E-VECTOORC, A Model of Cooperation
|
|
|
- Jonas Lane
- 5 years ago
- Views:
Transcription


1 E-VECTOORC, A Model of Cooperation Phil Barber Automotive Electronic Systems Innovation Network (AESIN) UK Automotive Electronics Conference October 2014
")
2 Contents Electric Vehicle Control of Individual Wheel Torque for On- and Off-Road Conditions Who What When (Details) Dissemination
3 Who Project Coordinator: Aldo Sorniotti (University of Surrey, UK)
4 Who Skoda JLR

5 Who Inverto is a technology company that designs and develops power electronics products. Flanders Drive are based close to the Lommel test track and offer management support in setting up research projects and access to advanced research infrastructure and test tracks. Punch Powertrain produce 400K transmission units a year and are researching into CVTs and Hybrid powertrains.
6 Who Fundacion CIDAUT is a Spanish non-profit research and development centre in transport and energy. The Instituto Tecnológico de Aragón (ITA) is a public non-profit research centre, established in 1984 by the regional government of Aragon TRW Koblenz
7 Who Ilmenau University of Technology University of Surrey VIF Kompetenzzentrum - Das virtuelle Fahrzeug, Forschungsgesellschaft mbh. an independent, international platform for research and development in the automotive industry.
8 What (for video see


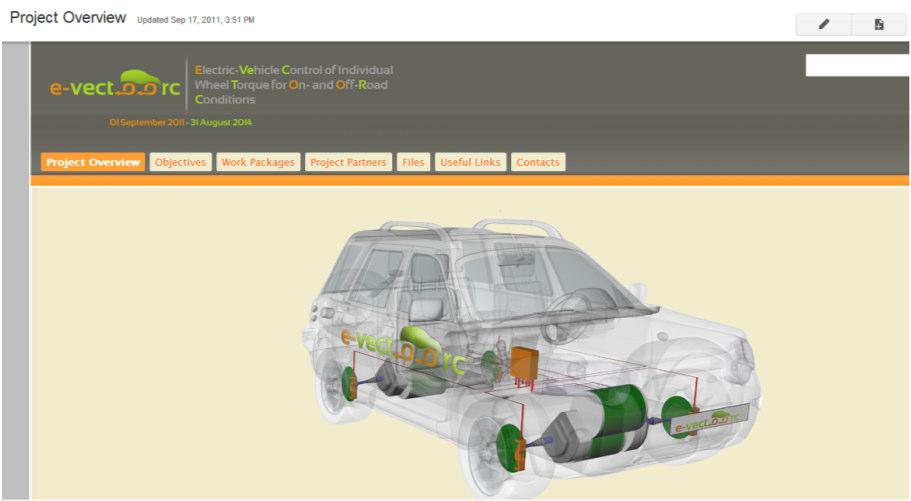
9 What The project was to investigate: How performance can be improved: Torque distribution Off road capability Vehicle dynamics Enhanced safety on the limit of adhesion How economy can be improved: Reduced parasitic losses Regenerative braking Investigation into opportunities for a detachable / trailer range extender This was achieved by: Delivery of a working 4eV prototype Delivery of a brake by wire vehicle Extensive CAE and Simulation studies [M1 Report]

 E N D BBW HIL tests, Ilmenau")


10 When 10/10/12 Technical review, Brussels 19/3/13 18 mth Review at Skoda 13/5/13 Dissemination Event,Graz 4WD Vehicle (Half shaft issues) E N D BBW HIL tests, Ilmenau Motor tests, Inverto 2WD Vehicle Tests Lommel Torque vectoring Vehicle Tests 4WD Vehicle build 600V Battery Vehicle Tests NEDC Dynamics EMC Dissemination Day Range Extender trailer
11 Details 4WD, 4 x Electric SR, inboard motor Evoque 600V, 9KWh battery pack TRW Brake by wire system + HIL rig at Ilmenau University Brake Blending and eabs Torque apportionment algorithms for understeer gradient compensation. Active (torsional) vibration control (electric anti shunt) Range extender trailer


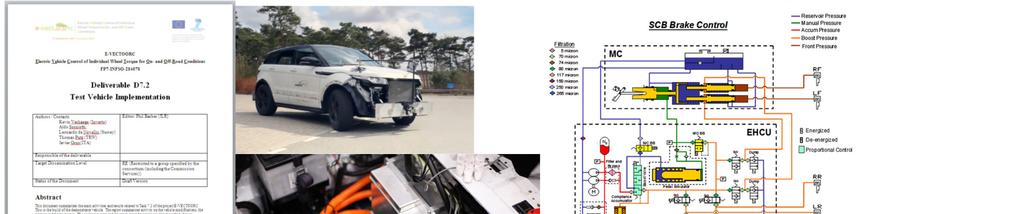


12 4WD Electric Evoque Details in Deliverable D7.2
 21087 kgmm² Inverter dimensions (WxHxD) 495x155x282 mm Inverter weight 16.")

13 Electric Motor Characteristics 600V Peak (30s) 200Nm, 75kW Nominal (continuous) 80Nm, 35kW Maximum speed min-1 Motor dimensions (LxD) 215x265 mm Motor weight 50 kg Motor inertia (without gearbox) kgmm² Inverter dimensions (WxHxD) 495x155x282 mm Inverter weight 16.2 kg Liquid cooled 15l/min, 55 C max inlet Operating temperature C HIL rig based efficiency maps of the motors in both regen (peak = 91%) and motoring (peak = 89) have been created by Inverto Torque estimators have been generated: one using using efficiency maps, one using current and rotor position A clear trade between torque ripple and efficiency was demonstrated extending the phase overlap reduces torque ripple, but adversely impacts efficiency.
14 Battery Characteristics Pack nominal voltage 600V Pack maximum voltage V Pack minimum voltage 414 V Peak current charge and discharge 400A Nominal current (continuous) charge and 200A discharge Peak power charge and discharge 310 kw Nominal power charge and discharge 121 kw Cell capacity 15Ah Energy 9.1kWh Mass Estimated 300kg (225 kg for current 400V pack) Operating temperature 0 55 C



15 Brake System Controllers of both foundation and regenerative braking through TRW s BBW and emotor control for ABS and stability control. Brake blending control algorithms Braking controller integrated with Carmaker, HIL rigs and the rest of the E-VECTOORC controller. EXPERIMENTAL INVESTIGATION OF BRAKING DYNAMICS OF ELECTRIC VEHICLE Ilmenau University of Technology, Germany, TRW Automotive, Germany
16 Control System Active Vibration Controller Brakes Blending Controller ABS and eabs Slip Control algorithm Figure Wheel speed and motor speed (rad/s) results for AVC ON and AVC OFF. 30kph and low torque conditions.
 results for AVC ON and AVC OFF. 60kph and braking conditions. Figure 1.4.1.- Wheel speed and motor speed (rad/s) results for AVC ON and AVC OFF. 30kph and low torque conditions.")
17 Active Vibration Control Synthetic drivetrain (gearbox / halfshaft) damper Electric version of anti-shunt. Consequent of 10:1 gearbox inboard motor. Figure Wheel speed and motor speed (rad/s) results for AVC ON and AVC OFF. 60kph and braking conditions. Figure Wheel speed and motor speed (rad/s) results for AVC ON and AVC OFF. 30kph and low torque conditions.

18 ABS and eabs Gains scheduled with speed Speed over ground state estimation, filters to establish slip Closed loop frequency domain analysis Stable slip target achieved. Figure 3.1 ABS and eabs control structure 0.05 Front left wheel Slip [/] Unfiltered Filter Kalman Time [s] Figure 3.5 Slip controller frequency response Figure 3.9 High bandwidth (10Hz) speed signal with increased proportional gain. Figure 3.3 Filtering of the speed signals and the effect on slip estimate.

