R&D Activities for Underwater Vehicles and Acoustic Communication
|
|
|
- Baldwin White
- 6 years ago
- Views:
Transcription


1 POGO 12 KORDI Perspective R&D Activities for Underwater Vehicles and Acoustic Communication 25 January, 211 Pan-Mook Lee
2 Presentation Outline Vehicles 1. ROV & Depressor [Hemire/Henuvy, 27] 2. AUV [ISIMI1, 29~211] 3. Mine Disposal Vehicle (MDV) [June 211] 4. Self-propelled Mining Robot [test miner MineRo, 29~212] UA Network 5. Underwater Acoustic Network [25~211] Future Works -2 -
 3,7 kg / 1,1 kg 2kg For./Lat./Vert. 1.5/1.")
 Up to 4 Cam (1 SIT), 2 lights,")
3 1. Deep-sea ROV & Depressor, Hemire/Henuvy Max. depth Dimension (LXBXH) Weight (R/D) Payload Max. speed (R) Thrusters 6, m 3.3m X 1.8 m X 2.2 m (ROV) 2.6 m X 1.2 m X 1.3 m (Depressor) 3,7 kg / 1,1 kg 2kg For./Lat./Vert. 1.5/1./1.5 knots 6 ea 5HP, BLDC motor driven Tether length 35 m (5m, 75m) Equipments (ROV) Equipments (Depressor) 3 CCD, SIT, Color & B/W Cam, HMI, lamps, CTD, Altimeter, P/T, IMU, DVL, FLS, MBS, USBL responder, Two 7-F Hydraulic Manipulators, Tool sled, Mission sensors (methane ) Up to 4 Cam (1 SIT), 2 lights, SSS, FLS, Altimeter, USBL responder, 8,5m armored cable, Two thrusters for head control -3 -




4 1. Operation of Hemire ROV -4 -




5 1. Launch & Recovery of Hemire/Henuvy 1 ROV Launch 2 Depressor Launch 3 Depressor Recovery 4 ROV Recovery -5 -





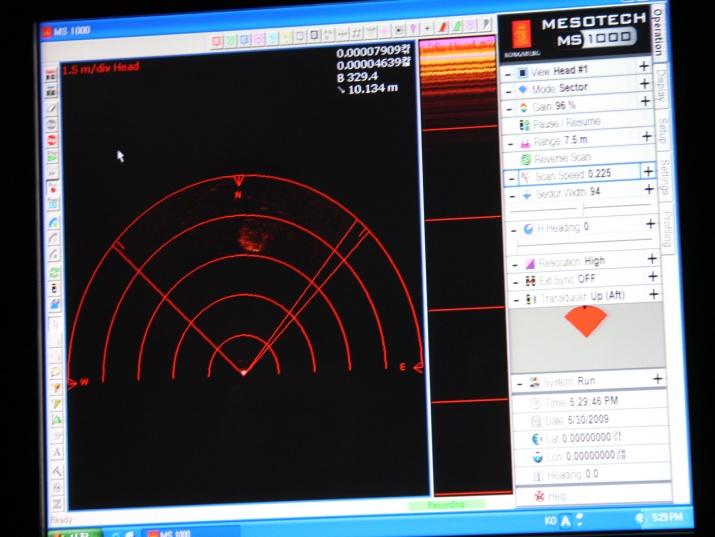
6 1. Deep-sea Survey of Hemire ROV Location : [ N, E] 7 km East from Pohang depth: 1.5m found methane hydrate CO (HS ppm) Methane (HS ppm) CH 4 CO Depth (cmbsf)


 7-7 -")
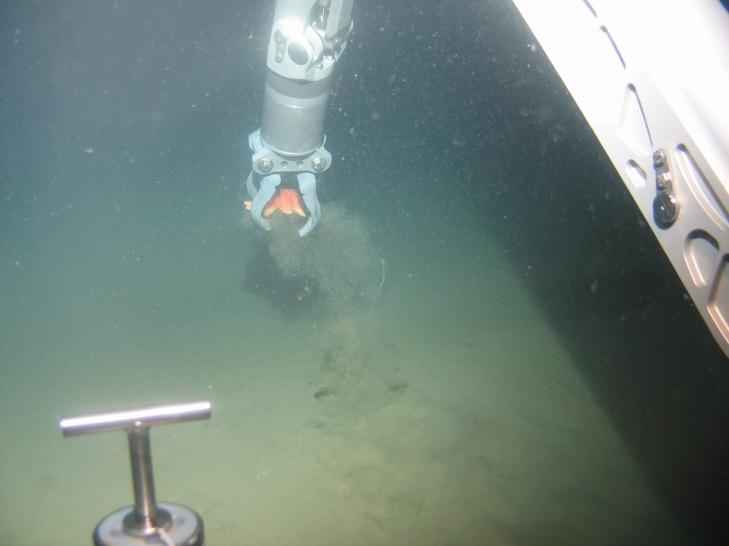

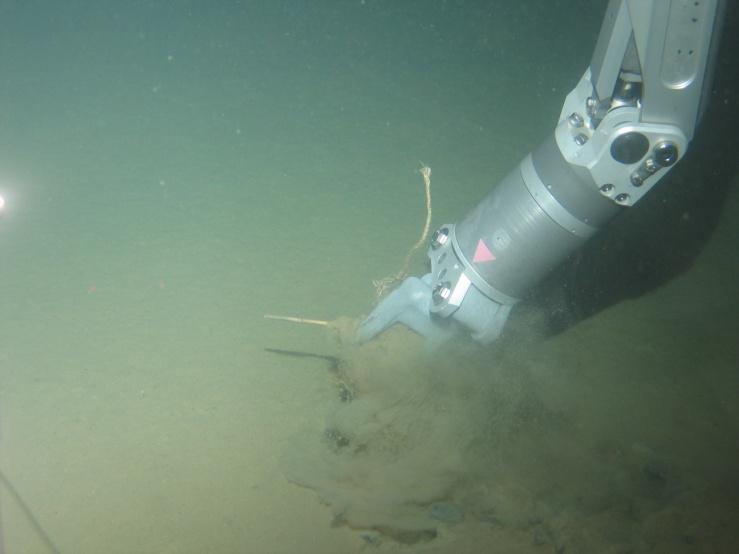
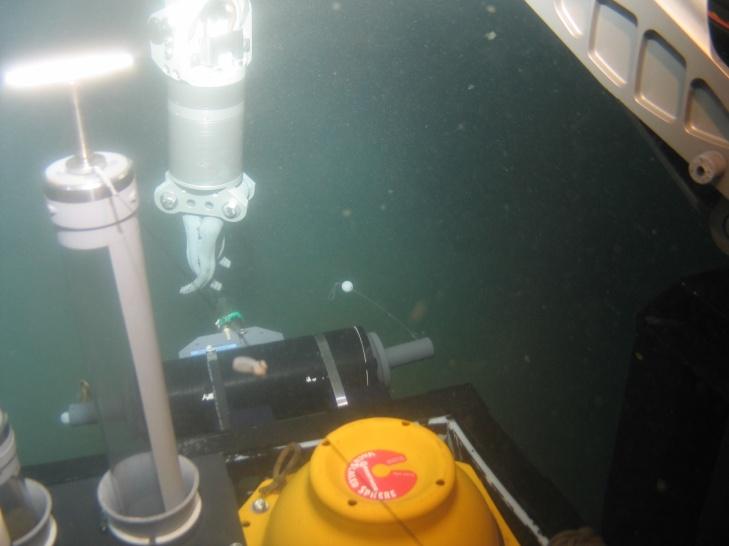
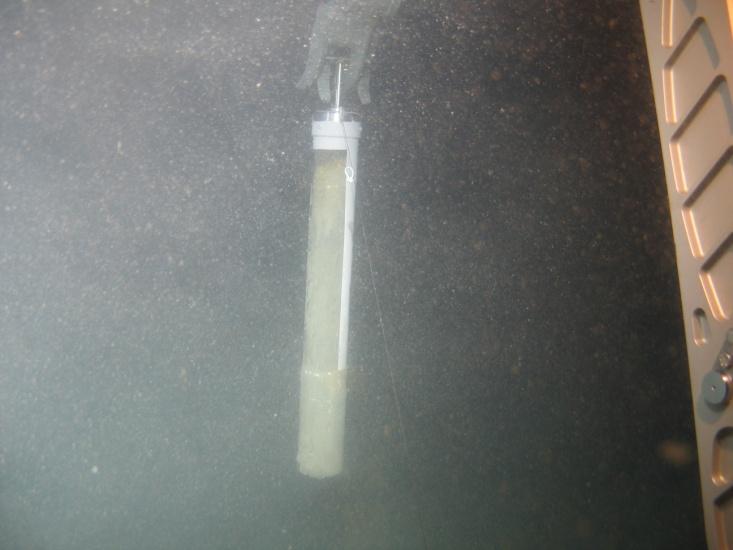

