Actuators in robotics
|
|
|
- Avis Todd
- 6 years ago
- Views:
Transcription
1 Actuators in robotics Overview Václav Hlaváč Czech Technical University Czech Institute of Informatics, Robotics, and Cybernetics Prague 6, Jugoslavských partyzánů 1580/3 Czech Republic Courtesy to several authors of presentations on the web. 1
2 What is an actuator in robotics? A mechanical device for actively moving or driving something. Source of movement (drive), taxonomy: Electric drive (motor). Hydraulic drive. Pneumatic drive. Internal combustion, hybrids. Miscellaneous: ion thruster, thermal shape memory effect, artificial muscles, etc. 2
3 Outline of the lecture Servomechanism. Electrical motor. Hydraulic drive. Pneumatic drive. Miscellaneous: Artificial muscles. 3




4 Servomechanism Mechanism exploring feedback to deliver number of revolutions, position, etc. The controlled quantity is mechanical. Desired value Signal Processing & Amplification Mechanism Electric Hydraulic Pneumatic Final Actuation Element Actuator Sensor 4
5 Properties of a servo High maximum torque/force allows high (de)acceleration. Can be source of torque. High zero speed torque/force. High bandwidth provides accurate and fast control. Works in all four quadrants Robustness. 5

6 Rotary shaft encoder 6
7 Classification of Electric Motors Electric motors Alternating Current (AC) motors Direct Current (DC) motors Asynchronous induction Synchronous Separately excited Self Excited Permanent magnet Polyphase Single phase Series Compound Shunt Sinusoidal Brushless DC Stepper... Another 7

8 DC motors Field pole North pole and south pole Receive electricity to form magnetic field Armature (Direct Industry, 1995) Cylinder between the poles Electromagnet when current goes through Linked to drive shaft to drive the load Commutator Overturns current direction in armature 8

9 How does a DC motor work? 9
10 DC motors, cont. Speed control without impact power supply quality Changing armature voltage Changing field current Restricted use Few low/medium speed applications Clean, non-hazardous areas Expensive compared to AC motors 10

11 DC motor, a view inside Simple, cheap. Easy to control. 1W - 1kW Can be overloaded. Brushes wear. Limited overloading on high speeds. 11
12 DC motor control Controller + H-bridge (allows motor to be driven in both directions). Pulse Width Modulation (PWM)-control. Speed control by controlling motor current=torque. Efficient small components. PID control. 12
13 DC motor modeling U I τ,ω Voltage and Current In Heat out Q Torque and Speed Out Power In = Power Out UI UI = Q +τω 2 I R +τω 13

14 DC motor, shunt Separately excited DC motor: field current supplied from a separate force Self-excited DC motor: shunt motor Field winding parallel with armature winding Current = field current + armature current (Rodwell Int. Corporation, 1999) Speed constant independent of load up to certain torque Speed control: insert resistance in armature or field current 14

15 DC motor: series motor Self-excited DC motor: series motor Suited for high starting torque: cranes, hoists Field winding in series with armature winding Field current = armature current Speed restricted to 5000 RPM Avoid running with no load: speed uncontrolled (Rodwell Int. Corporation, 1999) 15

16 DC compound motor Suited for high starting torque if high % compounding: cranes, hoists Field winding in series and parallel with armature winding Good torque and stable speed Higher % compound in series = high starting torque 16

17 Digital control of DC motors 17

18 AC motor Electrical current reverses direction Two parts: stator and rotor Stator: stationary electrical component Rotor: rotates the motor shaft Speed difficult to control because it depends on current frequency Two types Synchronous motor Induction motor 18


19 AC motor inventor Nikola Tesla 19
20 AC synchronous motors Constant speed fixed by system frequency DC for excitation and low starting torque: suited for low load applications Can improve power factor: suited for high electricity use systems Synchronous speed (Ns): Ns = 120 f / P f = supply frequency P = number of poles 20
21 AC induction motor, components Rotor Squirrel cage: conducting bars in parallel slots Wound rotor: 3-phase, double-layer, distributed winding Stator Stampings with slots to carry 3-phase windings Wound for definite number of poles 21
22 How induction motors work? Electricity supplied to the stator. Magnetic field generated that moves around rotor. Current induced in rotor. Rotor produces second magnetic field that opposes stator magnetic field. Rotor begins to rotate. Electromagnetics Stator Rotor 22

23 AC induction motor, a view inside 23
24 AC induction motors, properties Disadvantages: About 7x overload current at start. Needs a frequency changer for control. Advantages: Simple design, cheap Easy to maintain Direct connection to AC power source Advantages (cont): Self-starting. 0,5kW 500kW. High power to weight ratio High efficiency: 50 95% 24
25 Induction motor, speed and slip Motor never runs at synchronous speed but lower base speed The difference is slip Install slip ring to avoid this Calculate % slip: % Slip = Ns Nb x 100 Ns Ns = synchronous speed in RPM Nb = base speed in RPM 25
26 AC Induction motor load, speed, torque relationship At start: high current and low pull-up torque At 80% of full speed: highest pullout torque and current drops At full speed: torque and stator current are zero 26


27 Delta star Y Inter-phase (L-L) voltage 400 V. The inrush current can be too large ( 7 times the nominal current). Phase-ground (L-N) voltage 230 V. Y starting reduces the inrush current. Courtesy: Ivo Novák, images 27
28 Single phase induction motor One stator winding. Single-phase power supply. Squirrel cage rotor. Use several tricks to start, then transition to an induction motor behavior. Up to 3 kw applications. Household appliances: fans, washing machines, dryers, airconditioners. Lower efficiency: % Often low starting torque. 28
29 Single-phase induction motor Three-phase motors produce a rotating magnetic field. When only single-phase power is available, the rotating magnetic field must be produced using other means. Two methods to create the rotating magnetic field are usually used: 1. Shaded-pole motor. 2. Split-phase motor. 29

30 Ad 1. Shaded-pole motor A small squirrel-cage motor with an auxiliary winding composed of a copper ring or bar. Current induced in this coil induce a 2 nd phase of magnetic flux. Phase angle is small only a small starting torque compared to torque at full speed. Used in small appliances as electric fans, drain pumps of a washing machine, dishwashers. Main winding Aux winding 30
31 Ad 2. Split-phase motor (1) Has a startup winding separate from the main winding. Fewer turns of smaller wire than the main winding, so it has a lower inductance (L) and higher resistance (R). The lower L/R ratio creates a small phase shift, not more than about 30 degrees. At start, the startup winding is connected to the power source via a centrifugal switch, which is closed at low speed. The starting direction of rotation is given by the order of the connections of the startup winding relative to the running winding. 31
32 Ad 2. Split-phase motor (2) Once the motor reaches near operating speed, the centrifugal switch opens, disconnecting the startup winding from the power source. The motor then operates solely on the main winding. The purpose of disconnecting the startup winding is to eliminate the energy loss due to its high resistance. Commonly used in major appliances such as air conditioners and clothes dryers. 32
 than a split-phase motor.")
33 Ad 2. Split-phase motor (3) A capacitor start motor is a split-phase induction motor with a starting capacitor inserted in series with the startup winding. An LC circuit produces a greater phase shift (and so, a much greater starting torque) than a split-phase motor. 33


34 Voice coil motor The name comes form the original use in loudspeakers. Either moving coil or moving magnet. Used for proportional or tight servomechanisms, where the speed is of importance. E.g. in a computer disc drive, gimbal or other oscillatory applications. 34

35 Linear electric motors There are some true linear magnetic drives. BEI-Kimco voice coils: Up to 30 cm travel 100 lbf > 10 g acceleration 2.5 kg weight 500 Hz corner frequency. Used for precision vibration control. 35

