COMP 776: Computer Vision
|
|
|
- Clyde Carr
- 5 years ago
- Views:
Transcription









1 COMP 776: Computer Vision
 Office hours: By appointment, SN 219 Textbook: Forsyth & Ponce, Computer Vision: A Modern Approach")
2 Basic Info Instructor: Svetlana Lazebnik Office hours: By appointment, SN 219 Textbook: Forsyth & Ponce, Computer Vision: A Modern Approach Class webpage:
3 Today Introduction to computer vision Course overview Course requirements


























4 Why study computer vision? Images and video are everywhere! Personal photo albums Movies, news, sports Surveillance and security Medical and scientific images
5 Vision is useful Vision is interesting Vision is difficult Why study computer vision? Half of primate cerebral cortex is devoted to visual processing Achieving human-level visual perception is probably AI-complete

6 Origins of computer vision L. G. Roberts, Machine Perception of Three Dimensional Solids, Ph.D. thesis, MIT Department of Electrical Engineering, 1963.
7 Connections to other disciplines Artificial Intelligence Robotics Machine Learning Computer Vision Computer Graphics Psychology Neuroscience Image Processing


")



8 Applications of computer vision Factory inspection Reading license plates, checks, ZIP codes Monitoring for safety (Poseidon) Surveillance Sources: K. Grauman, L. Fei-Fei Autonomous driving, robot navigation Driver assistance (collision warning, lane departure warning, rear object detection)


")


 Visual")
")
9 Applications of computer vision Assistive technologies Entertainment (Sony EyeToy) Movie special effects Digital cameras (face detection for setting focus, exposure) Visual search (MSR Lincoln) Sources: K. Grauman, L. Fei-Fei
10 Applications of computer vision For more information on the computer vision industry:
11 The goal of computer vision To perceive the world behind the picture
12 The goal of computer vision To perceive the world behind the picture
13 The goal of computer vision To perceive the world behind the picture What exactly does this mean? Vision as a source of metric 3D information Vision as a source of semantic information




14 Real-time stereo Vision as measurement device Structure from motion Multi-view stereo for community photo collections NASA Mars Rover Pollefeys et al. Goesele et al. Amazing success story!
15 but why do Learning for Vision? What if I don t care about this wishy-washy recognition stuff? I just want to make my robot go! Small Reason: For measurement, other sensors are often better (in DARPA Grand Challenge, vision was barely used!) For navigation, you still need to learn! Big Reason: The goals of computer vision (what + where) are in terms of what humans care about. Slide credit: A. Efros
16 Vision as a source of semantic information slide credit: Fei-Fei, Fergus & Torralba
17 Object categorization sky building flag banner bus face street lamp bus wall cars slide credit: Fei-Fei, Fergus & Torralba
18 Scene and context categorization outdoor city traffic slide credit: Fei-Fei, Fergus & Torralba

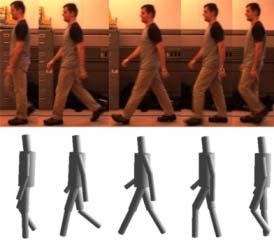
19 Qualitative spatial information slanted non-rigid moving object vertical rigid moving object horizontal rigid moving object slide credit: Fei-Fei, Fergus & Torralba



20 Challenges: viewpoint variation Michelangelo slide credit: Fei-Fei, Fergus & Torralba

21 Challenges: illumination image credit: J. Koenderink




22 Challenges: scale slide credit: Fei-Fei, Fergus & Torralba

23 Challenges: deformation Xu, Beihong 1943 slide credit: Fei-Fei, Fergus & Torralba

24 Challenges: occlusion Magritte, 1957 slide credit: Fei-Fei, Fergus & Torralba

25 Challenges: background clutter






26 Challenges: object intra-class variation slide credit: Fei-Fei, Fergus & Torralba


27 Challenges: local ambiguity slide credit: Fei-Fei, Fergus & Torralba

28 Challenges or opportunities? Images are confusing, but they also reveal the structure of the world through numerous cues Our job is to interpret the cues! Image source: J. Koenderink

29 Depth cues: Linear perspective

30 Depth cues: Aerial perspective

31 Depth ordering cues: Occlusion Source: J. Koenderink

32 Shape cues: Texture gradient


33 Shape and lighting cues: Shading Source: J. Koenderink

34 Position and lighting cues: Cast shadows Source: J. Koenderink

35 Grouping cues: Similarity (color, texture, proximity)

36 Grouping cues: Common fate Image credit: Arthus-Bertrand (via F. Durand)
37 Bottom line Perception is an inherently ambiguous problem Many different 3D scenes could have given rise to a particular 2D picture Image source: F. Durand
 Use prior knowledge about the structure of the world Need both exact measurements and statistical inference! Image source: F.")
38 Bottom line Perception is an inherently ambiguous problem Many different 3D scenes could have given rise to a particular 2D picture Possible solutions Bring in more constraints (more images) Use prior knowledge about the structure of the world Need both exact measurements and statistical inference! Image source: F. Durand
39 Course overview I. Early vision: Image formation and processing II. Mid-level vision: Grouping and fitting III. Multi-view geometry IV. Recognition V. Advanced topics



40 I. Early vision Basic image formation and processing * = Cameras and sensors Light and color Linear filtering Edge detection Feature extraction: corner and blob detection


41 Fitting and grouping II. Mid-level vision Alignment Fitting: Least squares Hough transform RANSAC



")


42 III. Multi-view geometry Stereo Epipolar geometry Tomasi & Kanade (1993) Affine structure from motion Projective structure from motion: Here be dragons!