7 Survey Results of Hemire ROV (June, 29) 7-7 -


 -8-")




8 Survey Results of Hemire ROV 8 (June, 29) -8-




9 Specification of ISiMI1 Max. depth Dim./Weight Speed / Battery Equipments 2. ISiMI1 AUV 1 m.2 m x 1.58 m (D x L) / 38 kg 3 kts (max 4kts) / Lithium polymer battery GPS, DVL, ATM, IMU, Depth sensor, Docking System, Position tracking, Sonar system, RF & Wireless Communication ATM DVL Amp. & Sonar Amp. ATM Amp. Computer Frame Grabber HDD Motor controller, power converter, Voltage Checker CCD camera, depth sensor, Connect to external PC, RF antenna, Sonar DVL Computer I/O Board HDD Lithium Polymer battery Linear actuator BLDC motor -9 -

![theta [deg] depth [m] -4 5 1 15 2 25 4 2-2 5 1 15 2 25](/docs-images/78/76833743/images/10-2.jpg "2 1 response reference -1 5 1 15 2 25 time [sec] - 1 -")
10 2. Field Test of ISIMI1 AUV depth changing with keeping heading control 2 attitude PHI, THETA, PSI phi [deg] -2 theta [deg] depth [m] response reference time [sec] - 1 -
![2. Field Test of ISIMI1 AUV Side Scan Images Circular Motion Turning Experiment -5-1 UTM Y [m]](/docs-images/78/76833743/images/11-1.jpg "-15-2 -25-3 Zigzag Test (1 /1 ) 25 2 15 1 1/1 Zigzag Test - SSRI -35-4 -2 2 4 6 8 1 12 14 UTM X")
![[m] 1-1 Waypoint Tracking Waypoints Tracking Experiment Angles[degree] 5-5 Rudder Angle Heading](/docs-images/78/76833743/images/11-2.jpg "UTM Y [m] -2-3 -1-4 -15-2 -5-25 1 2 3 4 5 6 time[sec] -6 5 1 15 2 25 3 35 4 45 5 UTM X [m] - 11")
11 2. Field Test of ISIMI1 AUV Side Scan Images Circular Motion Turning Experiment -5-1 UTM Y [m] Zigzag Test (1 /1 ) /1 Zigzag Test - SSRI UTM X [m] 1-1 Waypoint Tracking Waypoints Tracking Experiment Angles[degree] 5-5 Rudder Angle Heading UTM Y [m] time[sec] UTM X [m]





12 2. AUV ISIMI - Docking U. Docking Docking Stage Using Vision Sensor & Lamps DOCK AUV Visually guided docking Acoustic Homing & Docking: USBL for homing, docking, & comm. of ISiMI AUV AUV USBL Sensor at AUV s nose Data communication USBL Sensor at Docking Station


















13 3. Mine Disposal Vehicle To develop a vehicle for mine disposal at a extreme environment with high tidal current and high turbidity - Automatic installation of ECP/CAP - Precise navigation with IMU/APS - Surveillance Sonar & ID Sonar Positioning L=3.5m D=.55m Automatic Homing Automatic Target Approaching Identification Sonar (multi-beam, max. 65m) Max Depth : 4m Max Range : 2 km Condition : Sea State 4 Max Speed > 7knots Op. Time : 7knots Navigation & Surveillance Sonar (max. 2m)





14 3. Operation Mode Controller Cable Winch Optic Cable Or Coaxial Cable Cable comm. mode RF buoy test RF buoy comm. mode




15 3. Field Test of the MDV Test for operation time at max speed Multi-beam Sonar Field test for max speed and maneuvering performance of the MDV


 Self-propelled")
16 4. Self-propelled mining robot Major functions required by a self-propelled mining robot Swift mobility on soft and cohesive seafloor Environment-friendly pick-up of nodules Disposing of nodules through flexible Real-time operating system Integrated control of dynamic behaviors Ore carrier Hyperbaric resistance of structure and equipments Validation through pilot-scale tests Continuous mining & off-loading operation Lifting pump Mining vessel Discharge pipe Tailing discharge Lifting pipe Flexible pipe Buffer Active positioning(option) Self-propelled miner
, 15kW(electric) Hybrid Pick-up: hydraulic + mechanical Tracked Vehicle Contact Pressure: 5.")
17 4. A Self-propelled Test Miner, MineRo Mining Capacity: 8.6t/h Weight: 9.6ton(air), 4.6ton(water) Size: 5m(L) x 4m(W) x 3m(H) Power: 3.3kVA, 135kW(hydraulic), 15kW(electric) Hybrid Pick-up: hydraulic + mechanical Tracked Vehicle Contact Pressure: 5.6kPa(mean) Thrusters: heading control Underwater Hydraulic: pressure compensated RTOS: PXI embedded controller Cable: umbilical(single mode) LARS (Launch & Recovery System) Developed and applied design technologies SBD: real-time simulation of miner vehicle, flexible and buffer, lifting pipe MDO: optimum energy consumption design satisfying constraints (mining rate & safety)












18 4. Mining performance test in shallow water( 9) Preparation of artificial nodules Launching of MineRo Underwater scenes Recovery of artificial nodules Real-time operation from Control VAN
![4. Seafloor driving performance & control test ( 1) Turning radius North[M] SR - Turning Radius (Vel:.5, SR:1.2, Left-turn) -3-4 -5-6 8 9 1 11 12 13 East[M] North[M] SR - Turning Radius (Vel:.5, SR:1.5, Left-turn) -3-35 -4-45 35 4 45 5 55 6 East[M] Slip at steering Slip.](/docs-images/78/76833743/images/19-4.jpg "25.2.15.1.5 -.5 Slip of Track (Vel :.5, SR : 1.2) Slip of Inner Track Slip of Outer Track -.1 8 85 9 95 1 Time [sec] Slip.3.25.2.15.1.5 Slip of Track (Vel :.5, SR : 1.2) Slip of Outer Track Slip of Inner Track -.")
19 4. Seafloor driving performance & control test ( 1) Turning radius North[M] SR - Turning Radius (Vel:.5, SR:1.2, Left-turn) East[M] North[M] SR - Turning Radius (Vel:.5, SR:1.5, Left-turn) East[M] Slip at steering Slip Slip of Track (Vel :.5, SR : 1.2) Slip of Inner Track Slip of Outer Track Time [sec] Slip Slip of Track (Vel :.5, SR : 1.2) Slip of Outer Track Slip of Inner Track Time [sec] North[m] Path Kalman USBL SR - Turning Radius (Vel:.5, SR:1.5, Right-turn) 16 SR - Turning Radius (Vel:.5, SR:2., Left-turn) Slip of Track (Vel :.3, SR : 1.8).4 Slip of Track (Vel :.3, SR : 1.8) -3 North[M] East[M] North[M] East[M] Slip Slip of Inner Track Slip of Outer Track Time [sec] Slip Slip of Outer Track Slip of Inner Track Time [sec] East[m] Localization : EKF North[m] Localization USBL pre-filter Kalman East[m] North[minutes] Total Path East[minutes]