36 Tubular linear motor 36

37 37



38 Stepper Motors A sequence of (3 or more) poles is activated in turn, moving the stator in small steps. Very low speed / high angular precision is possible without reduction gearing by using many rotor teeth. Can also perform a microstep by activating both coils at once. 38
39 Driving stepper motors Signals to the stepper motor are binary, on-off values (not PWM). In principle easy: activate poles as A B C D A or A D C B A Steps are fixed size, so no need to sense the angle! (open loop control). In practice, acceleration and possibly jerk must be bounded, otherwise motor will not keep up and will start missing steps (causing position errors). Driver electronics must simulate inertia of the motor. 39
40 40
41 41
42 42
43 43
44 Stepper Motor Selection Permanent Magnet / Variable Reluctance Unipolar vs. Bipolar Number of Stacks Number of Phases Degrees Per Step Microstepping Pull-In/Pull-Out Torque Detent Torque 44
 is a")



45 Brushless DC electric motor A brushless DC motor (BLDC) is a permanent magnet synchronous electric motor. Position and speed sensor, usually Hall-effect sensor, needed for electronic control. Video explaining the principle. Electric bike motor 45
46 Hydraulic actuators Linear movement. Big forces without gears. Actuators are simple. Used often in mobile machines. Bad efficiency. Motor, pump, actuator combination is lighter than motor, generator, battery, motor & gear combination. 46



47 Hydraulic actuators, examples 47



48 Hydraulic pump (1) Gear pump Lowest efficiency 90 % Rotary vane pump Mid-pressure 180 bars External teeth Internal teeth 48

49 Hydraulic pump (2) Archimedes screw pump Bent axis pump 49

")
50 Hydraulic pump (3) Axial piston pumps, swashplate principle Radial piston pump High pressure ( 650 bar) Small flows. 50

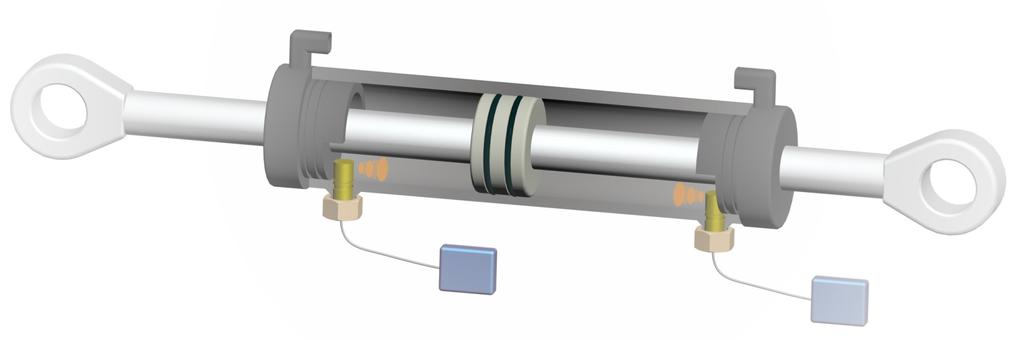
51 Hydraulic cylinder 51
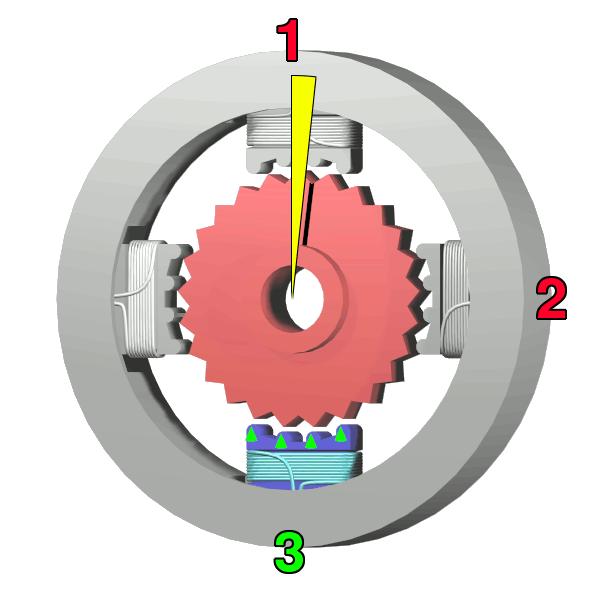
52 Vane motor

53 Gear motor 53


54 Semi-rotary piston motor 300 degrees 180 degrees Large torque at low speed. Doubles the torque. 54

55 Radial piston motor High starting torque 55
56 Real hydraulic motor 56
57 Pneumatic actuators Like hydraulic except power from compressed air. Advantages: Fast on/off type tasks. Big forces with elasticity. No hydraulic oil leak problems. Disadvantage: Speed control is not possible because the air pressure depends on many variables that are out of control. 57
58 Other Actuators Piezoelectric. Magnetic. Ultrasound. Shape Memory Alloys (SMA). Inertial. 58




59 Examples 59

60 Muscles Muscles contract when activated. Muscles are also attached to bones on two sides of a joint. The longitudinal shortening produces joint rotation. Bilateral motion requires pairs of muscles attached on opposite sides of a joint are required. 60

61 Muscles inside Muscles consist of long slender cells (fibres), each of which is a bundle of finer fibrils. Within each fibril are relatively thick filaments of the protein myosin and thin ones of actin and other proteins. Tension in active muscles is produced by cross bridges 61

62 Artificial muscles, properties Mechanical properties: elastic modulus, tensile strength, stressstrain, fatigue life, thermal and electrical conductivity. Thermodynamic issues: efficiency, power and force density, power limits. Packaging: power supply/delivery, device construction, manufacturing, control, integration. 62
63 Artificial muscles, technology 1 1. Traditional mechatronic muscles, e.g. pneumatic. 2. Shape memory alloys, e.g. NiTi. 3. Chemical polymers - gels (Jello, vitreous humor) 1000-fold volume change ~ temp, ph, electric fields. Force up to 100 N/cm μm fiber 1 Hz, 1 cm fiber 1 cycle/2.5 days. 4. Electro active polymers Store electrons in large molecules. Deformation ~ (voltage) 2. Change length of chemical bonds. 63
64 Artificial muscles, technology 2 5. Biological Muscle Proteins Actin and myosin mm/sec in a petri dish. 6. Fullerenes and Nanotubes Graphitic carbon. High elastic modulus large displacements, large forces. Macro-, micro-, and nano-scale Potentially superior to biological muscle. 64

65 Pneumatic artificial muscle Called also McKibben muscle. In development since 1950s. Contractile or extensional devices operated by pressurized air filling a pneumatic bladder. Very lightweight, based on a thin membrane. Current top implementation: Shadow hand. 65
 developed artificial muscles for control of leg movements in a biped walking robot.")
66 Artificial Muscles: McKibben Type (Brooks, 1977) developed an artificial muscle for control of the arms of the humanoid torso Cog. (Pratt and Williamson 1995) developed artificial muscles for control of leg movements in a biped walking robot. 66
67 Shape memory alloys 1 Nickel Titanium Nitinol. Crystalographic phase transformation from Martesite to Austenite. Contract 5-7% of length when heated times greater effect than thermal expansion. Relatively high forces. About 1 Hz. Structural fatigue a failure mode caused by which cyclic loading which results in catastrophic fraction. 67

68 Robot Lobster, an example A robot lobster developed at Northeastern University used SMAs very cleverly The force levels required for the lobster s legs are not excessive for SMAs Because the robot is used underwater cooling is supplied naturally by seawater More on the robot lobster is available at: 68
69 Artificial Muscles: Electroactive Polymers Like SMAs, Electroactive Polymers (EAPs) also hange their shape when electrically stimulated The advantages of EAPs for robotics are that they are able to emulate biological muscles with a high degree of toughness, large actuation strain, and inherent vibration damping Unfortunately, the force actuation and mechanical energy density of EAPs are relatively low 69

