Soviet Lunokhod 1 and 2 missions and things around
|
|
|
- Terence Mason
- 6 years ago
- Views:
Transcription
1 Soviet Lunokhod 1 and 2 missions and things around Alexander Basilevsky Vernadsky Institute of Geochemistry and Analytical Chemistry Russian Academy of Sciences, Moscow, Russia and Department of Geological Sciences Brown University, Providence, RI, USA MicroRover Space Horizons Workshop Brown University, School of Engineering February 16, 2012
2 Lunokhod 1 and 2 rovers and scientific instruments on them

3 Space race to the Moon Cold war time flights to the Moon Lunokhod 11 Lunokhod 2 2 USSR Attempts 48 Successful 21 USA Attempts 31 Successful 22 From Huntress, Moroz, Shevalev, 2003

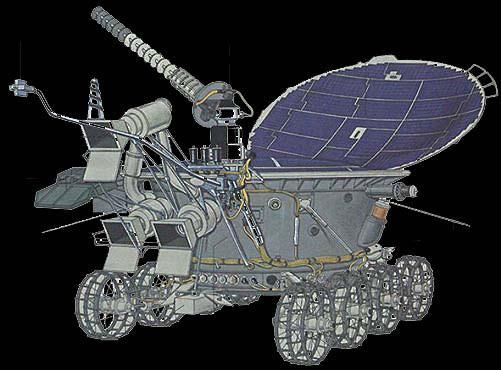
4 Lunokhod 1 Mass 750 kg Payload 105 kg Speed 0.8 to 2 km / hour


5 Lunokhod 1 payload Frame & Panoramic TV cameras RIFMA X-ray Fluorescence Spectrometer X-ray Telescope PROP Soil Mechanics Sensor Radiation Detector Laser Retroreflector PROP 9 th wheel

6 Frame & Panoramic TV cameras RIFMA X-ray Fluorescence Spectrometer X-ray Telescope PROP Soil Mechanics Sensor Radiation Detector Laser Retroreflector UV/Visible Astrophotometer Magnetometer Photodetector Lunokhod 2 and its payload
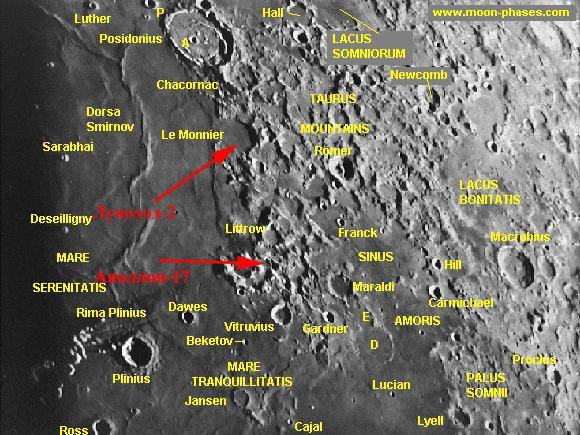
7 Lunokhod 1 and 2 missions

8 Lunokhod 1 Lunokhod 2 November 17, 1970 Mare Imbrium January 16, 1973 Crater LeMonier Mare Serenitatis
9

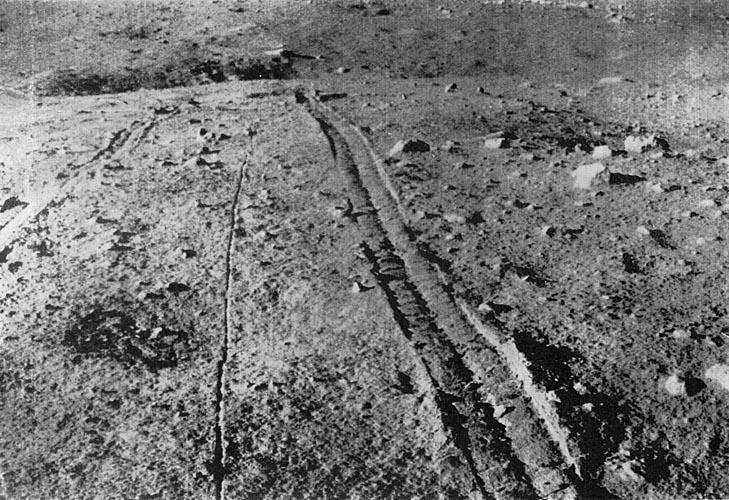
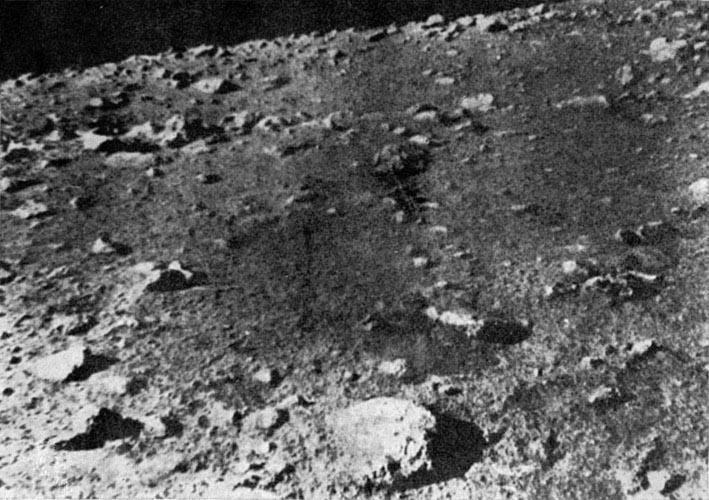
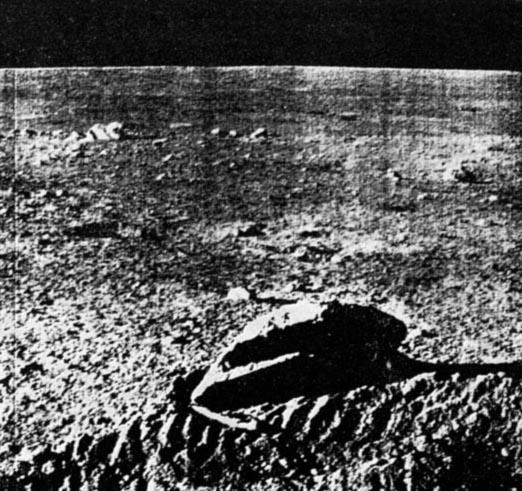


