Friday, 27 June Realizing a small UAV for medical transport in developing countries Master thesis: Ferdinand Peters. Dr.One
|
|
|
- Tracey Lindsey
- 5 years ago
- Views:
Transcription
1 Dr.One Friday, 27 June 2014 Realizing a small UAV for medical transport in developing countries Master thesis: Ferdinand Peters 1

2 Definition Drone (bee) From Wikipedia, the free encyclopedia Drones are male honey bees. They develop from eggs that have not been fertilized, and they cannot sting. In the 16th century it was given the figurative sense of 'idler' or 'lazy worker', as male bees make no honey, which is sometimes given as a folk etymology of the word 'drone' itself. Challenge the future 2
 Challenge")
3 Google Search (present) Challenge the future 3



4 Google Search (future) Challenge the future 4
5 Dr.One Friday, 27 June 2014 Realizing a small UAV for medical transport in developing countries Master thesis: Ferdinand Peters 5
6 Outline presentation Problem definition Design Design Tool Body Wings Propulsion Example design Dynamics & Control Dynamic analysis Control design 6
7 Problem Definition Source: 7


8 Problem Definition 8



9 Possible applications Urgent medical supply Final link in the supply chain Unreachable locations Blood sample collection & Lab on a chip 9


10 Design Requirements Vertical take-off and landing (VTOL) Long range High flight speed Autonomous flight Mechanically simple Source: Low cost Unit Maintenance Manufacturing Mechanically simple Source: Locally produced and designed 10
11 Design Chosen configuration 4 motor Hybrid flying wing Electric powered Inexpensive materials Minimize moving parts 11



12 Design Flexible design Automatic sizing for different payloads Source: mytransfusion.com Source: aimlab.com Source: 12
13 Design Tool Main focus points Scalability Easy to use Modular approach Affordibility 13
14 Design Tool Sequence Body sizing Wing sizing Motor selection Propeller selection 14

15 Body sizing Side-plane 3D-Body Front-plane: Cosine 15
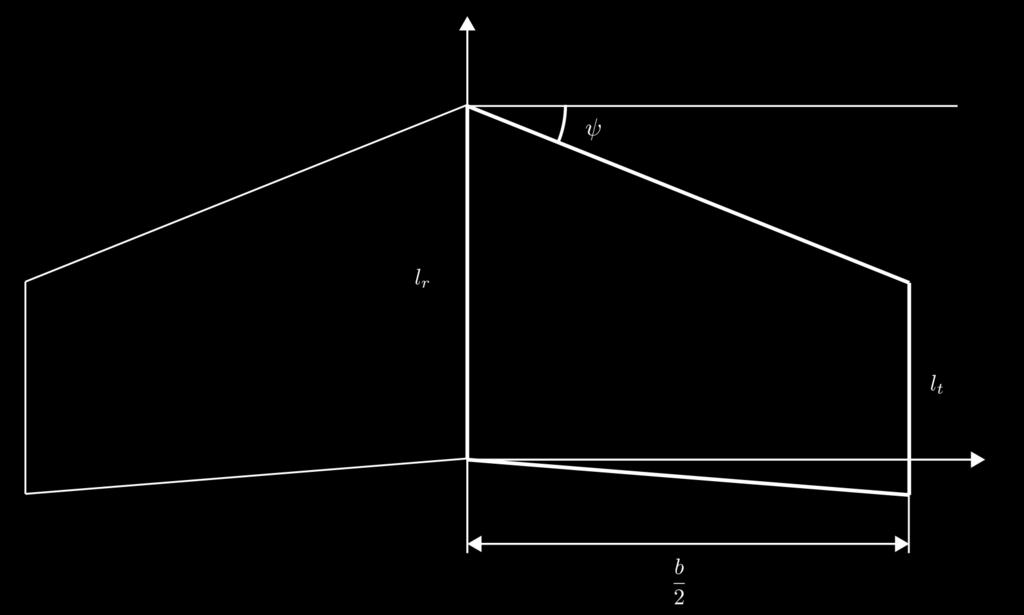
16 Wing Sizing Parameterization 16