19 Brake Blending Controller The brake blending algorithm is working correctly, generating a correct brake allocation and keeping the defined limits. Deceleration signal has no peaks or abrupt changes when there are transitions between both brake sources. Deceleration has slow variations along the test, whilst a constant value was expected. General tendency is to have a reduction when regenerative is increasing or maintained; when only friction is applied, higher deceleration is obtained. When only friction is considered, deceleration results are constant. Similar test should be done with regenerative brake only, to analyze the deceleration reduction obtained in the brake blending tests. Oscillations are obtained in longitudinal acceleration when the vehicle completely stops, with low frequency (possibly pitch) resonance. Pressure is released approx 1 second later, and no effect on acceleration is noticed. FL Torque Friction Motor Time (sec) 2 1 Vehicle accelerations Time (sec) Figure % speed limit case. Brake blending results in N m at the front-left motor
20 Vehicle Dynamics (Slip Control) Comparing vehicle modes which present the same reference yaw rate (i.e. baseline, normal mode and ESP mode), it can be seen that the vehicle in normal mode presents the smallest value of yaw rate overshoot and sideslip angle peak. When the sport mode tuning is chosen, the values of yaw rate overshoot and sideslip angle peak are considerably lower than the respective values measured for the baseline vehicle, although the sport mode presents more aggressive behaviour than the baseline vehicle itself. Looking at the plot of the longitudinal vehicle speed during a step steer, the comparison between the vehicle modes which present the same reference yaw rate (baseline, normal mode, ESP mode) shows that the reduction of the vehicle speed for the normal mode is lower than the one evaluated for the baseline vehicle because of the increased induced drag generated for the baseline vehicle. This is consequent to the larger values of lateral slip. The vehicle in ESP mode decelerates more with respect to the vehicle in normal mode because of the braking action performed by the actuation of the friction brakes for the understeer/oversteer correction during the step steer manoeuvre. normal mode 100 sport mode baseline 80 δ [deg] Figure Skid pad tests carried out at radius R = 60 m for the 2WD version of the vehicle demonstrator. Baseline vehicle (dot-dashed line), torque-vectoring vehicle in normal mode (solid line) and torque-vectoring vehicle in sport mode (dashed line a y [m/s 2 ]
21 Trailer Range Extender Requirements 20kW installed, 4-600V delivered To support 2hrs continuous usage of vehicle It was resolved by the consortia that this range extender market is very fast moving. Direct competition in this market was not of primary interest to the development of the project aims, however a new concept of a demountable range extender was to be investigated. This would both support the track testing and investigate the utility and acceptability of this concept for inter-city hybrid mobility. The target mass of the developed trailer was to be close to the 750Kg threshold for trailers where there is a breakpoint in the driver licencing requirements. The trailer had to be aesthetically appealing to the market.

22 Trailer Range Extender Requirements 20kW installed, 4-600V delivered To support 2hrs continuous usage of vehicle Trailer Developed: A trailer, styled to match the RR Evoque was developed using off the shelf hardware, including a standard diesel engine and power electronics. The styling was coordinated with the E-VECTOORC vehicle. Weight: 800Kg Generator output 400Vac, 3phase, 22KVA (19.8KW), Charging Output voltage max800vdc Charging Output current max 25Amps + Single phase socket 230Vac, 16amp Control, Starting and charging 12Vdc 12V Battery capacity 95Ah, 850 CCA
 Heritage Centre, Gaydon 28th August 2014 Organisers Phil Barber, Nigel Clarke (Jaguar Land Rover) Valentin Ivanov (Ilmenau University of Technology) Aldo Sorniotti (University of Surrey) 09:30")
 10:30 Switched reluctance motors (Inverto) 16:00 Friction brake system (by-wire) implemented on the vehicle demonstrator (tba, TRW; Dzmitry Savitski, Ilmenau")
 Session 5: Closing remarks and open discussion of other projects related to E-VECTOORC 17:30 Other projects related to E-VECTOORC (Aldo Sorniotti,")
23 Public Dissemination Event 28 th August, Heritage Centre Session 4: Vehicle longitudinal dynamics and control E-VECTOORC Dissemination Event Agenda (Draft) (v.2) Heritage Centre, Gaydon 28th August 2014 Organisers Phil Barber, Nigel Clarke (Jaguar Land Rover) Valentin Ivanov (Ilmenau University of Technology) Aldo Sorniotti (University of Surrey) 09:30 Welcome / timetable of the event (Mike Richardson) 09:45 E-VECTOORC project and objectives overview (University of Surrey) Session 1: Demonstrator vehicle construction 10:00 Vehicle requirements, architecture and build (Flanders Drive) 10:30 Switched reluctance motors (Inverto) 16:00 Friction brake system (by-wire) implemented on the vehicle demonstrator (tba, TRW; Dzmitry Savitski, Ilmenau University of Technology) 16:30 Torsional vibration control of on-board electric drivetrains (ITA) 17:00 Regenerative braking and longitudinal slip control using electric machines (Dzmitry Savitski; Ilmenau University of Technology; tba, ITA) Session 5: Closing remarks and open discussion of other projects related to E-VECTOORC 17:30 Other projects related to E-VECTOORC (Aldo Sorniotti, University of Surrey) Session 2: Safety and reliability aspects of fully electric vehicles 11:00 EMC testing for fully electric vehicles (ITA) 11:30 Functional safety for fully electric vehicles (Flanders Drive, CIDAUT) Session 3 : Direct yaw moment controllers 14:00 Objectives of the E-VECTOORC yaw moment controller and analyses based on the quasi-static model (University of Surrey) 14:30 Comparison of yaw moment controller formulations (University of Surrey, ViF) 15:00 Experimental results and benchmarking (University of Surrey, Jaguar Land Rover and SKODA Auto)



24 References: guarlandrover.com/evectoorc/




25 Pictures, Video
26 Next: Feed of results into other research and delivery programs Further research inside JLR... Further EC research, this time JLR as 'Assisting Partner'
27 Conclusions: Strong consortia (mix) led by capable and proactive project manager reporting to Project Officer at EC. Vehicle was pivotal to motivation and to validation.. It had to work. Physically remote, but good team building events due to nature of travel (extra mural events). Expense of travel. Time out of office (or away from the family) travelling. Budget management overhead not to be underestimated, financial support by EC (and ratio rules). Deadlines imposed by EC to meet and deliver by (e.g. dissemination activities). Significant commitment is required. 'Why contribute', the secondary agendas are sometimes the most important. Relationship building for the consultative partners or potential start up suppliers.
28 Questions?
Torque-Vectoring Control for Fully Electric Vehicles: Model-Based Design, Simulation and Vehicle Testing
 Torque-Vectoring Control for Fully Electric Vehicles: Model-Based Design, Simulation and Vehicle Testing Leonardo De Novellis, Aldo Sorniotti, Patrick Gruber University of Surrey, UK a.sorniotti@surrey.ac.uk
Torque-Vectoring Control for Fully Electric Vehicles: Model-Based Design, Simulation and Vehicle Testing Leonardo De Novellis, Aldo Sorniotti, Patrick Gruber University of Surrey, UK a.sorniotti@surrey.ac.uk
Electric Torque Vectoring
 Research E traction Authors Electric Torque Vectoring for Electric Vehicles Dipl.-Ing. Bernhard Knauder is Senior Researcher in the area Electrics/ Electronics and Software at the VIRTUAL VEHICLE Research
Research E traction Authors Electric Torque Vectoring for Electric Vehicles Dipl.-Ing. Bernhard Knauder is Senior Researcher in the area Electrics/ Electronics and Software at the VIRTUAL VEHICLE Research
Deliverable D8.4 Final Dissemination Report
 E-VECTOORC Electric Vehicle Control of Individual Wheel Torque for On- and Off-Road Conditions FP7-INFSO-284078 Deliverable D8.4 Final Dissemination Report Author(s) Responsible of the deliverable Target
E-VECTOORC Electric Vehicle Control of Individual Wheel Torque for On- and Off-Road Conditions FP7-INFSO-284078 Deliverable D8.4 Final Dissemination Report Author(s) Responsible of the deliverable Target
Low Carbon Technology Project Workstream 8 Vehicle Dynamics and Traction control for Maximum Energy Recovery
 Low Carbon Technology Project Workstream 8 Vehicle Dynamics and Traction control for Maximum Energy Recovery Phil Barber CENEX Technical review 19 th May 2011 Overview of WS8 Workstream 8 was set up to
Low Carbon Technology Project Workstream 8 Vehicle Dynamics and Traction control for Maximum Energy Recovery Phil Barber CENEX Technical review 19 th May 2011 Overview of WS8 Workstream 8 was set up to
ICT Green Cars 2013 FP ICT-GC. Integrated Control of Multiple-Motor and Multiple-Storage Fully Electric Vehicles. Deliverable 7.