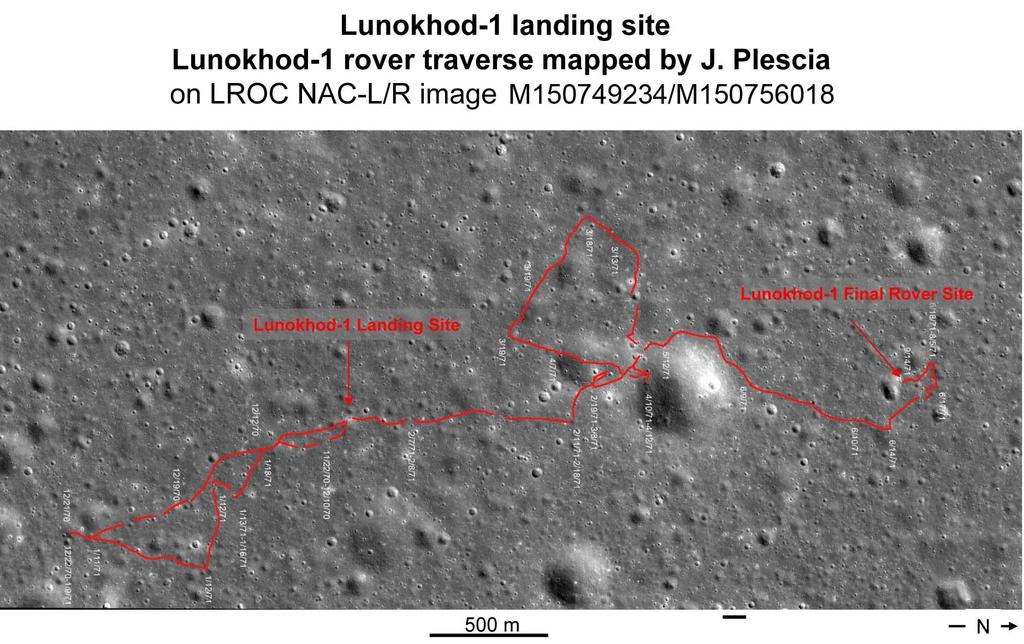
10 Lunokhod 1 landscapes
11 traveled 10,540 m, Lunokhod 1 sent to Earth more than 50,000 pictures of the navigation TV cameras and more than 200 TV panoramas, conducted more than 500 lunar soil mechanics tests, made numerous measurements of the chemical composition of the soil by X-ray-fluorescence technique, it also had the French-made laser retroreflector for high-precision measurements of the distances between the Moon and Earth.
12

13 Lunokhod -1 traverse Lunokhod -2 traverse


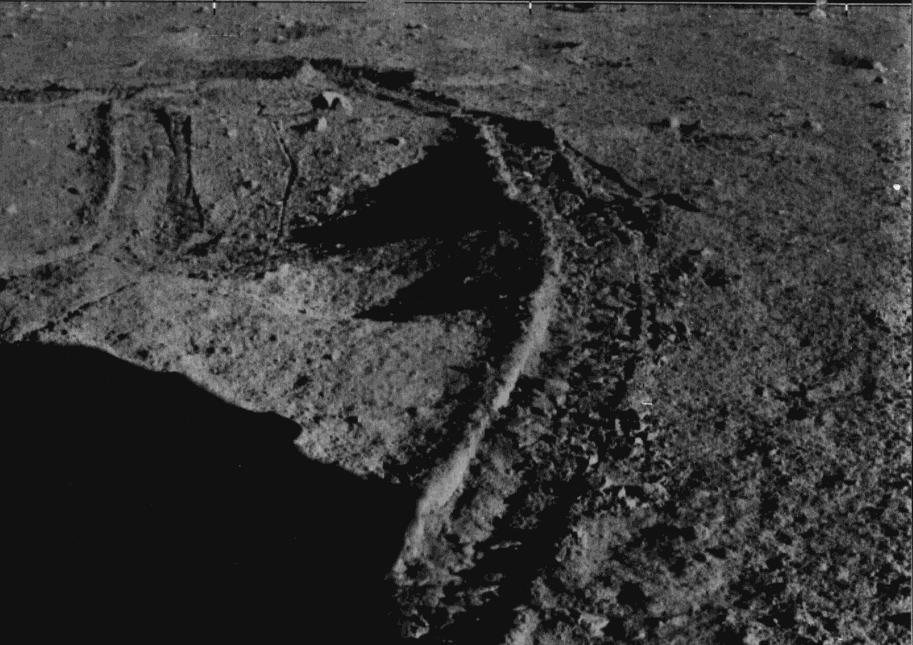

14 Lunokhod 2 landscapes
15 Lunokhod 2 traveled 37,450 m, partly along the mare-like surface, partly intruding into hilly terrain of highland type and studying the edges of a 15 km long tectonic trough sent to Earth more than 80,000 pictures of the navigation TV cameras and 86 TV panoramas, conducted more than 150 lunar soil mechanics tests, conducted numerous chemical analyses, made numerous magnetometric measiurements, using a photometric standard in the field of view of the panoramic TV cameras measured albedo of various landforms, using special up-looking photometer studied brightness of the night sky of the Moon as indicator of levitated dust.
16 The analysis of TV images led to better understanding of the geologic and geophysical processes on the Moon: It was found that the surface gardening by meteorite impacts was accompanied by a variety of down-slope mass-wasting phenomena. Joint consideration of local geology, measurements of the soil mechanics, chemical composition and soil albedo led to conclusions on lateral and vertical mixing of lunar mare and highland materials. Magnetic measurements along the route and on the observation stations led to discovery of small spots of residual magnetization probably formed by the impacts. Analysis of time variations of the interplanetary magnetic field also registered by the magnetometer led to estimates of the large-scale (100 s km) structure of the Moon interior.
17 Lunokhod 1 and 2 control center


18 High-gain antenna operator Driver Commander



19
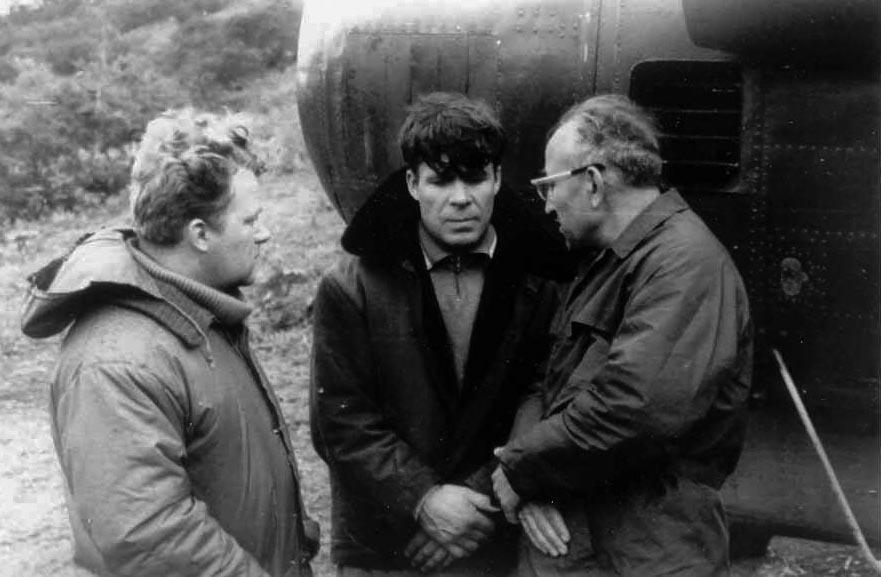
20 Lunokhod crew and their chiefs

21 Five days after landing of Lunokhod 1



22 Alexander Kemurdzhian, Chief Designer of Lunokhods Georgii Babakin, Chief Designer of Lavochkin Association Alexander Kemurdzhian, Ivan Kozhedub, WW2 Hero, Oleg Ivanovsky, Deputy Chief Designer of Lavochkin Assoiciation





23 Oleg Ivanovsky: WW2, work at NPO Energia, escorted Gagarin, work at Lavochkin NPO
24 Lunokhod tests and crew trainings

