Some science of balance Tony Foale 2007.
|
|
|
- Jacob McKinney
- 6 years ago
- Views:
Transcription


1 Some science of balance Tony Foale Readers who started riding before the 1970s, will easily remember the incredible vibration that we used to have to suffer, particularly with British single and twin cylinder machines. In addition to that, we also had to endure quite severe vibration from road shocks generally because of poor suspension. However, with the advent of the Japanese multi-cylinder machines, Lanchester balance shafts and the drive towards better suspension, today we can enjoy a much greater freedom from annoying vibration. In this article, we will only consider the vibration caused by the engine. This vibration has two basic sources, the least severe of which stems from the irregular torque output of reciprocating internal combustion engines. However, the biggest problem is due to the inability to balance inertia forces due to the piston motion in certain types of engine configuration. There can be two sources of mechanical imbalance, they are; rotating and reciprocating. Rotating balance Any rotating object can produce nett rotating forces if not properly balanced. Typical items of concern to us, would be the clutch assembly, alternators, flywheels and crankshaft. These out of balance forces are due to asymmetrical mass distribution about the rotating axis of the object in question. The clutch, alternators and any external flywheels can be fully balanced. However, due to the needs of reciprocating balance, certain configurations of engine, rarely allow us to achieve perfect rotating balance of the crankshaft, single cylinder engines, for example. There are two aspects of rotating balance which need to be considered. These are usually termed static and dynamic. It is possible for an object to be statically balanced, whilst being unbalanced dynamically. The reverse is not true however, any object, which is in dynamic balance is also in static balance. All particles within a spinning object produce what is commonly called centrifugal force*, this force acts radially outward from each particle. If the resultant of all these forces equates to zero, then the object is balanced. Static balance. The test for static balance is quite simple. If the object is mounted in low friction bearings with the axis of rotation horizontal. Then the object will remain stationary, regardless of its initial starting position. If any static imbalance exists within the object, it will always tend to come to rest in a position with the heaviest section at the bottom. This technique is illustrated in the photo showing motorcycle wheels undergoing a static balance test. The criteria for static balance is illustrated in figures 1a,b & c. 1a. 1b.
2 1c. Fig. 1 a. This figure shows an object with two identical masses, the condition for static balance is simply that each mass is the same distance away from the axis of rotation. b. In this case one of two masses has a mass twice that of the other. To achieve balance each mass must produce an equal and opposite moment about the axis, this demands that the lighter mass be mounted at twice the radius from the axis. c. The general condition for balance with numerous masses is that the vector sum of all the moments equates to zero. Dynamic balance. Figure 2a illustrates the concept of dynamic imbalance. The object shown is clearly in static balance, because the moments of the two masses balance each other about the spin axis as in figure 1a. The offset of the two masses along the spin axis gives rise to what is often known as a rocking couple. As such an object rotates, the orientation of this couple also rotates, attempting to move the axis in a conical manner. To achieve dynamic balance, we must rearrange the masses such that the rocking couple disappears. In practice, this is done by either removing material from the object, or sometimes by adding material. Figure 2b shows how the addition of two extra masses can achieve dynamic balance, which also guarantees that the object is statically balanced. The idea of the possible generation of a rocking couple is very important to the subject of engine balance. 2a. 2b. Fig. 2 a. Each of these two masses create centrifugal forces, and because of their separation along the axis or rotation these forces produce a rocking couple. b. The addition of two opposite but otherwise identical masses is one way to remove the couple and restore dynamic balance.

3 A typical scene at race meeting. A tyre technician is balancing a wheel statically. The relative narrowness of such wheels does not often allow for significant dynamic imbalance. Although the rear tyres of large racing machines are now of a width where it is becoming more likely that dynamic imbalance might cause problems. Reciprocating balance The piston in an engine moves along a straight line, defined by the axis of the cylinder. However, its velocity is continually changing throughout a cycle, it is stationary when at both TDC and BDC, achieving maximum velocity somewhere around the mid-stroke. Oscillating forces must be applied to the piston to cause these alternating accelerations. If these inertia forces are not balanced internally within an engine. They must pass through the conrod to the crankshaft then on to the main bearings and onto the crankcase, from the crankcase they are passed into the frame through the engine mountings. The rider feels these forces as annoying or incapacitating vibration, depending on their severity. The motion of the piston is approximately sinusoidal, and therefore so too are the acceleration forces. If the connecting rod was infinitely long, that motion would actually be truly sinusoidal, but most conrods are approximately twice the crankshaft stroke in length. This relative shortness of the rod means that, except for the TDC and BDC positions, the rod will not remain in line with the cylinder axis through a working cycle. The angularity of such a short conrod throughout a complete crankshaft revolution modifies the piston motion, see figure 3. With a very long conrod we would expect that the maximum velocity (and hence zero acceleration) of the piston would occur at 90 of rotation from TDC. With a 2:1 conrod length to stroke ratio, maximum velocity occurs just past 77. In fact an infinite number of higher order harmonics are introduced into the piston acceleration. These harmonics complicate the balancing of an engine. Fortunately, as the harmonics increase in order, their magnitude decreases, and so they become less important. In practice, it is usual only to consider the first and second harmonics when doing balance calculations. The reciprocating forces with a frequency equal to the engine RPM are known as primary forces and the reciprocating forces from the second harmonic, which cycle at twice engine speed, are known as secondary forces. It is interesting and somewhat alarming if we calculate the magnitude of the reciprocating forces produced in typical engines. This force is proportional to the square of the rpm. Assume an engine with a 64 mm stroke revving at 10,000 rpm. Then for every hundred grams of reciprocating mass a force with a peak magnitude of close to 360 kgf. will be generated at TDC. Therefore with a reciprocating mass of 350 gms. the force will be nearly 1300 kgf. It is hardly surprising that vibration can be a big problem when we have this size of alternating force bouncing around in a 200 kg. machine.

4 Fig. 3 This clearly shows how the relative shortness of an average connecting rod causes the angularity which modifies the form of the piston motion and inertia forces. Instead of attaining maximum velocity at 90, that occurs at 77. The RHS sketch is a representation of an infinitely long rod. Fig. 4. Primary and secondary forces are shown separately and combined. Positive values represent the reciprocating forces pulling on the conrod. At TDC both primary and secondary forces act in the same direction resulting in a 25% increase in the total force, compared to the primary forces alone. At BDC the separate forces oppose and the peak force is reduced by 25% For a conrod length to stroke ratio of 2:1, the peak magnitude of the secondary force is one quarter that of the magnitude of the primary force. Figure 4 illustrates how the primary and secondary reciprocating forces sum together. Although the primary and secondary forces combine to produce a single overall effect, it is both convenient and normal, for analysis purposes, to consider them

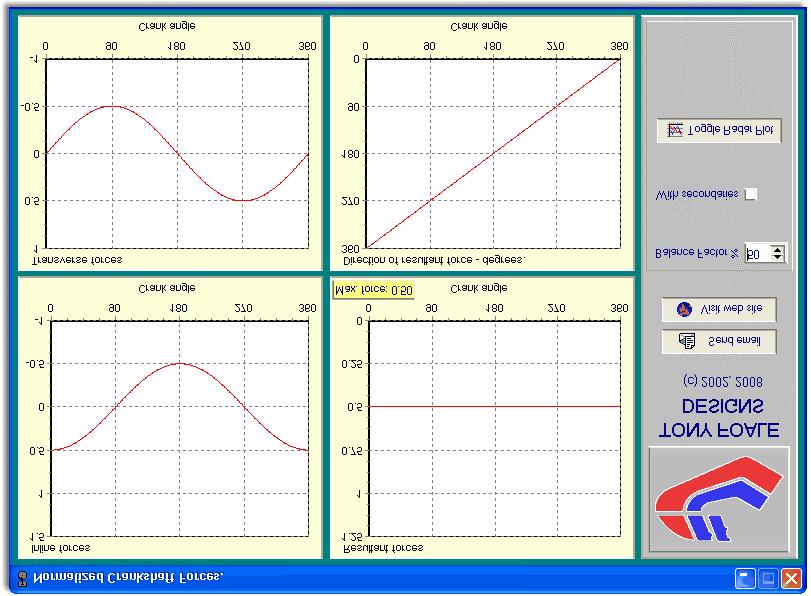
5 separately. The piston is accelerated only in a straight line along the axis of the cylinder, and so the reciprocating forces only act along the axis of the cylinder. However, the conrod is a bit more complicated to consider. The big end clearly rotates with the crankshaft and hence can be perfectly balanced by a counterweight to the crankshaft on the opposite side. The mass of the small end of the conrod reciprocates in exactly the same manner as the piston and so can be directly added to the total reciprocating mass of the piston and gudgeon pin, but that section of the conrod which connects the big and small ends will experience a combination of rotational and linear motion. To enable a simplified balance analysis to be made, it has been usual to make the approximation as shown in figure 5. That is; to assign part of the conrod mass as purely rotating and the remaining amount as purely reciprocating. Let s now look at some different engine configurations and see how these factors impact on each type. Fig. 5 Although modern computer aided design tools allow us to, relatively easily, analyze the forces from the complex motion of the conrod, it is still common practice to make an approximation by lumping its mass distribution into two parts. One fully rotating and the other fully reciprocating. If the conrod and piston assembly are supported at the axes of the big and small ends, then the weight as measured at those supports is used to represent the relative contributions to each part. Single cylinder analysis Primary forces. In order achieve a good understanding of the principles involved in engine balance is first necessary to understand the concept of balance factor, as it applies to the primary forces of a single cylinder engine. Figure 6 LHS shows how the piston applies an upward force on the conrod, at top dead centre, and also how when close to mid-stroke (RHS sketch), the piston moving at maximum velocity produces no in-line primary force. As shown in the LHS the addition of a counterweight can be used to cancel the force from the piston. Unfortunately, this simple idea is not the answer, as we can see when the piston is at mid-stroke. The counterweight will still produce a centrifugal force, but which is no longer balanced by that from the piston. So all we have done is replaced an in-line reciprocating force with a lateral alternating force of the same peak magnitude. When the counterweight exactly balances the primary reciprocating forces at TDC or BDC like this, we say that we have 100% balance factor. If no attempt is made to balance the piston force, that is; the crankshaft is in static balance after allowing for the mass of the rotating part of the conrod. We say that we have a zero balance factor. Factors between zero and 100% give rise to a combination of rotating force and reciprocating force. Fig. 7. shows plots of the primary inertial forces throughout a complete crankshaft revolution, for balance factors of 0, 50 and 100%. Inline and lateral forces are shown, as well as the magnitude of the resultant of these two forces and the direction in which it acts at any particular crankshaft angle. The lower set of plots drawn on polar axes gives a different perspective of the resultant and its direction. The upper row shows the magnitude against the range of crank shaft positions, and the lower row shows the same magnitude plotted against the angular position relative to the orientation of the cylinder.