43 IV. Recognition Patch description and matching Clustering and visual vocabularies Bag-of-features models Classification Sources: D. Lowe, L. Fei-Fei





44 V. Advanced Topics Time permitting Segmentation Face detection Articulated models Motion and tracking
45 Course requirements Philosophy: computer vision is best experienced hands-on Programming assignments: 40% Three or four assignments Expect the first one in a couple of weeks Brush up on your MATLAB skills (see web page for tutorial) Final project: 50% Putting several pieces together List of options will be posted in the next few weeks (some great ideas already from Gary Bishop) Expect to commit to a project idea by the end of February Participation: 10% Ask questions Answer questions Give me feedback: I m learning too!
46 Collaboration policy Feel free to discuss assignments with each other, but coding must be done individually Feel free to incorporate code or tips you find on the Web, provided this doesn t make the assignment trivial and you explicitly acknowledge your sources Remember: I can Google too!
 Reading: cameras and image formation (F&P")
47 Next week Homework: MATLAB tutorial (self-study, not collected) Reading: cameras and image formation (F&P chapter 1)
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
University of Michigan s Work Toward Autonomous Cars
 University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
University of Michigan s Work Toward Autonomous Cars RYAN EUSTICE NAVAL ARCHITECTURE & MARINE ENGINEERING MECHANICAL ENGINEERING, AND COMPUTER SCIENCE AND ENGINEERING Roadmap Why automated driving? Next
Vehicles at Volkswagen
 Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
Autonomous Driving and Intelligent Vehicles at Volkswagen Dirk Langer, Ph.D. VW Autonomous Driving Story 2000 2003 2006 Robot Klaus Purpose: Replace test drivers on poor test tracks (job safety) Robot
AI Driven Environment Modeling for Autonomous Driving on NVIDIA DRIVE PX2
 AI Driven Environment Modeling for Autonomous Driving on NVIDIA DRIVE PX2 Dr. Alexey Abramov, Christopher Bayer, Dr. Claudio Heller, Claudia Loy Chassis & Safety Agenda 1 2 3 4 5 6 7 Introduction Autonomous
AI Driven Environment Modeling for Autonomous Driving on NVIDIA DRIVE PX2 Dr. Alexey Abramov, Christopher Bayer, Dr. Claudio Heller, Claudia Loy Chassis & Safety Agenda 1 2 3 4 5 6 7 Introduction Autonomous
Deep Learning Will Make Truly Self-Driving Cars a Reality
 Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Deep Learning Will Make Truly Self-Driving Cars a Reality Tomorrow s truly driverless cars will be the safest vehicles on the road. While many vehicles today use driver assist systems to automate some
Your web browser (Safari 7) is out of date. For more security, comfort and. the best experience on this site: Update your browser Ignore
 is out of date. For more security, comfort and. the best experience on this site: Update your browser Ignore") Your web browser (Safari 7) is out of date. For more security, comfort and Activitydevelop the best experience on this site: Update your browser Ignore Circuits with Friends What is a circuit, and what
Your web browser (Safari 7) is out of date. For more security, comfort and Activitydevelop the best experience on this site: Update your browser Ignore Circuits with Friends What is a circuit, and what
Cumulative Percent Frequency Percent Valid Percent
 Frequency Table Fully Online Hybrid Online Partially Online H_10 Course Type Frequency 868 24.7 24.7 24.7 1735 49.3 49.3 74.0 832 23.6 23.6 97.6 84 2.4 2.4 100.0 H_13 Period Frequency 1162R 100.0 H_14
Frequency Table Fully Online Hybrid Online Partially Online H_10 Course Type Frequency 868 24.7 24.7 24.7 1735 49.3 49.3 74.0 832 23.6 23.6 97.6 84 2.4 2.4 100.0 H_13 Period Frequency 1162R 100.0 H_14
Syllabus: Automated, Connected, and Intelligent Vehicles
 Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Introduction Projects Basic Design Perception Motion Planning Mission Planning Behaviour Conclusion. Autonomous Vehicles
 Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Dipak Chaudhari Sriram Kashyap M S 2008 Outline 1 Introduction 2 Projects 3 Basic Design 4 Perception 5 Motion Planning 6 Mission Planning 7 Behaviour 8 Conclusion Introduction Unmanned Vehicles: No driver
Le développement technique des véhicules autonomes
 Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Shaping the future Le développement technique des véhicules autonomes Renaud Dubé, Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Fribourg, 23 Juin 2016 Renaud Dubé 23.06.2016 1 Content
Driver assistance systems and outlook into automated driving
 Driver assistance systems and outlook into automated driving EAEC-ESFA2015 Bucharest November 2015 1 General presentation of the Bosch Group Some 45,600 1 researchers and developers work at Bosch: at 94
Driver assistance systems and outlook into automated driving EAEC-ESFA2015 Bucharest November 2015 1 General presentation of the Bosch Group Some 45,600 1 researchers and developers work at Bosch: at 94
From Developing Credit Risk Models Using SAS Enterprise Miner and SAS/STAT. Full book available for purchase here.
 From Developing Credit Risk Models Using SAS Enterprise Miner and SAS/STAT. Full book available for purchase here. About this Book... ix About the Author... xiii Acknowledgments...xv Chapter 1 Introduction...
From Developing Credit Risk Models Using SAS Enterprise Miner and SAS/STAT. Full book available for purchase here. About this Book... ix About the Author... xiii Acknowledgments...xv Chapter 1 Introduction...
ECE 5332 Communications and Control in Smart Grid
 ECE 5332 Communications and Control in Smart Grid Department of Electrical & Computer Engineering Texas Tech University Spring 2012 A.H. Mohsenian Rad (U of T) Networking and Distributed Systems 1 Course
ECE 5332 Communications and Control in Smart Grid Department of Electrical & Computer Engineering Texas Tech University Spring 2012 A.H. Mohsenian Rad (U of T) Networking and Distributed Systems 1 Course
University Of California, Berkeley Department of Mechanical Engineering. ME 131 Vehicle Dynamics & Control (4 units)
