Chapter 12. Formula EV3: a racing robot
|
|
|
- Laureen Webb
- 6 years ago
- Views:
Transcription

1 Chapter 12. Formula EV3: a racing robot Now that you ve learned how to program the EV3 to control motors and sensors, you can begin making more sophisticated robots, such as autonomous vehicles, robotic animals, and complex machines. This chapter presents the Formula EV3 Race Car, shown in Figure Unlike the EXPLOR3R you built earlier, the race car uses three motors. Two Large Motors in the rear make the car drive, while the Medium Motor lets you steer the front wheels. Think of the rear motors as the car s engine and the motor in the front as the car s steering wheel. Figure The Formula EV3 Race Car Once you ve built the race car, you ll create several My Blocks to make it easy to program the car to drive and steer. Then you ll combine these blocks in one program that lets you control the car remotely and another program that makes the robot drive around autonomously and avoid obstacles. Finally, you ll be challenged to add more functionality to the design and to make it race faster using gears. building the Formula EV3 Race Car

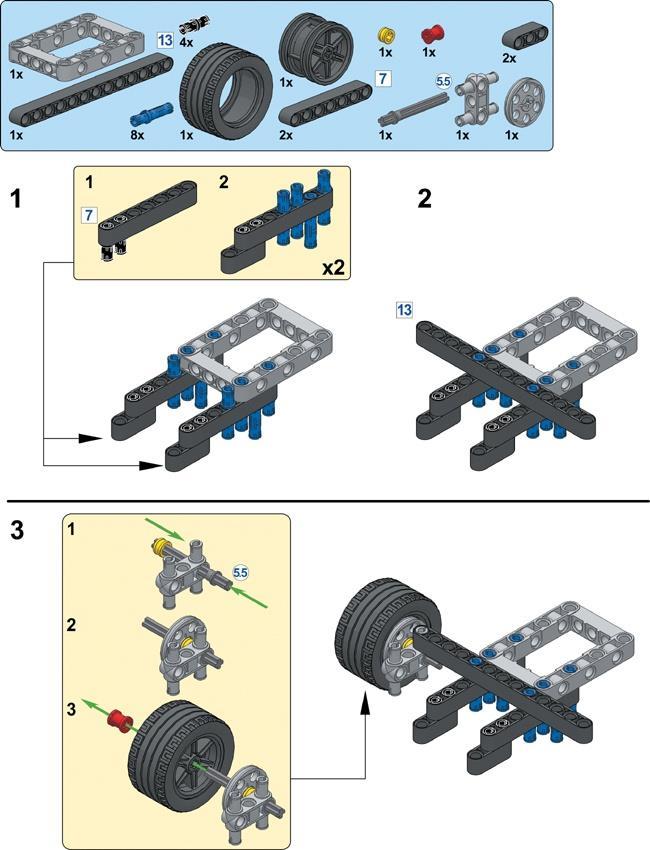
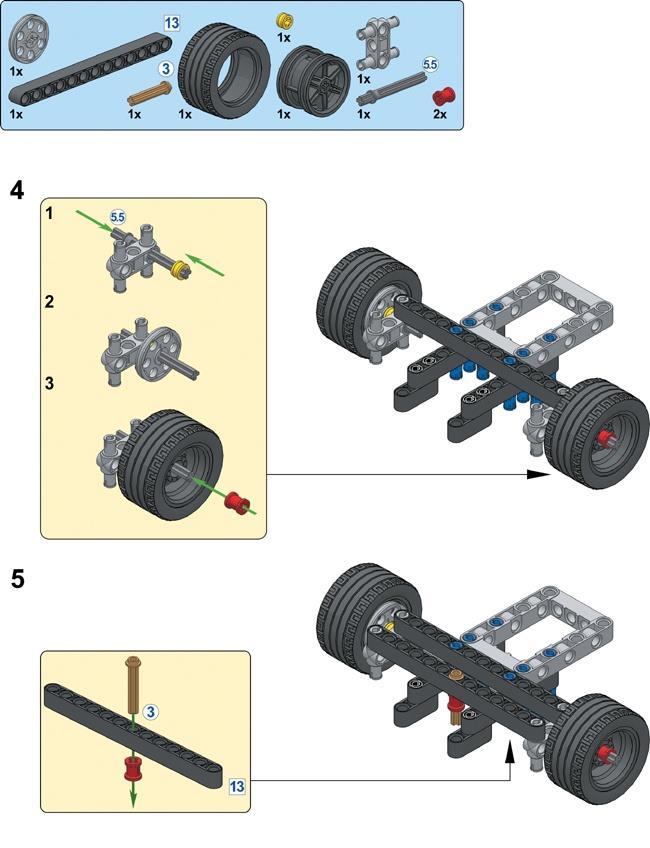
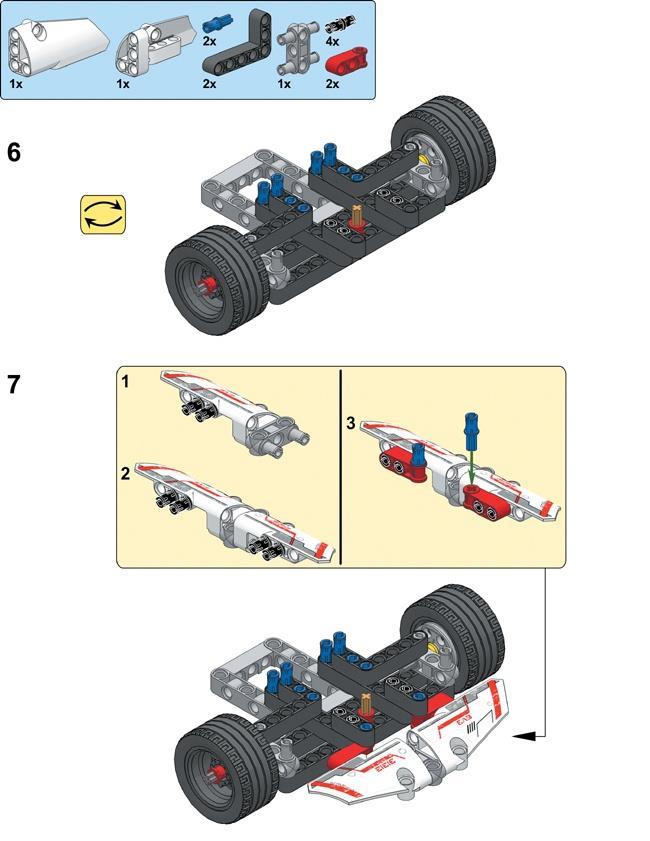
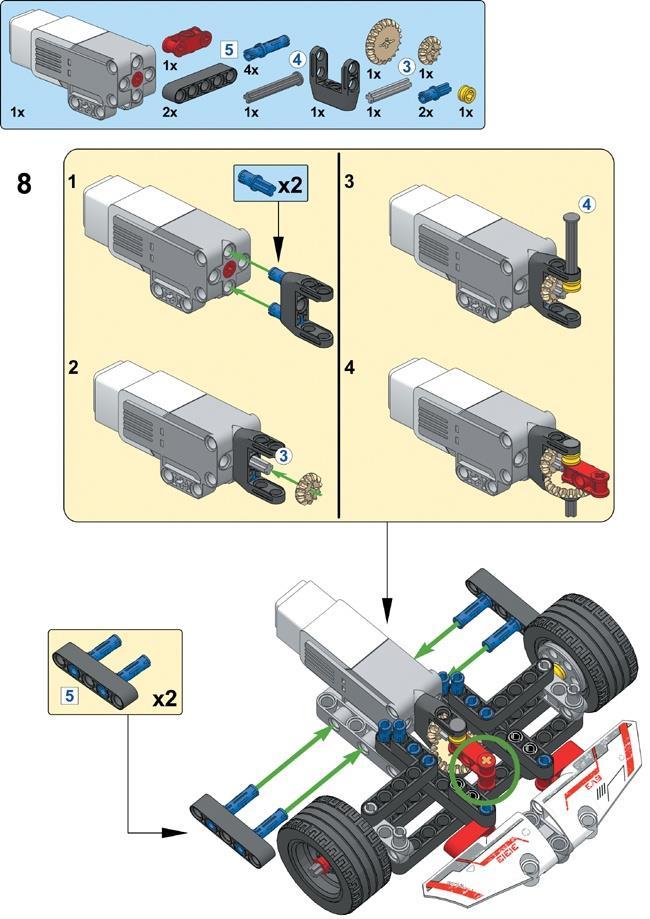
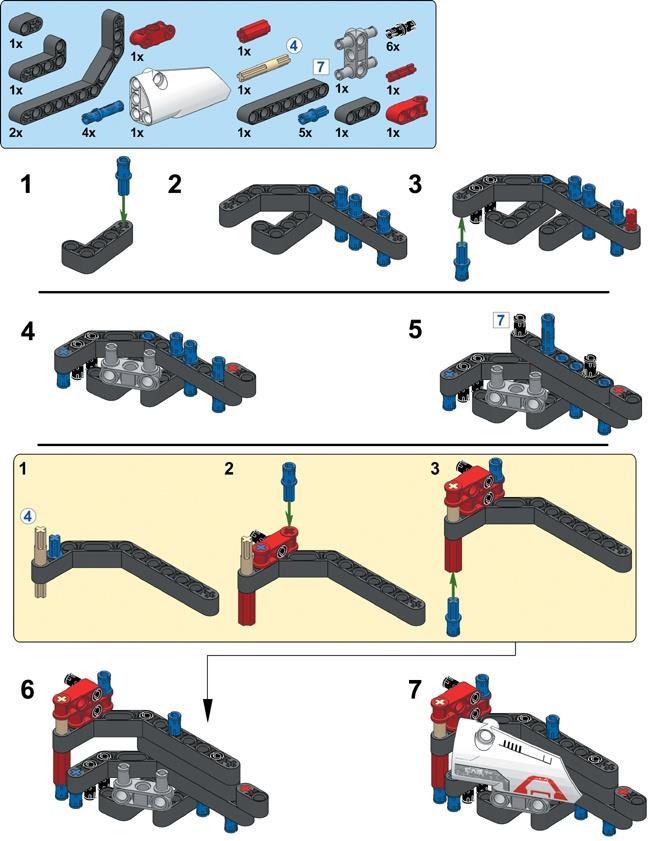
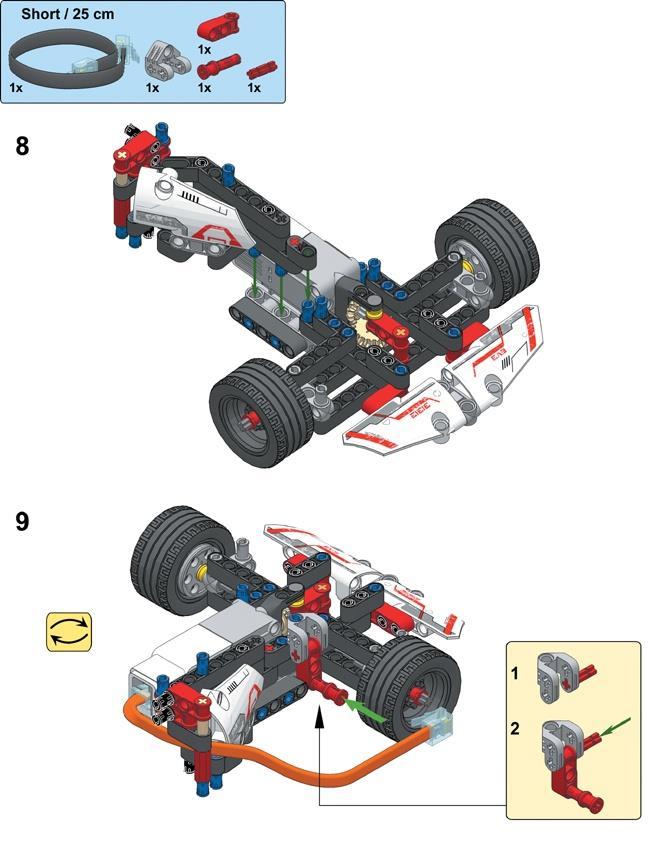
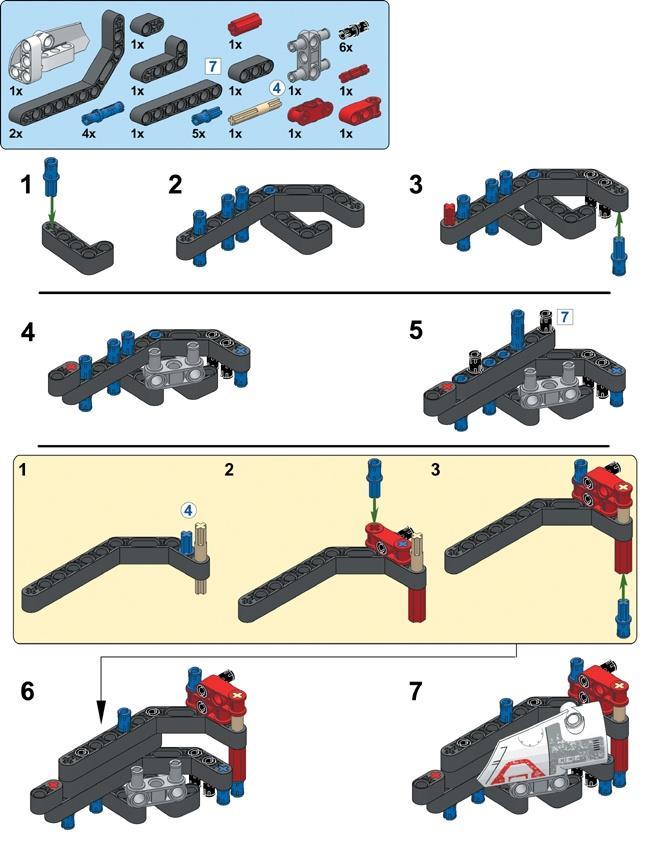
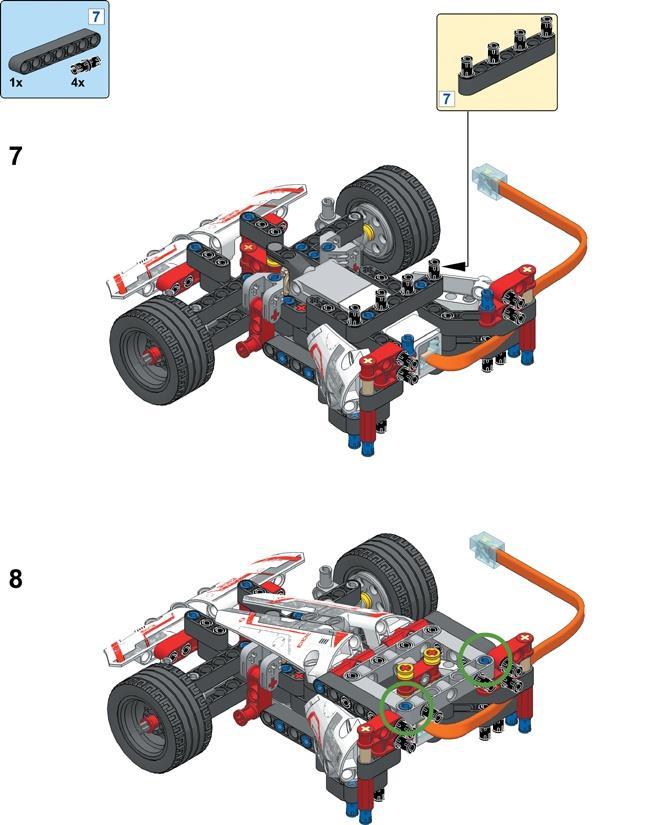
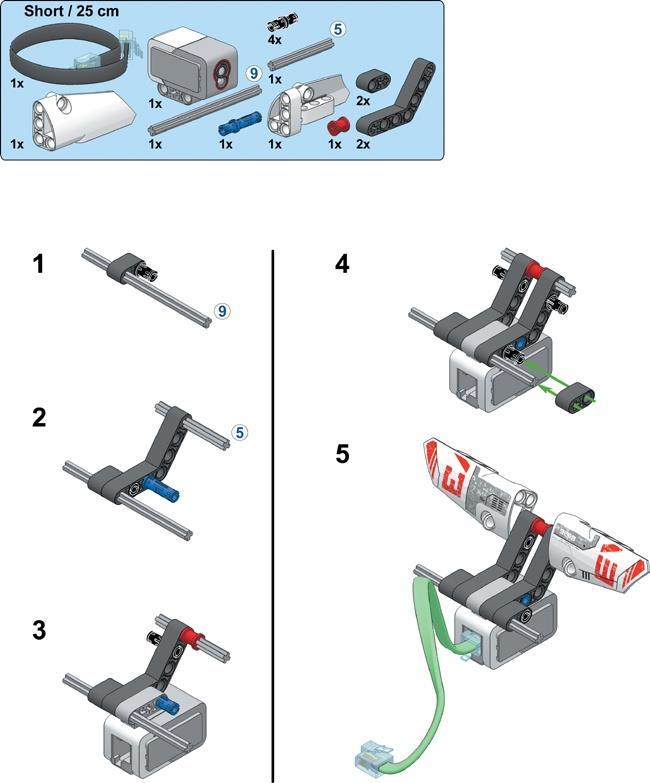
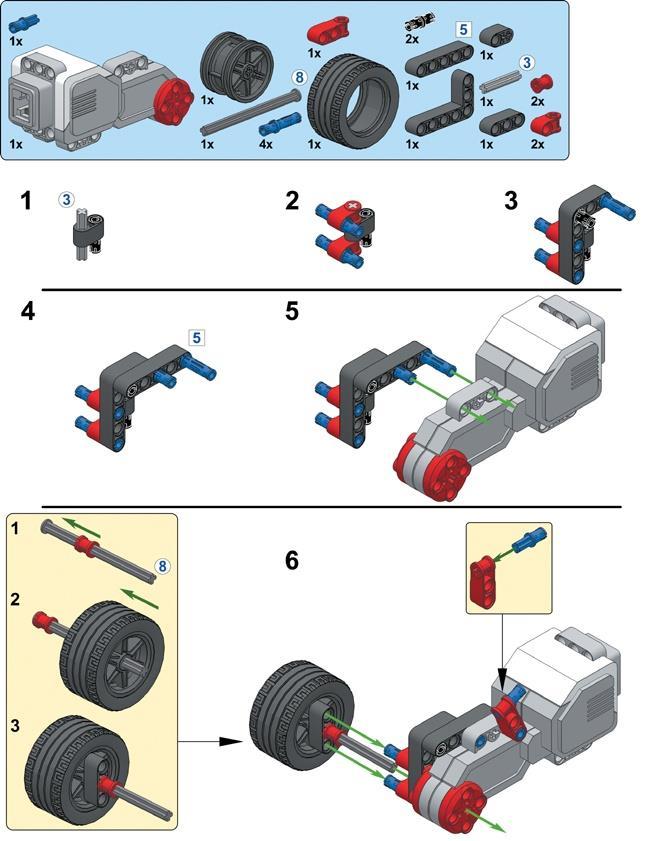
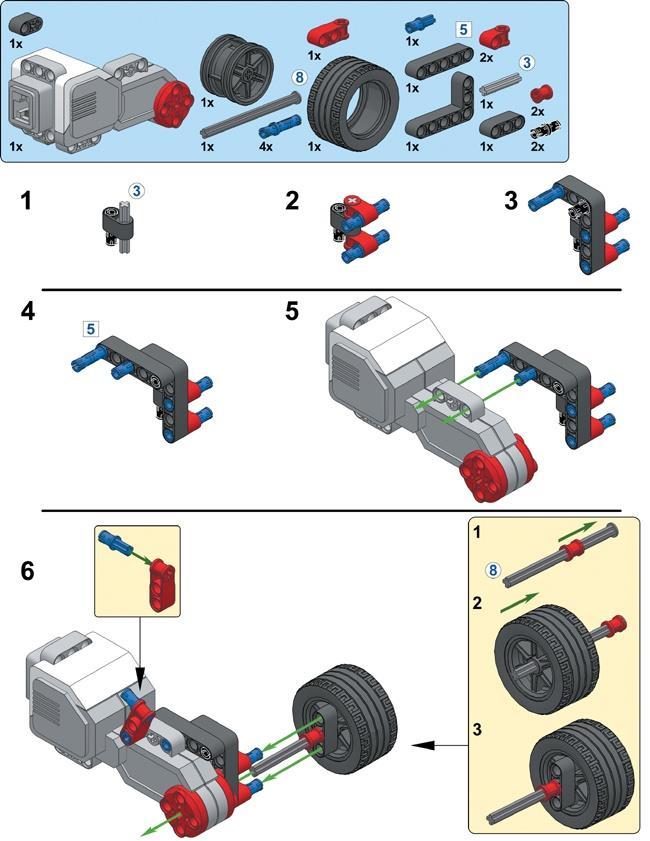
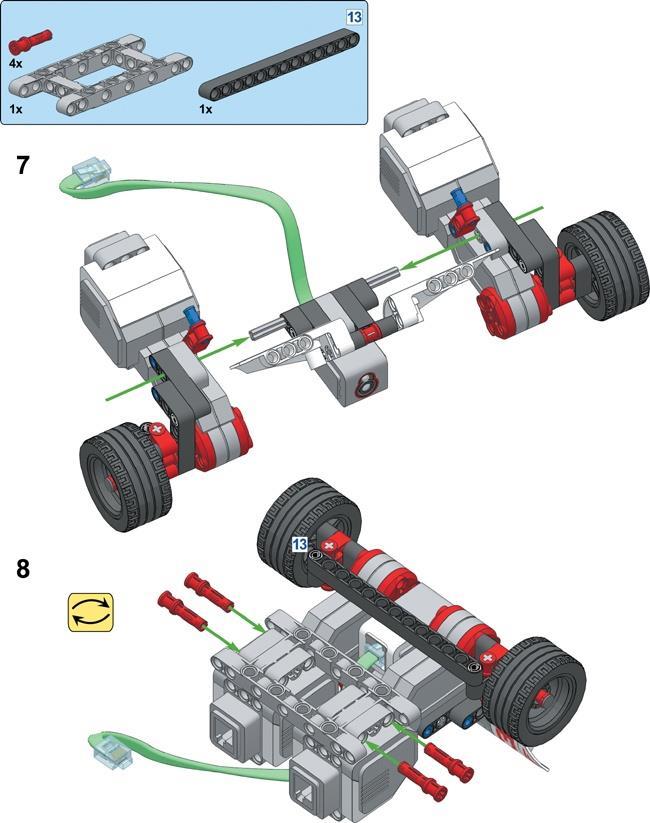
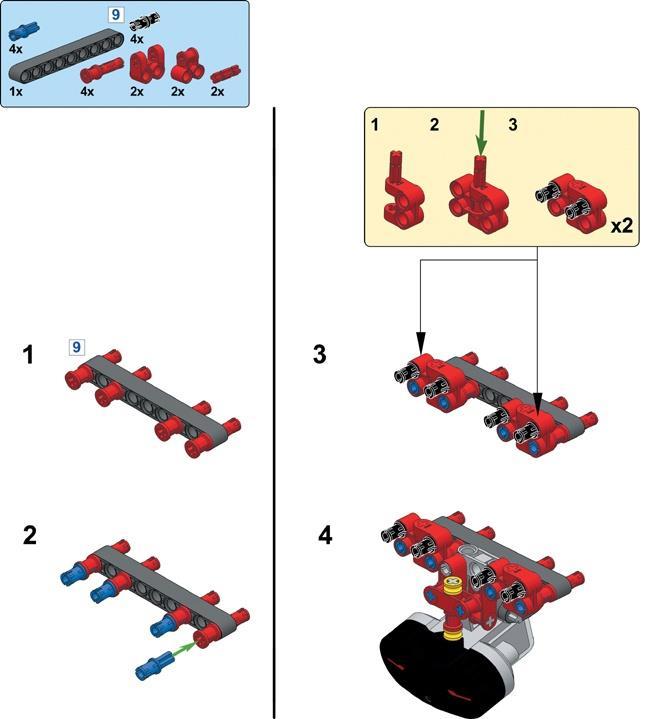
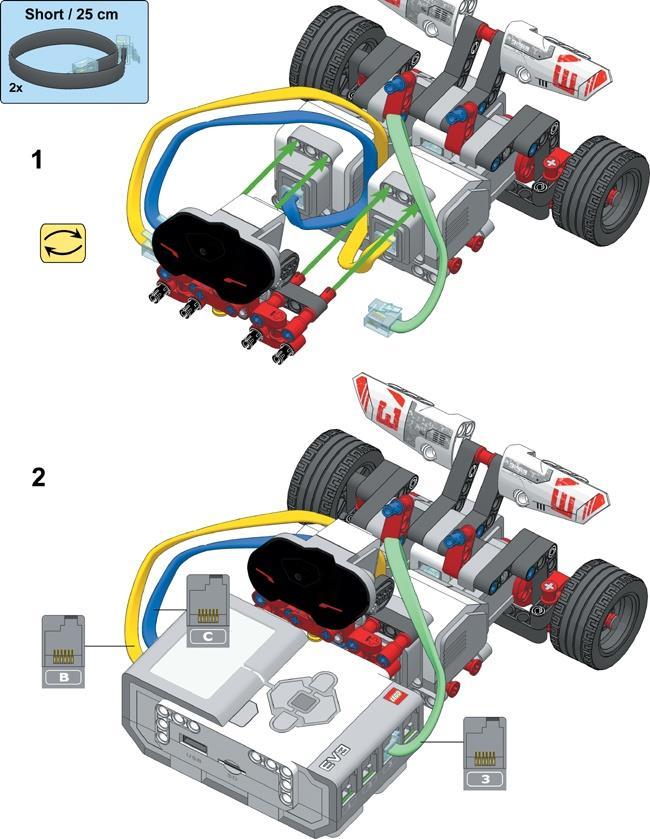
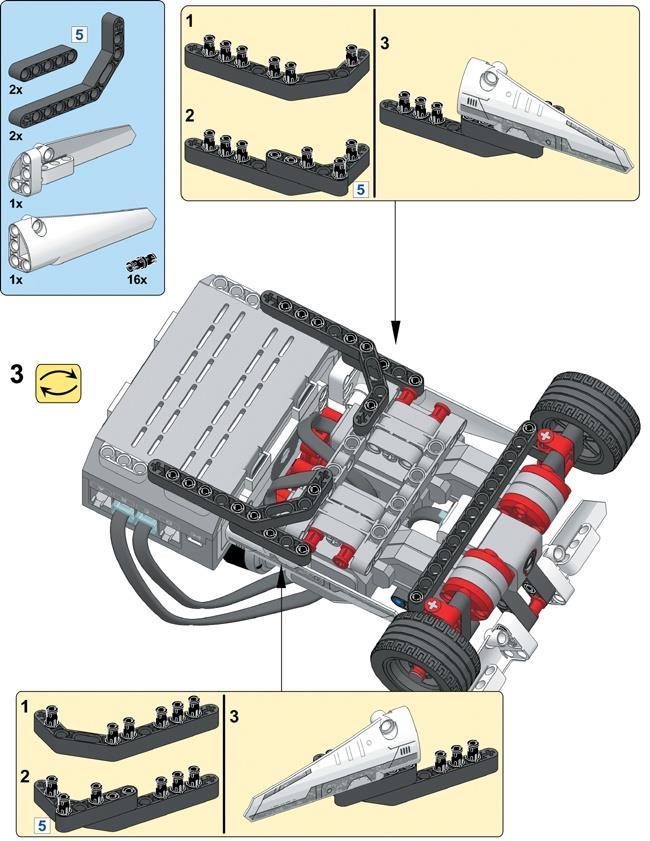
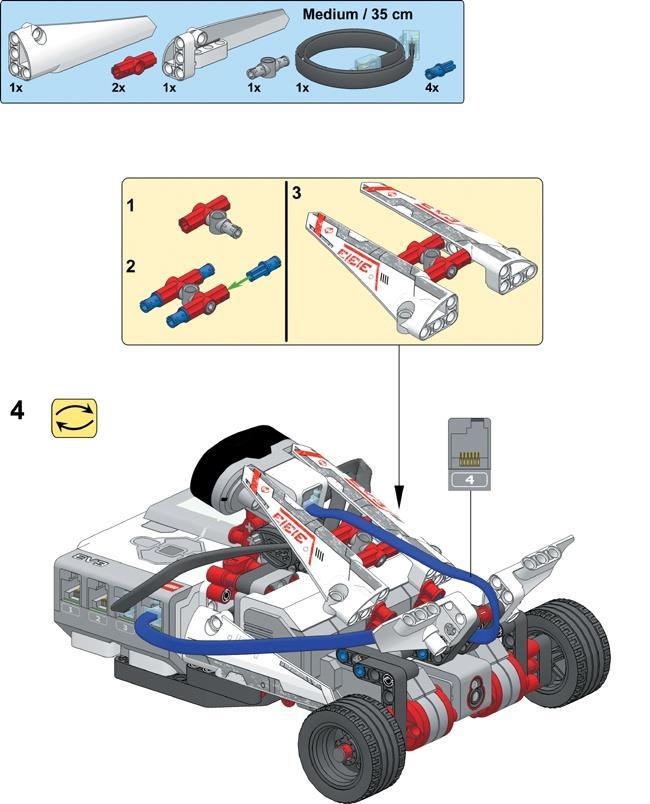
2 Build the race car by following the instructions on the subsequent pages. Before you start building, select the pieces you ll need to complete the robot, shown in Figure Figure The pieces needed to build the Formula EV3 Race Car
3
4
5
6
7
8
9

10

11
12
13
14
15
16

17
18
19
20
21

22 driving and steering The Formula EV3 Race Car uses two separate mechanisms to drive and steer. To drive the car, you switch on the Large Motors in the rear. You can steer the car by turning the front wheels to

