready for the road. One of the benefits of autonomous vehicles is enhanced safety since human factors (lack of visibility, slow reaction times, inattention, influences of alcohol and drugs, etc.) are removed. However, drivers encounter a great number of circumstances when judgment is needed and it would be difficult to ensure that autonomous vehicles can operate safely in all of those circumstances. For example, if there is an object in the road, what are the appropriate responses? Change lanes, but only if the lane is clear. Go off the road, but only if there is a shoulder. What if the object is only a cardboard box? AVs must be tested to prove they are safer than current technology for a variety of circumstances. The extent of the testing needed to assuage 7
11 concerns of regulators and consumers has not yet been determined but will likely be very high at a six sigma level meaning three defects per million. 4. Infrastructure Until AVs constitute a large majority of the vehicle fleet, their roadway operational benefits to locations with recurring congestion may not be realized if they are mixed with traditional vehicles. This could be a barrier to adoption: designated lanes or separate roadway facilities may be needed. 5. Legal Issues and Liability Another barrier is liability in case of a collision. Human drivers are provided leeway in collisions that occur because of situations beyond their control. But the sensors and software in AVs are expected to make more-informed decisions; there is, therefore, a higher expectation of collision avoidance. But what happens if a collision occurs? Who is liable? The vehicle s owner? The manufacturer for faulty software? What if the only option is to hit another vehicle? Does (or should) the AV prioritize the safety of the people in its vehicle versus other crash-involved parties? These questions (and others) will need to be answered prior to AVs entering the vehicle fleet. 6. Privacy AVs gather, share, and store a lot of data to operate. There will be questions regarding how much data should be stored, who owns the data, and who has access to the data. There are many beneficial applications for the data such as traffic signal optimization and better planning/improved transportation infrastructure funding decisions. However, there are also concerns such as using it to assess liability when a person is driving an AV during a collision. But what about government agencies having access to travel data? (Think of the recent NSA spying scandal.) What about commercial applications of this data, such as targeted advertising? 7. Security A potential limitation for AVs is the security of their computer systems from either a software glitch or intentional sabotage. A car's computer could potentially be compromised, as could a communication system between cars. 8
12 8. Personal Preferences Another barrier is people s acceptance of AVs because they might be resistant to forfeit control of their vehicles or their enjoyment of driving. C. Available Projections One of the most commonly touted predictions is from the Institute of Electrical and Electronics Engineers (IEEE) where a team of expert members estimate up to 75% of all vehicles will be autonomous (Level 4) by Todd Litman of the Victoria Transport Policy Institute (VTPI) predicts that in the 2050s half of the vehicle fleet will be autonomous and a fleet mix of 75% will not occur until the 2060s. These predictions are based on the deployment cycles, costs, and adoption rate of other automotive technologies. For example, automatic transmissions were developed in the 1930s but did not become reliable and efficient until the 1980s. Now, decades later about 90% of U.S. vehicles have automatic transmissions. But not all new technology has a cycle that long. Air bags were first developed in 1973 and took 15 years to become standard in some vehicles. But by 1998 they were in 100% of new vehicles due to Federal mandates. D. Our Projections The Victoria Transport Policy Institute makes a strong case it will take decades for AVs to reach a large enough proportion of the vehicle fleet to cause a substantial change to travel behavior and to require wholesale transportation infrastructure changes. Their prediction of 2050/2060 before AVs achieve a 50 to 75% share of the vehicle fleet is plausible. This prediction is based on an entry date of 2018/2020 and that it will take another 20 years (2040) for them to be affordable, historic vehicle purchasing/turnover rates (estimated to be eight years), and the numerous barriers described above. Government regulators will also require time to become comfortable with the concept, especially as it concerns communication amongst vehicles and infrastructure. The National Highway Traffic Safety Administration (NHTSA) is engaged in a several-year review and testing process, and just announced 4 they would begin taking steps to implement V2V technology in light-duty vehicles. Individual states 4 Vehicle+Communication+Technology+for+Light+Vehicles 9
13 have welcomed testing and development of AVs. 5 Nevada has testing regulations in place, and California is finalizing its draft regulations 6 for Level 4 automated vehicles with intent to adopt by On the other hand, there are high stakes and substantial momentum behind bringing intelligent vehicles to market. On the private side, the financial benefits to the insurance and other industries could be huge if, as projected, 80% to 90% of collisions can be eliminated. 7 Consumer desire for convenience and gadgetry along with the business-model benefits of the massive data inflow and a captive audience for outflow of sponsored content and promotions have already captured the vigorous enthusiasm and R&D investment of all of the major automakers. With similar incentives, Google and other tech companies and universities are ambitiously refining the technology and machine-learning algorithms to speed the capabilities to market. Morgan Stanley predicts that autonomous vehicles can contribute $1.3 trillion in annual savings to the U.S. economy. Resistance to increasing vehicle cost will be considerably less than was encountered with airbags. One significant wild card may be a paradigm shift away from the car ownership economy. Cars presently remain in use an average of over ten years. The auto industry is examining moving their products to a subscription model, similar to the cell phone market, which will speed up the fleet replacement and the introduction of new technologies. The convenience and minimal labor cost of Autonomous Taxis could rapidly attract users to AVs. 8 Finally, if companies such as AutonomouStuff 9 make it easy and cheap to retrofit current vehicles with autonomous technology the fleet replacement time does not apply. Under the right circumstances, we could reach a 50 to 75% autonomous fleet mix between 2035 and 2045 rather than the VTPI forecast of 2050 to Either way, there will be significant intermediate steps. Based on our research and judgment, we project: 25% of vehicles on the road will be autonomous with vehicle-to-vehicle cooperation by % of vehicles on the road will be autonomous V2V in % beyond 2035 when federally mandated or when subscription ownership model prevails 95% beyond 2040 when federally mandated or when subscription ownership model prevails 5 An overview of legislation status across the US can be found at Insurance companies would pay fewer settlements with fewer collisions. However, the demand for insurance may also decrease thus decreasing premiums and insurance company revenues. 8 See
14 Presence in the vehicle fleet does not necessarily mean all elements of the transportation network will be affected similarly. There will be operational challenges affecting vehicle capabilities and the fact that, at any stage, they will be less than ubiquitous. There are also unanswered questions on risk tolerance of the regulators and the public. Under the circumstances, we believe the deployment will affect different system elements as follows: exclusive freeway lanes in mixed freeway lanes and ramps in auto-dominated arterials in all multi-modal streets and intersections in without a legal driver aboard (including completely unoccupied): o private streets and self-parking in private lots o public streets and lots However, given the stated uncertainties with respect to private industry R&D, government approval, and public acceptance, please consider these no more than educated guesses. II. What Effect Will They Have on VMT? A number of complex factors with varying levels of interaction will affect changes to travel behavior patterns, resulting in either an increase or decrease in overall vehicle-miles traveled (VMT). In order to understand the uncertain nature of these elements, it is relevant to describe the range of possible outcomes related to each factor to ultimately determine the reasons that driving will reduce or increase with the adoption of autonomous vehicles. A. Driver Experience If autonomous vehicles significantly enhance the user experience for drivers, then autonomous vehicle owners may travel more than they currently do. However, if autonomous vehicles provide a similar user experience as traditional vehicles, any change in travel behavior with their deployment will be limited. To understand the effect of autonomous vehicles on the user experience, one must first understand how driving is currently perceived. The research is replete with stories about the negative impacts of driving such as: A team of researchers from MIT concluded in June 2013 that driving in urban areas may actually be more stressful to some persons than skydiving
15 Just sitting in the driving position for long periods of time can cause muscle cramps, back pain and lead to long-term spinal disc degradation. 11 Long-distance commuters are more likely to divorce or separate from their partners. 12 Given all of the negatives above, one can conclude the current experience for many drivers using their existing vehicles is negative. Some specific complaints are often voiced include: Need to maintain constant vigilance while driving Repetitive nature of driving Frustrations related to congesting Wayfinding Physical position required for driving One unique aspect of driving is that the layout of vehicles has not changed significantly since their invention. Driving has provided significant advantages that will remain present in AVs, including door-todoor mobility, trip scheduling freedom and (under the right circumstances) enjoyment. However, similar to 100 years ago, a driver of today must sit erect in his seat, facing forward, hands on the wheel, feet on the pedals. Even with the technological change in cars over this time, drivers still must remain attentive to the roadway conditions and maintain hands on the wheel, ideally at all times. While autonomous vehicles hold the promise of improving the user experience, the change in user experience is likely to be gradual with a significant change occurring only at the highest levels of automation. We anticipate the change in user experience will be moderate until one reaches Level 3 or even Level 4. Level 1 vehicles are currently deployed on the market in the United States as of 2013 and limited deployment of Level 2 vehicles is anticipated in However; these vehicles provide limited change in the user experience for the following reasons: Drivers still must maintain constant vigilance of the roadway and other vehicles Drivers must still maintain the forward, erect position There may be some marginal benefits to Level 2 automation, particularly for drivers making longerdistance commutes in congested urban areas. For example, a Level 2 vehicle with traffic jam assist could be highly beneficial to a driver commuting in a location such as Los Angeles or Silicon Valley, where
16 commutes of one hour in each direction are not uncommon. In this example, a driver s stress level might be slightly reduced if they are able to cede a moderate level of control, similar to how drivers currently use cruise control in uncongested environments. Level 3 presents the minimal threshold at which there is a tangible change in the driver experience. One significant change is that drivers could be free to divert their attention from the roadways for extended periods of time. As currently occurs, many drivers attempt to multi-task while driving, often while on congested roadways. Anecdotal evidence suggests drivers will often engage in other activities while driving including eating, drinking, speaking on their cellphones, checking , or texting. In fact, drivers may perform all of these functions during longer distance commutes. A recent survey indicated that ¼ of drivers in the United States may be accessing the Internet while driving. With the implementation of Level 3 automation, drivers may be able to further engage in these activities while driving. California, Florida and Nevada currently allow on-road testing of Level 3 autonomy, including assessing whether to allow drivers to engage in distracting activities while in charge of the vehicle. If not, a limitation on behavior change will occur in the regulatory environment, such as California s current laws which exact significant monetary penalties for talking on a cell phone without using a hands-free device while driving. Another factor related to Level 3 automation is the physical position of the driver. Level 3 vehicles will very likely be designed similar to the cars of today, requiring the driver to maintain the same erect, forward-facing posture as drivers have historically done. Therefore, we could expect to see many of the same physiological challenges that drivers currently experience. Level 4 automation has the potential to significantly improve the user experience for drivers, based on a number of factors. The one key change is there may not be a need for a designated driver compartment as with the vehicles of today. In a sense, all persons in the car would be able to operate as passengers instead of driver operators. For example, occupants could be seated in a back passenger compartment, recline on couches, or even rest. Many of the activities drivers already engage in while driving such as talking on the phone, texting, ing, or checking the internet could be done easily. A Level 4 autonomous vehicle could also significantly reduce the amount of stress which drivers currently experience. A recent study in the United Kingdom indicated riding a bus reduces stress levels as compared to driving on the same route by a significant margin: 13 The author of the study stated the following:
17 Three main factors that make driving a car stressful: heavy traffic causes the brain to work harder, traffic congestions causes a build-up of anger and there is a sense of frustration that a person is "wasting one's life" because few things can be done at the same time as driving. With improved user experience, persons may be encouraged to travel more than they currently do, thereby increasing VMT. B. Mode Split Variation The relation and effect of autonomous vehicles on other modes is one element that has a multitude of outcomes on travel behavior and VMT changes. A substantial amount of research has looked at the notion of travel time utility and how users of various modes perceive that travel time. Is travel truly a derived demand and how does it vary between bicycling, walking, transit and automobile travel? Researchers in New Zealand evaluated this concept and found that walkers and cyclists were most likely to enjoy their time commuting as opposed to drivers or transit users. 14 All told, 89% of the drivers in the study said they would switch to public transport or walking if the travel time and cost was equal. This element is the big unknown in the case of autonomous vehicle impacts on travel behavior. Mode choice is largely an economic equation, in which time-value and costs are weighed against the general utility of the travel itself. Due to the previously discussed variations in potential costs with autonomous vehicle travel, it is extremely difficult to accurately predict mode shift outcomes. That said, it is possible to evaluate shifts in time-valuation as a result of vehicle automation. Research has estimated bicyclists and pedestrians valuation of time during travel is equal to that of passengers in vehicles and transit (roughly 25% of the wage rate). 15 Drivers value of time ranges from 25% to 50% depending on conditions and this variability is present in transit users depending on vehicle crowding. As stated in the previous section, the change in the driver experience may align the value of time of drivers to that of transit users in an un-crowded environment. Therefore, given a constant per-mile cost, a certain percentage of transit users and/or pedestrians and bicyclists may switch to autonomous vehicles for a portion of their travel, thereby increasing VMT. C. Safety
