Introduction to Robotics
|
|
|
- Thomas Benson
- 5 years ago
- Views:
Transcription


1 Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Research Center Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du colonel Roche Toulouse, France Topics Introduction Locomotion Kinematics of Mobile Robots Perception Navigation Localization Path Planning Task Planning 1
2 Locomotion is the complement of manipulation Study of actuators that generate interaction forces, and mechanisms that implement desired kinematic and dynamic properties. Locomotion and manipulation share as issues: stability, contact characteristics, and environmental type. 2
3 stability number and geometry of contact points center of gravity static/dynamic stability inclination of terrain characteristics of contact: contact point/path size and shape angle of contact friction 3
4 Type of environment Structure medium (e.g. water, air, soft or hard ground) Theory of locomotion includes: Mathematics, Mechanics Physics 4
5 To be able to do certain task a robot must be able to move in the environment Two main problems Given some inputs how the robot is going to move? (kinematics) Which inputs are required to move a robot to a given position or with desirable movement? (inverse kinematics) The field of study where the forces involved are modeled is Dynamics Energy and Forces associated with movements Different Mobile Robots in: Terrestrial Aquatic Aerial Space 5
6 Characterized by a series of contact points between the robot and the ground. Advantages: include adaptability and maneuverability in rough terrain. Disadvantages of legged locomotion include power and mechanical complexity Insects 6 or more legs Mammals and reptiles 4 legs Some mammals (Humans) 2 legs Humans can jump in one leg complex active control to maintain balance 6
7 Adding degrees of freedom to a robot leg increases the maneuverability of the robot Disadvantages: energy, control, and mass. Additional actuators require energy and control, and they also add to leg mass, further increasing power and load requirements on existing actuators. The number of possible gaits depends on the number of legs The gait is a sequence of lift and release events for the individual legs. For a mobile robot with k legs, the total number of possible events N for a walking machine is: N = 2k 1 ( )! 7
8 For a mobile robot with 2 legs, there are 6 possible events : N = ( 2k 1)!= 3!= = 6 lift right leg, lift left leg release right leg, release left leg lift both legs together, release both legs together. 8
9 Static walking with six legs. A tripod formed by three legs always exists. 9
10 Minimize the number of legs Mass Legs coordination Legged robots can cross a gap Easier when they have less legs Jump and running Two legged robots have been shown to: run, jump, travel up and down stairways, and even do aerial tricks such as somersaults 10



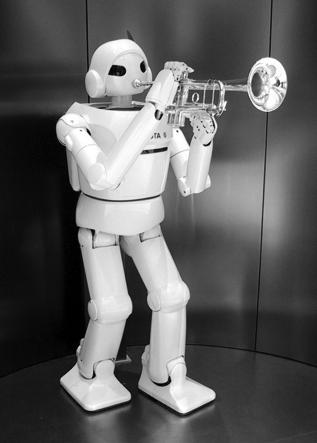
11 Honda Asimo HRP2, HRP3, HRP4 Sony Qrio Toyota 11


12 Aldebaran NAO and ROMEO Four legs Standing is passively stable Walking is challenging because to remain stable the robot s center of gravity must be actively shifted during the gait 12
13 Six legs Static stability reducing the control complexity In most cases, each leg has three degrees of freedom, including hip flexion, knee flexion, and hip abduction relatively simple mechanical implementation balance is not (usually) a problem all wheels are in ground contact Other problems: traction and stability, maneuverability, and control 13
14 The four basic wheel types: (a) Standard wheel: two degrees of freedom; rotation around the (motorized) wheel axle and the contact point. (b) castor wheel: two degrees of freedom; rotation around an offset steering joint. The four basic wheel types: (c) Swedish wheel: three degrees of freedom; rotation around the (motorized) wheel axle, around the rollers, and around the contact point. (d) Ball or spherical wheel: realization technically difficult. 14




15 Standard wheels and castor wheel Swedish wheels 15


16 Balls or spherical wheels Rotation x d y 16
17 Small speeds d is negligible We use odometry to estimate robot s motion Simple case, the distance traveled by the wheel is: 2πr The Instantaneous Center of Curvature (ICC) must coincide with the axes of rotation of each wheel in contact ICC should not only exist, but each wheel must describe a movement consistent with a rotation of the vehicle around the ICC 17
18 ICC A Wheeled robot in the plane has three degrees of freedom (x, y, θ) Position (x, y) Orientation θ The robot doesn t independent control over this DoF 18
19 Robot can t change arbitrary their position Changes depend on orientation Holonomic restrictions Sometimes castor wheels are required Kinematics undone We are going to focus on: Traction and stability Maneuverability Control We are not deal with balance 19
20 The choice of wheel types for a mobile robot is strongly linked to the choice of wheel arrangement, or wheel geometry When design What type of wheels? and Which geometry? The choices are in function of: maneuverability, controllability, and stability. Ackerman wheel configuration (used in cars) is not a solution for mobile robots because it has poor maneuverability 20
21 2 wheels One steering wheel in the front, one traction wheel in the rear Two-wheel differential drive with the center of mass (COM) below the axle The minimum of wheel required to have stability is two Stability is achieved if the center of mass is below the axis of the wheels Under ordinary conditions, wheel diameter is impractical Robots with two wheels can hit the ground due to torque 21