6 Fig.6 The LHS and RHS sketches show how fully balancing the reciprocating mass at TDC only creates an equal primary alternating force acting at 90. The central sketch shows the actual situation with a real conrod. With the crank at approximately 77 there is no piston force and the full counter weight force acts as shown. This force varies in magnitude and direction throughout a rotation.
7

8 Fig. 7. The upper three sets of plots show the primary inertial forces throughout a complete crankshaft revolution, for balance factors of 0, 50 and 100%. The lower set shows the resultant magnitude re-plotted on polar coordinates giving a different perspective to the same data. Let us study these graphs in more detail because they illustrate some interesting aspects of engine balance. The zero balance factor case shows that we have a sinusoidal in-line force but zero transverse force through the range of rotation. In other words the unbalanced forces vary in magnitude but always act up or down in-line with the cylinder. The bottom right plot shows the force direction to be 0 (360 ) or 180 from TDC. The lower polar plot also shows the inline nature of the forces whereas the upper one shows how the magnitude varies with crank angle. The 50% factor case is quite different. Firstly, notice that the peak value of the in-line force has reduced to half of the previous value due to the counter-weight force. Secondly, note that we have now introduced transverse forces, also of the same magnitude, but shifted in phase by 90 of crankshaft rotation. The resultant of these two forces always sums to a constant value pointing radially outward from the crank axis. The polar plots also show this nicely. This constant radial force actually rotates in the opposite direction to that of the crankshaft rotation, as shown in figure 8. This balance factor also gives the least magnitude of the resultant of all balance factors, being 0.5 times the unbalanced peak reciprocating force. Looking at the 100% balance factor curves, we see that the direction of the forces has simply switched from in-line to transverse with the same magnitude. At TDC and BDC the reciprocating forces are perfectly balanced by the counter-weight, which then leaves transverse forces only. The polar plots easily show that this case is just the same as the zero factor situation except that everything has shifted through 90. Balance factors other than these three values will give rise to resultants of between 50% and 100% of the unbalanced reciprocating force, and with force directions being a combination of linear and rotational, depending on the actual BF. We now understand the effects of different balance factors but that doesn t answer the question of
9 which is the best value to use in practice. There is no easy answer to that, because the overall vibration characteristics vary so much with the vibration modes of the whole motorcycle, not just the engine. At first sight, aiming for the minimum peak force, as with 50% BF, would be desirable and the old Matchless and AJS 500 cc. parallel twins used that value. Generally, balance factors need to be determined by experimentation, test riding a machine under various conditions. Sometimes annoying vibration will be noticed only at a particular RPM range. Changing the balance factor can move that range up or down the RPM scale, giving the possibility to move it away from the most used RPM. In practice, balance factors are usually between 50% and 85%. A couple of years back I had first hand experience of using the wrong factor. I was asked to race a classic 350 cc. Aermacchi single cylinder machine in the USA. These have the cylinder orientated close to horizontal. The owner of the bike took the crank-shaft to an expert in balancing, and against my advice it was rebalanced to around 70% or 80%. The motorcycle vibrated so badly that it was necessary to ease off on the throttle, just to hold on to the handlebars. It also cracked the frame in places. The expert hadn t allowed for the fact that a horizontal cylinder produces its forces at 90 to those of an upright engine. When it was rebalanced to around 20% or 30% the machine became much smoother. Fig. 8 The special case of 50% balance factor. At TDC and BDC the counterweight balances half of the reciprocating force. At TDC the resultant acts upwards. At 90 of crankshaft rotation there is no primary reciprocating force and so the centrifugal force of the counterweight is left unbalanced, acting transversely. Note that although the crank has rotated anti-clockwise the resultant force has moved from upwards towards the right. In other words the direction of the resultant force is clockwise, exactly opposite to the crank rotation. This holds true through a complete revolution. Balance shafts Many modern engines are fitted with balance shafts. The principle behind these was originally proposed by Dr. Lanchester around a hundred years ago. In order to understand how a balance shaft works. Firstly, we need to consider that special case of a 50% balance factor again. We saw that this value gives the minimum resultant unbalanced force, which is of constant magnitude throughout the revolution of the crankshaft, although rotating in the opposite direction. A constant rotating force can easily be balanced by another constant rotating force spaced 180 apart. However, it is not as easy as adding another counterweight to the crankshaft, because this force rotates in the opposite direction, as we have seen, and therefore can only be balanced by a
10 counterweight rotating in the opposite direction. This is the reason that balance shafts rotate in the opposite direction to the crankshaft. Normally, only one balance shaft is used, but we can see from figure 9. (left) that although the forces are balanced, we have created a moment between the crankshaft and the balance shaft, due to the distance between the lines of action of the separate forces. Figure 9. (right) shows how the use of two smaller balance shafts can eliminate this couple. Cost, packaging and weight are the reasons that it is more common to see only one balance shaft. An alternative to a conventional balance shaft is to mount the balancing mass on a rotor concentric with the crankshaft, as has been done by Husaberg. In this design, a balance disc is mounted right next to the crankshaft and driven in the reverse direction via a chain of gears. This still leaves a small rocking couple, due to the spacing between this disc and the centre line of the conrod. This rocking couple is considerably less than would be obtained with a single conventional balance shaft. Fig. 9. On the left is a typical balance shaft layout. The crankshaft has 50% balance factor, and the balance shaft creates a further 50% to balance the reciprocating force when at TDC. At 90 rotation there is no reciprocating force but because the balance shaft rotates in the opposite direction the two centrifugal forces cancel out, leaving zero unbalance force through a full revolution. However, the spacing between the two shafts creates a rocking couple. As seen on the right, the use of two balance shafts, which each balance 25%, can eliminate that couple. So we have seen how we can do a fairly good job of smoothing out the large reciprocating primary forces from a single cylinder engine. Prior to the common usage of the Lanchester balance shaft, it was usual to adjust the vibration characteristics of a particular motorcycle, by means of the balance factor. We have seen that different balance factors, allow us to alter the direction of the peak force. The optimum balance factor in each case would be determined by the vibration characteristics of the chassis. For example, if it was easier to excite vertical rather than horizontal vibrations in a particular chassis. Then we would select high balance factor, in order to reduce the vertical forces and emphasise those acting horizontally (this assumes an engine with a vertically orientated cylinder).


11 Husaberg engine. Instead of the usual balance shaft, this design uses a balance disc (marked by the red dot) concentric with the crankshaft. This reduces the value of the usual unbalanced rocking couple. This typical balance shaft is fitted to a Kawasaki parallel twin cylinder engine with 180 crankshaft. Such a crankshaft already has perfect primary balance but creates a rocking couple due to the separation of the two cylinders. In this case the balance shaft is there to smooth out that couple. Secondary forces. In a single cylinder engine, the secondary forces provide us with a harder problem to solve. The concept of balance factor is applied to the crankshaft is not relevant in this case, because by definition, the secondary forces vibrate at twice the rate of the crankshaft rotation. We could add a balance shaft that rotates at twice the engine speed but that would only replace the in-line forces with lateral ones, as in the case of 100% balance factor with primary forces. However, if we used two counter-rotating balance shafts, geared so they ran at twice the speed of the crankshaft, then we could in fact, eliminate the secondary forces. As we shall see, four cylinder engines suffer badly from secondary forces, and twin secondary balance shafts were developed by Mitsubishi for their Astron engine, and followed by several other manufacturers, including Porsche. Refer to figure 10. to see how the secondary forces change the situation when compared to the primary only situation of figure 7. Now that we have covered the basics let us look at the balance characteristics of various common types of engine.
12

13 Fig. 10. These plots are similar to those in fig. 7. except that they include the addition of the secondary forces and so represent the realistic case. Compare these with those in fig.7 to get an idea of the influence of the secondary effects.