 ICT Green Cars 2013 FP7-2013-ICT-GC Integrated Control of Multiple-Motor and Multiple-Storage Fully Electric Vehicles Deliverable 7.1 Demonstrator vehicles available DOCUMENT INFORMATION Public D7.1 Demonstrator
ICT Green Cars 2013 FP7-2013-ICT-GC Integrated Control of Multiple-Motor and Multiple-Storage Fully Electric Vehicles Deliverable 7.1 Demonstrator vehicles available DOCUMENT INFORMATION Public D7.1 Demonstrator
Modification of IPG Driver for Road Robustness Applications
 Modification of IPG Driver for Road Robustness Applications Alexander Shawyer (BEng, MSc) Alex Bean (BEng, CEng. IMechE) SCS Analysis & Virtual Tools, Braking Development Jaguar Land Rover Introduction
Modification of IPG Driver for Road Robustness Applications Alexander Shawyer (BEng, MSc) Alex Bean (BEng, CEng. IMechE) SCS Analysis & Virtual Tools, Braking Development Jaguar Land Rover Introduction
Characterisation of Longitudinal Response for a Full-Time Four Wheel Drive Vehicle
 2009 Vehicle Dynamics and Control Seminar Characterisation of Longitudinal Response for a Full-Time Four Wheel Drive Vehicle Jas Pawar (EngD Research Student) Sean Biggs (Project Supervisor & Principal
2009 Vehicle Dynamics and Control Seminar Characterisation of Longitudinal Response for a Full-Time Four Wheel Drive Vehicle Jas Pawar (EngD Research Student) Sean Biggs (Project Supervisor & Principal
On the energy efficiency of electric vehicles with multiple motors
 On the energy efficiency of electric vehicles with multiple motors DE FILIPPIS, Giovanni, LENZO, Basilio , SORNIOTTI, Aldo, GRUBER, Patrick, SANNEN, Koen and DE SMET, Jasper Available
On the energy efficiency of electric vehicles with multiple motors DE FILIPPIS, Giovanni, LENZO, Basilio , SORNIOTTI, Aldo, GRUBER, Patrick, SANNEN, Koen and DE SMET, Jasper Available
Driving dynamics and hybrid combined in the torque vectoring
 Driving dynamics and hybrid combined in the torque vectoring Concepts of axle differentials with hybrid functionality and active torque distribution Vehicle Dynamics Expo 2009 Open Technology Forum Dr.
Driving dynamics and hybrid combined in the torque vectoring Concepts of axle differentials with hybrid functionality and active torque distribution Vehicle Dynamics Expo 2009 Open Technology Forum Dr.
Understeer characteristics for energy-efficient fully electric vehicles with multiple motors
 Understeer characteristics for energy-efficient fully electric vehicles with multiple motors LENZO, Basilio , SORNIOTTI, A, DE FILIPPIS, G, GRUBER, P and SANNEN, K Available
Understeer characteristics for energy-efficient fully electric vehicles with multiple motors LENZO, Basilio , SORNIOTTI, A, DE FILIPPIS, G, GRUBER, P and SANNEN, K Available
Deliverable D8.3 Year 2 Dissemination Report
 E-VECTOORC Electric Vehicle Control of Individual Wheel Torque for On- and Off-Road Conditions FP7-INFSO-284078 Deliverable D8.3 Year 2 Dissemination Report Author(s) Responsible of the deliverable Target
E-VECTOORC Electric Vehicle Control of Individual Wheel Torque for On- and Off-Road Conditions FP7-INFSO-284078 Deliverable D8.3 Year 2 Dissemination Report Author(s) Responsible of the deliverable Target
Flanders Make Mission
 Flanders Make Strategic Research Centre for the Manufacturing Industry Energy Efficiency in Mechatronics: why, what and how? Walter Driesen, Program Manager Flanders Make Mission It is our mission to strengthen
Flanders Make Strategic Research Centre for the Manufacturing Industry Energy Efficiency in Mechatronics: why, what and how? Walter Driesen, Program Manager Flanders Make Mission It is our mission to strengthen
Active Systems Design: Hardware-In-the-Loop Simulation
 Active Systems Design: Hardware-In-the-Loop Simulation Eng. Aldo Sorniotti Eng. Gianfrancesco Maria Repici Departments of Mechanics and Aerospace Politecnico di Torino C.so Duca degli Abruzzi - 10129 Torino
Active Systems Design: Hardware-In-the-Loop Simulation Eng. Aldo Sorniotti Eng. Gianfrancesco Maria Repici Departments of Mechanics and Aerospace Politecnico di Torino C.so Duca degli Abruzzi - 10129 Torino
Torque Vectoring for Electric Vehicles with Individually Controlled Motors: State-of-the-Art and Future Developments
 World Electric Vehicle Journal Vol. 5 - ISSN 2032-6653 - 2012 WEVA Page 0617 EVS26 Los Angeles, California, May 6-9, 2012 Torque Vectoring for Electric Vehicles with Individually Controlled Motors: State-of-the-Art
World Electric Vehicle Journal Vol. 5 - ISSN 2032-6653 - 2012 WEVA Page 0617 EVS26 Los Angeles, California, May 6-9, 2012 Torque Vectoring for Electric Vehicles with Individually Controlled Motors: State-of-the-Art
development of hybrid electric vehicles
 IPG Technology Conference Karlsruhe 2012 A multi physical simulation architecture to support the development of hybrid electric vehicles James Chapman CAE Simulation Group Jaguar Land Rover Embedded Systems
IPG Technology Conference Karlsruhe 2012 A multi physical simulation architecture to support the development of hybrid electric vehicles James Chapman CAE Simulation Group Jaguar Land Rover Embedded Systems
Energy efficient torque vectoring control
 Energy efficient torque vectoring control P. Gruber, A. Sorniotti, B. Lenzo, G. De Filippis, S. Fallah University of Surrey, Guildford, United Kingdom ABSTRACT: Tire forces are at the heart of the dynamic
Energy efficient torque vectoring control P. Gruber, A. Sorniotti, B. Lenzo, G. De Filippis, S. Fallah University of Surrey, Guildford, United Kingdom ABSTRACT: Tire forces are at the heart of the dynamic
Bicycle Hardware in the Loop Simulator for Braking Dynamics Assistance System
 Bicycle Hardware in the Loop Simulator for Braking Dynamics Assistance System IPG Apply & Innovate 2016 Conference Session: Off Highway Cornelius Bott, Martin Pfeiffer, Oliver Maier, Jürgen Wrede 21.09.2016
Bicycle Hardware in the Loop Simulator for Braking Dynamics Assistance System IPG Apply & Innovate 2016 Conference Session: Off Highway Cornelius Bott, Martin Pfeiffer, Oliver Maier, Jürgen Wrede 21.09.2016
High performance and low CO 2 from a Flybrid mechanical kinetic energy recovery system
 High performance and low CO 2 from a Flybrid mechanical kinetic energy recovery system A J Deakin Torotrak Group PLC. UK Abstract Development of the Flybrid Kinetic Energy Recovery System (KERS) has been
High performance and low CO 2 from a Flybrid mechanical kinetic energy recovery system A J Deakin Torotrak Group PLC. UK Abstract Development of the Flybrid Kinetic Energy Recovery System (KERS) has been
Enhancing the Energy Efficiency of Fully Electric Vehicles via the Minimization of Motor Power Losses
 Enhancing the Energy Efficiency of Fully Electric Vehicles via the Minimization of Motor Power Losses A. Pennycott 1, L. De Novellis 1, P. Gruber 1, A. Sorniotti 1 and T. Goggia 1, 2 1 Dept. of Mechanical
Enhancing the Energy Efficiency of Fully Electric Vehicles via the Minimization of Motor Power Losses A. Pennycott 1, L. De Novellis 1, P. Gruber 1, A. Sorniotti 1 and T. Goggia 1, 2 1 Dept. of Mechanical
Preliminary Study on Quantitative Analysis of Steering System Using Hardware-in-the-Loop (HIL) Simulator
