Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems.
|
|
|
- Lawrence McCarthy
- 6 years ago
- Views:
Transcription
1 Modeling Driver Behavior in a Connected Environment Integration of Microscopic Traffic Simulation and Telecommunication Systems Alireza Talebpour



2 Information Level Connectivity in the Modern Age Sensor Technology Everything is getting connected and users are at the center of this web of connectivity.



3 Smart Cities Vision Image Powered by Intel
4 Automated vs. Connected Vehicle Operation CONNECTIVITY No Automation Function Specific Automation Combined Function Automation Limited Self-Driving Automation Full Self-Driving Automation Improve drivers strategic and operational decisions. Vehicle-to-Vehicle (V2V) Communications Increase drivers situational awareness. Improve drivers operational decisions. Vehicle-to-Infrastructure (V2I) Communications Improve drivers strategic decisions.
5 Automated vs. Connected Vehicle Operation CONNECTIVITY No Automation Function Specific Automation Combined Function Automation Limited Self-Driving Automation Full Self-Driving Automation Enhance self-contained sensing capabilities through real-time messaging. Vehicle-to-Vehicle (V2V) Communications Improve vehicles operational decisions. Vehicle-to-Infrastructure (V2I) Communications Improve vehicles strategic decisions.


6 Applications for Connectivity Vehicle-to-Vehicle (V2V) Communications Emergency Break Light Warning Forward Collision Warning Intersection Movement Assist Blind Spot and Lane Change Warning Vehicle-to-Infrastructure (V2I) Communications Speed Harmonization Intelligent Traffic Signals Enable Traveler Information Transit Connection Incident Management Eco-Routing Smart Parking AFV Charging Stations Image Source: Lexus and Mercedes
7 Motivation Connected Vehicles technology and Vehicle Automation are two emerging technologies that will change the driving environment and consequently drivers behavior. Improvements in drivers strategic and operational decisions are expected. Improvements in mobility, safety, reliability, emissions, and comfort are expected. However, the extent of these improvements are unknown.




8 Framework Traffic Telecommunications Car-following Clustering Lane-Changing Regular Automated Regular Connected Automated Connected


9 Framework Traffic Telecommunications Car-following Clustering Lane-Changing Regular Automated Connected
10 Outline Image Source: Volvo, Lexus, and USDOT

11 Outline Image Source: Volvo, Lexus, and USDOT
12 Acceleration Framework No Automation Not Connected No Automation Connected Self-Driving Not Connected
13 Acceleration Framework Self-Driving Not Connected No Automation Connected No Automation Not Connected Acceleration Behavior: Probabilistic Perception of Surrounding Traffic Condition: Subjective Reaction Time: High Safe Spacing: High High-Risk maneuvers: Possible The car-following model of Talebpour, Hamdar, and Mahmassani (2011) is used. Probabilistic Recognizes two different driving regimes: Congested Uncongested Consider crashes endogenously Talebpour, A., Mahmassani, H., Hamdar, S., Multiregime Sequential Risk-Taking Model of CarFollowing Behavior. Transportation Research Record: Journal of the Transportation Research Board 2260,
14 Acceleration Framework Self-Driving Not Connected No Automation Connected No Automation Not Connected Active V2V Communications Inactive V2V Communications Active V2I Communications Inactive V2I Communications Acceleration Behavior: Deterministic Perception of Surrounding Traffic Condition: Accurate Reaction Time: Low Safe Spacing: Low High-Risk maneuvers: Very Unlikely The Intelligent Driver Model (Treiber, Hennecke, and Helbing, 2000) is used. Treiber, M., Hennecke, A., Helbing, D., Congested traffic states in empirical observations and microscopic simulations. Physical Review E 62(2),
15 Acceleration Framework No Automation Not Connected No Automation Connected Self-Driving Not Connected Active V2V Communications Inactive V2V Communications Active V2I Communications Inactive V2I Communications Sources of information: drivers perception and road signs Behavior is modeled similarly to the No Automation Not Connected.

16 Acceleration Framework No Automation Not Connected No Automation Connected Self-Driving Not Connected Active V2V Communications Inactive V2V Communications Active V2I Communications Inactive V2I Communications TMC can detect individual vehicle trajectories Speed harmonization Queue warning Depending on the availability of V2V Communications: Active V2V Communications: IDM Inactive V2V Communications: Talebpour, Hamdar, and Mahmassani.
17 Acceleration Framework No Automation Not Connected No Automation Connected Self-Driving Not Connected Active V2V Communications Inactive V2V Communications Active V2I Communications Inactive V2I Communications No communication between vehicle and TMC Depending on the availability of V2V Communications: Active V2V Communications: IDM Inactive V2V Communications: Talebpour, Hamdar, and Mahmassani
 with 90m±2.")
18 Acceleration Framework No Automation Not Connected No Automation Connected On-board sensors are simulated: Self-Driving Not Connected SMS Automation Radars (UMRR-00 Type 30) with 90m±2.5% detection range and ±35 degrees horizontal Field of View (FOV).

. 1. Reece, D.A., Shafer, S.A., 1993.")
, 23-50. 2. Van Arem, B.")

19 Acceleration Framework No Automation Not Connected No Automation Connected Self-Driving Not Connected Speed should be low enough so that the vehicle can react to any event outside of the sensor range (vmax ) (Reece and Shafer, and Arem, Driel, Visser, 20062). 1. Reece, D.A., Shafer, S.A., A computational model of driving for autonomous vehicles. Transportation Research Part A: Policy and Practice 27(1), Van Arem, B., van Driel, C.J.G., Visser, R., The Impact of Cooperative Adaptive Cruise Control on Traffic-Flow Characteristics. Intelligent Transportation Systems, IEEE Transactions on 7(4),
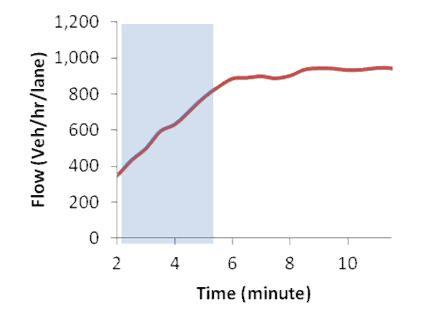
20 Throughput Analysis Simulation Segment The average breakdown flow in a series of simulations is considered as the bottleneck capacity.
21 Throughput Analysis Sensitivity Analysis Connected Vehicles 0% MPR 10% MPR 50% MPR 70% MPR 90% MPR 100% MPR
22 Throughput Analysis Sensitivity Analysis Automated Vehicles 0% MPR 10% MPR 50% MPR 70% MPR 90% MPR 100% MPR