20 5. Underwater Acoustic Network(UA-Net) Gateway Central Control Center Mobile end - node Development of underwater acoustic communication network system for remote control and oceanographic monitoring - Transmission Speed : Upto 9,6 bps - Distance between nodes : Upto 1 km - Transmission Delay : less than 1 sec Working Robot Node Fixed end- node Research Topics - Underwater channel modeling and channel emulator implementation - Development of underwater acoustic modem - Underwater network and protocol design and implementation - Underwater-ocean-internet interworking network design Fund : 6 million $ from the Korean government Period :

")



 Directional sensor 29")
, 1kg")








21 5. Underwater Acoustic Modem km Integrated Modem Bi-directional Modem(27) range/ speed characteri stic 9.7km / 1kbps Dedicated Tx and Rx sensors Directional sensor 28 Long range one-directional modem range/ speed charact eristic 16km / 5kbps Long-range Tx (12.5kHz) Directional sensor 29 size range/ speed charac teristic φ18 x 44 (mm), 1kg 3km / 1kbps All-in-one type km 1km One-directional Modem range/ speed Characteri stic 7.4km / 1kbps Dedicated Tx and Rx sensors Directional sensor 27 Bi-directional Modem range/ speed charac teristic 6km / 1kbps Omni-sensor Small size 28 range/ speed charac teristic Network Modem 3km / 1kbps DC power Omni-sensor 29 size range/ speed Integrated Modem φ14 x 34 (mm), 5.9kg 3km / 1kbps charac teristic Smaller size and weight










22 5. Underwater Network Protocol Design Underwater Network Protocol Implement Underwater Network Protocol Underwater network protocol algorithm Underwater network protocol GUI Underwater Experiment: Routing path determination + data transfer Experimental setup GUI Experiment Results


