Resilient-EGI Prototype Pilot: Common Application Space Prototype Pilot
|
|
|
- Johnathan Haynes
- 6 years ago
- Views:
Transcription
1 Resilient-EGI Prototype Pilot: Common Application Space Prototype Pilot Robert P. decourcy Jeffrey Wallace 1, Sara J. Kambouris 1, Jacob Campbell 2, Christopher Garrett 3, M. Dean Garvey 1 1-Infinite Dimensions Integration, Inc., 2-AFRL/RIEBA, 3-AFRL/RYWN TA

 hosted at the Hanscom")
2 Resilient EGI Project Overview 3 Teams will collaborate to explore using the FACE standard for avionics systems development Teams will collaborate to create the initial common applications space data model and baseline Alt-Nav application Each team will then explore a different Alt-Nav technique and create an appropriate app and modification of the baseline common application space App and Data Model Results will be evaluated embedded in test vehicles and in a virtual Systems Integration Lab (vsil) hosted at the Hanscom milcloud
3 Operating System Segment Guidance App ATC Manager FACE Boundary Portable Components Segment TS Transport Services Segment Transport Capability Distribution Capability Platform Device Services EGI Aircraft Config Sensor Platform Specific Services Segment ADS-B Out ADS-B In Platform Common Services System Level Health Monitoring Configuration Service Graphics Services Graphics Service TS Configuration Capability IO GPU API I/O Services Segment I/O Service UDP Writer UDP Reader Operating System Language Runtime Application Framework Health Monitoring Device Driver Device Driver Graphics Driver Device Driver Pla$orm Displays Interface Hardware (e.g., MIL-STD-1553, Ethernet) Pla$orm Sensors Pla$orm Devices KEY FACE Defined Interface External Interface Non-Conformant Interface
4 R/C Truck Operation Use a single moderate constant speed. Read current position and heading and calculate steering angle and steering time required to reach next waypoint. Turn steering servo for the calculated steering angle and time. Initially, for simplicity, we will use four standard turn angles and with calculated turn times. If the initial location is more than 3 meters from the first waypoint, an error message will be displayed and the automatic navigation will not start. For example, if the stored waypoints are in California, and the RC truck is in Ohio, that would be an invalid condition. A single web page will be served from the RPi3 via WiFi that will contain the following control buttons and displays: Manual (use the RC transmitter to control steering and throttle). Record (records waypoints as you drive manually control the RC truck). Automatic (follows the most recent set of waypoint). Status and Error Messages such as " Ready" and "Error: too far from first waypoint". When performing a demonstration, the start location and end location will typically be the same so that the first stored waypoint will be within 3 meters of the RC truck's location when "Automatic" is started.

5 FACEbot-G I

6 FACEbot- G I Control Page The FACEbot is a mobile web server!

7 FACEbot-G I Control Page AutoNavigate the Waypoints Record Waypoints

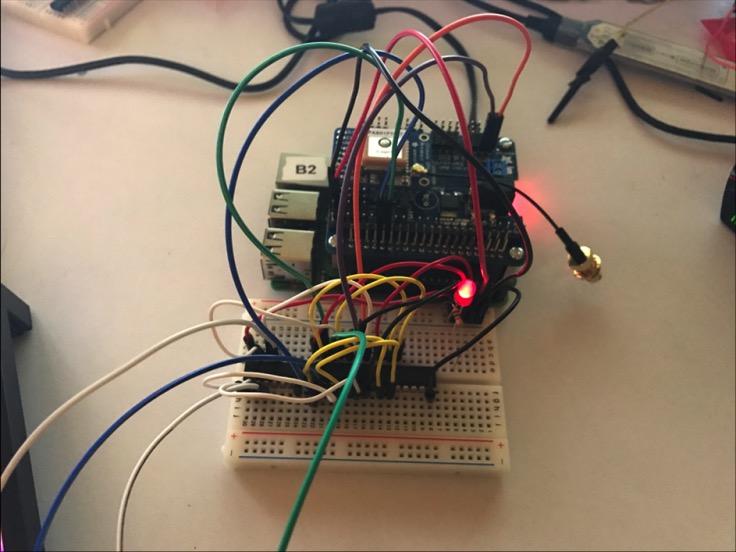
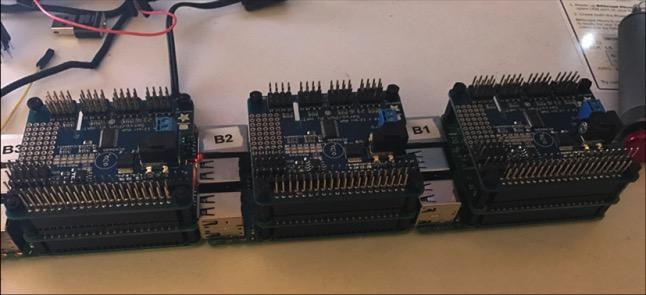
8 R/C Truck Development

9 FACEbot-A I
10 FACE Conforming Test Suite Very simple, as the external API signatures are the exact same as the stock BALSA IS EGI IS EGI Navigation PCS App ATC PCS App Phase II (add IMU sensor) required extension of the data model and PCS app signatures Alt-Nav sensors and associates data model and app modifications are more complex BALSA will continue to be the Plug Test platform
11 Greatest Challenges Understanding all the details of conformance testing Understanding how the FACE standard description is translated into code Understanding how the data model is extended Understanding how the data model is implemented Understanding how the TSS operates in this implementation How would this look in alternate implementations?