 Simulator") TECHNICAL PAPER Preliminary Study on Quantitative Analysis of Steering System Using Hardware-in-the-Loop (HIL) Simulator M. SEGAWA M. HIGASHI One of the objectives in developing simulation methods is to
TECHNICAL PAPER Preliminary Study on Quantitative Analysis of Steering System Using Hardware-in-the-Loop (HIL) Simulator M. SEGAWA M. HIGASHI One of the objectives in developing simulation methods is to
A Methodology to Investigate the Dynamic Characteristics of ESP Hydraulic Units - Part II: Hardware-In-the-Loop Tests
 A Methodology to Investigate the Dynamic Characteristics of ESP Hydraulic Units - Part II: Hardware-In-the-Loop Tests Aldo Sorniotti Politecnico di Torino, Department of Mechanics Corso Duca degli Abruzzi
A Methodology to Investigate the Dynamic Characteristics of ESP Hydraulic Units - Part II: Hardware-In-the-Loop Tests Aldo Sorniotti Politecnico di Torino, Department of Mechanics Corso Duca degli Abruzzi
Co-Simulation of GT-Suite and CarMaker for Real Traffic and Race Track Simulations
 Co-Simulation of GT-Suite and CarMaker for Real Traffic and Race Track Simulations GT-Suite Conference Frankfurt, 26 th October 215 Andreas Balazs, BGA-T Agenda Introduction Methodology FEV GT-Drive model
Co-Simulation of GT-Suite and CarMaker for Real Traffic and Race Track Simulations GT-Suite Conference Frankfurt, 26 th October 215 Andreas Balazs, BGA-T Agenda Introduction Methodology FEV GT-Drive model
The role of the tyre in traction-induced driveline vibrations
 The role of the tyre in traction-induced driveline vibrations By Matthew Bartram and George Mavros Department of Aeronautical and Automotive Engineering Loughborough University United Kingdom Vehicle Dynamics
The role of the tyre in traction-induced driveline vibrations By Matthew Bartram and George Mavros Department of Aeronautical and Automotive Engineering Loughborough University United Kingdom Vehicle Dynamics
In Wheel Motors and their Value Propositions in the Automotive Industry
 In Wheel Motors and their Value Propositions in the Automotive Industry Dr Richard Ford Vehicle Engineering and Controls Manager 12 th September 2018 Contents 1. 2. 3. 4. ProteanDrive overview Approximate
In Wheel Motors and their Value Propositions in the Automotive Industry Dr Richard Ford Vehicle Engineering and Controls Manager 12 th September 2018 Contents 1. 2. 3. 4. ProteanDrive overview Approximate
NEWS RELEASE EVE HYBRID TECHNOLOGY DEMONSTRATOR SHOWCASES RETRO-INTEGRATION OF HYBRID SOLUTIONS
 Page 1 of 8 EVE HYBRID TECHNOLOGY DEMONSTRATOR SHOWCASES RETRO-INTEGRATION OF HYBRID SOLUTIONS An Innovative R & D project by Lotus Engineering and Proton Holdings Bhd features hybrid solutions that deliver
Page 1 of 8 EVE HYBRID TECHNOLOGY DEMONSTRATOR SHOWCASES RETRO-INTEGRATION OF HYBRID SOLUTIONS An Innovative R & D project by Lotus Engineering and Proton Holdings Bhd features hybrid solutions that deliver
Dynamic Behavior Analysis of Hydraulic Power Steering Systems
 Dynamic Behavior Analysis of Hydraulic Power Steering Systems Y. TOKUMOTO * *Research & Development Center, Control Devices Development Department Research regarding dynamic modeling of hydraulic power
Dynamic Behavior Analysis of Hydraulic Power Steering Systems Y. TOKUMOTO * *Research & Development Center, Control Devices Development Department Research regarding dynamic modeling of hydraulic power
Optimal energy efficiency, vehicle stability and safety on the OpEneR EV with electrified front and rear axles
 Optimal energy efficiency, vehicle stability and safety on the OpEneR EV with electrified front and rear axles Berlin, Monday 17 June 2013 Dr. Stephen Jones, AVL Emre Kural, AVL Alexander Massoner, AVL
Optimal energy efficiency, vehicle stability and safety on the OpEneR EV with electrified front and rear axles Berlin, Monday 17 June 2013 Dr. Stephen Jones, AVL Emre Kural, AVL Alexander Massoner, AVL
Improving Heavy Vehicle Emergency Braking Systems. Jonathan Miller and David Cebon Cambridge University, UK
 Improving Heavy Vehicle Emergency Braking Systems Jonathan Miller and David Cebon Cambridge University, UK Presentation Overview Introduction Sliding Mode Slip Control Friction and Brake Gain Estimation
Improving Heavy Vehicle Emergency Braking Systems Jonathan Miller and David Cebon Cambridge University, UK Presentation Overview Introduction Sliding Mode Slip Control Friction and Brake Gain Estimation
Ming Cheng, Bo Chen, Michigan Technological University
 THE MODEL INTEGRATION AND HARDWARE-IN-THE-LOOP (HIL) SIMULATION DESIGN FOR THE ANALYSIS OF A POWER-SPLIT HYBRID ELECTRIC VEHICLE WITH ELECTROCHEMICAL BATTERY MODEL Ming Cheng, Bo Chen, Michigan Technological
THE MODEL INTEGRATION AND HARDWARE-IN-THE-LOOP (HIL) SIMULATION DESIGN FOR THE ANALYSIS OF A POWER-SPLIT HYBRID ELECTRIC VEHICLE WITH ELECTROCHEMICAL BATTERY MODEL Ming Cheng, Bo Chen, Michigan Technological
INCREASING ENERGY EFFICIENCY BY MODEL BASED DESIGN
 INCREASING ENERGY EFFICIENCY BY MODEL BASED DESIGN GREGORY PINTE THE MATHWORKS CONFERENCE 2015 EINDHOVEN 23/06/2015 FLANDERS MAKE Strategic Research Center for the manufacturing industry Integrating the
INCREASING ENERGY EFFICIENCY BY MODEL BASED DESIGN GREGORY PINTE THE MATHWORKS CONFERENCE 2015 EINDHOVEN 23/06/2015 FLANDERS MAKE Strategic Research Center for the manufacturing industry Integrating the
Vehicle Dynamics and Control
 Rajesh Rajamani Vehicle Dynamics and Control Springer Contents Dedication Preface Acknowledgments v ix xxv 1. INTRODUCTION 1 1.1 Driver Assistance Systems 2 1.2 Active Stabiüty Control Systems 2 1.3 RideQuality
Rajesh Rajamani Vehicle Dynamics and Control Springer Contents Dedication Preface Acknowledgments v ix xxv 1. INTRODUCTION 1 1.1 Driver Assistance Systems 2 1.2 Active Stabiüty Control Systems 2 1.3 RideQuality
AVL SERIES BATTERY BENCHMARKING. Getting from low level parameter to target orientation
 1 AVL SERIES BATTERY BENCHMARKING Getting from low level parameter to target orientation CONTENTS OVERVIEW 1. AVL Introduction 2. Focus Series Battery Benchmarking 3. Benchmarking process 4. Target comparability
1 AVL SERIES BATTERY BENCHMARKING Getting from low level parameter to target orientation CONTENTS OVERVIEW 1. AVL Introduction 2. Focus Series Battery Benchmarking 3. Benchmarking process 4. Target comparability
Simulated EV Dynamics: Safety & etvc
 Simulated EV Dynamics: Safety & etvc Dr. Stephen Jones et. al., AVL List GmbH stephen.jones@avl.com +43 316 787 4484 26.09.11 ARTEMIS ARTEMIS Pollux POLLUX Project Project Process Oriented electronic control
Simulated EV Dynamics: Safety & etvc Dr. Stephen Jones et. al., AVL List GmbH stephen.jones@avl.com +43 316 787 4484 26.09.11 ARTEMIS ARTEMIS Pollux POLLUX Project Project Process Oriented electronic control
Hybrid Architectures for Automated Transmission Systems
 1 / 5 Hybrid Architectures for Automated Transmission Systems - add-on and integrated solutions - Dierk REITZ, Uwe WAGNER, Reinhard BERGER LuK GmbH & Co. ohg Bussmatten 2, 77815 Bühl, Germany (E-Mail:
1 / 5 Hybrid Architectures for Automated Transmission Systems - add-on and integrated solutions - Dierk REITZ, Uwe WAGNER, Reinhard BERGER LuK GmbH & Co. ohg Bussmatten 2, 77815 Bühl, Germany (E-Mail:
EGVIA Workshop: European funded project results - Reduction of CO2 emissions from Heavy-Duty Trucks.