18 A report by KPMG stated up to 90% of all vehicle collisions could be eliminated with the use of autonomous vehicles. A major reduction in collision rates could have a significant effect on safety features such as frame design, airbag provision and overall vehicle weight. The true degree of vehicle weight reduction hinges on the actual degree of change in the collision rate. Initial expectations in collision reduction may be overstated based upon prior experience with vehicle safety improvements. Research by Sam Peltzman of the University of Chicago found the 20% reduction in highway traffic fatalities from government regulations in the 1950s and 1960s was offset by an increase in collisions as a result of drivers feeling safer. 16 This included an increase in pedestrian and bicyclist fatalities as a result of higher speeds allowed Next-Generation Vehicles An Active Transportation Perspective (by Matt Benjamin) From the active transportation perspective, increased roadway safety is the greatest potential benefit of next-generation vehicles. Safe passing of bicyclists and yielding to crossing pedestrians are exactly the types of driver behavior that active transportation planners would like to program into the minds of human drivers. To date, the primary focus of the auto industry and government regulators has been on safety, which could have important benefits when the vehicles are fully integrated into the consumer market. There are also some reasons for concern. While the ability of self-driving vehicles to operate safely will undoubtedly be the primary criteria for their initial acceptance by regulators and consumers, various other expectations that they will increase roadway capacity have the potential to undermine the safety benefits. Safety and capacity are often at odds under current conditions, forcing traffic engineers and policy makers into difficult decisions as they attempt to strike the appropriate balance. The demands of the public often skew this balance in favor of capacity rather than safety. Traffic collisions are typically viewed by the public as a sad but unavoidable byproduct of human mobility, while congestion is seen as correctable malfunction that needs to be resolved. Examples include traffic engineering decisions to restrict pedestrian movements at some intersections, allowance of permissive left turns and reluctance to implement automated traffic enforcement technologies. Autonomous vehicles will have sophisticated built-in capabilities to sense pedestrian and bicycle movements and to avoid conflicts and collisions regardless of the effect on traffic capacity. However, in practice, we will need to thoroughly evaluate the abilities of system planning and vehicle operations to remain within the limits of their technological abilities and to operate safely rather than to squeeze more capacity out of our limited roadway space. This is especially the case in dense urban settings where pre-programmed 100% yielding vehicle compliance become a source of driver frustration and increased street congestion. While humans may no longer be behind the wheel in the literal sense, we will still be driving these important decisions. 16 The Effects of Automobile Safety Regulation. Peltzman, Sam. University of Chicago
19 due to safety regulations. The difference in this case is the safety improvement provided by autonomous vehicle technology is mostly dependent on non-human factors and thus may not suffer from the same offsetting effect. That said, automakers and consumers may demand that the underlying algorithms within the safety features allow for closer following distances and higher speeds due to the increased perception of safety, a concept known as risk compensation. Users of vehicles may increase their miles-traveled as the perception of safety increases relative to other modes, especially for long distance travel such as air and rail. Additionally, this notion of risk compensation may be evident in levels of autonomy up to Level 3 in which a user s perception of safety results in less attention to monitoring the vehicle, even though the capability of the vehicle s autonomy does not warrant that level of control. Issues of shared liability at autonomy Level 3 may necessitate enhanced safety features rather than a reduction due to the varying nature of driver control. Vehicles operating at high speeds may still require significant safety features due to uncontrollable events such as weather, debris or other collision-related factors as the frequency of collisions would never reduce to zero. While risk compensation and other offsetting effects may lead to a decrease or a stabilization of vehiclemiles-traveled, the general improvement in safety most likely will lead to an increase in vehicle travel. With a lower collision rate, incidental congestion will realize a dramatic decrease, with estimates that 25% of all congestion is incident related. 17 The resulting decrease in congestion would allow for expanded mobility and a reduced cost of travel for existing and future drivers which may result in additional induced travel. D. Vehicle Costs and Car Sharing The extent to which autonomous vehicle technology will increase vehicle cost has a range of possibilities. If the safety feature reduction described above allows for a reduction in vehicle size and materials required, those savings could partially offset the added cost of the new technology. Additional improvements in safety could yield a dramatic decrease in insurance premiums for vehicle ownership. The KPMG report stated that the Google Car currently utilizes roughly $100,000 in technology, but that added cost is predicted to dramatically decrease with economies of scale present in mass-production. Assuming that costs are still higher than current vehicles, what will this mean for vehicle ownership trends? While the image of roaming shared autonomous vehicle is typical for Autonomy Level 4, car-sharing will take on an expanded role for levels of autonomy 1 through 3 due to the added costs and current shifts in ownership
20 trends. 18 Studies have shown that car-sharing service provision substantially reduces overall vehicle ownership 19 which in turn could reduce user VMT. 20 In a study by Cervero, 29% of the car-sharing members had gotten rid of a car while also reducing their overall VMT. The VMT decrease was partially due to users increased perception of the true transactional cost of vehicle usage, which affected the number of trips taken and the total length of each trip. Based on the expectation that the expansion of autonomous vehicle technology will coincide with an increase in car-sharing due to the added costs of the technology, VMT on a system-wide level may in fact decrease. A recent study by Kockelman et al. 21 found that if 5% of household trips were made by a shared autonomous vehicle, each of these vehicles could replace 11 conventional household vehicles but that because these shared vehicles were making all the same trips as the conventional vehicles, and repositioning themselves between trips, the shared vehicle actually increased VMT. Furthermore, if private vehicle costs are reduced due to a decrease in size and materials required and/or reductions in insurance premiums, then ownership may increase which could lead to an increase in VMT. E. Previous Non-Drivers A major factor in the potential change to overall VMT is the introduction of drivers who previously could not or chose not to own and operate a vehicle. This includes older and disabled populations, low-income households (especially with car sharing) and children. Much of the discussion of this effect centers on the previously discussed elements, including vehicle costs and mode split variations. If current vehicles are priced too high for low-income households, then autonomous vehicles will certainly be out of reach for those individuals and they will continue to travel via their current modes. More affluent older and disabled persons may realize the most benefit from autonomous vehicle technology and may in fact travel more. This could result in both an increase in vehicle trips and in trip length due to a switch from other modes of travel and induced demand. Again, as with the previously discussed elements, this change is contingent upon overall vehicle operating and ownership cost reductions. Assuming that costs remain competitive, it s fair to assume the introduction of a population of new drivers will most likely yield an increase in VMT. F. Regional Variations The varying effect on VMT can also be attributed to regional differences in which multi-modal provision or geography yields an opposing outcome. A more urban area with a robust transit network may in fact
21 realize a decrease in VMT. This is due to autonomous vehicles ability to potentially solve the last-mile problem that faces many transit agencies. A historical problem in cities has been the fact that drivers remain in their cars because of the difficulty of connecting to a main transit station from their house or place of work. 22 The underlying rapid network is in place but is unable to provide a competitive service to all areas of the city. An area in Singapore is already testing the ability of shared autonomous vehicles to solve this problem. 23 If successfully implemented in coordination with transit service, urban areas may realize an overall decrease in VMT due to travelers shifting the longest part of their journey to transit while utilizing autonomous vehicles for the shortest segment of the trip. However, for trips outside of the core transit network, drivers within urban areas may realize an increase in VMT due to a modal shift for inter-regional travel from airplane or rail to personal vehicles. This shift is primarily contingent upon changes in operating costs for the various modes and the travel time variations. Contrast this scenario with that of a rural area or less urbanized city without a definitive transit network. Without any other options for travel, drivers in these areas may realize an overall increase in VMT due to the previously described improvements in the driver experience. The low amounts of congestion coupled with expected increase in operating speeds will drastically increase the travel shed of drivers in these areas, and the main limitation in VMT growth will be the cost of fuel and land use constraints. One other factor that could limit the growth of VMT or possibly decrease it is the new viability of transit in these areas with autonomous vehicles. Smaller scale vehicles and more flexible routing may allow for enhanced transit service provision in low density areas and could contribute to a modal shift from single occupancy vehicles. G. Summary A summary of the elements and their varying effects on VMT is presented in Table 1 below. This table presents a variety of factors that may lead to a change in overall VMT. For example, deployment of Level 3 and Level 4 autonomous vehicles may create a noticeable change in the driver s experience, reducing the level of stress and allowing more multi-tasking. However; the change in user experience is limited prior to the implementation of Level 3 automation; therefore any change in VMT might be limited in earlier levels of automation. While the cost per mile for autonomous vehicle travel may rival that of transit, the added technological costs may never allow for that scale of cost reduction. Additionally, the potential for a decrease in collisions with autonomous vehicles may lead to VMT increases with improved roadway operations and reduced vehicle weight. However, factors such as risk compensation and liability issues may negate any changes to VMT attributed to safety improvements. Finally, new populations of drivers
22 (such as the disabled and elderly) most likely will lead to an increase in VMT, however the cost of the vehicles may not allow for a large expansion of the driving populace, and only a shift to a car-sharing environment will provide access to larger populations to autonomous vehicle technology. TABLE 1. ELEMENT VARIATIONS ON VMT IMPACTS Element Reasons for VMT increase Reasons for VMT decrease Driver Experience Levels 3 and 4 allow for multi-tasking and improved riding position Change in passenger layout and seating configuration Reduced level of stress for driver Change in driver experience is not significant at Level 3, and stress levels remain constant due to continued congestion Mode Split Variation Cost per mile rivals transit and timevalue equation shifts toward autonomous vehicle instead of transit/bike/walking Cost per mile increases significantly, placing more value on transit and other modes Safety Safety improvements reduce need for added vehicle weight, reducing fuel need and cost of driving Safety improvements improve roadway operation with reduction in incidental congestion Increased perception of safety relative to other modes results in higher vehicle usage Risk compensation leads to offsetting increase in other collisions Shared liability in Level 3 requires vehicle to operate too safely, negating improved roadway operational benefits Uncontrollable factors such as debris or weather place a limit on improvements to safety and reductions in vehicle safety features for high-speed operation Vehicle Cost of Ownership Decreased vehicle size due to safety improvements decrease vehicle cost Reduction in insurance premiums Costs for technology increase, leading to continued downward trend in ownership rates Previous Non-Drivers Added population of new drivers who can afford the technology (elderly, disabled) Technology is still out of reach for low-income and many current nondrivers Regional Variations Rural and smaller urban areas provide no alternative to autonomous vehicle travel Robust transit network works in conjunction with autonomous vehicle technology to solve last-mile problem Tables 2 and 3 present the range of change in VMT dependent on regional variation as well as the range of VMT changes associated with varying locations of permitted use. 19
23 TABLE 2. INCREASE IN VMT PER CAPITA IN AUTO-DEPENDENT REGIONS Locations where Use Permitted Exclusive freeway lanes Market Penetration 25% 50% 75% 95% +10% +20% +30% +35% Mixed freeway lanes and ramps +5% +10% +20% +30% Auto-dominated arterials +5% +10% +20% All multi-modal streets +5% +10% Without a legal driver aboard +35% +35% TABLE 3. INCREASE IN VMT PER CAPITA IN MULTI-MODAL REGIONS Locations where Use Permitted Exclusive freeway lanes Market Penetration 25% 50% 75% 95% +5% +10% +15% +20% Mixed freeway lanes and ramps +0% +5% +10% +15% Auto-dominated arterials +0% +5% +10% All multi-modal streets +0% +5% Without a legal driver aboard +25% +35% While these increases may seem dubious in an era of limited growth in VMT, they reflect the truly transformative nature of autonomous vehicles could have on the overall transportation system. Key factors which will contribute to this potential increase in VMT include: 20
24 Reduction in driver stress, increasing the time which someone is willing to drive. This increased time could vastly increase the catchment area a person is willing to locate proximate to their place of employment. Less attention required for the act of driving will increase the opportunity to engage in other activities while driving safely. Drivers will likely feel less as if driving is wasted time. Greater mobility of the disabled, seniors, and other persons who are currently precluded from driving. Autonomous vehicles may reduce the instances of incidental congestion, further reducing stress on drivers. It should be noted that these VMT estimates are not the sole view on this topic. It is possible, though unlikely, that the widespread deployment of autonomous vehicles could lead to a reduction in overall VMT. For example, the deployment of autonomous shared vehicles, particularly in urban settings, is considered likely to reduce VMT since these vehicles would reduce personal vehicle ownership. While this replacement is potentially true, research cited above also indicates the repositioning of these autonomous vehicles as they travel to and from various locations is likely to negate much of the reduction in VMT. Additionally, these VMT estimates assume there are no upper limits to an increase in VMT and there are no significant constraints to the usage of vehicles in the future such as limits on roadway infrastructure, capacity, fuel availability or cost, or other limitations. III. Autonomous Vehicle Impact on Freeway Operations In this section we examine some potential impacts of Automated Vehicles on the capacity and efficiency of roadways. For the purposes of this white paper, the focus is on freeways. To be sure, Automated and/or Connected Vehicles (V2V) will change the way all vehicles interact with local roadways. It appears, however, that for safety and technological reasons automated functions are being developed for freeways first; thus we will focus on that application. 24 A. Measuring Operations Traditionally, freeway operations are measured according to the following criteria: Hourly traffic volume, measured in vehicles per hour per lane (vphpl). Under ideal conditions, freeways typically have an hourly traffic volume capacity (i.e., maximum throughput ) 24 While we focus on freeways in this white paper, autonomous vehicles have the potential to improve capacities at intersections through similar operating improvements as described below and through vehicle-to-infrastructure (V2I) communication. 21
 is greater than the maximum throughput (i.")