12 Lessons Learned Very easy to work with FACE compared to other DoD standards Joint Unmanned Autonomous Systems High Level Architecture Very good factorization of the software Clever usage of DIS messaging to rapidly prototype the TSS Concise reference implementation of the FACE standard made it easy for our project to get to the productive work of EGI/At-Nav design

13 Starting BALSA Data Flow

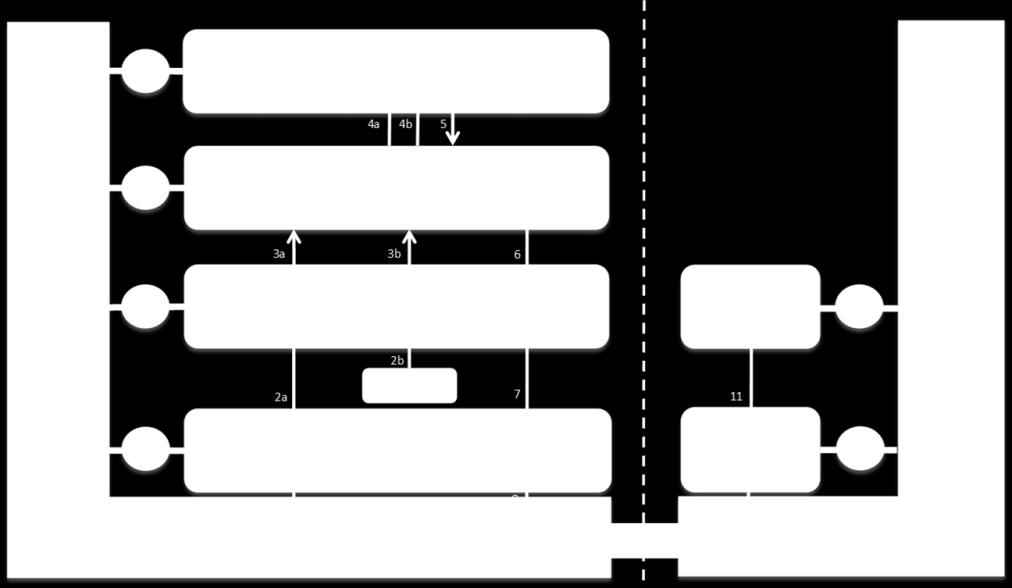
14 Modified BALSA Data Flow Phase II PCS Naviga/on App R-EGI App (LC /INS) ATC Manager c 4a 4c 4a 4b 5 TSS 13 3c 3a 3b 6 PSSS Servo IMU AircraJ Config ADS-B Out OperaWng System Language RunWme ApplicaWon Framework Health Monitoring I 14a 15a Servo API 2c IO Service IMU 1c 2a IO Service 1a 2b Local Config 7 UDP Writer 8 S Servo Drivers IMU CSV CSV Device Driver 9 Ethernet N.B. 14a, 15a Steering Servo
15 Modified BALSA Data Flow Phase IV PCS AutoNav App R-EGI App (LC /INS) ATC Manager c 4a 4c 4a 4b 5 TSS 13 3c 3a 3b 6 PSSS Servo IMU AircraJ Config ADS-B Out OperaWng System Language RunWme ApplicaWon Framework Health Monitoring 14a-g I 15a-g Servo API 2c IO Service IMU 1c 2a IO Service 1a 2b Local Config 7 UDP Writer 8 S Servo Drivers IMU CSV CSV Device Driver 9 Ethernet N.B. Servos: 14a, 15a Elevator; 14b, 15b Rudder; 14c, 15c Right Aileron; 14d, 15d; LeN Aileron; 14e, 15e Right Flap; 14f, 15f LeN Flap ; 14g, 15g Electronic Speed Control (ThroRle)

16 Modified BALSA Data Flow Phase V PCS AutoNav App R-EGI App (TC /INS) R-EGI App (LC /INS) ATC Manager a 16b 10 4c 4a 4c 4a 4b 5 TSS c 3a 3b 6 PSSS Servo IMU AircraJ Config ADS-B Out OperaWng System Language RunWme ApplicaWon Framework Health Monitoring 14a,b I 15a,b 21a,b Servo API 22a,b 2c IO Service IMU 1c 2a IO Service 1a 2b Local Config 7 UDP Writer 8 S Servo Drivers IMU CSV CSV Device Driver 9 Ethernet N.B. 21a, 22a Steering Servo; 21b, 22b ThroRle Servo

17 Modified BALSA Data Flow Phase VI PCS AutoNav App R-EGI App (TC /INS) R-EGI App (LC /INS) ATC Manager a 16b 10 4c 4a 4c 4a 4b 5 TSS c 3a 3b 6 PSSS Servo IMU AircraJ Config ADS-B Out OperaWng System Language RunWme ApplicaWon Framework Health Monitoring 14a-g I 15a-g Servo API 21a-g 22a-g 2c IO Service IMU 1c 2a IO Service 1a 2b Local Config 7 UDP Writer 8 S Servo Drivers IMU CSV CSV Device Driver 9 Ethernet N.B. Servos: 21a, 22a Elevator; 21b, 22b Rudder; 21c, 22c Right Aileron; 21d, 22d; LeN Aileron; 21e, 22e Right Flap; 21f, 22f LeN Flap ; 21g, 22g Electronic Speed Control (ThroRle)
18 Summary Added the IMU sensor infrastructure (IS, PSSS) and modify the Nav PCS app to improve the R/C truck platform Next step to transition to a small R/C fixed wing airplane (June 6-8 BITS event) Employ the Open R-EGI PCS app and data model in conjunction with a stability augmentation system (SAS) and auto-launch and land capability. Build up the vsil capabilities for, IMU, and Alt- Nav sensor simulation for a robust virtual design and test capability BALSA is our test framework
FIRST FLYING TECHNIQUES COCKPIT PREPARATION STARTUP TAXI
 1. Introduction FIRST FLYING TECHNIQUES COCKPIT PREPARATION STARTUP TAXI We aim to teach and demonstrate how to operate a general aviation aircraft and show some basic techniques and manoeuvres that every
1. Introduction FIRST FLYING TECHNIQUES COCKPIT PREPARATION STARTUP TAXI We aim to teach and demonstrate how to operate a general aviation aircraft and show some basic techniques and manoeuvres that every
UNCLASSIFIED FY 2017 OCO. FY 2017 Base
 Exhibit R-2, RDT&E Budget Item Justification: PB 2017 Air Force Date: February 2016 3600: Research, Development, Test & Evaluation, Air Force / BA 2: Applied Research COST ($ in Millions) Prior Years FY
Exhibit R-2, RDT&E Budget Item Justification: PB 2017 Air Force Date: February 2016 3600: Research, Development, Test & Evaluation, Air Force / BA 2: Applied Research COST ($ in Millions) Prior Years FY
UNCLASSIFIED. FY 2016 Base FY 2016 OCO
 Exhibit R-2, RDT&E Budget Item Justification: PB 2016 Air Force Date: February 2015 3600: Research, Development, Test & Evaluation, Air Force / BA 3: Advanced Technology Development (ATD) COST ($ in Millions)
Exhibit R-2, RDT&E Budget Item Justification: PB 2016 Air Force Date: February 2015 3600: Research, Development, Test & Evaluation, Air Force / BA 3: Advanced Technology Development (ATD) COST ($ in Millions)
Joint Unmanned Aircraft System Mission Environment (JUAS-ME)
") Joint Unmanned Aircraft System Mission Environment (JUAS-ME) A Ground Test Architecture for Army Manned/Unmanned Teaming (MUM-T) Robert E. Stone JUAS-ME Army Program Manager (PM) Advanced Technology Office
Joint Unmanned Aircraft System Mission Environment (JUAS-ME) A Ground Test Architecture for Army Manned/Unmanned Teaming (MUM-T) Robert E. Stone JUAS-ME Army Program Manager (PM) Advanced Technology Office
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration
 National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
National Aeronautics and Space Administration NASA Glenn Research Center Intelligent Power System Control Development for Deep Space Exploration Anne M. McNelis NASA Glenn Research Center Presentation
Section 1: List of Configurations Currently Approved:
 Section 1: List of Configurations Currently Approved: 1. Configuration: TD2 BASIC-Standard - Single Engine, Land, Optional Fixed or Retractable Gear, Optional Fixed Pitch or Constant Speed Propeller, Optional
Section 1: List of Configurations Currently Approved: 1. Configuration: TD2 BASIC-Standard - Single Engine, Land, Optional Fixed or Retractable Gear, Optional Fixed Pitch or Constant Speed Propeller, Optional
Design and Development of the UTSA Unmanned Aerial System ACE 1
 Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Design and Development of the UTSA Unmanned Aerial System ACE 1 For use in the 2010 AUVSI Student UAS Competition Ilhan Yilmaz Department of Mechanical Engineering (Team Lead) Christopher Weldon Department
Solar Impulse, First Round-The-World Solar Flight. Ralph Paul Head of Flight Test and Dynamics Solar Impulse June 22, 2017
 Solar Impulse, First Round-The-World Solar Flight Ralph Paul Head of Flight Test and Dynamics Solar Impulse June 22, 2017 1 Key Takeaways 1. Why Solar Energy? Renewable, no fossil fuel or polluting emissions
Solar Impulse, First Round-The-World Solar Flight Ralph Paul Head of Flight Test and Dynamics Solar Impulse June 22, 2017 1 Key Takeaways 1. Why Solar Energy? Renewable, no fossil fuel or polluting emissions
Wilga 20cc. Assembly Manual
 Wilga 20cc Assembly Manual Caution! You should not regard this plane as a toy! To ensure safety, please read this instruction manual thoroughly before assembly. Building and operating a model plane requires
Wilga 20cc Assembly Manual Caution! You should not regard this plane as a toy! To ensure safety, please read this instruction manual thoroughly before assembly. Building and operating a model plane requires
LMS Imagine.Lab AMESim Ground Loads and Flight Controls
 LMS Imagine.Lab AMESim Ground Loads and Flight Controls LMS Imagine.Lab Ground Loads and Flight Controls LMS Imagine.Lab Ground Loads and Flight Controls helps designers from the aerospace industry to
LMS Imagine.Lab AMESim Ground Loads and Flight Controls LMS Imagine.Lab Ground Loads and Flight Controls LMS Imagine.Lab Ground Loads and Flight Controls helps designers from the aerospace industry to
ROBUST AIRFRAME FOR UAV FLIGHT TESTING FOR SALE!