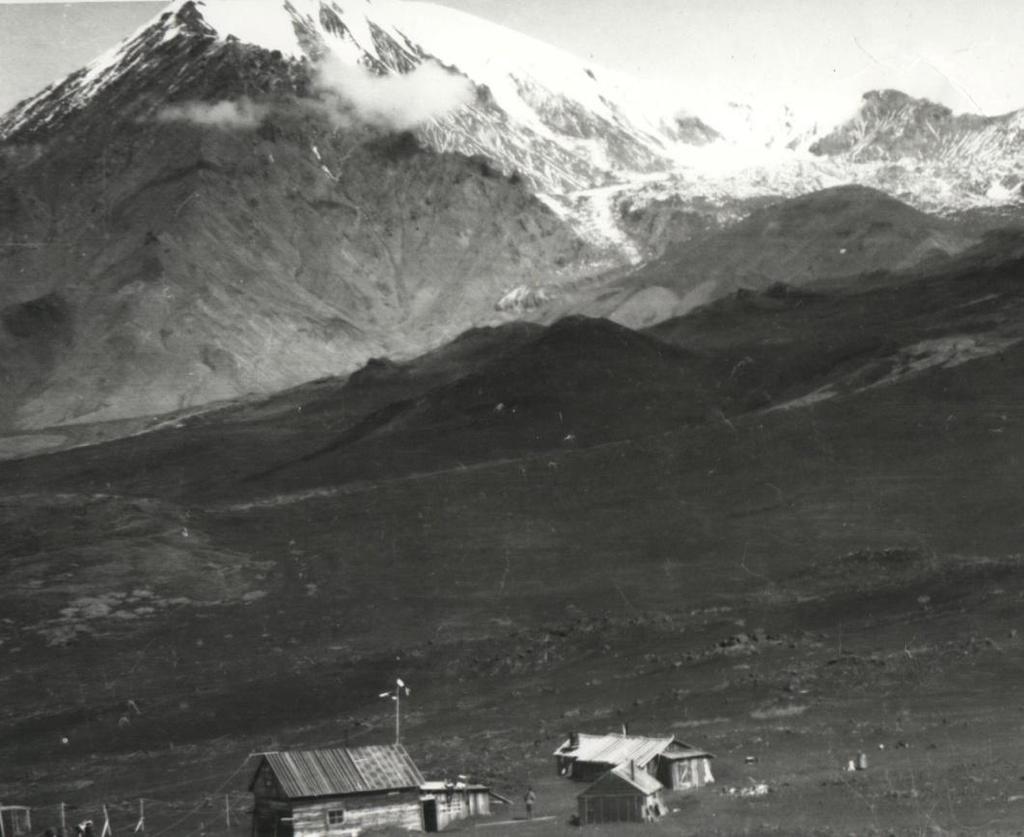
25 Tests in Kamchatka




26 Crew training in Shkol naya
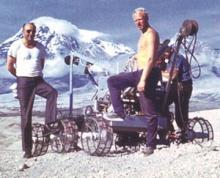
27 Rover s varieties done by VNIITRANSMASH

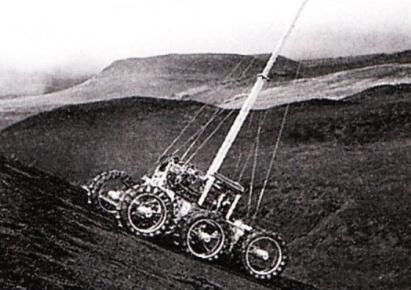
28 Six-wheel version Caterpillar-type version