25 of 2,000 vphpl. If the demand volume exceeds the maximum throughput a bottleneck is formed, creating a queue of vehicles. Delay, measured in vehicle-hours per day or person-hours per day for a particular segment. Delay occurs at bottlenecks because the desired throughput (i.e., arrival rate ) is greater than the maximum throughput (i.e., departure rate ), causing vehicles to slow. Vehicle-hours of delay is determined by the area between the curves for cumulative vehicle arrivals and departures over time. Person-hours of delay is determined by multiplying this value by the average occupancy per vehicle. Travel time, measured in minutes and seconds. Travel time through a segment increases as speed decreases. Speed decreases for a given segment with increasing traffic demand, particularly once the demand exceeds the maximum throughput (see Figure 1). Travel time variability, measured in standard deviation of travel time for a sample of trips. Travel time variability is an estimate of the Figure 1. Speed vs. Volume (WSDOT, 2013) reliability, or consistency, of travel times. A normalized version of the travel time variability is sometimes reported by dividing the standard deviation by the average travel time. This normalization ensures that a given standard deviation of travel time has a larger impact on the variability metric as its percentage of the average travel time increases (e.g., a five minute standard deviation has a greater impact on variability when the average travel time is twenty minutes versus one hour). Additionally, each freeway segment can exhibit its own relationship (unique from other segments) between traffic volume (vphpl) and traffic density (vehicles per mile per lane). Traffic volume on a freeway segment increases from zero to the maximum throughput at the optimal density. Beyond the optimal density, the traffic volume begins to decrease and eventually approach the jam density, at which both flow and speed become zero (Figure 2) We recognize this is a very generalized curve; many argue against a continuous q-k relationship. 22
26 Optimal Density Flow (veh/hour/lane) FP Think: Effects of Next-Generation Vehicles on Travel Demand and Highway Capacity February 2014 Figure 2. Typical Traffic Density Vehicle Flow Relationship Maximum Throughput Jam Density Density (veh/mile/lane) B. The Impact of Automated Vehicles Automated and connected vehicles will have a net effect on freeway operations and capacity, depending upon their share of the fleet mix, their operating parameters (acceleration, deceleration, headway, etc.) and their ability to react to traffic conditions beyond the vehicles immediately adjacent to them. 1. Fleet Mix Chapter 2 of this paper discusses the prospective timeline by which automated vehicles will enter the fleet, suggesting the high market penetration among vehicles on freeways is not expected until at least 2030 and high use on other facilities is not likely until beyond Based on our review of literature there are relevant findings with respect to fleet mix. van Arem et al. 26 find that the penetration rate needs to exceed 40% before significant impacts are noticed. Similarly, Jones and Philips 27 reviewed simulations and established a summary conclusion that positive impacts on flow 26 Bart van Arem, Cornelie J. G. van Driel, and Ruben Visser. The Impact of Cooperative Adaptive Cruise Control on Traffic-Flow Characteristics; IEEE Transactions on Intelligent Transportation Systems, Vol. 7, No. 4, December Stephen Jones and Brian H. Philips. Cooperative Adaptive Cruise Control: Critical Human Factors Issues and Research Questions. Proceedings of the Seventh International Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design. Bolton Landing, New York, June
27 stability and capacity are achieved only when fleet penetration rate of vehicles with Cooperative Adaptive Cruise Control (CACC) exceeds 40%. Davis 28 found that 50% penetration rate was effective. Tientrakool 29 finds that capacity improves little until the CACC penetration rate exceeds 85%. Shladover 30 reports that capacity improves linearly from 2,000 to 2,300 vphpl at 50% CACC, but then increases non-linearly and reaches nearly 4,000 vphpl at 100% CACC. In summary, based on simulations to-date, Adaptive Cruise Control by itself does not appear to have significant impacts on capacity; however, when the vehicles are allowed to communicate and cooperate with each other, there are significant impacts when the fleet mix exceeds 50% CACC. 2. Operating Parameters Human drivers tend to uniquely vary their acceleration, deceleration and following distance. Drivers tend to accelerate more slowly than they decelerate, which is one of the reasons bottlenecks occur. They also have preferences with respect to car following, and those preferences can vary. As well, drivers vary in how quickly they react to vehicles slowing down ahead of them. Autonomous vehicles can improve traffic flow and freeway capacity by (1) keeping these parameters constant, and (2) allowing for faster, more tightly spaced vehicles. Most practitioners are aware of the classic relationship between traffic flow and density shown in Figure 2. As the traffic volume increases, headway tends to decrease and become more constant (i.e., the distribution has a smaller standard deviation). At some point, headways reach a minimum, density reaches a critical maximum (aka optimal density ), drivers slow down and a traffic jam occurs, greatly reducing the capacity of a segment. If automated vehicles operate at lower headways, then maximum throughputs could generally increase (Figure 3a). Conversely, a more conservative headway would result in the opposite impact on capacity (Figure 3b). In fact, some experiments 31 have noted that if these vehicles operate at lower speeds in order to achieve a more stable flow, they could reduce the capacity of a bottleneck and increase delay and travel time. 28 L. C. Davis. Effect of Adaptive Cruise Control Systems on Mixed Traffic Flow Near an On-Ramp. Physics Department, University of Michigan. Ann Arbor, Michigan, Patcharinee Tientrakool, Ya-Chi Ho, and Nicholas F. Maxemchuk. Highway Capacity Benefits from Using Vehicleto-Vehicle Communication and Sensors for Collision Avoidance. Vehicular Technology Conference (VTC Fall). San Francisco, California, September Steven E. Shladover. Highway Capacity Increases from Automated Driving. California PATH Program, July Kerner, B. S., Control of spatial-temporal congested traffic patterns at highway bottlenecks. condmat/ , e-print in the electronic archive 24
28 Flow (veh/hour/lane) Flow (veh/hour/lane) FP Think: Effects of Next-Generation Vehicles on Travel Demand and Highway Capacity February 2014 In addition to headway and speed benefits, autonomous vehicle response can reduce disruption effects and improve laminar flow. If vehicles are programmed to optimize at least two of the three factors (speed, headway, uniformity) within the parameter ranges currently being tested, they re likely to achieve capacity benefits. Figure 3. Theoretical Impacts of A) Lower Headway and B) Higher Headway on Traffic Flow a Density (veh/mile/lane) b Density (veh/mile/lane) While the exact operating characteristics of automated vehicle technologies are proprietary and unknown, we expect both automakers and the consumer market to initially prefer automated vehicles with adaptive cruise control that favors headways comfortable to the vast majority of drivers. They will also implement the technology conservatively, due in part to potential liability (the 2009 Toyota recall that resulted in over a billion dollars in lawsuits due to a series of collisions that were ultimately determined to be mostly unrelated to technical issues 32 ) and uncertainty with which owners will base their purchases on implementation results. For example, it is not clear how buyers will react to recent IIHS tests that exposed 32 Burkhard Bilger. Auto Correct: Has the Self-Driving Car at Last Arrived? November 25,
29 crash avoidance technology on several vehicles that did not avoid the crash. 33 Even the Google car, with more autonomous miles that any other vehicle, is currently programmed to drive less aggressively than people, at headways generally higher than two seconds. 32 On the consumer side, Shladover et al. 34 [7] found that when commuters were given vehicles with autonomous technology and asked to choose from several headway options, they chose the headway that most closely matched their own driving behavior. When applied to a freeway simulation, those headways showed no freeway capacity benefit. Perhaps as consumers become more accustomed to the vehicle dynamics and less in control of the driving task, vehicle headways can be reduced, and speed can increase. Part of the reason the huge capacity benefit with CACC vehicles is plausible is they can safely travel with very low headways (0.5 seconds or lower) and higher speeds. Shladover et al. found that drivers, when convinced their vehicles were in a safe platoon, were content to allow substantially lower headways than those of manual operation, and that when those choices were applied to their freeway simulation model, freeway capacity increased significantly. 3. Duration and Size of Recurring and Non-Recurring Congestion Autonomous vehicles could increase segment capacity though lower headways and thus reduce duration and size of recurring congestion. Connected vehicles could hold much greater benefits. Connected vehicles will likely be able to change lanes, merge and diverge more smoothly than human drivers, and the consistency of headways will increase the ability for traffic flow to remain stable in dense conditions. This could particularly delay the onset of congestion caused by the instability and inefficiency of ramp junctions. On-ramp traffic will likely remain metered (though ramp meter signals may give way to vehicleto-infrastructure (V2I) communication) to maintain freeway stability but as a higher percentage of the fleet becomes autonomous and connected, metering rates and ramp junction capacity will increase. 33 IIHS website, September Steven E. Shladover, Dongyan Su, and Xiao-Yun Lu. Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow. Transportation Research Board 91st Annual Meeting. Washington, D.C., January