23 Future Works Survey on cold seeping and hydrothermal vent with Hemire ROV & Henuvy depressor Development of a high speed AUV to survey high tidal current areas Development of a deep-sea AUV ISIMI6 for oceanographic applications To complete the navy acceptance tests for the MDV Mining performance test in deep water with the selfpropelled mining robot MineRo (at the East Sea, 2,m depth) Development of a multi-legged seabed robot recently launched project for survey and operation on sea floor and subsea structures Improvement on the underwater acoustic modem and the underwater mobile network system for shortrange and long-range communication ISIMI6 Walking-flying hybrid vehicle
24
KYSTDESIGN SUPPORTER Work Class ROV
 KYSTDESIGN SUPPORTER Work Class ROV Heavy duty work class ROV 150 Hp HPU 3000 m depth rated Through frame lift capacity of 3 t Top hat TMS with 500 m tether capacity Interface prepared for advanced survey
KYSTDESIGN SUPPORTER Work Class ROV Heavy duty work class ROV 150 Hp HPU 3000 m depth rated Through frame lift capacity of 3 t Top hat TMS with 500 m tether capacity Interface prepared for advanced survey
UNDERWATER SOLUTIONS WORLDWIDE
 UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
DeepOcean Superior ROV
 DeepOcean Superior ROV combining high speed acoustic surveys and visual inspection Subops Haugesund 5 th August 2015 - Making a difference Company snapshot Vessels ROVs Trenchers & Ploughs Owned: 7 Long
DeepOcean Superior ROV combining high speed acoustic surveys and visual inspection Subops Haugesund 5 th August 2015 - Making a difference Company snapshot Vessels ROVs Trenchers & Ploughs Owned: 7 Long
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
ISSUE Construction and ROV Professionals Q2 / A Breakthrough in Hybrid Underwater Vehicles. The ECA Mine Counter Measure System
 8. A Breakthrough in Hybrid Underwater Vehicles 25. The ECA Mine Counter Measure System 31. The SeaTrepid Story 34. The Evolution of Single Beam Sonars for ROVs 11 The magazine of choice for Subsea ISSUE
8. A Breakthrough in Hybrid Underwater Vehicles 25. The ECA Mine Counter Measure System 31. The SeaTrepid Story 34. The Evolution of Single Beam Sonars for ROVs 11 The magazine of choice for Subsea ISSUE
Marine robots in environmental surveys:
 Le Quartz Center, Brest, France Marine robots in environmental surveys: current developments at andrea.caiti@unipi.it Università di Pisa Dipartimento di Ingegneria dell informazione & Centro E. Piaggio
Le Quartz Center, Brest, France Marine robots in environmental surveys: current developments at andrea.caiti@unipi.it Università di Pisa Dipartimento di Ingegneria dell informazione & Centro E. Piaggio
SeaRobotics Facility. Integrated Facility for the Design and Build and Test. Location. Facility. Test Capability
 1 SeaRobotics Facility Location Located in Stuart, Florida 26 miles north of Riviera Beach ¼ mile from I-95 Facility 1400 square meters in Treasure Coast Commerce Park 400 m2, Engineering, Integration
1 SeaRobotics Facility Location Located in Stuart, Florida 26 miles north of Riviera Beach ¼ mile from I-95 Facility 1400 square meters in Treasure Coast Commerce Park 400 m2, Engineering, Integration
VLVnT Installation and Maintenance of the submarine network
 VLVnT Installation and Maintenance of submarine network The Maintenance aspect present some difficult as ir cost is very v high. For this reason it s important: Redundancy where possible Reliability prevision
VLVnT Installation and Maintenance of submarine network The Maintenance aspect present some difficult as ir cost is very v high. For this reason it s important: Redundancy where possible Reliability prevision
VR to DL for UUST. lfremer
 VR to DL for UUST 1 operational tech testbed 1980 EPAULARD 1985 NAUTILE SIRENE - AUV «autonomous landing» 1998 VICTOR 6000 SWIMMER - AUV «autonomous docking» 2001 ALIVE-AUV «autonomous intervention» 2003
VR to DL for UUST 1 operational tech testbed 1980 EPAULARD 1985 NAUTILE SIRENE - AUV «autonomous landing» 1998 VICTOR 6000 SWIMMER - AUV «autonomous docking» 2001 ALIVE-AUV «autonomous intervention» 2003
CLV SIA. Vessel Specification. M-Tech Offshore Torskekaj Esbjerg, Denmark
 Vessel Specification DP-2 CABLE LAYING VESSEL CONFIGURED FOR SUBSEA POWER CABLE INSTALLATIONS AND INTER-ARRAY LINKS The CLV SIA is acquired by M-Tech Offshore A/S, a Danish Company equally owned by NT
Vessel Specification DP-2 CABLE LAYING VESSEL CONFIGURED FOR SUBSEA POWER CABLE INSTALLATIONS AND INTER-ARRAY LINKS The CLV SIA is acquired by M-Tech Offshore A/S, a Danish Company equally owned by NT
Robot mobili e tecnologie marine del centro ISME. Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università di Firenze nodo ISME
 Robot mobili e tecnologie marine del centro ISME Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università di Firenze nodo ISME NATIONAL INTER-UNIVERSITY CENTER TO SUPPORT RESEARCH ACTIVITIES
Robot mobili e tecnologie marine del centro ISME Alessandro Ridolfi Dipartimento di Ingegneria Industriale Università di Firenze nodo ISME NATIONAL INTER-UNIVERSITY CENTER TO SUPPORT RESEARCH ACTIVITIES
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Hydrographic society
 Hydrographic society We Design, Build and Operate Unmanned Marine Systems Make a disruptive, revolutionary change to working at sea: - Reduce costs - Improve operational flexibility - Reduce risk to human
Hydrographic society We Design, Build and Operate Unmanned Marine Systems Make a disruptive, revolutionary change to working at sea: - Reduce costs - Improve operational flexibility - Reduce risk to human
1 of 5 4/19/11 2:15 PM
 Top Page > About JAMSTEC > Research Vessels, Facilities and Equipment > Research Vessels and Vehicles > URASHIMA Research, Development and Promotion Research Vessels, Facilities and Equipment Research
Top Page > About JAMSTEC > Research Vessels, Facilities and Equipment > Research Vessels and Vehicles > URASHIMA Research, Development and Promotion Research Vessels, Facilities and Equipment Research
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination
: An Autonomous Vessel for Data Acquisition and Dissemination") Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
Remote Explorer (REx IV): An Autonomous Vessel for Data Acquisition and Dissemination AUV Lab @ MIT Sea Grant Alon Yaari, Michael Sacarny, Michael DeFilippo, Husayn Karimi, Paris Perdikaris MOOS-DAWG 2015
Design of SPARUS II AUV
 Design of SPARUS II AUV Underwater Robotics Research Centre (CIRS) Computer Vision and Robotics Institute Universitat de Girona, 17003, Girona, Spain. web: http://cirs.udg.edu Contact person: Marc Carreras
Design of SPARUS II AUV Underwater Robotics Research Centre (CIRS) Computer Vision and Robotics Institute Universitat de Girona, 17003, Girona, Spain. web: http://cirs.udg.edu Contact person: Marc Carreras
SEAEYE COUGAR-XT COMPACT
 SEAEYE COUGAR-XT COMPACT SEAEYE COUGAR-XT COMPACT The Seaeye Cougar-XT Compact is the shallow water compact version of the field proven and extremely powerful Cougar-XT. Proven worldwide and recognised
SEAEYE COUGAR-XT COMPACT SEAEYE COUGAR-XT COMPACT The Seaeye Cougar-XT Compact is the shallow water compact version of the field proven and extremely powerful Cougar-XT. Proven worldwide and recognised
Underwater Remotely Operated Vehicles (ROV) Drive & Dive Motion Solutions
 Drive & Dive Motion Solutions") Underwater Remotely Operated Vehicles (ROV) Drive & Dive Motion Solutions Deep sea exploration - where motion matters Elmo s motion solutions are ideal for the ever advancing world of underwater remotely
Underwater Remotely Operated Vehicles (ROV) Drive & Dive Motion Solutions Deep sea exploration - where motion matters Elmo s motion solutions are ideal for the ever advancing world of underwater remotely
Sabertooth A Hybrid AUV/ROV offshore system. Jan Siesjö Chief Engineer
 Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
Sabertooth A Hybrid AUV/ROV offshore system Jan Siesjö Chief Engineer jan.siesjo@saabgroup.com SAAB WORLDWIDE Employees 2010 Sweden 10,372 South Africa 1,086 Australia 349 USA 194 Great Britain 117 Finland