17 Wing sizing Flight condition 17
18 Wing sizing Objective function 18


19 Propulsion sizing Motor performance characteristics Performance data can be acquired from the manufacturer Not always available A test to determine experimentally. Source:mikrokopter.de 19
20 Motor Selection Test comparison 20

21 Propeller Selection Propeller performance characteristics Windtunnel data Source: 21
22 Propeller Motor matching Static 22

23 Propeller Motor matching Dynamic 23
24 Example design GUI Are you ready to design your first Dr.One? 24


25 Production 3D-milling & hot wire cutter 25
26 Outline presentation Problem definition Design Design Tool Body Wings Propulsion Example design Dynamics & Control Dynamic analysis Control design Validation of dynamic model 26

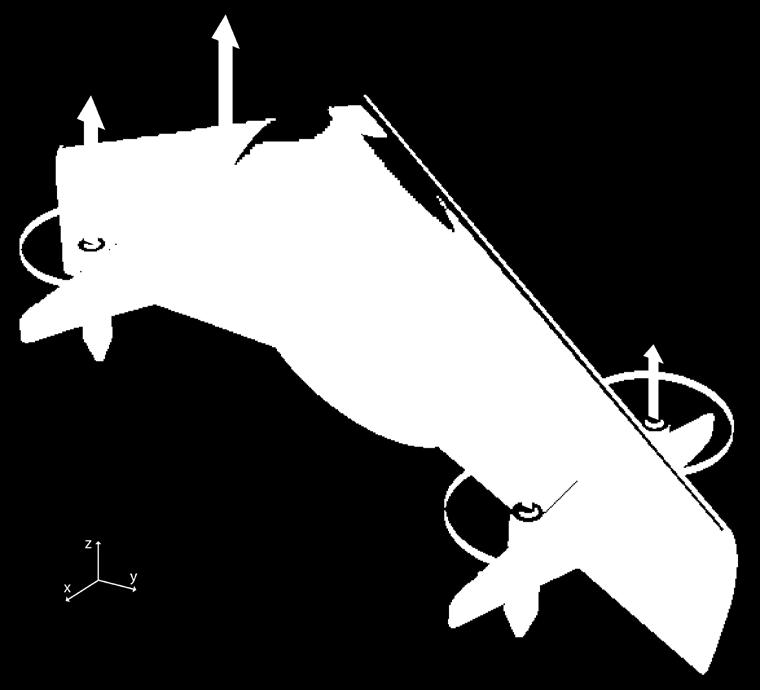
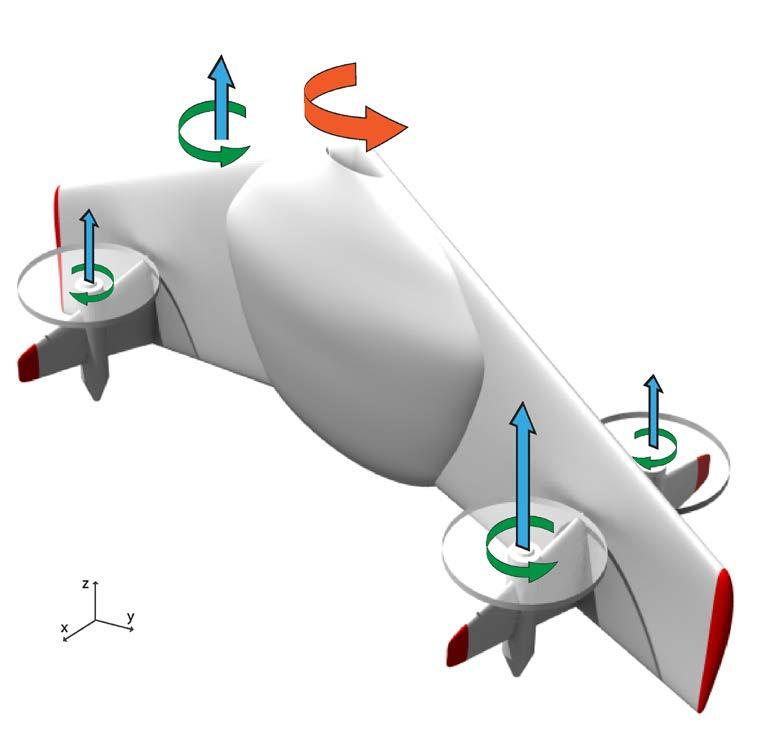
27 Control Vertical mode 27
28 Control Horizontal mode 28
29 Control design Possible control loop PID Feedback controller Input: 4 rotational velocities Output: 12 states (3 translations, 3 rotations and their velocities) 29
30 Dynamic model Modified model by Skander Tamallaah (NLR) Rigid body dynamics 30
31 Dynamics Analysis Trim 31
32 Dynamics Analysis Linearized system 32
33 Control Design Pitch control 33
34 Control Design Yaw and roll control check 34