30 Connected vehicles could similarly reduce the duration and size of non-recurring congestion resulting from an incident by reducing the frequency of disruptions from collision clearance and rubbernecking. While there is high hope and expectation that AVs will avoid collisions, there is still some uncertainty on the degree to which fully autonomous vehicles will reduce the possibility of incidents altogether Cooperative Automation We have noted that literature suggests a high fleet mix of connected vehicles is required to achieve substantial freeway capacity improvements. The capacity benefits come from improved operating parameters, and from the fact that these vehicles could be programmed for the benefit of system performance rather than purely for the perceived good of the individual. The benefits to system performance would be particularly large at weaving segments, where autonomous technology alone has limited benefits. However, a high fleet mix of cooperative vehicles is needed largely because the vehicles need to be in relatively close proximity, and the chance that any two vehicles are connected is the fleet mix squared. Autonomous vehicles alone may provide limited capacity benefits in the future through their operating parameters, but the evidence suggests that conservative parameter programming and low fleet penetration of cooperative V2V vehicles could actually reduce capacity initially. Similar conclusions could be made about impacts on the actual duration and size of congestion, although there are additional important considerations of how connected vehicles could potentially influence the frequency and impact of non-recurring events. C. Our Experiment Fehr & Peers conducted a series of freeway simulations in VISSIM to get an initial estimate of the impacts of adaptive cruise control (ACC) on capacity. The simulation case represents the performance of individual vehicle technologies, capable of sensing the situation several cars ahead and alongside, but not connected V2V or V2I technology, or cooperative adaptive cruise control (CACC). A simple congested freeway network was developed. A corridor was developed with seven segments, including basic (mainline), diverge (off-ramp), and merge (on-ramp) types. 35 It is worth noting that levels of autonomy below 4 could result in cockpit automation, in which reliance on automation to perform a set of tasks limits pilot experience and erodes skills when manual control is required, as has happened in the airline industry (see Cockpit Automation: Difference Engine: Crash Program? August 26th, 2013). Cockpit automation may somewhat offset otherwise expected reductions in incidents due to automated vehicles. 27
31 Rather than create an ACC vehicle from scratch, we modified the existing Wiedemann 99 model within VISSIM. 36 Commercial ACC systems and their car-following logic are proprietary; we therefore opted to initially develop conservative and aggressive scenarios that represent a wide range of possible ACC characteristics. The conservative scenario is characterized by higher headways and lower acceleration/deceleration rates than the base assumptions for manual operation, whereas the aggressive scenario is characterized by the opposite set of assumptions (additional details on simulation assumptions are in Appendix B). In both cases, we tested scenarios with 50% of the fleet assumed to be operating with ACC. The results on freeway efficiency are shown in Table 4. As expected, the conservative scenario results in an increase in both delay and travel time, while the aggressive scenario results in the opposite outcome relative to the base scenario. Additional details are in Appendix B. TABLE 4. PRELIMINARY VISSIM SIMULATION RESULTS FREEWAY PERFORMANCE RELATIVE TO BASELINE WITH CONSERVATIVE AND AGGRESSIVE ACC SCENARIOS Performance Baseline 50% Conservative 50% Aggressive Total Delay [hours] 100% 205% 54% Average Delay per Vehicle [seconds] 100% 213% 56% Total Travel Time [hours] 100% 112% 94% After validating the direction of capacity changes associated with adjustments to the car following model parameters, we then simulated an intermediate ACC scenario at different fleet penetrations (Table 5). At a 10% fleet penetration, no change is observed. At a 50% fleet penetration, some improvements are observed but they are marginal. Even at a 75% fleet penetration, the improvements are minor. 36 The Wiedemann 99 car following model was developed in 1999 to model freeway conditions. According to the VISSIM manual, the traffic flow model is a discrete, stochastic, time step based, microscopic model with drivervehicle-units as single entities. The model contains a psycho-physical car following model for longitudinal vehicle movement and a rule-based algorithm for lateral movements. 28
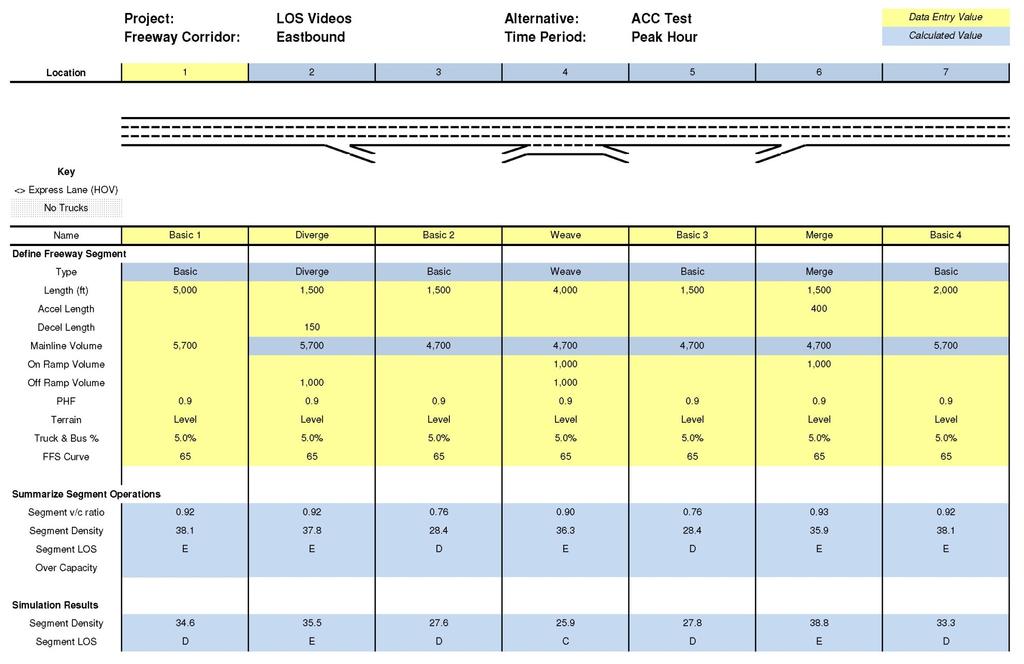
32 TABLE 5. PRELIMINARY VISSIM SIMULATION RESULTS FREEWAY PERFORMANCE RELATIVE TO BASELINE WITH INTERMEDIATE ACC Performance Baseline 10% Intermediate 50% Intermediate 75% Intermediate Total Delay [hours] 100% 100% 95% 69% Average Delay per Vehicle [seconds] 100% 100% 100% 75% Total Travel Time [hours] 100% 100% 99% 96% On a Level of Service (LOS) basis, the overall impacts of any ACC scenario are also marginal. The most noticeable impact on LOS occurs in the segment upstream of a bottleneck, in which there is substantially more congestion in the 50% conservative case but substantially less congestion in the 50% aggressive and 75% intermediate scenarios. This finding is consistent with the impacts of headways described in the previous section on maximum throughput at bottlenecks and queue lengths behind the bottleneck. See Appendix B for LOS results. Given the uncertainty surrounding actual operations of automated vehicle technology, these results are not meant to represent our predictions but are rather meant to illustrate the range of possible outcomes and a general lack of improvement in freeway capacity associated with ACC alone. Since only the car following model was adjusted in this preliminary analysis and most freeway congestion is caused by lane changing at on-ramps or weaving segments, larger impacts to capacity could be captured in future simulations that account for potential improvements in lane changing. For example, a simulation conducted by Kesting et al. 37 found that ACC vehicles could significantly reduce congestion at an on-ramp bottleneck, even at low fleet penetrations. More dramatic improvements would be expected with a high penetration of connected vehicles that could both platoon at extremely low headways and communicate/anticipate speed changes. D. Conclusions Our clients are asking if automated vehicles should be considered as an alternative in long range plans. Our answer, for the moment, is maybe but probably not. Long range transportation infrastructure plans are currently examining scenarios in 2035 or Even though the technologies and regulatory 37 Arne Kesting, Martin Treiber, Martin Schonhof, and Dirk Helbing. Adaptive Cruise Control Design for Active Congestion Avoidance. Transportation Research Part C: Emerging Technologies. Volume 16, Issue 6, December 2008, Pages
33 framework may be in place to allow autonomous operation on freeways in the early 2020s, significant market penetration of fully autonomous vehicles could take decades longer, as was the case with airbags. VTPI 38 predicts it will be 2050/2060 before automated vehicles achieve a 50 to 75% share of the vehicle fleet, which is the penetration rate at which capacity will be impacted by automated vehicles different driving behavior. However, as discussed in Chapter 2 above, under circumstances such as government mandated vehicle autonomy as a new vehicle safety feature, and an automobile industry shift away from the present auto ownership model to a subscription model, 50% market penetration may occur as early as Will automated vehicles change freeway capacity? Our conclusion is perhaps, but unlikely within the time frame of current long range plans. Our initial tests indicate a high percentage of vehicles with Adaptive Cruise Control do not significantly change capacity of a freeway segment in one direction or another. Of course, this is our own car following model. Until automakers open the books on their own models, there is some uncertainty. Others have demonstrated that with Autonomous and Connected Vehicles (so car X knows what is happening 10 cars ahead), you can have significant capacity increases. That is plausible; however, the "Connected" technology in autonomous vehicles is on a slower market penetration trajectory (all 10 cars need to have V2V technology), and we have little confidence it will play a significant role in mixed flow freeway traffic by In summary, we project the following factors will dictate the effectiveness of autonomous vehicles in improving freeway capacity over the next 20 to 40 years. 38 Littman, Todd. Autonomous Vehicle Implementation Predictions - Implications for Transport Planning, available through Victoria Transport Policy Institute, December
34 EFFECTS OF AUTONOMOUS VEHICLES ON FREEWAY CAPACITY AND CONGESTION Capacity Benefit Potential Reasons for Optimism When fleet mix approaches 100% (V2V* 39 ), freeway lane capacity could reach 4,000 vphpl, double the present capacity Reasons to Reign in Enthusiasm Capacity benefits are likely to occur only on freeways initially (pre-2030) and will only begin to be apparent when the fleet mix is at least 40% (V2V* 40 ) autonomous Driver Acceptance Drivers will be convinced through experience that they are safe in closely-spaced automated freeway platoons Driver comfort with close vehicle following headways is a critical concern. In tests of ACC, most chose headways that closely matched their own driving behavior, resulting in little capacity benefit, though CCAC may change this Early Wins With high fleet penetration, efficiency and capacity of weaving at ramp junctions and adjacent freeway segments could be markedly improved, even before headway functions are perfected for line haul freeway segments. On line-haul freeway segments, our VISSIM tests indicate that capacity of freeway segments would be significantly reduced with conservative AV parameter programming. Capacity benefits at locations other than freeways may be many decades away. Speed of Adoption Given the high stakes, 41 interests including the automakers, Google and other tech companies and universities are ambitiously refining the technology and machine-learning algorithms. They may achieve our aggressive parameter capabilities and high fleet penetration sooner than our projected time frame. Per our VISSIM tests, aggressive programming could reduce vehicle delays by about 45% once half the fleet is operating autonomously. Even with higher-level technology capabilities vehicle occupants may not become comfortable with aggressive performance. Intermediate parameter settings require 75% autonomous fleet mix to achieve moderately high capacity benefit (25-30%). 39 Some of the literature suggests that this type of capacity improvement is theoretically possible without V2V technology, though a more common opinion is that V2V technology would be required given uncertainties related to the programming of autonomous vehicles. 40 Ibid 41 In addition to the business-sector incentive, public stakes are extremely high as well. Morgan Stanley s paper 'Self- Driving the New Auto Industry Paradigm' finds that autonomous cars can contribute $1.3 trillion in annual savings to the US economy. 31
35 REFERENCES CITED AND FURTHER READING Littman, Todd. Autonomous Vehicle Implementation Predictions - Implications for Transport Planning, available through Victoria Transport Policy Institute, December
36 APPENDIX A: Simulation Analysis Assumptions
37
Activity-Travel Behavior Impacts of Driverless Cars
 January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
3/16/2016. How Our Cities Can Plan for Driverless Cars April 2016