22 Static stability it is requires 3 wheels The center of gravity must be contained in the triangle formed by the three contact points Stability can be improved by adding more wheels The hyper-static nature of geometry requires flexible suspension on roughly terrain 22
23 3 wheels Two-wheel centered differential drive with a third point of contact Two independently driven wheels in the rear/front, 1 unpowered omnidirectional wheel in the front/rear 3 wheels Two connected traction wheels (differential) in rear, 1 steered free wheel in front Two free wheels in rear, 1 steered traction wheel in front 23
24 3 wheels Three motorized Swedish or spherical wheels arranged in a triangle; omnidirectional movement is possible Three synchronously motorized and steered wheels; the orientation is not controllable 4 wheels Two motorized wheels in the rear, 2 steered wheels in the front; steering has to be different for the 2 wheels to avoid slipping/ skidding. Two motorized and steered wheels in the front, 2 free wheels in the rear; steering has to be different for the 2 wheels to avoid slipping/skidding. 24
25 4 wheels Four steered and motorized wheels Two traction wheels (differential) in rear/front, 2 omnidirectional wheels in the front/rear 4 wheels Four omnidirectional wheels Two-wheel differential drive with 2 additional points of contact 25
26 4 wheels Four motorized and steered castor wheels 6 wheels Two motorized and steered wheels aligned in center, 1 omnidirectional wheel at each corner Two traction wheels (differential) in center, 1 omnidirectional wheel at each corner 26


27 Maneuverability Omnidireccional robots Swedish or spherical wheels Maneuverability Four drive castor wheels All controlled in traction and turn 27
 PR2 by")

28 Maneuverability Pioneer by Adept Robotics (former Active Media Robotics) PR2 by Willow Garage Maneuverability Four drive castor wheels All controlled in traction and turn 28
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Last week we saw. Today: The Role of Locomotion : Robotics systems and science Lecture 4: Locomotion
 6.141: Robotics systems and science Lecture 4: Locomotion Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2009 Last week we saw Bang-bang control Open loop control Closed loop control: P, I, D Motors
6.141: Robotics systems and science Lecture 4: Locomotion Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2009 Last week we saw Bang-bang control Open loop control Closed loop control: P, I, D Motors
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Mobile Robots Introduction and Lecture Overview
 ASL Autonomous Systems Lab Mobile Robots Introduction and Lecture Overview Autonomous Mobile Robots Roland Siegwart Margarita Chli, Paul Furgale, Marco Hutter, Martin Rufli, Davide Scaramuzza Autonomous
ASL Autonomous Systems Lab Mobile Robots Introduction and Lecture Overview Autonomous Mobile Robots Roland Siegwart Margarita Chli, Paul Furgale, Marco Hutter, Martin Rufli, Davide Scaramuzza Autonomous
Week 11. Module 5: EE100 Course Project Making your first robot
 Week 11 Module 5: EE100 Course Project Making your first robot Dr. Ing. Ahmad Kamal Nasir Office Hours: Room 9-245A Tuesday (1000-1100) Wednesday (1500-1600) Course Project: Wall-Follower Robot Week 1
Week 11 Module 5: EE100 Course Project Making your first robot Dr. Ing. Ahmad Kamal Nasir Office Hours: Room 9-245A Tuesday (1000-1100) Wednesday (1500-1600) Course Project: Wall-Follower Robot Week 1
CORC Exploring Robotics. Unit B: Construction
 CORC 3303 Exploring Robotics Unit B: Construction Effectors and Actuators An effector is a device on a robot that has an impact or influence on the environment. An actuator is the mechanism that enables
CORC 3303 Exploring Robotics Unit B: Construction Effectors and Actuators An effector is a device on a robot that has an impact or influence on the environment. An actuator is the mechanism that enables
SPMM OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000?
 SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
Enhancing Wheelchair Mobility Through Dynamics Mimicking
 Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
SPMM OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000?
 SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Drive Essentials. robot. -Andy Baker
 Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities
 Research Collection Conference Paper ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities Author(s): Hoepflinger, Mark H.; Baschung, David; Remy, C. D.; Hutter, Marco; Siegwart,
Research Collection Conference Paper ParcelBot A Tracked Parcel Transporter with High Obstacle Negotiation Capabilities Author(s): Hoepflinger, Mark H.; Baschung, David; Remy, C. D.; Hutter, Marco; Siegwart,
The Design of an Omnidirectional All-Terrain Rover Chassis
 The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
The Design of an Omnidirectional All-Terrain Rover Chassis Abstract Submission for TePRA 2011: the 3rd Annual IEEE International Conference on Technologies for Practical Robot Applications Timothy C. Lexen,
MECA0492 : Vehicle dynamics
 MECA0492 : Vehicle dynamics Pierre Duysinx Research Center in Sustainable Automotive Technologies of University of Liege Academic Year 2017-2018 1 Bibliography T. Gillespie. «Fundamentals of vehicle Dynamics»,
MECA0492 : Vehicle dynamics Pierre Duysinx Research Center in Sustainable Automotive Technologies of University of Liege Academic Year 2017-2018 1 Bibliography T. Gillespie. «Fundamentals of vehicle Dynamics»,
Wheeled Robotic Mobility. Dimi Apostolopoulos
 Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
Wheeled Robotic Mobility Dimi Apostolopoulos Significance of Mobility Move Position Transport Employ instruments and tools React to work loads in a controllable fashion ROBOTIC MOBILITY Dimi Apostolopoulos
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE
 WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
WORK PARTNER - HUT-AUTOMATION S NEW HYBRID WALKING MACHINE Ilkka Leppänen, Sami Salmi and Aarne Halme Automation Technology Laboratory Helsinki University of Technology PL 3000, 02015 HUT, Finland E-mail
Case Studies on NASA Mars Rover s Mobility System
 Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Case Studies on NASA Mars Rover s Mobility System Shih-Liang (Sid) Wang 1 Abstract Motion simulation files based on Working Model 2D TM are developed to simulate Mars rover s mobility system. The rover's
Soft Actuation for Humanoids
 Soft Actuation for Humanoids Nikos Tsagarakis Humanoid & Human Centred Mechatronics Lab Dept. of Advanced Robotics Istituto Italiano di Tecnologia (IIT) 7th Workshop on Humanoid Soccer Robots IEEE Ihumanoids
Soft Actuation for Humanoids Nikos Tsagarakis Humanoid & Human Centred Mechatronics Lab Dept. of Advanced Robotics Istituto Italiano di Tecnologia (IIT) 7th Workshop on Humanoid Soccer Robots IEEE Ihumanoids
Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators. By: J. Islam & Tiffany Stephenson
 Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators By: J. Islam & Tiffany Stephenson Components That Enable A Robots Actions Effector: Device that makes impact/influence on
Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators By: J. Islam & Tiffany Stephenson Components That Enable A Robots Actions Effector: Device that makes impact/influence on
Torque steer effects resulting from tyre aligning torque Effect of kinematics and elastokinematics
 P refa c e Tyres of suspension and drive 1.1 General characteristics of wheel suspensions 1.2 Independent wheel suspensions- general 1.2.1 Requirements 1.2.2 Double wishbone suspensions 1.2.3 McPherson
P refa c e Tyres of suspension and drive 1.1 General characteristics of wheel suspensions 1.2 Independent wheel suspensions- general 1.2.1 Requirements 1.2.2 Double wishbone suspensions 1.2.3 McPherson
A CASTOR WHEEL CONTROLLER FOR DIFFERENTIAL DRIVE WHEELCHAIRS
 A CASTOR WHEEL CONTROLLER FOR DIFFERENTIAL DRIVE WHEELCHAIRS Bernd Gersdorf Safe and Secure Cognitive Systems, German Research Center for Artificial Intelligence, Bremen, Germany bernd.gersdorf@dfki.de
A CASTOR WHEEL CONTROLLER FOR DIFFERENTIAL DRIVE WHEELCHAIRS Bernd Gersdorf Safe and Secure Cognitive Systems, German Research Center for Artificial Intelligence, Bremen, Germany bernd.gersdorf@dfki.de
1 Configuration Space Path Planning
 CS 4733, Class Notes 1 Configuration Space Path Planning Reference: 1) A Simple Motion Planning Algorithm for General Purpose Manipulators by T. Lozano-Perez, 2) Siegwart, section 6.2.1 Fast, simple to
CS 4733, Class Notes 1 Configuration Space Path Planning Reference: 1) A Simple Motion Planning Algorithm for General Purpose Manipulators by T. Lozano-Perez, 2) Siegwart, section 6.2.1 Fast, simple to
Suspension systems and components
 Suspension systems and components 2of 42 Objectives To provide good ride and handling performance vertical compliance providing chassis isolation ensuring that the wheels follow the road profile very little
Suspension systems and components 2of 42 Objectives To provide good ride and handling performance vertical compliance providing chassis isolation ensuring that the wheels follow the road profile very little
Experimental Validation of Stable Obstacle Climbing with a Four-Wheel Mobile Robot OpenWHEEL
 al Validation of Stable Obstacle with a Four-Wheel Mobile Robot OpenWHEEL i3r Jean-Christophe.Fauroux@ifma.fr Belhassen-Chedli.Bouzgarrou@ifma.fr Frederic.Chapelle@ifma.fr Clermont-Ferrand, France LaMI
al Validation of Stable Obstacle with a Four-Wheel Mobile Robot OpenWHEEL i3r Jean-Christophe.Fauroux@ifma.fr Belhassen-Chedli.Bouzgarrou@ifma.fr Frederic.Chapelle@ifma.fr Clermont-Ferrand, France LaMI
Assemblies for Parallel Kinematics. Frank Dürschmied. INA reprint from Werkstatt und Betrieb Vol. No. 5, May 1999 Carl Hanser Verlag, München
 Assemblies for Parallel Kinematics Frank Dürschmied INA reprint from Werkstatt und Betrieb Vol. No. 5, May 1999 Carl Hanser Verlag, München Assemblies for Parallel Kinematics Frank Dürschmied Joints and
Assemblies for Parallel Kinematics Frank Dürschmied INA reprint from Werkstatt und Betrieb Vol. No. 5, May 1999 Carl Hanser Verlag, München Assemblies for Parallel Kinematics Frank Dürschmied Joints and
Exoskeleton Robot DesignBased on Multi-body Dynamics Simulation
 Exoskeleton Robot DesignBased on Multi-body Dynamics Simulation Chao Wang a, Guozhu Duan, Jie Xiao China North Vehicle Research Institute Beijing, China acwang21@163.com Abstract In order to implement
Exoskeleton Robot DesignBased on Multi-body Dynamics Simulation Chao Wang a, Guozhu Duan, Jie Xiao China North Vehicle Research Institute Beijing, China acwang21@163.com Abstract In order to implement
SuperQuest Salem Arms Best Practices
 SuperQuest Salem Arms Best Practices VEX Arm Designs Single 4-Bar 6-Bar 8-Bar Linear Slide Scissor Double Reverse 4-Bar Single Arms Arms These manipulators consist of a pivot point and at least 1 motor.
SuperQuest Salem Arms Best Practices VEX Arm Designs Single 4-Bar 6-Bar 8-Bar Linear Slide Scissor Double Reverse 4-Bar Single Arms Arms These manipulators consist of a pivot point and at least 1 motor.