 EGVIA Workshop: European funded project results - Reduction of CO2 emissions from Heavy-Duty Trucks www.ecochamps.eu General Information ECOCHAMPS Project full title: Coordinator: Consortium: Call: European
EGVIA Workshop: European funded project results - Reduction of CO2 emissions from Heavy-Duty Trucks www.ecochamps.eu General Information ECOCHAMPS Project full title: Coordinator: Consortium: Call: European
VIPER Vehicle Integrated Powertrain Energy Recovery LCV12 IDP4 Strengthening the UK Supply Chain
 VIPER Vehicle Integrated Powertrain Energy Recovery LCV12 IDP4 Strengthening the UK Supply Chain Meeting Location: Millbrook POWERTRAIN ADVANCED ENGINEERING Bob Gilchrist September 2012 Project Overview
VIPER Vehicle Integrated Powertrain Energy Recovery LCV12 IDP4 Strengthening the UK Supply Chain Meeting Location: Millbrook POWERTRAIN ADVANCED ENGINEERING Bob Gilchrist September 2012 Project Overview
Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for In-wheel Electric Vehicle
 World Electric ehicle Journal ol. 6 - ISSN 232-6653 - 23 WEA Page Page 86 ES27 Barcelona, Spain, November 7-2, 23 Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for
World Electric ehicle Journal ol. 6 - ISSN 232-6653 - 23 WEA Page Page 86 ES27 Barcelona, Spain, November 7-2, 23 Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for
MORSE: MOdel-based Real-time Systems Engineering. Reducing physical testing in the calibration of diagnostic and driveabilty features
 MORSE: MOdel-based Real-time Systems Engineering Reducing physical testing in the calibration of diagnostic and driveabilty features Mike Dempsey Claytex Future Powertrain Conference 2017 MORSE project
MORSE: MOdel-based Real-time Systems Engineering Reducing physical testing in the calibration of diagnostic and driveabilty features Mike Dempsey Claytex Future Powertrain Conference 2017 MORSE project
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics.
 Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted.
 Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted. Introduction Presenter Thomas Desbarats Business Development Simcenter System
Design and evaluate vehicle architectures to reach the best trade-off between performance, range and comfort. Unrestricted. Introduction Presenter Thomas Desbarats Business Development Simcenter System
Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for In-wheel Electric Vehicle
 ES27 Barcelona, Spain, November 7-2, 23 Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for In-wheel Electric ehicle Sungyeon Ko, Chulho Song, Jeongman Park, Jiweon
ES27 Barcelona, Spain, November 7-2, 23 Comparison of Braking Performance by Electro-Hydraulic ABS and Motor Torque Control for In-wheel Electric ehicle Sungyeon Ko, Chulho Song, Jeongman Park, Jiweon
NVH vs. Vehicle Fuel Economy Trade-off
 NVH vs. Vehicle Fuel Economy Trade-off Mario Felice, Jack Liu, Imad Khan Ford Motor Company Jonathan Zeman, Llorenc Gomez Gamma Technologies Wulong Sun MSC Software Michael Platten Romax Technology 2015
NVH vs. Vehicle Fuel Economy Trade-off Mario Felice, Jack Liu, Imad Khan Ford Motor Company Jonathan Zeman, Llorenc Gomez Gamma Technologies Wulong Sun MSC Software Michael Platten Romax Technology 2015
Powertrain and Chassis Hardware-in-the- Loop (HIL) Simulation of Ford s Autonomous Vehicle Platform
 Simulation of Ford s Autonomous Vehicle Platform") Powertrain and Chassis Hardware-in-the- Loop (HIL) Simulation of Ford s Autonomous Vehicle Platform Adit Joshi Research Engineer Automated Driving HIL Simulation Ford Motor Company 1 OUTLINE Autonomous
Powertrain and Chassis Hardware-in-the- Loop (HIL) Simulation of Ford s Autonomous Vehicle Platform Adit Joshi Research Engineer Automated Driving HIL Simulation Ford Motor Company 1 OUTLINE Autonomous
Feature Article. Wheel Slip Simulation for Dynamic Road Load Simulation. Bryce Johnson. Application Reprint of Readout No. 38.
 Feature Article Feature Wheel Slip Simulation Article for Dynamic Road Load Simulation Application Application Reprint of Readout No. 38 Wheel Slip Simulation for Dynamic Road Load Simulation Bryce Johnson
Feature Article Feature Wheel Slip Simulation Article for Dynamic Road Load Simulation Application Application Reprint of Readout No. 38 Wheel Slip Simulation for Dynamic Road Load Simulation Bryce Johnson
Utilizing a Small Efficient DCT for the Chinese Market
 Utilizing a Small Efficient DCT for the Chinese Market Drivetrain Forum 2016, Untergruppenbach Sascha K. Mierbach GETRAG, Platform Director Small DCT, Magna Powertrain Utilizing a Small Efficient DCT for
Utilizing a Small Efficient DCT for the Chinese Market Drivetrain Forum 2016, Untergruppenbach Sascha K. Mierbach GETRAG, Platform Director Small DCT, Magna Powertrain Utilizing a Small Efficient DCT for
Development of Motor-Assisted Hybrid Traction System
 Development of -Assisted Hybrid Traction System 1 H. IHARA, H. KAKINUMA, I. SATO, T. INABA, K. ANADA, 2 M. MORIMOTO, Tetsuya ODA, S. KOBAYASHI, T. ONO, R. KARASAWA Hokkaido Railway Company, Sapporo, Japan
Development of -Assisted Hybrid Traction System 1 H. IHARA, H. KAKINUMA, I. SATO, T. INABA, K. ANADA, 2 M. MORIMOTO, Tetsuya ODA, S. KOBAYASHI, T. ONO, R. KARASAWA Hokkaido Railway Company, Sapporo, Japan
ACTIVE VIBRATION CONTROL FOR TORSIONAL OSCILLATIONS IN POWERTRAINS FOR FULLY ELECTRIC VEHICLES
 F24-Special Session Vehicle Dynamics Control for Fully Electric Vehicles Outcomes of the European Project E-VECTOORC ACTIVE VIBRATION CONTROL FOR TORSIONAL OSCILLATIONS IN POWERTRAINS FOR FULLY ELECTRIC
F24-Special Session Vehicle Dynamics Control for Fully Electric Vehicles Outcomes of the European Project E-VECTOORC ACTIVE VIBRATION CONTROL FOR TORSIONAL OSCILLATIONS IN POWERTRAINS FOR FULLY ELECTRIC
OpEneR Optimal Energy Consumption and Recovery based on system network
 OpEneR Optimal Energy Consumption and Recovery based on system network Deliverable 2.3: Report documenting vehicle specification, topology and simulation results. Also running vehicle delivery Version
OpEneR Optimal Energy Consumption and Recovery based on system network Deliverable 2.3: Report documenting vehicle specification, topology and simulation results. Also running vehicle delivery Version
Controlled Power Technologies CPT SpeedStart. Belt-Integrated Starter Generator
 Controlled Power Technologies CPT SpeedStart Belt-Integrated Starter Generator CPT SpeedStart Belt-Integrated Starter Generator CPT SpeedStart is a highly adaptable 48V motor-generator to support the next
Controlled Power Technologies CPT SpeedStart Belt-Integrated Starter Generator CPT SpeedStart Belt-Integrated Starter Generator CPT SpeedStart is a highly adaptable 48V motor-generator to support the next
Session 5 Wind Turbine Scaling and Control W. E. Leithead
 SUPERGEN Wind Wind Energy Technology Session 5 Wind Turbine Scaling and Control W. E. Leithead Supergen 2 nd Training Seminar 24 th /25 th March 2011 Wind Turbine Scaling and Control Outline Introduction
SUPERGEN Wind Wind Energy Technology Session 5 Wind Turbine Scaling and Control W. E. Leithead Supergen 2 nd Training Seminar 24 th /25 th March 2011 Wind Turbine Scaling and Control Outline Introduction
High efficient SI-engine with ultra high injection pressure Chalmers University]
![High efficient SI-engine with ultra high injection pressure Chalmers University]](/thumbs/81/82870381.jpg "High efficient SI-engine with ultra high injection pressure Chalmers University]") High efficient SI-engine with ultra high injection pressure [Research @ Chalmers University] Event; Energirelaterad forskning, 2017 Gothenburg, Sweden 5 th October 2017 Peter Granqvist President DENSO
High efficient SI-engine with ultra high injection pressure [Research @ Chalmers University] Event; Energirelaterad forskning, 2017 Gothenburg, Sweden 5 th October 2017 Peter Granqvist President DENSO
Simulation of Collective Load Data for Integrated Design and Testing of Vehicle Transmissions. Andreas Schmidt, Audi AG, May 22, 2014