 How Our Cities Can Plan for Driverless Cars April 2016 1 They re coming The state of autonomous vehicle technology seems likely to advance with or without legislative and agency actions at the federal
How Our Cities Can Plan for Driverless Cars April 2016 1 They re coming The state of autonomous vehicle technology seems likely to advance with or without legislative and agency actions at the federal
Autonomous Vehicle Implementation Predictions Implications for Transport Planning
 Autonomous Vehicle Implementation Predictions Implications for Transport Planning Todd Litman Victoria Transport Policy Institute Workshop 188 Activity-Travel Behavioral Impacts and Travel Demand Modeling
Autonomous Vehicle Implementation Predictions Implications for Transport Planning Todd Litman Victoria Transport Policy Institute Workshop 188 Activity-Travel Behavioral Impacts and Travel Demand Modeling
Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems
 Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems Podcar City 7 Symposium Emerging Transportation Technologies R&D George Mason University, October
Opportunities to Leverage Advances in Driverless Car Technology to Evolve Conventional Bus Transit Systems Podcar City 7 Symposium Emerging Transportation Technologies R&D George Mason University, October
Self-Driving Cars: The Next Revolution. Los Angeles Auto Show. November 28, Gary Silberg National Automotive Sector Leader KPMG LLP
 Self-Driving Cars: The Next Revolution Los Angeles Auto Show November 28, 2012 Gary Silberg National Automotive Sector Leader KPMG LLP 0 Our point of view 1 Our point of view: Self-Driving cars may be
Self-Driving Cars: The Next Revolution Los Angeles Auto Show November 28, 2012 Gary Silberg National Automotive Sector Leader KPMG LLP 0 Our point of view 1 Our point of view: Self-Driving cars may be
Safety Considerations of Autonomous Vehicles. Darren Divall Head of International Road Safety TRL
 Safety Considerations of Autonomous Vehicles Darren Divall Head of International Road Safety TRL TRL History Autonomous Vehicles TRL Self-driving car, 1960s Testing partial automation, TRL, 2000s Testing
Safety Considerations of Autonomous Vehicles Darren Divall Head of International Road Safety TRL TRL History Autonomous Vehicles TRL Self-driving car, 1960s Testing partial automation, TRL, 2000s Testing
Funding Scenario Descriptions & Performance
 Funding Scenario Descriptions & Performance These scenarios were developed based on direction set by the Task Force at previous meetings. They represent approaches for funding to further Task Force discussion
Funding Scenario Descriptions & Performance These scenarios were developed based on direction set by the Task Force at previous meetings. They represent approaches for funding to further Task Force discussion
Planning for AUTONOMOUS VEHICLES. Presentation on the planning implications of self-driving vehicles. by Ryan Snyder Transportation Planning Expert
 Planning for AUTONOMOUS VEHICLES Presentation on the planning implications of self-driving vehicles. by Ryan Snyder Transportation Planning Expert LEVELS OF AV TECHNOLOGY LEVEL 1 LEVEL 4 function-specific
Planning for AUTONOMOUS VEHICLES Presentation on the planning implications of self-driving vehicles. by Ryan Snyder Transportation Planning Expert LEVELS OF AV TECHNOLOGY LEVEL 1 LEVEL 4 function-specific
Intelligent Vehicle Systems
 Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
The Road to Automated Vehicles. Audi of America Government Affairs
 The Road to Automated Vehicles Audi of America Government Affairs 10.2017 A new future? 100 years of vertical autonomy It took 40 years to change FATALITIES Elevator: 31 per year Vehicles: 100 per day
The Road to Automated Vehicles Audi of America Government Affairs 10.2017 A new future? 100 years of vertical autonomy It took 40 years to change FATALITIES Elevator: 31 per year Vehicles: 100 per day
The Future is Bright! So how do we get there? Council of State Governments West Annual Meeting August 18, 2017
 The Future is Bright! So how do we get there? Council of State Governments West Annual Meeting August 18, 2017 1 The Intersection of Technology Transportation options that were once a fantasy are now reality:
The Future is Bright! So how do we get there? Council of State Governments West Annual Meeting August 18, 2017 1 The Intersection of Technology Transportation options that were once a fantasy are now reality:
WHITE PAPER. Preventing Collisions and Reducing Fleet Costs While Using the Zendrive Dashboard
 WHITE PAPER Preventing Collisions and Reducing Fleet Costs While Using the Zendrive Dashboard August 2017 Introduction The term accident, even in a collision sense, often has the connotation of being an
WHITE PAPER Preventing Collisions and Reducing Fleet Costs While Using the Zendrive Dashboard August 2017 Introduction The term accident, even in a collision sense, often has the connotation of being an
Development of California Regulations for Testing and Operation of Automated Driving Systems
 Development of California Regulations for Testing and Operation of Automated Driving Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California,
Development of California Regulations for Testing and Operation of Automated Driving Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California,
Transforming Mobility: Business Models in the Age of Autonomous Vehicles
 Industries > Automotive Transforming Mobility: Business Models in the Age of Autonomous Vehicles We consider the future of autonomous vehicles and its transformative effect on mobility models Industries
Industries > Automotive Transforming Mobility: Business Models in the Age of Autonomous Vehicles We consider the future of autonomous vehicles and its transformative effect on mobility models Industries
MOBILITY AND THE SHARED ECONOMY
 MOBILITY AND THE SHARED ECONOMY IT S THE END OF MOBILITY AS WE KNOW IT SHOULD WE FEEL FINE?» Sharing economy grows rapidly and disrupts classical mobility, but with ambiguous and uncertain effects» Automated
MOBILITY AND THE SHARED ECONOMY IT S THE END OF MOBILITY AS WE KNOW IT SHOULD WE FEEL FINE?» Sharing economy grows rapidly and disrupts classical mobility, but with ambiguous and uncertain effects» Automated
Welcome to the 4th Annual UCF Urban and Regional Planning Distinguished Lecture Series
 UNIVERSITY OF CENTRAL FLORIDA ORLANDO SCHOOL OF PUBLIC ADMINISTRATION Welcome to the 4th Annual UCF Urban and Regional Planning Distinguished Lecture Series - April 24, 2016 UCF SCHOOL OF PUBLIC ADMINISTRATION
UNIVERSITY OF CENTRAL FLORIDA ORLANDO SCHOOL OF PUBLIC ADMINISTRATION Welcome to the 4th Annual UCF Urban and Regional Planning Distinguished Lecture Series - April 24, 2016 UCF SCHOOL OF PUBLIC ADMINISTRATION
Application of Autonomous Vehicle Technology to Public Transit
 Application of Autonomous Vehicle Technology to Public Transit University Transportation Research Center 2014 Ground Transportation Technology Symposium November 19, 2014 Jerome M. Lutin, Ph.D., P.E. Senior
Application of Autonomous Vehicle Technology to Public Transit University Transportation Research Center 2014 Ground Transportation Technology Symposium November 19, 2014 Jerome M. Lutin, Ph.D., P.E. Senior
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
Disruptive Technology and Mobility Change
 Disruptive Technology and Mobility Change What it Might Mean for Urban Transportation Ed Regan Senior Vice President June 1, 2018 Presented at Transport Chicago Ed Regan, SVP, CDM Smith 43-year veteran
Disruptive Technology and Mobility Change What it Might Mean for Urban Transportation Ed Regan Senior Vice President June 1, 2018 Presented at Transport Chicago Ed Regan, SVP, CDM Smith 43-year veteran
Application of Autonomous Driving Technology to Transit
 Application of Autonomous Driving Technology to Transit 2013 ITS New Jersey Annual Conference MetLife Stadium December 16, 2013 Jerome M. Lutin, Ph.D., P.E. Senior Director, Statewide & Regional Planning
Application of Autonomous Driving Technology to Transit 2013 ITS New Jersey Annual Conference MetLife Stadium December 16, 2013 Jerome M. Lutin, Ph.D., P.E. Senior Director, Statewide & Regional Planning
Robots on Our Roads: The Coming Revolution in Mobility. Ohio Planning Conference July 27, 2016 Richard Bishop
 Robots on Our Roads: The Coming Revolution in Mobility Ohio Planning Conference July 27, 2016 Richard Bishop Myths! The roads need to be changed to make automated driving possible. WRONG! All vehicles
Robots on Our Roads: The Coming Revolution in Mobility Ohio Planning Conference July 27, 2016 Richard Bishop Myths! The roads need to be changed to make automated driving possible. WRONG! All vehicles
Our Approach to Automated Driving System Safety. February 2019
 Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Our Approach to Automated Driving System Safety February 2019 Introduction At Apple, by relentlessly pushing the boundaries of innovation and design, we believe that it is possible to dramatically improve
Autonomous Vehicles: Status, Trends and the Large Impact on Commuting
 Autonomous Vehicles: Status, Trends and the Large Impact on Commuting Barrie Kirk, P.Eng. Executive Director, Canadian Automated Vehicles Centre of Excellence Presentation to ACT Canada October 26, 2016
Autonomous Vehicles: Status, Trends and the Large Impact on Commuting Barrie Kirk, P.Eng. Executive Director, Canadian Automated Vehicles Centre of Excellence Presentation to ACT Canada October 26, 2016
Impact of Autonomous Vehicles on a Typical Canadian City
 Impact of Autonomous Vehicles on a Typical Canadian City Barrie Kirk, P.Eng. Paul Godsmark May 27, 2013 Globis Consulting ITSC ACGM May 2013 2 Globis Consulting ITSC ACGM May 2013 3 Globis Consulting ITSC
Impact of Autonomous Vehicles on a Typical Canadian City Barrie Kirk, P.Eng. Paul Godsmark May 27, 2013 Globis Consulting ITSC ACGM May 2013 2 Globis Consulting ITSC ACGM May 2013 3 Globis Consulting ITSC
The Value of Travel-Time: Estimates of the Hourly Value of Time for Vehicles in Oregon 2007
 The Value of Travel-Time: Estimates of the Hourly Value of Time for Vehicles in Oregon 2007 Oregon Department of Transportation Long Range Planning Unit June 2008 For questions contact: Denise Whitney
The Value of Travel-Time: Estimates of the Hourly Value of Time for Vehicles in Oregon 2007 Oregon Department of Transportation Long Range Planning Unit June 2008 For questions contact: Denise Whitney
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
2016 Car Tech Impact Study. January 2016
 2016 Car Tech Impact Study January 2016 Objectives & Methodology Objectives Identify vehicle technologies that are currently being used and that are must haves for future vehicle purchases Determine how
2016 Car Tech Impact Study January 2016 Objectives & Methodology Objectives Identify vehicle technologies that are currently being used and that are must haves for future vehicle purchases Determine how
AND CHANGES IN URBAN MOBILITY PATTERNS
 TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
TECHNOLOGY-ENABLED MOBILITY: Virtual TEsting of Autonomous Vehicles AND CHANGES IN URBAN MOBILITY PATTERNS Technology-Enabled Mobility In the era of the digital revolution everything is inter-connected.