MARITIME AFTERNOON. Torben Ole Andersen. June 14, 2017 Aalborg University, Denmark
 MARITIME AFTERNOON HYDRAULICS Torben Ole Andersen June 14, 2017 Aalborg University, Denmark Agenda Marine Propellers Digital Hydraulics in a Hydraulic Winch Secondary Control in of Multi -Chamber Cylinders
MARITIME AFTERNOON HYDRAULICS Torben Ole Andersen June 14, 2017 Aalborg University, Denmark Agenda Marine Propellers Digital Hydraulics in a Hydraulic Winch Secondary Control in of Multi -Chamber Cylinders
NEW DESIGN AND DEVELELOPMENT OF ESKIG MOTORCYCLE
 NEW DESIGN AND DEVELELOPMENT OF ESKIG MOTORCYCLE Eskinder Girma PG Student Department of Automobile Engineering, M.I.T Campus, Anna University, Chennai-44, India. Email: eskindergrm@gmail.com Mobile no:7299391869
NEW DESIGN AND DEVELELOPMENT OF ESKIG MOTORCYCLE Eskinder Girma PG Student Department of Automobile Engineering, M.I.T Campus, Anna University, Chennai-44, India. Email: eskindergrm@gmail.com Mobile no:7299391869
Design and Analysis of suspension system components
 Design and Analysis of suspension system components Manohar Gade 1, Rayees Shaikh 2, Deepak Bijamwar 3, Shubham Jambale 4, Vikram Kulkarni 5 1 Student, Department of Mechanical Engineering, D Y Patil college
Design and Analysis of suspension system components Manohar Gade 1, Rayees Shaikh 2, Deepak Bijamwar 3, Shubham Jambale 4, Vikram Kulkarni 5 1 Student, Department of Mechanical Engineering, D Y Patil college
Introducing Galil's New H-Bot Firmware
 March-16 Introducing Galil's New H-Bot Firmware There are many applications that require movement in planar space, or movement along two perpendicular axes. This two dimensional system can be fitted with
March-16 Introducing Galil's New H-Bot Firmware There are many applications that require movement in planar space, or movement along two perpendicular axes. This two dimensional system can be fitted with
DEVELOPMENT OF A CONTROL MODEL FOR A FOUR WHEEL MECANUM VEHICLE. M. de Villiers 1, Prof. G. Bright 2
 de Villiers Page 1 of 10 DEVELOPMENT OF A CONTROL MODEL FOR A FOUR WHEEL MECANUM VEHICLE M. de Villiers 1, Prof. G. Bright 2 1 Council for Scientific and Industrial Research Pretoria, South Africa e-mail1:
de Villiers Page 1 of 10 DEVELOPMENT OF A CONTROL MODEL FOR A FOUR WHEEL MECANUM VEHICLE M. de Villiers 1, Prof. G. Bright 2 1 Council for Scientific and Industrial Research Pretoria, South Africa e-mail1:
SAE Mini BAJA: Suspension and Steering
 SAE Mini BAJA: Suspension and Steering By Zane Cross, Kyle Egan, Nick Garry, Trevor Hochhaus Team 11 Progress Report Submitted towards partial fulfillment of the requirements for Mechanical Engineering
SAE Mini BAJA: Suspension and Steering By Zane Cross, Kyle Egan, Nick Garry, Trevor Hochhaus Team 11 Progress Report Submitted towards partial fulfillment of the requirements for Mechanical Engineering
In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various
 25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
The experimental Robot Project
 The experimental Robot Project Felix darthrake Schneider Norbert Braun {felix,norbert}@xrpbot.org 31c3 2014-12-27 1 2 3 BLDC motors Sensors Gears and Actuators Motor Testbed Other Projects : Goals The
The experimental Robot Project Felix darthrake Schneider Norbert Braun {felix,norbert}@xrpbot.org 31c3 2014-12-27 1 2 3 BLDC motors Sensors Gears and Actuators Motor Testbed Other Projects : Goals The
Flexible. Light. Productive. LEG Long-stroke Gripper
 LEG Flexible. Light. Productive. LEG Long-stroke Gripper Light long-stroke gripper for flexible and highly dynamic handling of various components Field of Application For use in a clean working environment,
LEG Flexible. Light. Productive. LEG Long-stroke Gripper Light long-stroke gripper for flexible and highly dynamic handling of various components Field of Application For use in a clean working environment,
1 Configuration Space Path Planning
 CS 4733, Class Notes 1 Configuration Space Path Planning Reference: 1) A Simple Motion Planning Algorithm for General Purpose Manipulators by T. Lozano-Perez, 2) Siegwart, section 6.2.1 Fast, simple to
CS 4733, Class Notes 1 Configuration Space Path Planning Reference: 1) A Simple Motion Planning Algorithm for General Purpose Manipulators by T. Lozano-Perez, 2) Siegwart, section 6.2.1 Fast, simple to
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
SuperQuest Salem Drive Train Best Practices
 SuperQuest Salem Drive Train Best Practices Drive Trains Design Hints Compare different designs Look at examples from Worlds Tips for Drive Systems Always support drive shafts on two points (gears, sprockets,
SuperQuest Salem Drive Train Best Practices Drive Trains Design Hints Compare different designs Look at examples from Worlds Tips for Drive Systems Always support drive shafts on two points (gears, sprockets,
Manipulators. Basic/Background Info Types of Manipulators General Manipulator design tips
 FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution
 Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution Sartaj Singh and Ramachandra K Abstract Boombot comprising four wheels and a rotating boom in the middle
Boombot: Low Friction Coefficient Stair Climbing Robot Using Rotating Boom and Weight Redistribution Sartaj Singh and Ramachandra K Abstract Boombot comprising four wheels and a rotating boom in the middle
ANALYZING THE DYNAMICS OF HIGH SPEED RAIL
 ANALYZING THE DYNAMICS OF HIGH SPEED RAIL 10 th Hydrail Conference 22 June 2015 George List, NC State Motivation Rail is a very attractive technology for moving people and goods Suspension system is extremely
ANALYZING THE DYNAMICS OF HIGH SPEED RAIL 10 th Hydrail Conference 22 June 2015 George List, NC State Motivation Rail is a very attractive technology for moving people and goods Suspension system is extremely
MECH S Homework Concept Synthesis Due 12 Feb 14
 MECH 3200 14S Homework Concept Synthesis Due 12 Feb 14 Veterinary Prosthetics Consider a canine front double amputee (i.e., hind legs intact, but fore legs gone humerus removed from the scapula). The owners
MECH 3200 14S Homework Concept Synthesis Due 12 Feb 14 Veterinary Prosthetics Consider a canine front double amputee (i.e., hind legs intact, but fore legs gone humerus removed from the scapula). The owners