 ROBUST AIRFRAME FOR UAV FLIGHT TESTING FOR SALE! My team specializes in fabricating airframes that s appropriate for testing unmanned aerial vehicle components. Our airframes are made of hybrid composite
ROBUST AIRFRAME FOR UAV FLIGHT TESTING FOR SALE! My team specializes in fabricating airframes that s appropriate for testing unmanned aerial vehicle components. Our airframes are made of hybrid composite
neuron An efficient European cooperation scheme
 DIRECTION GÉNÉRALE INTERNATIONALE January, 2012 neuron An efficient European cooperation scheme I - INTRODUCTION 2 II - AIM OF THE neuron PROGRAMME 3 III - PROGRAMME ORGANISATION 4 IV - AN EFFICIENT EUROPEAN
DIRECTION GÉNÉRALE INTERNATIONALE January, 2012 neuron An efficient European cooperation scheme I - INTRODUCTION 2 II - AIM OF THE neuron PROGRAMME 3 III - PROGRAMME ORGANISATION 4 IV - AN EFFICIENT EUROPEAN
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
KEEP TRACK OF WHAT MATTERS
 KEEP TRACK OF WHAT MATTERS AUTOMATIC PASSENGER COUNTING SOLUTIONS For subways, trains, trams and train stations Automatic Passenger Counting For Subways, Trains, Trams and Train Stations INFODEV offers
KEEP TRACK OF WHAT MATTERS AUTOMATIC PASSENGER COUNTING SOLUTIONS For subways, trains, trams and train stations Automatic Passenger Counting For Subways, Trains, Trams and Train Stations INFODEV offers
Test & Validation Challenges Facing ADAS and CAV
 Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
Test & Validation Challenges Facing ADAS and CAV Chris Reeves Future Transport Technologies & Intelligent Mobility Low Carbon Vehicle Event 2016 3rd Revolution of the Automotive Sector 3 rd Connectivity
A brief History of Unmanned Aircraft
 A brief History of Unmanned Aircraft Technological Background Dr. Bérénice Mettler University of Minnesota Jan. 22-24, 2012 (v. 1/15/13) Dr. Bérénice Mettler (University of Minnesota) A brief History of
A brief History of Unmanned Aircraft Technological Background Dr. Bérénice Mettler University of Minnesota Jan. 22-24, 2012 (v. 1/15/13) Dr. Bérénice Mettler (University of Minnesota) A brief History of
HYBRID POWER FOR TELECOM SITES
 HYBRID POWER FOR TELECOM SITES ARE YOU MAKING THE MOST OF YOUR ENERGY TO REDUCE OPEX? Energy costs can amount to 55-65% of total operating expenditure for mobile operators, yet many lack the tools they
HYBRID POWER FOR TELECOM SITES ARE YOU MAKING THE MOST OF YOUR ENERGY TO REDUCE OPEX? Energy costs can amount to 55-65% of total operating expenditure for mobile operators, yet many lack the tools they
INNOVATION POWERING SAFRAN
 INNOVATION POWERING SAFRAN Stéphane CUEILLE, Chief Technology Officer 106 Safran - Capital Markets Day / November 29, Technology, key to our competitiveness R&T plan BUSINESSES PROPULSION EQUIPMENT INTERIORS
INNOVATION POWERING SAFRAN Stéphane CUEILLE, Chief Technology Officer 106 Safran - Capital Markets Day / November 29, Technology, key to our competitiveness R&T plan BUSINESSES PROPULSION EQUIPMENT INTERIORS
Development, Certification, and Flight Testing of an OPA for UAS FTT Development and Training at NTPS
 Development, Certification, and Flight Testing of an OPA for UAS FTT Development and Training at NTPS 2013 SFTE/SETP Flight Test Symposium Evolution of Flight Testing from Manned Vehicles to UAVs 1 Overview
Development, Certification, and Flight Testing of an OPA for UAS FTT Development and Training at NTPS 2013 SFTE/SETP Flight Test Symposium Evolution of Flight Testing from Manned Vehicles to UAVs 1 Overview
Compatibility of STPA with GM System Safety Engineering Process. Padma Sundaram Dave Hartfelder
 Compatibility of STPA with GM System Safety Engineering Process Padma Sundaram Dave Hartfelder Table of Contents Introduction GM System Safety Engineering Process Overview Experience with STPA Evaluation
Compatibility of STPA with GM System Safety Engineering Process Padma Sundaram Dave Hartfelder Table of Contents Introduction GM System Safety Engineering Process Overview Experience with STPA Evaluation
Super Squadron technical paper for. International Aerial Robotics Competition Team Reconnaissance. C. Aasish (M.
 Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
Super Squadron technical paper for International Aerial Robotics Competition 2017 Team Reconnaissance C. Aasish (M.Tech Avionics) S. Jayadeep (B.Tech Avionics) N. Gowri (B.Tech Aerospace) ABSTRACT The
for Critical Applications in Extreme Environments
 for Critical Applications in Extreme Environments Electronic Controllers M-CONTROL Electronic Controllers provide control for systems requiring fluid pressure and flow control via pumps, fans and compressors.
for Critical Applications in Extreme Environments Electronic Controllers M-CONTROL Electronic Controllers provide control for systems requiring fluid pressure and flow control via pumps, fans and compressors.