29 Rover for Mars 71 Hopper for Phobos 2

30 Walking rover

31 Mockup of wheel-walking rover

32 Wheel-walking rover with changing body

33 Clean-up in Chernobyl


34 Tests of Russian Mars rover in Mohave


35 Tests of Russian Mars rover in Mohave


36 Rovers of the Future: High trafficability and long lifetime. Reasonable self-dependence. Ability to study targets of interest: - Contact analyses using robotic arm. - Remote analyses with laser and so on. Combination of rover(s) with sample return.
37 Vyacheslav Dovgan, Anton Ivanov, Emily Stewart Lakdawalla, Juergen Oberst and Jennifer Vaughn provided valuable images and other information. Enormous help was provided by Mikhail Malenkov, close associate of Alexander Kemurdzhian. Prof. Mikhail Malenkov can be achieved for questions and discussion by Thank you for your attention! This presentation can bt downloaded from:
350 International Atlas of Lunar Exploration
 :UP/3-PAGINATION/IAW-PROOFS/3B2/978«52181«5(M.3D 3 5 0 [7428] 19.8.20073:28PM 350 International Atlas of Lunar Exploration 8 January 1973: Luna 21 and Lunokhod 2 (Soviet Union) The 4850 kg Luna 21 spacecraft
:UP/3-PAGINATION/IAW-PROOFS/3B2/978«52181«5(M.3D 3 5 0 [7428] 19.8.20073:28PM 350 International Atlas of Lunar Exploration 8 January 1973: Luna 21 and Lunokhod 2 (Soviet Union) The 4850 kg Luna 21 spacecraft
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, GMT
 Friday, October 30, GMT") Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Initial Concept Review Team Alpha ALUM Rover (Astronaut Lunar Utility Mobile Rover) Friday, October 30, 2009 1830-2030 GMT Rover Requirements/Capabilities Performance Requirements Keep up with an astronaut
Light-Lift Rocket II
 Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
Light-Lift Rocket I Light-Lift Rocket II Medium-Lift Rocket A 0 7 00 4 MASS 90 MASS MASS This rocket can lift a mission that has up to 4 mass units. This rocket can lift a mission that has up to 90 mass
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES
 FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
FEDERAL SPACE AGENCY OF RUSSIAN FEDERATION LAVOCHKIN ASSOCIATION PROGRAM OF THE MOON EXPLORATION BY AUTOMATIC SPACE COMPLEXES 2007 CONCEPT 1. The program foresees development of automatic space complexes
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science
 Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
Cooperative EVA/Telerobotic Surface Operations in Support of Exploration Science David L. Akin http://www.ssl.umd.edu Planetary Surface Robotics EVA support and autonomous operations at all physical scales
WHAT WE WILL DISCUSS IN THIS VIDEO
 WHAT WE WILL DISCUSS IN THIS VIDEO What is Chandrayaan 2 all about? Why is it special? Have we entered the The Asian space race? Where do China, Japan and India stand? What is the importance of the moon?
WHAT WE WILL DISCUSS IN THIS VIDEO What is Chandrayaan 2 all about? Why is it special? Have we entered the The Asian space race? Where do China, Japan and India stand? What is the importance of the moon?
Travel: Detailed Flight Plan
 DarkSide Logistics Lunar Spaceport Initiative Travel: Detailed Flight Plan The payload will be launched from Cape Canaveral Air Force Station Launch Complex 46 at 15:59:35 ET on January 25, 2010, using
DarkSide Logistics Lunar Spaceport Initiative Travel: Detailed Flight Plan The payload will be launched from Cape Canaveral Air Force Station Launch Complex 46 at 15:59:35 ET on January 25, 2010, using
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability
 Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Brief overview of lunar surface environment Examples of rover types and designs Steering systems Static and dynamic stability 2007 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu Lunar
Mars Surface Mobility Proposal
 Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
Mars Surface Mobility Proposal Jeremy Chavez Ryan Green William Mullins Rachel Rodriguez ME 4370 Design I October 29, 2001 Background and Problem Statement In the 1960s, the United States was consumed
ISEM (Infrared Spectrometer for ExoMars)
") ISEM (Infrared Spectrometer for ExoMars) Optical Box (OB) ISEM Electronic Box (EB) ISEM O. Korablev (PI), A. Ivanov (PM) A. Fedorova, N. Evodokimova, S. Mantsevich and the ISEM Team IKI - Space Research
ISEM (Infrared Spectrometer for ExoMars) Optical Box (OB) ISEM Electronic Box (EB) ISEM O. Korablev (PI), A. Ivanov (PM) A. Fedorova, N. Evodokimova, S. Mantsevich and the ISEM Team IKI - Space Research
From MARS To MOON. V. Giorgio Director of Italian Programs. Sorrento, October, All rights reserved, 2007, Thales Alenia Space
 From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
From MARS To MOON Sorrento, October, 2007 V. Giorgio Director of Italian Programs Page 2 Objectives of this presentation is to provide the Lunar Exploration Community with some information and status of
 Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Mission to Mars: Project Based Learning Previous, Current, and Future Missions to Mars Dr. Anthony Petrosino, Department of Curriculum and Instruction, College of Education, University of Texas at Austin
Planetary Surface Transportation and Site Development
 Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Planetary Surface Transportation and Site Development Larry Bell * Sasakawa International Center for Space Architecture (SICSA), Houston, TX 77204-4000 This paper presents considerations and concepts for
Industrial-and-Research Lunar Base
 Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
Industrial-and-Research Lunar Base STRATEGY OF LUNAR BASE CREATION Phase 1 Preparatory: creation of international cooperation, investigation of the Moon by unmanned spacecraft, creation of space transport
NEXT Exploration Science and Technology Mission. Relevance for Lunar Exploration
 NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
NEXT Exploration Science and Technology Mission Relevance for Lunar Exploration Alain Pradier & the NEXT mission team ILEWG Meeting, 23 rd September 2007, Sorrento AURORA PROGRAMME Ministerial Council
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers
 Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
Edible Rovers Activity High School Edible Rover Worksheet Geometry Answers Instructions You have just been notified that NASA is planning to launch another Mars Rover Mission and you are going to design
Rediscovery of the Lunokhod 1 Reflector
 Rediscovery of the Lunokhod 1 Reflector What it means for Lunar Ranging Science Tom Murphy (PI) Eric L. Michelsen UCSD and the APOLLO Collaboration Background photo: Dan Long Introduction to APOLLO APOLLO
Rediscovery of the Lunokhod 1 Reflector What it means for Lunar Ranging Science Tom Murphy (PI) Eric L. Michelsen UCSD and the APOLLO Collaboration Background photo: Dan Long Introduction to APOLLO APOLLO
w. David Carrier, III
 BOARD OF TRUSTEES Brig. Gen. Charles M. Duke, Jr. USAF Ret. Apollo 16 Astronaut Dr. Valery V. Gromov Mobile Vehicle Engineering St. Petersburg, Russia Dr. Grant Heiken University or California Los Alamos
BOARD OF TRUSTEES Brig. Gen. Charles M. Duke, Jr. USAF Ret. Apollo 16 Astronaut Dr. Valery V. Gromov Mobile Vehicle Engineering St. Petersburg, Russia Dr. Grant Heiken University or California Los Alamos
Challenges of Designing the MarsNEXT Network
 Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Challenges of Designing the MarsNEXT Network IPPW-6, Atlanta, June 26 th, 2008 Kelly Geelen kelly.geelen@astrium.eads.net Outline Background Mission Synopsis Science Objectives and Payload Suite Entry,
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012
 Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Moon Exploration Lunar Polar Sample Return ESA Thematic information day BELSPO, 3 July 2012 Human Spaceflight and Operations (HSO)) 1 Introduction Moon Exploration has a very high priority in Roscosmos
Two Related Primary Challenges for Successful Renewed Lunar Exploration
 Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Two Related Primary Challenges for Successful Renewed Lunar Exploration October 10, 2017 Presented By Ron Creel Retired Apollo Lunar Roving Vehicle Team Member OUTLINE Challenge 1 Coping with Exposure
Lunar Architecture and LRO
 Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Lunar Architecture and LRO Lunar Exploration Background Since the initial Vision for Space Exploration, NASA has spent considerable time defining architectures to meet the goals Original ESAS study focused
Good afternoon. We're going to be talking today about frontiers of imagination in space exploration
 Good afternoon. We're going to be talking today about frontiers of imagination in space exploration First, though, I want to introduce myself. My name is Loretta Hall, and I'm a space buff. I've been a
Good afternoon. We're going to be talking today about frontiers of imagination in space exploration First, though, I want to introduce myself. My name is Loretta Hall, and I'm a space buff. I've been a
THE HISTORY OF MARS EXPLORATION
 THE HISTORY OF MARS EXPLORATION Philippe Masson 1st Mars Express Science Conference (ESTEC, February 21-25, 2005) Mars Observers: The European Pioneers Nicolaus Copernicus: described the motion of the
THE HISTORY OF MARS EXPLORATION Philippe Masson 1st Mars Express Science Conference (ESTEC, February 21-25, 2005) Mars Observers: The European Pioneers Nicolaus Copernicus: described the motion of the
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE
 INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
INTERNATIONAL LUNAR NETWORK ANCHOR NODES AND ROBOTIC LUNAR LANDER PROJECT UPDATE NASA/ Barbara Cohen Julie Bassler Greg Chavers Monica Hammond Larry Hill Danny Harris Todd Holloway Brian Mulac JHU/APL
On the feasibility of a fast track return to Mars
 On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
On the feasibility of a fast track return to Mars Mars Lander(s) 2011 Mars Demonstration Landers (MDL) Page 1 Technology Demonstrators SMART 1 SMART 2 LISA PF Solar Electric Propulsion Drag Free Control
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity
 The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
The Study of Locomotion of Small Wheeled Rovers: The MIDD Activity L. Richter 1, M.C. Bernasconi 2, P. Coste 3 1: Institute of Space Simulation, D-51170 Cologne, Germany 2: Contraves Space, CH-8052 Zurich,
Lunar Science and Infrastructure with the Future Lunar Lander
 ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
ICEUM9 Sorrento Lunar Science and Infrastructure with the Future Lunar Lander Session 9: Next steps for Robotic Landers, Rovers and Outposts ICEUM9 Sorrento, Oct. 26, 2007 Hansjürgen Günther 26/10/2007
RESULTS of ESA/ESTEC and VNII Transmash & RCL joint ACTIVITIES AIMED at PLANETARY ROVERS DEVELOPMENT
 In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 RESULTS of and VNII Transmash &
In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 RESULTS of and VNII Transmash &
Innovative Mars exploration rover using inflatable or unfolding wheels
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Innovative Mars exploration rover
Massachusetts Space Grant Consortium
 Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
Massachusetts Space Grant Consortium Distinguished Lecturer Series NASA Administrator Dr. Michael Griffin NASA s Exploration Architecture March 8, 2006 Why We Explore Human curiosity Stimulates our imagination
An Overview of CSA s s Space Robotics Activities
 An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
An Overview of CSA s s Space Robotics Activities Erick Dupuis, Mo Farhat ASTRA 2011 ESTEC, Noordwijk, The Netherlands Introduction Key Priority Area for CSA Recent Reorganisation Strategy Guided by Global
Abstract #1756. English. French. Author(s) and Co Author(s) ispace & Team Hakuto s 2017 Lunar Mission
 and Co Author(s) ispace & Team Hakuto s 2017 Lunar Mission") 4/25/2017 CIM TPMS Abstract #1756 English ispace & Team Hakuto s 2017 Lunar Mission This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, and Team Hakuto,
4/25/2017 CIM TPMS Abstract #1756 English ispace & Team Hakuto s 2017 Lunar Mission This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, and Team Hakuto,
Name: Space Exploration PBL
 Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Name: Space Exploration PBL Students describe the history and future of space exploration, including the types of equipment and transportation needed for space travel. Students design a lunar buggy and
Next Steps in Human Exploration: Cislunar Systems and Architectures
 Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
Next Steps in Human Exploration: Cislunar Systems and Architectures Matthew Duggan FISO Telecon August 9, 2017 2017 The Boeing Company Copyright 2010 Boeing. All rights reserved. Boeing Proprietary Distribution
European Lunar Lander: System Engineering Approach
 human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
human spaceflight & operations European Lunar Lander: System Engineering Approach SECESA, 17 Oct. 2012 ESA Lunar Lander Office European Lunar Lander Mission Objectives: Preparing for Future Exploration
RIMRES: A project summary
 RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
RIMRES: A project summary at ICRA 2013 -- Planetary Rovers Workshop presented by Thomas M Roehr, thomas.roehr@dfki.de DFKI Robotics Innovation Center Bremen Robert-Hooke Straße 5 28359 Bremen 1 Acknowledgements
Adrestia. A mission for humanity, designed in Delft. Challenge the future
 Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
Adrestia A mission for humanity, designed in Delft 1 Adrestia Vision Statement: To inspire humanity by taking the next step towards setting a footprint on Mars Mission Statement Our goal is to design an
AN EDUTAINMENT BASED LUNAR MISSION AND RELATED SPECTRUM ISSUES
 AN EDUTAINMENT BASED LUNAR MISSION AND RELATED SPECTRUM ISSUES DEEPAK BAPNA AND WILLIAM WHITTAKER The Robotics Institute, Carnegie Mellon University, 5000 Forbes Ave, Pittsburgh PA 15213 E-mail: deepak@ri.cmu.edu
AN EDUTAINMENT BASED LUNAR MISSION AND RELATED SPECTRUM ISSUES DEEPAK BAPNA AND WILLIAM WHITTAKER The Robotics Institute, Carnegie Mellon University, 5000 Forbes Ave, Pittsburgh PA 15213 E-mail: deepak@ri.cmu.edu
Microbots for Large-Scale Planetary Surface and Subsurface Exploration
 Microbots for Large-Scale Planetary Surface and Subsurface Exploration Steven Dubowsky, Principal Investigator Karl Iagnemma, Co-Investigator Field and Space Robotics Laboratory Massachusetts Institute
Microbots for Large-Scale Planetary Surface and Subsurface Exploration Steven Dubowsky, Principal Investigator Karl Iagnemma, Co-Investigator Field and Space Robotics Laboratory Massachusetts Institute
Long-Range Rovers for Mars Exploration and Sample Return
 2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
2001-01-2138 Long-Range Rovers for Mars Exploration and Sample Return Joe C. Parrish NASA Headquarters ABSTRACT This paper discusses long-range rovers to be flown as part of NASA s newly reformulated Mars
Exploration Architecture Update
 Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
Exploration Architecture Update Doug Cooke Deputy Associate Administrator Exploration Systems Mission Directorate John Connolly Vehicle Engineering and Integration Lunar Lander Project Office March 14,
Curiosity lands on Mars
 Curiosity lands on Mars Early Monday morning (August 6, 2012), the Mars rover named Curiosity successfully landed on the surface of Mars. The rover launched on November 26 th, 2011 and traveled for 8 ½
Curiosity lands on Mars Early Monday morning (August 6, 2012), the Mars rover named Curiosity successfully landed on the surface of Mars. The rover launched on November 26 th, 2011 and traveled for 8 ½
Design of a Day/Night Lunar Rover
 Design of a Day/Night Lunar Rover CMU-RI-TR-95-24 Peter Berkelman Mei Chen Jesse Easudes John Hancock Martin C. Martin Andrew B. Mor Eric Rollins Alex Sharf Jack Silberman Tom Warren Deepak Bapna The Robotics