23 the left or to the right with the Medium Motor in the front. When you combine driving and steering in one program, you can move the car in any direction. creating my blocks for steering In a moment, we ll create some custom My Blocks that will make it easy to program the Formula EV3 Race Car to steer in different directions. But first, let s have a look at how the steering mechanism works. Your program will use the Rotation Sensor inside the Medium Motor to accurately control the orientation of the front wheels, which determine the direction in which the robot will drive. To see how this works, use your hands to set the front wheels in the centered position, as shown in Figure Then, go to Port View on the EV3 brick, and observe the Rotation Sensor value (port A) as you manually steer the front wheels to the left and to the right. You ll find values around 60 degrees for the left, 0 degrees for the center, and 60 degrees for the right. Note that these angles indicate the position of the motor. The wheels turn left and right by a smaller amount because of the gears in the steering mechanism. Figure Rotation Sensor values for various positions of the front wheels. Make sure the wheels are in the center position before you start Port View in order to see these measurements. As shown in Figure 12-3, the Medium Motor should move toward the point where the sensor measures 60 degrees in order to make the robot steer left. To steer right, it should move toward the 60 degree measurement, and to drive straight ahead, it should move back to 0 degrees. You ll make three My Blocks, called Left, Right, and Center, to put the wheels in each of these positions. These blocks will work only if the sensor value is 0 degrees when the wheels are centered. Because you don t want to center the front wheels manually each time you run the program, you ll make another My Block, called Reset, to do this for you. This My Block centers the wheels and sets the Rotation Sensor value to 0. You ll place it at the start of each program for this robot. MY BLOCK #1: RESET

24 The front wheels can be in any position when the program starts, so you ll have to move them to a known orientation before you can center them. To accomplish this, you ll steer the wheels all the way to the left by having the Medium Motor rotate forward until it stalls. The stalled motor position should be 78 degrees past the center, which means you can move the wheels all the way to the left, then use a Medium Motor block to