") CATALOG DESCRIPTION University Of California, Berkeley Department of Mechanical Engineering ME 131 Vehicle Dynamics & Control (4 units) Undergraduate Elective Syllabus Physical understanding of automotive
CATALOG DESCRIPTION University Of California, Berkeley Department of Mechanical Engineering ME 131 Vehicle Dynamics & Control (4 units) Undergraduate Elective Syllabus Physical understanding of automotive
Leveraging AI for Self-Driving Cars at GM. Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel
 Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Leveraging AI for Self-Driving Cars at GM Efrat Rosenman, Ph.D. Head of Cognitive Driving Group General Motors Advanced Technical Center, Israel Agenda The vision From ADAS (Advance Driving Assistance
Final Administrative Decision
 Final Administrative Decision Date: August 30, 2018 By: David Martin, Director of Planning and Community Development Subject: Shared Mobility Device Pilot Program Operator Selection and Device Allocation
Final Administrative Decision Date: August 30, 2018 By: David Martin, Director of Planning and Community Development Subject: Shared Mobility Device Pilot Program Operator Selection and Device Allocation
Smart Spinner. Age 7+ Teacher s Notes. In collaboration with NASA
 Smart Spinner Age 7+ Teacher s Notes In collaboration with NASA LEGO and the LEGO logo are trademarks of the/sont des marques de commerce de/son marcas registradas de LEGO Group. 2012 The LEGO Group. 190912
Smart Spinner Age 7+ Teacher s Notes In collaboration with NASA LEGO and the LEGO logo are trademarks of the/sont des marques de commerce de/son marcas registradas de LEGO Group. 2012 The LEGO Group. 190912
DRIVE RIGHT ANSWERS PDF
 DRIVE RIGHT ANSWERS PDF ==> Download: DRIVE RIGHT ANSWERS PDF DRIVE RIGHT ANSWERS PDF - Are you searching for Drive Right Answers Books? Now, you will be happy that at this time Drive Right Answers PDF
DRIVE RIGHT ANSWERS PDF ==> Download: DRIVE RIGHT ANSWERS PDF DRIVE RIGHT ANSWERS PDF - Are you searching for Drive Right Answers Books? Now, you will be happy that at this time Drive Right Answers PDF
Új technológiák a közlekedésbiztonság jövőjéért
 Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
9.00 Introduction to Psychology Week 5, Lecture 1 Perception 1: 3D Structure from 2DProjections
 Perception I: 3D Structure from 2D Projections The Importance of Illusions Naïve realism: refuted by illusions Illusions raise doubt about knowledge Philosophical skepticism Relativism and social constructionism:
Perception I: 3D Structure from 2D Projections The Importance of Illusions Naïve realism: refuted by illusions Illusions raise doubt about knowledge Philosophical skepticism Relativism and social constructionism:
Institutional Research and Planning 440 Day Hall Ithaca, New York PULSE Survey
 Institutional Research and Planning 440 Day Hall Ithaca, New York 14853 2009 PULSE Survey The Cornell PULSE (Perceptions of Undergraduate Life and Student Experiences) Survey asks currently enrolled undergraduate
Institutional Research and Planning 440 Day Hall Ithaca, New York 14853 2009 PULSE Survey The Cornell PULSE (Perceptions of Undergraduate Life and Student Experiences) Survey asks currently enrolled undergraduate
Statistical Learning Examples
 Statistical Learning Examples Genevera I. Allen Statistics 640: Statistical Learning August 26, 2013 (Stat 640) Lecture 1 August 26, 2013 1 / 19 Example: Microarrays arrays High-dimensional: Goals: Measures
Statistical Learning Examples Genevera I. Allen Statistics 640: Statistical Learning August 26, 2013 (Stat 640) Lecture 1 August 26, 2013 1 / 19 Example: Microarrays arrays High-dimensional: Goals: Measures
Openness Design modularity Outstanding Quality Fine positioning INGENIA MOTION CONTROL Motor control Engineered Solutions Complete Integration
 Openness Design modularity Outstanding Quality Fine positioning INGENIA MOTION CONTROL Motor control Engineered Solutions Complete Integration Freedom to create Complete motion control Your partner in
Openness Design modularity Outstanding Quality Fine positioning INGENIA MOTION CONTROL Motor control Engineered Solutions Complete Integration Freedom to create Complete motion control Your partner in
EcoCar3-ADAS. Project Plan. Summary. Why is This Project Important?
 EcoCar3-ADAS Project Plan Summary Scott Smith This project is the Advanced Driver Assistance System (ADAS) of the 2015-2016 Senior Design for the EcoCar3. This will be an embedded system for the EcoCar3
EcoCar3-ADAS Project Plan Summary Scott Smith This project is the Advanced Driver Assistance System (ADAS) of the 2015-2016 Senior Design for the EcoCar3. This will be an embedded system for the EcoCar3
Smart Cars: An Ideal Applications Platform for Robotics and Vision Technologies
 Smart Cars: An Ideal Applications Platform for Robotics and Vision Technologies Alexander Zelinsky CSIRO ICT Centre, Canberra, Australia alex.zelinsky@csiro.au Motivation: Motor Car Accidents Car accidents
Smart Cars: An Ideal Applications Platform for Robotics and Vision Technologies Alexander Zelinsky CSIRO ICT Centre, Canberra, Australia alex.zelinsky@csiro.au Motivation: Motor Car Accidents Car accidents
LiDAR Teach-In OSRAM Licht AG June 20, 2018 Munich Light is OSRAM
 www.osram.com LiDAR Teach-In June 20, 2018 Munich Light is OSRAM Agenda Introduction Autonomous driving LIDAR technology deep-dive LiDAR@OS: Emitter technologies Outlook LiDAR Tech Teach-In June 20, 2018
www.osram.com LiDAR Teach-In June 20, 2018 Munich Light is OSRAM Agenda Introduction Autonomous driving LIDAR technology deep-dive LiDAR@OS: Emitter technologies Outlook LiDAR Tech Teach-In June 20, 2018
Embedding Technology in Transportation Courses Symposium on Active Student Engagement in Civil and Transportation Engineering
 Embedding Technology in Transportation Courses Symposium on Active Student Engagement in Civil and Transportation Engineering Louisiana Tech University, Ruston, LA July 24-26, 2016 Overview Introduction