 Simulation of Collective Load Data for Integrated Design and Testing of Vehicle Transmissions Andreas Schmidt, Audi AG, May 22, 2014 Content Introduction Usage of collective load data in the development
Simulation of Collective Load Data for Integrated Design and Testing of Vehicle Transmissions Andreas Schmidt, Audi AG, May 22, 2014 Content Introduction Usage of collective load data in the development
Building Fast and Accurate Powertrain Models for System and Control Development
 Building Fast and Accurate Powertrain Models for System and Control Development Prasanna Deshpande 2015 The MathWorks, Inc. 1 Challenges for the Powertrain Engineering Teams How to design and test vehicle
Building Fast and Accurate Powertrain Models for System and Control Development Prasanna Deshpande 2015 The MathWorks, Inc. 1 Challenges for the Powertrain Engineering Teams How to design and test vehicle
GT-Suite European User Conference
 GT-Suite European User Conference E-Charging on a High Performance Diesel engine D. Peci, C. Venezia EMEA Region - Powertrain Engineering Powertrain Research&Technology Frankfurt, Germany October 26th,
GT-Suite European User Conference E-Charging on a High Performance Diesel engine D. Peci, C. Venezia EMEA Region - Powertrain Engineering Powertrain Research&Technology Frankfurt, Germany October 26th,
In- wheel Motors. Center for Automo3ve Research Business of Plugging In October 11, 2011
 In- wheel Motors Center for Automo3ve Research Business of Plugging In October 11, 2011 ! Protean Electric Inc. American Company Patented In-wheel Motor Design for: o EV o PHEV o Hybrid! Product Offering:
In- wheel Motors Center for Automo3ve Research Business of Plugging In October 11, 2011 ! Protean Electric Inc. American Company Patented In-wheel Motor Design for: o EV o PHEV o Hybrid! Product Offering:
ABS. Prof. R.G. Longoria Spring v. 1. ME 379M/397 Vehicle System Dynamics and Control
 ABS Prof. R.G. Longoria Spring 2002 v. 1 Anti-lock Braking Systems These systems monitor operating conditions and modify the applied braking torque by modulating the brake pressure. The systems try to
ABS Prof. R.G. Longoria Spring 2002 v. 1 Anti-lock Braking Systems These systems monitor operating conditions and modify the applied braking torque by modulating the brake pressure. The systems try to
MODELING, VALIDATION AND ANALYSIS OF HMMWV XM1124 HYBRID POWERTRAIN
 2014 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM POWER & MOBILITY (P&M) TECHNICAL SESSION AUGUST 12-14, 2014 - NOVI, MICHIGAN MODELING, VALIDATION AND ANALYSIS OF HMMWV XM1124 HYBRID
2014 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM POWER & MOBILITY (P&M) TECHNICAL SESSION AUGUST 12-14, 2014 - NOVI, MICHIGAN MODELING, VALIDATION AND ANALYSIS OF HMMWV XM1124 HYBRID
EVs and PHEVs environmental and technological evaluation in actual use
 Énergies renouvelables Production éco-responsable Transports innovants Procédés éco-efficients Ressources durables EVs and PHEVs environmental and technological evaluation in actual use F. Badin, IFPEN,
Énergies renouvelables Production éco-responsable Transports innovants Procédés éco-efficients Ressources durables EVs and PHEVs environmental and technological evaluation in actual use F. Badin, IFPEN,
A dream? Dr. Jürgen Bredenbeck Tire Technology Expo, February 2012 Cologne
 Rolling resistance measurement on the road: A dream? Dr. Jürgen Bredenbeck Tire Technology Expo, 14.-16. February 2012 Cologne Content Motivation Introduction of the used Measurement Equipment Introduction
Rolling resistance measurement on the road: A dream? Dr. Jürgen Bredenbeck Tire Technology Expo, 14.-16. February 2012 Cologne Content Motivation Introduction of the used Measurement Equipment Introduction
Booming Noise Optimization on an All Wheel Drive Vehicle
 on an All Wheel Drive Vehicle 3 rd International Conference Dynamic Simulation in Vehicle Engineering, 22-23 May 2014, St. Valentin, Austria Dr. Thomas Mrazek, ECS Team Leader Vehicle Dynamics ECS / Disclosure
on an All Wheel Drive Vehicle 3 rd International Conference Dynamic Simulation in Vehicle Engineering, 22-23 May 2014, St. Valentin, Austria Dr. Thomas Mrazek, ECS Team Leader Vehicle Dynamics ECS / Disclosure
Testing(and(evaluation(of(fault(handling( strategies(in(the(research(concept(vehicle((
 Testing(and(evaluation(of(fault(handling( strategies(in(the(research(concept(vehicle(( (( MikaelNybacka AssistantProfessor,KTHVehicleDynamics SwedishHybridVehicleCentre 06B2015 Summary' The development
Testing(and(evaluation(of(fault(handling( strategies(in(the(research(concept(vehicle(( (( MikaelNybacka AssistantProfessor,KTHVehicleDynamics SwedishHybridVehicleCentre 06B2015 Summary' The development
HIGH PERFORMANCE 800V E-MOTOR
 HIGH PERFORMANCE 800V E-MOTOR FOR AUTOMOTIVE APPLICATION Katrin Wand AVL Trimerics GmbH AVL SOLUTION FOR ALL CUSTOMER SEGMENTS AVL E-Drive Core Competences Powertrain Engineering E-motor EMC Passenger
HIGH PERFORMANCE 800V E-MOTOR FOR AUTOMOTIVE APPLICATION Katrin Wand AVL Trimerics GmbH AVL SOLUTION FOR ALL CUSTOMER SEGMENTS AVL E-Drive Core Competences Powertrain Engineering E-motor EMC Passenger
TRACTION CONTROL OF AN ELECTRIC FORMULA STUDENT RACING CAR
 F24-IVC-92 TRACTION CONTROL OF AN ELECTRIC FORMULA STUDENT RACING CAR Loof, Jan * ; Besselink, Igo; Nijmeijer, Henk Department of Mechanical Engineering, Eindhoven, University of Technology, KEYWORDS Traction-control,
F24-IVC-92 TRACTION CONTROL OF AN ELECTRIC FORMULA STUDENT RACING CAR Loof, Jan * ; Besselink, Igo; Nijmeijer, Henk Department of Mechanical Engineering, Eindhoven, University of Technology, KEYWORDS Traction-control,
Research Report. FD807 Electric Vehicle Component Sizing vs. Vehicle Structural Weight Report
 RD.9/175.3 Ricardo plc 9 1 FD7 Electric Vehicle Component Sizing vs. Vehicle Structural Weight Report Research Report Conducted by Ricardo for The Aluminum Association 9 - RD.9/175.3 Ricardo plc 9 2 Scope
RD.9/175.3 Ricardo plc 9 1 FD7 Electric Vehicle Component Sizing vs. Vehicle Structural Weight Report Research Report Conducted by Ricardo for The Aluminum Association 9 - RD.9/175.3 Ricardo plc 9 2 Scope
Fuzzy Architecture of Safety- Relevant Vehicle Systems
 Fuzzy Architecture of Safety- Relevant Vehicle Systems by Valentin Ivanov and Barys Shyrokau Automotive Engineering Department, Ilmenau University of Technology (Germany) 1 Content 1. Introduction 2. Fuzzy
Fuzzy Architecture of Safety- Relevant Vehicle Systems by Valentin Ivanov and Barys Shyrokau Automotive Engineering Department, Ilmenau University of Technology (Germany) 1 Content 1. Introduction 2. Fuzzy
DEVELOPMENT AND IMPLEMENTATION OF VFD ACTIVE DAMPING TO SMOOTH TORSIONAL VIBRATIONS ON A GEARED TRAIN
 DEVELOPMENT AND IMPLEMENTATION OF VFD ACTIVE DAMPING TO SMOOTH TORSIONAL VIBRATIONS ON A GEARED TRAIN L. Naldi GE Oil&Gas P. Rotondo GE Oil&Gas J. Kocur ExxonMobil 37 th Turbomachinery Symposium Talk Overview
DEVELOPMENT AND IMPLEMENTATION OF VFD ACTIVE DAMPING TO SMOOTH TORSIONAL VIBRATIONS ON A GEARED TRAIN L. Naldi GE Oil&Gas P. Rotondo GE Oil&Gas J. Kocur ExxonMobil 37 th Turbomachinery Symposium Talk Overview
Integrated Control Strategy for Torque Vectoring and Electronic Stability Control for in wheel motor EV
 EVS27 Barcelona, Spain, November 17-20, 2013 Integrated Control Strategy for Torque Vectoring and Electronic Stability Control for in wheel motor EV Haksun Kim 1, Jiin Park 2, Kwangki Jeon 2, Sungjin Choi
EVS27 Barcelona, Spain, November 17-20, 2013 Integrated Control Strategy for Torque Vectoring and Electronic Stability Control for in wheel motor EV Haksun Kim 1, Jiin Park 2, Kwangki Jeon 2, Sungjin Choi
Active Roll Control (ARC): System Design and Hardware-Inthe-Loop
: System Design and Hardware-Inthe-Loop") Active Roll Control (ARC): System Design and Hardware-Inthe-Loop Test Bench Correspondence A. SORNIOTTI, A. ORGANDO and. VELARDOCCHIA* Politecnico di Torino, Department of echanics *Corresponding author.