turn 78 degrees backward to reach the center position. Once the front wheels are aligned properly, you set the Rotation Sensor value to 0. From that point on, Rotation Sensor values near 0 indicate that the front wheels are aligned in the center. Begin by creating a new project called FormulaEV3 for all of the programs for your race car. Then create the Reset My Block, as shown in Figure Figure The Reset My Block moves the steering wheel to the center and resets the Rotation Sensor to 0. The completed My Block is shown on the right. MY BLOCK #2: LEFT The next My Block makes the front wheels steer to the left by turning the Medium Motor forward until the Rotation Sensor measures 60 degrees, but only if the wheels aren t steered left already. You ll use a Switch block to determine whether the wheels are already in the left orientation. If they are, the motor is turned off; if not, the motor turns forward until it reaches 60 degrees. This works regardless of whether the wheels are currently centered or steered right because the motor turns until it is in the correct position, rather than turning a fixed number of degrees. The Brake at End setting is set to True, locking the motor in this position until you have it make another movement. Place and configure the blocks shown in Figure 12-5, and turn them into a My Block called Left. NOTE The Switch and Wait blocks in the Left, Right, and Center My Blocks are all configured in Motor Rotation Compare Degrees mode. MY BLOCK #3: RIGHT

25 The Right My Block does just the opposite: First, it determines whether the wheels are already in the right orientation. If so, the motor is switched off; if not, the motor turns backward until it reaches the 60 degree position. To accomplish this, the Medium Motor is switched on at negative speed ( 30%), a Wait block pauses the program until the Rotation Sensor goes below 60 degrees, and then the motor is turned off. Create the Right My Block, as shown in Figure MY BLOCK #4: CENTER The front wheels are perfectly centered if the sensor value is exactly 0, but in this My Block, you ll consider any position between 5 and 5 degrees to be close enough to the center. (If you make this range any smaller, the motor tends to move past the center position each time it tries to reach it.) Figure The Left My Block makes the front wheels steer to the left. The completed My Block is shown on the right.