Materials First use of high performance ceramics for full ocean depth floatation. HROV will be the first project to exploit high strength ceramic tech
 11,000 Meter HROV Development Program and its Relation to Oceanographic and Commercial Undersea Use February 2006 Andy Bowen, Dr. Dana Yoerger, (Woods Hole Oceanographic Institution), Dr. Louis Whitcomb
11,000 Meter HROV Development Program and its Relation to Oceanographic and Commercial Undersea Use February 2006 Andy Bowen, Dr. Dana Yoerger, (Woods Hole Oceanographic Institution), Dr. Louis Whitcomb
Yulia Zarayskaya Rochelle Wigley
 for the On behalf of the GEBCO-NF Alumni Team Yulia Zarayskaya geozar@yandex.ru Geological Institute RAS Rochelle Wigley rochelle@ccom.unh.edu Center for Coastal and Ocean Mapping Non-profit organization
for the On behalf of the GEBCO-NF Alumni Team Yulia Zarayskaya geozar@yandex.ru Geological Institute RAS Rochelle Wigley rochelle@ccom.unh.edu Center for Coastal and Ocean Mapping Non-profit organization
Ocean Class AGOR Acquisition Update. UNOLS Council June 6, Harvard University
 Ocean Class AGOR Acquisition Update UNOLS Council June 6, 2012 Harvard University Ocean Class AGOR Shipyard: Dakota Creek Industries Anacortes, WA Design Agent Guido Perla & Associates Seattle, WA 1 1
Ocean Class AGOR Acquisition Update UNOLS Council June 6, 2012 Harvard University Ocean Class AGOR Shipyard: Dakota Creek Industries Anacortes, WA Design Agent Guido Perla & Associates Seattle, WA 1 1
Wave Energy for Powering Science. VIMS Industry Partnership Meeting. February 17, 2012
 Wave Energy for Powering Science VIMS Industry Partnership Meeting February 17, 2012 Company Overview Commenced Operations: 1994 Incorporation: Delaware, USA Operating Locations: Pennington, NJ, USA and
Wave Energy for Powering Science VIMS Industry Partnership Meeting February 17, 2012 Company Overview Commenced Operations: 1994 Incorporation: Delaware, USA Operating Locations: Pennington, NJ, USA and
SEAEYE COUGAR-XT THE VEHICLE SEAEYE COUGAR-XT
 SEAEYE COUGAR-XT The Seaeye Cougar-XT is a compact, highly flexible and extremely powerful electric ROV with working depths of 2000 metres. Proven worldwide and recognised for its capability, operators
SEAEYE COUGAR-XT The Seaeye Cougar-XT is a compact, highly flexible and extremely powerful electric ROV with working depths of 2000 metres. Proven worldwide and recognised for its capability, operators
In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various
 25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
25 6 18 In recent years, multirotor helicopter type autonomous UAVs are being used for aerial photography and aerial survey. In addition, various applications such as buildings maintenance, security and
work class ROV- Inspire your future
 work class ROV- Inspire your future Leading ROV producer KYSTDESIGN is one of the leading ROV producers in the world today. KYSTDESIGN consists of multi-discipline engineering teams, with specialists in
work class ROV- Inspire your future Leading ROV producer KYSTDESIGN is one of the leading ROV producers in the world today. KYSTDESIGN consists of multi-discipline engineering teams, with specialists in
Driving the road to greater productivity through automation
 Peter Terwiesch Chief Technology Officer ABB Automation Technologies Driving the road to greater productivity through automation ABB Group - 1 - The ABB Automation Technologies landscape Process Automation
Peter Terwiesch Chief Technology Officer ABB Automation Technologies Driving the road to greater productivity through automation ABB Group - 1 - The ABB Automation Technologies landscape Process Automation
Star Tower. Why Aerostats Star Tower: Applications Summary. Description Performance Features Payload. Product CARAVAN INTERNATIONAL CORPORATION
 AEROSTATS CARAVAN INTERNATIONAL CORPORATION Star Tower Why Aerostats Star Tower: Product Description Performance Features Payload Applications Summary Why Our Aerostats Provide persistent wide-area coverage
AEROSTATS CARAVAN INTERNATIONAL CORPORATION Star Tower Why Aerostats Star Tower: Product Description Performance Features Payload Applications Summary Why Our Aerostats Provide persistent wide-area coverage
Hydro Lek Ltd. Press Information. HyBIS providing a versatile and cost effective platform for deep ocean operations
 Hydro Lek Ltd Press Information April 2013 HyBIS providing a versatile and cost effective platform for deep ocean operations HyBIS is a simple, cost effective and highly versatile, manoeuvrable underwater
Hydro Lek Ltd Press Information April 2013 HyBIS providing a versatile and cost effective platform for deep ocean operations HyBIS is a simple, cost effective and highly versatile, manoeuvrable underwater
More Tools in the Toolbox: The Naval Oceanographic Office s Remote Environmental Monitoring UnitS (REMUS) 6000 AUV
 6000 AUV") More Tools in the Toolbox: The Naval Oceanographic Office s Remote Environmental Monitoring UnitS (REMUS) 6000 AUV Kenneth M. Sharp and Randy H. White Naval Oceanographic Office Ocean Projects Department
More Tools in the Toolbox: The Naval Oceanographic Office s Remote Environmental Monitoring UnitS (REMUS) 6000 AUV Kenneth M. Sharp and Randy H. White Naval Oceanographic Office Ocean Projects Department
Mine Warfare Trends. 10 May 2011
 Mine Warfare Trends 10 May 2011 SUMMARY OF MINING EVENTS (1980 PRESENT) 50-60 VESSELS SUNK OR DAMAGED MAJORITY IN SRI LANKA MANY ARMED CONTACT MINES ADRIFT PERSIAN GULF > 20 LIVES LOST AT-SEA & ASHORE
Mine Warfare Trends 10 May 2011 SUMMARY OF MINING EVENTS (1980 PRESENT) 50-60 VESSELS SUNK OR DAMAGED MAJORITY IN SRI LANKA MANY ARMED CONTACT MINES ADRIFT PERSIAN GULF > 20 LIVES LOST AT-SEA & ASHORE
COMANCHE Small Work ROV System
 COMANCHE Small Work ROV System Our Comanche Work-Class electric ROV benefits from enhanced capabilities provided by a powerful control system, proportional workclass manipulator arms, tooling hydraulic
COMANCHE Small Work ROV System Our Comanche Work-Class electric ROV benefits from enhanced capabilities provided by a powerful control system, proportional workclass manipulator arms, tooling hydraulic
Kongsberg Maritime. Green Ship paper at Mari-Tech 2010 Montreal 11 June WORLD CLASS through people, technology and dedication
 Kongsberg Maritime Green Ship paper at Mari-Tech 2010 Montreal 11 June 2010 www.kongsberg.com WORLD CLASS through people, technology and dedication Kongsberg Gruppen Year 2009 Revenue US$2,300,000,000
Kongsberg Maritime Green Ship paper at Mari-Tech 2010 Montreal 11 June 2010 www.kongsberg.com WORLD CLASS through people, technology and dedication Kongsberg Gruppen Year 2009 Revenue US$2,300,000,000
SURVEYOR-H. Technical Data. Max speed 120 km/h. Engine power 7.2 hp. Powerplant Modified Zenoah G29E. Fuel tank volume 3.6 l
 rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
rev. 28.10.14 * features & specifications are subject to change without notice. Technical Data Max speed 120 km/h Engine power 7.2 hp Powerplant Modified Zenoah G29E Fuel tank volume 3.6 l Payload with
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
AUTONOMOUS UNDERWATER VEHICLE DESIGNED TO BE USED IN ANTISUBMARINE WARFARE
 AUTONOMOUS UNDERWATER VEHICLE DESIGNED TO BE USED IN ANTISUBMARINE WARFARE Vasile DOBREF 1 Octavian TĂRĂBUŢĂ 2 Cătălin CLINCI 3 1 Captain, Assoc. Professor PhD, Mircea cel Batran Naval Academy, Constanta,
AUTONOMOUS UNDERWATER VEHICLE DESIGNED TO BE USED IN ANTISUBMARINE WARFARE Vasile DOBREF 1 Octavian TĂRĂBUŢĂ 2 Cătălin CLINCI 3 1 Captain, Assoc. Professor PhD, Mircea cel Batran Naval Academy, Constanta,
Aerial robots that interact with the environment
 Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
Engtek SubSea Systems
 Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte Ltd SubSea Propulsion Technology SubSea AUV/ROV Propulsion Systems The enclosed data, information, description, photos and illustrations
Engtek SubSea Systems A Division of Engtek Manoeuvra Systems Pte Ltd SubSea Propulsion Technology SubSea AUV/ROV Propulsion Systems The enclosed data, information, description, photos and illustrations