23 Throughput Analysis Simulation Results Low market penetration rates of automated and connected vehicles do not result in a significant increase in bottleneck capacity. Automated vehicles have more positive impact on capacity compared to connected vehicles. Capacities over 3000 veh/hr/lane can be achieved by using automated vehicles. Automated, Connected, and Regular Vehicles
24 Throughput Analysis Summary Connected Vehicles / Automated vehicles: Low penetration rate increases the scatter in fundamental diagram. High penetration rate reduces the scatter in fundamental diagram. Capacity increases as market penetration rate increases. Automated vehicles have more positive impact on capacity compared to connected vehicles.
25 Stability Analysis A car-following model can be formulated as: Empirical observations suggest that there exists an equilibrium speed-spacing relationship: f ( s *,0, V ( s * )) 0, s * 0 A platoon of infinite vehicles is string stable if a perturbation from equilibrium decays as it propagates upstream.
26 Stability Analysis String Stable Platoon String Unstable Platoon
27 Stability Analysis Following the definition of string stability, the following criteria guarantees the string instability of a heterogeneous traffic flow (Ward, 2009): n 2 f n2 n n n m v f v f v f s fs 0 2 m n where Ward, J.A., Heterogeneity, Lane-Changing and Instability in Traffic: A Mathematical Approach, Department of Engineering Mathematics. University of Bristol, Bristol, United Kingdom, p. 126.
28 Stability Analysis Heterogeneous Traffic Flow Connected and Regular Vehicles Automated and Regular Vehicles At high market penetration rates, The effect of automated vehicles on stability is more significant than connected vehicles.
29 Stability Analysis Heterogeneous Traffic Flow Parameters of regular vehicles are adjusted to create a very unstable traffic flow. Low market penetration rates of automated vehicles do not result in significant stability improvements. At low market penetration rates of automated vehicles, Market penetration rate of connected vehicles Automated, Connected, and Regular Vehicles
30 Stability Analysis Simulation Results A one-lane highway with an infinite length is simulated. String Stability as a Function of Reaction Time and Platoon Size is investigated. Regular Oscillation Regime Collision Regime 10% Connected 90% Connected 10% Automated 90% Automated
31 Stability Analysis Summary The presented acceleration framework is string stable. Analytical investigations show that string stability can be improved by the addition of connected and automated vehicles. Improvements are observed at low market penetration rates of connected vehicles (unlike automated vehicles). At high market penetration rates, automated vehicles have more positive impact on stability compared to connected vehicles.
32 Stability Analysis Summary Simulation results revealed that Oscillation and collision thresholds increase as platoon size decreases. Oscillation and collision thresholds increase as market penetration rate increases. Automated vehicles have more positive impact on stability compared to connected vehicles.

33 Outline Image Source: Volvo, Lexus, and USDOT
.")
34 V2V Communications Model Background Algorithms can be categorized into two groups, Topological methods Use network topology to select nodes. Network topology changes rapidly; therefore, Topological date should be transmitted at a high rate Statistical methods Use local measures (e.g. transmission distance). Topological methods are more accurate. Clustering algorithms can be used to reduce the amount of required data transmission. Image Source: USDOT
35 V2V Communications Model Background What is a Cluster? Each cluster consists of, One cluster head Several cluster members Cluster members can only communicate with the cluster head (1-hop communication between cluster members). A cluster head can communicate with cluster members and other cluster heads from other clusters. Having stable clusters is the key to reduce signal interference.
36 V2V Communications Model Clustering 1. Hassanabadi, B., C., Shea, L., Zhang, and S., Valaee, Clustering in Vehicular Ad Hoc Networks using Affinity Propagation. Ad Hoc Networks Part B, Vol. 13, pp Frey, B.J. and D., Dueck, Clustering by Passing Messages Between Data Points, Science 315, pp
37 V2V Communications Model NS3 Implementation Network Simulator 3 (NS3) is a discrete-event communication network simulator. Dedicated Short-Range Communication (DSRC) Protocol is the standard protocol for V2V communications. DSRC interface uses 7 non-overlapping channels (Xu et al., 2012): A control channel with 1000m range. Six service channels with m range. DSRC uses The control channel to send safety packets. Service channels to send non-safety packets (e.g. Clustering information)
38 V2V Communications Model NS3 Implementation Clustering Frequency Packet size = 50 byte: Location, speed, acceleration Packet Forwarding Overhead = 10 ms (Koizumi et al., 2012)

39 V2V Communications Model NS3 Implementation Packet Delivery

40 Outline Image Source: Volvo, Lexus, and USDOT
41 SPD-HARM Simulation Definition Speed Harmonization Dynamically adjusts and coordinates maximum speed limit based on Prevailing traffic state Road surface condition Weather Objectives Avoid or delay flow breakdown by reducing speed variance Smooth out shock waves Improve flow quality and throughput Reduce delay and improve reliability Safety?

42 SPD-HARM Simulation Distance Shockwave Detection % TIME wavelet transform
43 SPD-HARM Simulation Speed Limit Selection Algorithm Based on Allaby et al. (2007) a reactive decision tree is used. Allaby, P., B. Hellinga, M. Bullock. Variable Speed Limits: Safety and Operational Impacts of a Candidate Control Strategy for Freeway Applications, IEEE Transactions on Intelligent Transportation Systems, Vol. 8, No. 4, 2007, pp

44 SPD-HARM Simulation Study Segments Hypothetical Segment 3.5 Miles Chicago 3.5 Miles Image Source: Google Maps
45 SPD-HARM Simulation Results: Hypothetical Segment 0% Compliance 10% Compliance 90% Compliance
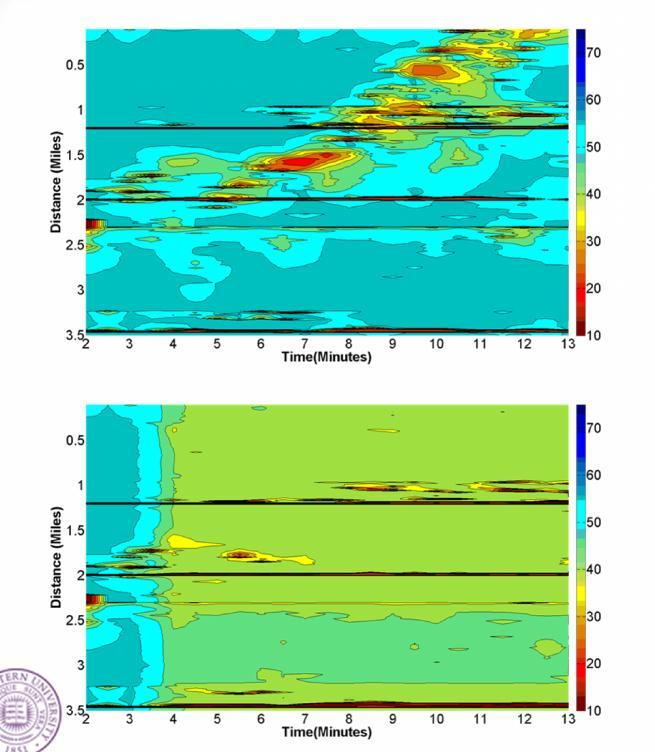
46 SPD-HARM Simulation Results: Chicago
47 Concluding Remarks An integration of a traffic simulation framework and a wireless communication simulation framework is presented. Under the assumptions of this study, mobility will improve and emissions will decrease by the addition of connected and automated vehicles. Automated vehicles are more effective compared to connected vehicles. Simulating the flow of information is essential to study the effects of connected and automated vehicles on mobility, safety, and emissions.