Autonomous Vehicles. Kevin Lacy, PE, State Traffic Engineer
 Autonomous Vehicles Kevin Lacy, PE, State Traffic Engineer Nomenclature Connected Vehicles Vehicles Connected to: Each other sending information to each other about speed, braking, other information needed
Autonomous Vehicles Kevin Lacy, PE, State Traffic Engineer Nomenclature Connected Vehicles Vehicles Connected to: Each other sending information to each other about speed, braking, other information needed
What do autonomous vehicles mean to traffic congestion and crash? Network traffic flow modeling and simulation for autonomous vehicles
 What do autonomous vehicles mean to traffic congestion and crash? Network traffic flow modeling and simulation for autonomous vehicles FINAL RESEARCH REPORT Sean Qian (PI), Shuguan Yang (RA) Contract No.
What do autonomous vehicles mean to traffic congestion and crash? Network traffic flow modeling and simulation for autonomous vehicles FINAL RESEARCH REPORT Sean Qian (PI), Shuguan Yang (RA) Contract No.
Course Syllabus. Time Requirements. Course Timeline. Grading Policy. Contact Information Online classroom Instructor: Kyle Boots
 Course Syllabus Course Overview This course is designed to meet the classroom requirement of your driver s education experience. It is approved by the State of Indiana. Time Requirements The State of Indiana
Course Syllabus Course Overview This course is designed to meet the classroom requirement of your driver s education experience. It is approved by the State of Indiana. Time Requirements The State of Indiana
Travel Time Savings Memorandum
 04-05-2018 TABLE OF CONTENTS 1 Background 3 Methodology 3 Inputs and Calculation 3 Assumptions 4 Light Rail Transit (LRT) Travel Times 5 Auto Travel Times 5 Bus Travel Times 6 Findings 7 Generalized Cost
04-05-2018 TABLE OF CONTENTS 1 Background 3 Methodology 3 Inputs and Calculation 3 Assumptions 4 Light Rail Transit (LRT) Travel Times 5 Auto Travel Times 5 Bus Travel Times 6 Findings 7 Generalized Cost
October 15, 2015 Traffic Engineering and Safety Conference Champaign, IL
 October 15, 2015 Traffic Engineering and Safety Conference Champaign, IL NHTSA defines vehicle automation as having five levels: No-Automation (Level 0): The driver is in complete and sole control of the
October 15, 2015 Traffic Engineering and Safety Conference Champaign, IL NHTSA defines vehicle automation as having five levels: No-Automation (Level 0): The driver is in complete and sole control of the
AUTOMATED VEHICLES AND TRANSIT
 AUTOMATED VEHICLES AND TRANSIT 2017 OPTC Conference Oct. 3, 2017 Pendleton, OR Andrew Dick, CAEV Advisor 2 1 94% of motor vehicle crashes are primarily caused by human error motor vehicle deaths in U.S.,
AUTOMATED VEHICLES AND TRANSIT 2017 OPTC Conference Oct. 3, 2017 Pendleton, OR Andrew Dick, CAEV Advisor 2 1 94% of motor vehicle crashes are primarily caused by human error motor vehicle deaths in U.S.,
Brain on Board: From safety features to driverless cars
 Brain on Board: From safety features to driverless cars Robyn Robertson, M.C.A. President & CEO Traffic Injury Research Foundation 18 th Annual Not By Accident Conference. London, ON, October 18 th, 2016
Brain on Board: From safety features to driverless cars Robyn Robertson, M.C.A. President & CEO Traffic Injury Research Foundation 18 th Annual Not By Accident Conference. London, ON, October 18 th, 2016
Road Vehicle Automation: Distinguishing Reality from Hype
 Road Vehicle Automation: Distinguishing Reality from Hype Steven E. Shladover, Sc.D. California PATH Program University of California, Berkeley March 20, 2014 1 Outline Historical development of automation
Road Vehicle Automation: Distinguishing Reality from Hype Steven E. Shladover, Sc.D. California PATH Program University of California, Berkeley March 20, 2014 1 Outline Historical development of automation
The Implications of Automated Vehicles for the Public Transit Industry
 The Implications of Automated Vehicles for the Public Transit Industry June 22, 2016 Presentation to I-95 Corridor Coalition Jerome M. Lutin, Ph.D., P.E. Senior Director of Statewide & Regional Planning
The Implications of Automated Vehicles for the Public Transit Industry June 22, 2016 Presentation to I-95 Corridor Coalition Jerome M. Lutin, Ph.D., P.E. Senior Director of Statewide & Regional Planning
The Status of Transportation Funding, Road Charge and Vehicle Miles Traveled in California
 The Status of Transportation Funding, Road Charge and Vehicle Miles Traveled in California Long-Term Policy Options for Sustainable Transportation Options NCSL State Transportation Leaders Symposium October
The Status of Transportation Funding, Road Charge and Vehicle Miles Traveled in California Long-Term Policy Options for Sustainable Transportation Options NCSL State Transportation Leaders Symposium October
Autonomous Vehicles in California. Brian G. Soublet Deputy Director Chief Counsel California Department of Motor Vehicles
 Autonomous Vehicles in California Brian G. Soublet Deputy Director Chief Counsel California Department of Motor Vehicles 1 The Vision of the Future Advertisement from 1957 Independent Electric Light and
Autonomous Vehicles in California Brian G. Soublet Deputy Director Chief Counsel California Department of Motor Vehicles 1 The Vision of the Future Advertisement from 1957 Independent Electric Light and
ROADMAP TO VEHICLE CONNECTIVITY
 ROADMAP TO VEHICLE CONNECTIVITY September 2018 CONTACT INFORMATION If you have any questions about this report, please contact: Scott Belcher, SFB Consulting, LLC scottfbelcher@gmail.com (703) 447-0263
ROADMAP TO VEHICLE CONNECTIVITY September 2018 CONTACT INFORMATION If you have any questions about this report, please contact: Scott Belcher, SFB Consulting, LLC scottfbelcher@gmail.com (703) 447-0263
China New Mobility Study 2015
 China New Mobility Study 15 Copyright 15 Bain & Company, Inc. All rights reserved. Executive summary Car owners in China s mega-cities are rethinking the value of car ownership. As rapid urbanization transforms
China New Mobility Study 15 Copyright 15 Bain & Company, Inc. All rights reserved. Executive summary Car owners in China s mega-cities are rethinking the value of car ownership. As rapid urbanization transforms
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Autonomous Vehicle Implementation Predictions
 Autonomous Vehicle Implementation Predictions Todd Litman Victoria Transport Policy Institute Presented DTU Transport Summit Copenhagen, Denmark 31 May 2018 Past Visions of Future Transport 1949 ConvAIRCAR
Autonomous Vehicle Implementation Predictions Todd Litman Victoria Transport Policy Institute Presented DTU Transport Summit Copenhagen, Denmark 31 May 2018 Past Visions of Future Transport 1949 ConvAIRCAR
EVOLUTION OF MOBILITY: FOUR PREDICTIONS FOR THE FUTURE
 EVOLUTION OF MOBILITY: FOUR PREDICTIONS FOR THE FUTURE 1 The Evolution of Mobility Study Series Phase I Consumer attitudes about the changing mobility landscape Perceptions and perceived need for traditional
EVOLUTION OF MOBILITY: FOUR PREDICTIONS FOR THE FUTURE 1 The Evolution of Mobility Study Series Phase I Consumer attitudes about the changing mobility landscape Perceptions and perceived need for traditional
The Renewable Energy Market Investment Opportunities In Lithium. Prepared by: MAC Energy Research
 The Renewable Energy Market Investment Opportunities In Lithium Prepared by: MAC Energy Research 2016 Table of Contents: Introduction. Page 2 What is Lithium?... Page 2 Global Lithium Demand Page 3 Energy
The Renewable Energy Market Investment Opportunities In Lithium Prepared by: MAC Energy Research 2016 Table of Contents: Introduction. Page 2 What is Lithium?... Page 2 Global Lithium Demand Page 3 Energy
THE WAY TO HIGHLY AUTOMATED DRIVING.
 December 15th, 2014. THE WAY TO HIGHLY AUTOMATED DRIVING. DR. WERNER HUBER, HEAD OF DRIVER ASSISTANCE AND PERCEPTION AT BMW GROUP RESEARCH AND TECHNOLOGY. AUTOMATION IS AN ESSENTIAL FEATURE OF THE INTELLIGENT
December 15th, 2014. THE WAY TO HIGHLY AUTOMATED DRIVING. DR. WERNER HUBER, HEAD OF DRIVER ASSISTANCE AND PERCEPTION AT BMW GROUP RESEARCH AND TECHNOLOGY. AUTOMATION IS AN ESSENTIAL FEATURE OF THE INTELLIGENT
Transportation Demand Management Element
 Transportation Demand Management Element Over the years, our reliance on the private automobile as our primary mode of transportation has grown substantially. Our dependence on the automobile is evidenced
Transportation Demand Management Element Over the years, our reliance on the private automobile as our primary mode of transportation has grown substantially. Our dependence on the automobile is evidenced
Aging of the light vehicle fleet May 2011
 Aging of the light vehicle fleet May 211 1 The Scope At an average age of 12.7 years in 21, New Zealand has one of the oldest light vehicle fleets in the developed world. This report looks at some of the
Aging of the light vehicle fleet May 211 1 The Scope At an average age of 12.7 years in 21, New Zealand has one of the oldest light vehicle fleets in the developed world. This report looks at some of the
PROMOTING THE UPTAKE OF ELECTRIC AND OTHER LOW EMISSION VEHICLES
 Chair Cabinet Economic Growth and Infrastructure Committee Office of the Minister of Transport Office of the Minister of Energy and Resources PROMOTING THE UPTAKE OF ELECTRIC AND OTHER LOW EMISSION VEHICLES
Chair Cabinet Economic Growth and Infrastructure Committee Office of the Minister of Transport Office of the Minister of Energy and Resources PROMOTING THE UPTAKE OF ELECTRIC AND OTHER LOW EMISSION VEHICLES
AVs and Transit. Stephen Buckley, P.E., AICP NACV Summit June 12, 2018
 AVs and Transit Stephen Buckley, P.E., AICP NACV Summit June 12, 2018 New Mobility Connected Automated Electric Shared Source: WSP, 2017. Source: Google, 2014. The Promise of AVs Improved road safety More
AVs and Transit Stephen Buckley, P.E., AICP NACV Summit June 12, 2018 New Mobility Connected Automated Electric Shared Source: WSP, 2017. Source: Google, 2014. The Promise of AVs Improved road safety More
Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future.
 Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future. Eugene A. Petersen Tire Program Manager-CR For over
Active Safety Systems in Cars -Many semi-automated safety features are available today in new cars. -Building blocks for automated cars in the future. Eugene A. Petersen Tire Program Manager-CR For over
HOW DATA CAN INFORM DESIGN
 HOW DATA CAN INFORM DESIGN Automakers are missing a chance to cut costs on product development by reducing reliance on trial-and-error WHEN AUTOMAKERS THINK about customer data, they usually focus on how
HOW DATA CAN INFORM DESIGN Automakers are missing a chance to cut costs on product development by reducing reliance on trial-and-error WHEN AUTOMAKERS THINK about customer data, they usually focus on how
Model Legislation for Autonomous Vehicles (2018)
") Model Legislation for Autonomous Vehicles (2018) What is the Self-Driving Coalition for Safer Streets? The Self-Driving Coalition for Safer Streets was formed by Ford, Lyft, Volvo Cars, Uber, and Waymo
Model Legislation for Autonomous Vehicles (2018) What is the Self-Driving Coalition for Safer Streets? The Self-Driving Coalition for Safer Streets was formed by Ford, Lyft, Volvo Cars, Uber, and Waymo
The Age of Vehicle Automation: Opportunities for Transportation Providers. BusCon 2017 Indianapolis, Indiana September 12, 2017
 The Age of Vehicle Automation: Opportunities for Transportation Providers BusCon 2017 Indianapolis, Indiana September 12, 2017 About WSP (formerly WSP Parsons Brinckerhoff) Global professional services
The Age of Vehicle Automation: Opportunities for Transportation Providers BusCon 2017 Indianapolis, Indiana September 12, 2017 About WSP (formerly WSP Parsons Brinckerhoff) Global professional services
Automated driving in urban environments: technical challenges, open problems and barriers. Fawzi Nashashibi
 Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
Automated driving in urban environments: technical challenges, open problems and barriers Fawzi Nashashibi 6th Workshop on Planning, Perception and Navigation for Intelligent Vehicles SEPTEMBER 14, 2014
BMW GROUP DIALOGUE. HANGZHOU 2017 TAKE AWAYS.
 BMW GROUP DIALOGUE. HANGZHOU 2017 TAKE AWAYS. BMW GROUP DIALOGUE. CONTENT. A B C Executive Summary: Top Stakeholder Expert Perceptions & Recommendations from Hangzhou Background: Mobility in Hangzhou 2017,
BMW GROUP DIALOGUE. HANGZHOU 2017 TAKE AWAYS. BMW GROUP DIALOGUE. CONTENT. A B C Executive Summary: Top Stakeholder Expert Perceptions & Recommendations from Hangzhou Background: Mobility in Hangzhou 2017,
Denver Car Share Program 2017 Program Summary
 Denver Car Share Program 2017 Program Summary Prepared for: Prepared by: Project Manager: Malinda Reese, PE Apex Design Reference No. P170271, Task Order #3 January 2018 Table of Contents 1. Introduction...
Denver Car Share Program 2017 Program Summary Prepared for: Prepared by: Project Manager: Malinda Reese, PE Apex Design Reference No. P170271, Task Order #3 January 2018 Table of Contents 1. Introduction...
May 8, Docket Management Facility U.S. Department of Transportation 1200 New Jersey Avenue, SE Room W Washington, DC
 May 8, 2018 Docket Management Facility U.S. Department of Transportation 1200 New Jersey Avenue, SE Room W12-140 Washington, DC 20590-0001 RE: Federal Motor Carrier Safety Regulations which may be a Barrier
May 8, 2018 Docket Management Facility U.S. Department of Transportation 1200 New Jersey Avenue, SE Room W12-140 Washington, DC 20590-0001 RE: Federal Motor Carrier Safety Regulations which may be a Barrier
Fueling Savings: Higher Fuel Economy Standards Result In Big Savings for Consumers
 Fueling Savings: Higher Fuel Economy Standards Result In Big Savings for Consumers Prepared for Consumers Union September 7, 2016 AUTHORS Tyler Comings Avi Allison Frank Ackerman, PhD 485 Massachusetts
Fueling Savings: Higher Fuel Economy Standards Result In Big Savings for Consumers Prepared for Consumers Union September 7, 2016 AUTHORS Tyler Comings Avi Allison Frank Ackerman, PhD 485 Massachusetts
1. Thank you for the opportunity to comment on the Low Emissions Economy Issues Paper ( Issues Paper ).
.") 20 September 2017 Low-emissions economy inquiry New Zealand Productivity Commission PO Box 8036 The Terrace Wellington 6143 info@productivity.govt.nz Dear Commission members, Re: Orion submission on Low
20 September 2017 Low-emissions economy inquiry New Zealand Productivity Commission PO Box 8036 The Terrace Wellington 6143 info@productivity.govt.nz Dear Commission members, Re: Orion submission on Low
Future Funding The sustainability of current transport revenue tools model and report November 2014
 Future Funding The sustainability of current transport revenue tools model and report November 214 Ensuring our transport system helps New Zealand thrive Future Funding: The sustainability of current transport
Future Funding The sustainability of current transport revenue tools model and report November 214 Ensuring our transport system helps New Zealand thrive Future Funding: The sustainability of current transport
Predicted availability of safety features on registered vehicles a 2015 update
 Highway Loss Data Institute Bulletin Vol. 32, No. 16 : September 2015 Predicted availability of safety features on registered vehicles a 2015 update Prior Highway Loss Data Institute (HLDI) studies have
Highway Loss Data Institute Bulletin Vol. 32, No. 16 : September 2015 Predicted availability of safety features on registered vehicles a 2015 update Prior Highway Loss Data Institute (HLDI) studies have
Future Freight Transportation
 Future Freight Transportation presented by Edward McCormack - University of Washington Mark Jensen Cambridge Systematics 2 Truck Platooning Concept Truck Platooning: The Need Driver Shortage» Truck driver
Future Freight Transportation presented by Edward McCormack - University of Washington Mark Jensen Cambridge Systematics 2 Truck Platooning Concept Truck Platooning: The Need Driver Shortage» Truck driver
Written Testimony of Josh Fisher Manager, State Government Affairs, Association of Global Automakers, before the Ohio House Transportation and Public
 Written Testimony of Josh Fisher Manager, State Government Affairs, Association of Global Automakers, before the Ohio House Transportation and Public Safety Committee October 4, 2017 Testimony Chairman
Written Testimony of Josh Fisher Manager, State Government Affairs, Association of Global Automakers, before the Ohio House Transportation and Public Safety Committee October 4, 2017 Testimony Chairman
Road fatalities in 2012
 Lithuania 1 Inhabitants Vehicles/1 000 inhabitants Road fatalities in 2012 Fatalities /100 000 inhabitants in 2012 2.98 million 751 301 10.1 1. Road safety data collection Definitions Road fatality: person
Lithuania 1 Inhabitants Vehicles/1 000 inhabitants Road fatalities in 2012 Fatalities /100 000 inhabitants in 2012 2.98 million 751 301 10.1 1. Road safety data collection Definitions Road fatality: person
Service Quality: Higher Ridership: Very Affordable: Image:
 Over the past decade, much attention has been placed on the development of Bus Rapid Transit (BRT) systems. These systems provide rail-like service, but with buses, and are typically less expensive to
Over the past decade, much attention has been placed on the development of Bus Rapid Transit (BRT) systems. These systems provide rail-like service, but with buses, and are typically less expensive to
Policy Options to Decarbonise Urban Passenger Transport
 Policy Options to Decarbonise Urban Passenger Transport Results of expert opinion survey Guineng Chen, ITF/OECD 19 April 2018 2 INTRODUCTION The expert survey is part of the ITF Decarbonising Transport
Policy Options to Decarbonise Urban Passenger Transport Results of expert opinion survey Guineng Chen, ITF/OECD 19 April 2018 2 INTRODUCTION The expert survey is part of the ITF Decarbonising Transport
No Longer Science Fiction: The Risks and Rewards of Autonomous Vehicles FOR010
 No Longer Science Fiction: The Risks and Rewards of Autonomous Vehicles FOR010 Speakers: Mike Stankard, Managing Director and Automotive Industry Practice Leader, Aon Alan Gier, Global Director, Risk Management
No Longer Science Fiction: The Risks and Rewards of Autonomous Vehicles FOR010 Speakers: Mike Stankard, Managing Director and Automotive Industry Practice Leader, Aon Alan Gier, Global Director, Risk Management
FUEL ECONOMY STANDARDS: THERE IS NO TRADEOFF WITH SAFETY, COST, AND FLEET TURNOVER. July 24, 2018 UPDATE. Jack Gillis Executive Director
 FUEL ECONOMY STANDARDS: THERE IS NO TRADEOFF WITH SAFETY, COST, AND FLEET TURNOVER July 24, 2018 UPDATE The Consumer Federation of America is an association of more than 250 non-profit consumer groups
FUEL ECONOMY STANDARDS: THERE IS NO TRADEOFF WITH SAFETY, COST, AND FLEET TURNOVER July 24, 2018 UPDATE The Consumer Federation of America is an association of more than 250 non-profit consumer groups
Planning for Autonomous Vehicles. Stephen Buckley WSP Parsons Brinckerhoff KINETIC October 6, 2016
 Planning for Autonomous Vehicles Stephen Buckley WSP Parsons Brinckerhoff KINETIC October 6, 2016 When will we see AVs on our roads? 0-2 Years 2-5 Years 5-10 Years 10-15 Years 15+ Years 2 Overview Background
Planning for Autonomous Vehicles Stephen Buckley WSP Parsons Brinckerhoff KINETIC October 6, 2016 When will we see AVs on our roads? 0-2 Years 2-5 Years 5-10 Years 10-15 Years 15+ Years 2 Overview Background
DOE s Focus on Energy Efficient Mobility Systems
 DOE s Focus on Energy Efficient Mobility Systems David L. Anderson Energy Efficient Mobility Systems Program Vehicle Technologies Office Automated Vehicle Symposium San Francisco, California July 13, 2017
DOE s Focus on Energy Efficient Mobility Systems David L. Anderson Energy Efficient Mobility Systems Program Vehicle Technologies Office Automated Vehicle Symposium San Francisco, California July 13, 2017
Track: Data and Innovation
 MEET THE JETSONS Track: Data and Innovation In the not so distant future, connected and autonomous vehicles will change the way we travel, with impacts for cities, transportation agencies, and YOU. What
MEET THE JETSONS Track: Data and Innovation In the not so distant future, connected and autonomous vehicles will change the way we travel, with impacts for cities, transportation agencies, and YOU. What
Autonomous Automated and Connected Vehicles
 Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
emover AMBIENT MOBILITY Jens Dobberthin Fraunhofer Institute for Industrial Engineering IAO e : t :
 emover Developing an intelligent, connected, cooperative and versatile e-minibus fleet to complement privately owned vehicles and public transit More and more people in cities are consciously choosing
emover Developing an intelligent, connected, cooperative and versatile e-minibus fleet to complement privately owned vehicles and public transit More and more people in cities are consciously choosing
RIETI BBL Seminar Handout
 Research Institute of Economy, Trade and Industry (RIETI) RIETI BBL Seminar Handout Autonomous Vehicles, Infrastructure Policy, and Economic Growth September 25, 2018 Speaker: Clifford Winston https://www.rieti.go.jp/jp/index.html
Research Institute of Economy, Trade and Industry (RIETI) RIETI BBL Seminar Handout Autonomous Vehicles, Infrastructure Policy, and Economic Growth September 25, 2018 Speaker: Clifford Winston https://www.rieti.go.jp/jp/index.html
Policy considerations for reducing fuel use from passenger vehicles,
 Policy considerations for reducing fuel use from passenger vehicles, 2025-2035 NRC Phase 3 Project Scope CAVs: Assess how shifts in personal transportation and vehicle ownership models might evolve out
Policy considerations for reducing fuel use from passenger vehicles, 2025-2035 NRC Phase 3 Project Scope CAVs: Assess how shifts in personal transportation and vehicle ownership models might evolve out
Aria Etemad Volkswagen Group Research. Key Results. Aachen 28 June 2017
 Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
Aria Etemad Volkswagen Group Research Key Results Aachen 28 June 2017 28 partners 2 // 28 June 2017 AdaptIVe Final Event, Aachen Motivation for automated driving functions Zero emission Reduction of fuel
Planning for Autonomous Vehicles
 Photo courtesy Waymo, a self-driving technology company at Alphabet Inc. Downloaded 10/16/2017 Planning for Autonomous Vehicles Transportation Policy Committee November 15, 2017 2017, All Rights Reserved.