70 Electroactive Polymer Example Robotic face developed by a group led by David Hanson. More information is available at: 70
Unit 34 Single-Phase Motors
 Unit 34 Single-Phase Motors Objectives: Unit 34 Single-Phase Motors List the different types of split-phase motors. Discuss the operation of split-phase motors. Reverse the direction of rotation of a splitphase
Unit 34 Single-Phase Motors Objectives: Unit 34 Single-Phase Motors List the different types of split-phase motors. Discuss the operation of split-phase motors. Reverse the direction of rotation of a splitphase
Note 8. Electric Actuators
 Note 8 Electric Actuators Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 1 1. Introduction In a typical closed-loop, or feedback, control
Note 8 Electric Actuators Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 1 1. Introduction In a typical closed-loop, or feedback, control
SECTION 4 ELECTRIC MOTORS UNIT 17: TYPES OF ELECTRIC MOTORS UNIT OBJECTIVES UNIT OBJECTIVES 3/21/2012
 SECTION 4 ELECTRIC MOTORS UNIT 17: TYPES OF ELECTRIC MOTORS UNIT OBJECTIVES After studying this unit, the reader should be able to Describe the different types of open single-phase motors used to drive
SECTION 4 ELECTRIC MOTORS UNIT 17: TYPES OF ELECTRIC MOTORS UNIT OBJECTIVES After studying this unit, the reader should be able to Describe the different types of open single-phase motors used to drive
AC Motors vs DC Motors. DC Motors. DC Motor Classification ... Prof. Dr. M. Zahurul Haq
 AC Motors vs DC Motors DC Motors Prof. Dr. M. Zahurul Haq http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of Engineering & Technology ME 6401: Advanced Mechatronics
AC Motors vs DC Motors DC Motors Prof. Dr. M. Zahurul Haq http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of Engineering & Technology ME 6401: Advanced Mechatronics
CHAPTER THREE DC MOTOR OVERVIEW AND MATHEMATICAL MODEL
 CHAPTER THREE DC MOTOR OVERVIEW AND MATHEMATICAL MODEL 3.1 Introduction Almost every mechanical movement that we see around us is accomplished by an electric motor. Electric machines are a means of converting
CHAPTER THREE DC MOTOR OVERVIEW AND MATHEMATICAL MODEL 3.1 Introduction Almost every mechanical movement that we see around us is accomplished by an electric motor. Electric machines are a means of converting
 APGENCO/APTRANSCO Assistant Engineer Electrical Previous Question Papers Q.1 The two windings of a transformer is conductively linked. inductively linked. not linked at all. electrically linked. Q.2 A
APGENCO/APTRANSCO Assistant Engineer Electrical Previous Question Papers Q.1 The two windings of a transformer is conductively linked. inductively linked. not linked at all. electrically linked. Q.2 A
Actuators are the muscles of robots.
 6.1 INTRODUCTION Actuators are the muscles of robots. Several types of actuator noteworthy? Electric motors? Servomotors? Stepper motors? Direct-drive electric motors? Hydraulic actuators? Pneumatic actuators?
6.1 INTRODUCTION Actuators are the muscles of robots. Several types of actuator noteworthy? Electric motors? Servomotors? Stepper motors? Direct-drive electric motors? Hydraulic actuators? Pneumatic actuators?
Application Note : Comparative Motor Technologies
 Application Note : Comparative Motor Technologies Air Motor and Cylinders Air Actuators use compressed air to move a piston for linear motion or turn a turbine for rotary motion. Responsiveness, speed
Application Note : Comparative Motor Technologies Air Motor and Cylinders Air Actuators use compressed air to move a piston for linear motion or turn a turbine for rotary motion. Responsiveness, speed
Electrical Machines -II
 Objective Type Questions: 1. Basically induction machine was invented by (a) Thomas Alva Edison (b) Fleming (c) Nikola Tesla (d) Michel Faraday Electrical Machines -II 2. What will be the amplitude and
Objective Type Questions: 1. Basically induction machine was invented by (a) Thomas Alva Edison (b) Fleming (c) Nikola Tesla (d) Michel Faraday Electrical Machines -II 2. What will be the amplitude and
Special-Purpose Electric Machines
 Special-Purpose Electric Machines The machines introduced in this lecture are used in many applications requiring fractional horsepower, or the ability to accurately control position, velocity or torque.
Special-Purpose Electric Machines The machines introduced in this lecture are used in many applications requiring fractional horsepower, or the ability to accurately control position, velocity or torque.
MANTECH ELECTRONICS. Stepper Motors. Basics on Stepper Motors I. STEPPER MOTOR SYSTEMS OVERVIEW 2. STEPPING MOTORS
 MANTECH ELECTRONICS Stepper Motors Basics on Stepper Motors I. STEPPER MOTOR SYSTEMS OVERVIEW 2. STEPPING MOTORS TYPES OF STEPPING MOTORS 1. VARIABLE RELUCTANCE 2. PERMANENT MAGNET 3. HYBRID MOTOR WINDINGS
MANTECH ELECTRONICS Stepper Motors Basics on Stepper Motors I. STEPPER MOTOR SYSTEMS OVERVIEW 2. STEPPING MOTORS TYPES OF STEPPING MOTORS 1. VARIABLE RELUCTANCE 2. PERMANENT MAGNET 3. HYBRID MOTOR WINDINGS
Schedule of Events. Mech 1751: Introduction to Mechatronics. What is an actuator? Electric Actuators and Drives. Actuators. Dr. Stefan B.
 Schedule of Events Week Date Content Assignment Notes Mech 1751: Introduction to Mechatronics Actuators 1 2 3 4 5 6 7 8 9 09/3 16/3 23/3 30/3 6/4 20/4 27/4 4/5 11/5 Introduction Design Process System Modelling
Schedule of Events Week Date Content Assignment Notes Mech 1751: Introduction to Mechatronics Actuators 1 2 3 4 5 6 7 8 9 09/3 16/3 23/3 30/3 6/4 20/4 27/4 4/5 11/5 Introduction Design Process System Modelling
Motor Basics AGSM 325 Motors vs Engines
 Motor Basics AGSM 325 Motors vs Engines Motors convert electrical energy to mechanical energy. Engines convert chemical energy to mechanical energy. 1 Motors Advantages Low Initial Cost - $/Hp Simple &
Motor Basics AGSM 325 Motors vs Engines Motors convert electrical energy to mechanical energy. Engines convert chemical energy to mechanical energy. 1 Motors Advantages Low Initial Cost - $/Hp Simple &
Lectures on Mechanics. Lesson#1
 Lectures on Mechanics Lesson#1 Francesco.becchi@telerobot.it LESSONS TIME TABLE (pls. take note) 28/11 h9/12- mech components 1 (3h) 4/12 h9/12 mech components 2 (3h) 11/12 h9/12 mech technologies (3h)
Lectures on Mechanics Lesson#1 Francesco.becchi@telerobot.it LESSONS TIME TABLE (pls. take note) 28/11 h9/12- mech components 1 (3h) 4/12 h9/12 mech components 2 (3h) 11/12 h9/12 mech technologies (3h)
DEPARTMENT OF EI ELECTRICAL MACHINE ASSIGNMENT 1
 It is the mark of an educated mind to be able to entertain a thought without accepting it. DEPARTMENT OF EI ELECTRICAL MACHINE ASSIGNMENT 1 1. Explain the Basic concepts of rotating machine. 2. With help
It is the mark of an educated mind to be able to entertain a thought without accepting it. DEPARTMENT OF EI ELECTRICAL MACHINE ASSIGNMENT 1 1. Explain the Basic concepts of rotating machine. 2. With help
COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK SUBJECT CODE & NAME : EE 1001 SPECIAL ELECTRICAL MACHINES
 KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK SUBJECT CODE & NAME : EE 1001 SPECIAL ELECTRICAL MACHINES YEAR / SEM : IV / VII UNIT I SYNCHRONOUS RELUCTANCE
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK SUBJECT CODE & NAME : EE 1001 SPECIAL ELECTRICAL MACHINES YEAR / SEM : IV / VII UNIT I SYNCHRONOUS RELUCTANCE
Electric Machines I 2017 Shiraz University of Technology Dr. A. Rahideh
 In The Name of God The Most Compassionate, The Most Merciful Electric Machines I Table of Contents 1. Introduction to Electric Machines 2. Electromagnetic Circuits 3. Principle of Electromechanical Energy