14 Twin cylinder engines There is a multitude of configurations of twin cylinder engines that have been used on motorcycles. An interesting aspect of these different types is that they can mostly be considered as a particular type of V-twin. For example, a boxer engine such as used by BMW is a V-twin with a 180 degree included angle. The in-line or parallel twin is simply a V-twin with a 0 degree angle. V-twin It is engines such as Ducati and Harley Davison that we normally refer to as V-twins. A V-twin with a 90 degree included angle, such as Ducati, the SV Suzuki and others, can achieve perfect primary balance without the use of a balance shaft. Fig. 11. The use of a balance factor of 100% of one set of reciprocating masses will balance out the primary reciprocating forces of either piston at TDC. In fact this balance is maintain through a full revolution providing perfect primary balance. A small rocking couple is introduced due to the offset of the side-by-side conrods. This is minimal. Secondary forces from the two cylinders sum and always act in the direction shown. Consider the first V-twin illustration, figure 11. Imagine that we have added a counter-weight so as to achieve 100% balance factor of one cylinder. This will completely balance the primary reciprocating force from the piston at TDC. Now consider the second illustration. The crankshaft has rotated 90 degrees from the first. With a single cylinder engine we saw that the counter-weight would introduce a lateral force in this position. It still does with the 90 deg. V-twin but this time it is balanced by the force of the second piston, which is now at its own TDC. This balance is achieved throughout the rotation of the crank-shaft. Because the connecting rods sit side-by-side on the crankpin, the reciprocating forces cause a small primary rocking couple. However, this is normally of minor importance. Although the secondary forces of each individual cylinder of a 90 V-twin act in line with each cylinder. They always sum together such that they act in a direction at right angles to the line bisecting the two cylinders. The peak magnitude of the combined secondary forces is 1.4 times the peak magnitude from either cylinder. Of course, we all know that not all V-twin engines have the cylinders separated by 90. Harley- Davison is probably the most well-known of these with the angle less than this figure. Engines like the Harley sharing a common crankpin cannot have all of the primary forces, totally balanced with out the aid of a balance shaft. There are, however, some narrow angle V2 engines which use staggered crankpins. For any particular angle between the V, it is easy to calculate the angle of offset between the crankpins and a balance factor, which is necessary to provide complete primary balance. The optimum angular offset is simply: ( 2 x Av ) where Av is the angle between the V. The optimum balance factor is equal to: ( sin(av) ). For example to achieve perfect primary balance a V-twin with an included angle of 70 would need a crankpins to be offset by 40 and balanced to 94%. These values are plotted in figure 12.


15 Fig. 12. V-twins of any included angle between 0 and 180 can have perfect primary balance with staggered crankpins and appropriate balance factors as shown here. The balance factor is expressed in percentage of the reciprocating mass from one cylinder only. Note that for parallel twins and boxer engines the crankpin offset is 180 and the optimum balance factor is 0%. 90 V-twins need zero offset, i.e. they use a common crankpin and need a balance factor of 100%. When is a twin, not a twin? When it is a single. When Ducati wanted to build a single cylinder racing bike, the Super-Mono. The obvious thing to do was to remove one cylinder from its already successful V-twin. To control vibration, the designers came up with an ingenious solution to provide the same perfect primary balance of the V. engine. They could have retained both cylinders and pistons and simply disabled one, but this would have entailed excessive frictional and pumping losses. To circumvent these problems the piston was replaced by an oscillating link, minimal friction losses and no pumping losses were introduced by this design. The inertia of the link replaced the inertia of the missing piston. The Ducati Super-mono. Note how the missing piston has been replaced with a link which oscillates about its forward pivot as it is actuated by a normal conrod. The balance characteristics are almost identical to those of the V-twin.

16 In-line twin (Parallel twin) There are two configurations that have been used in this type of engine. Those with the crankpins in line with one another, known as a 360 twin, and those with the crankpins spaced at 180. The 360 engine offers even firing intervals, but at the cost of the poor balance characteristics of a single cylinder engine. On the other hand, the 180 engine offers primary balance, but an uneven firing order. This type also gives rise to primary a rocking couple as can be seen in figure 13. Both configurations suffer identical secondary imbalance, with the secondaries from each cylinder always acting in the same direction. An in-line twin has a zero included angle, so applying the formulas given for V2 crankpin offset, we can calculate that the optimum crankpin offset should be 180 with a balance factor of zero. BMW produce an 800 cc. 360 twin. To remove primary and secondary forces and prevent any rocking couples, they have adopted a solution similar to the Ducati Super-Mono mentioned previously. However, unlike the Ducati they appear not to use an identical conrod to those in the cylinders. Published illustrations show the connecting rod to the rocker as being shorter. In order for this balance mechanism to maintain the correct ratio between primary and secondary forces, needed to balance those from the pistons, the stroke would need to be reduced also. Packaging was probably the reason for shortening the stroke and conrod length of the balance mechanism. This option was not available to the Ducati engineers because the balance conrod had to share the same crankpin as the working rod. Fig. 13. The 360 twin on the left has the same balance characteristics as a single with equal total reciprocating mass. The 180 twin has perfect primary balance, due to the downward motion of one piston opposing the upward motion of the other. Unfortunately, the secondaries add together rather than balance out. The offset between the cylinders causes a rocking couple with the 180 design.
.")
17 The BMW 800 cc. Parallel twin. The central conrod forces the pivoted link to oscillate up and down. The inertia forces so produced cancel out both primary and secondary forces and the symmetrical layout introduces no rocking couple. This is a recipe for a very smooth engine. Opposed twin (boxer). This engine type, generally associated with BMW motorcycles, has naturally excellent balance characteristics, because both pistons are always working in opposite directions, both primary and secondary forces are totally cancelled leaving only primary and secondary couples due to the offset between the two cylinders, figure 14. The latest versions of the BMW boxer engines are actually fitted with balance shafts to deal with that couple. Considered as a 180 V-twin we can see from figure 12. that the crankpin stagger should be 180 and the balance factor be zero. Fig. 14. Primary and secondary forces clearly balance out in a boxer engine, but the offset of the cylinders spoils the otherwise perfect balance by introducing primary and secondary couples.
18 Geared or double crankshaft twin. In this case two single cylinder crankshafts rotate in opposite directions. We can see from figure 15. that if each crankshaft has a balance factor of 100% then this type of engine has perfect primary balance. Unfortunately, it is subject to the usual secondary forces. There is no residual rocking couple generated with this type of engine. The very successful Rotax twin cylinder 2 stroke engine was of this type. Fig. 15. Geared twin. With 100% balance factors on each crankshaft, the primary forces are balanced at TDC and BDC. Due to the counter-rotation of the cranks, the two counterweights balance each other at other crank positions. This type of engine is only left with secondary forces. Three cylinder engines. Several manufacturers have fitted motorcycles with three cylinder engines, Triumph, Yamaha and Laverda have produced road-going in-line four strokes. Kawasaki and Suzuki, both made in-line 3 cylinder two-strokes and before the start of the new MotoGP racing class came into existence, there were several V3 2-stroke engines used in the world Championships. The most common crankshaft layout for an in-line three cylinder engine is with each crankpin spaced at 120. This symmetrical layout completely balances primary and secondary forces. However, due to the width of the crankshaft, serious primary and secondary rocking couples are introduced. In addition to making 120 triples Laverda also produced one with a 180 crankshaft. The outer two cylinders had in-line crankpins, and hence the pistons moved up and down together, but the central cylinder has its crankpin 180 away. The reasoning behind this layout is to eliminate the rocking couple. In so doing, the otherwise perfect primary and secondary balance of the 120 engine is lost. The overall primary forces are equal to those from one cylinder alone, but the secondary forces of all three pistons add together, figure 16.


19 Fig. 16. Two different3 cylinder crankshaft configurations. On the left is a 120, when one piston is at TDC then another will be 120 past TDC with the remaining one 120 before TDC. At 120 after or before TDC the reciprocating forces are 50% of those at TDC but acting the opposite direction. So all forces are balanced. Unfortunately, the opposing forces are offset along the crankshaft and create a rocking couple. The 180 design on the right has no rocking couple but only 2/3rds of the primary forces are balanced out and the secondaries from all three cylinders sum together. Four-cylinder engines In-line four-cylinder engines are a common fitment to modern motorcycles. Although different crankshaft configurations have been tried. The most common is with the two outer pistons moving together, and likewise the inner pistons moving together, but 180 out of phase from the outer pair, figure 17. This engine layout gives perfect primary balance, with no residual rocking couples. However, the secondary forces from all cylinders add together, and hence motorcycles with these engines are often subject to annoying high-frequency vibration, which would need two balance shafts rotating at twice engine RPM to eliminate. Cylinder pressure induced vibration The cylinder pressure varies with time and it follows that the torque produced also varies. This torque variation can be smoothed out by the use of high inertia rotating parts, such as a massive flywheel. However, excess rotation inertia has several other disadvantages, such as reducing acceleration and slowing corner turn-in. This torque variation is ultimately reacted into a pulsating chain force and pulsating loads on the engine mountings. In other words it is a source of vibration for machine and rider, although generally of less concern than the forces due to the imbalance discussed before. I have often seen it written that the combustion pressure on the piston adds to the overall unbalanced forces. This is not true because any downward force on the piston from this source is exactly balanced by an equal force pushing up on the cylinder head. This only produces internal stresses within the engine, not any external reactions, figure 18.


20 Fig. 17. Common design of 4 cylinder in-line engine. Although the primary forces balance out due to the opposed motion of the pistons, the secondary forces all add together. No rocking couples are produced. Fig. 18. Cylinder pressure is balanced internally within the engine and transmits no external vibration forces, except those due to irregular torque.
21 * Note on centrifugal force. Physics purists argue that this does not exist, there is no force acting outwards due to rotation, rather there is a centripetal force acting inward to force a curved path on the particles of rotating objects. I agree, this is true. However, for most people the idea of centrifugal force is an understandable, real and useful concept and to avoid this term in the interests of purity would only serve to distract the average reader away from the central theme of this article. Footnote: The software used to generate the graphs in this article is freeware and is available for free download and use from the author s web site just click on the Freeware button.