35 Validation of dynamic model Flight tests Accurate flight data High frequency (100 Hz) Log platform: IMU Barometer RPM sensors 35
36 Validation of the log platform Flight test 36
37 Back up slides 37
38 Body sizing Cosine vs Spline 38
39 Wing Sizing Airfoil MH-60 Tailless aircraft: Zero pitch airfoil 39
40 Wing Sizing Lift and drag forces 40
41 Wing sizing Lift and drag coefficients 41

42 Wing Sizing Minimum drag 42
43 Motor Selection Motor performance characteristics 43
44 Motor Selection Motor performance characteristics 44
45 Motor Selection Motor performance characteristics 45
46 Total Efficiency Curve(1) Consistent variables 46
47 Total Efficiency Curve(1) Consistent variables 47
48 Control Design Pitch control 48
49 Control Design Pitch control: Differential gain 49
50 Control Design Pitch control: PI controller gain scheduling 50
51 Control Design Pitch control: simulation 51
52 Control Design Pitch control: simulation PI 52

53 Control Design Pitch control: simulation PID 53
54 Validation of dynamic model Procedure Cross reference flight data output with model input 54
55 Validation of dynamic model Flight tests Accurate flight data: Attitude Velocities (translational and rotational) Accelerations (translational and rotational) High frequency (100 Hz) 55