48 Outline Image Source: Volvo, Lexus, and USDOT




49 What is Next? There is a lot more room for improvement. There are a lot of elements to add. Image Powered by Intel


50 What is Next? New measures are required and we need to apply new data collection procedures. Image Source: USDOT

51
Traffic Operations with Connected and Automated Vehicles
 Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Traffic Operations with Connected and Automated Vehicles Xianfeng (Terry) Yang Assistant Professor Department of Civil, Construction, and Environmental Engineering San Diego State University (619) 594-1934;
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System
 System") Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Developing a Platoon-Wide Eco-Cooperative Adaptive Cruise Control (CACC) System 2017 Los Angeles Environmental Forum August 28th Ziran Wang ( 王子然 ), Guoyuan Wu, Peng Hao, Kanok Boriboonsomsin, and Matthew
Fleet Penetration of Automated Vehicles: A Microsimulation Analysis
 Fleet Penetration of Automated Vehicles: A Microsimulation Analysis Corresponding Author: Elliot Huang, P.E. Co-Authors: David Stanek, P.E. Allen Wang 2017 ITE Western District Annual Meeting San Diego,
Fleet Penetration of Automated Vehicles: A Microsimulation Analysis Corresponding Author: Elliot Huang, P.E. Co-Authors: David Stanek, P.E. Allen Wang 2017 ITE Western District Annual Meeting San Diego,
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications
 Systems: Architectures, Controls, and Applications") A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications Ziran Wang (presenter), Guoyuan Wu, and Matthew J. Barth University of California, Riverside Nov.
Connected Vehicles. V2X technology.
 EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
EN Kapsch TrafficCom Connected Vehicles. V2X technology. Cooperative Intelligent Transportation Systems (C-ITS) are based on the communication between vehicles and infrastructure (V2I, or vehicle to infrastructure
A Communication-centric Look at Automated Driving
 A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
A Communication-centric Look at Automated Driving Onur Altintas Toyota ITC Fellow Toyota InfoTechnology Center, USA, Inc. November 5, 2016 IEEE 5G Summit Seattle Views expressed in this talk do not necessarily
PERFORMANCE BENEFITS OF CONNECTED VEHICLES FOR IMPLEMENTING SPEED HARMONIZATION
 PERFORMANCE BENEFITS OF CONNECTED VEHICLES FOR IMPLEMENTING SPEED HARMONIZATION Richard Dowling, Brandon Nevers, Anxi Jia, Alexander Skabardonis Kittelson & Associates Cory Krause, Meenakshy Vasudevan
PERFORMANCE BENEFITS OF CONNECTED VEHICLES FOR IMPLEMENTING SPEED HARMONIZATION Richard Dowling, Brandon Nevers, Anxi Jia, Alexander Skabardonis Kittelson & Associates Cory Krause, Meenakshy Vasudevan
Connected Vehicles for Safety
 Connected Vehicles for Safety Shelley Row Director Intelligent Transportation Systems Joint Program Office Research and Innovative Technology Administration, USDOT The Problem Safety 32,788 highway deaths
Connected Vehicles for Safety Shelley Row Director Intelligent Transportation Systems Joint Program Office Research and Innovative Technology Administration, USDOT The Problem Safety 32,788 highway deaths
Assessment of ACC and CACC systems using SUMO
 SUMO User Conference 2018 Simulating Autonomous and Intermodal Transport Systems Assessment of ACC and CACC systems using SUMO Center for Research & Technology Hellas, Hellenic Institute of Transport Kallirroi
SUMO User Conference 2018 Simulating Autonomous and Intermodal Transport Systems Assessment of ACC and CACC systems using SUMO Center for Research & Technology Hellas, Hellenic Institute of Transport Kallirroi
What do autonomous vehicles mean to traffic congestion and crash? Network traffic flow modeling and simulation for autonomous vehicles
 What do autonomous vehicles mean to traffic congestion and crash? Network traffic flow modeling and simulation for autonomous vehicles FINAL RESEARCH REPORT Sean Qian (PI), Shuguan Yang (RA) Contract No.
What do autonomous vehicles mean to traffic congestion and crash? Network traffic flow modeling and simulation for autonomous vehicles FINAL RESEARCH REPORT Sean Qian (PI), Shuguan Yang (RA) Contract No.
Eco-Signal Operations Concept of Operations
 Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
Eco-Signal Operations Concept of Operations Applications for the Environment: Real-Time Information Synthesis (AERIS) Adapted from the Eco-Signal Operations Concept of Operations Document AERIS Operational
Assessment of ACC and CACC systems using SUMO
 EPiC Series in Engineering Volume 2, 2018, Pages 82 93 SUMO 2018- Simulating Autonomous and Intermodal Transport Systems Engineering Assessment of ACC and CACC systems using SUMO Kallirroi N. Porfyri 1,
EPiC Series in Engineering Volume 2, 2018, Pages 82 93 SUMO 2018- Simulating Autonomous and Intermodal Transport Systems Engineering Assessment of ACC and CACC systems using SUMO Kallirroi N. Porfyri 1,
Cooperative Autonomous Driving and Interaction with Vulnerable Road Users
 9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
9th Workshop on PPNIV Keynote Cooperative Autonomous Driving and Interaction with Vulnerable Road Users Miguel Ángel Sotelo miguel.sotelo@uah.es Full Professor University of Alcalá (UAH) SPAIN 9 th Workshop
Cooperative brake technology
 Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT
 The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT 20-11-18 1 Index 01 Abertis Autopistas 02 Introduction 03 Road map AV 04 INFRAMIX project 05 Test site autopistas 06 Classification
The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT 20-11-18 1 Index 01 Abertis Autopistas 02 Introduction 03 Road map AV 04 INFRAMIX project 05 Test site autopistas 06 Classification
Jalil Kianfar, Ph.D. Assistant Professor of Civil Engineering
 Jalil Kianfar, Ph.D. Assistant Professor of Civil Engineering Parks College of Engineering, Aviation and Technology Saint Louis University 3450 Lindell Blvd, Rm 2037 St. Louis, MO 63103 Phone (314) 977-8271
Jalil Kianfar, Ph.D. Assistant Professor of Civil Engineering Parks College of Engineering, Aviation and Technology Saint Louis University 3450 Lindell Blvd, Rm 2037 St. Louis, MO 63103 Phone (314) 977-8271
Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations
: Challenges and Opportunities for Traffic Operations") NTUA Seminar Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations Toronto, 1959 Los Angeles, 2009 Alexander Skabardonis NTUA 1977, University of California, Berkeley
NTUA Seminar Connected and Automated Vehicles (CAVs): Challenges and Opportunities for Traffic Operations Toronto, 1959 Los Angeles, 2009 Alexander Skabardonis NTUA 1977, University of California, Berkeley
Advanced Traffic Management on Arterial Corridors with Connected and Automated Vehicles