DIY balancing. Tony Foale 2008
 DIY balancing. Tony Foale 2008 I hope that the main articles on the theory behind engine balance have removed the mystic which often surrounds this subject. In fact there is no reason why anyone, with
DIY balancing. Tony Foale 2008 I hope that the main articles on the theory behind engine balance have removed the mystic which often surrounds this subject. In fact there is no reason why anyone, with
Dynamics of Machines. Prof. Amitabha Ghosh. Department of Mechanical Engineering. Indian Institute of Technology, Kanpur. Module No.
 Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 05 Lecture No. # 01 V & Radial Engine Balancing In the last session, you
Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 05 Lecture No. # 01 V & Radial Engine Balancing In the last session, you
Dynamics of Machines. Prof. Amitabha Ghosh. Department of Mechanical Engineering. Indian Institute of Technology, Kanpur. Module No.
 Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 04 Lecture No. # 03 In-Line Engine Balancing In the last session, you
Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 04 Lecture No. # 03 In-Line Engine Balancing In the last session, you
2 Technical Background
 2 Technical Background Vibration In order to understand some of the most difficult R- 2800 development issues, we must first briefly digress for a quick vibration tutorial. The literature concerning engine
2 Technical Background Vibration In order to understand some of the most difficult R- 2800 development issues, we must first briefly digress for a quick vibration tutorial. The literature concerning engine
Simple Gears and Transmission
 Simple Gears and Transmission Simple Gears and Transmission page: of 4 How can transmissions be designed so that they provide the force, speed and direction required and how efficient will the design be?
Simple Gears and Transmission Simple Gears and Transmission page: of 4 How can transmissions be designed so that they provide the force, speed and direction required and how efficient will the design be?
WEEK 4 Dynamics of Machinery
 WEEK 4 Dynamics of Machinery References Theory of Machines and Mechanisms, J.J.Uicker, G.R.Pennock ve J.E. Shigley, 2003 Prof.Dr.Hasan ÖZTÜRK 1 DYNAMICS OF RECIPROCATING ENGINES Prof.Dr.Hasan ÖZTÜRK The
WEEK 4 Dynamics of Machinery References Theory of Machines and Mechanisms, J.J.Uicker, G.R.Pennock ve J.E. Shigley, 2003 Prof.Dr.Hasan ÖZTÜRK 1 DYNAMICS OF RECIPROCATING ENGINES Prof.Dr.Hasan ÖZTÜRK The
Chapter 15. Inertia Forces in Reciprocating Parts
 Chapter 15 Inertia Forces in Reciprocating Parts 2 Approximate Analytical Method for Velocity and Acceleration of the Piston n = Ratio of length of ConRod to radius of crank = l/r 3 Approximate Analytical
Chapter 15 Inertia Forces in Reciprocating Parts 2 Approximate Analytical Method for Velocity and Acceleration of the Piston n = Ratio of length of ConRod to radius of crank = l/r 3 Approximate Analytical
B.TECH III Year I Semester (R09) Regular & Supplementary Examinations November 2012 DYNAMICS OF MACHINERY
 Regular & Supplementary Examinations November 2012 DYNAMICS OF MACHINERY") 1 B.TECH III Year I Semester (R09) Regular & Supplementary Examinations November 2012 DYNAMICS OF MACHINERY (Mechanical Engineering) Time: 3 hours Max. Marks: 70 Answer any FIVE questions All questions
1 B.TECH III Year I Semester (R09) Regular & Supplementary Examinations November 2012 DYNAMICS OF MACHINERY (Mechanical Engineering) Time: 3 hours Max. Marks: 70 Answer any FIVE questions All questions
R10 Set No: 1 ''' ' '' '' '' Code No: R31033
 R10 Set No: 1 III B.Tech. I Semester Regular and Supplementary Examinations, December - 2013 DYNAMICS OF MACHINERY (Common to Mechanical Engineering and Automobile Engineering) Time: 3 Hours Max Marks:
R10 Set No: 1 III B.Tech. I Semester Regular and Supplementary Examinations, December - 2013 DYNAMICS OF MACHINERY (Common to Mechanical Engineering and Automobile Engineering) Time: 3 Hours Max Marks:
III B.Tech I Semester Supplementary Examinations, May/June
 Set No. 1 III B.Tech I Semester Supplementary Examinations, May/June - 2015 1 a) Derive the expression for Gyroscopic Couple? b) A disc with radius of gyration of 60mm and a mass of 4kg is mounted centrally
Set No. 1 III B.Tech I Semester Supplementary Examinations, May/June - 2015 1 a) Derive the expression for Gyroscopic Couple? b) A disc with radius of gyration of 60mm and a mass of 4kg is mounted centrally
Chapter 7: DC Motors and Transmissions. 7.1: Basic Definitions and Concepts
 Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
Chapter 15. Inertia Forces in Reciprocating Parts
 Chapter 15 Inertia Forces in Reciprocating Parts 2 Approximate Analytical Method for Velocity & Acceleration of the Piston n = Ratio of length of ConRod to radius of crank = l/r 3 Approximate Analytical
Chapter 15 Inertia Forces in Reciprocating Parts 2 Approximate Analytical Method for Velocity & Acceleration of the Piston n = Ratio of length of ConRod to radius of crank = l/r 3 Approximate Analytical
CHAPTER 1 MECHANICAL ARRANGEMENT
 CHAPTER 1 CHAPTER 1 MECHANICAL ARRANGEMENT CONTENTS PAGE Basic Principals 02 The Crankshaft 06 Piston Attachment 08 Major Assemblies 10 Valve Gear 12 Cam Drive 18 Mechanical Arrangement - Basic Principals
CHAPTER 1 CHAPTER 1 MECHANICAL ARRANGEMENT CONTENTS PAGE Basic Principals 02 The Crankshaft 06 Piston Attachment 08 Major Assemblies 10 Valve Gear 12 Cam Drive 18 Mechanical Arrangement - Basic Principals
SHOCK DYNAMOMETER: WHERE THE GRAPHS COME FROM
 SHOCK DYNAMOMETER: WHERE THE GRAPHS COME FROM Dampers are the hot race car component of the 90s. The two racing topics that were hot in the 80s, suspension geometry and data acquisition, have been absorbed
SHOCK DYNAMOMETER: WHERE THE GRAPHS COME FROM Dampers are the hot race car component of the 90s. The two racing topics that were hot in the 80s, suspension geometry and data acquisition, have been absorbed
Basic Wheel Alignment Techniques
 Basic Wheel Alignment Techniques MASTERING THE BASICS: Modern steering and suspension systems are great examples of solid geometry at work. Wheel alignment integrates all the factors of steering and suspension
Basic Wheel Alignment Techniques MASTERING THE BASICS: Modern steering and suspension systems are great examples of solid geometry at work. Wheel alignment integrates all the factors of steering and suspension
Simple Gears and Transmission
 Simple Gears and Transmission Contents How can transmissions be designed so that they provide the force, speed and direction required and how efficient will the design be? Initial Problem Statement 2 Narrative
Simple Gears and Transmission Contents How can transmissions be designed so that they provide the force, speed and direction required and how efficient will the design be? Initial Problem Statement 2 Narrative
CHAPTER 3 ENGINE TYPES
 CHAPTER 3 CHAPTER 3 ENGINE TYPES CONTENTS PAGE Multi-Cylinders 02 Firing orders 06 2 Stroke Cycle 08 Diesel Cycle 10 Wankel Engine 12 Radial/Rotary 14 Engine Types Multi Cylinders Below are illustrated
CHAPTER 3 CHAPTER 3 ENGINE TYPES CONTENTS PAGE Multi-Cylinders 02 Firing orders 06 2 Stroke Cycle 08 Diesel Cycle 10 Wankel Engine 12 Radial/Rotary 14 Engine Types Multi Cylinders Below are illustrated
Roehrig Engineering, Inc.
 Roehrig Engineering, Inc. Home Contact Us Roehrig News New Products Products Software Downloads Technical Info Forums What Is a Shock Dynamometer? by Paul Haney, Sept. 9, 2004 Racers are beginning to realize
Roehrig Engineering, Inc. Home Contact Us Roehrig News New Products Products Software Downloads Technical Info Forums What Is a Shock Dynamometer? by Paul Haney, Sept. 9, 2004 Racers are beginning to realize
Reduction of Self Induced Vibration in Rotary Stirling Cycle Coolers
 Reduction of Self Induced Vibration in Rotary Stirling Cycle Coolers U. Bin-Nun FLIR Systems Inc. Boston, MA 01862 ABSTRACT Cryocooler self induced vibration is a major consideration in the design of IR
Reduction of Self Induced Vibration in Rotary Stirling Cycle Coolers U. Bin-Nun FLIR Systems Inc. Boston, MA 01862 ABSTRACT Cryocooler self induced vibration is a major consideration in the design of IR
GENERAL BALANCE INTRODUCTION. Balanced engines generally:
 Engine Balance Ken Helmick Metal Model Maker General Motors Powertrain This article is intended to give the reader an appreciation for the processes necessary to build balanced engines. GENERAL BALANCE
Engine Balance Ken Helmick Metal Model Maker General Motors Powertrain This article is intended to give the reader an appreciation for the processes necessary to build balanced engines. GENERAL BALANCE
Inside a typical car engine. Almost all cars today use a reciprocating internal combustion engine because this engine is:
 Tech Torque HOW PETROL ENGINES WORK The Basics The purpose of a gasoline car engine is to convert gasoline into motion so that your car can move. Currently the easiest way to create motion from gasoline
Tech Torque HOW PETROL ENGINES WORK The Basics The purpose of a gasoline car engine is to convert gasoline into motion so that your car can move. Currently the easiest way to create motion from gasoline
Theory of Machines. CH-1: Fundamentals and type of Mechanisms
 CH-1: Fundamentals and type of Mechanisms 1. Define kinematic link and kinematic chain. 2. Enlist the types of constrained motion. Draw a label sketch of any one. 3. Define (1) Mechanism (2) Inversion
CH-1: Fundamentals and type of Mechanisms 1. Define kinematic link and kinematic chain. 2. Enlist the types of constrained motion. Draw a label sketch of any one. 3. Define (1) Mechanism (2) Inversion
Bimotion Advanced Port & Pipe Case study A step by step guide about how to calculate a 2-stroke engine.