Embedding Technology in Transportation Courses Symposium on Active Student Engagement in Civil and Transportation Engineering Louisiana Tech University, Ruston, LA July 24-26, 2016 Overview Introduction
BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES. December 2016
 BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES December 2016 DISCLAIMER. This document contains forward-looking statements that reflect BMW Group s current views about
BMW GROUP TECHNOLOGY WORKSHOPS AUTOMATED DRIVING-DIGITALIZATION MOBILITY SERVICES December 2016 DISCLAIMER. This document contains forward-looking statements that reflect BMW Group s current views about
Linear Modeling Exercises. In case you d like to see why the best fit line is also called a least squares regression line here ya go!
 Linear Modeling Exercises Pages 308 311 Problems 1 4, 5-9 (you might want to do the E exercises next), 20 In case you d like to see why the best fit line is also called a least squares regression line
Linear Modeling Exercises Pages 308 311 Problems 1 4, 5-9 (you might want to do the E exercises next), 20 In case you d like to see why the best fit line is also called a least squares regression line
Robotics. BEGINNERS: Mondays 4:00 to 5:15 PM April 10 to June 12 LEVEL 3: Thursdays 4:00 to 5:15 PM April 20 to June 8
 Robotics 3 & 4 Intro to Robotics (co-ed) Help your child develop science, math, and teamwork skills through building and basic programming with LEGO Smarthub 2 I/O robots. Children in higher levels will
Robotics 3 & 4 Intro to Robotics (co-ed) Help your child develop science, math, and teamwork skills through building and basic programming with LEGO Smarthub 2 I/O robots. Children in higher levels will
Project Scoping Report Appendix B Project Web Site. APPENDIX B Project Web Site
 Project Scoping Report Appendix B Project Web Site APPENDIX B Project Web Site WESTSIDE EXTENSION TRANSIT CORRIDOR STUDY February 4, 2008 News and Info of 1 http://metro.net/projects_programs/westside/news_info.htm#topofpage
Project Scoping Report Appendix B Project Web Site APPENDIX B Project Web Site WESTSIDE EXTENSION TRANSIT CORRIDOR STUDY February 4, 2008 News and Info of 1 http://metro.net/projects_programs/westside/news_info.htm#topofpage
Traffic Operations with Connected and Automated Vehicles
 Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
AI challenges for Automated & Connected Vehicles
 AI challenges for Automated & Connected Vehicles Pr. Fabien MOUTARDE Center for Robotics MINES ParisTech PSL Université Fabien.Moutarde@mines-paristech.fr http://people.mines-paristech.fr/fabien.moutarde
AI challenges for Automated & Connected Vehicles Pr. Fabien MOUTARDE Center for Robotics MINES ParisTech PSL Université Fabien.Moutarde@mines-paristech.fr http://people.mines-paristech.fr/fabien.moutarde
Enhanced Road Assessment (ERA) Frequently Asked Questions
 Frequently Asked Questions") Before Your ERA Q: Why was I referred to the ERA? A: Drivers of any age with a medical condition that may affect the motor, cognitive or sensory functions required for driving may be referred to the ERA
Before Your ERA Q: Why was I referred to the ERA? A: Drivers of any age with a medical condition that may affect the motor, cognitive or sensory functions required for driving may be referred to the ERA
Systems-Theoretic Process Analysis: AUTOMOBILE FEATURES FOR LANE MANAGEMENT
 Systems-Theoretic Process Analysis: AUTOMOBILE FEATURES FOR LANE MANAGEMENT Diogo Castilho, Megan France & Dajiang Suo Image source: 1 LADAR image of London streets (The New York Times, 11/11/15) 1 MOTIVATION
Systems-Theoretic Process Analysis: AUTOMOBILE FEATURES FOR LANE MANAGEMENT Diogo Castilho, Megan France & Dajiang Suo Image source: 1 LADAR image of London streets (The New York Times, 11/11/15) 1 MOTIVATION
Robotic Motor Solutions
 Robotic Motor Solutions K O L L M O R G E N R O B O T I C S O L U T I O N S Rely on Kollmorgen Solutions We focus on motion so you don t have to. Our reputation for enabling robotic innovation continues
Robotic Motor Solutions K O L L M O R G E N R O B O T I C S O L U T I O N S Rely on Kollmorgen Solutions We focus on motion so you don t have to. Our reputation for enabling robotic innovation continues
AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS. Innovation Bazaar, Vehicle ICT Arena ver 2. RISE Viktoria Kent Eric Lång
 AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS Innovation Bazaar, Vehicle ICT Arena 2018-02-08 ver 2 Research Institutes of Sweden RISE Viktoria Kent Eric Lång 2 AUTONOMOUS DRIVING AND
AUTONOMOUS DRIVING COLLABORATIVE APPROACH NEEDED FOR BIG BUSINESS Innovation Bazaar, Vehicle ICT Arena 2018-02-08 ver 2 Research Institutes of Sweden RISE Viktoria Kent Eric Lång 2 AUTONOMOUS DRIVING AND
D.J.Kulkarni, Deputy Director, ARAI
 D.J.Kulkarni, Deputy Director, ARAI Why advanced ITS and Safety Systems? Building Ideal Vehicles Safer & More comfortable Why Advanced ITS & Safety Systems? contd. Insert Road Accident Deaths graph from
D.J.Kulkarni, Deputy Director, ARAI Why advanced ITS and Safety Systems? Building Ideal Vehicles Safer & More comfortable Why Advanced ITS & Safety Systems? contd. Insert Road Accident Deaths graph from
henry ford Differentiated reading passages
 henry ford Differentiated reading passages A Note From The Seller: I have found that integrating whenever and wherever possible is a great way to make sure that I am addressing all of the Common Core Standards
henry ford Differentiated reading passages A Note From The Seller: I have found that integrating whenever and wherever possible is a great way to make sure that I am addressing all of the Common Core Standards
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2009 Advanced Applications: Robotics / Vision / Language Dan Klein UC Berkeley Many slides from Pieter Abbeel, John DeNero 1 Announcements Contest: amazing stuff 59
CS 188: Artificial Intelligence Fall 2009 Advanced Applications: Robotics / Vision / Language Dan Klein UC Berkeley Many slides from Pieter Abbeel, John DeNero 1 Announcements Contest: amazing stuff 59
Announcements. CS 188: Artificial Intelligence Fall Motivating Example. Today. Autonomous Helicopter Flight. Autonomous Helicopter Setup