Prototyping Collision Avoidance for suas
 Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
Prototyping Collision Avoidance for Michael P. Owen 5 December 2017 Sponsor: Neal Suchy, FAA AJM-233 DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. Trends in Unmanned
AERO. Meet the Aero. Congratulations on your purchase of an Aero!
 AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
1.1 REMOTELY PILOTED AIRCRAFTS
 CHAPTER 1 1.1 REMOTELY PILOTED AIRCRAFTS Remotely Piloted aircrafts or RC Aircrafts are small model radiocontrolled airplanes that fly using electric motor, gas powered IC engines or small model jet engines.
CHAPTER 1 1.1 REMOTELY PILOTED AIRCRAFTS Remotely Piloted aircrafts or RC Aircrafts are small model radiocontrolled airplanes that fly using electric motor, gas powered IC engines or small model jet engines.
KNIME Server Workshop
 KNIME Server Workshop KNIME.com AG 2017 KNIME.com AG. All Rights Reserved. Agenda KNIME Products Overview 11:30 11:45 KNIME Analytics Platform Collaboration Extensions Performance Extensions Productivity
KNIME Server Workshop KNIME.com AG 2017 KNIME.com AG. All Rights Reserved. Agenda KNIME Products Overview 11:30 11:45 KNIME Analytics Platform Collaboration Extensions Performance Extensions Productivity
Energy & Power Community of Interest March 21, 2018
 Energy & Power Community of Interest March 21, 2018 Dr. Dave Drazen OUSD(R&E) Staff Specialist Distribution A: Approved for Public Release, SR Case #18-S-0986. Distribution is unlimited 1 Energy & Power
Energy & Power Community of Interest March 21, 2018 Dr. Dave Drazen OUSD(R&E) Staff Specialist Distribution A: Approved for Public Release, SR Case #18-S-0986. Distribution is unlimited 1 Energy & Power
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS
 MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
MAX PLATFORM FOR AUTONOMOUS BEHAVIORS DAVE HOFERT : PRI Copyright 2018 Perrone Robotics, Inc. All rights reserved. MAX is patented in the U.S. (9,195,233). MAX is patent pending internationally. AVTS is
AN ELECTRICAL FUEL PUMPING AND METERING SYSTEM FOR MORE ELECTRICAL AERO-ENGINES
 25 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES AN ELECTRICAL FUEL PUMPING AND METERING SYSTEM FOR MORE ELECTRICAL AERO-ENGINES Jean-Yves ROUTEX HISPANO-SUIZA, SAFRAN GROUP Keywords: Fuel, pumping,
25 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES AN ELECTRICAL FUEL PUMPING AND METERING SYSTEM FOR MORE ELECTRICAL AERO-ENGINES Jean-Yves ROUTEX HISPANO-SUIZA, SAFRAN GROUP Keywords: Fuel, pumping,
Keywords: UAS, SIL, Modular UAS
 27 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES THE DEVELOPMENT OF AN UNMANNED AIRCRAFT SYSTEMS INTEGRATION LABORATORY AND MODULAR RESEARCH UAV J S Monk Council for Scientific and Industrial
27 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES THE DEVELOPMENT OF AN UNMANNED AIRCRAFT SYSTEMS INTEGRATION LABORATORY AND MODULAR RESEARCH UAV J S Monk Council for Scientific and Industrial
Automotive Electronics/Connectivity/IoT/Smart City Track
 Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
Automotive Electronics/Connectivity/IoT/Smart City Track The Automobile Electronics Sessions explore and investigate the ever-growing world of automobile electronics that affect virtually every aspect
Состояние и перспективы развития интегрированной модульной авионики
 Международная конференция Состояние и перспективы развития интегрированной модульной авионики MASIW: Model Based Toolset for IMA System Design and Integration Alexey Khoroshilov (ISPRAS) Москва, 29-30
Международная конференция Состояние и перспективы развития интегрированной модульной авионики MASIW: Model Based Toolset for IMA System Design and Integration Alexey Khoroshilov (ISPRAS) Москва, 29-30
ACTIVE STICK & THROTTLE FOR F-35. Joseph Krumenacker NAVAIR Flight Controls / JSF Vehicle Systems 16 October 2008
 ACTIVE STICK & THROTTLE FOR F-35 Joseph Krumenacker NAVAIR Flight Controls / JSF Vehicle Systems 16 October 2008 Intro Joe Krumenacker holds a BS in Aerospace & Mechanical Engineering from the University
ACTIVE STICK & THROTTLE FOR F-35 Joseph Krumenacker NAVAIR Flight Controls / JSF Vehicle Systems 16 October 2008 Intro Joe Krumenacker holds a BS in Aerospace & Mechanical Engineering from the University
Wallbox Commander. User Guide WBCM-UG-002-EN 1/11
 Wallbox Commander User Guide 1/11 Welcome to Wallbox Congratulations on your purchase of the revolutionary electric vehicle charging system designed with cuttingedge technology to satisfy your daily needs.
Wallbox Commander User Guide 1/11 Welcome to Wallbox Congratulations on your purchase of the revolutionary electric vehicle charging system designed with cuttingedge technology to satisfy your daily needs.
Model Based Design: Balancing Embedded Controls Development and System Simulation
 All-Day Hybrid Power On the Job Model Based Design: Balancing Embedded Controls Development and System Simulation Presented by : Bill Mammen 1 Topics Odyne The Project System Model Summary 2 About Odyne
All-Day Hybrid Power On the Job Model Based Design: Balancing Embedded Controls Development and System Simulation Presented by : Bill Mammen 1 Topics Odyne The Project System Model Summary 2 About Odyne
Warning! Before continuing further, please ensure that you have NOT mounted the propellers on the MultiRotor.
 Mission Planner Setup ( optional, do not use if you have already completed the Dashboard set-up ) Warning! Before continuing further, please ensure that you have NOT mounted the propellers on the MultiRotor.
Mission Planner Setup ( optional, do not use if you have already completed the Dashboard set-up ) Warning! Before continuing further, please ensure that you have NOT mounted the propellers on the MultiRotor.
Oshkosh Corporation MTVR On Board Vehicle Power Program Update. May 5, Built Strong. Building for the Future.
 Oshkosh Corporation MTVR On Board Vehicle Power Program Update May 5, 2009 Built Strong. Building for the Future. Outline ONR OBVP Program Review Vehicle Design Aberdeen Testing Results Program Milestones
Oshkosh Corporation MTVR On Board Vehicle Power Program Update May 5, 2009 Built Strong. Building for the Future. Outline ONR OBVP Program Review Vehicle Design Aberdeen Testing Results Program Milestones
AERO. Meet the Aero. Congratulations on your purchase of an Aero!
 AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
AERO Congratulations on your purchase of an Aero! Please read the following sections of this manual to get started with your new autonomous aircraft. 1 Meet the Aero 7 Fly-by-wire mode 2 Safety 8 Command
Statement of Jim Schoppenhorst, Director, DD(X) BAE Systems / Armament Systems Division. Before the
 BAE Systems / Armament Systems Division. Before the") Statement of Jim Schoppenhorst, Director, DD(X) BAE Systems / Armament Systems Division Before the House Armed Services Committee's Subcommittee on Projection Forces July 20, 2005 1 House Armed Services
Statement of Jim Schoppenhorst, Director, DD(X) BAE Systems / Armament Systems Division Before the House Armed Services Committee's Subcommittee on Projection Forces July 20, 2005 1 House Armed Services
Mississauga Moves: A City in Transformation icity Symposium Hamish Campbell
 Mississauga Moves: A City in Transformation 2018 icity Symposium Hamish Campbell Outline Mississauga: A City in Transformation Planning for a Transformative Future Transportation Master Plan Parking Master
Mississauga Moves: A City in Transformation 2018 icity Symposium Hamish Campbell Outline Mississauga: A City in Transformation Planning for a Transformative Future Transportation Master Plan Parking Master
Instruction Manual. Specifications are subjected to change without notice due to product continuous improvements.
 Instruction Manual Specifications are subjected to change without notice due to product continuous improvements. 1 The Wargo Signature Yak 55 is the realization of my goal to have the perfect 3D and aerobatic
Instruction Manual Specifications are subjected to change without notice due to product continuous improvements. 1 The Wargo Signature Yak 55 is the realization of my goal to have the perfect 3D and aerobatic
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario FKIE Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially concerning the team s approach
Items to specify: 4. Motor Speed Control. Head Unit. Radar. Steering Wheel Angle. ego vehicle speed control
 Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity / acceleration target vehicle selection ego vehicle speed control system activation, status communication
Gas chromatography technology advancement: the new ABB PGC 5000 Marco Quiles
 Gas chromatography technology advancement: the new ABB PGC 5000 Marco Quiles ABB - 1 - PGC - Process Gas Chromatograph PGC2007 PGC2009 Physical Size Large PGC2000 PGC5000 PGC1000 Small I II III IV Application
Gas chromatography technology advancement: the new ABB PGC 5000 Marco Quiles ABB - 1 - PGC - Process Gas Chromatograph PGC2007 PGC2009 Physical Size Large PGC2000 PGC5000 PGC1000 Small I II III IV Application
Helsinki Pilot. 1. Background. 2. Challenges st challenge
 Helsinki Pilot 1. Background The massive roll out and usage of electrical cars in Finland is challenged by several factors that are mainly related to infrastructure for charging. The charging stations
Helsinki Pilot 1. Background The massive roll out and usage of electrical cars in Finland is challenged by several factors that are mainly related to infrastructure for charging. The charging stations
YS-X4 Multirotor Flight Controller-Hobby
 YS-X4 Multirotor Flight Controller-Hobby Part I-General Introduction YS-X4 Autopilot system for multirotors continued the innovationality/practicality/convenience style of Zero UAV's products, applied
YS-X4 Multirotor Flight Controller-Hobby Part I-General Introduction YS-X4 Autopilot system for multirotors continued the innovationality/practicality/convenience style of Zero UAV's products, applied
Efficient and Effective bearing performance evaluation
 Efficient and Effective bearing performance evaluation The right software platform for dedicated technical questions, based on the right knowledge and design criteria A typical design process Changes SKF
Efficient and Effective bearing performance evaluation The right software platform for dedicated technical questions, based on the right knowledge and design criteria A typical design process Changes SKF
PRESS RELEASE Q & A. The company decided from the onset to operate under a Boeing licensing umbrella to design and produce parts to Boeing standards.
 Super98 PRESS RELEASE Q & A How was Super98 started and why? Super98 was started in 2007 by private entrepreneurs and investors with the vision to extend the economic life of the popular MDC heritage TwinJets.
Super98 PRESS RELEASE Q & A How was Super98 started and why? Super98 was started in 2007 by private entrepreneurs and investors with the vision to extend the economic life of the popular MDC heritage TwinJets.
Learning paths. The path to higher performance ABB UNIVERSITY. ABB University. Learning paths
 ABB UNIVERSITY Learning paths The path to higher performance Learning paths for ABB Ability System 800xA ABB Ability Symphony Plus / Harmony Quality Control Systems Advant Master Advant MOD ABB University
ABB UNIVERSITY Learning paths The path to higher performance Learning paths for ABB Ability System 800xA ABB Ability Symphony Plus / Harmony Quality Control Systems Advant Master Advant MOD ABB University
Optimal energy efficiency, vehicle stability and safety on the OpEneR EV with electrified front and rear axles
 Optimal energy efficiency, vehicle stability and safety on the OpEneR EV with electrified front and rear axles Berlin, Monday 17 June 2013 Dr. Stephen Jones, AVL Emre Kural, AVL Alexander Massoner, AVL
Optimal energy efficiency, vehicle stability and safety on the OpEneR EV with electrified front and rear axles Berlin, Monday 17 June 2013 Dr. Stephen Jones, AVL Emre Kural, AVL Alexander Massoner, AVL
AcuBMS Battery Management System for Rechargeable Lithium-Based Batteries ELECOMP Capstone Design Project
 AcuBMS Battery Management System for Rechargeable Lithium-Based Batteries ELECOMP Capstone Design Project 2018-2019 Sponsoring Company: Acumentrics, Inc 10 Walpole Park South Walpole, MA 02081 1-617-935-7877
AcuBMS Battery Management System for Rechargeable Lithium-Based Batteries ELECOMP Capstone Design Project 2018-2019 Sponsoring Company: Acumentrics, Inc 10 Walpole Park South Walpole, MA 02081 1-617-935-7877
EPSRC-JLR Workshop 9th December 2014 TOWARDS AUTONOMY SMART AND CONNECTED CONTROL
 EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
EPSRC-JLR Workshop 9th December 2014 Increasing levels of autonomy of the driving task changing the demands of the environment Increased motivation from non-driving related activities Enhanced interface
Climber is 776B101101
 is Climber 776B101101 Introduction Product Introduction NE R/C 776B is a good-sized glider designed by Nine Eagles Company latest, whose wing span is up to 2008mm. You only need to assemble the aerofoil
is Climber 776B101101 Introduction Product Introduction NE R/C 776B is a good-sized glider designed by Nine Eagles Company latest, whose wing span is up to 2008mm. You only need to assemble the aerofoil
Sciences for Maneuver Campaign
 Mr. Eric Spero Sciences for Maneuver Campaign U.S. Army Research Laboratory Ground Air Sciences for Maneuver Campaign Science & Technology enabled air and ground platform capabilities to significantly
Mr. Eric Spero Sciences for Maneuver Campaign U.S. Army Research Laboratory Ground Air Sciences for Maneuver Campaign Science & Technology enabled air and ground platform capabilities to significantly
UNDERWATER SOLUTIONS WORLDWIDE
 UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
UNDERWATER SOLUTIONS WORLDWIDE Payload Autonomy on the Phoenix International Artemis AUV MOOS-DAWG 2015 July 22-23 Peter McKibbin IRAD/Special Projects Manager pmckibbin@phnx-international.com Brief Company
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business. Real-time Mechanism and System Simulation To Support Flight Simulators
 Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
Managing EV Load Workplace Charging Project Utility Perspective
 Managing EV Load Workplace Charging Project Utility Perspective Hawk Asgeirsson, Manager Power Systems Technologies (Retired) June 29, 2016 DTE Energy is an Integrated Energy Company 2 Agenda Why manage
Managing EV Load Workplace Charging Project Utility Perspective Hawk Asgeirsson, Manager Power Systems Technologies (Retired) June 29, 2016 DTE Energy is an Integrated Energy Company 2 Agenda Why manage
Smart Charging and Vehicle Grid Integration Silicon Valley Leadership Group PEV Forum December 16, 2014
 Smart Charging and Vehicle Grid Integration Silicon Valley Leadership Group PEV Forum December 16, 2014 Dan Bowermaster Program Manager, Electric Transportation Office: (650) 855-8524 Mobile: (650) 701-5099
Smart Charging and Vehicle Grid Integration Silicon Valley Leadership Group PEV Forum December 16, 2014 Dan Bowermaster Program Manager, Electric Transportation Office: (650) 855-8524 Mobile: (650) 701-5099
w w w. o n e r a. f r
 www. onera. fr Pioneering concepts for Personal Air Transport Systems PPlane Project AMPERE Project Hybrid electrical propulsion study PPlane : a pioneering concept for Personal Air Transport Systems The
www. onera. fr Pioneering concepts for Personal Air Transport Systems PPlane Project AMPERE Project Hybrid electrical propulsion study PPlane : a pioneering concept for Personal Air Transport Systems The
ICT Platforms for electromobility services in European cities
 ICT Platforms for electromobility services in European cities 2013 ANNUAL POLIS CONFERENCE Brussels 5 December 2013 Guido Di Pasquale, PluService.NET European Pilots on ICT for Electromobility Co-financed
ICT Platforms for electromobility services in European cities 2013 ANNUAL POLIS CONFERENCE Brussels 5 December 2013 Guido Di Pasquale, PluService.NET European Pilots on ICT for Electromobility Co-financed
One-Stop Service: Monitoring and Managing.
