INTRODUCTION TO MECHATRONICS PRASHANT AMBADEKAR
|
|
|
- Dale Bradley
- 5 years ago
- Views:
Transcription
1 INTRODUCTION TO MECHATRONICS PRASHANT AMBADEKAR
2 WHAT IS CONTROL? Control is the process of altering, manually or automatically, the performance of a system to a desired one. WHY CONTROL? Because systems by themselves usually do not behave the way we would like them to
3 Manual Control System Consider a simple manual control system shown below.
4 Automatic Control System

5 Manual/Automatic Control System Automatic control describes the situation in which a machine is controlled by another machine.

6 Activity - TPS What do these devices have in common?
7 Essentials in Mechatronics System

8 Toaster A Mechatronics Application

9 Toaster A Mechatronics Application

10 Toaster A Mechatronics Application

11 Toaster A Mechatronics Application

12 Toaster A Mechatronics Application

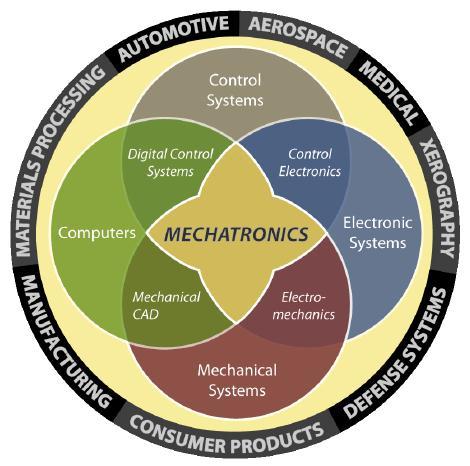
13 DEFINITION OF MECHATRONICS Mechatronics is a concept of Japanese origin (1970 s) and can be defined as the application of electronics and computer technology to control the motions of mechanical systems. The term mechatronics was coined by Yasakawa Electric Company to refer to the use of electronics in mechanical control
14 DEFINITION OF MECHATRONICS Integration of electronics, control engineering, and mechanical engineering. W. Bolton Application of complex decision making to the operation of physical systems. D. M. Auslander and C. J. Kempf Synergistic integration of mechanical engineering with electronics and intelligent computer control in the design and manufacturing of industrial products and processes. F. Harshama, M. Tomizuka
15 DEFINITION OF MECHATRONICS Synergistic use of precision engineering, control theory, computer science, and sensor and actuator technology to design improved products and processes. S. Ashley Methodology used for the optimal design of electromechanical products. D. Shetty and R. A Kolk Field of study involving the analysis, design, synthesis, and selection of systems that combine electronics and mechanical components with modern controls and microprocessors. D. G. Alciatore and M. B. Histand
16 DEFINITION OF MECHATRONICS Mechatronics is defined as the interdisciplinary field of engineering that deals with the design of products whose function relies on the integration of mechanical, electrical, and electronic components connected by a control scheme. Computer algorithm to modify the behavior of a mechanical system. Electronics are used to transduce information between the computer science and mechanical disciplines.
17 DEFINITION OF MECHATRONICS Mechatronics: Working Definition Mechatronics is the synergistic integration of sensors, actuators, signal conditioning, power electronics, decision and control algorithms, and computer hardware and software to manage complexity, uncertainty, and communication in engineered systems.
18 MECHATRONICS Controller is mind of the mechatronic system that processes user commands and sensed signals to generate command signals to be sent to the actuators in the system.
19 MECHATRONICS
20 ADVANTAGES OF MECHATRONICS It has made easy to design products and processes. Mechatronics system helps in optimizing performance and quality. The products produced are cost effective and of good quality. Higher degree of flexibility.
21 DISADVANTAGES OF MECHATRONICS Knowledge of different engineering disciplines for design and implementation is imperative. It is expensive to incorporate mechatronics approach to an existing / old system. Specific problems for various systems will have to be addressed separately and properly. High initial cost of the system.
22 OBJECTIVES OF MECHATRONICS To improve products and processes. To develop novel mechanism. To design new products. To create new technology using novel concepts.
23 SENSOR Sensor is a device that responds to a change in the physical phenomenon. Sensors are required to monitor the performance of machines and processes. Transducer is a device that converts one form of energy into another form of energy. Some of the more common measurement variables in mechatronics systems are temperature, speed, position, force, torque, and acceleration.
24 VARIOUS SENSOR Proximity sensors Limit switches Potentiometer Digital optical encoder Strain gage Load cells Linear variable differential transformer Bimetallic strip Thermocouple Accelerometer Surface acoustic wave as sensor Hall effect sensor Resistance temperature detector
25 USE OF SENSORS / TRANSDUCERS To provide information of the measuring element. Position, velocity or acceleration. To act as protective mechanism for the system. To help eliminate redundant devices. Complex or expensive feeding or sorting devices. To provide real time information concerning nature of the task being performed. To provide identification and indication of the presence of different components.
26 ACTUATOR Kind of motor that controls / moves mechanisms / systems. Mechanism that converts electrical signals into useful mechanical motion or action. Actuation involves a physical acting on the process initiated by a sensor. It takes hydraulic fluid, electric current or other sources of power and converts the energy to facilitate the motion. Actuators produce either linear, rotary or oscillatory motion.
27 ACTUATOR Speed is vital in the case of motion control equipment. Process of converting sources of power into energy has been a great innovation to machinery. Efficiency brought about by actuators make them a cost effective alternative to human operation. There are four main types of actuators: Hydraulic, Pneumatic, Electric and Mechanical. Unconventional actuators
28 HYDRAULIC ACTUATOR It consist of a cylinder or motor that utilizes hydraulic power to facilitate mechanical process. Mechanical motion gives an output in terms of linear, rotary or oscillatory motion. LIMITATION: Since liquids are nearly incompressible, they take longer to gain speed and power ADVANTAGE: Can exert great force. Precise control of the movement produced.
29 HYDRAULIC ACTUATOR MODE OF OPERATION: Manually, such as a hydraulic car jack Through a hydraulic pump, which can be seen in construction equipment such as cranes or excavators. WORKING: Linear actuators consists of a hollow cylinder that contains fluid and a piston that is inserted in it. When pressure is applied onto the piston, objects can be moved by the force produced.
30 PNEUMATIC ACTUATOR Pneumatic actuators work on the same concept as hydraulic actuators Fluid used is compressed gas instead of liquid. Energy is converted into linear or rotary motion depending on the type of actuator.
31 PNEUMATIC ACTUATOR PREFERRED: For quick operation. Places where cleanliness is important LIMITATIONS: Leakage Less efficient compared to mechanical actuators. Create noise More space is needed
32 ELECTRIC ACTUATOR Devices powered by motors that convert electrical energy to mechanical torque. Electrical energy is used to create motion in equipment. Since no oil is involved, electrical actuators are considered to be one of the cleanest and readily available forms of actuators. Electric actuators are typically installed in engines, where they open and close different valves.
33 MECHANICAL ACTUATOR Mechanical actuators function through converting rotary motion to linear motion. It receives energy from various source.
34 VARIOUS ACTUATORS Solenoids Relays Electric motors Voice coil Piezoelectric Gear Cam Chain drive Harmonic drive Comb drive
35 EXAMPLES OF MECHATRONICS SYSTEM
36 EXAMPLES OF MECHATRONICS SYSTEM Mechatronic systems are commonly found in homes, offices, schools, shops, and of course, in industrial applications. Common mechatronic systems include: Domestic appliances: Fridges and freezers, microwave ovens, washing machines, vacuum cleaners, dishwashers, mixers, blenders, stereos, televisions, telephones, lawn mowers, digital cameras, videos and CD players, camcorders, and many other similar modern devices. Domestic systems: Air conditioning units, security systems, automatic gate control systems.
37 EXAMPLES OF MECHATRONICS SYSTEM Office equipment: Laser printers, scanners, photocopiers, fax machines, as well as other computer peripherals. Retail equipment: Bar-coding machines, and tills found in supermarkets. Banking systems: Note counting machines, and automatic teller machines. Manufacturing equipment: Numerically controlled (NC) tools, pick-and-place robots, welding robots, automated guided vehicles (AGVs), and other industrial robots.
38 EXAMPLES OF MECHATRONICS SYSTEM Aviation systems: cockpit controls and instrumentation, flight control actuators, landing gear systems, and other aircraft subsystems. Automobile system: ABS, air-bags, parking (proximity) sensors, anti-theft electronic keys, door lock system etc. Elevators and escalators Mobile robots and manipulator arms Sorting and packaging systems in production lines
39 EXAMPLES OF MECHATRONICS SYSTEM Computer Numerically Control (CNC) machines Aeroplanes and helicopters Tank fluid level and temperature control systems: Temperature control system in an industrial oven Heat-seeking missiles: These are complex systems that require extremely fast responses. A poor or slow controller could easily lead to the destruction of the missile. The orientation of the missile will be controlled based on the heat signal received from the target. Coordinate Measuring Machines (CMM)
40 EXAMPLES OF MECHATRONICS SYSTEM Automatically stops when the door is opened. Software control with various programmes. Revolution and rotation may start synchronously during paint mixing. The revolution and rotation speed is controlled perfectly to make sure the machine will work steadily.