Design of a Day/Night Lunar Rover CMU-RI-TR-95-24 Peter Berkelman Mei Chen Jesse Easudes John Hancock Martin C. Martin Andrew B. Mor Eric Rollins Alex Sharf Jack Silberman Tom Warren Deepak Bapna The Robotics
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE
 LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
LUNAR DAYLIGHT EXPLORATION Cost Constrained Human and Robotic Exploration Brand Norman Griffin 1 A.M., ASCE ABSTRACT With 1 rover, 2 astronauts and 3 days, the Apollo 17 Mission covered over 30 km, setup
Aditya.V Mechatronics, MGIT
 Unmanned Terrain with Rocker Bogie Suspension Aditya.V Mechatronics, MGIT Abstract: A rover is a vehicle for driving over rough terrain, especially one driven by remote control over extraterrestrial terrain.
Unmanned Terrain with Rocker Bogie Suspension Aditya.V Mechatronics, MGIT Abstract: A rover is a vehicle for driving over rough terrain, especially one driven by remote control over extraterrestrial terrain.
Japanese Rover Test-bed for Lunar Exploration
 Japanese Rover Test-bed for Lunar Exploration Takashi Kubota*, Yasuharu Kunii**, Yoji Kuroda***, Masatsygu Otsuki* *ISAS/JAXA, 3-1-1, Yoshinodai, Sagamihara 229-8510, JAPAN **Chuo University, 1-13-27,
Japanese Rover Test-bed for Lunar Exploration Takashi Kubota*, Yasuharu Kunii**, Yoji Kuroda***, Masatsygu Otsuki* *ISAS/JAXA, 3-1-1, Yoshinodai, Sagamihara 229-8510, JAPAN **Chuo University, 1-13-27,
Rover development status
 EXOMARS PROJECT 2018 Mission Rover development status ASTRA Workshop 15-17 May 2013 P. Baglioni & the EXM Rover Team Progress on the 2018 Mission Following EXM Program approvals from the Council and IPC
EXOMARS PROJECT 2018 Mission Rover development status ASTRA Workshop 15-17 May 2013 P. Baglioni & the EXM Rover Team Progress on the 2018 Mission Following EXM Program approvals from the Council and IPC
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce
 Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
Building an Economical and Sustainable Lunar Infrastructure To Enable Lunar Science and Space Commerce Dr. Allison Zuniga, Mark Turner and Dr. Dan Rasky NASA Ames Research Center Space Portal Office Mike
Silicon-Germanium Integrated Electronics for Extreme Environments Applied to the Design of a Lunar Hopper
 Silicon-Germanium Integrated Electronics for Extreme Environments Applied to the Design of a Lunar Hopper Presentation to Leora Peltz (Boeing Phantom Works, Huntington Beach CA, USA) leora.peltz@boeing.com,
Silicon-Germanium Integrated Electronics for Extreme Environments Applied to the Design of a Lunar Hopper Presentation to Leora Peltz (Boeing Phantom Works, Huntington Beach CA, USA) leora.peltz@boeing.com,
Lunette: A Global Network of Small Lunar Landers
 Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
Lunette: A Global Network of Small Lunar Landers Leon Alkalai and John O. Elliott Jet Propulsion Laboratory California Institute of Technology LEAG/ILEWG 2008 October 30, 2008 Baseline Mission Initial
LUNAR INDUSTRIAL RESEARCH BASE. Yuzhnoye SDO proprietary
 LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
LUNAR INDUSTRIAL RESEARCH BASE DESCRIPTION Lunar Industrial Research Base is one of global, expensive, scientific and labor intensive projects which is to be implemented by the humanity to meet the needs
Lunar Missions by Year - All Countries. Mission count dropped as we transitioned from politically driven missions to science driven missions
 n Lunar Missions by Year - All Countries Key: All Mission Attempts Mission Successes Mission count dropped as we transitioned from politically driven missions to science driven missions Capability Driven
n Lunar Missions by Year - All Countries Key: All Mission Attempts Mission Successes Mission count dropped as we transitioned from politically driven missions to science driven missions Capability Driven
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region
 MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
MARS-OZ: A Design for a Simulated Mars Base in the Arkaroola Region David Willson (david.willson@au.tenovagroup.com) and Jonathan D. A. Clarke (jon.clarke@bigpond.com), Mars Society Australia The centrepiece
Abstract #1739. English. French. Author(s) and Co Author(s) Mining the Moon with ispace, a Lunar Exploration Company
 and Co Author(s) Mining the Moon with ispace, a Lunar Exploration Company") 4/25/2017 CIM TPMS Abstract #1739 English Mining the Moon with ispace, a Lunar Exploration Company This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, with
4/25/2017 CIM TPMS Abstract #1739 English Mining the Moon with ispace, a Lunar Exploration Company This presentation will introduce ispace, a lunar exploration company headquartered in Tokyo, Japan, with
Phoenix Lander Implications on in situ resource utilization for robotic exploration of Mars
 Phoenix Landing Site May 2008 Phoenix Lander Implications on in situ resource utilization for robotic exploration of Mars LEAG-ICEUM-SRR (2008) Cape Canaveral, FL Robert L. Ash October 29, 2008 Aerospace
Phoenix Landing Site May 2008 Phoenix Lander Implications on in situ resource utilization for robotic exploration of Mars LEAG-ICEUM-SRR (2008) Cape Canaveral, FL Robert L. Ash October 29, 2008 Aerospace
Landing Targets and Technical Subjects for SELENE-2
 Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
Landing Targets and Technical Subjects for SELENE-2 Kohtaro Matsumoto, Tatsuaki Hashimoto, Takeshi Hoshino, Sachiko Wakabayashi, Takahide Mizuno, Shujiro Sawai, and Jun'ichiro Kawaguchi JAXA / JSPEC 2007.10.23
APPENDIX 1: FIGURE 3 COLOR VERSION
 APPENDIX 1: FIGURE 3 COLOR VERSION APPENDIX 2: METHODS: U-Pb DATING OF ZIRCON USING LA-ICP-MS Zircon was extracted from rock samples by conventional crushing, washing, heavy liquids, and magnetic separation
APPENDIX 1: FIGURE 3 COLOR VERSION APPENDIX 2: METHODS: U-Pb DATING OF ZIRCON USING LA-ICP-MS Zircon was extracted from rock samples by conventional crushing, washing, heavy liquids, and magnetic separation
Soviet Lunas and Lunokhods: History of studies and scientific results
 Soviet Lunas and Lunokhods: History of studies and scientific results A.T. Basilevsky Vernadsky Institute of Geochemistry and Analytical Chemistry Russian Academy of Sciences with the help of A.M. Abdrakhimov,
Soviet Lunas and Lunokhods: History of studies and scientific results A.T. Basilevsky Vernadsky Institute of Geochemistry and Analytical Chemistry Russian Academy of Sciences with the help of A.M. Abdrakhimov,
The European Lunar Lander Mission
 The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
The European Lunar Lander Mission Alain Pradier ASTRA Noordwijk, 12 th April 2011 European Space Agency Objectives Programme Objective PREPARATION FOR FUTURE HUMAN EXPLORATION Lunar Lander Mission Objective
3 DESIGN. 3.1 Chassis and Locomotion
 A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
A CANADIAN LUNAR EXPLORATION LIGHT ROVER PROTOTYPE *Ryan McCoubrey (1), Chris Langley (1), Laurie Chappell (1), John Ratti (1), Nadeem Ghafoor (1), Cameron Ower (1), Claude Gagnon (2), Timothy D. Barfoot
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS. Nagin Cox
 THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
THE MARS EXPLORATION ROVERS: HITTING THE ROAD ON MARS Nagin Cox Jet Propulsion Laboratory National Air & Space Administration/California Institute of Technology Email: nagin@jpl.nasa.gov Abstract: Since
Mobile Payload Element (MPE)
") Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Kayser-Threde GmbH Space Industrial Applications Mobile Payload Element (MPE) Concept Study of a small autonomous, and innovative Sample Fetching Rover R. Haarmann 1, Q. Mühlbauer 1, L. Richter 1, S. Klinkner
Canadian Lunar & Planetary Rover. Development
 Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Canadian Lunar & Planetary Rover Guy who likes rovers Development Lunar Exploration Analysis Group Meeting October 21, 2015 Peter Visscher, P.Eng. Argo/Ontario Drive & Gear Ltd. Perry Edmundson, P.Eng.
Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection
 Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Journal of Asian Electric Vehicles, Volume 7, Number 2, December 2009 Study of Flexible Wheels for Lunar Exploration Rovers: Running Performance of Flexible Wheels with Various Amount of Deflection Koiro
Suitability of reusability for a Lunar re-supply system
 www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
www.dlr.de Chart 1 Suitability of reusability for a Lunar re-supply system Etienne Dumont Space Launcher Systems Analysis (SART) Institut of Space Systems, Bremen, Germany Etienne.dumont@dlr.de IAC 2016
ABHELSINKI UNIVERSITY OF TECHNOLOGY
 ABHELSINKI UNIVERSITY OF TECHNOLOGY Department of Automation and Systems Technology Zhongliang HU Study and Implementation of Wheel Walking for a Mars Rover Thesis submitted in partial fulfillment of the
ABHELSINKI UNIVERSITY OF TECHNOLOGY Department of Automation and Systems Technology Zhongliang HU Study and Implementation of Wheel Walking for a Mars Rover Thesis submitted in partial fulfillment of the
Design and Fabrication of Rocker Bogie Mechanism using Solar Energy
 Design and Fabrication of Rocker Bogie Mechanism using Solar Energy Rajat Murambikar 1, Vinay Omase 2, Vivek Nayak 3, Karan Patil 4, Prof. Yogesh Mahulkar 5 1,2,3,4Bachelor of Engineering, Department of
Design and Fabrication of Rocker Bogie Mechanism using Solar Energy Rajat Murambikar 1, Vinay Omase 2, Vivek Nayak 3, Karan Patil 4, Prof. Yogesh Mahulkar 5 1,2,3,4Bachelor of Engineering, Department of
ENERGIA 1. IDENTIFICATION. 1.1 Name. 1.2 Classification Family : K Series : K-1/SL-17 Version : 4 strap-ons
 1. IDENTIFICATION 1.1 Name 1.2 Classification Family : K Series : K-1/SL-17 Version : 4 strap-ons Category : SPACE LAUNCH VEHICLE Class : Heavy Lift Vehicles (HLV) Type : Expendable Launch Vehicle (ELV)
1. IDENTIFICATION 1.1 Name 1.2 Classification Family : K Series : K-1/SL-17 Version : 4 strap-ons Category : SPACE LAUNCH VEHICLE Class : Heavy Lift Vehicles (HLV) Type : Expendable Launch Vehicle (ELV)
Uninhabited Air Vehicle (UAV) Costing Considerations PSI Team. SCAF Workshop 22 November 2010
 Costing Considerations PSI Team. SCAF Workshop 22 November 2010") Uninhabited Air Vehicle (UAV) Costing Considerations PSI Team SCAF Workshop 22 November 2010 UAV Design Considerations 1. Role 2. Design quality military / commercial? 3. Performance altitude, speed, endurance
Uninhabited Air Vehicle (UAV) Costing Considerations PSI Team SCAF Workshop 22 November 2010 UAV Design Considerations 1. Role 2. Design quality military / commercial? 3. Performance altitude, speed, endurance
FAULHABER Market solutions. Drive Systems for Aerospace & Aviation
 FAULHABER Market solutions Drive Systems for Aerospace & Aviation Light as air Equipment manufacturers for the Aerospace & Aviation markets rely heavily on innovative new materials, processes, and parts
FAULHABER Market solutions Drive Systems for Aerospace & Aviation Light as air Equipment manufacturers for the Aerospace & Aviation markets rely heavily on innovative new materials, processes, and parts
Questions to Address today
 HEMS Weather Symposium, March 2006 Questions to Address today What is Max-Viz and who is Bob Yerex? What is EVS, and how does it operate? How can EVS help with EMS safety? What is Max-Viz? Founded in 2001,
HEMS Weather Symposium, March 2006 Questions to Address today What is Max-Viz and who is Bob Yerex? What is EVS, and how does it operate? How can EVS help with EMS safety? What is Max-Viz? Founded in 2001,
AN OPTIMIZED PROPULSION SYSTEM FOR Soyuz/ST
 1 RD-0124 AN OPTIMIZED PROPULSION SYSTEM FOR Soyuz/ST Versailles, May 14,2002 Starsem Organization 2 35% 25% 15% 25% 50-50 European-Russian joint venture providing Soyuz launch services for the commercial
1 RD-0124 AN OPTIMIZED PROPULSION SYSTEM FOR Soyuz/ST Versailles, May 14,2002 Starsem Organization 2 35% 25% 15% 25% 50-50 European-Russian joint venture providing Soyuz launch services for the commercial
FlexCore Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft
 FlexCore Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Dan Hegel Director, Advanced Development Blue Canyon Technologies hegel@bluecanyontech.com BCT Overview BCT
FlexCore Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Dan Hegel Director, Advanced Development Blue Canyon Technologies hegel@bluecanyontech.com BCT Overview BCT
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR
 A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
A New Facility for Lander Touchdown and Rover Mobility Testing at DLR Lutz Richter, Antje Brucks, Lars Witte DLR Institute of Space Systems, Bremen, Germany New DLR Institute of Space Systems Systems Analysis
Test Facility for Sampler Drills and Distribution Tools
 Aerospace Engineering Department Test Facility for Sampler Drills and Distribution Tools C. Dainese, F. Malnati, A. Ercoli Finzi, G. Sangiovanni The past Small Sample Acquisition and Distribution Tool
Aerospace Engineering Department Test Facility for Sampler Drills and Distribution Tools C. Dainese, F. Malnati, A. Ercoli Finzi, G. Sangiovanni The past Small Sample Acquisition and Distribution Tool
and excellence Effectiviness XA-series Armoured Wheeled Vehicle Family
 XA-series Armoured Wheeled Vehicle Family Patria Vehicles Oy P.O. Box 186 FIN-13101 Hämeenlinna Finland Tel. +358 3 6451 Fax +358 3 619 6710 vehicles@patria.fi www.patria.fi From 1st January 2003: Tel.
XA-series Armoured Wheeled Vehicle Family Patria Vehicles Oy P.O. Box 186 FIN-13101 Hämeenlinna Finland Tel. +358 3 6451 Fax +358 3 619 6710 vehicles@patria.fi www.patria.fi From 1st January 2003: Tel.
Lunar Driving Simulator History
 1 of 20 Lunar Driving Simulator History Early NASA MSFC/Northrop MOLAB Concept. This vehicle concept evolved from the study contract NAS8-11096 in support of the early Apollo Logistic Support System studies
1 of 20 Lunar Driving Simulator History Early NASA MSFC/Northrop MOLAB Concept. This vehicle concept evolved from the study contract NAS8-11096 in support of the early Apollo Logistic Support System studies
Production of Scientific and Production Center Unmanned Aircraft Systems and Technologies
 State Scientific Institution PHYSICAL-TECHNICAL INSTITUTE OF NATIONAL ACADEMY OF SCIENCES OF BELARUS Production of Scientific and Production Center Unmanned Aircraft Systems and Technologies Physical-Technical
State Scientific Institution PHYSICAL-TECHNICAL INSTITUTE OF NATIONAL ACADEMY OF SCIENCES OF BELARUS Production of Scientific and Production Center Unmanned Aircraft Systems and Technologies Physical-Technical
Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon
 , Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
, Germany Deployment and Drop Test for Inflatable Aeroshell for Atmospheric Entry Capsule with using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori
ASTRIUM. Lunar Lander Concept for LIFE. Hansjürgen Günther TOB 11. Bremen, 23/
 Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
Lunar Lander Concept for LIFE Hansjürgen Günther TOB 11 Bremen, 23/24.11.2006 This document is the property of EADS SPACE. It shall not be communicated to third parties without prior written agreement.its
In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led
 was founded by current company President Alexander Zakharov, since then he has led") A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
A-Level Aerosystems In 2003, A-Level Aerosystems (ZALA AERO) was founded by current company President Alexander Zakharov, since then he has led the company to be a leader in the micro UAV market in Russian
Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems
 www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
www.dlr.de\rm Chart 1 > ASTRA 2013 - Pan/Tilt-Unit as a Perception Module 16.05.2013 Pan/Tilt-Unit as a Perception Module for Extra- Terrestrial Vehicle and Landing Systems DLR-RMC Robotic and Mechatronic