 One-Stop Service: Monitoring and Managing. The highest quality from the market leader Solar-Log devices are the most accurate and reliable data loggers on the market. Offer your customers high-quality
One-Stop Service: Monitoring and Managing. The highest quality from the market leader Solar-Log devices are the most accurate and reliable data loggers on the market. Offer your customers high-quality
How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]
![How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]](/thumbs/89/99262679.jpg "How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]") 1! How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution] !2 How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) Introduction Terminology
1! How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution] !2 How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) Introduction Terminology
The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT
 The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT 20-11-18 1 Index 01 Abertis Autopistas 02 Introduction 03 Road map AV 04 INFRAMIX project 05 Test site autopistas 06 Classification
The Role of Infrastructure Connected to Cars & Autonomous Driving INFRAMIX PROJECT 20-11-18 1 Index 01 Abertis Autopistas 02 Introduction 03 Road map AV 04 INFRAMIX project 05 Test site autopistas 06 Classification
Unmanned Aerial Vehicle Design, Development, and Implementation
 Unmanned Aerial Vehicle Design, Development, and Implementation Faculty Advisor Dr. David Schmidt Team Members Patrick Herklotz, Shane Kirkbride, Mike Kopps, Mark Kraska, John Ordeman, Erica Rygg, Matt
Unmanned Aerial Vehicle Design, Development, and Implementation Faculty Advisor Dr. David Schmidt Team Members Patrick Herklotz, Shane Kirkbride, Mike Kopps, Mark Kraska, John Ordeman, Erica Rygg, Matt
COLLABORATIVE MODELLING AND CO-SIMULATION:
 COLLABORATIVE MODELLING AND CO-SIMULATION: TOOLS AND TECHNIQUES FOR THE DEVELOPMENT OF INDUSTRIAL CYBER-PHYSICAL SYSTEMS PROFESSOR AND OWNER, FIRST TIME RIGHT TECHNOLOGIES (FITIRI-TECH.COM) VERSITET UNI
COLLABORATIVE MODELLING AND CO-SIMULATION: TOOLS AND TECHNIQUES FOR THE DEVELOPMENT OF INDUSTRIAL CYBER-PHYSICAL SYSTEMS PROFESSOR AND OWNER, FIRST TIME RIGHT TECHNOLOGIES (FITIRI-TECH.COM) VERSITET UNI
SecureUPS On-Line 120V AC Output, 1300VA
 SecureUPS On-Line 120V AC Output, 1300VA Trusted Power Protection Solution for Intelligent Transportation Systems (ITS) Challenges Intelligent transportation systems (ITS) are using innovative traffic
SecureUPS On-Line 120V AC Output, 1300VA Trusted Power Protection Solution for Intelligent Transportation Systems (ITS) Challenges Intelligent transportation systems (ITS) are using innovative traffic
Future C4ISR Technologies on Ground Platforms
 Future C4ISR Technologies on Ground Platforms Mr. Gary Blohm Director, Communications-Electronics Research, Development and Engineering Center 732-427-3967 www.cerdec.army.mil 2 February 2009 CERDEC Mission
Future C4ISR Technologies on Ground Platforms Mr. Gary Blohm Director, Communications-Electronics Research, Development and Engineering Center 732-427-3967 www.cerdec.army.mil 2 February 2009 CERDEC Mission
With digital twin to the Factory of the Future Part I
 With digital twin to the Factory of the Future Part I Bosch Rexroth and Dassault Systèmes will use a modular assembly line to show how the Factory of the Future can be efficiently planned, implemented
With digital twin to the Factory of the Future Part I Bosch Rexroth and Dassault Systèmes will use a modular assembly line to show how the Factory of the Future can be efficiently planned, implemented
Sheffield Hallam University Engineering Masterclass Programme 2015
 Sheffield Hallam University For more information please contact Helen King Special Projects Officer Engineering and Tel: 0114 225 6459 Email: h.king@shu.ac.uk An overview We are excited to launch Sheffield
Sheffield Hallam University For more information please contact Helen King Special Projects Officer Engineering and Tel: 0114 225 6459 Email: h.king@shu.ac.uk An overview We are excited to launch Sheffield
Open Source Big Data Management for Connected Vehicles
 Open Source Big Data Management for Connected Vehicles May 11, 2017 Florian von Walter Manager, Solution Engineering DACH, Hortonworks GENIVI Alliance Michael Ger General Manager, Automotive, Hortonworks
Open Source Big Data Management for Connected Vehicles May 11, 2017 Florian von Walter Manager, Solution Engineering DACH, Hortonworks GENIVI Alliance Michael Ger General Manager, Automotive, Hortonworks
AC : SMART GRID DEVELOPMENT IN ELECTRICAL DIS- TRIBUTION NETWORK
 AC 2011-2689: SMART GRID DEVELOPMENT IN ELECTRICAL DIS- TRIBUTION NETWORK Saeed Sean Monemi, California State Polytechnic University, Pomona Dr. Saeed Sean Monemi is a professor of Electrical and Computer
AC 2011-2689: SMART GRID DEVELOPMENT IN ELECTRICAL DIS- TRIBUTION NETWORK Saeed Sean Monemi, California State Polytechnic University, Pomona Dr. Saeed Sean Monemi is a professor of Electrical and Computer
Automated Driving is the declared goal of the automotive industry. Systems evolve from complicated to complex
 Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
Automated Driving is the declared goal of the automotive industry Systems evolve from complicated to complex Radar Steering Wheel Angle Motor Speed Control Head Unit target vehicle candidates, their velocity
ECUSimLite System User Manual
 1 ECUSimLite System User Manual Table of contents 2 1. Introduction 3 1.1. Modes 3 1.2. Kit Contents 3 2. ECUSimLite Block Diagram 4 2.1. Connection Sequence 4 2.2. Getting Started 5 2.2.1. Set Range 6