41 EXAMPLES OF MECHATRONICS SYSTEM Automatic clamping and opening setting Speed control to ensure stable operation. Self checking program runs automatically before operation. Controller activates alarm in case of abnormality. Digital display to show actual time and set time so that exact mixing is obtained. Automatic identification of the drum size to offer adequate clamping power and rotation speed.
42 EXAMPLES OF MECHATRONICS SYSTEM sensor Light sensor Measures the brightness of ambient light Thermometer measuring ambient temperature. Accelerometer Barometer Proximity sensor Measures acceleration that handset experiences Measure atmospheric pressure Measures the distance between phone and face Controls screen brightness If component gets overheated, system shuts down by itself Portrait or landscape orientation. Screen facing upwards or downward Determines how high the device is above sea level, which in turn results in improved GPS accuracy Deactivate display for saving power and prevent any unintentional inputs caused from touching face/ear to the screen.
43 KEY ELEMENTS OF MECHATRONICS The study of mechatronic systems can be divided into the following areas of specialty: 1. Physical Systems Modeling 2. Sensors and Actuators 3. Signals and Systems 4. Computers and Logic Systems 5. Software and Data Acquisition

44 KEY ELEMENTS OF MECHATRONICS
45 KEY ELEMENTS OF MECHATRONICS
46 KEY ELEMENTS OF MECHATRONICS Modeling is the process of representing the behavior of a real system by a collection of mathematical equations and logic. Models are collections of mathematical and logic expressions. Models can be either static or dynamic. Models are represented in block diagram.
47 KEY ELEMENTS OF MECHATRONICS Models accept external information and process it with their logic and equations to produce outputs. Externally produced information supplied to the model either can be fixed in value or changing. An external information is called an input signal. Model output information is assumed to be changing and is therefore referred to as output signals.
48 KEY ELEMENTS OF MECHATRONICS Block diagram consist of two fundamental objects: signal wires and blocks. Signal wire transmits a signal or a value from its point of origination to its point of termination. An arrowhead on the signal wire defines the direction in which the signal flows. Direction of flow is defined for a given signal wire. Signals may flow in forward or backward direction. A block gets input and produces output.
49 KEY ELEMENTS OF MECHATRONICS Simulation is the process of solving the model and is performed on a computer. Simulation process can be divided into three sections: initialization, iteration, and termination. Initialization sort equations for each blocks according to the pattern in which the blocks are connected. The iteration section solves any DE present in the model using NT and/or differentiation. Display section of a simulation is used to present the output. Reading, chart or animation.
50 KEY ELEMENTS OF MECHATRONICS Optimization Optimization solves the problem of distributing limited resources throughout a system so that pre-specified aspects of its behavior are satisfied. In mechatronics, optimization is primarily used to establish the optimal system configuration.