, they turn left until they reach the center (greater than 5 degrees).")
26 Figure The Right My Block makes the front wheels steer to the right. The completed My Block is shown on the right. If the motor is already in the center region when this My Block runs, the motor is switched off. If the wheels are to the left of the center (the sensor value is greater than 5 degrees), they turn right until they reach the center (less than 5 degrees). If the wheels are to the right (less than 5 degrees), they turn left until they reach the center (greater than 5 degrees). You use two Switch blocks to determine which of these positions the motor is in. Create the Center My Block using Figure 12-7.

27 Figure The Center My Block centers the front wheels regardless of the current position of the wheels. The completed My Block is shown on the right. Figure Use the SteerTest program to test your My Blocks. Run the program a few times, trying a different starting position for the front wheels each time. testing the my blocks Before you create a complete program, you should test the My Blocks to see whether they work as expected. Create the SteerTest program shown in Figure 12-8 and run it. The front wheels should automatically line up with the rear wheels when the Reset My Block runs. Next, they should turn to the left, to the right, and then back to the center. creating a remote control program Now that you ve created My Blocks for the steering mechanism, it s easy to create a remote control program using the techniques you learned in Chapter 8. Your next program makes the car drive in all directions as you press the buttons on the infrared remote, as shown in Figure For each of the button combinations, the robot runs one of the My Blocks to steer the front wheels and a Move Tank block to power the rear wheels. You use Move Tank blocks so you can choose the speed of both motors separately. If the robot goes straight forward or backward, both wheels turn at 75% speed. When turning, the outermost wheel should go slightly faster than the inner wheel, so you ll make the faster wheel drive at 80% speed and the slower wheel at 70%. A negative speed value, such as 75, makes the robot go forward due to the orientation of the motors in this robot. Positive values, such as 75, make the robot go backward. Now create the RemoteControl program using Figure NOTE If the robot does not drive in a straight line when driving forward, adjust the degrees value in the Medium Motor block in the Reset My Block shown in Figure Try a value slightly larger than 78 degrees if you see a deviation to the left; try a smaller value if the robot deviates to the right.
28

29 Figure The button combinations to make the Formula EV3 Race Car drive in any direction.
, the robot centers the front wheels and then switches off the rear wheels. racing autonomously Figure 12-11.")
30 Figure The RemoteControl program. Don t forget to add the Reset My Block at the start of the program. If none of the buttons on the remote is pressed (default case), the robot centers the front wheels and then switches off the rear wheels. racing autonomously Figure The AutonomousDrive program Now you ll create a program to make the race car drive around your room autonomously, avoiding obstacles with the Infrared Sensor. The robot begins by driving straight forward until the sensor detects a proximity value below 70%. Then, the robot reverses and steers left to move away from the obstacle. Finally, the robot centers its wheels so that it can drive straight forward in a new direction. Create the AutonomousDrive program, as shown in Figure further exploration In this chapter, you had a chance to build and program a robot from instructions. This is, of course, a lot of fun, but it s even more fun to create your own robot designs. For example, you could expand the design with gears or larger wheels to make the car faster, or you could turn the robot into a completely different vehicle, such as a passenger car or an off-road vehicle. Don t worry if you don t succeed on the first try; you ll gain more and more building experience as you continue to try new designs. Try out the Design Discoveries at the end of this chapter to get started, and be sure to use the techniques you learned in Chapter 10 and Chapter 11. DISCOVERY #65: OVERSHOOT EXPERIMENT! Difficulty: Time: In the Center My Block, you consider any position between 5 and 5 to be close enough to the center. To see why the robot should use such a large range of values, try changing the settings of the Wait and Switch blocks to reduce the center range boundaries to 1 and 1. What happens when you run the RemoteControl program? DISCOVERY #66: NIGHT RACING!
31 Difficulty: Time: So far you haven t used the Color Sensor that s built into the rear of the robot. Can you use this sensor to have the robot drive only when the lights in the room are off? Does the robot still detect obstacles when it s dark? HINT Begin by modifying the AutonomousDrive program to measure the ambient light intensity. You ll need a Switch block to determine whether the lights are on or off. What is the threshold value, and how do you place the other blocks in the switch? DISCOVERY #67: WIRED GAS PEDAL! Difficulty: Time: Can you create a program to control the race car s speed with the Touch Sensor and to control the steering with the remote? Create two parallel sequences in your program: One sequence should control the orientation of the front wheels using the remote control; the other sequence should control the speed of the rear wheels with the Touch Sensor. When you re ready, add engine sounds to your program using Sound blocks configured to play the Speeding, Speed idle, and Speed down sounds. HINT Connect the Touch Sensor to input port 1 on the EV3 brick using a long cable. Remember that the Touch Sensor can detect only whether the red button is pressed or not; it can t detect any intermediate position. DISCOVERY #68: BLINKING REAR LIGHT! Difficulty: Time: Formula 1 race cars have a bright red light in the rear that blinks in poor weather conditions to make them visible to other drivers. Can you make the light on the Color Sensor switch between blue and red every second to mimic the blinking pattern? There s no standard block that changes the light color, so you ll have to make one My Block to switch the light to blue and another to switch the light to red. HINT Use a Switch block to measure ambient light intensity, but don t place any blocks in the switch. The robot won t do anything with the measurement, but it will change the light to blue when doing an ambient light measurement. DISCOVERY #69: CRASH DETECTION!

32 Difficulty: Time: When you ran the AutonomousDrive program, you probably noticed that the Infrared Sensor is good at detecting the presence of walls and other large objects, but it doesn t always detect small objects, like a chair leg. Can you make the robot avoid obstacles in other ways? Use Unregulated Motor blocks to drive, and use the Rotation Sensors in the rear motors to detect a sudden drop in rotational speed. Make the robot reverse and drive away when it either sees an object with the Infrared Sensor or detects one by running into it. HINT Use the techniques you learned in Discovery #53 in Discovery #53: Low Speed Obstacle Detection!. DESIGN DISCOVERY #20: RACING FASTER! Building: Programming: Can you improve the Formula EV3 Race Car design to make the car go faster? Use 36T and 12T gears to speed up the rear wheels by a factor of 3, as shown in Figure You can also make the car go faster by using bigger wheels from other LEGO Technic sets, but you may need to adjust the front and rear wings to make space. FIGURE YOU CAN MAKE THE RACE CAR GO FASTER USING GEARS FOUND IN YOUR EV3 SET. (THE WHEEL AND THE REST OF THE VEHICLE ARE NOT SHOWN FOR BETTER VISIBILITY.)
33 DESIGN DISCOVERY #21: CAR UPGRADE! Building: Programming: Can you create your own vehicle based on the robot you built in this chapter? Take the Formula EV3 Race Car apart, except for the front-wheel steering mechanism (building the Formula EV3 Race Car). By choosing a new placement for the EV3 brick and the rear motors, you can create a completely different vehicle. To create a passenger car, for example, place the rear wheels closer to the front wheels and place the EV3 brick on top of the motors. You can also build an off-road vehicle by positioning the motors at an angle to create more ground clearance. Test your creation using the RemoteControl program you made in this chapter.