Photo courtesy Waymo, a self-driving technology company at Alphabet Inc. Downloaded 10/16/2017 Planning for Autonomous Vehicles Transportation Policy Committee November 15, 2017 2017, All Rights Reserved.
Application of Autonomous Driving Technology to Transit - Functional Capabilities for Safety and Capacity
 Application of Autonomous Driving Technology to Transit - Functional Capabilities for Safety and Capacity Presentation to Federal Transit Administration and American Public Transportation Association July
Application of Autonomous Driving Technology to Transit - Functional Capabilities for Safety and Capacity Presentation to Federal Transit Administration and American Public Transportation Association July
UTA Transportation Equity Study and Staff Analysis. Board Workshop January 6, 2018
 UTA Transportation Equity Study and Staff Analysis Board Workshop January 6, 2018 1 Executive Summary UTA ranks DART 6 th out of top 20 Transit Agencies in the country for ridership. UTA Study confirms
UTA Transportation Equity Study and Staff Analysis Board Workshop January 6, 2018 1 Executive Summary UTA ranks DART 6 th out of top 20 Transit Agencies in the country for ridership. UTA Study confirms
2016 Congestion Report
 2016 Congestion Report Metropolitan Freeway System May 2017 2016 Congestion Report 1 Table of Contents Purpose and Need...3 Introduction...3 Methodology...4 2016 Results...5 Explanation of Percentage Miles
2016 Congestion Report Metropolitan Freeway System May 2017 2016 Congestion Report 1 Table of Contents Purpose and Need...3 Introduction...3 Methodology...4 2016 Results...5 Explanation of Percentage Miles
Mobility Disruptors Perception, Intention and Aspiration of Chinese Consumers
 Mobility Disruptors Perception, Intention and Aspiration of Chinese Consumers Electrification Connectivity Ride-sharing Automation Feb 2018 Based on Key Findings of J.D. Power China Pulse Surveys on Mobility
Mobility Disruptors Perception, Intention and Aspiration of Chinese Consumers Electrification Connectivity Ride-sharing Automation Feb 2018 Based on Key Findings of J.D. Power China Pulse Surveys on Mobility
Connected and Automated Vehicle Activities in the United States
 U.S. Department of Transportation Connected and Automated Vehicle Activities in the United States SIP-adus Workshop on Connected and Automated Driving Systems Kevin Dopart Automation Program Manager, U.S.
U.S. Department of Transportation Connected and Automated Vehicle Activities in the United States SIP-adus Workshop on Connected and Automated Driving Systems Kevin Dopart Automation Program Manager, U.S.
Intelligent Mobility for Smart Cities
 Intelligent Mobility for Smart Cities A/Prof Hussein Dia Centre for Sustainable Infrastructure CRICOS Provider 00111D @HusseinDia Outline Explore the complexity of urban mobility and how the convergence
Intelligent Mobility for Smart Cities A/Prof Hussein Dia Centre for Sustainable Infrastructure CRICOS Provider 00111D @HusseinDia Outline Explore the complexity of urban mobility and how the convergence
Continental Mobility Study Klaus Sommer Hanover, December 15, 2011
 Klaus Sommer Hanover, December 15, 2011 Content International requirements and expectations for E-Mobility Urbanization What are the challenges of individual mobility for international megacities? What
Klaus Sommer Hanover, December 15, 2011 Content International requirements and expectations for E-Mobility Urbanization What are the challenges of individual mobility for international megacities? What
AUTONOMOUS VEHICLES Nevada Dept. of Motor Vehicles
 AUTONOMOUS VEHICLES Nevada Dept. of Motor Vehicles Autonomous Vehicles Quick History Review The 2011 Nevada Legislation Session, SB 511 authorized the testing and operation of autonomous vehicles and required
AUTONOMOUS VEHICLES Nevada Dept. of Motor Vehicles Autonomous Vehicles Quick History Review The 2011 Nevada Legislation Session, SB 511 authorized the testing and operation of autonomous vehicles and required
CONNECTED PROPULSION - THE FUTURE IS NOW
 MOTOR & UMWELT 2018 ENGINE & ENVIRONMENT 2018 CONNECTED PROPULSION - THE FUTURE IS NOW Larry Nitz General Motors 9 We re at a transformative time in automotive history, but a lot of innovation is already
MOTOR & UMWELT 2018 ENGINE & ENVIRONMENT 2018 CONNECTED PROPULSION - THE FUTURE IS NOW Larry Nitz General Motors 9 We re at a transformative time in automotive history, but a lot of innovation is already
Metropolitan Freeway System 2013 Congestion Report
 Metropolitan Freeway System 2013 Congestion Report Metro District Office of Operations and Maintenance Regional Transportation Management Center May 2014 Table of Contents PURPOSE AND NEED... 1 INTRODUCTION...
Metropolitan Freeway System 2013 Congestion Report Metro District Office of Operations and Maintenance Regional Transportation Management Center May 2014 Table of Contents PURPOSE AND NEED... 1 INTRODUCTION...
Automotive Research and Consultancy WHITE PAPER
 Automotive Research and Consultancy WHITE PAPER e-mobility Revolution With ARC CVTh Automotive Research and Consultancy Page 2 of 16 TABLE OF CONTENTS Introduction 5 Hybrid Vehicle Market Overview 6 Brief
Automotive Research and Consultancy WHITE PAPER e-mobility Revolution With ARC CVTh Automotive Research and Consultancy Page 2 of 16 TABLE OF CONTENTS Introduction 5 Hybrid Vehicle Market Overview 6 Brief
AUTONOMY AND SMART URBAN MOBILITY
 AUTONOMY AND SMART URBAN MOBILITY November 15, 2017 Emilio Frazzoli Professor of Dynamic Systems and Control, ETH Zürich Co-Founder and CTO Why Self-driving Vehicles? A financial perspective on personal
AUTONOMY AND SMART URBAN MOBILITY November 15, 2017 Emilio Frazzoli Professor of Dynamic Systems and Control, ETH Zürich Co-Founder and CTO Why Self-driving Vehicles? A financial perspective on personal
Regulatory Treatment Of Recoating Costs
 Regulatory Treatment Of Recoating Costs Prepared for the INGAA Foundation, Inc., by: Brown, Williams, Scarbrough & Quinn, Inc. 815 Connecticut Ave., N.W. Suite 750 Washington, DC 20006 F-9302 Copyright
Regulatory Treatment Of Recoating Costs Prepared for the INGAA Foundation, Inc., by: Brown, Williams, Scarbrough & Quinn, Inc. 815 Connecticut Ave., N.W. Suite 750 Washington, DC 20006 F-9302 Copyright
NEW HAVEN HARTFORD SPRINGFIELD RAIL PROGRAM
 NEW HAVEN HARTFORD SPRINGFIELD RAIL PROGRAM Hartford Rail Alternatives Analysis www.nhhsrail.com What Is This Study About? The Connecticut Department of Transportation (CTDOT) conducted an Alternatives
NEW HAVEN HARTFORD SPRINGFIELD RAIL PROGRAM Hartford Rail Alternatives Analysis www.nhhsrail.com What Is This Study About? The Connecticut Department of Transportation (CTDOT) conducted an Alternatives
Breakout Session. The Mobility Challenges of Our Growing & Sprawling Upstate
 Breakout Session The Mobility Challenges of Our Growing & Sprawling Upstate The Mobility Challenges of Our Growing & Sprawling Upstate Why is our suburban and sprawling development pattern a challenge
Breakout Session The Mobility Challenges of Our Growing & Sprawling Upstate The Mobility Challenges of Our Growing & Sprawling Upstate Why is our suburban and sprawling development pattern a challenge
Urban Mobility at the crossroads: social megatrends, tech options, policy choices
 Urban Mobility at the crossroads: social megatrends, tech options, policy choices José Viegas Secretary-General International Transport Forum At the FIA Mobility Conference Week The Hague, 13th September
Urban Mobility at the crossroads: social megatrends, tech options, policy choices José Viegas Secretary-General International Transport Forum At the FIA Mobility Conference Week The Hague, 13th September
EVOLUTION OF MOBILITY: AUTONOMOUS VEHICLES
 EVOLUTION OF MOBILITY: AUTONOMOUS VEHICLES Passenger Miles Traveled Mass Adoption of Autonomous Vehicles is the Inflection Point for a Shift in Mobility 6 TODAY 4 0 % R E D U C T I O N I N C O N S U M
EVOLUTION OF MOBILITY: AUTONOMOUS VEHICLES Passenger Miles Traveled Mass Adoption of Autonomous Vehicles is the Inflection Point for a Shift in Mobility 6 TODAY 4 0 % R E D U C T I O N I N C O N S U M
Support Material Agenda Item No. 3
 Support Material Agenda Item No. 3 Board of Directors Workshop October 19, 2017, 12:30 PM Location Lake Arrowhead Resort and Spa 27984 Highway 189, 1 st Floor, Arrowhead Ballroom Lake Arrowhead, CA Agenda
Support Material Agenda Item No. 3 Board of Directors Workshop October 19, 2017, 12:30 PM Location Lake Arrowhead Resort and Spa 27984 Highway 189, 1 st Floor, Arrowhead Ballroom Lake Arrowhead, CA Agenda
Summary FEBRUARY 2019
 Summary FEBRUARY 2019 The Mobility Choice Blueprint is a unique planning and funding partnership of the Denver Metro Chamber, DRCOG, CDOT, and RTD Here s how our region looks and feels in 2030 if we simply
Summary FEBRUARY 2019 The Mobility Choice Blueprint is a unique planning and funding partnership of the Denver Metro Chamber, DRCOG, CDOT, and RTD Here s how our region looks and feels in 2030 if we simply
More persons in the cars? Status and potential for change in car occupancy rates in Norway
 Author(s): Liva Vågane Oslo 2009, 57 pages Norwegian language Summary: More persons in the cars? Status and potential for change in car occupancy rates in Norway Results from national travel surveys in
Author(s): Liva Vågane Oslo 2009, 57 pages Norwegian language Summary: More persons in the cars? Status and potential for change in car occupancy rates in Norway Results from national travel surveys in
Ensuring the safety of automated vehicles
 Ensuring the safety of automated vehicles Alan Stevens Workshop on Verification and Validation for Autonomous Road Vehicles 4 Nov 2016 1 Agenda / Table of contents 1 2 3 Planning trials and safety Estimating
Ensuring the safety of automated vehicles Alan Stevens Workshop on Verification and Validation for Autonomous Road Vehicles 4 Nov 2016 1 Agenda / Table of contents 1 2 3 Planning trials and safety Estimating
Procurement notes for councils (Scotland)
") Procurement notes for councils (Scotland) Reasons for establishing a car club in your area There are two main reasons for local authorities looking to establish a car club: 1. Community benefits of increasing
Procurement notes for councils (Scotland) Reasons for establishing a car club in your area There are two main reasons for local authorities looking to establish a car club: 1. Community benefits of increasing