51 KEY ELEMENTS OF MECHATRONICS

52 KEY ELEMENTS OF MECHATRONICS

53 KEY ELEMENTS OF MECHATRONICS

54 KEY ELEMENTS OF MECHATRONICS

55 KEY ELEMENTS OF MECHATRONICS

56 KEY ELEMENTS OF MECHATRONICS
BASIC MECHATRONICS ENGINEERING
 MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY Lecture Summary on BASIC MECHATRONICS ENGINEERING NTA - 4 Mechatronics Engineering 2016 Page 1 INTRODUCTION TO MECHATRONICS Mechatronics is the field of study
MBEYA UNIVERSITY OF SCIENCE AND TECHNOLOGY Lecture Summary on BASIC MECHATRONICS ENGINEERING NTA - 4 Mechatronics Engineering 2016 Page 1 INTRODUCTION TO MECHATRONICS Mechatronics is the field of study
MECHATRONICS LAB MANUAL
 MECHATRONICS LAB MANUAL T.E.(Mechanical) Sem-VI Department of Mechanical Engineering SIESGST, Nerul, Navi Mumbai LIST OF EXPERIMENTS Expt. No. Title Page No. 1. Study of basic principles of sensing and
MECHATRONICS LAB MANUAL T.E.(Mechanical) Sem-VI Department of Mechanical Engineering SIESGST, Nerul, Navi Mumbai LIST OF EXPERIMENTS Expt. No. Title Page No. 1. Study of basic principles of sensing and
Objectives 1. Understand key elements of Mechatronics system, representation into block diagram 3. Understand principles of sensors
 Mr Manoj Rajale Objectives 1. Understand key elements of Mechatronics system, representation into block diagram 2. Understand concept of transfer function, reduction and analysis 3. Understand principles
Mr Manoj Rajale Objectives 1. Understand key elements of Mechatronics system, representation into block diagram 2. Understand concept of transfer function, reduction and analysis 3. Understand principles
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur
 Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture 04 Actuation So, this particular lecture is on actuation.
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture 04 Actuation So, this particular lecture is on actuation.
MECHATRONICS AND MICROPROCESSOR (10ME65)
") MECHATRONICS AND MICROPROCESSOR (10ME65) UNIT: 1 INTRODUCTION TO MECHATRONIC SYSTEMS CONTENTS Introduction Definition of Mechatronics Multi-disciplinary scenario. Origin of Mechatronic system. Evaluation
MECHATRONICS AND MICROPROCESSOR (10ME65) UNIT: 1 INTRODUCTION TO MECHATRONIC SYSTEMS CONTENTS Introduction Definition of Mechatronics Multi-disciplinary scenario. Origin of Mechatronic system. Evaluation
Building Blocks of Automation
 Building Blocks of Automation Manufacturing systems can generally be classified as fixed (hardware) or flexible (software). These classifications are normally bestowed on both the processing equipment
Building Blocks of Automation Manufacturing systems can generally be classified as fixed (hardware) or flexible (software). These classifications are normally bestowed on both the processing equipment
UTILIZATION OF PNEUMATIC ACTUATOR
 UTILIZATION OF PNEUMATIC ACTUATOR Rupesh Parkhi 1 UG Student, Department of Mech, G.H.Raisoni College of Engineering, Nagpur, RTMN University ABSTRACT The pneumatic actuator represents the main force control
UTILIZATION OF PNEUMATIC ACTUATOR Rupesh Parkhi 1 UG Student, Department of Mech, G.H.Raisoni College of Engineering, Nagpur, RTMN University ABSTRACT The pneumatic actuator represents the main force control
ME 475: Mechatronics. ME 475: Mechatronics. Mechatronics: Introduction. Mechatronics: Introduction
 ME 475: Mechatronics ME 475: Mechatronics 3.00 credit hours Course content Introduction: organisation structure; System concept; mechanical, electrical and software components; process; software based
ME 475: Mechatronics ME 475: Mechatronics 3.00 credit hours Course content Introduction: organisation structure; System concept; mechanical, electrical and software components; process; software based
Friday Midterm EXAMINATION Fall 2018 CREDIT HOURS ENGINEERING PROGRAMS AIN SHAMS UNIVERSITY FACULTY OF ENGINEERING
 HUM311 Engineering Management 176 HUMN362 Engineering Management 1 14:00 16:00 224, 261 CEP 011 Engineering Drawing (2) 247 14:00 16:00 901, 901A, 902A, 902B,904, 250 Friday 9-11-2018 PHM022 Waves, Electricity,
HUM311 Engineering Management 176 HUMN362 Engineering Management 1 14:00 16:00 224, 261 CEP 011 Engineering Drawing (2) 247 14:00 16:00 901, 901A, 902A, 902B,904, 250 Friday 9-11-2018 PHM022 Waves, Electricity,
Chapter01 - Control system types - Examples
 Chapter01 - Control system types - Examples Open loop control: An open-loop control system utilizes an actuating device to control the process directly without using feedback. A common example of an open-loop
Chapter01 - Control system types - Examples Open loop control: An open-loop control system utilizes an actuating device to control the process directly without using feedback. A common example of an open-loop
EMaSM. Principles Of Sensors & transducers
 EMaSM Principles Of Sensors & transducers Introduction: At the heart of measurement of common physical parameters such as force and pressure are sensors and transducers. These devices respond to the parameters
EMaSM Principles Of Sensors & transducers Introduction: At the heart of measurement of common physical parameters such as force and pressure are sensors and transducers. These devices respond to the parameters
Potentiometer. Incremental encoder. Tachogenerator. Hall effect sensor. Differential transformer. Piezoelectric sensor. Turbine meter.
 ELG411: Home Exam These questions should be answered briefly. You should always support your answer with figures or block diagram stating the operation of each part Based on the following applications,
ELG411: Home Exam These questions should be answered briefly. You should always support your answer with figures or block diagram stating the operation of each part Based on the following applications,
Festo Modular Production System (MPS)
") ELEC E8114 Manufacturing Automation Systems Modelling Festo Modular Production System (MPS) Figure 1 Distribution station (left) and testing station (right) 1 Introduction The purpose of this document
ELEC E8114 Manufacturing Automation Systems Modelling Festo Modular Production System (MPS) Figure 1 Distribution station (left) and testing station (right) 1 Introduction The purpose of this document
Electrohydraulics Basic Level Textbook TP 601
 Electrohydraulics Basic Level Textbook TP 601 Festo Didactic 093611 en Order No.: 093611 Edition: 03/2006 Authors: C. Löffler, D. Merkle, G. Prede, K. Rupp, D. Scholz Graphics: Doris Schwarzenberger Layout:
Electrohydraulics Basic Level Textbook TP 601 Festo Didactic 093611 en Order No.: 093611 Edition: 03/2006 Authors: C. Löffler, D. Merkle, G. Prede, K. Rupp, D. Scholz Graphics: Doris Schwarzenberger Layout:
Chapter 7: DC Motors and Transmissions. 7.1: Basic Definitions and Concepts
 Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
INTRODUCTION TO SENSORS, TRANSDUCERS & ACTUATORS
 INTRODUCTION Transducers play a major role in mechatronics engineering & technology. These are the basic elements that convert or transform one form of energy to another form. Let us change the word energy
INTRODUCTION Transducers play a major role in mechatronics engineering & technology. These are the basic elements that convert or transform one form of energy to another form. Let us change the word energy
Electric Machines I 2017 Shiraz University of Technology Dr. A. Rahideh
 In The Name of God The Most Compassionate, The Most Merciful Electric Machines I Table of Contents 1. Introduction to Electric Machines 2. Electromagnetic Circuits 3. Principle of Electromechanical Energy