In The Name of God The Most Compassionate, The Most Merciful Electric Machines I Table of Contents 1. Introduction to Electric Machines 2. Electromagnetic Circuits 3. Principle of Electromechanical Energy
QUESTION BANK SPECIAL ELECTRICAL MACHINES
 SEVENTH SEMESTER EEE QUESTION BANK SPECIAL ELECTRICAL MACHINES TWO MARK QUESTIONS 1. What is a synchronous reluctance 2. What are the types of rotor in synchronous reluctance 3. Mention some applications
SEVENTH SEMESTER EEE QUESTION BANK SPECIAL ELECTRICAL MACHINES TWO MARK QUESTIONS 1. What is a synchronous reluctance 2. What are the types of rotor in synchronous reluctance 3. Mention some applications
Most home and business appliances operate on single-phase AC power. For this reason, singlephase AC motors are in widespread use.
 Chapter 5 Most home and business appliances operate on single-phase AC power. For this reason, singlephase AC motors are in widespread use. A single-phase induction motor is larger in size, for the same
Chapter 5 Most home and business appliances operate on single-phase AC power. For this reason, singlephase AC motors are in widespread use. A single-phase induction motor is larger in size, for the same
EE6351 ELECTRIC DRIVES AND CONTROL UNIT-1 INTRODUTION
 EE6351 ELECTRIC DRIVES AND CONTROL UNIT-1 INTRODUTION 1. What is meant by drive and electric drive? Machines employed for motion control are called drives and may employ any one of the prime movers for
EE6351 ELECTRIC DRIVES AND CONTROL UNIT-1 INTRODUTION 1. What is meant by drive and electric drive? Machines employed for motion control are called drives and may employ any one of the prime movers for
ELECTRIC MACHINES EUROLAB 0.3 kw
 index SINGLE-PHASE MOTORS SPLIT-PHASE MOTOR DL 30130 CAPACITOR MOTOR DL 30140 UNIVERSAL MOTOR DL 30150 REPULSION MOTOR DL 30170 THREE PHASE ASYNCHRONOUS MOTORS SQUIRREL CAGE THREE PHASE ASYNCHRONOUS MOTOR
index SINGLE-PHASE MOTORS SPLIT-PHASE MOTOR DL 30130 CAPACITOR MOTOR DL 30140 UNIVERSAL MOTOR DL 30150 REPULSION MOTOR DL 30170 THREE PHASE ASYNCHRONOUS MOTORS SQUIRREL CAGE THREE PHASE ASYNCHRONOUS MOTOR
Electric Motors. Presentation from the Energy Efficiency Guide for Industry in Asia
 Electric Motors Presentation from the Energy Efficiency Guide for Industry in Asia www.energyefficiencyasia.org Adapted by Prof Elisete Ternes Pereira To the UNIVERSITY OF NIZWA ١ Electric Motors Introduction
Electric Motors Presentation from the Energy Efficiency Guide for Industry in Asia www.energyefficiencyasia.org Adapted by Prof Elisete Ternes Pereira To the UNIVERSITY OF NIZWA ١ Electric Motors Introduction
Page 1. Design meeting 18/03/2008. By Mohamed KOUJILI
 Page 1 Design meeting 18/03/2008 By Mohamed KOUJILI I. INTRODUCTION II. III. IV. CONSTRUCTION AND OPERATING PRINCIPLE 1. Stator 2. Rotor 3. Hall sensor 4. Theory of operation TORQUE/SPEED CHARACTERISTICS
Page 1 Design meeting 18/03/2008 By Mohamed KOUJILI I. INTRODUCTION II. III. IV. CONSTRUCTION AND OPERATING PRINCIPLE 1. Stator 2. Rotor 3. Hall sensor 4. Theory of operation TORQUE/SPEED CHARACTERISTICS
1.1 Block Diagram of Drive Components of Electric Drive & their functions. Power Processor / Modulator. Control. Unit
 Introduction Motion control is required in large number of industrial and domestic applications like transportations, rolling mills, textile machines, fans, paper machines, pumps, washing machines, robots
Introduction Motion control is required in large number of industrial and domestic applications like transportations, rolling mills, textile machines, fans, paper machines, pumps, washing machines, robots
The Wound-Rotor Induction Motor Part I
 Experiment 1 The Wound-Rotor Induction Motor Part I OBJECTIVE To examine the construction of the three-phase wound-rotor induction motor. To understand exciting current, synchronous speed and slip in a
Experiment 1 The Wound-Rotor Induction Motor Part I OBJECTIVE To examine the construction of the three-phase wound-rotor induction motor. To understand exciting current, synchronous speed and slip in a
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 4: Actuators Part 1 Chapter 3, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation and Control, The
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 4: Actuators Part 1 Chapter 3, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation and Control, The
2014 ELECTRICAL TECHNOLOGY
 SET - 1 II B. Tech I Semester Regular Examinations, March 2014 ELECTRICAL TECHNOLOGY (Com. to ECE, EIE, BME) Time: 3 hours Max. Marks: 75 Answer any FIVE Questions All Questions carry Equal Marks ~~~~~~~~~~~~~~~~~~~~~~~~~~
SET - 1 II B. Tech I Semester Regular Examinations, March 2014 ELECTRICAL TECHNOLOGY (Com. to ECE, EIE, BME) Time: 3 hours Max. Marks: 75 Answer any FIVE Questions All Questions carry Equal Marks ~~~~~~~~~~~~~~~~~~~~~~~~~~
Industrial Motors. But first..servos!
 Industrial Motors DC Motors AC Motors Three Phase Motors Specialty Motors Stepper Motors But first..servos! Servos can be AC or DC but they do one thing: Sense the output position and adjust the input
Industrial Motors DC Motors AC Motors Three Phase Motors Specialty Motors Stepper Motors But first..servos! Servos can be AC or DC but they do one thing: Sense the output position and adjust the input
Contents. Review of Electric Circuitd. Preface ;
 Preface ; Chapter 1 Review of Electric Circuitd 1.1 Introduction, 1 1.2 Direct Circuit Current, 1 1.2.1 Voltage, 3 1.2.2 Power, 3 1.2.3 Ohm's Law, 5 1.2.4 KirchhofTs Laws, 5 1.2.4.1 Kirchhoff s Current
Preface ; Chapter 1 Review of Electric Circuitd 1.1 Introduction, 1 1.2 Direct Circuit Current, 1 1.2.1 Voltage, 3 1.2.2 Power, 3 1.2.3 Ohm's Law, 5 1.2.4 KirchhofTs Laws, 5 1.2.4.1 Kirchhoff s Current
EXPERIMENT 2 THREE PHASE INDUCTION MOTOR, PART 1
 University f Jordan School of Engineering Department of Mechatronics Engineering Electrical Machines Lab Eng. Osama Fuad Eng. Nazmi Ashour EXPERIMENT 2 THREE PHASE INDUCTION MOTOR, PART 1 OBJECTIVES To
University f Jordan School of Engineering Department of Mechatronics Engineering Electrical Machines Lab Eng. Osama Fuad Eng. Nazmi Ashour EXPERIMENT 2 THREE PHASE INDUCTION MOTOR, PART 1 OBJECTIVES To
Pretest Module 21 Units 1-3 AC Generators & Three-Phase Motors
 Pretest Module 21 Units 1-3 AC Generators & Three-Phase Motors 1. What are the two main parts of a three-phase 2. Which part of a three-phase squirrel-cage induction motor is a hollow core? 3. What are
Pretest Module 21 Units 1-3 AC Generators & Three-Phase Motors 1. What are the two main parts of a three-phase 2. Which part of a three-phase squirrel-cage induction motor is a hollow core? 3. What are
Pretest Module 21 Unit 4 Single-Phase Motors
 Pretest Module 21 Unit 4 Single-Phase Motors 1. What are the four main components of a single-phase motor? Rotor, stator, centrifugal switch, end bells and bearings 2. How is a rotating field created in
Pretest Module 21 Unit 4 Single-Phase Motors 1. What are the four main components of a single-phase motor? Rotor, stator, centrifugal switch, end bells and bearings 2. How is a rotating field created in
Prepared By: Ahmad Firdaus Bin Ahmad Zaidi
 Prepared By: Ahmad Firdaus Bin Ahmad Zaidi A stepper motor is an electromechanical device which converts electrical pulses into discrete mechanical rotational movements. Stepper motor mainly used when
Prepared By: Ahmad Firdaus Bin Ahmad Zaidi A stepper motor is an electromechanical device which converts electrical pulses into discrete mechanical rotational movements. Stepper motor mainly used when
Uncommon actuators in Robotic. Lukas Kopecny Brno University of Technology Czech Republic