 Advanced Traffic Management on Arterial Corridors with Connected and Automated Vehicles Outline: November 18, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental Research and Technology
Advanced Traffic Management on Arterial Corridors with Connected and Automated Vehicles Outline: November 18, 2015 Matthew Barth Yeager Families Chair Director, Center for Environmental Research and Technology
An Introduction to Automated Vehicles
 An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
An Introduction to Automated Vehicles Grant Zammit Operations Team Manager Office of Technical Services - Resource Center Federal Highway Administration at the Purdue Road School - Purdue University West
Effects of Cooperative Adaptive Cruise Control on Traffic Flow Stability
 Effects of Cooperative Adaptive Cruise Control on Traffic Flow Stability Wouter J. Schakel, Bart van Arem, Member, IEEE, and Bart D. Netten Abstract We assess the effects of Cooperative Adaptive Cruise
Effects of Cooperative Adaptive Cruise Control on Traffic Flow Stability Wouter J. Schakel, Bart van Arem, Member, IEEE, and Bart D. Netten Abstract We assess the effects of Cooperative Adaptive Cruise
Beyond ATC and ITS Standards. Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco
 Beyond ATC and ITS Standards Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco May, 2014 Signal Control is only the beginning Connected Vehicles Automated Vehicles Infrastructure Data: Fully Connected
Beyond ATC and ITS Standards Edward Fok USDOT/FHWA - RESOURCE CENTER San Francisco May, 2014 Signal Control is only the beginning Connected Vehicles Automated Vehicles Infrastructure Data: Fully Connected
APCO International. Emerging Technology Forum
 APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
APCO International Emerging Technology Forum Emerging Vehicle to Vehicle, Vehicle to Infrastructure Communications Cars talking to each other and talking to the supporting highway infrastructure The Regulatory
C-ITS status in Europe and Outlook
 C-ITS status in Europe and Outlook Car 2 Car Communication Consortium ITU Seminar 7 th June 2018 Car 2 Car Communication Consortium Communication Technology Basis ITS-G5 Dedicated Short-Range Communication
C-ITS status in Europe and Outlook Car 2 Car Communication Consortium ITU Seminar 7 th June 2018 Car 2 Car Communication Consortium Communication Technology Basis ITS-G5 Dedicated Short-Range Communication
TRAFFIC CONTROL. in a Connected Vehicle World
 TRAFFIC CONTROL in a Connected Vehicle World Preparing for the advent of Connected Vehicles and their impact on traffic management and signalized intersection control. Frank Provenzano, Director of Business
TRAFFIC CONTROL in a Connected Vehicle World Preparing for the advent of Connected Vehicles and their impact on traffic management and signalized intersection control. Frank Provenzano, Director of Business
Improving moving jam detection performance. with V2I communication
 Improving moving jam detection performance with V2I communication Bart Netten Senior Researcher, TNO Oude Waalsdorperweg 63, 2597 AK The Hague, The Netherlands, +31 888 666 310, bart.netten@tno.nl Andreas
Improving moving jam detection performance with V2I communication Bart Netten Senior Researcher, TNO Oude Waalsdorperweg 63, 2597 AK The Hague, The Netherlands, +31 888 666 310, bart.netten@tno.nl Andreas
Automation is in the Eye of the Beholder: How it Might be Viewed by the Traffic Engineer
 Automation is in the Eye of the Beholder: How it Might be Viewed by the Traffic Engineer ITE and ITSA Luncheon, Oakland, March 20, 2014 Jim Misener, jmisener@gmail.com 415.335.9252 Agenda Connected Vehicles
Automation is in the Eye of the Beholder: How it Might be Viewed by the Traffic Engineer ITE and ITSA Luncheon, Oakland, March 20, 2014 Jim Misener, jmisener@gmail.com 415.335.9252 Agenda Connected Vehicles
G4 Apps. Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013
 Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
Intelligent Vehicles ITS Canada ATMS Detection Webinar June 13, 2013 Reducing costs, emissions. Improving mobility, efficiency. Safe Broadband Wireless Operations Fusion: Vehicles-Agencies Technologies,
Development of Fuel-Efficient Driving Strategies for Adaptive Cruise Control
 Development of Fuel-Efficient Driving Strategies for Adaptive Cruise Control Mohammad Mamouei*, Ioannis Kaparias, George Halikias School of Engineering and Mathematical Sciences, City University London
Development of Fuel-Efficient Driving Strategies for Adaptive Cruise Control Mohammad Mamouei*, Ioannis Kaparias, George Halikias School of Engineering and Mathematical Sciences, City University London
Energy and Automation Workshop E1: Impacts of Connectivity and Automation on Vehicle Operations
 Energy and Automation Workshop E1: Impacts of Connectivity and Automation on Vehicle Operations Ben Saltsman Engineering Manager Intelligent Truck, Vehicle Technology & Innovation April 23, 2014 Comprehensive
Energy and Automation Workshop E1: Impacts of Connectivity and Automation on Vehicle Operations Ben Saltsman Engineering Manager Intelligent Truck, Vehicle Technology & Innovation April 23, 2014 Comprehensive
Automated Vehicles: Terminology and Taxonomy
 Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
Automated Vehicles: Terminology and Taxonomy Taxonomy Working Group Presented by: Steven E. Shladover University of California PATH Program 1 Outline Definitions: Autonomy and Automation Taxonomy: Distribution
V2V Advancements in the last 12 months. CAMP and related activities
 V2V Advancements in the last 12 months CAMP and related activities Mike Shulman, Ford April 22, 2014 Connected Transportation Environment: Future Vision Mobility Safety Environment Global Gridlock 2 US:
V2V Advancements in the last 12 months CAMP and related activities Mike Shulman, Ford April 22, 2014 Connected Transportation Environment: Future Vision Mobility Safety Environment Global Gridlock 2 US:
Performance Evaluation of Emergency Messaging via Wireless Collision Avoidance Systems for Improved Traffic Safety in VANET
 Performance Evaluation of Emergency Messaging via Wireless Collision Avoidance Systems for Improved Traffic Safety in VANET Prema G Electronics and communication Mepco Schlenk Engineering College Sivakasi,
Performance Evaluation of Emergency Messaging via Wireless Collision Avoidance Systems for Improved Traffic Safety in VANET Prema G Electronics and communication Mepco Schlenk Engineering College Sivakasi,
5G V2X. The automotive use-case for 5G. Dino Flore 5GAA Director General
 5G V2X The automotive use-case for 5G Dino Flore 5GAA Director General WHY According to WHO, there were about 1.25 million road traffic fatalities worldwide in 2013, with another 20 50 million injured
5G V2X The automotive use-case for 5G Dino Flore 5GAA Director General WHY According to WHO, there were about 1.25 million road traffic fatalities worldwide in 2013, with another 20 50 million injured
Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow
 See discussions, stats, and author profiles for this publication at: http://www.researchgate.net/publication/266391703 Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow Impacts of
See discussions, stats, and author profiles for this publication at: http://www.researchgate.net/publication/266391703 Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow Impacts of
Modeling Multi-Objective Optimization Algorithms for Autonomous Vehicles to Enhance Safety and Energy Efficiency
 2015 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING & SIMULATION, TESTING AND VALIDATION (MSTV) TECHNICAL SESSION AUGUST 4-6, 2015 - NOVI, MICHIGAN Modeling Multi-Objective Optimization
2015 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM MODELING & SIMULATION, TESTING AND VALIDATION (MSTV) TECHNICAL SESSION AUGUST 4-6, 2015 - NOVI, MICHIGAN Modeling Multi-Objective Optimization
Reducing Greenhouse Gas Emissions through Intelligent Transportation System Solutions. June 1, 2016
 Reducing Greenhouse Gas Emissions through Intelligent Transportation System Solutions June 1, 2016 NCST UNIVERSITY PARTNERS TRANSFORMING THE TRANSPORTATION SYSTEM RESEARCH Producing state of knowledge
Reducing Greenhouse Gas Emissions through Intelligent Transportation System Solutions June 1, 2016 NCST UNIVERSITY PARTNERS TRANSFORMING THE TRANSPORTATION SYSTEM RESEARCH Producing state of knowledge
Tenk om bilene ikke kolliderer lenger
 Tenk om bilene ikke kolliderer lenger Teknologidagene 2015 C-ITS 22 September 2015 Niels Peter Skov Andersen General Manager, CAR 2 CAR Communication Consortium What if we could stop the cars colliding
Tenk om bilene ikke kolliderer lenger Teknologidagene 2015 C-ITS 22 September 2015 Niels Peter Skov Andersen General Manager, CAR 2 CAR Communication Consortium What if we could stop the cars colliding
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications
 Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
Hardware-in-the-Loop Testing of Connected and Automated Vehicle Applications Jiaqi Ma Assistant Professor University of Cincinnati ITS Midwest Annual Meeting Columbus, Ohio, September 29, 2017 Outline
AGENT-BASED MODELING, SIMULATION, AND CONTROL SOME APPLICATIONS IN TRANSPORTATION
 AGENT-BASED MODELING, SIMULATION, AND CONTROL SOME APPLICATIONS IN TRANSPORTATION Montasir Abbas, Virginia Tech (with contributions from past and present VT-SCORES students, including: Zain Adam, Sahar
AGENT-BASED MODELING, SIMULATION, AND CONTROL SOME APPLICATIONS IN TRANSPORTATION Montasir Abbas, Virginia Tech (with contributions from past and present VT-SCORES students, including: Zain Adam, Sahar
ilcas: Intelligent Lane Changing Advisory System using Connected Vehicle Technology
 ilcas: Intelligent Lane Changing Advisory System using Connected Vehicle Technology Connected Vehicles Technology Challenge Raj Kishore (Kamalanathsharma) rkishore@vt.edu EXECUTIVE SUMMARY Connected Vehicles
ilcas: Intelligent Lane Changing Advisory System using Connected Vehicle Technology Connected Vehicles Technology Challenge Raj Kishore (Kamalanathsharma) rkishore@vt.edu EXECUTIVE SUMMARY Connected Vehicles
Intersection Vehicle Cooperative Eco-Driving in the Context of Partially Connected Vehicle Environment
 Intersection Vehicle Cooperative Eco-Driving in the Context of Partially Connected Vehicle Environment M.A.S. Kamal, S. Taguchi and T. Yoshimura Abstract Vehicles with communication functionality are appearing
Intersection Vehicle Cooperative Eco-Driving in the Context of Partially Connected Vehicle Environment M.A.S. Kamal, S. Taguchi and T. Yoshimura Abstract Vehicles with communication functionality are appearing
Dr. Mohamed Abdel-Aty, P.E. Connected-Autonomous Vehicles (CAV): Background and Opportunities. Trustee Chair
: Background and Opportunities. Trustee Chair") Connected-Autonomous Vehicles (CAV): Background and Opportunities Dr. Mohamed Abdel-Aty, P.E. Trustee Chair Pegasus Professor Chair, Dept. of Civil, Environmental & Construction Engineering University
Connected-Autonomous Vehicles (CAV): Background and Opportunities Dr. Mohamed Abdel-Aty, P.E. Trustee Chair Pegasus Professor Chair, Dept. of Civil, Environmental & Construction Engineering University
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY
 ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS, CYBER SECURITY, SHARED MOBILITY Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards
MAVEN (Managing Automated Vehicles Enhances Network) MAVEN use cases. Ondřej Přibyl Czech Technical University in Prague
 MAVEN use cases. Ondřej Přibyl Czech Technical University in Prague") MAVEN (Managing Automated Vehicles Enhances Network) MAVEN use cases Ondřej Přibyl Czech Technical University in Prague Stakeholder Workshop Barcelona 1 Agenda 1. Definition of MAVEN scope 2. Presentation
MAVEN (Managing Automated Vehicles Enhances Network) MAVEN use cases Ondřej Přibyl Czech Technical University in Prague Stakeholder Workshop Barcelona 1 Agenda 1. Definition of MAVEN scope 2. Presentation
Research Challenges for Automated Vehicles
 Research Challenges for Automated Vehicles Steven E. Shladover, Sc.D. University of California, Berkeley October 10, 2005 1 Overview Reasons for automating vehicles How automation can improve efficiency
Research Challenges for Automated Vehicles Steven E. Shladover, Sc.D. University of California, Berkeley October 10, 2005 1 Overview Reasons for automating vehicles How automation can improve efficiency
Measuring Autonomous Vehicle Impacts on Congested Networks Using Simulation
 0 Measuring Autonomous Vehicle Impacts on Congested Networks Using Simulation Corresponding Author: David Stanek, PE Fehr & Peers 0 K Street, rd Floor, Sacramento, CA Tel: () -; Fax: () -0; Email: D.Stanek@fehrandpeers.com
0 Measuring Autonomous Vehicle Impacts on Congested Networks Using Simulation Corresponding Author: David Stanek, PE Fehr & Peers 0 K Street, rd Floor, Sacramento, CA Tel: () -; Fax: () -0; Email: D.Stanek@fehrandpeers.com
AUTONOMOUS VEHICLE SYSTEMS AND A CONNECTED FUTURE
 AUTONOMOUS VEHICLE SYSTEMS AND A CONNECTED FUTURE IoT Summit RWW 2018 SERGIO PACHECO SYSTEMS AND APPLICATIONS INFOTAINMENT AND DRIVER ASSISTANCE PUBLIC USE LEVELS OF AUTONOMATION IN CARS Level 0-2 Human
AUTONOMOUS VEHICLE SYSTEMS AND A CONNECTED FUTURE IoT Summit RWW 2018 SERGIO PACHECO SYSTEMS AND APPLICATIONS INFOTAINMENT AND DRIVER ASSISTANCE PUBLIC USE LEVELS OF AUTONOMATION IN CARS Level 0-2 Human
Connect & Drive: design and evaluation of cooperative adaptive cruise control for congestion reduction
 Journal of Modern Transportation Volume 19, Number 3, September 211, Page 27-213 Journal homepage: jmt.swjtu.edu.cn DOI: 1.17/BF33276 Connect & Drive: design and evaluation of cooperative adaptive cruise