In The Name of God The Most Compassionate, The Most Merciful Electric Machines I Table of Contents 1. Introduction to Electric Machines 2. Electromagnetic Circuits 3. Principle of Electromechanical Energy
Electrical Control System Components Basics of Magnetic Control :
 Electrical Control System Components Basics of Magnetic Control : Dr.M.S.Narkhede, LEE, GP Mumbai 1 Contact Types : Contacts are classified into different ways as follows. According to applications contacts
Electrical Control System Components Basics of Magnetic Control : Dr.M.S.Narkhede, LEE, GP Mumbai 1 Contact Types : Contacts are classified into different ways as follows. According to applications contacts
WINTER 15 EXAMINATION Subject Code: Model Answer Page No: 1 of 29
 Subject Code: 17660 Model Answer Page No: 1 of 29 Important Instructions to examiners: 1) The answers should be examined by key words and not as word-to-word as given in the Model answer scheme. 2) The
Subject Code: 17660 Model Answer Page No: 1 of 29 Important Instructions to examiners: 1) The answers should be examined by key words and not as word-to-word as given in the Model answer scheme. 2) The
SARDAR RAJA COLLEGE OF ENGINEERING, ALANGULAM
 SARDAR RAJA COLLEGE OF ENGINEERING, ALANGULAM DEPARTMENT OF MECHANICAL ENGINEERING MICRO LESSON PLAN SUBJECT : MECHATRONICS CODE : ME 71 CLASS : IV Year / VII SEM DEPT. OF MECHANICAL ENGG. ME71 MECHATRONICS
SARDAR RAJA COLLEGE OF ENGINEERING, ALANGULAM DEPARTMENT OF MECHANICAL ENGINEERING MICRO LESSON PLAN SUBJECT : MECHATRONICS CODE : ME 71 CLASS : IV Year / VII SEM DEPT. OF MECHANICAL ENGG. ME71 MECHATRONICS
DEPARTMENT OF MECHANICAL- IV YEAR ME-2401 MECHATRONICS QUESTION BANK. 1.Define mechatronics and sketch the graphical representation of mechatronics?
 DEPARTMENT OF MECHANICAL- IV YEAR ME-2401 MECHATRONICS QUESTION BANK UNIT-1 MECHATRONICS,SENSORS AND TRANSDUCERS TWO(2) MARKS 1.Define mechatronics and sketch the graphical representation of mechatronics?
DEPARTMENT OF MECHANICAL- IV YEAR ME-2401 MECHATRONICS QUESTION BANK UNIT-1 MECHATRONICS,SENSORS AND TRANSDUCERS TWO(2) MARKS 1.Define mechatronics and sketch the graphical representation of mechatronics?
FALL SEMESTER MECE 407 INNOVATIVE ENGINEERING ANALYSIS AND DESIGN PROJECT TOPICS
 2016-2017 FALL SEMESTER MECE 407 INNOVATIVE ENGINEERING ANALYSIS AND DESIGN PROJECT TOPICS 1- Design, construction and control of a cart-inverted pendulum control system: - There will be a cart and an
2016-2017 FALL SEMESTER MECE 407 INNOVATIVE ENGINEERING ANALYSIS AND DESIGN PROJECT TOPICS 1- Design, construction and control of a cart-inverted pendulum control system: - There will be a cart and an
Clement A. Skalski, Ph.D., P.E.
 page 1 of 5 skalskic@comcast.net 860-673-7909 (Connecticut) 941-375-2975 (Florida) 860-402-8149 (cell) EXPERTISE! Elevators! Control Systems, Transducers, and Actuators.! Induction and PM Synchronous Motors,
page 1 of 5 skalskic@comcast.net 860-673-7909 (Connecticut) 941-375-2975 (Florida) 860-402-8149 (cell) EXPERTISE! Elevators! Control Systems, Transducers, and Actuators.! Induction and PM Synchronous Motors,
3. DESCRIPTION OF SHAKING TABLE SYSTEM COMPONENTS
 17 3. DESCRIPTION OF SHAKING TABLE SYSTEM COMPONENTS 3.1. INTRODUCTION The earthquake simulator is a system that consists of several components which must be designed to effectively work together. Each
17 3. DESCRIPTION OF SHAKING TABLE SYSTEM COMPONENTS 3.1. INTRODUCTION The earthquake simulator is a system that consists of several components which must be designed to effectively work together. Each
ELECTROPNEUMATIC POSITIONING SYSTEM CONTROL WITH THE LEGENDARY LOGO! PLC
 ELECTROPNEUMATIC POSITIONING SYSTEM CONTROL WITH THE LEGENDARY LOGO! PLC G. Kozoris Dept. of Automation Engineering, PUAS, Athens, Greece M. Papoutsidakis Dept. of Automation Engineering, PUAS, Athens,
ELECTROPNEUMATIC POSITIONING SYSTEM CONTROL WITH THE LEGENDARY LOGO! PLC G. Kozoris Dept. of Automation Engineering, PUAS, Athens, Greece M. Papoutsidakis Dept. of Automation Engineering, PUAS, Athens,
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
(FPGA) based design for minimizing petrol spill from the pipe lines during sabotage
 based design for minimizing petrol spill from the pipe lines during sabotage") IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 05, Issue 01 (January. 2015), V3 PP 26-30 www.iosrjen.org (FPGA) based design for minimizing petrol spill from the pipe
IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 05, Issue 01 (January. 2015), V3 PP 26-30 www.iosrjen.org (FPGA) based design for minimizing petrol spill from the pipe
Ch 4 Motor Control Devices
 Ch 4 Motor Control Devices Part 1 Manually Operated Switches 1. List three examples of primary motor control devices. (P 66) Answer: Motor contactor, starter, and controller or anything that control the
Ch 4 Motor Control Devices Part 1 Manually Operated Switches 1. List three examples of primary motor control devices. (P 66) Answer: Motor contactor, starter, and controller or anything that control the
Learning System for Automation and Communications. Electropneumatics. Workbook Basic Level S1 K1 K1 Y1
 Learning System for Automation and Communications Electropneumatics Workbook Basic Level 1 2 3 S1 K1 K1 S2 K1 094005 Order no. 094005 Description: TEACHW.E-PNEUM. Designation: D.S201-C-GB Edition: 08/1993
Learning System for Automation and Communications Electropneumatics Workbook Basic Level 1 2 3 S1 K1 K1 S2 K1 094005 Order no. 094005 Description: TEACHW.E-PNEUM. Designation: D.S201-C-GB Edition: 08/1993
EMaSM. Outcome 1 Mechanical Measurement
 EMaSM Outcome 1 Mechanical Measurement Some types of mechanical measurement can be awkward. Some require physical modification to the system under measurement. One example is the measurement of pneumatic
EMaSM Outcome 1 Mechanical Measurement Some types of mechanical measurement can be awkward. Some require physical modification to the system under measurement. One example is the measurement of pneumatic
Inverted Pendulum Control: an Overview
 Inverted Pendulum Control: an Overview K. Perev Key Words: Cart pendulum system; inverted pendulum; swing up control; local stabilization. Abstract. This paper considers the problem of inverted pendulum
Inverted Pendulum Control: an Overview K. Perev Key Words: Cart pendulum system; inverted pendulum; swing up control; local stabilization. Abstract. This paper considers the problem of inverted pendulum
CURRICULUM BOSCH-REXROTH (CENTRE OF EXCELLENCE) GANPAT UNIVERSITY
 GANPAT UNIVERSITY") ANNEXURE - A CURRICULUM BOSCH-REXROTH (CENTRE OF EXCELLENCE) Host Institute: GANPAT UNIVERSITY Contents of Basic Industrial Pneumatics -----------------------------------------------------------------------------------------------------------------
ANNEXURE - A CURRICULUM BOSCH-REXROTH (CENTRE OF EXCELLENCE) Host Institute: GANPAT UNIVERSITY Contents of Basic Industrial Pneumatics -----------------------------------------------------------------------------------------------------------------
MOTOR TERMINAL CONNECTIONS
 MOTOR TERMINAL CONNECTIONS Motor Classification Most of the industrial machines in use today are driven by electric motors Motors are classified according to the type of power used (AC or DC) and the motors
MOTOR TERMINAL CONNECTIONS Motor Classification Most of the industrial machines in use today are driven by electric motors Motors are classified according to the type of power used (AC or DC) and the motors
Farr High School NATIONAL 4 PHYSICS. Unit 1 Electricity and Energy. Revision Notes