MODELS FOR THE DYNAMIC ANALYSIS OF THE SUSPENSION SYSTEM OF THE VEHICLES REAR AXLE
 MODELS FOR THE DYNAMIC ANALYSIS OF THE SUSPENSION SYSTEM OF THE VEHICLES REAR AXLE Alexandru Cătălin Transilvania University of Braşov, Product Design and Robotics Department, calex@unitbv.ro Keywords:
MODELS FOR THE DYNAMIC ANALYSIS OF THE SUSPENSION SYSTEM OF THE VEHICLES REAR AXLE Alexandru Cătălin Transilvania University of Braşov, Product Design and Robotics Department, calex@unitbv.ro Keywords:
A Three Revolute Cobot Using CVTs in Parallel
 A hree Revolute Cobot Using CVs in Parallel Carl A. Moore Michael A. Peshkin J. Edward Colgate Department of Mechanical Engineering Northwestern University Evanston, IL 60208-3111 ABSRAC Cobots are capable
A hree Revolute Cobot Using CVs in Parallel Carl A. Moore Michael A. Peshkin J. Edward Colgate Department of Mechanical Engineering Northwestern University Evanston, IL 60208-3111 ABSRAC Cobots are capable
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
NEVER GET STUCK PIONEERING AWD SOLUTION
 NEVER GET STUCK PIONEERING AWD SOLUTION GO ANYWHERE WHATEVER THE WEATHER Customers have no other choice, but to opt for mechanical allwheel drive to improve the mobility of their trucks. This generates
NEVER GET STUCK PIONEERING AWD SOLUTION GO ANYWHERE WHATEVER THE WEATHER Customers have no other choice, but to opt for mechanical allwheel drive to improve the mobility of their trucks. This generates
Fundamentals of Steering Systems ME5670
 Fundamentals of Steering Systems ME5670 Class timing Monday: 14:30 Hrs 16:00 Hrs Thursday: 16:30 Hrs 17:30 Hrs Lecture 3 Thomas Gillespie, Fundamentals of Vehicle Dynamics, SAE, 1992. http://www.me.utexas.edu/~longoria/vsdc/clog.html
Fundamentals of Steering Systems ME5670 Class timing Monday: 14:30 Hrs 16:00 Hrs Thursday: 16:30 Hrs 17:30 Hrs Lecture 3 Thomas Gillespie, Fundamentals of Vehicle Dynamics, SAE, 1992. http://www.me.utexas.edu/~longoria/vsdc/clog.html
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
University Of California, Berkeley Department of Mechanical Engineering. ME 131 Vehicle Dynamics & Control (4 units)
") CATALOG DESCRIPTION University Of California, Berkeley Department of Mechanical Engineering ME 131 Vehicle Dynamics & Control (4 units) Undergraduate Elective Syllabus Physical understanding of automotive
CATALOG DESCRIPTION University Of California, Berkeley Department of Mechanical Engineering ME 131 Vehicle Dynamics & Control (4 units) Undergraduate Elective Syllabus Physical understanding of automotive
Unit HV04K Knowledge of Heavy Vehicle Chassis Units and Components
 Assessment Requirements Unit HV04K Knowledge of Heavy Vehicle Chassis Units and Components Content: Chassis layouts i. types of chassis ii. axle configurations iii. rear steered axles iv. self-steered
Assessment Requirements Unit HV04K Knowledge of Heavy Vehicle Chassis Units and Components Content: Chassis layouts i. types of chassis ii. axle configurations iii. rear steered axles iv. self-steered
Linear Shaft Motors in Parallel Applications
 Linear Shaft Motors in Parallel Applications Nippon Pulse s Linear Shaft Motor (LSM) has been successfully used in parallel motor applications. Parallel applications are ones in which there are two or
Linear Shaft Motors in Parallel Applications Nippon Pulse s Linear Shaft Motor (LSM) has been successfully used in parallel motor applications. Parallel applications are ones in which there are two or
STUDY OF ROLL CENTER SAURABH SINGH *, SAGAR SAHU ** ABSTRACT
 STUDY OF ROLL CENTER SAURABH SINGH *, SAGAR SAHU ** *, ** Mechanical engineering, NIT B ABSTRACT As our solar car aims to bring new green technology to cope up with the greatest challenge of modern era
STUDY OF ROLL CENTER SAURABH SINGH *, SAGAR SAHU ** *, ** Mechanical engineering, NIT B ABSTRACT As our solar car aims to bring new green technology to cope up with the greatest challenge of modern era
ABB Positioners -reliability -quality -performance
 Positioner range - 1-01-11-06 - ABB Positioners -reliability -quality -performance Positioner range - 2 Positioner range General features All All ABB ABB positioners are are of of robust robust construction
Positioner range - 1-01-11-06 - ABB Positioners -reliability -quality -performance Positioner range - 2 Positioner range General features All All ABB ABB positioners are are of of robust robust construction
Design of a Mobile Robotic Platform with Variable Footprint
 Design of a Mobile Robotic Platform with Variable Footprint by Alexander N. Wilhelm A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree of Master of
Design of a Mobile Robotic Platform with Variable Footprint by Alexander N. Wilhelm A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree of Master of
RED RAVEN, THE LINKED-BOGIE PROTOTYPE. Ara Mekhtarian, Joseph Horvath, C.T. Lin. Department of Mechanical Engineering,
 RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
RED RAVEN, THE LINKED-BOGIE PROTOTYPE Ara Mekhtarian, Joseph Horvath, C.T. Lin Department of Mechanical Engineering, California State University, Northridge California, USA Abstract RedRAVEN is a pioneered
Automobile Body, Chassis, Occupant and Pedestrian Safety, and Structures Track
 Automobile Body, Chassis, Occupant and Pedestrian Safety, and Structures Track These sessions are related to Body Engineering, Fire Safety, Human Factors, Noise and Vibration, Occupant Protection, Steering
Automobile Body, Chassis, Occupant and Pedestrian Safety, and Structures Track These sessions are related to Body Engineering, Fire Safety, Human Factors, Noise and Vibration, Occupant Protection, Steering
Simulating the dynamical behavior of an AGV
 Simulating the dynamical behavior of an AGV Citation for published version (APA): Legius, M. J. E., Nijmeijer, H., & Rodriguez Angeles, A. (2014). Simulating the dynamical behavior of an AGV. (D&C; Vol.
Simulating the dynamical behavior of an AGV Citation for published version (APA): Legius, M. J. E., Nijmeijer, H., & Rodriguez Angeles, A. (2014). Simulating the dynamical behavior of an AGV. (D&C; Vol.