 Uncommon actuators in Robotic Lukas Kopecny Brno University of Technology Czech Republic Why uncomon actuators? Common actuators Rigid Bulky (gearboxes) Problematic interaction Expensive Heavy Uncommon
Uncommon actuators in Robotic Lukas Kopecny Brno University of Technology Czech Republic Why uncomon actuators? Common actuators Rigid Bulky (gearboxes) Problematic interaction Expensive Heavy Uncommon
9/7/2010. Chapter , The McGraw-Hill Companies, Inc. MOTOR CLASSIFICATION. 2010, The McGraw-Hill Companies, Inc.
 Chapter 2 MOTOR CLASSIFICATION 1 In general, motors are classified according to the type of power used (AC or DC) and the motor's principle of operation. AC DC Motor Family Tree 2 DC MOTOR CONNECTIONS
Chapter 2 MOTOR CLASSIFICATION 1 In general, motors are classified according to the type of power used (AC or DC) and the motor's principle of operation. AC DC Motor Family Tree 2 DC MOTOR CONNECTIONS
ELECTRIC MACHINES OPENLAB 0.2 kw
 THIS SYSTEM IS A COMPLETE SET OF COMPONENTS AND MODULES SUITABLE FOR ASSEMBLING THE ROTATING ELECTRIC MACHINES, BOTH FOR DIRECT CURRENT AND FOR ALTERNATING CURRENT. STUDENTS CAN PERFORM A CRITICAL AND
THIS SYSTEM IS A COMPLETE SET OF COMPONENTS AND MODULES SUITABLE FOR ASSEMBLING THE ROTATING ELECTRIC MACHINES, BOTH FOR DIRECT CURRENT AND FOR ALTERNATING CURRENT. STUDENTS CAN PERFORM A CRITICAL AND
MEBS Utilities services Department of Electrical & Electronic Engineering University of Hong Kong
 Brief comparison of induction motors with other types of motors Electric motors exhibit wide variations of speed-torque characteristics. [Adopted from EL-SHARKAWI, Mohamed A., Fundamentals of Electric
Brief comparison of induction motors with other types of motors Electric motors exhibit wide variations of speed-torque characteristics. [Adopted from EL-SHARKAWI, Mohamed A., Fundamentals of Electric
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
DHANALAKSHMI SRINIVASAN COLLEGE OF ENGINEERING AND TECHNOLOGY MAMALLAPURAM, CHENNAI
 DHANALAKSHMI SRINIVASAN COLLEGE OF ENGINEERING AND TECHNOLOGY MAMALLAPURAM, CHENNAI -603104 DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK VII SEMESTER EE6501-Power system Analysis
DHANALAKSHMI SRINIVASAN COLLEGE OF ENGINEERING AND TECHNOLOGY MAMALLAPURAM, CHENNAI -603104 DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK VII SEMESTER EE6501-Power system Analysis
Single Phase Induction Motors
 Single Phase Induction Motors Prof. T. H. Panchal Asst. Professor Department of Electrical Engineering Institute of Technology Nirma University, Ahmedabad Introduction As the name suggests, these motors
Single Phase Induction Motors Prof. T. H. Panchal Asst. Professor Department of Electrical Engineering Institute of Technology Nirma University, Ahmedabad Introduction As the name suggests, these motors
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING
 DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK 16EET41 SYNCHRONOUS AND INDUCTION MACHINES UNIT I SYNCHRONOUS GENERATOR 1. Why the stator core is laminated? 2. Define voltage regulation
DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK 16EET41 SYNCHRONOUS AND INDUCTION MACHINES UNIT I SYNCHRONOUS GENERATOR 1. Why the stator core is laminated? 2. Define voltage regulation
EEE3441 Electrical Machines Department of Electrical Engineering. Lecture. Introduction to Electrical Machines
 Department of Electrical Engineering Lecture Introduction to Electrical Machines 1 In this Lecture Induction motors and synchronous machines are introduced Production of rotating magnetic field Three-phase
Department of Electrical Engineering Lecture Introduction to Electrical Machines 1 In this Lecture Induction motors and synchronous machines are introduced Production of rotating magnetic field Three-phase
AC MOTOR TYPES. DESCRIBE how torque is produced in a single-phase AC motor. EXPLAIN why an AC synchronous motor does not have starting torque.
 Various types of AC motors are used for specific applications. By matching the type of motor to the appropriate application, increased equipment performance can be obtained. EO 1.5 EO 1.6 EO 1.7 EO 1.8
Various types of AC motors are used for specific applications. By matching the type of motor to the appropriate application, increased equipment performance can be obtained. EO 1.5 EO 1.6 EO 1.7 EO 1.8
Renewable Energy Systems 13
 Renewable Energy Systems 13 Buchla, Kissell, Floyd Chapter Outline Generators 13 Buchla, Kissell, Floyd 13-1 MAGNETISM AND ELECTROMAGNETISM 13-2 DC GENERATORS 13-3 AC SYNCHRONOUS GENERATORS 13-4 AC INDUCTION
Renewable Energy Systems 13 Buchla, Kissell, Floyd Chapter Outline Generators 13 Buchla, Kissell, Floyd 13-1 MAGNETISM AND ELECTROMAGNETISM 13-2 DC GENERATORS 13-3 AC SYNCHRONOUS GENERATORS 13-4 AC INDUCTION
A Practical Primer On Motor Drives (Part 11): AC And DC Motor Types
: AC And DC Motor Types") A Practical Primer On Motor Drives (Part 11): AC And DC Motor Types by Ken Johnson, Teledyne LeCroy, Chestnut Ridge, N.Y. ISSUE: December 2016 In the previous part in this series, the basic principles
A Practical Primer On Motor Drives (Part 11): AC And DC Motor Types by Ken Johnson, Teledyne LeCroy, Chestnut Ridge, N.Y. ISSUE: December 2016 In the previous part in this series, the basic principles
Single-Phase AC Induction Squirrel Cage Motors. Permanent Magnet Series Wound Shunt Wound Compound Wound Squirrel Cage. Induction.
 FAN ENGINEERING Information and Recommendations for the Engineer Twin City Fan FE-1100 Single-Phase AC Induction Squirrel Cage Motors Introduction It is with the electric motor where a method of converting
FAN ENGINEERING Information and Recommendations for the Engineer Twin City Fan FE-1100 Single-Phase AC Induction Squirrel Cage Motors Introduction It is with the electric motor where a method of converting
Introduction. Introduction. Switched Reluctance Motors. Introduction
 UNIVERSITY OF TECHNOLOGY, SYDNEY FACULTY OF ENGINEERING 48550 Electrical Energy Technology Switched Reluctance Motors Topics to cover: 1. Introduction 2. Structures & Torque Production 3. Drive Circuits
UNIVERSITY OF TECHNOLOGY, SYDNEY FACULTY OF ENGINEERING 48550 Electrical Energy Technology Switched Reluctance Motors Topics to cover: 1. Introduction 2. Structures & Torque Production 3. Drive Circuits
UNIT 7: STEPPER MOTORS
 UIT 7: TEPPER MOTOR 1 TEPPER MOTOR tepper motors convert digital information to mechanical motion. tepper motors rotate in distinct angular increments (steps) in response to the application of digital
UIT 7: TEPPER MOTOR 1 TEPPER MOTOR tepper motors convert digital information to mechanical motion. tepper motors rotate in distinct angular increments (steps) in response to the application of digital
UNIT 2. INTRODUCTION TO DC GENERATOR (Part 1) OBJECTIVES. General Objective
 OBJECTIVES. General Objective") DC GENERATOR (Part 1) E2063/ Unit 2/ 1 UNIT 2 INTRODUCTION TO DC GENERATOR (Part 1) OBJECTIVES General Objective : To apply the basic principle of DC generator, construction principle and types of DC generator.
DC GENERATOR (Part 1) E2063/ Unit 2/ 1 UNIT 2 INTRODUCTION TO DC GENERATOR (Part 1) OBJECTIVES General Objective : To apply the basic principle of DC generator, construction principle and types of DC generator.
Introduction to Variable Speed Drives. Pekik Argo Dahono Electrical Energy Conversion Research Laboratory. Institute of Technology Bandung
 Introduction to Pekik Argo Dahono Electrical Energy Conversion Research Laboratory Institute of Technology Bandung Why Electric Drives Electric drives are available in any power. They cover a wide range
Introduction to Pekik Argo Dahono Electrical Energy Conversion Research Laboratory Institute of Technology Bandung Why Electric Drives Electric drives are available in any power. They cover a wide range