MASCOT Asteroid Lander with innovative Mobility Mechanism
 www.dlr.de Slide 1 MASCOT Asteroid Lander with innovative Mobility Mechanism Dr. Josef Reill German Aerospace Center - DLR Institute of Robotics and Mechatronics Team-Members: Josef Reill Hans-Jürgen Sedlmayr
www.dlr.de Slide 1 MASCOT Asteroid Lander with innovative Mobility Mechanism Dr. Josef Reill German Aerospace Center - DLR Institute of Robotics and Mechatronics Team-Members: Josef Reill Hans-Jürgen Sedlmayr
MASCOT Marco Polo Surface Scout. Progress Report on Lander Package Study for Marco Polo
 MASCOT Marco Polo Surface Scout Progress Report on Lander Package Study for Marco Polo Lutz Richter 1, Lars Witte 1, Tra-Mi Ho 1, Stephan Ulamec 2, Jean-Pierre Bibring 3 1 DLR Bremen, 2 DLR Cologne, 3
MASCOT Marco Polo Surface Scout Progress Report on Lander Package Study for Marco Polo Lutz Richter 1, Lars Witte 1, Tra-Mi Ho 1, Stephan Ulamec 2, Jean-Pierre Bibring 3 1 DLR Bremen, 2 DLR Cologne, 3
A MOBILITY CONCEPT FOR MARTIAN EXPLORATION Nicholas C. Costes 1, F. ASCE and Stein Sture 2
 (INCOMPLETE--Scanned Text, missing figures) A MOBILITY CONCEPT FOR MARTIAN EXPLORATION Nicholas C. Costes 1, F. ASCE and Stein Sture 2 ABSTRACT Soil mechanics and geological investigations on Mars or the
(INCOMPLETE--Scanned Text, missing figures) A MOBILITY CONCEPT FOR MARTIAN EXPLORATION Nicholas C. Costes 1, F. ASCE and Stein Sture 2 ABSTRACT Soil mechanics and geological investigations on Mars or the
Cal Poly CubeSat Workshop 2014
 Cal Poly CubeSat Workshop 2014 866.204.1707 www.spaceflightservices.com info@spaceflightservices.com hhh @spaceflightinc 1 Spaceflight Business Model Our Model Arrange launch opportunities for secondary
Cal Poly CubeSat Workshop 2014 866.204.1707 www.spaceflightservices.com info@spaceflightservices.com hhh @spaceflightinc 1 Spaceflight Business Model Our Model Arrange launch opportunities for secondary
Cygnus Payload Accommodations: Supporting ISS Utilization
 The Space Congress Proceedings 2018 (45th) The Next Great Steps Feb 27th, 1:30 PM Cygnus Payload Accommodations: Supporting ISS Utilization Frank DeMauro Vice President and General Manager, Advanced Programs
The Space Congress Proceedings 2018 (45th) The Next Great Steps Feb 27th, 1:30 PM Cygnus Payload Accommodations: Supporting ISS Utilization Frank DeMauro Vice President and General Manager, Advanced Programs
Road fatalities in 2012
 Lithuania 1 Inhabitants Vehicles/1 000 inhabitants Road fatalities in 2012 Fatalities /100 000 inhabitants in 2012 2.98 million 751 301 10.1 1. Road safety data collection Definitions Road fatality: person
Lithuania 1 Inhabitants Vehicles/1 000 inhabitants Road fatalities in 2012 Fatalities /100 000 inhabitants in 2012 2.98 million 751 301 10.1 1. Road safety data collection Definitions Road fatality: person
Notes: GENERAL DYNAMICS EARLY LUNAR ACCESS [1993]
![Notes: GENERAL DYNAMICS EARLY LUNAR ACCESS [1993]](/thumbs/88/115730710.jpg "Notes: GENERAL DYNAMICS EARLY LUNAR ACCESS [1993]") Notes: file:///f /SPACE Misc/Lunar Explore/Lunar Do...NERAL DYNAMICS EARLY LUNAR ACCESS [1993].htm (1 of 8) [17/03/2005 9:35:03 p.m.] 1.INTRODUCTION EARLY LUNAR ACCESS (ELA) was a "cheaperfasterbetter"
Notes: file:///f /SPACE Misc/Lunar Explore/Lunar Do...NERAL DYNAMICS EARLY LUNAR ACCESS [1993].htm (1 of 8) [17/03/2005 9:35:03 p.m.] 1.INTRODUCTION EARLY LUNAR ACCESS (ELA) was a "cheaperfasterbetter"
UT30MK2 & MT30 Unmanned and Manned Turrets
 ELBIT SYSTEMS - LAND AND C 4 I ARMORED VEHICLES SOLUTIONS UT30MK2 & MT30 Unmanned and Manned Turrets Combat-proven firepower for armored personnel carriers, fully overhead without compromising troop safety
ELBIT SYSTEMS - LAND AND C 4 I ARMORED VEHICLES SOLUTIONS UT30MK2 & MT30 Unmanned and Manned Turrets Combat-proven firepower for armored personnel carriers, fully overhead without compromising troop safety
MIT: MoRETA Citation: Miller, D (2009). MoRETA: CDIO Knowledge Library, Cambridge, Mass: CDIO Global Initiative,
. MoRETA: CDIO Knowledge Library, Cambridge, Mass: CDIO Global Initiative,") CDIO KNOWLEDGE LIBRARY MIT: MoRETA Citation: Miller, D (2009). MoRETA: CDIO Knowledge Library, Cambridge, Mass: CDIO Global Initiative, www.cdio.org 1. Project Overview (1 page) 1 1.1. Overall goal or
CDIO KNOWLEDGE LIBRARY MIT: MoRETA Citation: Miller, D (2009). MoRETA: CDIO Knowledge Library, Cambridge, Mass: CDIO Global Initiative, www.cdio.org 1. Project Overview (1 page) 1 1.1. Overall goal or
John Klaus Robert Cooper Thilina Fernando Zoe Morozko
 Faculty Advisors: Dr. Dan Kirk Greg Peebles Justin Treptow Alex Morrese Alexis Mendez Casselle Russell John Klaus Robert Cooper Thilina Fernando Zoe Morozko Paul Martin Ben Burnett Damian Harasiuk 1 Launch
Faculty Advisors: Dr. Dan Kirk Greg Peebles Justin Treptow Alex Morrese Alexis Mendez Casselle Russell John Klaus Robert Cooper Thilina Fernando Zoe Morozko Paul Martin Ben Burnett Damian Harasiuk 1 Launch
Propulsion Controls and Diagnostics Research at NASA GRC Status Report
 Propulsion Controls and Diagnostics Research at NASA GRC Status Report Dr. Sanjay Garg Branch Chief Ph: (216) 433-2685 FAX: (216) 433-8990 email: sanjay.garg@nasa.gov http://www.lerc.nasa.gov/www/cdtb
Propulsion Controls and Diagnostics Research at NASA GRC Status Report Dr. Sanjay Garg Branch Chief Ph: (216) 433-2685 FAX: (216) 433-8990 email: sanjay.garg@nasa.gov http://www.lerc.nasa.gov/www/cdtb
Cliffbot CRV tests. Mars2013 simulation. Main results
 Cliffbot CRV tests Mars2013 simulation Main results Summary 1 Objectives 2 Tests general information 3 Results 4 Conclusions The CRV and an operator in the Aouda spacesuit 1 Objectives The Cliff Reconnaissance
Cliffbot CRV tests Mars2013 simulation Main results Summary 1 Objectives 2 Tests general information 3 Results 4 Conclusions The CRV and an operator in the Aouda spacesuit 1 Objectives The Cliff Reconnaissance
ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration
 ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration 1 October 2014 Toronto, Canada Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
ReachMars 2024 A Candidate Large-Scale Technology Demonstration Mission as a Precursor to Human Mars Exploration 1 October 2014 Toronto, Canada Mark Schaffer Senior Aerospace Engineer, Advanced Concepts
VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS
 REPORT 15.12.2010 VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS Hans Baumgartner 6153583 CONTENTS ABBREVIATIONS... 3 1. INTRODUCTION... 4 2. PLANETARY ROVERS... 5 2.1 History... 5 2.2 Sensors
REPORT 15.12.2010 VISION-BASED NAVIGATION TECHNIQUES IN PLANETARY ROVERS Hans Baumgartner 6153583 CONTENTS ABBREVIATIONS... 3 1. INTRODUCTION... 4 2. PLANETARY ROVERS... 5 2.1 History... 5 2.2 Sensors
Design of Mobility System for Ground Model of Planetary Exploration Rover
 Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
Technical Paper J. Astron. Space Sci. 29(4), 413-422 (2012) Design of Mobility System for Ground Model of Planetary Exploration Rover Younkyu Kim 1, Wesub Eom 1, Joo-Hee Lee 1, 2, and Eun-Sup Sim 1 1 Aerospace
A combined Exobiology and Geophysics Mission to Mars
 A combined Exobiology and Geophysics Mission to Mars 2009 Colin Pillinger (OU) Mark Sims (Leicester) T. Spohn, L. Richter (DLR Germany) S. Hurst, R. Slade, S. Kemble (EADS Astrium) D. Northey, P. Taylor,
A combined Exobiology and Geophysics Mission to Mars 2009 Colin Pillinger (OU) Mark Sims (Leicester) T. Spohn, L. Richter (DLR Germany) S. Hurst, R. Slade, S. Kemble (EADS Astrium) D. Northey, P. Taylor,
The Mars Express Mission A Continuing Challenge. Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner
 The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in
The Mars Express Mission A Continuing Challenge Erhard Rabenau, NOVA Space Associates Ltd Mars Express Senior Mission Planner Mars Society, Munich, 13 October, 2012 The Mars Express Mission - a First in