Journal of Modern Transportation Volume 19, Number 3, September 211, Page 27-213 Journal homepage: jmt.swjtu.edu.cn DOI: 1.17/BF33276 Connect & Drive: design and evaluation of cooperative adaptive cruise
18th ICTCT Workshop, Helsinki, October Technical feasibility of safety related driving assistance systems
 18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
Syslog Technologies Innovative Thoughts
 CO-OPERATIVE ADAPTIVE CRUISE CONTROL (CACC) BASED ON CAN PROTOCOL USING MICROCHIP ABSTRACT Intelligent vehicle cooperation based on reliable communication systems contributes not only to reducing traffic
CO-OPERATIVE ADAPTIVE CRUISE CONTROL (CACC) BASED ON CAN PROTOCOL USING MICROCHIP ABSTRACT Intelligent vehicle cooperation based on reliable communication systems contributes not only to reducing traffic
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS
 EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
EMERGING TRENDS IN AUTOMOTIVE ACTIVE-SAFETY APPLICATIONS Purnendu Sinha, Ph.D. Global General Motors R&D India Science Lab, GM Tech Center (India) Bangalore OUTLINE OF THE TALK Introduction Landscape of
Nathaniel Karl Bailey SEPTEMBER 2016
 Simulation and Queueing Network Model Formulation of Mixed and Non-automated Traffic in Urban Settings Automated by Nathaniel Karl Bailey B.S. Industrial Engineering and Operations Research University
Simulation and Queueing Network Model Formulation of Mixed and Non-automated Traffic in Urban Settings Automated by Nathaniel Karl Bailey B.S. Industrial Engineering and Operations Research University
Activity-Travel Behavior Impacts of Driverless Cars
 January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
January 12-16, 2014; Washington, D.C. 93 rd Annual Meeting of the Transportation Research Board Activity-Travel Behavior Impacts of Driverless Cars Ram M. Pendyala 1 and Chandra R. Bhat 2 1 School of Sustainable
EPSRC-JLR Workshop 9th December 2014 TOWARDS AUTONOMY SMART AND CONNECTED CONTROL
 EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
Automated Driving - Object Perception at 120 KPH Chris Mansley
 IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
IROS 2014: Robots in Clutter Workshop Automated Driving - Object Perception at 120 KPH Chris Mansley 1 Road safety influence of driver assistance 100% Installation rates / road fatalities in Germany 80%
Innovative Technology in Construction and Work Zone Safety
 Innovative Technology in Construction and Work Zone Safety Andy Schaudt, M.S. August 3 rd, 2011 Research Associate, Advanced Systems and Applications Virginia Tech Transportation Institute Leader in transportation
Innovative Technology in Construction and Work Zone Safety Andy Schaudt, M.S. August 3 rd, 2011 Research Associate, Advanced Systems and Applications Virginia Tech Transportation Institute Leader in transportation
Mitigating Congestion at Sags with Adaptive Cruise Control Systems
 Mitigating Congestion at Sags with Adaptive Cruise Control Systems Alexandros E. Papacharalampous, Meng Wang, Victor L. Knoop, Bernat Goñi Ros, Toshimichi Takahashi, Ichiro Sakata, Bart van Arem, Member,
Mitigating Congestion at Sags with Adaptive Cruise Control Systems Alexandros E. Papacharalampous, Meng Wang, Victor L. Knoop, Bernat Goñi Ros, Toshimichi Takahashi, Ichiro Sakata, Bart van Arem, Member,
Track: Data and Innovation
 MEET THE JETSONS Track: Data and Innovation In the not so distant future, connected and autonomous vehicles will change the way we travel, with impacts for cities, transportation agencies, and YOU. What
MEET THE JETSONS Track: Data and Innovation In the not so distant future, connected and autonomous vehicles will change the way we travel, with impacts for cities, transportation agencies, and YOU. What
IMPROVING TRAVEL TIMES FOR EMERGENCY RESPONSE VEHICLES: TRAFFIC CONTROL STRATEGIES BASED ON CONNECTED VEHICLES TECHNOLOGIES
 IMPROVING TRAVEL TIMES FOR EMERGENCY RESPONSE VEHICLES: TRAFFIC CONTROL STRATEGIES BASED ON CONNECTED VEHICLES TECHNOLOGIES Final Report Craig Jordan, Mecit Cetin September 2014 DISCLAIMER The contents
IMPROVING TRAVEL TIMES FOR EMERGENCY RESPONSE VEHICLES: TRAFFIC CONTROL STRATEGIES BASED ON CONNECTED VEHICLES TECHNOLOGIES Final Report Craig Jordan, Mecit Cetin September 2014 DISCLAIMER The contents
Near-Term Automation Issues: Use Cases and Standards Needs
 Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Agenda 9:00 Welcoming remarks 9:05 Near-Term Automation Issues: Use Cases and Standards Needs 9:40 New Automation Initiative in Korea 9:55 Infrastructure Requirements for Automated Driving Systems 10:10
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help?
 Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Autonomous cars navigation on roads opened to public traffic: How can infrastructure-based systems help? Philippe Bonnifait Professor at the Université de Technologie de Compiègne, Sorbonne Universités
Traffic Management through C-ITS and Automation: a perspective from the U.S.
 Traffic Management through C-ITS and Automation: a perspective from the U.S. Matthew Barth University of California-Riverside Yeager Families Professor Director, Center for Environmental Research and Technology
Traffic Management through C-ITS and Automation: a perspective from the U.S. Matthew Barth University of California-Riverside Yeager Families Professor Director, Center for Environmental Research and Technology
Revolutionizing Our Roadways
 TRANSPORTATION Policy Research CENTER Revolutionizing Our Roadways Modeling the Traffic Impacts from Automated and Connected Vehicles in a Complex, Congested Urban Setting TRANSPORTATION Policy Research
TRANSPORTATION Policy Research CENTER Revolutionizing Our Roadways Modeling the Traffic Impacts from Automated and Connected Vehicles in a Complex, Congested Urban Setting TRANSPORTATION Policy Research
Convergence: Connected and Automated Mobility
 Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
Convergence: Connected and Automated Mobility Peter Sweatman Principal, CAVita LLC, Anaheim CA AASHTO CTE Denver June 19, 2018 1 Agenda New technology in mobility: CV, AV and CAV The transformational dynamic
EB TechPaper. Staying in lane on highways with EB robinos. elektrobit.com
 EB TechPaper Staying in lane on highways with EB robinos elektrobit.com Highly automated driving (HAD) raises the complexity within vehicles tremendously due to many different components that need to be
EB TechPaper Staying in lane on highways with EB robinos elektrobit.com Highly automated driving (HAD) raises the complexity within vehicles tremendously due to many different components that need to be
CONNECTED AUTOMATION HOW ABOUT SAFETY?
 CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
CONNECTED AUTOMATION HOW ABOUT SAFETY? Bastiaan Krosse EVU Symposium, Putten, 9 th of September 2016 TNO IN FIGURES Founded in 1932 Centre for Applied Scientific Research Focused on innovation for 5 societal