1 ECUSimLite System User Manual Table of contents 2 1. Introduction 3 1.1. Modes 3 1.2. Kit Contents 3 2. ECUSimLite Block Diagram 4 2.1. Connection Sequence 4 2.2. Getting Started 5 2.2.1. Set Range 6
European Conference on Nanoelectronics and Embedded Systems for Electric Mobility. Internet of Energy Ecosystems Solutions
 European Conference on Nanoelectronics and Embedded Systems for Electric Mobility ecocity emotion 24-25 th September 2014, Erlangen, Germany Internet of Energy Ecosystems Solutions Dr. Randolf Mock, Siemens
European Conference on Nanoelectronics and Embedded Systems for Electric Mobility ecocity emotion 24-25 th September 2014, Erlangen, Germany Internet of Energy Ecosystems Solutions Dr. Randolf Mock, Siemens
Solar-Log - The intelligent PV-Energy Management System
 Solar-Log - The intelligent PV-Energy Management System With the Solar-Log, Solare Datensysteme GmbH (SDS) offers the most sophisticated energy management system. Solar-Log represents professional PV monitoring,
Solar-Log - The intelligent PV-Energy Management System With the Solar-Log, Solare Datensysteme GmbH (SDS) offers the most sophisticated energy management system. Solar-Log represents professional PV monitoring,
OPENSTEERING PLATFORM
 MDYNAMIX AFFILIATED INSTITUTE OF MUNICH UNIVERSITY OF APPLIED SCIENCES OPENSTEERING PLATFORM FOR DEVELOPMENT OF ADVANCED STEERING FUNCTIONS, ADAS AND AUTONOMOUS VEHICLES 9th International Munich Chassis
MDYNAMIX AFFILIATED INSTITUTE OF MUNICH UNIVERSITY OF APPLIED SCIENCES OPENSTEERING PLATFORM FOR DEVELOPMENT OF ADVANCED STEERING FUNCTIONS, ADAS AND AUTONOMOUS VEHICLES 9th International Munich Chassis
AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport
: Developing Automated Driving Pilots for IoT: Brainport") AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport 31 May 2018 16.00-17.00 CET 31/05/2018 This project has received funding from the European Union s Horizon 2020 research
AUTOPILOT Webinar Series (II): Developing Automated Driving Pilots for IoT: Brainport 31 May 2018 16.00-17.00 CET 31/05/2018 This project has received funding from the European Union s Horizon 2020 research
GREENER CLEANER PLANET FOR A. TekMindz develops a Cloud based platform for managing charge network stations. INDZ TEK
 FOR A GREENER CLEANER PLANET TekMindz develops a Cloud based platform for managing charge network stations. TEK INDZ TM About The Client The Client is one of the leading providers of electrical charging
FOR A GREENER CLEANER PLANET TekMindz develops a Cloud based platform for managing charge network stations. TEK INDZ TM About The Client The Client is one of the leading providers of electrical charging
Aquaticus Robot Platform - The Heron USV
 Aquaticus Robot Platform - The Heron USV September 2018 Michael Benjamin, mikerb@mit.edu Paul Robinette, paulrobi@mit.edu Michael Novitzky, novitzky@mit.edu Caileigh Fitzgerald, caileigh@mit.edu Department
Aquaticus Robot Platform - The Heron USV September 2018 Michael Benjamin, mikerb@mit.edu Paul Robinette, paulrobi@mit.edu Michael Novitzky, novitzky@mit.edu Caileigh Fitzgerald, caileigh@mit.edu Department
TABLE OF CONTENTS. Thank you for your interest in CUAir
 SPONSORSHIP INFORMATION 2018-2019 TABLE OF CONTENTS The Team Subteams The Competition Theia II Accomplishments 2019 Air System Outreach Why Contribute Sponsorship Levels 2017-2018 Sponsors Contact Us 3
SPONSORSHIP INFORMATION 2018-2019 TABLE OF CONTENTS The Team Subteams The Competition Theia II Accomplishments 2019 Air System Outreach Why Contribute Sponsorship Levels 2017-2018 Sponsors Contact Us 3
Compass4D Deployment
 Compass4D Deployment Bordeaux Pilot Site Project presentation The European project Compass4D focuses on services which will : Increase drivers safety and comfort Have a positive impact on the local environment
Compass4D Deployment Bordeaux Pilot Site Project presentation The European project Compass4D focuses on services which will : Increase drivers safety and comfort Have a positive impact on the local environment
DEMAND RESPONSE EMERGING TECHNOLOGIES PROGRAM SEMI-ANNUAL REPORT 2015
 DEMAND RESPONSE EMERGING TECHNOLOGIES PROGRAM SEMI-ANNUAL REPORT 2015 September 30, 2015 Table of Contents Table of Contents... 2 I. Summary... 4 II. Completed Projects in Q2 2015 and Q3 2015... 4 A. HVAC
DEMAND RESPONSE EMERGING TECHNOLOGIES PROGRAM SEMI-ANNUAL REPORT 2015 September 30, 2015 Table of Contents Table of Contents... 2 I. Summary... 4 II. Completed Projects in Q2 2015 and Q3 2015... 4 A. HVAC
Virginia Tech Research Center Arlington, Virginia, USA
 SMART BUILDINGS AS BUILDING BLOCKS OF A SMART CITY Professor Saifur Rahman Virginia Tech Advanced Research Institute Electrical & Computer Engg Department National University of Singapore Singapore, 10
SMART BUILDINGS AS BUILDING BLOCKS OF A SMART CITY Professor Saifur Rahman Virginia Tech Advanced Research Institute Electrical & Computer Engg Department National University of Singapore Singapore, 10
Automotive NVH with Abaqus. About this Course
 Automotive NVH with Abaqus R 6.12 About this Course Course objectives Upon completion of this course you will be able to: Perform natural frequency extractions Perform sound radiation analyses (acoustics)
Automotive NVH with Abaqus R 6.12 About this Course Course objectives Upon completion of this course you will be able to: Perform natural frequency extractions Perform sound radiation analyses (acoustics)
SAFETY INSTRUCTIONS. 1. Please read this manual carefully and follow the instructions of the manual before you use this products.