 CS 188: Artificial Intelligence Fall 2009 Advanced Applications: Robotics / Vision / Language Announcements Contest: amazing stuff 59 teams! Final qualifying tournament almost done running! Congrats to
CS 188: Artificial Intelligence Fall 2009 Advanced Applications: Robotics / Vision / Language Announcements Contest: amazing stuff 59 teams! Final qualifying tournament almost done running! Congrats to
Sciences for Maneuver Campaign
 Mr. Eric Spero Sciences for Maneuver Campaign U.S. Army Research Laboratory Ground Air Sciences for Maneuver Campaign Science & Technology enabled air and ground platform capabilities to significantly
Mr. Eric Spero Sciences for Maneuver Campaign U.S. Army Research Laboratory Ground Air Sciences for Maneuver Campaign Science & Technology enabled air and ground platform capabilities to significantly
SMART PASSENGER TRANSPORT
 World Robot Olympiad 2019 Regular Category Elementary SMART CITIES SMART PASSENGER TRANSPORT Version: January 15 th WRO International Premium Partners Table of Contents 1. Introduction... 2 2. Game Field...
World Robot Olympiad 2019 Regular Category Elementary SMART CITIES SMART PASSENGER TRANSPORT Version: January 15 th WRO International Premium Partners Table of Contents 1. Introduction... 2 2. Game Field...
AUTONOMOUS CARS: TECHNIQUES AND CHALLENGES
 youtube.com/watch?v=ollfk8osnem AUTONOMOUS CARS: TECHNIQUES AND CHALLENGES Slides: https://dhgo.to/coe-cars Prof. Dr. Dominik Herrmann // University of Bamberg (Germany) Often inappropriately used. How
youtube.com/watch?v=ollfk8osnem AUTONOMOUS CARS: TECHNIQUES AND CHALLENGES Slides: https://dhgo.to/coe-cars Prof. Dr. Dominik Herrmann // University of Bamberg (Germany) Often inappropriately used. How
Vehicle Steering Control with Human-in-the-Loop
 Vehicle Steering Control with Human-in-the-Loop Mengzhe Huang, Weinan Gao, Zhong-Ping Jiang(IEEE/IFAC Fellow) Email: {m.huang, weinan.gao, zjiang}@nyu.edu} Control and Networks Lab, Department of Electrical
Vehicle Steering Control with Human-in-the-Loop Mengzhe Huang, Weinan Gao, Zhong-Ping Jiang(IEEE/IFAC Fellow) Email: {m.huang, weinan.gao, zjiang}@nyu.edu} Control and Networks Lab, Department of Electrical
BASIC MECHATRONICS ENGINEERING
 MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY Lecture Summary on BASIC MECHATRONICS ENGINEERING NTA - 4 Mechatronics Engineering 2016 Page 1 INTRODUCTION TO MECHATRONICS Mechatronics is the field of study
MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY Lecture Summary on BASIC MECHATRONICS ENGINEERING NTA - 4 Mechatronics Engineering 2016 Page 1 INTRODUCTION TO MECHATRONICS Mechatronics is the field of study
ZF Advances Key Technologies for Automated Driving
 Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
Page 1/5, January 9, 2017 ZF Advances Key Technologies for Automated Driving ZF s See Think Act supports self-driving cars and trucks ZF and NVIDIA provide computing power to bring artificial intelligence
Course Syllabus
 John D. Rockefeller Truck Driver Training Program Course Syllabus 2013-14 INSTRUCTOR: John Barber, Tim Egyud CLASSROOM: JDRCC DOOR 6 OFFICE HRS: 7:00-2:00 M-F OFFICE PH: 304-564-3337 extension 118 MOBILE
John D. Rockefeller Truck Driver Training Program Course Syllabus 2013-14 INSTRUCTOR: John Barber, Tim Egyud CLASSROOM: JDRCC DOOR 6 OFFICE HRS: 7:00-2:00 M-F OFFICE PH: 304-564-3337 extension 118 MOBILE
Sustainable Intelligent Mining Systems. World Class Demonstrations. Morgan Rody
 Sustainable Intelligent Mining Systems World Class Demonstrations Morgan Rody Horizon 2020 Horizon 2020 is the biggest EU Research and Innovation program ever with nearly 80 billion of funding available
Sustainable Intelligent Mining Systems World Class Demonstrations Morgan Rody Horizon 2020 Horizon 2020 is the biggest EU Research and Innovation program ever with nearly 80 billion of funding available
How It Rolls Out. Vehicle Automation and the Future of Personal Transportation. Melissa Ruhl April 2015 ITE SF Bay Area
 How It Rolls Out Vehicle Automation and the Future of Personal Transportation Melissa Ruhl April 2015 ITE SF Bay Area The horseless carriage? Where are we at today? Where are we at today? Defining vehicle
How It Rolls Out Vehicle Automation and the Future of Personal Transportation Melissa Ruhl April 2015 ITE SF Bay Area The horseless carriage? Where are we at today? Where are we at today? Defining vehicle
The Imperative to Deploy. Automated Driving. CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper
 Stepper") The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
Hello and welcome to training on general purpose motor drivers in the 3 to 15 volt range. I m Paul Dieffenderfer & I will be your host for this
 Hello and welcome to training on general purpose motor drivers in the 3 to 15 volt range. I m Paul Dieffenderfer & I will be your host for this presentation prepared by H. Tanaka of the LSI Division. 1
Hello and welcome to training on general purpose motor drivers in the 3 to 15 volt range. I m Paul Dieffenderfer & I will be your host for this presentation prepared by H. Tanaka of the LSI Division. 1
AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport
: Developing Automated Driving Pilots for IoT: Brainport") AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport 31 May 2018 16.00-17.00 CET 31/05/2018 This project has received funding from the European Union s Horizon 2020 research
AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport 31 May 2018 16.00-17.00 CET 31/05/2018 This project has received funding from the European Union s Horizon 2020 research
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
AUTOMOTIVE CONTROL SYSTEMS
 AUTOMOTIVE CONTROL SYSTEMS This engineering textbook is designed to introduce advanced control systems for vehicles, including advanced automotive concepts and the next generation of vehicles for Intelligent
AUTOMOTIVE CONTROL SYSTEMS This engineering textbook is designed to introduce advanced control systems for vehicles, including advanced automotive concepts and the next generation of vehicles for Intelligent
THE FUTURE OF AUTONOMOUS CARS
 Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
SHARE THE ROAD SAFELY WITH TRUCKS!
 SAFETY MEETING PLANNER & AGENDA SHARE THE ROAD SAFELY WITH TRUCKS! Meeting Leader: Prepare in advance to make this meeting effective. Go to the Thinking Driver website for instructions on how to best use
SAFETY MEETING PLANNER & AGENDA SHARE THE ROAD SAFELY WITH TRUCKS! Meeting Leader: Prepare in advance to make this meeting effective. Go to the Thinking Driver website for instructions on how to best use
Training Program 2018 Where Education Meets Technology
 Training Program 2018 Where Education Meets Technology January December 2018 Training Program 2018 At Ziehm Imaging, we are strongly committed to our customers and their patients. Which means a lot more
Training Program 2018 Where Education Meets Technology January December 2018 Training Program 2018 At Ziehm Imaging, we are strongly committed to our customers and their patients. Which means a lot more
WHO WE ARE. Our young, dynamic and experienced team can create for Your Brand a visual masterpiece that will wow your audience!
 MAD EXPO PORTFOLIO ESTEEMED PARTNERS 3 WHO WE ARE Our young, dynamic and experienced team can create for Your Brand a visual masterpiece that will wow your audience! We cater to all your needs from Concept
MAD EXPO PORTFOLIO ESTEEMED PARTNERS 3 WHO WE ARE Our young, dynamic and experienced team can create for Your Brand a visual masterpiece that will wow your audience! We cater to all your needs from Concept
Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution)
") Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution) Christian Laugier To cite this version: Christian Laugier. Autnonomous Vehicles: Societal and Technological Evolution (Invited
Autnonomous Vehicles: Societal and Technological Evolution (Invited Contribution) Christian Laugier To cite this version: Christian Laugier. Autnonomous Vehicles: Societal and Technological Evolution (Invited
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers
 Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
NSSE 2017 U.S. Summary Frequencies
 1. During the current school year, about how often have you done the following? a. Asked questions or askquest Never 187 2 495 4 310 4 348 3 529 3 98 3 191 2 413 4 572 3 188 3 3,702 3 contributed to course
1. During the current school year, about how often have you done the following? a. Asked questions or askquest Never 187 2 495 4 310 4 348 3 529 3 98 3 191 2 413 4 572 3 188 3 3,702 3 contributed to course
Beyond Autonomous Cars; Open Autonomous Vehicle Safety Competitions. Mike Cannon Boyd Wilson Clemson University & Omnibond
 Beyond Autonomous Cars; Open Autonomous Vehicle Safety Competitions Mike Cannon Boyd Wilson Clemson University & Omnibond Abstract By applying open collaborative concepts, to autonomous vehicle research,
Beyond Autonomous Cars; Open Autonomous Vehicle Safety Competitions Mike Cannon Boyd Wilson Clemson University & Omnibond Abstract By applying open collaborative concepts, to autonomous vehicle research,
Driver Safety. Common Crashes and Ways to Avoid Them. 8/20/2004 WTTA Tow Show
 Driver Safety Common Crashes and Ways to Avoid Them Main Areas of Safety Program Crash Prevention : safe following distance, backing, turns & merges, etc. Towing Safety: safety chains, roadside safety,
Driver Safety Common Crashes and Ways to Avoid Them Main Areas of Safety Program Crash Prevention : safe following distance, backing, turns & merges, etc. Towing Safety: safety chains, roadside safety,
MONTANA TEEN DRIVER CURRICULUM GUIDE Lesson Plan & Teacher Commentary. Module 2.2 Basic Control and Vehicle Location
 MONTANA TEEN DRIVER CURRICULUM GUIDE Lesson Plan & Teacher Commentary Module 2.2 Basic Control and Vehicle Location Lesson Objective (from Essential Knowledge and Skills Topics): Topic 6. Performing Basic
MONTANA TEEN DRIVER CURRICULUM GUIDE Lesson Plan & Teacher Commentary Module 2.2 Basic Control and Vehicle Location Lesson Objective (from Essential Knowledge and Skills Topics): Topic 6. Performing Basic
COURSE NUMBER & COURSE TITLE: ME 300 Fluid Power Transmission & Control
 COURSE NUMBER & COURSE TITLE: ME 300 Fluid Power Transmission & Control INSTRUCTOR:, Credits: 3 Tao jianfeng REQUIRED COURSE OR ELECTIVE COURSE: Elective Language of instruction: Chinese TERMS OFFERED:
COURSE NUMBER & COURSE TITLE: ME 300 Fluid Power Transmission & Control INSTRUCTOR:, Credits: 3 Tao jianfeng REQUIRED COURSE OR ELECTIVE COURSE: Elective Language of instruction: Chinese TERMS OFFERED:
Announcements. CS 188: Artificial Intelligence Fall So Far: Foundational Methods. Now: Advanced Applications.
 CS 188: Artificial Intelligence Fall 2010 Advanced Applications: Robotics / Vision / Language Announcements Project 5: Classification up now! Due date now after contest Also: drop-the-lowest Contest: In
CS 188: Artificial Intelligence Fall 2010 Advanced Applications: Robotics / Vision / Language Announcements Project 5: Classification up now! Due date now after contest Also: drop-the-lowest Contest: In
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2010 Advanced Applications: Robotics / Vision / Language Dan Klein UC Berkeley Many slides from Pieter Abbeel, John DeNero 1 Announcements Project 5: Classification
CS 188: Artificial Intelligence Fall 2010 Advanced Applications: Robotics / Vision / Language Dan Klein UC Berkeley Many slides from Pieter Abbeel, John DeNero 1 Announcements Project 5: Classification
Formal Methods will not Prevent Self-Driving Cars from Having Accidents
 Formal Methods will not Prevent Self-Driving Cars from Having Accidents Thierry Fraichard INRIA, LIG-CNRS and Grenoble University Forum Méthodes Formelles Mardi 10 octobre 2017 From Mobile Robots to Self-Driving
Formal Methods will not Prevent Self-Driving Cars from Having Accidents Thierry Fraichard INRIA, LIG-CNRS and Grenoble University Forum Méthodes Formelles Mardi 10 octobre 2017 From Mobile Robots to Self-Driving
PREVIEW ONLY. Course 106 INSTRUCTOR GUIDE. HVAC Systems Introduction and Overview. Module 1: Overview of Rail Car HVAC and General Safety Procedures