 Bimotion Advanced Port & Pipe Case study A step by step guide about how to calculate a 2-stroke engine. 2009/aug/21. Bimotion. This paper is free for distribution and may be revised, for further references
Bimotion Advanced Port & Pipe Case study A step by step guide about how to calculate a 2-stroke engine. 2009/aug/21. Bimotion. This paper is free for distribution and may be revised, for further references
Technical Report Con Rod Length, Stroke, Piston Pin Offset, Piston Motion and Dwell in the Lotus-Ford Twin Cam Engine. T. L. Duell.
 Technical Report - 1 Con Rod Length, Stroke, Piston Pin Offset, Piston Motion and Dwell in the Lotus-Ford Twin Cam Engine by T. L. Duell May 24 Terry Duell consulting 19 Rylandes Drive, Gladstone Park
Technical Report - 1 Con Rod Length, Stroke, Piston Pin Offset, Piston Motion and Dwell in the Lotus-Ford Twin Cam Engine by T. L. Duell May 24 Terry Duell consulting 19 Rylandes Drive, Gladstone Park
Balancing of Reciprocating Parts
 Balancing of Reciprocating Parts We had these forces: Primary and Secondary Unbalanced Forces of Reciprocating Masses m = Mass of the reciprocating parts, l = Length of the connecting rod PC, r = Radius
Balancing of Reciprocating Parts We had these forces: Primary and Secondary Unbalanced Forces of Reciprocating Masses m = Mass of the reciprocating parts, l = Length of the connecting rod PC, r = Radius
The Mark Ortiz Automotive
 August 2004 WELCOME Mark Ortiz Automotive is a chassis consulting service primarily serving oval track and road racers. This newsletter is a free service intended to benefit racers and enthusiasts by offering
August 2004 WELCOME Mark Ortiz Automotive is a chassis consulting service primarily serving oval track and road racers. This newsletter is a free service intended to benefit racers and enthusiasts by offering
Railway Technical Web Pages
 Railway Technical Web Pages Archive Page Vehicle Suspension Systems Introduction Almost all railway vehicles use bogies (trucks in US parlance) to carry and guide the body along the track. Bogie suspension
Railway Technical Web Pages Archive Page Vehicle Suspension Systems Introduction Almost all railway vehicles use bogies (trucks in US parlance) to carry and guide the body along the track. Bogie suspension
9 Locomotive Compensation
 Part 3 Section 9 Locomotive Compensation August 2008 9 Locomotive Compensation Introduction Traditionally, model locomotives have been built with a rigid chassis. Some builders looking for more realism
Part 3 Section 9 Locomotive Compensation August 2008 9 Locomotive Compensation Introduction Traditionally, model locomotives have been built with a rigid chassis. Some builders looking for more realism
LESSON Transmission of Power Introduction
 LESSON 3 3.0 Transmission of Power 3.0.1 Introduction Earlier in our previous course units in Agricultural and Biosystems Engineering, we introduced ourselves to the concept of support and process systems
LESSON 3 3.0 Transmission of Power 3.0.1 Introduction Earlier in our previous course units in Agricultural and Biosystems Engineering, we introduced ourselves to the concept of support and process systems
SAMPLE STUDY MATERIAL
 IC Engine - ME GATE, IES, PSU 1 SAMPLE STUDY MATERIAL Mechanical Engineering ME Postal Correspondence Course Internal Combustion Engine GATE, IES & PSUs IC Engine - ME GATE, IES, PSU 2 C O N T E N T 1.
IC Engine - ME GATE, IES, PSU 1 SAMPLE STUDY MATERIAL Mechanical Engineering ME Postal Correspondence Course Internal Combustion Engine GATE, IES & PSUs IC Engine - ME GATE, IES, PSU 2 C O N T E N T 1.
In order to discuss powerplants in any depth, it is essential to understand the concepts of POWER and TORQUE.
 -Power and Torque - ESSENTIAL CONCEPTS: Torque is measured; Power is calculated In order to discuss powerplants in any depth, it is essential to understand the concepts of POWER and TORQUE. HOWEVER, in
-Power and Torque - ESSENTIAL CONCEPTS: Torque is measured; Power is calculated In order to discuss powerplants in any depth, it is essential to understand the concepts of POWER and TORQUE. HOWEVER, in
PRECISION BELLOWS COUPLINGS
 PRECISION BELLOWS COUPLINGS Bellows couplings are used where precise rotation, high speeds, and dynamic motion must be transmitted. They exhibit zero backlash and a high level of torsional stiffness, offering
PRECISION BELLOWS COUPLINGS Bellows couplings are used where precise rotation, high speeds, and dynamic motion must be transmitted. They exhibit zero backlash and a high level of torsional stiffness, offering
Moments. It doesn t fall because of the presence of a counter balance weight on the right-hand side. The boom is therefore balanced.
 Moments The crane in the image below looks unstable, as though it should topple over. There appears to be too much of the boom on the left-hand side of the tower. It doesn t fall because of the presence
Moments The crane in the image below looks unstable, as though it should topple over. There appears to be too much of the boom on the left-hand side of the tower. It doesn t fall because of the presence
Save Thousands of Dollars Per Year!
 Save Thousands of Dollars Per Year! Simsite Re-Engineered Double Suction Impeller Re-Engineer Your Impellers! Pump Company Since 1919 Simsite Structural Composite Pumps, Impellers, Rings and Parts Custom
Save Thousands of Dollars Per Year! Simsite Re-Engineered Double Suction Impeller Re-Engineer Your Impellers! Pump Company Since 1919 Simsite Structural Composite Pumps, Impellers, Rings and Parts Custom
Compact 6-Speed and Reverse Gearbox
 Compact 6-Speed and Reverse Gearbox By Alan Wenbourne Downloaded from the South East London Meccano Club Website www.selmec.org.uk The Gearbox During the construction of my demonstration Direct Shift Gearbox
Compact 6-Speed and Reverse Gearbox By Alan Wenbourne Downloaded from the South East London Meccano Club Website www.selmec.org.uk The Gearbox During the construction of my demonstration Direct Shift Gearbox
CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES
 CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES Upon completion of this chapter, you should be able to do the following: Compare the types of gears and their advantages. Did you ever take a clock apart to
CHAPTER 6 GEARS CHAPTER LEARNING OBJECTIVES Upon completion of this chapter, you should be able to do the following: Compare the types of gears and their advantages. Did you ever take a clock apart to
INTRODUCTION Principle
 DC Generators INTRODUCTION A generator is a machine that converts mechanical energy into electrical energy by using the principle of magnetic induction. Principle Whenever a conductor is moved within a
DC Generators INTRODUCTION A generator is a machine that converts mechanical energy into electrical energy by using the principle of magnetic induction. Principle Whenever a conductor is moved within a
NEW DESIGN AND DEVELELOPMENT OF ESKIG MOTORCYCLE
 NEW DESIGN AND DEVELELOPMENT OF ESKIG MOTORCYCLE Eskinder Girma PG Student Department of Automobile Engineering, M.I.T Campus, Anna University, Chennai-44, India. Email: eskindergrm@gmail.com Mobile no:7299391869
NEW DESIGN AND DEVELELOPMENT OF ESKIG MOTORCYCLE Eskinder Girma PG Student Department of Automobile Engineering, M.I.T Campus, Anna University, Chennai-44, India. Email: eskindergrm@gmail.com Mobile no:7299391869
Rotational Kinematics and Dynamics Review
 Rotational Kinematics and Dynamics Review 1. The Earth takes slightly less than one day to complete one rotation about the axis passing through its poles. The actual time is 8.616 10 4 s. Given this information,
Rotational Kinematics and Dynamics Review 1. The Earth takes slightly less than one day to complete one rotation about the axis passing through its poles. The actual time is 8.616 10 4 s. Given this information,
Unit V HYDROSTATIC DRIVE AND ELECTRIC DRIVE
 Unit V HYDROSTATIC DRIVE AND ELECTRIC DRIVE HYDROSTATIC DRIVE In this type of drives a hydrostatic pump and a motor is used. The engine drives the pump and it generates hydrostatic pressure on the fluid.
Unit V HYDROSTATIC DRIVE AND ELECTRIC DRIVE HYDROSTATIC DRIVE In this type of drives a hydrostatic pump and a motor is used. The engine drives the pump and it generates hydrostatic pressure on the fluid.