 INSTRUCTION MANUAL 1. Please read this manual carefully and follow the instructions of the manual before you use this products. SAFETY INSTRUCTIONS 2. Our airplane is not a toy, which is only suitable
INSTRUCTION MANUAL 1. Please read this manual carefully and follow the instructions of the manual before you use this products. SAFETY INSTRUCTIONS 2. Our airplane is not a toy, which is only suitable
Smart Testing of Smart Charging
 Smart Testing of Smart Charging Consistent Test Case Coverage for Electric Mobility With the increasing diversity of electric vehicles and charging station systems, interoperability between components
Smart Testing of Smart Charging Consistent Test Case Coverage for Electric Mobility With the increasing diversity of electric vehicles and charging station systems, interoperability between components
DYNA4 Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library
 Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library DYNA4 Concept DYNA4 is an open and modular simulation framework for efficient working with simulation
Open Simulation Framework with Flexible Support for Your Work Processes and Modular Simulation Model Library DYNA4 Concept DYNA4 is an open and modular simulation framework for efficient working with simulation
UNIFIED: RC Aircraft Competition. Introduction
 UNIFIED: RC Aircraft Competition Introduction FLIGHT TRAINING Primary contact: Scott Christopher Please keep in mind, I m I m doing this project as well SYSTEM Starter Session Simulator skill building
UNIFIED: RC Aircraft Competition Introduction FLIGHT TRAINING Primary contact: Scott Christopher Please keep in mind, I m I m doing this project as well SYSTEM Starter Session Simulator skill building
Clean Sky 2. LifeCraft Demonstrationt (IADP RC 2 & ITDs) Consultation meetings Brussels th December 2012 OUTLINE
 Consultation meetings Brussels th December 2012 OUTLINE") Clean Sky 2 LifeCraft Demonstrationt (IADP RC 2 & ITDs) Consultation meetings Brussels 10-14 th December 2012 1 1 LifeCraft - The Compound Demo OUTLINE Presentation of the Compound R/C Concept Impact &
Clean Sky 2 LifeCraft Demonstrationt (IADP RC 2 & ITDs) Consultation meetings Brussels 10-14 th December 2012 1 1 LifeCraft - The Compound Demo OUTLINE Presentation of the Compound R/C Concept Impact &
Program Goals and Objectives/Instructional Design. Title: Beyond Multi-Copters: Transitioning the New Drone Pilot to Fixed Wing Aircraft
 Program Goals and Objectives/ Design Title: Beyond Multi-Copters: Transitioning the New Drone Pilot to Fixed Wing Aircraft Instructor: James M. Page, LeTourneau University and Seraphim Aerial Program Goal:
Program Goals and Objectives/ Design Title: Beyond Multi-Copters: Transitioning the New Drone Pilot to Fixed Wing Aircraft Instructor: James M. Page, LeTourneau University and Seraphim Aerial Program Goal:
Integrated Architectures Management, Behavior models, Controls and Software
 Integrated Architectures Management, Behavior models, Controls and Software Realize innovation. Engineering challenges Bringing everything together Fuel efficiency Emissions Acceleration Performance Energy
Integrated Architectures Management, Behavior models, Controls and Software Realize innovation. Engineering challenges Bringing everything together Fuel efficiency Emissions Acceleration Performance Energy
Five Cool Things You Can Do With Powertrain Blockset The MathWorks, Inc. 1
 Five Cool Things You Can Do With Powertrain Blockset Mike Sasena, PhD Automotive Product Manager 2017 The MathWorks, Inc. 1 FTP75 Simulation 2 Powertrain Blockset Value Proposition Perform fuel economy
Five Cool Things You Can Do With Powertrain Blockset Mike Sasena, PhD Automotive Product Manager 2017 The MathWorks, Inc. 1 FTP75 Simulation 2 Powertrain Blockset Value Proposition Perform fuel economy
Electric Vehicle Cyber Research
 Track 7 Vehicle Cyber Security Electric Vehicle Cyber Research Kenneth Rohde Idaho National Laboratory August 16, 2017 Tampa Convention Center Tampa, Florida INL/CON-17-42726 Background CAN Bus Security
Track 7 Vehicle Cyber Security Electric Vehicle Cyber Research Kenneth Rohde Idaho National Laboratory August 16, 2017 Tampa Convention Center Tampa, Florida INL/CON-17-42726 Background CAN Bus Security
Heavy-Duty Vehicle Efficiency Global status and current research
 Heavy-Duty Vehicle Efficiency Global status and current research Oscar Delgado, Senior Researcher GFEI Fuel Economy State of the World Jan 11 2016 Outline Relevance of HDVs and status of regulations ICCT
Heavy-Duty Vehicle Efficiency Global status and current research Oscar Delgado, Senior Researcher GFEI Fuel Economy State of the World Jan 11 2016 Outline Relevance of HDVs and status of regulations ICCT
INTELLIGENT ENERGY MANAGEMENT IN A TWO POWER-BUS VEHICLE SYSTEM. DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited.
 INTELLIGENT ENERGY MANAGEMENT IN A TWO POWER-BUS VEHICLE SYSTEM 1 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated to average
INTELLIGENT ENERGY MANAGEMENT IN A TWO POWER-BUS VEHICLE SYSTEM 1 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection of information is estimated to average
Regional activities and FOTs: Connected and automated driving trials in Finland
 Regional activities and FOTs: Connected and automated driving trials in Finland Alina Koskela Special adviser Emerging services and R&D Responsible traffic. @alina_koskela Courage and co-operation. Topics
Regional activities and FOTs: Connected and automated driving trials in Finland Alina Koskela Special adviser Emerging services and R&D Responsible traffic. @alina_koskela Courage and co-operation. Topics
Electric Vehicle Cyber Research
 Electric Vehicle Cyber Research SANS Automotive Cybersecurity Workshop www.inl.gov Kenneth Rohde May 2017 INL/CON-17-41746 Background CAN Bus Security (2013) Hacker Smart Grid EVSE Assessments (2014) Four
Electric Vehicle Cyber Research SANS Automotive Cybersecurity Workshop www.inl.gov Kenneth Rohde May 2017 INL/CON-17-41746 Background CAN Bus Security (2013) Hacker Smart Grid EVSE Assessments (2014) Four
RESILIENT SOLAR CASE STUDY: SUNY New Paltz NYPA Integrated Grid Pilot
 PROJECTS UNDER DEVELOPMENT PROJECT SNAPSHOTS Location: SUNY New Paltz, NYS System Owners: Direct Purchase SUNY New Paltz Campus Project Goal: Resilience, energy savings, grid services, and research System
PROJECTS UNDER DEVELOPMENT PROJECT SNAPSHOTS Location: SUNY New Paltz, NYS System Owners: Direct Purchase SUNY New Paltz Campus Project Goal: Resilience, energy savings, grid services, and research System
AVL Virtual Testbed. Calibrate beyond the limits
 AVL Virtual Testbed Calibrate beyond the limits THE CHALLENGE Calibration Complexity The increasing vehicle diversity, combined with a multi tude of worldwide emissions regulations, the future introduction
AVL Virtual Testbed Calibrate beyond the limits THE CHALLENGE Calibration Complexity The increasing vehicle diversity, combined with a multi tude of worldwide emissions regulations, the future introduction