TOWARDS ACCIDENT FREE DRIVING
 ETSI SUMMIT: 5G FROM MYTH TO REALITY TOWARDS ACCIDENT FREE DRIVING Niels Peter Skov Andersen, General Manager Car 2 Car Communication Consortium All rights reserved How do we stop the cars colliding First
ETSI SUMMIT: 5G FROM MYTH TO REALITY TOWARDS ACCIDENT FREE DRIVING Niels Peter Skov Andersen, General Manager Car 2 Car Communication Consortium All rights reserved How do we stop the cars colliding First
Brignolo Roberto, CRF ETSI Workshop Feb, , Sophia Antipolis
 SAFESPOT Integrated Project Co-operative operative Systems for Road Safety Smart Vehicles on Smart Roads Brignolo Roberto, CRF Roberto.Brignolo@crf.it 1 General figures Project type: Integrated Project
SAFESPOT Integrated Project Co-operative operative Systems for Road Safety Smart Vehicles on Smart Roads Brignolo Roberto, CRF Roberto.Brignolo@crf.it 1 General figures Project type: Integrated Project
Safe, comfortable and eco-friendly, Smart Connected Society
 Safe, comfortable and eco-friendly, Smart Connected Society Big data Traffic Management Centre Traffic Management for CASE Telematics Centre Energy Management for EV mrong-way detection Safety Support
Safe, comfortable and eco-friendly, Smart Connected Society Big data Traffic Management Centre Traffic Management for CASE Telematics Centre Energy Management for EV mrong-way detection Safety Support
The connected vehicle is the better vehicle!
 AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
AVL Tagung Graz, June 8 th 2018 Dr. Rolf Bulander 1 Bosch GmbH 2018. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications
The Future of Transit and Autonomous Vehicle Technology. APTA Emerging Leaders Program May 2018
 The Future of Transit and Autonomous Vehicle Technology APTA Emerging Leaders Program May 2018 APTA Emerging Leaders Program Team 3 Nick Davidson Transportation Planning Manager Stark Area RTA - Canton,
The Future of Transit and Autonomous Vehicle Technology APTA Emerging Leaders Program May 2018 APTA Emerging Leaders Program Team 3 Nick Davidson Transportation Planning Manager Stark Area RTA - Canton,
ADAPTIVE CRUISE CONTROL AND COOPERATIVE CRUISE CONTROL IN REAL LIFE TRAFFIC SITUATION
 International Journal of Mechanical Engineering and Technology (IJMET) Volume 9, Issue 13, December 2018, pp. 578 585, Article ID: IJMET_09_13_060 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=9&itype=13
International Journal of Mechanical Engineering and Technology (IJMET) Volume 9, Issue 13, December 2018, pp. 578 585, Article ID: IJMET_09_13_060 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijmet&vtype=9&itype=13
INFLUENCE OF VARIABLE SPEED LIMIT AND DRIVER INFORMATION SYSTEM ON KEY TRAFFIC FLOW PARAMETERS ON A GERMAN AUTOBAHN
 INFLUENCE OF VARIABLE SPEED LIMIT AND DRIVER INFORMATION SYSTEM ON KEY TRAFFIC FLOW PARAMETERS ON A GERMAN AUTOBAHN Steven Boice 1*, Robert L. Bertini 1, Soyoung Ahn 1, and Klaus Bogenberger 2 1 Department
INFLUENCE OF VARIABLE SPEED LIMIT AND DRIVER INFORMATION SYSTEM ON KEY TRAFFIC FLOW PARAMETERS ON A GERMAN AUTOBAHN Steven Boice 1*, Robert L. Bertini 1, Soyoung Ahn 1, and Klaus Bogenberger 2 1 Department
Intelligent Vehicle Systems
 Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
Intelligent Vehicle Systems Southwest Research Institute Public Agency Roles for a Successful Autonomous Vehicle Deployment Amit Misra Manager R&D Transportation Management Systems 1 Motivation for This
An Innovative Approach
 Traffic Flow Theory and its Applications in Urban Environments An Innovative Approach Presented by Dr. Jin Cao 30.01.18 1 Traffic issues in urban environments Pedestrian 30.01.18 Safety Environment 2 Traffic
Traffic Flow Theory and its Applications in Urban Environments An Innovative Approach Presented by Dr. Jin Cao 30.01.18 1 Traffic issues in urban environments Pedestrian 30.01.18 Safety Environment 2 Traffic
Autonomous Automated and Connected Vehicles
 Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Autonomous Automated and Connected Vehicles February 25, 2015 Bernard C. Soriano, Ph.D. Deputy Director, California DMV California Legislation Senate Bill 1298 As soon as practicable, but no later than
Autonomous Driving by Audi. Dr. Miklós Kiss
 Autonomous Driving by Audi Dr. Miklós Kiss Milestones in future mobility Digitalisation Urbanisation Sustainability Piloted driving as an influence on megatrends 1 Enhanced safety 3 More comfort for the
Autonomous Driving by Audi Dr. Miklós Kiss Milestones in future mobility Digitalisation Urbanisation Sustainability Piloted driving as an influence on megatrends 1 Enhanced safety 3 More comfort for the
China Intelligent Connected Vehicle Technology Roadmap 1
 China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
China Intelligent Connected Vehicle Technology Roadmap 1 Source: 1. China Automotive Engineering Institute, , Oct. 2016 1 Technology Roadmap 1 General
Hardware-In-the-Loop (HIL) Testbed for Evaluating Connected Vehicle Applications
 Testbed for Evaluating Connected Vehicle Applications") Hardware-In-the-Loop (HIL) Testbed for Evaluating Connected Vehicle Applications Department of Mechanical Engineering University of Minnesota Project Members : Mohd Azrin Mohd Zulkefli Pratik Mukherjee
Hardware-In-the-Loop (HIL) Testbed for Evaluating Connected Vehicle Applications Department of Mechanical Engineering University of Minnesota Project Members : Mohd Azrin Mohd Zulkefli Pratik Mukherjee
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
The Role of Intelligent Transport Systems in Road Safety and Logistics
 The Role of Intelligent Transport Systems in Road Safety and Logistics Mike van Tonder Aurecon and President ITS SA PRESENTATION CONTENT 1. What are Intelligent Transport Systems (ITS)? 2. What Types of
The Role of Intelligent Transport Systems in Road Safety and Logistics Mike van Tonder Aurecon and President ITS SA PRESENTATION CONTENT 1. What are Intelligent Transport Systems (ITS)? 2. What Types of
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS
 ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS Bill Visnic Editorial Director, Mobility Media 2017 FAV Summit ACES Policies and Standards Breakout Session Wednesday,
ADVANCED DRIVER ASSISTANCE SYSTEMS, CONNECTED VEHICLE AND DRIVING AUTOMATION STANDARDS Bill Visnic Editorial Director, Mobility Media 2017 FAV Summit ACES Policies and Standards Breakout Session Wednesday,
Efficiency Matters for Mobility. Presented at A3PS ECO MOBILITY 2018 Vienna, Austria November 12 th and 13 th, 2018
 Efficiency Matters for Mobility High-Performance, Ann M. Schlenker Agent-Based Director, Simulation Center for of Transportation Travelers Research and Transportation Argonne National Laboratory Systems
Efficiency Matters for Mobility High-Performance, Ann M. Schlenker Agent-Based Director, Simulation Center for of Transportation Travelers Research and Transportation Argonne National Laboratory Systems