How to Build with the Mindstorm Kit
 How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
Design of an omnidirectional universal mobile platform
 Design of an omnidirectional universal mobile platform R.P.A. van Haendel DCT 2005.117 DCT traineeship report Supervisors: prof. M. Ang. Jr, National University of Singapore Prof. Dr. Ir. M. Steinbuch,
Design of an omnidirectional universal mobile platform R.P.A. van Haendel DCT 2005.117 DCT traineeship report Supervisors: prof. M. Ang. Jr, National University of Singapore Prof. Dr. Ir. M. Steinbuch,
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July ISSN BY B.MADHAN KUMAR
 International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 485 FLYING HOVER BIKE, A SMALL AERIAL VEHICLE FOR COMMERCIAL OR. SURVEYING PURPOSES BY B.MADHAN KUMAR Department
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 485 FLYING HOVER BIKE, A SMALL AERIAL VEHICLE FOR COMMERCIAL OR. SURVEYING PURPOSES BY B.MADHAN KUMAR Department
ISO 8855 INTERNATIONAL STANDARD. Road vehicles Vehicle dynamics and road-holding ability Vocabulary
 INTERNATIONAL STANDARD ISO 8855 Second edition 2011-12-15 Road vehicles Vehicle dynamics and road-holding ability Vocabulary Véhicules routiers Dynamique des véhicules et tenue de route Vocabulaire Reference
INTERNATIONAL STANDARD ISO 8855 Second edition 2011-12-15 Road vehicles Vehicle dynamics and road-holding ability Vocabulary Véhicules routiers Dynamique des véhicules et tenue de route Vocabulaire Reference
KINEMATICS OF REAR SUSPENSION SYSTEM FOR A BAJA ALL-TERRAIN VEHICLE.
 International Journal of Mechanical Engineering and Technology (IJMET) Volume 8, Issue 8, August 2017, pp. 164 171, Article ID: IJMET_08_08_019 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=8&itype=8
International Journal of Mechanical Engineering and Technology (IJMET) Volume 8, Issue 8, August 2017, pp. 164 171, Article ID: IJMET_08_08_019 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=8&itype=8
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics.
 Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 4: Actuators Part 1 Chapter 3, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation and Control, The
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 4: Actuators Part 1 Chapter 3, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation and Control, The
Components for parallel kinematics
 Components for parallel kinematics Series GLK, GLK 2, GLK 3 and GLAE Parallel kinematic components consist of a number of parallel, longitudinally adjustable mechanical struts that are arranged between
Components for parallel kinematics Series GLK, GLK 2, GLK 3 and GLAE Parallel kinematic components consist of a number of parallel, longitudinally adjustable mechanical struts that are arranged between
Design of Suspension and Steering system for an All-Terrain Vehicle and their Interdependence
 Design of Suspension and Steering system for an All-Terrain Vehicle and their Interdependence Saurabh Wanganekar 1, Chinmay Sapkale 2, Priyanka Chothe 3, Reshma Rohakale 4,Samadhan Bhosale 5 1 Student,Department
Design of Suspension and Steering system for an All-Terrain Vehicle and their Interdependence Saurabh Wanganekar 1, Chinmay Sapkale 2, Priyanka Chothe 3, Reshma Rohakale 4,Samadhan Bhosale 5 1 Student,Department
Improvement of Mobility for In-Wheel Small Electric Vehicle with Integrated Four Wheel Drive and Independent Steering: A Numerical Simulation Analysis
 International Journal of Multidisciplinary and Current Research ISSN: 2321-3124 Research Article Available at: http://ijmcr.com Improvement of Mobility for In-Wheel Small Electric Vehicle with Integrated
International Journal of Multidisciplinary and Current Research ISSN: 2321-3124 Research Article Available at: http://ijmcr.com Improvement of Mobility for In-Wheel Small Electric Vehicle with Integrated
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Alan Kilian Spring Design and construct a Holonomic motion platform and control system.
 Alan Kilian Spring 2007 Design and construct a Holonomic motion platform and control system. Introduction: This project is intended as a demonstration of my skills in four specific areas: Power system
Alan Kilian Spring 2007 Design and construct a Holonomic motion platform and control system. Introduction: This project is intended as a demonstration of my skills in four specific areas: Power system
Active Electrical Load Design for a Cluster POWER Rehabilitation System
 Active Electrical Load Design for a Cluster POWER Rehabilitation System Chung-Hsien Kuo Department of Electrical Engineering National Taiwan University of Science and Technology Email: chkuo@mail.ntust.edu.tw
Active Electrical Load Design for a Cluster POWER Rehabilitation System Chung-Hsien Kuo Department of Electrical Engineering National Taiwan University of Science and Technology Email: chkuo@mail.ntust.edu.tw
Kazuaki Sakai, Toshihiko Yasuda, and Katsuyuki Tanaka, Member, IEEE
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Power Assist Effects of a New Type Assist Unit in a One Hand Drive Wheelchair with a Triple
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Power Assist Effects of a New Type Assist Unit in a One Hand Drive Wheelchair with a Triple
Modelling and Simulation Specialists
 Modelling and Simulation Specialists Multi-Domain Simulation of Hybrid Vehicles Multiphysics Simulation for Autosport / Motorsport Applications Seminar UK Magnetics Society Claytex Services Limited Software,
Modelling and Simulation Specialists Multi-Domain Simulation of Hybrid Vehicles Multiphysics Simulation for Autosport / Motorsport Applications Seminar UK Magnetics Society Claytex Services Limited Software,
Swerve Drive Selection Process. Cyber Blue 234 OCTOBER 2010 / Indiana Forums
 Swerve Drive Selection Process Cyber Blue 234 OCTOBER 2010 / Indiana Forums Background Cyber Blue had discussed wanting to try an omni-directional drive system for many years Recognized need for a lot
Swerve Drive Selection Process Cyber Blue 234 OCTOBER 2010 / Indiana Forums Background Cyber Blue had discussed wanting to try an omni-directional drive system for many years Recognized need for a lot