Unmanned Surface Vessels - Opportunities and Technology
 Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
Polarconference 2016 DTU 1-2 Nov 2016 Unmanned Surface Vessels - Opportunities and Technology Mogens Blanke DTU Professor of Automation and Control, DTU-Elektro Adjunct Professor at AMOS Center of Excellence,
anzan Robotic Club MATE International ROV Competition 2013, Explorer Class Team Members
 anzan Robotic Club MATE International ROV Competition 2013, Explorer Class Team Members Soheil Kiani Electrical Designer Seyed Milad Fayazi Mechanical Designer Peyman Shirmardi Managing Director &Electronic
anzan Robotic Club MATE International ROV Competition 2013, Explorer Class Team Members Soheil Kiani Electrical Designer Seyed Milad Fayazi Mechanical Designer Peyman Shirmardi Managing Director &Electronic
Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics: Results and Roadmaps
 National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
National Technical University of Athens Mechanical Engineering Department Control Systems Laboratory http://csl-ep.mech.ntua.gr Spinning-in of Terrestrial Microsystems and Technologies to Space Robotics:
Development: Server Vehicle Rendezvous
 United States Out-of-Water Test Methods to Accelerate Implementation of Autonomous Rendezvous in the NPS ARIES AUV CAPT J.W. Nicholson, Ph.D. United States Development: Server Vehicle Rendezvous 350 300
United States Out-of-Water Test Methods to Accelerate Implementation of Autonomous Rendezvous in the NPS ARIES AUV CAPT J.W. Nicholson, Ph.D. United States Development: Server Vehicle Rendezvous 350 300
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
Critical Design Report Presentation. Triton. Team 11 February 28, Department of Electrical and Computer Engineering
 Critical Design Report Presentation Triton Team 11 February 28, 2017 Introduction No economical solution for extended underwater monitoring Ecologists from UMass Amherst interested in studying spawning
Critical Design Report Presentation Triton Team 11 February 28, 2017 Introduction No economical solution for extended underwater monitoring Ecologists from UMass Amherst interested in studying spawning
Design and Simulation of New Versions of Tube Launched UAV
 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
ZT-USB Series User Manual
 ZT-USB Series User Manual Warranty Warning Copyright All products manufactured by ICP DAS are under warranty regarding defective materials for a period of one year, beginning from the date of delivery
ZT-USB Series User Manual Warranty Warning Copyright All products manufactured by ICP DAS are under warranty regarding defective materials for a period of one year, beginning from the date of delivery
Towed Streamer Positioning System
 Towed Streamer Positioning System Performance Data s towed streamer positioning system reduces the positional uncertainty for the entire towed streamer array by integrating horizontal and vertical streamer
Towed Streamer Positioning System Performance Data s towed streamer positioning system reduces the positional uncertainty for the entire towed streamer array by integrating horizontal and vertical streamer
Design: Aker OSCV 06L DSV Built: 2009 IMO No: Call sign: C6XW3 SKANDI ARCTIC DSV
 Design: Aker OSCV 06L DSV Built: 009 IMO No: 94138 Call sign: C6XW3 SKANDI ARCTIC DSV IMO No 94138 The vessel is designed as a vessel for world wide operations Low resistance hull lines designed for speed
Design: Aker OSCV 06L DSV Built: 009 IMO No: 94138 Call sign: C6XW3 SKANDI ARCTIC DSV IMO No 94138 The vessel is designed as a vessel for world wide operations Low resistance hull lines designed for speed
Marine Robotics. Alfredo Martins. Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016
 Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Multiple autonomous vehicles at sea 2 Multiple coordinated
Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Multiple autonomous vehicles at sea 2 Multiple coordinated
BY HOEYCOMB AEROSPACE TECHNOLOGIES. HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV
 BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
for the On behalf of the GEBCO-NF Alumni Team Jaya Roperez Modified presentation of Dr Rochelle Wigley
 for the On behalf of the GEBCO-NF Alumni Team Jaya Roperez Modified presentation of Dr Rochelle Wigley The inspiration to enter as a team for the challenge: Opening speech by Mr Sasakawa Argued for ongoing
for the On behalf of the GEBCO-NF Alumni Team Jaya Roperez Modified presentation of Dr Rochelle Wigley The inspiration to enter as a team for the challenge: Opening speech by Mr Sasakawa Argued for ongoing
Preliminary Design Report. Project Title: Lunabot
 EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 30 January 2012 Project Title: Lunabot Team Name: UF Lunabotics Team Members: Name: Matt Morgan Name: UF Lunabotics Team
EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 30 January 2012 Project Title: Lunabot Team Name: UF Lunabotics Team Members: Name: Matt Morgan Name: UF Lunabotics Team
A Hybrid AUV Design for Shallow Water Reef Navigation
 Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 A Hybrid AUV Design for Shallow Water Reef Navigation Matthew Dunbabin, Jonathan Roberts, Kane
Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005 A Hybrid AUV Design for Shallow Water Reef Navigation Matthew Dunbabin, Jonathan Roberts, Kane
Status & evolutions of Telemetry Services for Profiling Floats. Brice Robert Patrick Bradley (CLS America)
") Status & evolutions of Telemetry Services for Profiling Floats Brice Robert brobert@cls.fr Patrick Bradley (CLS America) pbradley@clsamerica.fr COMPANY PROFILE CLS is a subsidiary of the French Space Agency
Status & evolutions of Telemetry Services for Profiling Floats Brice Robert brobert@cls.fr Patrick Bradley (CLS America) pbradley@clsamerica.fr COMPANY PROFILE CLS is a subsidiary of the French Space Agency
The new generation pipeline surveys
 The new generation pipeline surveys MMT Founded in 1976 Offices in Gothenburg, Sweden & Banbury, UK 250 + staff 7 Survey & ROV vessels Reach Subsea AS Founded 2008 Office in Haugesund 65 + staff 6 WROVs
The new generation pipeline surveys MMT Founded in 1976 Offices in Gothenburg, Sweden & Banbury, UK 250 + staff 7 Survey & ROV vessels Reach Subsea AS Founded 2008 Office in Haugesund 65 + staff 6 WROVs
Design and Development of the UTSA Unmanned Aerial System ACE 1
 Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Design and Navigation of Flying Robots
 Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Design and Navigation of Flying Robots Roland Siegwart, ETH Zurich www.asl.ethz.ch Drones: From Technology to Policy, Security to Ethics 30 January 2015, ETH Zurich Roland Siegwart 06.11.2014 1 ASL ETH
Fred. Olsen POWER GENERATION AT SEA. Autonomous Sea Power «POWER AND GATEWAY SUBSEA» Fred.Olsen Ltd.
 Author: Even Hjetland even.hjetland@fredolsen.no Date: Sept. 5th 2017 Revision: Type: O For email/download «POWER AND GATEWAY SUBSEA» Fred. Olsen Autonomous Sea Power POWER GENERATION AT SEA POWER SUPPLY
Author: Even Hjetland even.hjetland@fredolsen.no Date: Sept. 5th 2017 Revision: Type: O For email/download «POWER AND GATEWAY SUBSEA» Fred. Olsen Autonomous Sea Power POWER GENERATION AT SEA POWER SUPPLY
Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer. James Hailstones, ASV, Ltd.
 Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer James Hailstones, ASV, Ltd. Introduction Company ~70 employees worldwide. ASV established in 2010. ASV operations in USA
Autonomous / Unmanned Surface Vehicles And The Increased Efficiencies They Offer James Hailstones, ASV, Ltd. Introduction Company ~70 employees worldwide. ASV established in 2010. ASV operations in USA
Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket
 AIAA ADS Conference 2011 in Dublin 1 Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki
AIAA ADS Conference 2011 in Dublin 1 Reentry Demonstration Plan of Flare-type Membrane Aeroshell for Atmospheric Entry Vehicle using a Sounding Rocket Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki
1. AEROSTAT INTRODUCTION