index Page numbers shown in italic indicate figures. Numbers & Symbols
 index Page numbers shown in italic indicate figures. Numbers & Symbols 12T gear, 265 24T gear, 265 36T gear, 265 / (division operator), 332 % (modulo operator), 332 * (multiplication operator), 332 A accelerating
index Page numbers shown in italic indicate figures. Numbers & Symbols 12T gear, 265 24T gear, 265 36T gear, 265 / (division operator), 332 % (modulo operator), 332 * (multiplication operator), 332 A accelerating
FLL Workshop 1 Beginning FLL Programming. Patrick R. Michaud University of Texas at Dallas September 8, 2016
 FLL Workshop 1 Beginning FLL Programming Patrick R. Michaud pmichaud@pobox.com University of Texas at Dallas September 8, 2016 Goals Learn basics of Mindstorms programming Be able to accomplish some missions
FLL Workshop 1 Beginning FLL Programming Patrick R. Michaud pmichaud@pobox.com University of Texas at Dallas September 8, 2016 Goals Learn basics of Mindstorms programming Be able to accomplish some missions
How to Build with the Mindstorm Kit
 How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
BEGINNER EV3 PROGRAMMING LESSON 1
 BEGINNER EV3 PROGRAMMING LESSON 1 Intro to Brick and Software, Moving Straight, Turning By: Droids Robotics www.ev3lessons.com SECTION 1: EV3 BASICS THE BRICK BUTTONS 1 = Back Undo Stop Program Shut Down
BEGINNER EV3 PROGRAMMING LESSON 1 Intro to Brick and Software, Moving Straight, Turning By: Droids Robotics www.ev3lessons.com SECTION 1: EV3 BASICS THE BRICK BUTTONS 1 = Back Undo Stop Program Shut Down
Deriving Consistency from LEGOs
 Deriving Consistency from LEGOs What we have learned in 6 years of FLL by Austin and Travis Schuh Objectives Basic Building Techniques How to Build Arms and Drive Trains Using Sensors How to Choose a Programming
Deriving Consistency from LEGOs What we have learned in 6 years of FLL by Austin and Travis Schuh Objectives Basic Building Techniques How to Build Arms and Drive Trains Using Sensors How to Choose a Programming
An Actual Driving Lesson. Learning to drive a manual car
 An Actual Driving Lesson Learning to drive a manual car Where are the controls that I might have to use in my driving: Knowing where the controls are, and being able to locate and use them without looking
An Actual Driving Lesson Learning to drive a manual car Where are the controls that I might have to use in my driving: Knowing where the controls are, and being able to locate and use them without looking
Unit 4: Breaking Away From the Curb MOVING THE CAR
 Unit 4: Breaking Away From the Curb MOVING THE CAR Objectives For Unit Four How Students do will I S.E.E. be able to list the steps necessary to turn the vehicle on and How do I move my off safely and
Unit 4: Breaking Away From the Curb MOVING THE CAR Objectives For Unit Four How Students do will I S.E.E. be able to list the steps necessary to turn the vehicle on and How do I move my off safely and
The Car Tutorial Part 2 Creating a Racing Game for Unity
 The Car Tutorial Part 2 Creating a Racing Game for Unity Part 2: Tweaking the Car 3 Center of Mass 3 Suspension 5 Suspension range 6 Suspension damper 6 Drag Multiplier 6 Speed, turning and gears 8 Exporting
The Car Tutorial Part 2 Creating a Racing Game for Unity Part 2: Tweaking the Car 3 Center of Mass 3 Suspension 5 Suspension range 6 Suspension damper 6 Drag Multiplier 6 Speed, turning and gears 8 Exporting
Chapter 5 Vehicle Operation Basics
 Chapter 5 Vehicle Operation Basics 5-1 STARTING THE ENGINE AND ENGAGING THE TRANSMISSION A. In the spaces provided, identify each of the following gears. AUTOMATIC TRANSMISSION B. Indicate the word or
Chapter 5 Vehicle Operation Basics 5-1 STARTING THE ENGINE AND ENGAGING THE TRANSMISSION A. In the spaces provided, identify each of the following gears. AUTOMATIC TRANSMISSION B. Indicate the word or
Basic Wheel Alignment Techniques
 Basic Wheel Alignment Techniques MASTERING THE BASICS: Modern steering and suspension systems are great examples of solid geometry at work. Wheel alignment integrates all the factors of steering and suspension
Basic Wheel Alignment Techniques MASTERING THE BASICS: Modern steering and suspension systems are great examples of solid geometry at work. Wheel alignment integrates all the factors of steering and suspension
Unit 2: Lesson 2. Balloon Racers. This lab is broken up into two parts, first let's begin with a single stage balloon rocket:
 Balloon Racers Introduction: We re going to experiment with Newton s Third law by blowing up balloons and letting them rocket, race, and zoom all over the place. When you first blow up a balloon, you re
Balloon Racers Introduction: We re going to experiment with Newton s Third law by blowing up balloons and letting them rocket, race, and zoom all over the place. When you first blow up a balloon, you re
Quick Guide. Unipro Laptimer Version Go faster faster. UNIPRO ApS
 Quick Guide Unipro Laptimer 5004 Version 1.32 Go faster faster UNIPRO ApS VIBORG HOVEDVEJ 24 DK-7100 VEJLE DENMARK Tel.: +45 75 85 11 82 Fax: +45 75 85 17 82 www.uniprolaptimer.com mail@uniprolaptimer.com
Quick Guide Unipro Laptimer 5004 Version 1.32 Go faster faster UNIPRO ApS VIBORG HOVEDVEJ 24 DK-7100 VEJLE DENMARK Tel.: +45 75 85 11 82 Fax: +45 75 85 17 82 www.uniprolaptimer.com mail@uniprolaptimer.com
APPENDIX A: Background Information to help you design your car:
 APPENDIX A: Background Information to help you design your car: Solar Cars: A solar car is an automobile that is powered by the sun. Recently, solar power has seen a large interest in the news as a way
APPENDIX A: Background Information to help you design your car: Solar Cars: A solar car is an automobile that is powered by the sun. Recently, solar power has seen a large interest in the news as a way
A discussion paper about why a cheap carbon battery is best to power your fuzz face pedal
 Effect pedals. Reinvented. A discussion paper about why a cheap carbon battery is best to power your fuzz face pedal Copyright 2012. All rights reserved. May be freely distributed provided that this copyright
Effect pedals. Reinvented. A discussion paper about why a cheap carbon battery is best to power your fuzz face pedal Copyright 2012. All rights reserved. May be freely distributed provided that this copyright
POWER and ELECTRIC CIRCUITS
 POWER and ELECTRIC CIRCUITS Name For many of us, our most familiar experience with the word POWER (units of measure: WATTS) is when we think about electricity. Most of us know that when we change a light
POWER and ELECTRIC CIRCUITS Name For many of us, our most familiar experience with the word POWER (units of measure: WATTS) is when we think about electricity. Most of us know that when we change a light
(Refer Slide Time: 00:01:10min)
") Introduction to Transportation Engineering Dr. Bhargab Maitra Department of Civil Engineering Indian Institute of Technology, Kharagpur Lecture - 11 Overtaking, Intermediate and Headlight Sight Distances
Introduction to Transportation Engineering Dr. Bhargab Maitra Department of Civil Engineering Indian Institute of Technology, Kharagpur Lecture - 11 Overtaking, Intermediate and Headlight Sight Distances
Compound Gears Laboratory - Part 2
 Compound Gears Laboratory - Part 2 Names: Date: About this Laboratory In this laboratory, you will explore compound gear trains, gear ratios, and how the number of teeth on a drive and driven gear affect
Compound Gears Laboratory - Part 2 Names: Date: About this Laboratory In this laboratory, you will explore compound gear trains, gear ratios, and how the number of teeth on a drive and driven gear affect
Chapter 1. Stair-Climber. Doug Carlson
 Chapter 1 Stair-Climber Doug Carlson 1 2 Chapter # Chapter Title Bill of Materials These are the parts you will need to build the Stair-Climber as shown. Introduction Stair-Climber is the latest in a series
Chapter 1 Stair-Climber Doug Carlson 1 2 Chapter # Chapter Title Bill of Materials These are the parts you will need to build the Stair-Climber as shown. Introduction Stair-Climber is the latest in a series
Cabrillo College Physics 10L. LAB 7 Circuits. Read Hewitt Chapter 23
 Cabrillo College Physics 10L Name LAB 7 Circuits Read Hewitt Chapter 23 What to learn and explore Every electrical circuit must have at least one source (which supplies electrical energy to the circuit)
Cabrillo College Physics 10L Name LAB 7 Circuits Read Hewitt Chapter 23 What to learn and explore Every electrical circuit must have at least one source (which supplies electrical energy to the circuit)
Throttle Setup by Jason Priddle
 Throttle Setup by Jason Priddle This article is written around JR Radio convention. The numbers noted are for illustrative purposes, and the same principles apply to all radios Ever feel like all your
Throttle Setup by Jason Priddle This article is written around JR Radio convention. The numbers noted are for illustrative purposes, and the same principles apply to all radios Ever feel like all your
Laser Tag Droid. Jake Hamill, Martin Litwiller, Christian Topete ECE 445 Project Proposal
 Laser Tag Droid Jake Hamill, Martin Litwiller, Christian Topete ECE 445 Project Proposal 1. Introduction 1.1 Objective Our proposed project is to design, build, and test a remote control laser tag droid
Laser Tag Droid Jake Hamill, Martin Litwiller, Christian Topete ECE 445 Project Proposal 1. Introduction 1.1 Objective Our proposed project is to design, build, and test a remote control laser tag droid
RR Concepts. The StationMaster can control DC trains or DCC equipped trains set to linear mode.
 Jan, 0 S RR Concepts M tation aster - 5 Train Controller - V software This manual contains detailed hookup and programming instructions for the StationMaster train controller available in a AMP or 0AMP
Jan, 0 S RR Concepts M tation aster - 5 Train Controller - V software This manual contains detailed hookup and programming instructions for the StationMaster train controller available in a AMP or 0AMP
INTERMEDIATE PROGRAMMING LESSON
 INTERMEDIATE PROGRAMMING LESSON DIFFERENT WAYS OF MOVING: SYNCHRONIZATION, REGULATED POWER, RAMP UP & DOWN By Sanjay and Arvind Seshan Objectives 1) Learn about different blocks for moving the robot and
INTERMEDIATE PROGRAMMING LESSON DIFFERENT WAYS OF MOVING: SYNCHRONIZATION, REGULATED POWER, RAMP UP & DOWN By Sanjay and Arvind Seshan Objectives 1) Learn about different blocks for moving the robot and
Selected excerpts from the book: Lab Scopes: Introductory & Advanced. Steven McAfee
 Selected excerpts from the book: Lab Scopes: Introductory & Advanced Steven McAfee 1. 2. 3. 4. 5. 6. Excerpt from Chapter 1 Lab Scopes How do they work? (page 6) Excerpt from Chapter 3 Pattern Recognition
Selected excerpts from the book: Lab Scopes: Introductory & Advanced Steven McAfee 1. 2. 3. 4. 5. 6. Excerpt from Chapter 1 Lab Scopes How do they work? (page 6) Excerpt from Chapter 3 Pattern Recognition
EGT Plus Instructions
 Computech Systems, Inc. 29962 Killpeck Creek Ct. Charlotte Hall, MD 20622 301-884-5712 EGT Plus Instructions The Computech Systems EGT Plus is designed to monitor not only exhaust gas, liquid, tire and
Computech Systems, Inc. 29962 Killpeck Creek Ct. Charlotte Hall, MD 20622 301-884-5712 EGT Plus Instructions The Computech Systems EGT Plus is designed to monitor not only exhaust gas, liquid, tire and
Video Communications Presents. Reference Guide and Test Questions. Tail Swing Safety for School Bus Drivers
 Video Communications Presents Reference Guide and Test Questions Tail Swing Safety for School Bus Drivers Introduction Tail swing occurs whenever a bus makes a turn. The school bus driver must be aware
Video Communications Presents Reference Guide and Test Questions Tail Swing Safety for School Bus Drivers Introduction Tail swing occurs whenever a bus makes a turn. The school bus driver must be aware
New Perspectives on Intelligence
 New Perspectives on Intelligence Intelligence: The Chinese Room and Turing Another Perspective on Intelligence Braitenberg's book, Vehicles: Experiments in Synthetic Psychology discusses ideas about the
New Perspectives on Intelligence Intelligence: The Chinese Room and Turing Another Perspective on Intelligence Braitenberg's book, Vehicles: Experiments in Synthetic Psychology discusses ideas about the
HOW TO MAKE YOUR OWN BATTERIES
 HOW TO MAKE YOUR OWN BATTERIES 1 Page TABLE OF CONTENTS Introduction....3 Usage....4 Aluminum Can Batteries/Cells....8 A Long Lasting, Yet Powerful Battery....10 PVC Pipe Batteries...13 Lab Notes....17
HOW TO MAKE YOUR OWN BATTERIES 1 Page TABLE OF CONTENTS Introduction....3 Usage....4 Aluminum Can Batteries/Cells....8 A Long Lasting, Yet Powerful Battery....10 PVC Pipe Batteries...13 Lab Notes....17
Lockpicking Tools: User Guide
 Lockpicking Tools: User Guide Tips & Tricks for using Lockpicking Tools Contents Introduction..3 Padlock Shims..5 Comb Picks....7 Jiggler Keys...9 The Lock Gun..11 Bypass Sheets....13 Bump Keys...14 Other
Lockpicking Tools: User Guide Tips & Tricks for using Lockpicking Tools Contents Introduction..3 Padlock Shims..5 Comb Picks....7 Jiggler Keys...9 The Lock Gun..11 Bypass Sheets....13 Bump Keys...14 Other
What is it that makes that. LET S PLAY BALL Time to Shift Gears. by Lance Wiggins. Typical 4 Speed Mitsubishi
 LET S PLAY BALL Time to Shift Gears Typical 4 Speed Mitsubishi by Lance Wiggins What is it that makes that grinding noise in my transmission? I just had it serviced and that noise started shortly after
LET S PLAY BALL Time to Shift Gears Typical 4 Speed Mitsubishi by Lance Wiggins What is it that makes that grinding noise in my transmission? I just had it serviced and that noise started shortly after
What Is an Electric Motor? How Does a Rotation Sensor Work?