Improvement of Vehicle Dynamics by Right-and-Left Torque Vectoring System in Various Drivetrains x
 Improvement of Vehicle Dynamics by Right-and-Left Torque Vectoring System in Various Drivetrains x Kaoru SAWASE* Yuichi USHIRODA* Abstract This paper describes the verification by calculation of vehicle
Improvement of Vehicle Dynamics by Right-and-Left Torque Vectoring System in Various Drivetrains x Kaoru SAWASE* Yuichi USHIRODA* Abstract This paper describes the verification by calculation of vehicle
Supervisor: Johan Abrahamsson Author: Tomas Löfwall. Measuring Acceleration in Vehicles using the AccBox System Results and Discussion
 Measuring Acceleration in Vehicles using the AccBox System Results and Discussion Innehåll Measuring Acceleration in Vehicles using the AccBox System Results and Discussion... 1 Abstract... 3 Results and
Measuring Acceleration in Vehicles using the AccBox System Results and Discussion Innehåll Measuring Acceleration in Vehicles using the AccBox System Results and Discussion... 1 Abstract... 3 Results and
Pearls from Martin J. King Quarter Wave Design
 Pearls from Martin J. King Quarter Wave Design An introduction by Bjorn Johannesen, Denmark. September the 1 st 2005. The first time you visit http://www.quarter-wave.com/, you might get overwhelmed by
Pearls from Martin J. King Quarter Wave Design An introduction by Bjorn Johannesen, Denmark. September the 1 st 2005. The first time you visit http://www.quarter-wave.com/, you might get overwhelmed by
You have probably noticed that there are several camps
 Pump Ed 101 Joe Evans, Ph.D. Comparing Energy Consumption: To VFD or Not to VFD You have probably noticed that there are several camps out there when it comes to centrifugal pump applications involving
Pump Ed 101 Joe Evans, Ph.D. Comparing Energy Consumption: To VFD or Not to VFD You have probably noticed that there are several camps out there when it comes to centrifugal pump applications involving
2. Write the expression for estimation of the natural frequency of free torsional vibration of a shaft. (N/D 15)
") ME 6505 DYNAMICS OF MACHINES Fifth Semester Mechanical Engineering (Regulations 2013) Unit III PART A 1. Write the mathematical expression for a free vibration system with viscous damping. (N/D 15) Viscous
ME 6505 DYNAMICS OF MACHINES Fifth Semester Mechanical Engineering (Regulations 2013) Unit III PART A 1. Write the mathematical expression for a free vibration system with viscous damping. (N/D 15) Viscous
CH16: Clutches, Brakes, Couplings and Flywheels
 CH16: Clutches, Brakes, Couplings and Flywheels These types of elements are associated with rotation and they have in common the function of dissipating, transferring and/or storing rotational energy.
CH16: Clutches, Brakes, Couplings and Flywheels These types of elements are associated with rotation and they have in common the function of dissipating, transferring and/or storing rotational energy.
ENGINES ENGINE OPERATION
 ENGINES ENGINE OPERATION Because the most widely used piston engine is the four-stroke cycle type, it will be used as the example for this section, Engine Operation and as the basis for comparison in the
ENGINES ENGINE OPERATION Because the most widely used piston engine is the four-stroke cycle type, it will be used as the example for this section, Engine Operation and as the basis for comparison in the
Single Phase Induction Motors
 Single Phase Induction Motors Prof. T. H. Panchal Asst. Professor Department of Electrical Engineering Institute of Technology Nirma University, Ahmedabad Introduction As the name suggests, these motors
Single Phase Induction Motors Prof. T. H. Panchal Asst. Professor Department of Electrical Engineering Institute of Technology Nirma University, Ahmedabad Introduction As the name suggests, these motors
NEW CONCEPT OF A ROCKER ENGINE KINEMATIC ANALYSIS
 Journal of KONES Powertrain and Transport, Vol. 19, No. 3 2012 NEW CONCEPT OF A ROCKER ENGINE KINEMATIC ANALYSIS Miros aw Szymkowiak Kochanowskiego Street 13, 64-100 Leszno, Poland e-mail: szymkowiak@op.pl
Journal of KONES Powertrain and Transport, Vol. 19, No. 3 2012 NEW CONCEPT OF A ROCKER ENGINE KINEMATIC ANALYSIS Miros aw Szymkowiak Kochanowskiego Street 13, 64-100 Leszno, Poland e-mail: szymkowiak@op.pl
Metal forming machines: a new market for laser interferometers O. Beltrami STANIMUC Ente Federate UNI, via A. Vespucci 8, Tbrmo,
 Metal forming machines: a new market for laser interferometers O. Beltrami STANIMUC Ente Federate UNI, via A. Vespucci 8, Tbrmo, Abstract Laser interferometers have traditionally been a synonymous of very
Metal forming machines: a new market for laser interferometers O. Beltrami STANIMUC Ente Federate UNI, via A. Vespucci 8, Tbrmo, Abstract Laser interferometers have traditionally been a synonymous of very
Why do the dots go where they do?
 Reprinted from Real Answers Why do the dots go where they do? Volume 13, Issue 1 trucktires.com 1-800-543-7522 ask the DOCTOR Bridgestone tires have either a red or yellow dot, which can be used to mount
Reprinted from Real Answers Why do the dots go where they do? Volume 13, Issue 1 trucktires.com 1-800-543-7522 ask the DOCTOR Bridgestone tires have either a red or yellow dot, which can be used to mount
UNIT - III GYROSCOPE
 UNIT - III GYROSCOPE Introduction 1When a body moves along a curved path, a force in the direction of centripetal acceleration (centripetal force ) has to be applied externally This external force is known
UNIT - III GYROSCOPE Introduction 1When a body moves along a curved path, a force in the direction of centripetal acceleration (centripetal force ) has to be applied externally This external force is known
LEAD SCREWS 101 A BASIC GUIDE TO IMPLEMENTING A LEAD SCREW ASSEMBLY FOR ANY DESIGN
 LEAD SCREWS 101 A BASIC GUIDE TO IMPLEMENTING A LEAD SCREW ASSEMBLY FOR ANY DESIGN Released by: Keith Knight Kerk Products Division Haydon Kerk Motion Solutions Lead Screws 101: A Basic Guide to Implementing
LEAD SCREWS 101 A BASIC GUIDE TO IMPLEMENTING A LEAD SCREW ASSEMBLY FOR ANY DESIGN Released by: Keith Knight Kerk Products Division Haydon Kerk Motion Solutions Lead Screws 101: A Basic Guide to Implementing
Bistable Rotary Solenoid
 Bistable Rotary Solenoid The bistable rotary solenoid changes state with the application of a momentary pulse of electricity, and then remains in the changed state without power applied until a further
Bistable Rotary Solenoid The bistable rotary solenoid changes state with the application of a momentary pulse of electricity, and then remains in the changed state without power applied until a further
THE NEW MULTI-BILLION DOLLAR ENGINE: WHY THE EXPERTS
 THE NEW MULTI-BILLION DOLLAR ENGINE: WHY THE EXPERTS ARE SO EXCITED! The Counterpoise Bi-Radial Engine Will Cause A Revolution In Engine Building. An explanation from the Chief Science Officer. ebook The
THE NEW MULTI-BILLION DOLLAR ENGINE: WHY THE EXPERTS ARE SO EXCITED! The Counterpoise Bi-Radial Engine Will Cause A Revolution In Engine Building. An explanation from the Chief Science Officer. ebook The
Fundamental Specifications for Eliminating Resonance on Reciprocating Machinery
 1 Fundamental Specifications for Eliminating Resonance on Reciprocating Machinery Frank Fifer, P.Eng. Beta Machinery Analysis Ltd. Houston, Texas Introduction Question: What is the purpose of performing
1 Fundamental Specifications for Eliminating Resonance on Reciprocating Machinery Frank Fifer, P.Eng. Beta Machinery Analysis Ltd. Houston, Texas Introduction Question: What is the purpose of performing
SECTION A DYNAMICS. Attempt any two questions from this section
 SECTION A DYNAMICS Question 1 (a) What is the difference between a forced vibration and a free or natural vibration? [2 marks] (b) Describe an experiment to measure the effects of an out of balance rotating
SECTION A DYNAMICS Question 1 (a) What is the difference between a forced vibration and a free or natural vibration? [2 marks] (b) Describe an experiment to measure the effects of an out of balance rotating
Hydraulic energy control, conductive part
 Chapter 2 2 Hydraulic energy control, conductive part Chapter 2 Hydraulic energy control, conductive part To get the hydraulic energy generated by the hydraulic pump to the actuator, cylinder or hydraulic
Chapter 2 2 Hydraulic energy control, conductive part Chapter 2 Hydraulic energy control, conductive part To get the hydraulic energy generated by the hydraulic pump to the actuator, cylinder or hydraulic
American International Journal of Research in Science, Technology, Engineering & Mathematics INDIA
 American International Journal of Research in Science, Technology, Engineering & Mathematics Available online at http://www.iasir.net ISSN (Print): 2328-3491, ISSN (Online): 2328-3580, ISSN (CD-ROM): 2328-3629
American International Journal of Research in Science, Technology, Engineering & Mathematics Available online at http://www.iasir.net ISSN (Print): 2328-3491, ISSN (Online): 2328-3580, ISSN (CD-ROM): 2328-3629
MECHANICAL EQUIPMENT. Engineering. Theory & Practice. Vibration & Rubber Engineering Solutions
 MECHANICAL EQUIPMENT Engineering Theory & Practice Vibration & Rubber Engineering Solutions The characteristic of an anti-vibration mounting that mainly determines its efficiency as a device for storing
MECHANICAL EQUIPMENT Engineering Theory & Practice Vibration & Rubber Engineering Solutions The characteristic of an anti-vibration mounting that mainly determines its efficiency as a device for storing
Transmission Error in Screw Compressor Rotors
 Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 2008 Transmission Error in Screw Compressor Rotors Jack Sauls Trane Follow this and additional
Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 2008 Transmission Error in Screw Compressor Rotors Jack Sauls Trane Follow this and additional
Application Information
 Moog Components Group manufactures a comprehensive line of brush-type and brushless motors, as well as brushless controllers. The purpose of this document is to provide a guide for the selection and application
Moog Components Group manufactures a comprehensive line of brush-type and brushless motors, as well as brushless controllers. The purpose of this document is to provide a guide for the selection and application
NEW CAR TIPS. Teaching Guidelines
 NEW CAR TIPS Teaching Guidelines Subject: Algebra Topics: Patterns and Functions Grades: 7-12 Concepts: Independent and dependent variables Slope Direct variation (optional) Knowledge and Skills: Can relate
NEW CAR TIPS Teaching Guidelines Subject: Algebra Topics: Patterns and Functions Grades: 7-12 Concepts: Independent and dependent variables Slope Direct variation (optional) Knowledge and Skills: Can relate
A Practical Guide to Free Energy Devices
 A Practical Guide to Free Energy Devices Part PatD20: Last updated: 26th September 2006 Author: Patrick J. Kelly This patent covers a device which is claimed to have a greater output power than the input
A Practical Guide to Free Energy Devices Part PatD20: Last updated: 26th September 2006 Author: Patrick J. Kelly This patent covers a device which is claimed to have a greater output power than the input
2. a) What is pantograph? What are its uses? b) Prove that the peaucellier mechanism generates a straight-line motion. (5M+10M)
 What is pantograph? What are its uses? b) Prove that the peaucellier mechanism generates a straight-line motion. (5M+10M)") Code No: R22032 R10 SET - 1 1. a) Define the following terms? i) Link ii) Kinematic pair iii) Degrees of freedom b) What are the inversions of double slider crank chain? Describe any two with neat sketches.