 1. AEROSTAT INTRODUCTION The tethered aerostat, also known as a blimp or kite balloon, has been in use since the early 19 th Century for a variety of observation purposes. The use of aerostats for signal
1. AEROSTAT INTRODUCTION The tethered aerostat, also known as a blimp or kite balloon, has been in use since the early 19 th Century for a variety of observation purposes. The use of aerostats for signal
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Autonomous Navigation For each of the following aspects, especially concerning the team s approach to scenariospecific challenges,
CETUS - EOD Robotic Work Package
 CETUS - EOD Robotic Work Package Christopher K. DeBolt Naval Explosive Ordnance Disposal Technology Division (NAVEODTECHDIV) Code 50A29 2008 Stump Neck Road Indian Head, MD 20640-5070 phone: (301) 744-6850
CETUS - EOD Robotic Work Package Christopher K. DeBolt Naval Explosive Ordnance Disposal Technology Division (NAVEODTECHDIV) Code 50A29 2008 Stump Neck Road Indian Head, MD 20640-5070 phone: (301) 744-6850
The 38M Aerostat: A New System for Surveillance
 AIAA 5th Aviation, Technology, Integration, and Operations Conference (ATIO) 26-28 September 2005, Arlington, Virginia AIAA 2005-7443 The 38M Aerostat: A New System for Surveillance John A. Krausman *
AIAA 5th Aviation, Technology, Integration, and Operations Conference (ATIO) 26-28 September 2005, Arlington, Virginia AIAA 2005-7443 The 38M Aerostat: A New System for Surveillance John A. Krausman *
Underwater Acoustics. History and latest technology. Science and Geopolitcs of Himmalaya- Arctic- Antarctic. Tonny Algroey, Kongsberg Maritime
 Underwater Acoustics History and latest technology Science and Geopolitcs of Himmalaya- Arctic- Antarctic Tonny Algroey, Kongsberg Maritime Agenda Introduction to KONGSBERG Underwater acoustics what is
Underwater Acoustics History and latest technology Science and Geopolitcs of Himmalaya- Arctic- Antarctic Tonny Algroey, Kongsberg Maritime Agenda Introduction to KONGSBERG Underwater acoustics what is
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition
 Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Autonomous Quadrotor for the 2014 International Aerial Robotics Competition Yongseng Ng, Keekiat Chua, Chengkhoon Tan, Weixiong Shi, Chautiong Yeo, Yunfa Hon Temasek Polytechnic, Singapore ABSTRACT This
Innovating the future of disaster relief
 Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
Technical Robustness and Quality
 Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
UAV Research at Georgia Tech
 UAV Research at Georgia Tech Eric N. Johnson Lockheed Martin Assistant Professor of Avionics Integration, Georgia Tech School of Aerospace Engineering Presentation at TU Delft June 3, 2002 June 2002 ENJ
UAV Research at Georgia Tech Eric N. Johnson Lockheed Martin Assistant Professor of Avionics Integration, Georgia Tech School of Aerospace Engineering Presentation at TU Delft June 3, 2002 June 2002 ENJ
Ocean Class AGOR Program Acquisition Status 11 February 2013
 Program Acquisition Status 11 February 2013 Prepared For: RVTEC Mr. Christopher MacDonald Assistant PM PMS325Q9 Mr. Tim Schnoor ONR 321RF Mr. Mike Prince ONR 321RF Key Characteristics: Hull Material Length
Program Acquisition Status 11 February 2013 Prepared For: RVTEC Mr. Christopher MacDonald Assistant PM PMS325Q9 Mr. Tim Schnoor ONR 321RF Mr. Mike Prince ONR 321RF Key Characteristics: Hull Material Length
SEAEYE PANTHER-XT THE VEHICLE SEAEYE PANTHER-XT
 SEAEYE PANTHER-XT The customisable Seaeye Panther-XT is designed as the benchmark for electric work ROVs and challenges heavier and more costly hydraulic vehicles, particularly where deck space is at a
SEAEYE PANTHER-XT The customisable Seaeye Panther-XT is designed as the benchmark for electric work ROVs and challenges heavier and more costly hydraulic vehicles, particularly where deck space is at a
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
THE APPLICATION OF A MODULAR AUV TO COASTAL OCEANOGRAPHY: CASE STUDY ON THE OCEAN EXPLORER
 THE APPLICATION OF A MODULAR AUV TO COASTAL OCEANOGRAPHY: CASE STUDY ON THE OCEAN EXPLORER Samuel M. Smith, Stanley E. Dunn, Thomas L. Hopkins, K. Heeb, and T. Pantelakis *Florida Atlantic University Ocean
THE APPLICATION OF A MODULAR AUV TO COASTAL OCEANOGRAPHY: CASE STUDY ON THE OCEAN EXPLORER Samuel M. Smith, Stanley E. Dunn, Thomas L. Hopkins, K. Heeb, and T. Pantelakis *Florida Atlantic University Ocean
R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS
 Automation Solutions R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS COMPACT MULTI-AXIS INDUSTRIAL ROBOTS FOR COMPLEX PROCESSING TASKS Reduce Manufacturing Costs Improve Production Time Increase Throughput Engineering
Automation Solutions R-SERIES MULTI-AXIS INDUSTRIAL ROBOTS COMPACT MULTI-AXIS INDUSTRIAL ROBOTS FOR COMPLEX PROCESSING TASKS Reduce Manufacturing Costs Improve Production Time Increase Throughput Engineering
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
NAU Robosub. Project Proposal
 NAU Robosub Project Proposal Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko December 09, 2015 Bethany Overview Introduction
NAU Robosub Project Proposal Mansour Alajemi, Feras Aldawsari, Curtis Green, Daniel Heaton, Wenkai Ren, William Ritchie, Bethany Sprinkle, Daniel Tkachenko December 09, 2015 Bethany Overview Introduction
DARPA S Autonomous Minehunting and Mapping Technologies (AMMT) Program An Overview
 Program An Overview") DARPA S Autonomous Minehunting and Mapping Technologies (AMMT) Program An Overview Joseph G. Paglia William F. Wyman C. S. Draper Laboratory, Inc. 555 Technology Square Cambridge, MA 02 139 Abstract -
DARPA S Autonomous Minehunting and Mapping Technologies (AMMT) Program An Overview Joseph G. Paglia William F. Wyman C. S. Draper Laboratory, Inc. 555 Technology Square Cambridge, MA 02 139 Abstract -
Long Endurance Testing of a REMUS Docking Station, Duplicate Copies and Off- Site Support - An Expansion of N C-0278
 Long Endurance Testing of a REMUS Docking Station, Duplicate Copies and Off- Site Support - An Expansion of N00014-02-C-0278 Thomas Austin Woods Hole Oceanographic Institution Bigelow Lab 303 MS # 10 Woods
Long Endurance Testing of a REMUS Docking Station, Duplicate Copies and Off- Site Support - An Expansion of N00014-02-C-0278 Thomas Austin Woods Hole Oceanographic Institution Bigelow Lab 303 MS # 10 Woods
The Mine of the Future Current Mine Automation Trends
 The Mine of the Future Current Mine Automation Trends Dr. G. Baiden Canadian Research Chair Robotics and Mine Automation Laurentian University Chairman and CTO Penguin Automated Systems Inc. Future Possibilities
The Mine of the Future Current Mine Automation Trends Dr. G. Baiden Canadian Research Chair Robotics and Mine Automation Laurentian University Chairman and CTO Penguin Automated Systems Inc. Future Possibilities
SurfROVer: An ROV for Littoral Zone Survey Work
 XXX-X-XXXX-XXXX-X/XX/$XX.00 20XX IEEE SurfROVer: An ROV for Littoral Zone Survey Work Timothy Crandle PhD tcrandle@seaviewsystems.com Matthew Cook Geoffrey Cook Edward Celkis Abstract Powered umbilical
XXX-X-XXXX-XXXX-X/XX/$XX.00 20XX IEEE SurfROVer: An ROV for Littoral Zone Survey Work Timothy Crandle PhD tcrandle@seaviewsystems.com Matthew Cook Geoffrey Cook Edward Celkis Abstract Powered umbilical
Fred. Olsen POWER GENERATION AT SEA. Autonomous Sea Power. Fred.Olsen Ltd.
 Author: Even Hjetland even.hjetland@fredolsen.no Date: Dec. 12th 2017 Revision: Type: Q For email/download Fred. Olsen Autonomous Sea Power POWER GENERATION AT SEA POWER SUPPLY AND COMMUNICATION PLATFORM
Author: Even Hjetland even.hjetland@fredolsen.no Date: Dec. 12th 2017 Revision: Type: Q For email/download Fred. Olsen Autonomous Sea Power POWER GENERATION AT SEA POWER SUPPLY AND COMMUNICATION PLATFORM
AT-10 Electric/HF Hybrid VTOL UAS
 AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
EchoBoat-G2- RCV / ASV
 EchoBoat-G2- RCV / ASV A quick start guide/user manual. Page 1 EchoBoat-G2-RCV / ASV A quick start guide/user manual. Table of Contents Page 1.0 Introduction... 3 2.0 EchoBoat Safety and Cautions... 3