 Course 106 HVAC Systems Introduction and Overview Module 1: Overview of Rail Car HVAC and General Safety Procedures INSTRUCTOR GUIDE Table of Contents CHECKLIST FOR INSTRUCTION... 3 SUPPLIES, AUDIO-VISUAL
Course 106 HVAC Systems Introduction and Overview Module 1: Overview of Rail Car HVAC and General Safety Procedures INSTRUCTOR GUIDE Table of Contents CHECKLIST FOR INSTRUCTION... 3 SUPPLIES, AUDIO-VISUAL
Unmanned autonomous vehicles in air land and sea
 based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
based on Ulrich Schwesinger lecture on MOTION PLANNING FOR AUTOMATED CARS Unmanned autonomous vehicles in air land and sea Some relevant examples from the DARPA Urban Challenge Matteo Matteucci matteo.matteucci@polimi.it
GENERAL CHEMISTRY. Sub-disciplines of Chemistry. Course Organization. Course Organization: People. What You Need for Lecture
 GENERAL CHEMISTRY Welcome! Sub-disciplines of Chemistry Physical Q: What is chemistry? Organic Inorganic The study of the composition, properties, and reactions of all types of matter Analytical Biochemistry
GENERAL CHEMISTRY Welcome! Sub-disciplines of Chemistry Physical Q: What is chemistry? Organic Inorganic The study of the composition, properties, and reactions of all types of matter Analytical Biochemistry
THE TRACTOR TRAILER BOOK: PRACTICAL ADVICE FOR DRIVING TRACTOR TRAILERS 2ND EDITION BY JIMMY COX
 Read Online and Download Ebook THE TRACTOR TRAILER BOOK: PRACTICAL ADVICE FOR DRIVING TRACTOR TRAILERS 2ND EDITION BY JIMMY COX DOWNLOAD EBOOK : THE TRACTOR TRAILER BOOK: PRACTICAL ADVICE FOR Click link
Read Online and Download Ebook THE TRACTOR TRAILER BOOK: PRACTICAL ADVICE FOR DRIVING TRACTOR TRAILERS 2ND EDITION BY JIMMY COX DOWNLOAD EBOOK : THE TRACTOR TRAILER BOOK: PRACTICAL ADVICE FOR Click link
Aural Skills I Syllabus Spring 2015
 Aural Skills I Syllabus Spring 2015 The University of North Carolina Asheville MUSC 201 (1 credit hour) Prerequisite: MUSC 131, or passing grade on theory proficiency exam Corequisite: MUSC 231 Section
Aural Skills I Syllabus Spring 2015 The University of North Carolina Asheville MUSC 201 (1 credit hour) Prerequisite: MUSC 131, or passing grade on theory proficiency exam Corequisite: MUSC 231 Section
Higher National Unit Specification. General information for centres. Electrical Motors and Motor Starting. Unit code: DV9M 34
 Higher National Unit Specification General information for centres Unit title: Electrical Motors and Motor Starting Unit code: DV9M 34 Unit purpose: This Unit has been developed to provide candidates with
Higher National Unit Specification General information for centres Unit title: Electrical Motors and Motor Starting Unit code: DV9M 34 Unit purpose: This Unit has been developed to provide candidates with
Course Syllabus. Time Requirements. Course Timeline. Grading Policy. Contact Information Online classroom Instructor: Kyle Boots
 Course Syllabus Course Overview This course is designed to meet the classroom requirement of your driver s education experience. It is approved by the State of Indiana. Time Requirements The State of Indiana
Course Syllabus Course Overview This course is designed to meet the classroom requirement of your driver s education experience. It is approved by the State of Indiana. Time Requirements The State of Indiana
Smart systems. Smart traffic. Siemens Intelligent Traffic Systems
 Smart systems. Smart traffic. Siemens Intelligent Traffic Systems Unrestricted Siemens AG 2019 siemens.com/traffic The world of mobility is facing tremendous challenges We are facing the next mobility
Smart systems. Smart traffic. Siemens Intelligent Traffic Systems Unrestricted Siemens AG 2019 siemens.com/traffic The world of mobility is facing tremendous challenges We are facing the next mobility
Engaging Inquiry-Based Activities Grades 3-6
 ELECTRICITY AND CIRCUITS Engaging Inquiry-Based Activities Grades 3-6 Janette Smith 2016 Janette Smith 2016 1 What s Inside Activity 1: Light it Up!: Students investigate different ways to light a light
ELECTRICITY AND CIRCUITS Engaging Inquiry-Based Activities Grades 3-6 Janette Smith 2016 Janette Smith 2016 1 What s Inside Activity 1: Light it Up!: Students investigate different ways to light a light
Certificate in a vocational program
 N 3,328 5,148 2,928 3,219 3,546 2,004 3,730 3,982 2,327 30,212 GOALS AND PLANS 2. What is your educational goal at this college? High school diploma or GED 1.9 1.3 2.2 1.4 2.2 2.2 1.9 2.0 1.7 1.8 Certificate
N 3,328 5,148 2,928 3,219 3,546 2,004 3,730 3,982 2,327 30,212 GOALS AND PLANS 2. What is your educational goal at this college? High school diploma or GED 1.9 1.3 2.2 1.4 2.2 2.2 1.9 2.0 1.7 1.8 Certificate
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
SYSTEM CONFIGURATION OF INTELLIGENT PARKING ASSISTANT SYSTEM
 SYSTEM CONFIGURATION OF INTELLIGENT PARKING ASSISTANT SYSTEM Ho Gi Jung *, Chi Gun Choi, Dong Suk Kim, Pal Joo Yoon MANDO Corporation ZIP 446-901, 413-5, Gomae-Dong, Giheung-Gu, Yongin-Si, Kyonggi-Do,
SYSTEM CONFIGURATION OF INTELLIGENT PARKING ASSISTANT SYSTEM Ho Gi Jung *, Chi Gun Choi, Dong Suk Kim, Pal Joo Yoon MANDO Corporation ZIP 446-901, 413-5, Gomae-Dong, Giheung-Gu, Yongin-Si, Kyonggi-Do,
DRIVING Question: Is it important to know how to drive? Are you a good driver? Complete the paragraph on the right with the words on the left.
 Question: Is it important to know how to drive? Are you a good driver? Complete the paragraph on the right with the words on the left. The year is 2020, and it s 7:45 on a rainy, Monday morning. You are
Question: Is it important to know how to drive? Are you a good driver? Complete the paragraph on the right with the words on the left. The year is 2020, and it s 7:45 on a rainy, Monday morning. You are
Course Code: Bendix Wingman Fusion System Overview Study Guide
 Course Code: 8792 Bendix Wingman Fusion System Overview Study Guide 2015 Navistar, Inc. 2701 Navistar Drive, Lisle, IL 60532. All rights reserved. No part of this publication may be duplicated or stored
Course Code: 8792 Bendix Wingman Fusion System Overview Study Guide 2015 Navistar, Inc. 2701 Navistar Drive, Lisle, IL 60532. All rights reserved. No part of this publication may be duplicated or stored