Code No: R22032 R10 SET - 1 1. a) Define the following terms? i) Link ii) Kinematic pair iii) Degrees of freedom b) What are the inversions of double slider crank chain? Describe any two with neat sketches.
Product design: Mechanical systems
 Product design: Mechanical systems Recall Mechanisms can: change direction of movement, e.g. from clockwise to anticlockwise or from horizontal to vertical; change type of movement, e.g. from rotating
Product design: Mechanical systems Recall Mechanisms can: change direction of movement, e.g. from clockwise to anticlockwise or from horizontal to vertical; change type of movement, e.g. from rotating
LECTURE-23: Basic concept of Hydro-Static Transmission (HST) Systems
 Systems") MODULE-6 : HYDROSTATIC TRANSMISSION SYSTEMS LECTURE-23: Basic concept of Hydro-Static Transmission (HST) Systems 1. INTRODUCTION The need for large power transmissions in tight space and their control
MODULE-6 : HYDROSTATIC TRANSMISSION SYSTEMS LECTURE-23: Basic concept of Hydro-Static Transmission (HST) Systems 1. INTRODUCTION The need for large power transmissions in tight space and their control
Lab #3 - Slider-Crank Lab
 Lab #3 - Slider-Crank Lab Revised March 19, 2012 INTRODUCTION In this lab we look at the kinematics of some mechanisms which convert rotary motion into oscillating linear motion and vice-versa. In kinematics
Lab #3 - Slider-Crank Lab Revised March 19, 2012 INTRODUCTION In this lab we look at the kinematics of some mechanisms which convert rotary motion into oscillating linear motion and vice-versa. In kinematics
A short explanation of the modifications made in a poor quality ECU remap
 HDI-Tuning Limited A short explanation of the modifications made in a poor quality ECU remap Steven Lewis 12 Introduction This document has been written to educate those planning on using a poor quality
HDI-Tuning Limited A short explanation of the modifications made in a poor quality ECU remap Steven Lewis 12 Introduction This document has been written to educate those planning on using a poor quality
Magnetic Engine Magnetic head to head collision repulsive piston engine (MHCRPE)
") www.ijecs.in International Journal Of Engineering And Computer Science ISSN:2319-7242 Volume 6 Issue 11 November 2017, Page No. 22836-22843 Index Copernicus value (2015): 58.10 DOI: 10.18535/ijecs/v6i11.02
www.ijecs.in International Journal Of Engineering And Computer Science ISSN:2319-7242 Volume 6 Issue 11 November 2017, Page No. 22836-22843 Index Copernicus value (2015): 58.10 DOI: 10.18535/ijecs/v6i11.02
(Refer Slide Time: 1:13)
") Fluid Dynamics And Turbo Machines. Professor Dr Dhiman Chatterjee. Department Of Mechanical Engineering. Indian Institute Of Technology Madras. Part A. Module-2. Lecture-2. Turbomachines: Definition and
Fluid Dynamics And Turbo Machines. Professor Dr Dhiman Chatterjee. Department Of Mechanical Engineering. Indian Institute Of Technology Madras. Part A. Module-2. Lecture-2. Turbomachines: Definition and
UNIT IV INTERNAL COMBUSTION ENGINES
 UNIT IV INTERNAL COMBUSTION ENGINES Objectives After the completion of this chapter, Students 1. To know the different parts of IC engines and their functions. 2. To understand the working principle of
UNIT IV INTERNAL COMBUSTION ENGINES Objectives After the completion of this chapter, Students 1. To know the different parts of IC engines and their functions. 2. To understand the working principle of
Sequoia power steering rack service Match-mounting wheels and tires Oxygen sensor circuit diagnosis
 In this issue: Sequoia power steering rack service Match-mounting wheels and tires Oxygen sensor circuit diagnosis PHASE MATCHING Often referred to as match mounting, phase matching involves mounting the
In this issue: Sequoia power steering rack service Match-mounting wheels and tires Oxygen sensor circuit diagnosis PHASE MATCHING Often referred to as match mounting, phase matching involves mounting the
Driver Driven. InputSpeed. Gears
 Gears Gears are toothed wheels designed to transmit rotary motion and power from one part of a mechanism to another. They are fitted to shafts with special devices called keys (or splines) that ensure
Gears Gears are toothed wheels designed to transmit rotary motion and power from one part of a mechanism to another. They are fitted to shafts with special devices called keys (or splines) that ensure
KINEMATICS OF MACHINARY UBMC302 QUESTION BANK UNIT-I BASICS OF MECHANISMS PART-A
 KINEMATICS OF MACHINARY UBMC302 QUESTION BANK UNIT-I BASICS OF MECHANISMS PART-A 1. Define the term Kinematic link. 2. Classify kinematic links. 3. What is Mechanism? 4. Define the terms Kinematic pair.
KINEMATICS OF MACHINARY UBMC302 QUESTION BANK UNIT-I BASICS OF MECHANISMS PART-A 1. Define the term Kinematic link. 2. Classify kinematic links. 3. What is Mechanism? 4. Define the terms Kinematic pair.
20th. SOLUTIONS for FLUID MOVEMENT, MEASUREMENT & CONTAINMENT. Do You Need a Booster Pump? Is Repeatability or Accuracy More Important?
 Do You Need a Booster Pump? Secrets to Flowmeter Selection Success Is Repeatability or Accuracy More Important? 20th 1995-2015 SOLUTIONS for FLUID MOVEMENT, MEASUREMENT & CONTAINMENT Special Section Inside!
Do You Need a Booster Pump? Secrets to Flowmeter Selection Success Is Repeatability or Accuracy More Important? 20th 1995-2015 SOLUTIONS for FLUID MOVEMENT, MEASUREMENT & CONTAINMENT Special Section Inside!
Compressor Noise Control
 Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 1972 Compressor Noise Control G. M. Diehl Ingersoll-Rand Research Follow this and additional
Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 1972 Compressor Noise Control G. M. Diehl Ingersoll-Rand Research Follow this and additional
FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT
 FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT Antti MAKELA, Jouni MATTILA, Mikko SIUKO, Matti VILENIUS Institute of Hydraulics and Automation, Tampere University of Technology P.O.Box
FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT Antti MAKELA, Jouni MATTILA, Mikko SIUKO, Matti VILENIUS Institute of Hydraulics and Automation, Tampere University of Technology P.O.Box
AT 2303 AUTOMOTIVE POLLUTION AND CONTROL Automobile Engineering Question Bank
 AT 2303 AUTOMOTIVE POLLUTION AND CONTROL Automobile Engineering Question Bank UNIT I INTRODUCTION 1. What are the design considerations of a vehicle?(jun 2013) 2..Classify the various types of vehicles.
AT 2303 AUTOMOTIVE POLLUTION AND CONTROL Automobile Engineering Question Bank UNIT I INTRODUCTION 1. What are the design considerations of a vehicle?(jun 2013) 2..Classify the various types of vehicles.
August 2001 THINGS THAT MAKE SPRING CHANGES WORK BACKWARDS
 August 2001 WELCOME Mark Ortiz Automotive is a chassis consulting service primarily serving oval track and road racers. This newsletter is a free service intended to benefit racers and enthusiasts by offering
August 2001 WELCOME Mark Ortiz Automotive is a chassis consulting service primarily serving oval track and road racers. This newsletter is a free service intended to benefit racers and enthusiasts by offering
CHAPTER 6 MECHANICAL SHOCK TESTS ON DIP-PCB ASSEMBLY
 135 CHAPTER 6 MECHANICAL SHOCK TESTS ON DIP-PCB ASSEMBLY 6.1 INTRODUCTION Shock is often defined as a rapid transfer of energy to a mechanical system, which results in a significant increase in the stress,
135 CHAPTER 6 MECHANICAL SHOCK TESTS ON DIP-PCB ASSEMBLY 6.1 INTRODUCTION Shock is often defined as a rapid transfer of energy to a mechanical system, which results in a significant increase in the stress,
MODIFICATION OF SLIDER CRANK MECHANISM AND STUDY OF THE CURVES ASSOCIATED WITH IT
 MODIFICATION OF SLIDER CRANK MECHANISM AND STUDY OF THE CURVES ASSOCIATED WITH IT Samiron Neog 1, Deep Singh 2, Prajnyan Ballav Goswami 3 1,2,3 Student,B. Tech.,Mechanical, Dibrugarh University Institute
MODIFICATION OF SLIDER CRANK MECHANISM AND STUDY OF THE CURVES ASSOCIATED WITH IT Samiron Neog 1, Deep Singh 2, Prajnyan Ballav Goswami 3 1,2,3 Student,B. Tech.,Mechanical, Dibrugarh University Institute
The Basics of Balancing 101
 The Basics of Balancing 101 Gary K. Grim Bruce J. Mitchell Copyright 2014 Balance Technology Inc. Do not Distribute or Duplicate without the Authorized Written Consent of BTI (Balance Technology Inc.)