 Farr High School NATIONAL 4 PHYSICS Unit 1 Electricity and Energy Revision Notes Content Practical electrical and electronic circuits - Measurement of current, voltage and resistance using appropriate
Farr High School NATIONAL 4 PHYSICS Unit 1 Electricity and Energy Revision Notes Content Practical electrical and electronic circuits - Measurement of current, voltage and resistance using appropriate
Mechatronics Design Workshop. Thomas Villgrattner Institute of Applied Mechanics Technische Universität München
 Mechatronics Design Workshop Thomas Villgrattner Institute of Applied Mechanics Technische Universität München thomas.villgrattner@mytum.de Definition Mechatronics Mechanical Engineering [Mechatronics
Mechatronics Design Workshop Thomas Villgrattner Institute of Applied Mechanics Technische Universität München thomas.villgrattner@mytum.de Definition Mechatronics Mechanical Engineering [Mechatronics
TECHNICAL PAPER 1002 FT. WORTH, TEXAS REPORT X ORDER
 I. REFERENCE: 1 30 [1] Snow Engineering Co. Drawing 80504 Sheet 21, Hydraulic Schematic [2] Snow Engineering Co. Drawing 60445, Sheet 21 Control Logic Flow Chart [3] Snow Engineering Co. Drawing 80577,
I. REFERENCE: 1 30 [1] Snow Engineering Co. Drawing 80504 Sheet 21, Hydraulic Schematic [2] Snow Engineering Co. Drawing 60445, Sheet 21 Control Logic Flow Chart [3] Snow Engineering Co. Drawing 80577,
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Electropneumatics Basic Level Set of Overhead Transparencies TP 201
 Electropneumatics Basic Level Set of Overhead Transparencies TP 0 Festo Didactic 0950 en Order No.: 0950 Description: EL-PN.FOLIEN-GS Designation: D:OT-TP0-GB Edition: 0/000 Author: Frank Ebel Graphics:
Electropneumatics Basic Level Set of Overhead Transparencies TP 0 Festo Didactic 0950 en Order No.: 0950 Description: EL-PN.FOLIEN-GS Designation: D:OT-TP0-GB Edition: 0/000 Author: Frank Ebel Graphics:
LECTURE-23: Basic concept of Hydro-Static Transmission (HST) Systems
 Systems") MODULE-6 : HYDROSTATIC TRANSMISSION SYSTEMS LECTURE-23: Basic concept of Hydro-Static Transmission (HST) Systems 1. INTRODUCTION The need for large power transmissions in tight space and their control
MODULE-6 : HYDROSTATIC TRANSMISSION SYSTEMS LECTURE-23: Basic concept of Hydro-Static Transmission (HST) Systems 1. INTRODUCTION The need for large power transmissions in tight space and their control
: INDUSTRIAL AUTOMATION & MECHATRONICS COURSE CODE : 6025 COURSE CATEGORY : E PERIODS/WEEK : 5 PERIODS/SEMESTER : 75 CREDITS : 5
 COURSE TITLE : INDUSTRIAL AUTOMATION & MECHATRONICS COURSE CODE : 6025 COURSE CATEGORY : E PERIODS/WEEK : 5 PERIODS/SEMESTER : 75 CREDITS : 5 TIME SCHEDULE Module Topic Periods 1 Industrial Automation
COURSE TITLE : INDUSTRIAL AUTOMATION & MECHATRONICS COURSE CODE : 6025 COURSE CATEGORY : E PERIODS/WEEK : 5 PERIODS/SEMESTER : 75 CREDITS : 5 TIME SCHEDULE Module Topic Periods 1 Industrial Automation
Power Electronics and Drives (PED)
") Power Electronics and Drives (PED) Introduction Spurred on by technological progress and a steadily increasing concern about the efficient use of depleting energy resources, static power electronic converters
Power Electronics and Drives (PED) Introduction Spurred on by technological progress and a steadily increasing concern about the efficient use of depleting energy resources, static power electronic converters
Design and Modeling of Fluid Power Systems ME 597/ABE 591
 Systems ME 597/ABE 591 Dr. Monika Ivantysynova MAHA Professor Flud Power Systems MAHA Fluid Power Research Center Purdue University Systems Dr. Monika Ivantysynova, Maha Professor Fluid Power Systems Mivantys@purdue.edu
Systems ME 597/ABE 591 Dr. Monika Ivantysynova MAHA Professor Flud Power Systems MAHA Fluid Power Research Center Purdue University Systems Dr. Monika Ivantysynova, Maha Professor Fluid Power Systems Mivantys@purdue.edu
three different ways, so it is important to be aware of how flow is to be specified
 Flow-control valves Flow-control valves include simple s to sophisticated closed-loop electrohydraulic valves that automatically adjust to variations in pressure and temperature. The purpose of flow control
Flow-control valves Flow-control valves include simple s to sophisticated closed-loop electrohydraulic valves that automatically adjust to variations in pressure and temperature. The purpose of flow control
Highly dynamic control of a test bench for highspeed train pantographs
 PAGE 26 CUSTOMERS Highly dynamic control of a test bench for highspeed train pantographs Keeping Contact at 300 km/h Electric rail vehicles must never lose contact with the power supply, not even at the
PAGE 26 CUSTOMERS Highly dynamic control of a test bench for highspeed train pantographs Keeping Contact at 300 km/h Electric rail vehicles must never lose contact with the power supply, not even at the
Understanding the benefits of using a digital valve controller. Mark Buzzell Business Manager, Metso Flow Control
 Understanding the benefits of using a digital valve controller Mark Buzzell Business Manager, Metso Flow Control Evolution of Valve Positioners Digital (Next Generation) Digital (First Generation) Analog
Understanding the benefits of using a digital valve controller Mark Buzzell Business Manager, Metso Flow Control Evolution of Valve Positioners Digital (Next Generation) Digital (First Generation) Analog
Fluid Power System Model-Based Design. Energy Efficiency. Fluid Power System Model-Based Design Energy Efficiency. K. Craig 1
 Fluid Power System Model-Based Design Energy Efficiency K. Craig 1 Energy in Fluid Power Systems Fluid Power Systems have many advantages: High Power Density Responsiveness and Bandwidth of Operation High
Fluid Power System Model-Based Design Energy Efficiency K. Craig 1 Energy in Fluid Power Systems Fluid Power Systems have many advantages: High Power Density Responsiveness and Bandwidth of Operation High
World Academy of Science, Engineering and Technology International Journal of Mechanical and Mechatronics Engineering Vol:11, No:3, 2017
 Multipurpose Agricultural Robot Platform: Conceptual Design of Control System Software for Autonomous Driving and Agricultural Operations Using Programmable Logic Controller P. Abhishesh, B. S. Ryuh, Y.
Multipurpose Agricultural Robot Platform: Conceptual Design of Control System Software for Autonomous Driving and Agricultural Operations Using Programmable Logic Controller P. Abhishesh, B. S. Ryuh, Y.
Application Note Original Instructions Development of Gas Fuel Control Systems for Dry Low NOx (DLN) Aero-Derivative Gas Turbines
 Aero-Derivative Gas Turbines") Application Note 83404 Original Instructions Development of Gas Fuel Control Systems for Dry Low NOx (DLN) Aero-Derivative Gas Turbines Woodward reserves the right to update any portion of this publication
Application Note 83404 Original Instructions Development of Gas Fuel Control Systems for Dry Low NOx (DLN) Aero-Derivative Gas Turbines Woodward reserves the right to update any portion of this publication
The Systems Approach to Mechatronics Education
 The Systems Approach to Mechatronics Education Marilyn Barger, FLATE (Florida Advanced Technological Education Center of Excellence) Dan Horine, Virginia Western Community College Protection notice / Copyright
The Systems Approach to Mechatronics Education Marilyn Barger, FLATE (Florida Advanced Technological Education Center of Excellence) Dan Horine, Virginia Western Community College Protection notice / Copyright
Autonomous inverted helicopter flight via reinforcement learning