CSE 352: Self-Driving Cars. Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark
 CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
CSE 352: Self-Driving Cars Team 14: Abderrahman Dandoune Billy Kiong Paul Chan Xiqian Chen Samuel Clark Self-Driving car History Self-driven cars experiments started at the early 20th century around 1920.
2016 Congestion Report
 2016 Congestion Report Metropolitan Freeway System May 2017 2016 Congestion Report 1 Table of Contents Purpose and Need...3 Introduction...3 Methodology...4 2016 Results...5 Explanation of Percentage Miles
2016 Congestion Report Metropolitan Freeway System May 2017 2016 Congestion Report 1 Table of Contents Purpose and Need...3 Introduction...3 Methodology...4 2016 Results...5 Explanation of Percentage Miles
Traffic Management for the 21 st Century
 Traffic Management for the 21 st Century Dr. Markos Papageorgiou Professor Technical University of Crete Chania, Greece #TrafficSolutions Traffic Management for the 21 st Century Prof. Markos Papageorgiou
Traffic Management for the 21 st Century Dr. Markos Papageorgiou Professor Technical University of Crete Chania, Greece #TrafficSolutions Traffic Management for the 21 st Century Prof. Markos Papageorgiou
Public transport traffic management systems simulation in Craiova city
 Public transport traffic management systems simulation in Craiova city Ilie Dumitru Assoc Prof, University of Craiova, Faculty of Mechanics, Romania Dumitru Nicolae Prof, University of Craiova, Faculty
Public transport traffic management systems simulation in Craiova city Ilie Dumitru Assoc Prof, University of Craiova, Faculty of Mechanics, Romania Dumitru Nicolae Prof, University of Craiova, Faculty
D.J.Kulkarni, Deputy Director, ARAI
 D.J.Kulkarni, Deputy Director, ARAI Why advanced ITS and Safety Systems? Building Ideal Vehicles Safer & More comfortable Why Advanced ITS & Safety Systems? contd. Insert Road Accident Deaths graph from
D.J.Kulkarni, Deputy Director, ARAI Why advanced ITS and Safety Systems? Building Ideal Vehicles Safer & More comfortable Why Advanced ITS & Safety Systems? contd. Insert Road Accident Deaths graph from
Smart Control for Electric/Autonomous Vehicles
 Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Smart Control for Electric/Autonomous Vehicles 2 CONTENTS Introduction Benefits and market prospective How autonomous vehicles work Some research applications TEINVEIN 3 Introduction What is the global
Effects of traffic density on communication requirements for cooperative intersection collision avoidance systems (CICAS)
") Effects of traffic density on communication requirements for cooperative intersection collision avoidance systems (CICAS) ABSTRACT Steven E. Shladover University of California PATH Program, USA Cooperative
Effects of traffic density on communication requirements for cooperative intersection collision avoidance systems (CICAS) ABSTRACT Steven E. Shladover University of California PATH Program, USA Cooperative
Platooning Enabled by ETSI ITS-G5 Communications: Fuel Efficiency Analysis
 Platooning Enabled by ETSI ITS-G5 Communications: Fuel Efficiency Analysis Nikita Lyamin, Alexey Vinel {nikita.lyamin, alexey.vinel}@hh.se Halmstad University 1 / 30 We make an attempt to evaluate the
Platooning Enabled by ETSI ITS-G5 Communications: Fuel Efficiency Analysis Nikita Lyamin, Alexey Vinel {nikita.lyamin, alexey.vinel}@hh.se Halmstad University 1 / 30 We make an attempt to evaluate the
Automotive Electronics/Connectivity/IoT/Smart City Track
 Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS
 SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS www.ptvgroup.com Alastair Evanson, Solution Director PTV Vissim TOMORROW S CONNECTED & BUSINESS AUTONOMOUS MODEL: VEHICLES SIGNIFICANT SHIFT TO
SIMULATING AUTONOMOUS VEHICLES ON OUR TRANSPORT NETWORKS www.ptvgroup.com Alastair Evanson, Solution Director PTV Vissim TOMORROW S CONNECTED & BUSINESS AUTONOMOUS MODEL: VEHICLES SIGNIFICANT SHIFT TO
Intelligent Energy Management System Simulator for PHEVs at a Municipal Parking Deck in a Smart Grid Environment
 Intelligent Energy Management System Simulator for PHEVs at a Municipal Parking Deck in a Smart Grid Environment Preetika Kulshrestha, Student Member, IEEE, Lei Wang, Student Member, IEEE, Mo-Yuen Chow,
Intelligent Energy Management System Simulator for PHEVs at a Municipal Parking Deck in a Smart Grid Environment Preetika Kulshrestha, Student Member, IEEE, Lei Wang, Student Member, IEEE, Mo-Yuen Chow,
Transmitted by the expert from Germany
 Overview Transmitted by the expert from Germany Informal document No. GRRF-62-17 (62nd GRRF, 25-28 September 2007, agenda item 9(f)) TPMS Motivations Principles of tire pressure monitoring systems (TPMS)
Overview Transmitted by the expert from Germany Informal document No. GRRF-62-17 (62nd GRRF, 25-28 September 2007, agenda item 9(f)) TPMS Motivations Principles of tire pressure monitoring systems (TPMS)
Braking Performance Improvement Method for V2V Communication-Based Autonomous Emergency Braking at Intersections
 , pp.20-25 http://dx.doi.org/10.14257/astl.2015.86.05 Braking Performance Improvement Method for V2V Communication-Based Autonomous Emergency Braking at Intersections Sangduck Jeon 1, Gyoungeun Kim 1,
, pp.20-25 http://dx.doi.org/10.14257/astl.2015.86.05 Braking Performance Improvement Method for V2V Communication-Based Autonomous Emergency Braking at Intersections Sangduck Jeon 1, Gyoungeun Kim 1,
Vehicle Dynamics and Drive Control for Adaptive Cruise Vehicles
 Vehicle Dynamics and Drive Control for Adaptive Cruise Vehicles Dileep K 1, Sreepriya S 2, Sreedeep Krishnan 3 1,3 Assistant Professor, Dept. of AE&I, ASIET Kalady, Kerala, India 2Associate Professor,
Vehicle Dynamics and Drive Control for Adaptive Cruise Vehicles Dileep K 1, Sreepriya S 2, Sreedeep Krishnan 3 1,3 Assistant Professor, Dept. of AE&I, ASIET Kalady, Kerala, India 2Associate Professor,
RESEARCH. Incorporating Driver Behaviors into Connected and Automated Vehicle Simulation.
 RESEARCH Incorporating Driver Behaviors into Connected and Automated Vehicle Simulation www.atlas-center.org Incorporating Driver Behaviors into Connected and Automated Vehicle Simulation Report: ATLAS-2016-13
RESEARCH Incorporating Driver Behaviors into Connected and Automated Vehicle Simulation www.atlas-center.org Incorporating Driver Behaviors into Connected and Automated Vehicle Simulation Report: ATLAS-2016-13
Syllabus: Automated, Connected, and Intelligent Vehicles
 Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts
 Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar
Automated Commercial Motor Vehicles: Potential Driver and Vehicle Safety Impacts Office of Analysis, Research, and Technology Federal Motor Carrier Safety Administration Managing Fatigue Conference Mar