LISTEN A MINUTE.com. Speed. Focus on new words, grammar and pronunciation in this short text.
 LISTEN A MINUTE.com Speed http://www.listenaminute.com/s/speed.html One minute a day is all you need to improve your listening skills. Focus on new words, grammar and pronunciation in this short text.
LISTEN A MINUTE.com Speed http://www.listenaminute.com/s/speed.html One minute a day is all you need to improve your listening skills. Focus on new words, grammar and pronunciation in this short text.
Rules. Mr. Ron Kurjanowicz
 Rules Mr. Ron Kurjanowicz Rules and Procedures Preliminary rules open for comment until September 1, 2004 Final rules available before October 1, 2004 DARPA will publish procedure documents with details
Rules Mr. Ron Kurjanowicz Rules and Procedures Preliminary rules open for comment until September 1, 2004 Final rules available before October 1, 2004 DARPA will publish procedure documents with details
Orientation and Conferencing Plan Stage 1
 Orientation and Conferencing Plan Stage 1 Orientation Ensure that you have read about using the plan in the Program Guide. Book summary Read the following summary to the student. Everyone plays with the
Orientation and Conferencing Plan Stage 1 Orientation Ensure that you have read about using the plan in the Program Guide. Book summary Read the following summary to the student. Everyone plays with the
Porsche unveils 4-door sports car
 www.breaking News English.com Ready-to-use ESL / EFL Lessons Porsche unveils 4-door sports car URL: http://www.breakingnewsenglish.com/0507/050728-porsche-e.html Today s contents The Article 2 Warm-ups
www.breaking News English.com Ready-to-use ESL / EFL Lessons Porsche unveils 4-door sports car URL: http://www.breakingnewsenglish.com/0507/050728-porsche-e.html Today s contents The Article 2 Warm-ups
Thermal Imaging-Based Vehicle Classification in Nighttime Traffic Apiwat Sangnoree King Mongkut s University of Technology Thonburi Kosin Chamnongthai
 Thermal Imaging-Based Vehicle Classification in Nighttime Traffic Apiwat Sangnoree King Mongkut s University of Technology Thonburi Kosin Chamnongthai King Mongkut s University of Technology Thonburi Figure
Thermal Imaging-Based Vehicle Classification in Nighttime Traffic Apiwat Sangnoree King Mongkut s University of Technology Thonburi Kosin Chamnongthai King Mongkut s University of Technology Thonburi Figure
Dr. Punarjay (Jay) Chakravarty
 Chakravarty") Dr. Punarjay (Jay) Chakravarty E-Mail: punarjay [at] gmail.com Website: http://www.jaychakravarty.com. Born: May 23, 1981. Residency: Australian citizen. Objective To pursue academic and industry-based
Dr. Punarjay (Jay) Chakravarty E-Mail: punarjay [at] gmail.com Website: http://www.jaychakravarty.com. Born: May 23, 1981. Residency: Australian citizen. Objective To pursue academic and industry-based
A car-free world? Name:... Date:... Car-free Day comprehension. The Development of Cars
 Name:... Date:... Car-free Day comprehension The Development of Cars The very first car was a steam powered tricycle and it looked like this. It was invented by a French man called Nicolas Cugnot and was
Name:... Date:... Car-free Day comprehension The Development of Cars The very first car was a steam powered tricycle and it looked like this. It was invented by a French man called Nicolas Cugnot and was
GCAT. University of Michigan-Dearborn
 GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
GCAT University of Michigan-Dearborn Mike Kinnel, Joe Frank, Siri Vorachaoen, Anthony Lucente, Ross Marten, Jonathan Hyland, Hachem Nader, Ebrahim Nasser, Vin Varghese Department of Electrical and Computer
ECSE-2100 Fields and Waves I Spring Project 1 Beakman s Motor
 Names _ and _ Project 1 Beakman s Motor For this project, students should work in groups of two. It is permitted for groups to collaborate, but each group of two must submit a report and build the motor
Names _ and _ Project 1 Beakman s Motor For this project, students should work in groups of two. It is permitted for groups to collaborate, but each group of two must submit a report and build the motor
Livingston County Road Commission removes snow from: Miles of more than two lane blacktop roads
 Livingston County Road Commission removes snow from: 413.66 Miles of two lane blacktop roads 20.94 Miles of more than two lane blacktop roads 275.53 Miles of subdivision roads 65.33 Miles of primary gravel
Livingston County Road Commission removes snow from: 413.66 Miles of two lane blacktop roads 20.94 Miles of more than two lane blacktop roads 275.53 Miles of subdivision roads 65.33 Miles of primary gravel
A new perspective. The Kalmar RTG range.
 A new perspective. The range. All new s enable you to take advantage of automating some or all of your processes; from remote control to fully automated moves. Securing the future of your business. s extensive
A new perspective. The range. All new s enable you to take advantage of automating some or all of your processes; from remote control to fully automated moves. Securing the future of your business. s extensive
Driver s Pathway Anticipation
 Chair for Computer Aided Medical Procedures & campar.in.tum.de Fachgebiet Driver s Pathway Anticipation Anca Berariu berariu@in.tum.de 24 April 2007 Department of Informatics Technische Universität München
Chair for Computer Aided Medical Procedures & campar.in.tum.de Fachgebiet Driver s Pathway Anticipation Anca Berariu berariu@in.tum.de 24 April 2007 Department of Informatics Technische Universität München
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
SELF DRIVING VEHICLE WITH CONTROL SYSTEM USING STEREOVISION TECHNIQUE
 SELF DRIVING VEHICLE WITH CONTROL SYSTEM USING STEREOVISION TECHNIQUE Kekan S M*, Dr. Mittal S K Department of Electrical Engineering, G.H. Raisoni Institute of Engineering and Technology, Wagholi, Pune-412207,
SELF DRIVING VEHICLE WITH CONTROL SYSTEM USING STEREOVISION TECHNIQUE Kekan S M*, Dr. Mittal S K Department of Electrical Engineering, G.H. Raisoni Institute of Engineering and Technology, Wagholi, Pune-412207,