Question Bank ( ODD)
") Programme : B.E Question Bank (2016-2017ODD) Subject Semester / Branch : EE 6703 SPECIAL ELECTRICAL MACHINES : VII-EEE UNIT - 1 PART A 1. List the applications of synchronous reluctance motors. 2. Draw
Programme : B.E Question Bank (2016-2017ODD) Subject Semester / Branch : EE 6703 SPECIAL ELECTRICAL MACHINES : VII-EEE UNIT - 1 PART A 1. List the applications of synchronous reluctance motors. 2. Draw
Some practical considerations
 ME 222: Kinematics of Machines and Mechanisms [L9] Practical Considerations Suril V. Shah IIT Jodhpur 1 Some practical considerations Pin Joints versus Sliders and Half Joints Cantilever or Straddle Mount?
ME 222: Kinematics of Machines and Mechanisms [L9] Practical Considerations Suril V. Shah IIT Jodhpur 1 Some practical considerations Pin Joints versus Sliders and Half Joints Cantilever or Straddle Mount?
INTRODUCTION TO SENSORS, TRANSDUCERS & ACTUATORS
 INTRODUCTION Transducers play a major role in mechatronics engineering & technology. These are the basic elements that convert or transform one form of energy to another form. Let us change the word energy
INTRODUCTION Transducers play a major role in mechatronics engineering & technology. These are the basic elements that convert or transform one form of energy to another form. Let us change the word energy
(d) None of the above.
 None of the above.") Dr. Mahalingam College of Engineering and Technology, Pollachi-3 (An Autonomous Institution affiliated to Anna niversity) CCET II (2016 Regulation) Name of Programme: B.E. (EEE) Course Code & Course Title:
Dr. Mahalingam College of Engineering and Technology, Pollachi-3 (An Autonomous Institution affiliated to Anna niversity) CCET II (2016 Regulation) Name of Programme: B.E. (EEE) Course Code & Course Title:
4 Wikipedia picture. Brushed DC-Machine. The 4 Quadrants. DC-motor torque characteristics. Brushless DC-Motor. Synchronous AC machines
 Vehicle Propulsion Systems Lecture 5 Hybrid Powertrains Part 2 Component Modeling Lars Eriksson Associate Professor (Docent) Vehicular Systems Linköping University November 5, 21 Energy consumption for
Vehicle Propulsion Systems Lecture 5 Hybrid Powertrains Part 2 Component Modeling Lars Eriksson Associate Professor (Docent) Vehicular Systems Linköping University November 5, 21 Energy consumption for
2006 MINI Cooper S GENINFO Starting - Overview - MINI
 MINI STARTING SYSTEM * PLEASE READ THIS FIRST * 2002-07 GENINFO Starting - Overview - MINI For information on starter removal and installation, see the following articles. For Cooper, see STARTER WITH
MINI STARTING SYSTEM * PLEASE READ THIS FIRST * 2002-07 GENINFO Starting - Overview - MINI For information on starter removal and installation, see the following articles. For Cooper, see STARTER WITH
Other actuators. Kon Mechatronic Sensors and Actuators Tapio Lantela,
 Other actuators Kon-41.3140 Mechatronic Sensors and Actuators Tapio Lantela, Overview of lecture Pneumatics Linear motion with electromagnetic devices - Conversion from rotary motion - Solenoid - Voice
Other actuators Kon-41.3140 Mechatronic Sensors and Actuators Tapio Lantela, Overview of lecture Pneumatics Linear motion with electromagnetic devices - Conversion from rotary motion - Solenoid - Voice
CHAPTER 6 INTRODUCTION TO MOTORS AND GENERATORS
 CHAPTER 6 INTRODUCTION TO MOTORS AND GENERATORS Objective Describe the necessary conditions for motor and generator operation. Calculate the force on a conductor carrying current in the presence of the
CHAPTER 6 INTRODUCTION TO MOTORS AND GENERATORS Objective Describe the necessary conditions for motor and generator operation. Calculate the force on a conductor carrying current in the presence of the
ELECTRIC MACHINES EUROLAB 0.3 kw
 index SINGLE-PHASE MOTORS SPLIT-PHASE MOTOR DL 30130 CAPACITOR MOTOR DL 30140 UNIVERSAL MOTOR DL 30150 REPULSION MOTOR DL 30170 THREE PHASE ASYNCHRONOUS MOTORS SQUIRREL CAGE THREE PHASE ASYNCHRONOUS MOTOR
index SINGLE-PHASE MOTORS SPLIT-PHASE MOTOR DL 30130 CAPACITOR MOTOR DL 30140 UNIVERSAL MOTOR DL 30150 REPULSION MOTOR DL 30170 THREE PHASE ASYNCHRONOUS MOTORS SQUIRREL CAGE THREE PHASE ASYNCHRONOUS MOTOR
Pretest Module 21 Units 1-4 AC Generators & Three-Phase Motors
 Pretest Module 21 Units 1-4 AC Generators & Three-Phase Motors 1. What are the two main parts of a three-phase motor? Stator and Rotor 2. Which part of a three-phase squirrel-cage induction motor is a
Pretest Module 21 Units 1-4 AC Generators & Three-Phase Motors 1. What are the two main parts of a three-phase motor? Stator and Rotor 2. Which part of a three-phase squirrel-cage induction motor is a
ESO 210 Introduction to Electrical Engineering
 ESO 210 Introduction to Electrical Engineering Lectures-37 Polyphase (3-phase) Induction Motor 2 Determination of Induction Machine Parameters Three tests are needed to determine the parameters in an induction
ESO 210 Introduction to Electrical Engineering Lectures-37 Polyphase (3-phase) Induction Motor 2 Determination of Induction Machine Parameters Three tests are needed to determine the parameters in an induction
UNIT-1 Drive Characteristics
 UNIT-1 Drive Characteristics DEFINITION: Systems employed for motion control are called as DRIVES Drives may employ any of the prime movers such as diesel or petrol engine, gas or steam turbines, steam
UNIT-1 Drive Characteristics DEFINITION: Systems employed for motion control are called as DRIVES Drives may employ any of the prime movers such as diesel or petrol engine, gas or steam turbines, steam
ECET 211 Electric Machines & Controls Lecture 5-1 Electric Motors. Lecture 5-1 Electric Motors
 ECET 211 Electric Machines & Controls Lecture 5-1 Electric Motors (2 of 4) Text Book: Chapter 5 Electric Motors, Electric Motors and Control Systems, by Frank D. Petruzella, published by McGraw Hill, 2015.
ECET 211 Electric Machines & Controls Lecture 5-1 Electric Motors (2 of 4) Text Book: Chapter 5 Electric Motors, Electric Motors and Control Systems, by Frank D. Petruzella, published by McGraw Hill, 2015.
ECE 325 Electric Energy System Components 6 Three Phase Induction Motors. Instructor: Kai Sun Fall 2016
 ECE 325 Electric Energy System Components 6 Three Phase Induction Motors Instructor: Kai Sun Fall 2016 1 Content (Materials are from Chapters 13-15) Components and basic principles Selection and application
ECE 325 Electric Energy System Components 6 Three Phase Induction Motors Instructor: Kai Sun Fall 2016 1 Content (Materials are from Chapters 13-15) Components and basic principles Selection and application
Historical Development
 TOPIC 3 DC MACHINES DC Machines 2 Historical Development Direct current (DC) motor is one of the first machines devised to convert electrical power into mechanical power. Its origin can be traced to the
TOPIC 3 DC MACHINES DC Machines 2 Historical Development Direct current (DC) motor is one of the first machines devised to convert electrical power into mechanical power. Its origin can be traced to the
Part- A Objective Questions (10X1=10 Marks)
") Dr. Mahalingam College of Engineering and Technology, Pollachi-3 (An Autonomous Institution) CCET 3(2016Regulation) Name of Programme: B.E. (EEE) Course Code&Course Title: 16EET41 & Synchronous & Induction
Dr. Mahalingam College of Engineering and Technology, Pollachi-3 (An Autonomous Institution) CCET 3(2016Regulation) Name of Programme: B.E. (EEE) Course Code&Course Title: 16EET41 & Synchronous & Induction
J.D ENGINEERING WORKS
 P O W E R G E N E R A T I O N About Us J. Engineering works, Manufacture Permanent Magnet Generators, AC Alternators,BLC MOTORS, Electric Motors, PMG Wind & Hydro Turbine. Mr. Gurdavinder Singh, Founder