Active Roll Control (ARC): System Design and Hardware-Inthe-Loop Test Bench Correspondence A. SORNIOTTI, A. ORGANDO and. VELARDOCCHIA* Politecnico di Torino, Department of echanics *Corresponding author.
IMPROVED EMERGENCY BRAKING PERFORMANCE FOR HGVS
 IMPROVED EMERGENCY BRAKING PERFORMANCE FOR HGVS Dr Leon Henderson Research Associate University of Cambridge, UK lmh59@cam.ac.uk Prof. David Cebon University of Cambridge, UK dc@eng.cam.ac.uk Abstract
IMPROVED EMERGENCY BRAKING PERFORMANCE FOR HGVS Dr Leon Henderson Research Associate University of Cambridge, UK lmh59@cam.ac.uk Prof. David Cebon University of Cambridge, UK dc@eng.cam.ac.uk Abstract
Vehicle State Estimator based regenerative braking implementation on an electric vehicle to improve lateral vehicle stability.
 EVS27 Barcelona, Spain, November 17-20, 2013 Vehicle State Estimator based regenerative braking implementation on an electric vehicle to improve lateral vehicle stability. S.T.H. Jansen 1, J.J.P. van Boekel
EVS27 Barcelona, Spain, November 17-20, 2013 Vehicle State Estimator based regenerative braking implementation on an electric vehicle to improve lateral vehicle stability. S.T.H. Jansen 1, J.J.P. van Boekel
Driving Performance Improvement of Independently Operated Electric Vehicle
 EVS27 Barcelona, Spain, November 17-20, 2013 Driving Performance Improvement of Independently Operated Electric Vehicle Jinhyun Park 1, Hyeonwoo Song 1, Yongkwan Lee 1, Sung-Ho Hwang 1 1 School of Mechanical
EVS27 Barcelona, Spain, November 17-20, 2013 Driving Performance Improvement of Independently Operated Electric Vehicle Jinhyun Park 1, Hyeonwoo Song 1, Yongkwan Lee 1, Sung-Ho Hwang 1 1 School of Mechanical
Multi-ECU HiL-Systems for Virtual Characteristic Rating of Vehicle Dynamics Control Systems
 Multi-ECU HiL-Systems for Virtual Characteristic Rating of Vehicle Dynamics Control Systems Dipl.-Ing. Ronnie Dessort, M.Sc. Philipp Simon - TESIS DYNAware GmbH Dipl.-Ing. Jörg Pfau - Audi AG VDI-Conference
Multi-ECU HiL-Systems for Virtual Characteristic Rating of Vehicle Dynamics Control Systems Dipl.-Ing. Ronnie Dessort, M.Sc. Philipp Simon - TESIS DYNAware GmbH Dipl.-Ing. Jörg Pfau - Audi AG VDI-Conference
Heavy Duty Vehicles - Land
 Heavy Duty Vehicles - Land #ETI10 Welcome and Introduction HDV Project Manager David Butler Agenda Introduction and welcome Programme overview High Efficiency Selective Catalytic Reduction Project Heavy
Heavy Duty Vehicles - Land #ETI10 Welcome and Introduction HDV Project Manager David Butler Agenda Introduction and welcome Programme overview High Efficiency Selective Catalytic Reduction Project Heavy
Übersicht der VVT-Systementwicklung bei Hilite. Overview of VVT System development at Hilite
 Übersicht der VVT-Systementwicklung bei Hilite Overview of VVT System development at Hilite M.Sc. Mustafa Mohammed Simulation Engineer Business Unit Engine / Simulation Frei verwendbar Contents Company
Übersicht der VVT-Systementwicklung bei Hilite Overview of VVT System development at Hilite M.Sc. Mustafa Mohammed Simulation Engineer Business Unit Engine / Simulation Frei verwendbar Contents Company
Sponsors. Rob Parkinson. Technical Head - Driveline and Transmission Systems Ricardo UK Ltd
 Sponsors Rob Parkinson Technical Head - Driveline and Transmission Systems Ricardo UK Ltd Rapid identification of transmission layouts for lowest vehicle energy consumption Rob Parkinson Technical Head,
Sponsors Rob Parkinson Technical Head - Driveline and Transmission Systems Ricardo UK Ltd Rapid identification of transmission layouts for lowest vehicle energy consumption Rob Parkinson Technical Head,
Predictive Control Strategies using Simulink
 Example slide Predictive Control Strategies using Simulink Kiran Ravindran, Ashwini Athreya, HEV-SW, EE/MBRDI March 2014 Project Overview 2 Predictive Control Strategies using Simulink Kiran Ravindran
Example slide Predictive Control Strategies using Simulink Kiran Ravindran, Ashwini Athreya, HEV-SW, EE/MBRDI March 2014 Project Overview 2 Predictive Control Strategies using Simulink Kiran Ravindran
VT2+: Further improving the fuel economy of the VT2 transmission
 VT2+: Further improving the fuel economy of the VT2 transmission Gert-Jan Vogelaar, Punch Powertrain Abstract This paper reports the study performed at Punch Powertrain on the investigations on the VT2
VT2+: Further improving the fuel economy of the VT2 transmission Gert-Jan Vogelaar, Punch Powertrain Abstract This paper reports the study performed at Punch Powertrain on the investigations on the VT2
SPMM OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000?
 SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
EVORA 414E HYBRID. Lotus Engineering 1
 EVORA 414E HYBRID Lotus Engineering 1 EVORA 414E HYBRID Phil Barker Chief Engineer - Hybrid and Electric Vehicles Lotus Engineering AGENDA EVORA 414E HYBRID Lotus background Project overview, aims and
EVORA 414E HYBRID Lotus Engineering 1 EVORA 414E HYBRID Phil Barker Chief Engineer - Hybrid and Electric Vehicles Lotus Engineering AGENDA EVORA 414E HYBRID Lotus background Project overview, aims and
Modelling, Control, and Simulation of Electric Propulsion Systems with Electronic Differential and Induction Machines
 Modelling, Control, and Simulation of Electric Propulsion Systems with Electronic Differential and Induction Machines Francisco J. Perez-Pinal Advisor: Dr. Ciro Nunez Grainger Power Electronics and Motor
Modelling, Control, and Simulation of Electric Propulsion Systems with Electronic Differential and Induction Machines Francisco J. Perez-Pinal Advisor: Dr. Ciro Nunez Grainger Power Electronics and Motor
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
Implementation and application of Simpackmulti-attribute vehicle models at Toyota Motor Europe
 Implementation and application of Simpackmulti-attribute vehicle models at Toyota Motor Europe Ernesto Mottola, PhD. Takao Sugai Vehicle Performance Engineering Toyota Motor Europe NV/SA Technical Center
Implementation and application of Simpackmulti-attribute vehicle models at Toyota Motor Europe Ernesto Mottola, PhD. Takao Sugai Vehicle Performance Engineering Toyota Motor Europe NV/SA Technical Center
Project Overview CIDAUT. 25 October 2017
 CIDAUT 25 October 2017 1 General Figures Title: Rare earth free e-drives featuring low cost manufacturing Acronym: ReFreeDrive Grant Agreement No: 770143 Topic: GV-04-2017 Project Total Costs: 5,999,131.25
CIDAUT 25 October 2017 1 General Figures Title: Rare earth free e-drives featuring low cost manufacturing Acronym: ReFreeDrive Grant Agreement No: 770143 Topic: GV-04-2017 Project Total Costs: 5,999,131.25
ENERGY ANALYSIS OF A POWERTRAIN AND CHASSIS INTEGRATED SIMULATION ON A MILITARY DUTY CYCLE
 U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER ENERGY ANALYSIS OF A POWERTRAIN AND CHASSIS INTEGRATED SIMULATION ON A MILITARY DUTY CYCLE GT Suite User s Conference: 9 November
U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER ENERGY ANALYSIS OF A POWERTRAIN AND CHASSIS INTEGRATED SIMULATION ON A MILITARY DUTY CYCLE GT Suite User s Conference: 9 November
March th session March 16 18, 2011, Ann Arbor, USA
 March 2011 HDH informal working group HDH informal working group 5 th session March 16 18, 2011, Ann Arbor, USA Hybrid Powertrain Testing Overview Presentation of Hybrid System Development Potential Test