The Basics of Balancing 101 Gary K. Grim Bruce J. Mitchell Copyright 2014 Balance Technology Inc. Do not Distribute or Duplicate without the Authorized Written Consent of BTI (Balance Technology Inc.)
Comparison - TE 80 and PCS HFFR
 Comparison - TE 80 and PCS HFFR For ISO 12156-1 and ASTM D6079 fuel lubricity standard tests, results from the TE 80 differ to those from the PCS HFRR. The TE 80 (and the TE 77 with low load adapter) consistently
Comparison - TE 80 and PCS HFFR For ISO 12156-1 and ASTM D6079 fuel lubricity standard tests, results from the TE 80 differ to those from the PCS HFRR. The TE 80 (and the TE 77 with low load adapter) consistently
FRONTAL OFF SET COLLISION
 FRONTAL OFF SET COLLISION MARC1 SOLUTIONS Rudy Limpert Short Paper PCB2 2014 www.pcbrakeinc.com 1 1.0. Introduction A crash-test-on- paper is an analysis using the forward method where impact conditions
FRONTAL OFF SET COLLISION MARC1 SOLUTIONS Rudy Limpert Short Paper PCB2 2014 www.pcbrakeinc.com 1 1.0. Introduction A crash-test-on- paper is an analysis using the forward method where impact conditions
OVERSIZED DERAILLEUR PULLEY EFFICIENCY TEST
 OVERSIZED DERAILLEUR PULLEY EFFICIENCY TEST SUMMARY 0.49 watts efficiency difference was measured between a 10T-10T pulley combination and a 15T-15T pulley combination, with chain tension and bearing variables
OVERSIZED DERAILLEUR PULLEY EFFICIENCY TEST SUMMARY 0.49 watts efficiency difference was measured between a 10T-10T pulley combination and a 15T-15T pulley combination, with chain tension and bearing variables
RE / STAR Tolerance Rings STAR Ball Knobs, Knob and Lever Type Handles
 RE 2 970/.99 STAR Tolerance Rings STAR Ball Knobs, Knob and Lever Type Handles STAR Tolerance Rings Product Overview Tolerance rings are made of hard, embossed spring steel strip and belong to the class
RE 2 970/.99 STAR Tolerance Rings STAR Ball Knobs, Knob and Lever Type Handles STAR Tolerance Rings Product Overview Tolerance rings are made of hard, embossed spring steel strip and belong to the class
Shock Absorbers What is Ride Control Vehicle Dynamics Suspension System Shock Absorbers Struts Terminology
 Home Tech Support Shock Absorbers Shock Absorbers What is Ride Control Vehicle Dynamics Suspension System Shock Absorbers Struts Terminology A BRIEF HISTORY These first shock absorbers were simply two
Home Tech Support Shock Absorbers Shock Absorbers What is Ride Control Vehicle Dynamics Suspension System Shock Absorbers Struts Terminology A BRIEF HISTORY These first shock absorbers were simply two
Introduction. Types of Governors. The governors may, broadly, be classified as. 1. Centrifugal governors, and 2. Inertia governors.
 TOM Governor Assi. Professor Mechanical Engineering Department Introduction The function of a governor is to regulate the mean speed of an engine, when there are variations in the load e.g. when the load
TOM Governor Assi. Professor Mechanical Engineering Department Introduction The function of a governor is to regulate the mean speed of an engine, when there are variations in the load e.g. when the load
White Paper: The Physics of Braking Systems
 White Paper: The Physics of Braking Systems The Conservation of Energy The braking system exists to convert the energy of a vehicle in motion into thermal energy, more commonly referred to as heat. From
White Paper: The Physics of Braking Systems The Conservation of Energy The braking system exists to convert the energy of a vehicle in motion into thermal energy, more commonly referred to as heat. From
UNIT 2. INTRODUCTION TO DC GENERATOR (Part 1) OBJECTIVES. General Objective
 OBJECTIVES. General Objective") DC GENERATOR (Part 1) E2063/ Unit 2/ 1 UNIT 2 INTRODUCTION TO DC GENERATOR (Part 1) OBJECTIVES General Objective : To apply the basic principle of DC generator, construction principle and types of DC generator.
DC GENERATOR (Part 1) E2063/ Unit 2/ 1 UNIT 2 INTRODUCTION TO DC GENERATOR (Part 1) OBJECTIVES General Objective : To apply the basic principle of DC generator, construction principle and types of DC generator.
10/29/2018. Chapter 16. Turning Moment Diagrams and Flywheel. Mohammad Suliman Abuhaiba, Ph.D., PE
 1 Chapter 16 Turning Moment Diagrams and Flywheel 2 Turning moment diagram (TMD) graphical representation of turning moment or crank-effort for various positions of the crank 3 Turning Moment Diagram for
1 Chapter 16 Turning Moment Diagrams and Flywheel 2 Turning moment diagram (TMD) graphical representation of turning moment or crank-effort for various positions of the crank 3 Turning Moment Diagram for
TORQUE CONVERTER. Section 2. Lesson Objectives. 6 TOYOTA Technical Training
 Section 2 TORQUE CONVERTER Lesson Objectives 1. Describe the function of the torque converter. 2. Identify the three major components of the torque converter that contribute to the multiplication of torque.
Section 2 TORQUE CONVERTER Lesson Objectives 1. Describe the function of the torque converter. 2. Identify the three major components of the torque converter that contribute to the multiplication of torque.
Principles of Electrical Engineering
 D.C GENERATORS Principle of operation of D.C machines, types of D.C Generators, e.m.f equation of D.C Generator, O.C.C of a D.C Shunt Generator, Load characteristics of D.C.Generators GENERATOR PRINCIPLE:
D.C GENERATORS Principle of operation of D.C machines, types of D.C Generators, e.m.f equation of D.C Generator, O.C.C of a D.C Shunt Generator, Load characteristics of D.C.Generators GENERATOR PRINCIPLE:
Introduction. Kinematics and Dynamics of Machines. Involute profile. 7. Gears
 Introduction The kinematic function of gears is to transfer rotational motion from one shaft to another Kinematics and Dynamics of Machines 7. Gears Since these shafts may be parallel, perpendicular, or
Introduction The kinematic function of gears is to transfer rotational motion from one shaft to another Kinematics and Dynamics of Machines 7. Gears Since these shafts may be parallel, perpendicular, or
Copyright Notice. Small Motor, Gearmotor and Control Handbook Copyright Bodine Electric Company. All rights reserved.
 Copyright Notice Small Motor, Gearmotor and Control Handbook Copyright 1993-2003 Bodine Electric Company. All rights reserved. Unauthorized duplication, distribution, or modification of this publication,
Copyright Notice Small Motor, Gearmotor and Control Handbook Copyright 1993-2003 Bodine Electric Company. All rights reserved. Unauthorized duplication, distribution, or modification of this publication,
Electromagnetic Fully Flexible Valve Actuator
 Electromagnetic Fully Flexible Valve Actuator A traditional cam drive train, shown in Figure 1, acts on the valve stems to open and close the valves. As the crankshaft drives the camshaft through gears
Electromagnetic Fully Flexible Valve Actuator A traditional cam drive train, shown in Figure 1, acts on the valve stems to open and close the valves. As the crankshaft drives the camshaft through gears
Angular Momentum Problems Challenge Problems
 Angular Momentum Problems Challenge Problems Problem 1: Toy Locomotive A toy locomotive of mass m L runs on a horizontal circular track of radius R and total mass m T. The track forms the rim of an otherwise
Angular Momentum Problems Challenge Problems Problem 1: Toy Locomotive A toy locomotive of mass m L runs on a horizontal circular track of radius R and total mass m T. The track forms the rim of an otherwise
Load Analysis and Multi Body Dynamics Analysis of Connecting Rod in Single Cylinder 4 Stroke Engine
 IJSRD - International Journal for Scientific Research & Development Vol. 3, Issue 08, 2015 ISSN (online): 2321-0613 Load Analysis and Multi Body Dynamics Analysis of Connecting Rod in Single Cylinder 4
IJSRD - International Journal for Scientific Research & Development Vol. 3, Issue 08, 2015 ISSN (online): 2321-0613 Load Analysis and Multi Body Dynamics Analysis of Connecting Rod in Single Cylinder 4
Introduction to Vibration & Pulsation in Reciprocating Compressors
 Introduction to Vibration & Pulsation in Reciprocating Compressors Shelley D. Greenfield, P.Eng. Vice President, Design Services sgreenfield@betamachinery.com Luis de la Roche Operations Manager ldelaroche@betamachinery.com
Introduction to Vibration & Pulsation in Reciprocating Compressors Shelley D. Greenfield, P.Eng. Vice President, Design Services sgreenfield@betamachinery.com Luis de la Roche Operations Manager ldelaroche@betamachinery.com