P O W E R G E N E R A T I O N About Us J. Engineering works, Manufacture Permanent Magnet Generators, AC Alternators,BLC MOTORS, Electric Motors, PMG Wind & Hydro Turbine. Mr. Gurdavinder Singh, Founder
Three-Phase Induction Motor With Frequency Inverter
 Objectives Experiment 9 Three-Phase Induction Motor With Frequency Inverter To be familiar with the 3-phase induction motor different configuration. To control the speed of the motor using a frequency
Objectives Experiment 9 Three-Phase Induction Motor With Frequency Inverter To be familiar with the 3-phase induction motor different configuration. To control the speed of the motor using a frequency
HSI Stepper Motor Theory
 HI tepper Motor Theory Motors convert electrical energy into mechanical energy. A stepper motor converts electrical pulses into specific rotational movements. The movement created by each pulse is precise
HI tepper Motor Theory Motors convert electrical energy into mechanical energy. A stepper motor converts electrical pulses into specific rotational movements. The movement created by each pulse is precise
Module 4 Drives and Mechanisms Lecture 1 Elements of CNC machine tools: electric motors
 Module 4 Drives and Mechanisms Lecture 1 Elements of CNC machine tools: electric motors 1. Drives Basic function of a CNC machine is to provide automatic and precise motion control to its elements such
Module 4 Drives and Mechanisms Lecture 1 Elements of CNC machine tools: electric motors 1. Drives Basic function of a CNC machine is to provide automatic and precise motion control to its elements such
R13 SET - 1. b) Describe different braking methods employed for electrical motors. [8M]
![R13 SET - 1. b) Describe different braking methods employed for electrical motors. [8M]](/thumbs/89/100786446.jpg "R13 SET - 1. b) Describe different braking methods employed for electrical motors. [8M]") Code No:RT32026 R13 SET - 1 III B. Tech II Semester Regular Examinations, April - 2016 POWER SEMICONDUCTOR DRIVES (Electrical and Electronics Engineering) Time: 3 hours Maximum Marks: 70 Note: 1. Question
Code No:RT32026 R13 SET - 1 III B. Tech II Semester Regular Examinations, April - 2016 POWER SEMICONDUCTOR DRIVES (Electrical and Electronics Engineering) Time: 3 hours Maximum Marks: 70 Note: 1. Question
Types of Electric Motors
 Types of Electric Motors Electric Motors DC Motors AC Motors Other Motors Shunt motor Separately Excited motor Induction motor Stepper motor Brushless DC motor Series Motor Permanent Magnet DC (PMDC) Synchronous
Types of Electric Motors Electric Motors DC Motors AC Motors Other Motors Shunt motor Separately Excited motor Induction motor Stepper motor Brushless DC motor Series Motor Permanent Magnet DC (PMDC) Synchronous
DC CIRCUITS ELECTROMAGNETISM
 DC CIRCUITS 1. State and Explain Ohm s Law. Write in brief about the limitations of Ohm s Law. 2. State and explain Kirchhoff s laws. 3. Write in brief about disadvantages of series circuit and advantages
DC CIRCUITS 1. State and Explain Ohm s Law. Write in brief about the limitations of Ohm s Law. 2. State and explain Kirchhoff s laws. 3. Write in brief about disadvantages of series circuit and advantages
gear reduction. motor model number is determined by the following: O: Single 1: Double Motor Characteristics (1-99) Construction
 Construction") TEP OPERATIO & THEORY 1 KC tepping Motor Part umber. oncumulative positioning error (± % of step angle).. Excellent low speed/high torque characteristics without 1. tepping motor model number description
TEP OPERATIO & THEORY 1 KC tepping Motor Part umber. oncumulative positioning error (± % of step angle).. Excellent low speed/high torque characteristics without 1. tepping motor model number description
CHAPTER 3 BRUSHLESS DC MOTOR
 53 CHAPTER 3 BRUSHLESS DC MOTOR 3.1 INTRODUCTION The application of motors has spread to all kinds of fields. In order to adopt different applications, various types of motors such as DC motors, induction
53 CHAPTER 3 BRUSHLESS DC MOTOR 3.1 INTRODUCTION The application of motors has spread to all kinds of fields. In order to adopt different applications, various types of motors such as DC motors, induction
2. Draw the speed-torque characteristics of dc shunt motor and series motor. (May2013) (May 2014)
 (May 2014)") UNIT 2 - DRIVE MOTOR CHARACTERISTICS PART A 1. What is meant by mechanical characteristics? A curve is drawn between speed-torque. This characteristic is called mechanical characteristics. 2. Draw the
UNIT 2 - DRIVE MOTOR CHARACTERISTICS PART A 1. What is meant by mechanical characteristics? A curve is drawn between speed-torque. This characteristic is called mechanical characteristics. 2. Draw the
Handout Activity: HA773
 Charging system HA773-2 Handout Activity: HA773 Charging system The charging system allows for a means to recharge the battery and allow for electrical usage of components in the vehicle. The charging
Charging system HA773-2 Handout Activity: HA773 Charging system The charging system allows for a means to recharge the battery and allow for electrical usage of components in the vehicle. The charging
Creating Linear Motion One Step at a Time
 Creating Linear Motion One Step at a Time In classic mechanical engineering, linear systems are typically designed using conventional mechanical components to convert rotary into linear motion. Converting
Creating Linear Motion One Step at a Time In classic mechanical engineering, linear systems are typically designed using conventional mechanical components to convert rotary into linear motion. Converting
CHAPTER 1 INTRODUCTION
 1 CHAPTER 1 INTRODUCTION 1.1 ELECTRICAL MOTOR This thesis address the performance analysis of brushless dc (BLDC) motor having new winding method in the stator for reliability requirement of electromechanical
1 CHAPTER 1 INTRODUCTION 1.1 ELECTRICAL MOTOR This thesis address the performance analysis of brushless dc (BLDC) motor having new winding method in the stator for reliability requirement of electromechanical
Planning and Commissioning Guideline for NORD IE4 Motors with NORD Frequency Inverters
 Planning and Commissioning Guideline for NORD IE4 Motors with NORD Frequency Inverters General Information From their basic function, motors with efficiency class IE4 are synchronous motors and are suitable
Planning and Commissioning Guideline for NORD IE4 Motors with NORD Frequency Inverters General Information From their basic function, motors with efficiency class IE4 are synchronous motors and are suitable
Sensors & Actuators. Actuators Sensors & Actuators - H.Sarmento
 Sensors & Actuators Actuators 014-015 Sensors & Actuators - H.Sarmento Outline Mechanical actuators Electromechanical actuators Electric motors Piezo actuators 014-015 Sensors & Actuators - H.Sarmento
Sensors & Actuators Actuators 014-015 Sensors & Actuators - H.Sarmento Outline Mechanical actuators Electromechanical actuators Electric motors Piezo actuators 014-015 Sensors & Actuators - H.Sarmento
PAC TRAINING PUMP MOTORS
 PAC TRAINING PUMP MOTORS 1 Basics Magnet supported from above N S N S Since unlike poles repel each other, the magnet will rotate Stationary Magnet 2 Basics N S Stationary Magnet 3 Basics N N S S Stationary
PAC TRAINING PUMP MOTORS 1 Basics Magnet supported from above N S N S Since unlike poles repel each other, the magnet will rotate Stationary Magnet 2 Basics N S Stationary Magnet 3 Basics N N S S Stationary
Unternehmensportrait. High Pole Servo. Stepper Motor basics vs. High Pole Servo