March 2011 HDH informal working group HDH informal working group 5 th session March 16 18, 2011, Ann Arbor, USA Hybrid Powertrain Testing Overview Presentation of Hybrid System Development Potential Test
Design and Calibration of the Jaguar XK Adaptive Cruise Control System. Tim Jagger MathWorks International Automotive Conference 2006
 Design and Calibration of the Jaguar XK Adaptive Cruise Control System Tim Jagger MathWorks International Automotive Conference 26 JAGUAR XK Page 3 ADAPTIVE CRUISE CONTROL(ACC) MODEL BASED CALIBRATION
Design and Calibration of the Jaguar XK Adaptive Cruise Control System Tim Jagger MathWorks International Automotive Conference 26 JAGUAR XK Page 3 ADAPTIVE CRUISE CONTROL(ACC) MODEL BASED CALIBRATION
Development of a Clutch Control System for a Hybrid Electric Vehicle with One Motor and Two Clutches
 Development of a Clutch Control System for a Hybrid Electric Vehicle with One Motor and Two Clutches Kazutaka Adachi*, Hiroyuki Ashizawa**, Sachiyo Nomura***, Yoshimasa Ochi**** *Nissan Motor Co., Ltd.,
Development of a Clutch Control System for a Hybrid Electric Vehicle with One Motor and Two Clutches Kazutaka Adachi*, Hiroyuki Ashizawa**, Sachiyo Nomura***, Yoshimasa Ochi**** *Nissan Motor Co., Ltd.,
Approach for determining WLTPbased targets for the EU CO 2 Regulation for Light Duty Vehicles
 Approach for determining WLTPbased targets for the EU CO 2 Regulation for Light Duty Vehicles Brussels, 17 May 2013 richard.smokers@tno.nl norbert.ligterink@tno.nl alessandro.marotta@jrc.ec.europa.eu Summary
Approach for determining WLTPbased targets for the EU CO 2 Regulation for Light Duty Vehicles Brussels, 17 May 2013 richard.smokers@tno.nl norbert.ligterink@tno.nl alessandro.marotta@jrc.ec.europa.eu Summary
MULTIBODY ANALYSIS OF THE M-346 PILOTS INCEPTORS MECHANICAL CIRCUITS INTRODUCTION
 MULTIBODY ANALYSIS OF THE M-346 PILOTS INCEPTORS MECHANICAL CIRCUITS Emanuele LEONI AERMACCHI Italy SAMCEF environment has been used to model and analyse the Pilots Inceptors (Stick/Pedals) mechanical
MULTIBODY ANALYSIS OF THE M-346 PILOTS INCEPTORS MECHANICAL CIRCUITS Emanuele LEONI AERMACCHI Italy SAMCEF environment has been used to model and analyse the Pilots Inceptors (Stick/Pedals) mechanical
Five Cool Things You Can Do With Powertrain Blockset The MathWorks, Inc. 1
 Five Cool Things You Can Do With Powertrain Blockset Mike Sasena, PhD Automotive Product Manager 2017 The MathWorks, Inc. 1 FTP75 Simulation 2 Powertrain Blockset Value Proposition Perform fuel economy
Five Cool Things You Can Do With Powertrain Blockset Mike Sasena, PhD Automotive Product Manager 2017 The MathWorks, Inc. 1 FTP75 Simulation 2 Powertrain Blockset Value Proposition Perform fuel economy
Technical Report Lotus Elan Rear Suspension The Effect of Halfshaft Rubber Couplings. T. L. Duell. Prepared for The Elan Factory.
 Technical Report - 9 Lotus Elan Rear Suspension The Effect of Halfshaft Rubber Couplings by T. L. Duell Prepared for The Elan Factory May 24 Terry Duell consulting 19 Rylandes Drive, Gladstone Park Victoria
Technical Report - 9 Lotus Elan Rear Suspension The Effect of Halfshaft Rubber Couplings by T. L. Duell Prepared for The Elan Factory May 24 Terry Duell consulting 19 Rylandes Drive, Gladstone Park Victoria
Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity
 Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity Benoit PARMENTIER, Frederic MONNERIE (PSA) Marc ALIRAND, Julien LAGNIER (LMS) Vehicle Dynamics
Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity Benoit PARMENTIER, Frederic MONNERIE (PSA) Marc ALIRAND, Julien LAGNIER (LMS) Vehicle Dynamics
Switching Control for Smooth Mode Changes in Hybrid Electric Vehicles
 Switching Control for Smooth Mode Changes in Hybrid Electric Vehicles Kerem Koprubasi (1), Eric Westervelt (2), Giorgio Rizzoni (3) (1) PhD Student, (2) Assistant Professor, (3) Professor Department of
Switching Control for Smooth Mode Changes in Hybrid Electric Vehicles Kerem Koprubasi (1), Eric Westervelt (2), Giorgio Rizzoni (3) (1) PhD Student, (2) Assistant Professor, (3) Professor Department of
Aachen Colloquium China Determination of the Functional Performance of a Series Electric Vehicle. Beijing, November 1 st - 2 nd, 2011
 Aachen Colloquium China 2011 Determination of the Functional Performance of a Series Electric Vehicle Beijing, November 1 st - 2 nd, 2011 Lutz Eckstein Roland Wohlecker René Göbbels Forschungsgesellschaft
Aachen Colloquium China 2011 Determination of the Functional Performance of a Series Electric Vehicle Beijing, November 1 st - 2 nd, 2011 Lutz Eckstein Roland Wohlecker René Göbbels Forschungsgesellschaft
VIRTUAL ELECTRIC VEHICLE
 Daniel Baumann, IT VIRTUAL ELECTRIC VEHICLE Hands-on Road Validation J. Balic, 11/2016 josko.balic@avl.com AVL List GmbH Josko Balic Product Manager System Simulation josko.balic@avl.com Confidential for
Daniel Baumann, IT VIRTUAL ELECTRIC VEHICLE Hands-on Road Validation J. Balic, 11/2016 josko.balic@avl.com AVL List GmbH Josko Balic Product Manager System Simulation josko.balic@avl.com Confidential for
ATLAS Principle to Product
 ATLAS Principle to Product SUPERGEN 26th May 2016 Wind and tidal energy control experts SgurrControl Experts in wind and tidal energy control Engineering organisation providing control solutions to wind
ATLAS Principle to Product SUPERGEN 26th May 2016 Wind and tidal energy control experts SgurrControl Experts in wind and tidal energy control Engineering organisation providing control solutions to wind
Machine Design Optimization Based on Finite Element Analysis using
 Machine Design Optimization Based on Finite Element Analysis using High-Throughput Computing Wenying Jiang T.M. Jahns T.A. Lipo WEMPEC Y. Suzuki W. Taylor. JSOL Corp. UW-Madison, CS Dept. 07/10/2014 2014
Machine Design Optimization Based on Finite Element Analysis using High-Throughput Computing Wenying Jiang T.M. Jahns T.A. Lipo WEMPEC Y. Suzuki W. Taylor. JSOL Corp. UW-Madison, CS Dept. 07/10/2014 2014
Design, Development of Dual Mass Flywheel and Comparative Testing with Conventional Flywheel
 Design, Development of Dual Mass Flywheel and Comparative Testing with Conventional Flywheel #1 N. N. Suryawanshi, #2 Prof. D. P. Bhaskar 1 nikhil23031992@gmail.com #1 Student Mechanical Engineering Department,
Design, Development of Dual Mass Flywheel and Comparative Testing with Conventional Flywheel #1 N. N. Suryawanshi, #2 Prof. D. P. Bhaskar 1 nikhil23031992@gmail.com #1 Student Mechanical Engineering Department,
Jaroslav Maly & team CAE departament. AV ENGINEERING, a.s.
 Design & Simulation of one axle trailer loading by 6 or 7 passenger cars - Virtual Product Development Jaroslav Maly & team CAE departament www.aveng.com Pro/ENGINEER design optimization of axle trailer
Design & Simulation of one axle trailer loading by 6 or 7 passenger cars - Virtual Product Development Jaroslav Maly & team CAE departament www.aveng.com Pro/ENGINEER design optimization of axle trailer
Mathematical modeling of the electric drive train of the sports car
 1 Portál pre odborné publikovanie ISSN 1338-0087 Mathematical modeling of the electric drive train of the sports car Madarás Juraj Elektrotechnika 17.09.2012 The present electric vehicles are using for
1 Portál pre odborné publikovanie ISSN 1338-0087 Mathematical modeling of the electric drive train of the sports car Madarás Juraj Elektrotechnika 17.09.2012 The present electric vehicles are using for