 Autonomous inverted helicopter flight via reinforcement learning Andrew Y. Ng, Adam Coates, Mark Diel, Varun Ganapathi, Jamie Schulte, Ben Tse, Eric Berger, and Eric Liang By Varun Grover Outline! Helicopter
Autonomous inverted helicopter flight via reinforcement learning Andrew Y. Ng, Adam Coates, Mark Diel, Varun Ganapathi, Jamie Schulte, Ben Tse, Eric Berger, and Eric Liang By Varun Grover Outline! Helicopter
STUDENT APPLICATION CHECKLIST
 DIPLOMA OF ENGINEERING TECHNOLOGY IN AEROPLANE MAINTENANCE Module 1 AQD10102 Technical Mathematics 1 Module 2 AJD 10103 Physics & Aerodynamics AKD 10203 Electrical Fundamentals 2 Module 4 AKD 20102 Electronic
DIPLOMA OF ENGINEERING TECHNOLOGY IN AEROPLANE MAINTENANCE Module 1 AQD10102 Technical Mathematics 1 Module 2 AJD 10103 Physics & Aerodynamics AKD 10203 Electrical Fundamentals 2 Module 4 AKD 20102 Electronic
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
EE069: Electrical Engineering for Non-Electrical Engineers
 EE069: Electrical Engineering for Non-Electrical Engineers EE069 Rev.002 CMCT COURSE OUTLINE Page 1 of 5 Training Description: This course introduces the Basic Principles of Electricity in a simple, easy
EE069: Electrical Engineering for Non-Electrical Engineers EE069 Rev.002 CMCT COURSE OUTLINE Page 1 of 5 Training Description: This course introduces the Basic Principles of Electricity in a simple, easy
Development of the automatic machine for tube end forming
 Development of the automatic machine for tube end forming Matjaž Sotler, machine manufacturing TPV d.d. ABSTRACT In this article I tried to demonstrate how company TPV d.d. progresses from stage of demand
Development of the automatic machine for tube end forming Matjaž Sotler, machine manufacturing TPV d.d. ABSTRACT In this article I tried to demonstrate how company TPV d.d. progresses from stage of demand
Dealing with customer concerns related to electronic throttle bodies By: Bernie Thompson
 Dealing with customer concerns related to electronic throttle bodies By: Bernie Thompson In order to regulate the power produced from the gasoline internal combustion engine (ICE), a restriction is used
Dealing with customer concerns related to electronic throttle bodies By: Bernie Thompson In order to regulate the power produced from the gasoline internal combustion engine (ICE), a restriction is used
The linear motor technology for industrial applications
 Industrial Linear Motors Purely electrical drive system Freely positionable along the entire stroke For precise and dynamic positioning tasks Direct drive technology provides longer life Clean room certification
Industrial Linear Motors Purely electrical drive system Freely positionable along the entire stroke For precise and dynamic positioning tasks Direct drive technology provides longer life Clean room certification
PNEUMATIC BIKES ABSTRACT
 PNEUMATIC BIKES ABSTRACT The fact that you pick up this paper shows that there is something common among all! [f you have your own a two wheeler; if you are spending more money in your petrol; if you feel
PNEUMATIC BIKES ABSTRACT The fact that you pick up this paper shows that there is something common among all! [f you have your own a two wheeler; if you are spending more money in your petrol; if you feel
OF THE FUTURE-THE PNEUMATIC BIKE ECO FRIENDLY
 ABSTRACT The fact that you pick up this paper shows that there is something common among all! [f you have your own a two wheeler; if you are spending more money in your petrol; if you feel drive in a polluted
ABSTRACT The fact that you pick up this paper shows that there is something common among all! [f you have your own a two wheeler; if you are spending more money in your petrol; if you feel drive in a polluted
MANTECH ELECTRONICS. Stepper Motors. Basics on Stepper Motors I. STEPPER MOTOR SYSTEMS OVERVIEW 2. STEPPING MOTORS
 MANTECH ELECTRONICS Stepper Motors Basics on Stepper Motors I. STEPPER MOTOR SYSTEMS OVERVIEW 2. STEPPING MOTORS TYPES OF STEPPING MOTORS 1. VARIABLE RELUCTANCE 2. PERMANENT MAGNET 3. HYBRID MOTOR WINDINGS
MANTECH ELECTRONICS Stepper Motors Basics on Stepper Motors I. STEPPER MOTOR SYSTEMS OVERVIEW 2. STEPPING MOTORS TYPES OF STEPPING MOTORS 1. VARIABLE RELUCTANCE 2. PERMANENT MAGNET 3. HYBRID MOTOR WINDINGS
White paper: Originally published in ISA InTech Magazine Page 1
 Page 1 Improving Differential Pressure Diaphragm Seal System Performance and Installed Cost Tuned-Systems ; Deliver the Best Practice Diaphragm Seal Installation To Compensate Errors Caused by Temperature
Page 1 Improving Differential Pressure Diaphragm Seal System Performance and Installed Cost Tuned-Systems ; Deliver the Best Practice Diaphragm Seal Installation To Compensate Errors Caused by Temperature
DEPARTMENT OF AUTOMOBILE ENGINEERING CURRICULUM. B. Tech. AUTOMOBILE ENGINEERING. In Specialization with MOTORSPORT ENGINEERING
 DEPARTMENT OF AUTOMOBILE ENGINEERING CURRICULUM (Applicable for Students admitted from Academic Year 2015-16) B. Tech. AUTOMOBILE ENGINEERING In Specialization with MOTORSPORT ENGINEERING SCHOOL OF MECHANICAL
DEPARTMENT OF AUTOMOBILE ENGINEERING CURRICULUM (Applicable for Students admitted from Academic Year 2015-16) B. Tech. AUTOMOBILE ENGINEERING In Specialization with MOTORSPORT ENGINEERING SCHOOL OF MECHANICAL
Design of pneumatic proportional flow valve type 5/3
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Design of pneumatic proportional flow valve type 5/3 To cite this article: P A Laski et al 2017 IOP Conf. Ser.: Mater. Sci. Eng.
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Design of pneumatic proportional flow valve type 5/3 To cite this article: P A Laski et al 2017 IOP Conf. Ser.: Mater. Sci. Eng.
KCTCS AAS IN ENGINEERING AND ELECTRONICS TECHNOLOGY ROBOTICS AND AUTOMATION TRACK TO NKU BS IN MECHATRONICS ENGINEERING TECHNOLOGY CHECKLIST
 Associate of Applied Science in Engineering and Electronics Technology Robotics and Automation Track To Bachelor of Science in Mechatronics Engineering Technology Completion of the following curriculum
Associate of Applied Science in Engineering and Electronics Technology Robotics and Automation Track To Bachelor of Science in Mechatronics Engineering Technology Completion of the following curriculum
INDEXING MODULE FOR ACCURATE PNEUMATIC ACTUATING
 INDEXING MODULE FOR ACCURATE PNEUMATIC ACTUATING Mihai Avram, Constantin Bucsan, Victor Constantin, Costinel Florin Negrila "Politehnica" University of Bucharest 313 Spl. Independentei, Bucharest, Romania
INDEXING MODULE FOR ACCURATE PNEUMATIC ACTUATING Mihai Avram, Constantin Bucsan, Victor Constantin, Costinel Florin Negrila "Politehnica" University of Bucharest 313 Spl. Independentei, Bucharest, Romania
Step Motor. Mechatronics Device Report Yisheng Zhang 04/02/03. What Is A Step Motor?
 Step Motor What is a Step Motor? How Do They Work? Basic Types: Variable Reluctance, Permanent Magnet, Hybrid Where Are They Used? How Are They Controlled? How To Select A Step Motor and Driver Types of
Step Motor What is a Step Motor? How Do They Work? Basic Types: Variable Reluctance, Permanent Magnet, Hybrid Where Are They Used? How Are They Controlled? How To Select A Step Motor and Driver Types of
Multibody Dynamics Simulations with Abaqus from SIMULIA
 Multibody Dynamics Simulations with Abaqus from SIMULIA 8.5.2008 Martin Kuessner Martin.KUESSNER@3ds.com Abaqus Deutschland GmbH 2 One Company, First Class Brands 3D MCAD Virtual Product Virtual Testing
Multibody Dynamics Simulations with Abaqus from SIMULIA 8.5.2008 Martin Kuessner Martin.KUESSNER@3ds.com Abaqus Deutschland GmbH 2 One Company, First Class Brands 3D MCAD Virtual Product Virtual Testing