 High Pole Servo Stepper Motor basics vs High Pole Servo Stepper Motor types Hybrid-Stepper Motor Principal Construction like a BLDC (brushless DC Motor), but higher pole count Rotor and Stator silicon
High Pole Servo Stepper Motor basics vs High Pole Servo Stepper Motor types Hybrid-Stepper Motor Principal Construction like a BLDC (brushless DC Motor), but higher pole count Rotor and Stator silicon
10. Starting Method for Induction Motors
 10. Starting Method for Induction Motors A 3-phase induction motor is theoretically self starting. The stator of an induction motor consists of 3-phase windings, which when connected to a 3-phase supply
10. Starting Method for Induction Motors A 3-phase induction motor is theoretically self starting. The stator of an induction motor consists of 3-phase windings, which when connected to a 3-phase supply
Hybrid Stepper Motors
 DINGS Electrical & Mechanical Co., Ltd 3 Quality Performance Flexibility Price WHO IS DINGS? DINGS is a premier supplier of rotary and linear step motors. Based in the greater Shanghai, China area, we
DINGS Electrical & Mechanical Co., Ltd 3 Quality Performance Flexibility Price WHO IS DINGS? DINGS is a premier supplier of rotary and linear step motors. Based in the greater Shanghai, China area, we
Induction Motor Control
 Induction Motor Control A much misunderstood yet vitally important facet of electrical engineering. The Induction Motor A very major consumer of electrical energy in industry today. The major source of
Induction Motor Control A much misunderstood yet vitally important facet of electrical engineering. The Induction Motor A very major consumer of electrical energy in industry today. The major source of
Electromagnetic actuation. technologies. Prof Phil Mellor
 Electromagnetic actuation technologies Prof Phil Mellor Department of Electrical and Electronic Engineering 2 Overview Review developments in electromagnetic actuation More electric aircraft Our research
Electromagnetic actuation technologies Prof Phil Mellor Department of Electrical and Electronic Engineering 2 Overview Review developments in electromagnetic actuation More electric aircraft Our research
14 Single- Phase A.C. Motors I
 Lectures 14-15, Page 1 14 Single- Phase A.C. Motors I There exists a very large market for single-phase, fractional horsepower motors (up to about 1 kw) particularly for domestic use. Like many large volume
Lectures 14-15, Page 1 14 Single- Phase A.C. Motors I There exists a very large market for single-phase, fractional horsepower motors (up to about 1 kw) particularly for domestic use. Like many large volume
Institute of Technology, Nirma University B. Tech. Sem. V: Electrical Engineering 2EE305: ELECTRICAL MACHINES II. Handout: AC Commutator Motors
 Institute of Technology, Nirma University B. Tech. Sem. V: Electrical Engineering 2EE305: ELECTRICAL MACHINES II Handout: AC Commutator Motors Prepared by: Prof. T. H. Panchal Learning Objective: Introduction
Institute of Technology, Nirma University B. Tech. Sem. V: Electrical Engineering 2EE305: ELECTRICAL MACHINES II Handout: AC Commutator Motors Prepared by: Prof. T. H. Panchal Learning Objective: Introduction
Step Motor. Mechatronics Device Report Yisheng Zhang 04/02/03. What Is A Step Motor?
 Step Motor What is a Step Motor? How Do They Work? Basic Types: Variable Reluctance, Permanent Magnet, Hybrid Where Are They Used? How Are They Controlled? How To Select A Step Motor and Driver Types of
Step Motor What is a Step Motor? How Do They Work? Basic Types: Variable Reluctance, Permanent Magnet, Hybrid Where Are They Used? How Are They Controlled? How To Select A Step Motor and Driver Types of
SPH3U UNIVERSITY PHYSICS
 SPH3U UNIVERSITY PHYSICS ELECTRICITY & MAGNETISM L (P.599-604) The large-scale production of electrical energy that we have today is possible because of electromagnetic induction. The electric generator,
SPH3U UNIVERSITY PHYSICS ELECTRICITY & MAGNETISM L (P.599-604) The large-scale production of electrical energy that we have today is possible because of electromagnetic induction. The electric generator,
Doubly fed electric machine
 Doubly fed electric machine Doubly fed electric machines are electric motors or electric generators that have windings on both stationary and rotating parts, where both windings transfer significant power
Doubly fed electric machine Doubly fed electric machines are electric motors or electric generators that have windings on both stationary and rotating parts, where both windings transfer significant power
LIMITED ANGLE TORQUE MOTORS
 LIMITED ANGLE TORQUE MOTORS Limited Angle Torque Motors H2W Technologies Limited Angle Torque Motors are ideal for compact, limited angular excursion (
LIMITED ANGLE TORQUE MOTORS Limited Angle Torque Motors H2W Technologies Limited Angle Torque Motors are ideal for compact, limited angular excursion (
B.E-EEE(Marine) Batch 7. Subject Code EE1704 Subject Name Special Electrical Machines
 Batch 7. Subject Code EE1704 Subject Name Special Electrical Machines") Course B.E-EEE(Marine) Batch 7 Semester VII Subject Code EE1704 Subject Name Special Electrical Machines Part-A Unit-1 1 List the applications of synchronous reluctance motors. 2 Draw the voltage and torque
Course B.E-EEE(Marine) Batch 7 Semester VII Subject Code EE1704 Subject Name Special Electrical Machines Part-A Unit-1 1 List the applications of synchronous reluctance motors. 2 Draw the voltage and torque
MECHATRONICS LAB MANUAL
 MECHATRONICS LAB MANUAL T.E.(Mechanical) Sem-VI Department of Mechanical Engineering SIESGST, Nerul, Navi Mumbai LIST OF EXPERIMENTS Expt. No. Title Page No. 1. Study of basic principles of sensing and
MECHATRONICS LAB MANUAL T.E.(Mechanical) Sem-VI Department of Mechanical Engineering SIESGST, Nerul, Navi Mumbai LIST OF EXPERIMENTS Expt. No. Title Page No. 1. Study of basic principles of sensing and
COMPARING SLOTTED vs. SLOTLESS BRUSHLESS DC MOTORS
 COMPARING SLOTTED vs. SLOTLESS Authored By: Engineering Team Members Pittman Motors Slotless brushless DC motors represent a unique and compelling subset of motors within the larger category of brushless
COMPARING SLOTTED vs. SLOTLESS Authored By: Engineering Team Members Pittman Motors Slotless brushless DC motors represent a unique and compelling subset of motors within the larger category of brushless
Mechatronics Chapter 10 Actuators 10-3
 MEMS1049 Mechatronics Chapter 10 Actuators 10-3 Electric Motor DC Motor DC Motor DC Motor DC Motor DC Motor Motor terminology Motor field current interaction Motor commutator It consists of a ring of
MEMS1049 Mechatronics Chapter 10 Actuators 10-3 Electric Motor DC Motor DC Motor DC Motor DC Motor DC Motor Motor terminology Motor field current interaction Motor commutator It consists of a ring of
General Purpose Permanent Magnet Motor Drive without Speed and Position Sensor
 General Purpose Permanent Magnet Motor Drive without Speed and Position Sensor Jun Kang, PhD Yaskawa Electric America, Inc. 1. Power consumption by electric motors Fig.1 Yaskawa V1000 Drive and a PM motor
General Purpose Permanent Magnet Motor Drive without Speed and Position Sensor Jun Kang, PhD Yaskawa Electric America, Inc. 1. Power consumption by electric motors Fig.1 Yaskawa V1000 Drive and a PM motor
Fachpraktikum Elektrische Maschinen. Theory of Induction Machines
 Fachpraktikum Elektrische Maschinen Theory of Induction Machines Prepared by Arda Tüysüz January 2013 Fundamentals Induction machines (also known as asynchronous machines) are by far the most common type
Fachpraktikum Elektrische Maschinen Theory of Induction Machines Prepared by Arda Tüysüz January 2013 Fundamentals Induction machines (also known as asynchronous machines) are by far the most common type