 What Is an Electric Motor? How Does a Rotation Sensor Work? Electric Motors Pre-Quiz 1. What is an electric motor? 2. Name two applications (things) you use every day that use electric motors. 3. How does
What Is an Electric Motor? How Does a Rotation Sensor Work? Electric Motors Pre-Quiz 1. What is an electric motor? 2. Name two applications (things) you use every day that use electric motors. 3. How does
Trading the Line. How to Use Trendlines to Spot Reversals and Ride Trends. ebook
 Trading the Line How to Use Trendlines to Spot Reversals and Ride Trends ebook EWI ebook Trading the Line How to Use Trendlines to Spot Reversals and Ride Trends By Jeffrey Kennedy, Elliott Wave International
Trading the Line How to Use Trendlines to Spot Reversals and Ride Trends ebook EWI ebook Trading the Line How to Use Trendlines to Spot Reversals and Ride Trends By Jeffrey Kennedy, Elliott Wave International
Cross Hare Installation Guide
 Cross Hare Installation Guide Introduction: The Cross Hare is designed to provide all of the functions you need to control a one or two track grade crossing in a prototypical manner. The Cross Hare uses
Cross Hare Installation Guide Introduction: The Cross Hare is designed to provide all of the functions you need to control a one or two track grade crossing in a prototypical manner. The Cross Hare uses
Chapter 7: DC Motors and Transmissions. 7.1: Basic Definitions and Concepts
 Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
Escaping the Kill Zone (Ramming)
") Page 1 of 5 Escaping the Kill Zone (Ramming) Imagine your protection detail traveling en route when around that blind turn, the one that you advanced so well but could not avoid, several cars suddenly
Page 1 of 5 Escaping the Kill Zone (Ramming) Imagine your protection detail traveling en route when around that blind turn, the one that you advanced so well but could not avoid, several cars suddenly
The Panic Slip. Let the Racing Begin!!! Results for our events are available on our web site at
 SCCA, Region 105 _ June, 2013 The Panic Slip Let the Racing Begin!!! For those that haven t yet made it out, we ve started our racing season with two two-race weekends since last Panic Slip Montana Challenge
SCCA, Region 105 _ June, 2013 The Panic Slip Let the Racing Begin!!! For those that haven t yet made it out, we ve started our racing season with two two-race weekends since last Panic Slip Montana Challenge
Rotary Diecutting Accuracy Is it the Die or the Diecutter? Clint Medlock, Stafford Cutting Dies, Inc., Indian Trail, NC, USA
 Rotary Diecutting Accuracy Is it the Die or the Diecutter? Clint Medlock, Stafford Cutting Dies, Inc., Indian Trail, NC, USA With my 35 years of rotary corrugated diemaking experience, you would think
Rotary Diecutting Accuracy Is it the Die or the Diecutter? Clint Medlock, Stafford Cutting Dies, Inc., Indian Trail, NC, USA With my 35 years of rotary corrugated diemaking experience, you would think
SHAFT ALIGNMENT FORWARD
 Service Application Manual SAM Chapter 630-76 Section 24 SHAFT ALIGNMENT FORWARD One of the basic problems of any installation is aligning couplings or shafts. Therefore, this section will endeavor to
Service Application Manual SAM Chapter 630-76 Section 24 SHAFT ALIGNMENT FORWARD One of the basic problems of any installation is aligning couplings or shafts. Therefore, this section will endeavor to
It has taken a while to get
 HOVERING15 99 15 BASICS HOVERING Hovering It has taken a while to get here, but this is what all the building and planning were for to see light under those skids. But this is also the time when you have
HOVERING15 99 15 BASICS HOVERING Hovering It has taken a while to get here, but this is what all the building and planning were for to see light under those skids. But this is also the time when you have
Parking and Reversing Safely
 GE Capital Safe Driving Parking and Reversing Safely Driver guide Information Factsheet Safe Driving Parking in Car Parks Avoiding costly damage Many of us struggle with parking in car parks long after
GE Capital Safe Driving Parking and Reversing Safely Driver guide Information Factsheet Safe Driving Parking in Car Parks Avoiding costly damage Many of us struggle with parking in car parks long after
2001 V70 T5 ETM Removal and Cleaning Directions
 2001 V70 T5 ETM Removal and Cleaning Directions Howard Cheng howardc64@gmail.com 10/24/05 Version 1.4 Read this before you start I performed this ETM cleaning because I had gotten 2 reduced performance
2001 V70 T5 ETM Removal and Cleaning Directions Howard Cheng howardc64@gmail.com 10/24/05 Version 1.4 Read this before you start I performed this ETM cleaning because I had gotten 2 reduced performance
CONTENTS PROJECT IDEAS 4 ROBO 1 6 ROBO 2 9 PATHFINDER 1 13 PATHFINDER 2 15 ACROBOT 1 17 ACROBOT 2 20 SPECIAL FEATURES. Movement 26.
 The Constructopedia is a building guide for the Robotics Invention System that offers suggestions, hints, and tips to get you started on the CD-ROM Challenges and robotic inventions of your own design.
The Constructopedia is a building guide for the Robotics Invention System that offers suggestions, hints, and tips to get you started on the CD-ROM Challenges and robotic inventions of your own design.
Door panel removal F07 5 GT
 Things needed Decent plastic trim removal tools Torx 30 Spare door clips 07147145753 I got away with a set of 5 but if I did it again I d be cautious and get 10. From prior experience if they are damaged
Things needed Decent plastic trim removal tools Torx 30 Spare door clips 07147145753 I got away with a set of 5 but if I did it again I d be cautious and get 10. From prior experience if they are damaged
The purpose of this lab is to explore the timing and termination of a phase for the cross street approach of an isolated intersection.
 1 The purpose of this lab is to explore the timing and termination of a phase for the cross street approach of an isolated intersection. Two learning objectives for this lab. We will proceed over the remainder
1 The purpose of this lab is to explore the timing and termination of a phase for the cross street approach of an isolated intersection. Two learning objectives for this lab. We will proceed over the remainder
10 questions and answers about electric cars
 This site uses cookies from Google to deliver its services, to personalize ads and to analyze traffic. Information about your use of this site is shared with Google. By using this site, you agree to its
This site uses cookies from Google to deliver its services, to personalize ads and to analyze traffic. Information about your use of this site is shared with Google. By using this site, you agree to its
An Actual Driving Lesson Learning to drive an automatic car
 An Actual Driving Lesson Learning to drive an automatic car Where are the controls that I might have to use in my driving: Knowing where the controls are, and being able to locate and use them without
An Actual Driving Lesson Learning to drive an automatic car Where are the controls that I might have to use in my driving: Knowing where the controls are, and being able to locate and use them without
Batteries n Bulbs: Voltage, Current and Resistance (8/6/15) (approx. 2h)
 (approx. 2h)") Batteries n Bulbs: Voltage, Current and Resistance (8/6/15) (approx. 2h) Introduction A simple electric circuit can be made from a voltage source (batteries), wires through which current flows and a resistance,
Batteries n Bulbs: Voltage, Current and Resistance (8/6/15) (approx. 2h) Introduction A simple electric circuit can be made from a voltage source (batteries), wires through which current flows and a resistance,
TAYO EPISODE #22. SPEEDING IS DANGEROUS. TAYO (VO) Speeding is Dangerous! Hm-hm-hm hm-hm-hm... NA Tayo is driving along the river on his day off.
 Speeding is Dangerous! Hm-hm-hm hm-hm-hm... NA Tayo is driving along the river on his day off.") EPISODE #22. SPEEDING IS DANGEROUS [01;12;00;00)] #1. EXT. RIVERSIDE ROAD DAY (VO) Speeding is Dangerous! Hm-hm-hm hm-hm-hm... NA Tayo is driving along the river on his day off. Hi, Tayo. Huh? Hey, Shine.
EPISODE #22. SPEEDING IS DANGEROUS [01;12;00;00)] #1. EXT. RIVERSIDE ROAD DAY (VO) Speeding is Dangerous! Hm-hm-hm hm-hm-hm... NA Tayo is driving along the river on his day off. Hi, Tayo. Huh? Hey, Shine.
MANUAL SHIFT AND AUTOMATIC TRANSMISSIONS
 CHAPTER 17 MANUAL SHIFT AND AUTOMATIC TRANSMISSIONS The vehicle driver must be prepared to drive vehicles with either manual or automatic transmission. Each transmission type requires specific methods
CHAPTER 17 MANUAL SHIFT AND AUTOMATIC TRANSMISSIONS The vehicle driver must be prepared to drive vehicles with either manual or automatic transmission. Each transmission type requires specific methods
8051 MICRO-CONTROLLER BASED ROBOTIC CAR
 8051 MICRO-CONTROLLER BASED ROBOTIC CAR Robotic Car is a miniature prototype car powered by batteries whose various movements can be control either manually or automatically, or the combination of both.
8051 MICRO-CONTROLLER BASED ROBOTIC CAR Robotic Car is a miniature prototype car powered by batteries whose various movements can be control either manually or automatically, or the combination of both.
Steeda Sport Mustang Lowering Springs (2005+) - Installation Instructions
 - Installation Instructions") Steeda Sport Mustang Lowering Springs (2005+) - Installation Instructions The below installation instructions work for the following products: Steeda Sport Mustang Lowering Springs (2005+) Please read
Steeda Sport Mustang Lowering Springs (2005+) - Installation Instructions The below installation instructions work for the following products: Steeda Sport Mustang Lowering Springs (2005+) Please read
Roehrig Engineering, Inc.