Control unit for valves with inflatable sealing system
 Control unit for valves with inflatable sealing system Type ICS A model from the system -vacotrol Shut-off valves are used in transport equipment for bulk powder and granulate, whose shut-off mechanism
Control unit for valves with inflatable sealing system Type ICS A model from the system -vacotrol Shut-off valves are used in transport equipment for bulk powder and granulate, whose shut-off mechanism
LMS Imagine.Lab AMESim Ground Loads and Flight Controls
 LMS Imagine.Lab AMESim Ground Loads and Flight Controls LMS Imagine.Lab Ground Loads and Flight Controls LMS Imagine.Lab Ground Loads and Flight Controls helps designers from the aerospace industry to
LMS Imagine.Lab AMESim Ground Loads and Flight Controls LMS Imagine.Lab Ground Loads and Flight Controls LMS Imagine.Lab Ground Loads and Flight Controls helps designers from the aerospace industry to
1. INTRODUCTION. Anti-lock Braking System
 1. INTRODUCTION Car manufacturers world wide are vying with each other to invent more reliable gadgets there by coming closer to the dream of the Advanced safety vehicle or Ultimate safety vehicle, on
1. INTRODUCTION Car manufacturers world wide are vying with each other to invent more reliable gadgets there by coming closer to the dream of the Advanced safety vehicle or Ultimate safety vehicle, on
EXPERIMENT 5 (a) PRESSURE, PROXIMITY AND MAGNETIC FIELD SENSORS
 PRESSURE, PROXIMITY AND MAGNETIC FIELD SENSORS") EXPERIMENT 5 (a) PRESSURE, PROXIMITY AND MAGNETIC FIELD SENSORS 1. OBJECTIVES: 1.1 To study the characteristics of a semiconductor type pressure sensor and an electronic pressure switch circuit 1.2 To
EXPERIMENT 5 (a) PRESSURE, PROXIMITY AND MAGNETIC FIELD SENSORS 1. OBJECTIVES: 1.1 To study the characteristics of a semiconductor type pressure sensor and an electronic pressure switch circuit 1.2 To
Basic Pneumatics. Module 1: Introduction to Pneumatics. Academic Services PREPARED BY. August 2011
 Basic Pneumatics PREPARED BY Academic Services August 2011 Applied Technology High Schools, 2011 Module Objectives After the completion of this module, the student will be able to: Identify the common
Basic Pneumatics PREPARED BY Academic Services August 2011 Applied Technology High Schools, 2011 Module Objectives After the completion of this module, the student will be able to: Identify the common
Mechanisms. Prepared by Juan Blázquez, Alissa Gildemann
 Unit 9 Mechanisms 1. Mechanisms Mechanisms are devices that transmit and convert forces and motions from an input to an output element. They enable us to use less effort to carry out a task. We can classify
Unit 9 Mechanisms 1. Mechanisms Mechanisms are devices that transmit and convert forces and motions from an input to an output element. They enable us to use less effort to carry out a task. We can classify
Schedule of Events. Mech 1751: Introduction to Mechatronics. What is an actuator? Electric Actuators and Drives. Actuators. Dr. Stefan B.
 Schedule of Events Week Date Content Assignment Notes Mech 1751: Introduction to Mechatronics Actuators 1 2 3 4 5 6 7 8 9 09/3 16/3 23/3 30/3 6/4 20/4 27/4 4/5 11/5 Introduction Design Process System Modelling
Schedule of Events Week Date Content Assignment Notes Mech 1751: Introduction to Mechatronics Actuators 1 2 3 4 5 6 7 8 9 09/3 16/3 23/3 30/3 6/4 20/4 27/4 4/5 11/5 Introduction Design Process System Modelling
Comparing FEM Transfer Matrix Simulated Compressor Plenum Pressure Pulsations to Measured Pressure Pulsations and to CFD Results
 Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 2012 Comparing FEM Transfer Matrix Simulated Compressor Plenum Pressure Pulsations to Measured
Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 2012 Comparing FEM Transfer Matrix Simulated Compressor Plenum Pressure Pulsations to Measured
MECHANISM: TRANSMISSION THE TYPE OF INPUT MOVEMENT IS THE SAME AS THE OUTPUT TRANSFORMATION THE MECHANISM TRANSFORMS THE TYPE OF MOVEMENT
 MECHANISM: The mechanisms are elements intended to transmit and transform forces and movements from an INPUT element (motor) to an OUTPUT element. Types of movements: Rotary Motion -this is motion in a
MECHANISM: The mechanisms are elements intended to transmit and transform forces and movements from an INPUT element (motor) to an OUTPUT element. Types of movements: Rotary Motion -this is motion in a
FRL unit consist of Filterations, Regulators and Lubricator unit.
 4.1 AIR CONTROL 4.1.1 Fluid Conditioner FRL unit consist of Filterations, Regulators and Lubricator unit. It is also known as Air Service Unit. Primary function is to provide clean air at optimal pressure
4.1 AIR CONTROL 4.1.1 Fluid Conditioner FRL unit consist of Filterations, Regulators and Lubricator unit. It is also known as Air Service Unit. Primary function is to provide clean air at optimal pressure
Unit 1 Introduction to VEX and Robotics
 Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
DEVELOPMENT OF ELECTRONICALLY CONTROLLED PROPORTIONING DIRECTIONAL SERVO VALVES PROJECT REFERENCE NO.: 38S1453
 DEVELOPMENT OF ELECTRONICALLY CONTROLLED PROPORTIONING DIRECTIONAL SERVO VALVES COLLEGE BRANCH GUIDE PROJECT REFERENCE NO.: 38S1453 : BAPUJI INSTITUTE OF ENGINEERING AND TECHNOLOGY, DAVANGERE : MECHANICAL
DEVELOPMENT OF ELECTRONICALLY CONTROLLED PROPORTIONING DIRECTIONAL SERVO VALVES COLLEGE BRANCH GUIDE PROJECT REFERENCE NO.: 38S1453 : BAPUJI INSTITUTE OF ENGINEERING AND TECHNOLOGY, DAVANGERE : MECHANICAL
Development of Feedforward Anti-Sway Control for Highly efficient and Safety Crane Operation
 7 Development of Feedforward Anti-Sway Control for Highly efficient and Safety Crane Operation Noriaki Miyata* Tetsuji Ukita* Masaki Nishioka* Tadaaki Monzen* Takashi Toyohara* Container handling at harbor
7 Development of Feedforward Anti-Sway Control for Highly efficient and Safety Crane Operation Noriaki Miyata* Tetsuji Ukita* Masaki Nishioka* Tadaaki Monzen* Takashi Toyohara* Container handling at harbor
Preliminary Study on Quantitative Analysis of Steering System Using Hardware-in-the-Loop (HIL) Simulator
 Simulator") TECHNICAL PAPER Preliminary Study on Quantitative Analysis of Steering System Using Hardware-in-the-Loop (HIL) Simulator M. SEGAWA M. HIGASHI One of the objectives in developing simulation methods is to
TECHNICAL PAPER Preliminary Study on Quantitative Analysis of Steering System Using Hardware-in-the-Loop (HIL) Simulator M. SEGAWA M. HIGASHI One of the objectives in developing simulation methods is to
Pneumatic Trainer Kit
 Pneumatic Trainer Kit Prof. N.R. Pawar, Nilesh Bhalerao, JitendraSingh Chouhan, Neha Muley, Ujwala Kamble Department of Mechanical Engineering, D.Y.Patil College of Engineering, Akurdi, Pune India. Keywords:-
Pneumatic Trainer Kit Prof. N.R. Pawar, Nilesh Bhalerao, JitendraSingh Chouhan, Neha Muley, Ujwala Kamble Department of Mechanical Engineering, D.Y.Patil College of Engineering, Akurdi, Pune India. Keywords:-
Innovative Testing Equipment. Torque sensors Vehicle Applications Actuators
 Innovative Testing Equipment Torque sensors Vehicle Applications Actuators Custom-made measuring solutions As a leading drivetrain testing company, ATESTEO specialises in drivetrain and transmission testing
Innovative Testing Equipment Torque sensors Vehicle Applications Actuators Custom-made measuring solutions As a leading drivetrain testing company, ATESTEO specialises in drivetrain and transmission testing
Our Businesses. Environment. Safety. Advanced Vehicle Control Systems