EchoBoat-G2- RCV / ASV A quick start guide/user manual. Page 1 EchoBoat-G2-RCV / ASV A quick start guide/user manual. Table of Contents Page 1.0 Introduction... 3 2.0 EchoBoat Safety and Cautions... 3
DAY 2 Breakouts II and III. POWER CABLE Day 2
 POWER CABLE DAY 2 Breakouts II and III Assumptions Offshore Less than 20 miles Water depth 1,200 m or less Floating Moored Cable and termination design depends on dynamics and azimuth constraints on platform
POWER CABLE DAY 2 Breakouts II and III Assumptions Offshore Less than 20 miles Water depth 1,200 m or less Floating Moored Cable and termination design depends on dynamics and azimuth constraints on platform
Hydrography Integrated Systems and Platforms
 Kongsberg Maritime Subsea Hydrography Integrated Systems and Platforms 15 th MACHC Meeting, Manzanillo, Mexico, 11 th to 13 th December 2014. Jan Haug Kristensen Regional Manager Americas Subsea Sales
Kongsberg Maritime Subsea Hydrography Integrated Systems and Platforms 15 th MACHC Meeting, Manzanillo, Mexico, 11 th to 13 th December 2014. Jan Haug Kristensen Regional Manager Americas Subsea Sales
Ocean Class AGOR. Baseline and Priorities Mission Equipment Specification (MES) 13 October 2010
 13 October 2010") Ocean Class AGOR Baseline and Priorities Mission Equipment Specification (MES) 13 October 2010 Baseline MES Strategy Ocean Class AGOR designs are being developed based on the MES contract attachment. This
Ocean Class AGOR Baseline and Priorities Mission Equipment Specification (MES) 13 October 2010 Baseline MES Strategy Ocean Class AGOR designs are being developed based on the MES contract attachment. This
SmartAtlantic. The Benefits of Real-time Metocean Data in Port Operations. Chad MacIsaac Sales Director AXYS Technologies Inc.
 SmartAtlantic The Benefits of Real-time Metocean Data in Port Operations October 22, 2015 Chad MacIsaac Sales Director AXYS Technologies Inc. Agenda The SmartAtlantic Buoy Network Buoy System Data Management
SmartAtlantic The Benefits of Real-time Metocean Data in Port Operations October 22, 2015 Chad MacIsaac Sales Director AXYS Technologies Inc. Agenda The SmartAtlantic Buoy Network Buoy System Data Management
Autonomous inverted helicopter flight via reinforcement learning
 Autonomous inverted helicopter flight via reinforcement learning Andrew Y. Ng, Adam Coates, Mark Diel, Varun Ganapathi, Jamie Schulte, Ben Tse, Eric Berger, and Eric Liang By Varun Grover Outline! Helicopter
Autonomous inverted helicopter flight via reinforcement learning Andrew Y. Ng, Adam Coates, Mark Diel, Varun Ganapathi, Jamie Schulte, Ben Tse, Eric Berger, and Eric Liang By Varun Grover Outline! Helicopter
Prototyping Collision Avoidance for suas
 Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
WORLD CLASS through people, technology and dedication. KONGSBERG September 20,
 WORLD CLASS through people, technology and dedication KONGSBERG September 20, 2006 1 Kongsberg Maritime Offshore & Merchant Marine Focusing on core technologies building strong application knowledge sales
WORLD CLASS through people, technology and dedication KONGSBERG September 20, 2006 1 Kongsberg Maritime Offshore & Merchant Marine Focusing on core technologies building strong application knowledge sales
Ocean Energy Development in Korea
 Ocean Energy Development in Korea 2017. 11. 13. Kwang Soo Lee kslee@kiost.ac.kr Coastal Engineering Research Division Korea Institute of Ocean Science and Technology (KIOST) 2018-02-20 1 1 Ocean Energy
Ocean Energy Development in Korea 2017. 11. 13. Kwang Soo Lee kslee@kiost.ac.kr Coastal Engineering Research Division Korea Institute of Ocean Science and Technology (KIOST) 2018-02-20 1 1 Ocean Energy
The Riptide µuuv. Dr. Dani Goldberg MOOS-DAWG, Aug 2017
 The Riptide µuuv Dr. Dani Goldberg MOOS-DAWG, Aug 2017 Who We Are Started in January 2015 Principals Jeffrey Smith CEO 20+ years Defense, 10+ years in UUVs John Vestri COO/CFO 8 years in ROVs Dr. Dani
The Riptide µuuv Dr. Dani Goldberg MOOS-DAWG, Aug 2017 Who We Are Started in January 2015 Principals Jeffrey Smith CEO 20+ years Defense, 10+ years in UUVs John Vestri COO/CFO 8 years in ROVs Dr. Dani
Space Robotics Planetary Exploration - a DLR Perspective
 Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
Space Robotics Planetary Exploration - a DLR Perspective Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt (DLR) (German Aerospace Center) Robotics and Mechatronics Center (RMC) AirTec - SpaceWorld,
AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport
: Developing Automated Driving Pilots for IoT: Brainport") AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport 31 May 2018 16.00-17.00 CET 31/05/2018 This project has received funding from the European Union s Horizon 2020 research
AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport 31 May 2018 16.00-17.00 CET 31/05/2018 This project has received funding from the European Union s Horizon 2020 research
There are several limitations to autonomous. The REx. (mt notes) MIT Sea Grant s autonomous vessel for data acquisition and dissemination
 MIT Sea Grant s autonomous vessel for data acquisition and dissemination") (mt notes) REx IV deployed on the Charles River in Boston, MA. The REx MIT Sea Grant s autonomous vessel for data acquisition and dissemination BY MICHAEL DEFILIPPO There are several limitations to autonomous
(mt notes) REx IV deployed on the Charles River in Boston, MA. The REx MIT Sea Grant s autonomous vessel for data acquisition and dissemination BY MICHAEL DEFILIPPO There are several limitations to autonomous
DEVELOPMENT OF A FUTURE MARINE ENERGY SYSTEM: MODEL CENTRIC APPROACH
 DEVELOPMENT OF A FUTURE MARINE ENERGY SYSTEM: MODEL CENTRIC APPROACH SMM, Hamburg, 5 September 2018 Kevin Koosup Yum Content Growing complexity Main concepts for Model-Centric Design, What and How? Relataed
DEVELOPMENT OF A FUTURE MARINE ENERGY SYSTEM: MODEL CENTRIC APPROACH SMM, Hamburg, 5 September 2018 Kevin Koosup Yum Content Growing complexity Main concepts for Model-Centric Design, What and How? Relataed
100+ MILLION EUROS OF TURNOVER 600+ EMPLOYEES 80% OF TURNOVER ACHIEVED ABROAD 20% OF TURNOVER REINVESTED EACH YEAR IN R&D. ixblue at a glance
 MOTION SIMULATORS ixblue stands as a global leader in the design and manufacturing of innovative solutions for navigation, positioning and acoustic imaging markets. The French Group offers its unique advanced
MOTION SIMULATORS ixblue stands as a global leader in the design and manufacturing of innovative solutions for navigation, positioning and acoustic imaging markets. The French Group offers its unique advanced
HyDrone and EchoBoat for Autonomous Hydrographic Surveying
 John Tamplin President Seafloor Systems, Inc. JANUARY 15, 2017 HyDrone and EchoBoat for Autonomous Hydrographic Surveying Introduction HyDrone and EchoBoat USV s Partnership Formed to Provide a Solution
John Tamplin President Seafloor Systems, Inc. JANUARY 15, 2017 HyDrone and EchoBoat for Autonomous Hydrographic Surveying Introduction HyDrone and EchoBoat USV s Partnership Formed to Provide a Solution
Autonomous Ships E-NAVIGATION UNDERWAY November 7, William Westmoreland Adrian Paruas
 E-NAVIGATION UNDERWAY 2018 Autonomous Ships November 7, 2018 William Westmoreland Adrian Paruas KONGSBERG PROPRIETARY: This document contains KONGSBERG information which is proprietary and c onfidential.
E-NAVIGATION UNDERWAY 2018 Autonomous Ships November 7, 2018 William Westmoreland Adrian Paruas KONGSBERG PROPRIETARY: This document contains KONGSBERG information which is proprietary and c onfidential.
23083 Hwy. 190E P.O. Box 898 Robert, LA USA Phone: (985) Expanded Description of Rope/Riser Crawler
 Expanded Description of Rope/Riser Crawler") 23083 Hwy. 190E P.O. Box 898 Robert, LA 70455 USA Phone: (985)350-6299 e-mail: info@seatrepid.com Expanded Description of Rope/Riser Crawler ABSTRACT A semi-autonomous [tetherless] or tele-operated [tethered]
23083 Hwy. 190E P.O. Box 898 Robert, LA 70455 USA Phone: (985)350-6299 e-mail: info@seatrepid.com Expanded Description of Rope/Riser Crawler ABSTRACT A semi-autonomous [tetherless] or tele-operated [tethered]