MECHATRONICS STRUCTURE OF THE CENTAUR LIKE WHEELED SERVICE ROBOT. Sami Ylönen, Aarne Halme
 MECHATRONICS STRUCTURE OF THE CENTAUR LIKE WHEELED SERVICE ROBOT Sami Ylönen, Aarne Halme Helsinki University of Technology, Automation Technology laboratory P.O.Box 5400, 02015 HUT, Finland, Tel. +358-9-451
MECHATRONICS STRUCTURE OF THE CENTAUR LIKE WHEELED SERVICE ROBOT Sami Ylönen, Aarne Halme Helsinki University of Technology, Automation Technology laboratory P.O.Box 5400, 02015 HUT, Finland, Tel. +358-9-451
Design and Simulation of Cassino Hexapod Robot
 Design and Simulation of Cassino Hexapod Robot CARBONE G., YATSUN A., CECCARELLI M., YATSUN S. LARM: Laboratory of Robotics and Mechatronics DiMSAT - University of Cassino Via Di Biasio 4, 004 Cassino
Design and Simulation of Cassino Hexapod Robot CARBONE G., YATSUN A., CECCARELLI M., YATSUN S. LARM: Laboratory of Robotics and Mechatronics DiMSAT - University of Cassino Via Di Biasio 4, 004 Cassino
SUMMARY OF STANDARD K&C TESTS AND REPORTED RESULTS
 Description of K&C Tests SUMMARY OF STANDARD K&C TESTS AND REPORTED RESULTS The Morse Measurements K&C test facility is the first of its kind to be independently operated and made publicly available in
Description of K&C Tests SUMMARY OF STANDARD K&C TESTS AND REPORTED RESULTS The Morse Measurements K&C test facility is the first of its kind to be independently operated and made publicly available in
Illustration 1: Dymola user view with chassis model diagram and Modelica text. NHTSA fishhook maneuver result plot and visualization. Chassis Design a
 Modeling and Simulation of Road Vehicle Dynamics The VehicleDynamics Library (VDL) is a tool for modeling, simulation and analysis of the dynamics of vehicle motion. Handling behavior is the primary target,
Modeling and Simulation of Road Vehicle Dynamics The VehicleDynamics Library (VDL) is a tool for modeling, simulation and analysis of the dynamics of vehicle motion. Handling behavior is the primary target,
PRELIMINARY DESIGN REVIEW
 PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
Jacking and Equalizing Cylinders for NASA- Crawler Transporter
 Group 12 - Special Applications Paper 12-1 307 Jacking and Equalizing Cylinders for NASA- Crawler Transporter Dr.- Ing. Ingo Rühlicke, MBA Walter Hunger GmbH & Co. KG, Rodenbacher Str. 50, 97816 Lohr am
Group 12 - Special Applications Paper 12-1 307 Jacking and Equalizing Cylinders for NASA- Crawler Transporter Dr.- Ing. Ingo Rühlicke, MBA Walter Hunger GmbH & Co. KG, Rodenbacher Str. 50, 97816 Lohr am
EECS 461 Final Project: Adaptive Cruise Control
 EECS 461 Final Project: Adaptive Cruise Control 1 Overview Many automobiles manufactured today include a cruise control feature that commands the car to travel at a desired speed set by the driver. In
EECS 461 Final Project: Adaptive Cruise Control 1 Overview Many automobiles manufactured today include a cruise control feature that commands the car to travel at a desired speed set by the driver. In
Analysis and control of vehicle steering wheel angular vibrations
 Analysis and control of vehicle steering wheel angular vibrations T. LANDREAU - V. GILLET Auto Chassis International Chassis Engineering Department Summary : The steering wheel vibration is analyzed through
Analysis and control of vehicle steering wheel angular vibrations T. LANDREAU - V. GILLET Auto Chassis International Chassis Engineering Department Summary : The steering wheel vibration is analyzed through
Relevant friction effects on walking machines
 Relevant friction effects on walking machines Elena Garcia and Pablo Gonzalez-de-Santos Industrial Automation Institute (CSIC) 28500 Madrid, Spain email: egarcia@iai.csic.es Key words: Legged robots, friction
Relevant friction effects on walking machines Elena Garcia and Pablo Gonzalez-de-Santos Industrial Automation Institute (CSIC) 28500 Madrid, Spain email: egarcia@iai.csic.es Key words: Legged robots, friction
EMEA. Rebecca Margetts Senior Engineer: Mathematical Modelling AgustaWestland. Development of a Helicopter Drivetrain Dynamics Model in MSC ADAMS
 EMEA Rebecca Margetts Senior Engineer: Mathematical Modelling AgustaWestland Development of a Helicopter Drivetrain Dynamics Model in MSC ADAMS Introduction The AW101 Helicopter The Task Theory Existing
EMEA Rebecca Margetts Senior Engineer: Mathematical Modelling AgustaWestland Development of a Helicopter Drivetrain Dynamics Model in MSC ADAMS Introduction The AW101 Helicopter The Task Theory Existing
Design Methodology of Steering System for All-Terrain Vehicles
 Design Methodology of Steering System for All-Terrain Vehicles Dr. V.K. Saini*, Prof. Sunil Kumar Amit Kumar Shakya #1, Harshit Mishra #2 *Head of Dep t of Mechanical Engineering, IMS Engineering College,
Design Methodology of Steering System for All-Terrain Vehicles Dr. V.K. Saini*, Prof. Sunil Kumar Amit Kumar Shakya #1, Harshit Mishra #2 *Head of Dep t of Mechanical Engineering, IMS Engineering College,
FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT
 FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT Antti MAKELA, Jouni MATTILA, Mikko SIUKO, Matti VILENIUS Institute of Hydraulics and Automation, Tampere University of Technology P.O.Box
FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT Antti MAKELA, Jouni MATTILA, Mikko SIUKO, Matti VILENIUS Institute of Hydraulics and Automation, Tampere University of Technology P.O.Box
DEVELOPMENT ENVIRONMENT FOR HAPTIC FEEDBACK DEVICE ON MOBILE AGRICULTURAL EQUIPMENT
 Sustainable Construction and Design 211 DEVELOPMENT ENVIRONMENT FOR HAPTIC FEEDBACK DEVICE ON MOBILE AGRICULTURAL EQUIPMENT L. Jánosi, J. Kis Institute for Mechanical Engineering Technology, Faculty of
Sustainable Construction and Design 211 DEVELOPMENT ENVIRONMENT FOR HAPTIC FEEDBACK DEVICE ON MOBILE AGRICULTURAL EQUIPMENT L. Jánosi, J. Kis Institute for Mechanical Engineering Technology, Faculty of
STEERING SYSTEM Introduction
 STEERING SYSTEM Introduction The steering makes it possible to change direction. The steering must be reliable and safe; there must not be too much play in the steering. It must be possible to steer accurately.