 Product Guide By delivering our products and system solutions throughout the world, we can realize an affluent society by creating new value for people, vehicles and society. Our Businesses Environment
Product Guide By delivering our products and system solutions throughout the world, we can realize an affluent society by creating new value for people, vehicles and society. Our Businesses Environment
FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT
 FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT Antti MAKELA, Jouni MATTILA, Mikko SIUKO, Matti VILENIUS Institute of Hydraulics and Automation, Tampere University of Technology P.O.Box
FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT Antti MAKELA, Jouni MATTILA, Mikko SIUKO, Matti VILENIUS Institute of Hydraulics and Automation, Tampere University of Technology P.O.Box
A robot is a programmable mechanical device that can perform tasks and interact with its environment, without the aid of human interaction
 Welcome to... T H E A robot is a programmable mechanical device that can perform tasks and interact with its environment, without the aid of human interaction 1. How to Plan The Design Process Create
Welcome to... T H E A robot is a programmable mechanical device that can perform tasks and interact with its environment, without the aid of human interaction 1. How to Plan The Design Process Create
Contents. Pressure measurement technology Pressure calibrators 18 Exercises 19-20
 1 Pressure Contents Topics: Slide No: Pressure measurement technology 03-17 Pressure calibrators 18 Exercises 19-20 2 Pressure Gauges Barometer Used to measure Barometric Pressure Reference is 0 psia,
1 Pressure Contents Topics: Slide No: Pressure measurement technology 03-17 Pressure calibrators 18 Exercises 19-20 2 Pressure Gauges Barometer Used to measure Barometric Pressure Reference is 0 psia,
1.1 Block Diagram of Drive Components of Electric Drive & their functions. Power Processor / Modulator. Control. Unit
 Introduction Motion control is required in large number of industrial and domestic applications like transportations, rolling mills, textile machines, fans, paper machines, pumps, washing machines, robots
Introduction Motion control is required in large number of industrial and domestic applications like transportations, rolling mills, textile machines, fans, paper machines, pumps, washing machines, robots
CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES
 CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES Upon completion of this chapter, you should be able to do the following: Compare the types of gears and their advantages. Did you ever take a clock apart to
CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES Upon completion of this chapter, you should be able to do the following: Compare the types of gears and their advantages. Did you ever take a clock apart to
Fluid Power Systems: Hydraulics and Pneumatics
 Fluid Power Systems: Hydraulics and Pneumatics Why Attend Fluid power systems (hydraulics and pneumatics) offer an alternate means of controlling industrial systems without a large number of electrical
Fluid Power Systems: Hydraulics and Pneumatics Why Attend Fluid power systems (hydraulics and pneumatics) offer an alternate means of controlling industrial systems without a large number of electrical
Chapter B-6. Chapter 6. Systems. Festo Didactic TP101
 223 Chapter 6 Systems Festo Didactic TP101 224 6.1 Selection and comparison of working and control media To select the working and control media consideration must be given to the following:! The work
223 Chapter 6 Systems Festo Didactic TP101 224 6.1 Selection and comparison of working and control media To select the working and control media consideration must be given to the following:! The work
Beyond Standard. Dynamic Wheel Endurance Tester. Caster Concepts, Inc. Introduction: General Capabilities: Written By: Dr.
 Dynamic Wheel Endurance Tester Caster Concepts, Inc. Written By: Dr. Elmer Lee Introduction: This paper details the functionality and specifications of the Dynamic Wheel Endurance Tester (DWET) developed
Dynamic Wheel Endurance Tester Caster Concepts, Inc. Written By: Dr. Elmer Lee Introduction: This paper details the functionality and specifications of the Dynamic Wheel Endurance Tester (DWET) developed
Servo Creel Development
 Servo Creel Development Owen Lu Electroimpact Inc. owenl@electroimpact.com Abstract This document summarizes the overall process of developing the servo tension control system (STCS) on the new generation
Servo Creel Development Owen Lu Electroimpact Inc. owenl@electroimpact.com Abstract This document summarizes the overall process of developing the servo tension control system (STCS) on the new generation
A SIMPLIFIED METHOD FOR ENERGIZING THE SOLENOID COIL BASED ON ELECTROMAGNETIC RELAYS
 A SIMPLIFIED METHOD FOR ENERGIZING THE SOLENOID COIL BASED ON ELECTROMAGNETIC RELAYS Munaf Fathi Badr Mechanical Engineering Department, College of Engineering Mustansiriyah University, Baghdad, Iraq E-Mail:
A SIMPLIFIED METHOD FOR ENERGIZING THE SOLENOID COIL BASED ON ELECTROMAGNETIC RELAYS Munaf Fathi Badr Mechanical Engineering Department, College of Engineering Mustansiriyah University, Baghdad, Iraq E-Mail:
IT 318 SUPPLEMENTARY MATERIAL CHAPTER 4
 IT 318 SUPPLEMENTARY MATERIAL CHAPTER 4 Electric Motors V. 2013 BARRY M. LUNT Brigham Young University Table of Contents Chapter 4: Electric Motors... 2 Overview... 2 4-1 Commutation... 2 4-2 Stepper Motors...
IT 318 SUPPLEMENTARY MATERIAL CHAPTER 4 Electric Motors V. 2013 BARRY M. LUNT Brigham Young University Table of Contents Chapter 4: Electric Motors... 2 Overview... 2 4-1 Commutation... 2 4-2 Stepper Motors...
Universal Fluid Power Trainer (UFPT)
") Universal Fluid Power Trainer (UFPT) Milwaukee School of Engineering Applied Technology Center TM Department of Professional Education The UFPT is a modular, smart and unique fluid power and motion control
Universal Fluid Power Trainer (UFPT) Milwaukee School of Engineering Applied Technology Center TM Department of Professional Education The UFPT is a modular, smart and unique fluid power and motion control
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
PLC Based Closed Loop Speed Control Of DC Shunt Motor
 ISSN: 2454-2377, PLC Based Closed Loop Speed Control Of DC Shunt Motor Mahesh Kumar K M 1 & Dr. P S Puttaswamy 2 1 Assistant Professor, Dept. of Electrical & Electronics Engineering PES College of Engineering,
ISSN: 2454-2377, PLC Based Closed Loop Speed Control Of DC Shunt Motor Mahesh Kumar K M 1 & Dr. P S Puttaswamy 2 1 Assistant Professor, Dept. of Electrical & Electronics Engineering PES College of Engineering,
Mechatronics & Industrial Automation Technician
 Brief Program Description The Mechatronics & Industrial Automation Technician program is a 9 week program designed to help students develop the skills and knowledge needed for work as entry-level industrial
Brief Program Description The Mechatronics & Industrial Automation Technician program is a 9 week program designed to help students develop the skills and knowledge needed for work as entry-level industrial
Test Rig Design for Measurement of Shock Absorber Characteristics
 Test Rig Design for Measurement of Shock Absorber Characteristics H. R. Sapramer Dr. G. D. Acharya Mechanical Engineering Department Principal Sir Bhavsinhaji Polytechnic Institute Atmiya Institute of
Test Rig Design for Measurement of Shock Absorber Characteristics H. R. Sapramer Dr. G. D. Acharya Mechanical Engineering Department Principal Sir Bhavsinhaji Polytechnic Institute Atmiya Institute of