 Roehrig Engineering, Inc. Home Contact Us Roehrig News New Products Products Software Downloads Technical Info Forums What Is a Shock Dynamometer? by Paul Haney, Sept. 9, 2004 Racers are beginning to realize
Roehrig Engineering, Inc. Home Contact Us Roehrig News New Products Products Software Downloads Technical Info Forums What Is a Shock Dynamometer? by Paul Haney, Sept. 9, 2004 Racers are beginning to realize
Introducing. chip and PIN
 Introducing chip and PIN PIN not pen The way that we pay for things with credit and debit cards is changing. By 2005, most of us will be using a smart, new system in the UK called chip and PIN which will
Introducing chip and PIN PIN not pen The way that we pay for things with credit and debit cards is changing. By 2005, most of us will be using a smart, new system in the UK called chip and PIN which will
Content Page passtptest.com
 All rights reserved. No part of this book shall be reproduced, stored in a retrieval system, or transmitted by any means, electronic, mechanical, photocopying, recording, or otherwise, without written
All rights reserved. No part of this book shall be reproduced, stored in a retrieval system, or transmitted by any means, electronic, mechanical, photocopying, recording, or otherwise, without written
Biasing the Vintage Series (Nomad, BelAir, VT50, Vintage 33)
") Biasing the Vintage Series (Nomad, BelAir, VT50, Vintage 33) This chapter will outline and guide you through the procedures of biasing the Vintage series amplifier. The procedures are broken down in a
Biasing the Vintage Series (Nomad, BelAir, VT50, Vintage 33) This chapter will outline and guide you through the procedures of biasing the Vintage series amplifier. The procedures are broken down in a
4.2 Friction. Some causes of friction
 4.2 Friction Friction is a force that resists motion. Friction is found everywhere in our world. You feel the effects of when you swim, ride in a car, walk, and even when you sit in a chair. Friction can
4.2 Friction Friction is a force that resists motion. Friction is found everywhere in our world. You feel the effects of when you swim, ride in a car, walk, and even when you sit in a chair. Friction can
INDIAN INSTITUTE OF TECHNOLOGY KHARAGPUR NPTEL ONLINE CERTIFICATION COURSE. On Industrial Automation and Control
 INDIAN INSTITUTE OF TECHNOLOGY KHARAGPUR NPTEL ONLINE CERTIFICATION COURSE On Industrial Automation and Control By Prof. S. Mukhopadhyay Department of Electrical Engineering IIT Kharagpur Topic Lecture
INDIAN INSTITUTE OF TECHNOLOGY KHARAGPUR NPTEL ONLINE CERTIFICATION COURSE On Industrial Automation and Control By Prof. S. Mukhopadhyay Department of Electrical Engineering IIT Kharagpur Topic Lecture
SCI ON TRAC ENCEK WITH
 WITH TRACK ON SCIENCE PART 1: GET GOING! What s It About? The Scout Association has partnered with HOT WHEELS, the COOLEST and most iconic diecast car brand to help Beavers and Cubs explore FUN scientific
WITH TRACK ON SCIENCE PART 1: GET GOING! What s It About? The Scout Association has partnered with HOT WHEELS, the COOLEST and most iconic diecast car brand to help Beavers and Cubs explore FUN scientific
The man with the toughest job in F1
 The man with the toughest job in F1 Tyres are the key to performance in Formula 1, and as Caterham s Head of Tyres, Peter Hewson s job is to know as much about them as possible. There s only one problem:
The man with the toughest job in F1 Tyres are the key to performance in Formula 1, and as Caterham s Head of Tyres, Peter Hewson s job is to know as much about them as possible. There s only one problem:
10 questions and answers about electric cars
 10 questions and answers about electric cars https://www./en/innovation/10-questions-answers-electric-cars/ The future of cars will be electric. But what does this mean in practice? How far will the cars
10 questions and answers about electric cars https://www./en/innovation/10-questions-answers-electric-cars/ The future of cars will be electric. But what does this mean in practice? How far will the cars
ALIGNING A 2007 CADILLAC CTS-V
 ALIGNING A 2007 CADILLAC CTS-V I ll describe a four-wheel alignment of a 2007 Cadillac CTS-V in this document using homemade alignment tools. I described the tools in a previous document. The alignment
ALIGNING A 2007 CADILLAC CTS-V I ll describe a four-wheel alignment of a 2007 Cadillac CTS-V in this document using homemade alignment tools. I described the tools in a previous document. The alignment
ALTERNATING CURRENT - PART 1
 Reading 9 Ron Bertrand VK2DQ http://www.radioelectronicschool.com ALTERNATING CURRENT - PART 1 This is a very important topic. You may be thinking that when I speak of alternating current (AC), I am talking
Reading 9 Ron Bertrand VK2DQ http://www.radioelectronicschool.com ALTERNATING CURRENT - PART 1 This is a very important topic. You may be thinking that when I speak of alternating current (AC), I am talking
Interchanges are a fact of life for. Interchanges for the E4OD and 4R100 STREET SMART. by Mike Brown
 STREET SMART by Mike Brown Interchanges for the E4OD and 4R100 Figure 1 Figure 2 Interchanges are a fact of life for transmission repair. Maybe you can t get the original part anymore; maybe you just can
STREET SMART by Mike Brown Interchanges for the E4OD and 4R100 Figure 1 Figure 2 Interchanges are a fact of life for transmission repair. Maybe you can t get the original part anymore; maybe you just can
Char-Griller Smokin Pro Modifications
 Char-Griller Smokin Pro Modifications By Phil Lee aka HawgHeaven Right out of the box, the Char-Griller Smokin Pro has a few design deficiencies that need to be addressed, and are fairly easy to remedy.
Char-Griller Smokin Pro Modifications By Phil Lee aka HawgHeaven Right out of the box, the Char-Griller Smokin Pro has a few design deficiencies that need to be addressed, and are fairly easy to remedy.
Lesson Plan: Electricity and Magnetism (~100 minutes)
") Lesson Plan: Electricity and Magnetism (~100 minutes) Concepts 1. Electricity and magnetism are fundamentally related. 2. Just as electric charge produced an electric field, electric current produces a
Lesson Plan: Electricity and Magnetism (~100 minutes) Concepts 1. Electricity and magnetism are fundamentally related. 2. Just as electric charge produced an electric field, electric current produces a
PT 709 firing pin and extractor removal. Disclaimer: My Taurus manual says not to take this apart (just flush it with cleaner).
.") PT 709 firing pin and extractor removal. Disclaimer: My Taurus manual says not to take this apart (just flush it with cleaner). But several list members have done this without ill effect. So here goes:
PT 709 firing pin and extractor removal. Disclaimer: My Taurus manual says not to take this apart (just flush it with cleaner). But several list members have done this without ill effect. So here goes:
9.03 Fact Sheet: Avoiding & Minimizing Impacts
 9.03 Fact Sheet: Avoiding & Minimizing Impacts The purpose of this Student Worksheet is to acquaint you with the techniques of emergency maneuvering, to help you develop the ability to recognize the situations
9.03 Fact Sheet: Avoiding & Minimizing Impacts The purpose of this Student Worksheet is to acquaint you with the techniques of emergency maneuvering, to help you develop the ability to recognize the situations
THE LEGO MINDSTORMS NXT ZOO! an unofficial, kid-friendly guide to building robotic animals with LEGO MINDSTORMS NXT. fay rhodes
 THE LEGO MINDSTORMS NXT ZOO! an unofficial, kid-friendly guide to building robotic animals with LEGO MINDSTORMS NXT fay rhodes 5 spiderbot: an NXT spider Spiderbot is a walking eight-legged spider that
THE LEGO MINDSTORMS NXT ZOO! an unofficial, kid-friendly guide to building robotic animals with LEGO MINDSTORMS NXT fay rhodes 5 spiderbot: an NXT spider Spiderbot is a walking eight-legged spider that
By Bob Markiewicz. Figure 1. Figure 2
 can greatly help you develop horsepower and better understand ignition timing. By understanding the mixture burns at a slow rate, compared to an explosion, and knowing that by increasing this burn rate
can greatly help you develop horsepower and better understand ignition timing. By understanding the mixture burns at a slow rate, compared to an explosion, and knowing that by increasing this burn rate
INSTRUCTION MANUAL. BatteryMINDer. Model SCC515 Maintenance Charger- Solar Controller for use with 5 Watt and 15 Watt Solar Panels
 INSTRUCTION MANUAL Model Maintenance Charger- Solar Controller for use with 5 Watt and 15 Watt Solar Panels OVERVIEW... 2 MOUNTING INSTRUCTIONS... 3 BATTERY CONDITION INDICATOR (BCI)... 5 TESTING BATTERY...
INSTRUCTION MANUAL Model Maintenance Charger- Solar Controller for use with 5 Watt and 15 Watt Solar Panels OVERVIEW... 2 MOUNTING INSTRUCTIONS... 3 BATTERY CONDITION INDICATOR (BCI)... 5 TESTING BATTERY...
- Split - Device (details)
") Power - Split - Device (details) This device, usually referred as the PSD, is the core of the fulll hybrid system in Prius. It is how the gasoline engine and two electric motors are connected. And because
Power - Split - Device (details) This device, usually referred as the PSD, is the core of the fulll hybrid system in Prius. It is how the gasoline engine and two electric motors are connected. And because
Physics 144 Chowdary How Things Work. Lab #5: Circuits
 Physics 144 Chowdary How Things Work Spring 2006 Name: Partners Name(s): Lab #5: Circuits Introduction In today s lab, we ll learn about simple electric circuits. All electrical and electronic appliances
Physics 144 Chowdary How Things Work Spring 2006 Name: Partners Name(s): Lab #5: Circuits Introduction In today s lab, we ll learn about simple electric circuits. All electrical and electronic appliances
RANGE ROVER HYBRID FREQUENTLY ASKED QUESTIONS HYBRID PERFORMANCE AND EFFICIENCY
 HYBRID PERFORMANCE AND EFFICIENCY What is the performance like in a Range Rover Hybrid? Performance is increased compared to the non-hybrid V6 diesel models. This is because when the driver needs additional
HYBRID PERFORMANCE AND EFFICIENCY What is the performance like in a Range Rover Hybrid? Performance is increased compared to the non-hybrid V6 diesel models. This is because when the driver needs additional
TONY S TECH REPORT. Basic Training
 TONY S TECH REPORT (Great Articles! Collect Them All! Trade them with your friends!) Basic Training OK YOU MAGGOTS!! Line up, shut up, and listen good. I don t want any of you gettin killed because you
TONY S TECH REPORT (Great Articles! Collect Them All! Trade them with your friends!) Basic Training OK YOU MAGGOTS!! Line up, shut up, and listen good. I don t want any of you gettin killed because you
Tutorial. Running a Simulation If you opened one of the example files, you can be pretty sure it will run correctly out-of-the-box.
 Tutorial PowerWorld is a great and powerful utility for solving power flows. As you learned in the last few lectures, solving a power system is a little different from circuit analysis. Instead of being
Tutorial PowerWorld is a great and powerful utility for solving power flows. As you learned in the last few lectures, solving a power system is a little different from circuit analysis. Instead of being
How I installed new brake pads on my i with Sport Package (should be fine for other E39 s) By Robert B.
 By Robert B.") How I installed new brake pads on my 1999 528i with Sport Package (should be fine for other E39 s) How I installed new brake pads on my 1999 528i with Sport Package (should be fine for other E39 s) By
How I installed new brake pads on my 1999 528i with Sport Package (should be fine for other E39 s) How I installed new brake pads on my 1999 528i with Sport Package (should be fine for other E39 s) By
AURORA SERIES GAUGES FUEL GAUGE SUGGESTED TOOLS AND MATERIALS. 3 3 /8 in (85.7 mm) PARTS LIST
 PARTS LIST") GAUGE INSTALLATION. Select mounting locations for the fuel gauge. 2. Cut a 2 /6 (52 mm) diameter hole for the gauge and test for proper fitmate. 3. Tighten the gauge with the enclosed Aurora Mounting Clamp
GAUGE INSTALLATION. Select mounting locations for the fuel gauge. 2. Cut a 2 /6 (52 mm) diameter hole for the gauge and test for proper fitmate. 3. Tighten the gauge with the enclosed Aurora Mounting Clamp
elabtronics Voltage Switch
 elabtronics Voltage Switch Want to trigger a device when a monitored voltage, temperature or light intensity reaches a certain value? The elabtronics Voltage Switch is an incredibly easy way of doing it.
elabtronics Voltage Switch Want to trigger a device when a monitored voltage, temperature or light intensity reaches a certain value? The elabtronics Voltage Switch is an incredibly easy way of doing it.