STEERING SYSTEM Introduction The steering makes it possible to change direction. The steering must be reliable and safe; there must not be too much play in the steering. It must be possible to steer accurately.
CONTROLS SYSTEM OF VEHICLE MODEL WITH FOUR WHEEL STEERING (4WS)
") XIII XIII Međunarodni naučni simpozijum Motorna Vozila i Motori International Scientific Meeting Motor Vehicles & Engines Kragujevac, 04. - 06.10.004 YU04017 P. Brabec *, M. Malý **, R. Voženílek *** CONTROLS
XIII XIII Međunarodni naučni simpozijum Motorna Vozila i Motori International Scientific Meeting Motor Vehicles & Engines Kragujevac, 04. - 06.10.004 YU04017 P. Brabec *, M. Malý **, R. Voženílek *** CONTROLS
Design of Wheeled Mobile Robot with Tri-Star Wheel as Rescue Robot
 Design of Wheeled Mobile Robot with Tri-Star Wheel as Rescue Robot Rafiuddin Syam, Wahyu H. Piarah Mechanical Engineering Department Engineering Faculty, Hasanuddin University Jl. P. Kemerdekaan Km 10
Design of Wheeled Mobile Robot with Tri-Star Wheel as Rescue Robot Rafiuddin Syam, Wahyu H. Piarah Mechanical Engineering Department Engineering Faculty, Hasanuddin University Jl. P. Kemerdekaan Km 10
The OmniMate Mobile Robot Design, Implementation, and Experimental Results
 Proceedings of the IEEE International Conference on Robotics and Automation, Albuquerque, NM, Apr. 21-27, 1997, pp. 3505-3510. 1) 2) The OmniMate Mobile Robot Design, Implementation, and Experimental Results
Proceedings of the IEEE International Conference on Robotics and Automation, Albuquerque, NM, Apr. 21-27, 1997, pp. 3505-3510. 1) 2) The OmniMate Mobile Robot Design, Implementation, and Experimental Results
LEG. Application example. Electrical 2-Finger Parallel Gripper Long-stroke Gripper. Gripping force 1050 N 1500 N. Weight 9 kg 11.
 LEG www.comoso.com Size 760 Weight 9 kg 11.6 kg Gripping force 1050 N 1500 N Stroke per finger 281 mm Workpiece weight 15.75 kg 22.5 kg Application example Gripping unit for top loading and palettizing
LEG www.comoso.com Size 760 Weight 9 kg 11.6 kg Gripping force 1050 N 1500 N Stroke per finger 281 mm Workpiece weight 15.75 kg 22.5 kg Application example Gripping unit for top loading and palettizing
This document is a preview generated by EVS
 INTERNATIONAL STANDARD ISO 8855 Second edition 2011-12-15 Road vehicles Vehicle dynamics and road-holding ability Vocabulary Véhicules routiers Dynamique des véhicules et tenue de route Vocabulaire Reference
INTERNATIONAL STANDARD ISO 8855 Second edition 2011-12-15 Road vehicles Vehicle dynamics and road-holding ability Vocabulary Véhicules routiers Dynamique des véhicules et tenue de route Vocabulaire Reference
Unit 1 Introduction to VEX and Robotics
 Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
EMC-HD. C 01_2 Subheadline_15pt/7.2mm
 C Electromechanical 01_1 Headline_36pt/14.4mm Cylinder EMC-HD C 01_2 Subheadline_15pt/7.2mm 2 Elektromechanischer Zylinder EMC-HD Short product name Example: EMC 085 HD 1 System = ElectroMechanical Cylinder
C Electromechanical 01_1 Headline_36pt/14.4mm Cylinder EMC-HD C 01_2 Subheadline_15pt/7.2mm 2 Elektromechanischer Zylinder EMC-HD Short product name Example: EMC 085 HD 1 System = ElectroMechanical Cylinder
The linear motor technology for industrial applications
 Industrial Linear Motors Purely electrical drive system Freely positionable along the entire stroke For precise and dynamic positioning tasks Direct drive technology provides longer life Clean room certification
Industrial Linear Motors Purely electrical drive system Freely positionable along the entire stroke For precise and dynamic positioning tasks Direct drive technology provides longer life Clean room certification
Introduction. Kinematics and Dynamics of Machines. Involute profile. 7. Gears
 Introduction The kinematic function of gears is to transfer rotational motion from one shaft to another Kinematics and Dynamics of Machines 7. Gears Since these shafts may be parallel, perpendicular, or
Introduction The kinematic function of gears is to transfer rotational motion from one shaft to another Kinematics and Dynamics of Machines 7. Gears Since these shafts may be parallel, perpendicular, or
Periodic Gait Plans for Locomotion on Natural Terrain by a Submersible Walking Dredger/ Miner
 Periodic Gait Plans for Locomotion on Natural Terrain by a Submersible Walking Dredger/ Miner Dr. Ir. Sritama Sarkar 1, Dr. Neil Bose 2, Mr. Mridul K Sarkar 3 1 Project Engineer, Soil Machine Dynamics
Periodic Gait Plans for Locomotion on Natural Terrain by a Submersible Walking Dredger/ Miner Dr. Ir. Sritama Sarkar 1, Dr. Neil Bose 2, Mr. Mridul K Sarkar 3 1 Project Engineer, Soil Machine Dynamics
Aerial robots that interact with the environment
 Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
Segway Robotic Mobility Platform (RMP) Specifications
 Specifications") Segway Robotic Mobility Platform (RMP) Specifications Proven Durability, Reliability, and Performance The Segway RMP takes the performance and engineering prowess demonstrated in the Segway Personal Transporter
Segway Robotic Mobility Platform (RMP) Specifications Proven Durability, Reliability, and Performance The Segway RMP takes the performance and engineering prowess demonstrated in the Segway Personal Transporter