CHAPTER 2. Current and Voltage
 CHAPTER 2 Current and Voltage The primary objective of this laboratory exercise is to familiarize the reader with two common laboratory instruments that will be used throughout the rest of this text. In
CHAPTER 2 Current and Voltage The primary objective of this laboratory exercise is to familiarize the reader with two common laboratory instruments that will be used throughout the rest of this text. In
LEGO Education WeDo 2.0 Toolbox
 LEGO Education WeDo 2.0 Toolbox WeDo 2.0 Table of Contents Program with WeDo 2.0 3-21 Build with WeDo 2.0 22-36 Program with WeDo 2.0 Programming is an important part of twenty-first century learning,
LEGO Education WeDo 2.0 Toolbox WeDo 2.0 Table of Contents Program with WeDo 2.0 3-21 Build with WeDo 2.0 22-36 Program with WeDo 2.0 Programming is an important part of twenty-first century learning,
FLEET SAFETY. Drive to the conditions
 FLEET SAFETY Drive to the conditions Welcome Welcome to Fleet Safety training. This module examines driving at an appropriate speed, known as driving to the conditions. This module will take 10 minutes
FLEET SAFETY Drive to the conditions Welcome Welcome to Fleet Safety training. This module examines driving at an appropriate speed, known as driving to the conditions. This module will take 10 minutes
Rear Speaker replacement.
 Rear Speaker replacement. First off you need the right rear speakers. The easy bit is 6x9 and better than a 15W paper cone, the difficult bit is getting a mounting depth under 74mm. Or to be more precise,
Rear Speaker replacement. First off you need the right rear speakers. The easy bit is 6x9 and better than a 15W paper cone, the difficult bit is getting a mounting depth under 74mm. Or to be more precise,
Robot Preparation for the VEX World Championship/ US Open. Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year
 Robot Preparation for the VEX World Championship/ US Open Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year Re-designing Re-designing your robot to a new concept yields
Robot Preparation for the VEX World Championship/ US Open Lessons learned over the past 6 years by David Kelly 2013 VWC, Teacher of the Year Re-designing Re-designing your robot to a new concept yields
Safe Braking on the School Bus Advanced BrakingTechniques and Practices. Reference Guide and Test by Video Communications
 Safe Braking on the School Bus Advanced BrakingTechniques and Practices Reference Guide and Test by Video Communications Introduction Brakes are considered one of the most important items for school bus
Safe Braking on the School Bus Advanced BrakingTechniques and Practices Reference Guide and Test by Video Communications Introduction Brakes are considered one of the most important items for school bus
The challenges of driving
 Driving is not that easy 32 Some facts about new solo drivers 34 The challenges of driving The challenges of driving 29 The challenges of driving month in Victoria in casualty crashes per (over a 6 year
Driving is not that easy 32 Some facts about new solo drivers 34 The challenges of driving The challenges of driving 29 The challenges of driving month in Victoria in casualty crashes per (over a 6 year
Fourth Grade. Multiplication Review. Slide 1 / 146 Slide 2 / 146. Slide 3 / 146. Slide 4 / 146. Slide 5 / 146. Slide 6 / 146
 Slide 1 / 146 Slide 2 / 146 Fourth Grade Multiplication and Division Relationship 2015-11-23 www.njctl.org Multiplication Review Slide 3 / 146 Table of Contents Properties of Multiplication Factors Prime
Slide 1 / 146 Slide 2 / 146 Fourth Grade Multiplication and Division Relationship 2015-11-23 www.njctl.org Multiplication Review Slide 3 / 146 Table of Contents Properties of Multiplication Factors Prime
ROBOTICS BUILDING BLOCKS
 ROBOTICS BUILDING BLOCKS 2 CURRICULUM MAP Page Title...Section Estimated Time (minutes) Robotics Building Blocks 0 2 Imaginations Coming Alive 5...Robots - Changing the World 5...Amazing Feat 5...Activity
ROBOTICS BUILDING BLOCKS 2 CURRICULUM MAP Page Title...Section Estimated Time (minutes) Robotics Building Blocks 0 2 Imaginations Coming Alive 5...Robots - Changing the World 5...Amazing Feat 5...Activity
Only use if safe to do so and at your own risk.
 This product may not be suitable or safe for road usage. The owner accepts ALL responsibility for its use and installation. The product must not be used if malfunction occurs, a suspected malfunction occurs
This product may not be suitable or safe for road usage. The owner accepts ALL responsibility for its use and installation. The product must not be used if malfunction occurs, a suspected malfunction occurs
LeafBox manual, v How to set the LeafBox?
 LeafBox manual, v1.0 LeafBox should be installed to accelerator pedal plug of Nissan Leaf. It does not matter generation or year of production, but there are various settings depend on your driving mood,
LeafBox manual, v1.0 LeafBox should be installed to accelerator pedal plug of Nissan Leaf. It does not matter generation or year of production, but there are various settings depend on your driving mood,
SMART PASSENGER TRANSPORT
 World Robot Olympiad 2019 Regular Category Elementary SMART CITIES SMART PASSENGER TRANSPORT Version: January 15 th WRO International Premium Partners Table of Contents 1. Introduction... 2 2. Game Field...
World Robot Olympiad 2019 Regular Category Elementary SMART CITIES SMART PASSENGER TRANSPORT Version: January 15 th WRO International Premium Partners Table of Contents 1. Introduction... 2 2. Game Field...
How to Become A Formula Vee Race Driver
 How to Become A Formula Vee Race Driver Cams Licence To race a Formula Vee you will need a Cams racing licence. You can find the application form in our members area on our website under racing forms.
How to Become A Formula Vee Race Driver Cams Licence To race a Formula Vee you will need a Cams racing licence. You can find the application form in our members area on our website under racing forms.
Module 3: Wheel & Axle
 Technology Exploration-I Module 3: Wheel & Axle PREPARED BY Curriculum Development Unit August 2013 Applied Technology High Schools, 2013 Module 3: Wheel & Axle Module Objectives After the completion of
Technology Exploration-I Module 3: Wheel & Axle PREPARED BY Curriculum Development Unit August 2013 Applied Technology High Schools, 2013 Module 3: Wheel & Axle Module Objectives After the completion of
Mini EV Prize Solar Car Kit
 Mini EV Prize Solar Car Kit Each Kit includes 2 x Solar Panels 8 x Wheels 4 x 50mm, 4 x 40mm 2 x Axels (short & long) & 4 x Axel Collars 1 x Motor - F18 & 3D printed mount 2 x Large Spur Gear 60T & 48T
Mini EV Prize Solar Car Kit Each Kit includes 2 x Solar Panels 8 x Wheels 4 x 50mm, 4 x 40mm 2 x Axels (short & long) & 4 x Axel Collars 1 x Motor - F18 & 3D printed mount 2 x Large Spur Gear 60T & 48T
Straight Lines and Course Adjustments
 1ST U.S. R/C FIGHT SCHOO Straight ines and Course Adjustments A-6 27 9 Straight ines and Course Adjustments In this section: A-8 & 9 illustrate how small aileron bumps or nudges are used for making small
1ST U.S. R/C FIGHT SCHOO Straight ines and Course Adjustments A-6 27 9 Straight ines and Course Adjustments In this section: A-8 & 9 illustrate how small aileron bumps or nudges are used for making small
Tuning A Walbro Carb. Walbro Carb TUNE UP & Illustrated Guide
 Tuning A Walbro Carb Walbro Carb TUNE UP & Illustrated Guide by M. B. Fuess Walbro carbs aren t too difficult to tune up if you know what you re doing. First of all, you need to know how the carb works
Tuning A Walbro Carb Walbro Carb TUNE UP & Illustrated Guide by M. B. Fuess Walbro carbs aren t too difficult to tune up if you know what you re doing. First of all, you need to know how the carb works
Quick user guide for the DM dispenser
 Quick user guide for the DM dispenser READ FIRST! Use the shortest/thickest USB cable possible, if the screen dims too much during operation (to the point where it s hard to read the text) your cable or
Quick user guide for the DM dispenser READ FIRST! Use the shortest/thickest USB cable possible, if the screen dims too much during operation (to the point where it s hard to read the text) your cable or
[0. Title] Biased Weight Alignment Procedure for Bent Axle Alignment by Stan Pope, 4 August 2013
![[0. Title] Biased Weight Alignment Procedure for Bent Axle Alignment by Stan Pope, 4 August 2013](/thumbs/87/96968278.jpg "[0. Title] Biased Weight Alignment Procedure for Bent Axle Alignment by Stan Pope, 4 August 2013") [0. Title] Biased Weight Alignment Procedure for Bent Axle Alignment by Stan Pope, 4 August 2013 [1] Hello, pinewood derby racers! I'm Stan Pope. For a lot of years, I've been helping youngsters and their
[0. Title] Biased Weight Alignment Procedure for Bent Axle Alignment by Stan Pope, 4 August 2013 [1] Hello, pinewood derby racers! I'm Stan Pope. For a lot of years, I've been helping youngsters and their
Self-Concept. The total picture a person has of him/herself. It is a combination of:
 SELF CONCEPT Self-Concept The total picture a person has of him/herself. It is a combination of: traits values thoughts feelings that we have for ourselves (self-esteem) Self-Esteem Feelings you have for
SELF CONCEPT Self-Concept The total picture a person has of him/herself. It is a combination of: traits values thoughts feelings that we have for ourselves (self-esteem) Self-Esteem Feelings you have for
Prusa i3 Printer Assembly Guide
 Prusa i3 Printer Assembly Guide Special thanks to Carlos Sanchez and Miguel Sanchez for the graphics. All graphics captured from their great animation: http://www.carlos-sanchez.com/ Prusa3/ For copyright
Prusa i3 Printer Assembly Guide Special thanks to Carlos Sanchez and Miguel Sanchez for the graphics. All graphics captured from their great animation: http://www.carlos-sanchez.com/ Prusa3/ For copyright
Could be a damaged Rain Tracker interface module. See Bypassing the Rain Tracker on the next page.
 Rain Tracker RT-50A Troubleshooting Procedure Motor Switching Applications This procedure is for Rain Tracker installations that apply current directly to the wiper motor. For example, HSS (Hot Side Switching)
Rain Tracker RT-50A Troubleshooting Procedure Motor Switching Applications This procedure is for Rain Tracker installations that apply current directly to the wiper motor. For example, HSS (Hot Side Switching)