56 A possible control loop Lisa/M 56
57 Dynamic model Modified model by Skander Tamallaah (NLR) State vector 57
58 Dynamic analysis Dutch roll 58
FLYING CAR NANODEGREE SYLLABUS
 FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
FLYING CAR NANODEGREE SYLLABUS Term 1: Aerial Robotics 2 Course 1: Introduction 2 Course 2: Planning 2 Course 3: Control 3 Course 4: Estimation 3 Term 2: Intelligent Air Systems 4 Course 5: Flying Cars
Electric VTOL Aircraft
 Electric VTOL Aircraft Subscale Prototyping Overview Francesco Giannini fgiannini@aurora.aero 1 08 June 8 th, 2017 Contents Intro to Aurora Motivation & approach for the full-scale vehicle Technical challenges
Electric VTOL Aircraft Subscale Prototyping Overview Francesco Giannini fgiannini@aurora.aero 1 08 June 8 th, 2017 Contents Intro to Aurora Motivation & approach for the full-scale vehicle Technical challenges
Chapter 3: Aircraft Construction
 Chapter 3: Aircraft Construction p. 1-3 1. Aircraft Design, Certification, and Airworthiness 1.1. Replace the letters A, B, C, and D by the appropriate name of aircraft component A: B: C: D: E: 1.2. What
Chapter 3: Aircraft Construction p. 1-3 1. Aircraft Design, Certification, and Airworthiness 1.1. Replace the letters A, B, C, and D by the appropriate name of aircraft component A: B: C: D: E: 1.2. What
Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles
 Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles Stuart Boland Derek Keen 1 Justin Nelson Brian Taylor Nick Wagner Dr. Thomas Bradley 47 th AIAA/ASME/SAE/ASEE JPC Outline
Powertrain Design for Hand- Launchable Long Endurance Unmanned Aerial Vehicles Stuart Boland Derek Keen 1 Justin Nelson Brian Taylor Nick Wagner Dr. Thomas Bradley 47 th AIAA/ASME/SAE/ASEE JPC Outline
MAV and UAV Research at Rochester Institute of Technology. Rochester Institute of Technology
 MAV and UAV Research at Andrew Streett 5 th year BS/MS Student 2005-2006 MAV Team Lead Jason Grow BS/MS Graduate of RIT 2003-2004 MAV Team Lead Boeing Phantom Works, HB 714-372-9026 jason.a.grow@boeing.com
MAV and UAV Research at Andrew Streett 5 th year BS/MS Student 2005-2006 MAV Team Lead Jason Grow BS/MS Graduate of RIT 2003-2004 MAV Team Lead Boeing Phantom Works, HB 714-372-9026 jason.a.grow@boeing.com
Dragon Eye. Jessica Walker Rich Stark Brian Squires. AOE 4124 Configuration Aerodynamics
 Dragon Eye Jessica Walker Rich Stark Brian Squires Outline Purpose/Mission Air Vehicle Configuration Airfoil Data Planform Data Aerodynamic Characteristics Assessment Purpose / Mission: Real-Time Imagery
Dragon Eye Jessica Walker Rich Stark Brian Squires Outline Purpose/Mission Air Vehicle Configuration Airfoil Data Planform Data Aerodynamic Characteristics Assessment Purpose / Mission: Real-Time Imagery
a Challenge for Lift-Based, Rigid Wing AWE Systems
 Eric Nguyen Van, Lorenzo Fagiano, Stephan Schnez ABB Corporate Research December 8 th, 2015 Take-Off and Landing a Challenge for Lift-Based, Rigid Wing AWE Systems Outline ABB s Interest in AWE assessment
Eric Nguyen Van, Lorenzo Fagiano, Stephan Schnez ABB Corporate Research December 8 th, 2015 Take-Off and Landing a Challenge for Lift-Based, Rigid Wing AWE Systems Outline ABB s Interest in AWE assessment
A brief History of Unmanned Aircraft
 A brief History of Unmanned Aircraft Technological Background Dr. Bérénice Mettler University of Minnesota Jan. 22-24, 2012 (v. 1/15/13) Dr. Bérénice Mettler (University of Minnesota) A brief History of
A brief History of Unmanned Aircraft Technological Background Dr. Bérénice Mettler University of Minnesota Jan. 22-24, 2012 (v. 1/15/13) Dr. Bérénice Mettler (University of Minnesota) A brief History of
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business. Real-time Mechanism and System Simulation To Support Flight Simulators
 Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
Y. Lemmens, T. Benoit, J. de Boer, T. Olbrechts LMS, A Siemens Business Real-time Mechanism and System Simulation To Support Flight Simulators Smarter decisions, better products. Contents Introduction
German Aerospace Center Flight Operations
 German Aerospace Center Flight Operations Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes distributed over 8 main research centers
German Aerospace Center Flight Operations Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes distributed over 8 main research centers
Primary control surface design for BWB aircraft
 Primary control surface design for BWB aircraft 4 th Symposium on Collaboration in Aircraft Design 2014 Dr. ir. Mark Voskuijl, ir. Stephen M. Waters, ir. Crispijn Huijts Challenge Multiple redundant control
Primary control surface design for BWB aircraft 4 th Symposium on Collaboration in Aircraft Design 2014 Dr. ir. Mark Voskuijl, ir. Stephen M. Waters, ir. Crispijn Huijts Challenge Multiple redundant control
Development of a Variable Stability, Modular UAV Airframe for Local Research Purposes
 Development of a Variable Stability, Modular UAV Airframe for Local Research Purposes John Monk Principal Engineer CSIR, South Africa 28 October 2008 Outline A Brief History of UAV Developments at the
Development of a Variable Stability, Modular UAV Airframe for Local Research Purposes John Monk Principal Engineer CSIR, South Africa 28 October 2008 Outline A Brief History of UAV Developments at the
Flight Stability and Control of Tailless Lambda Unmanned Aircraft
 IJUSEng 2013, Vol. 1, No. S2, 1-4 http://dx.doi.org/10.14323/ijuseng.2013.5 Editor s Technical Note Flight Stability and Control of Tailless Lambda Unmanned Aircraft Pascual Marqués Unmanned Vehicle University,
IJUSEng 2013, Vol. 1, No. S2, 1-4 http://dx.doi.org/10.14323/ijuseng.2013.5 Editor s Technical Note Flight Stability and Control of Tailless Lambda Unmanned Aircraft Pascual Marqués Unmanned Vehicle University,
Propeller blade shapes
 31 1 Propeller blade shapes and Propeller Tutorials 2 Typical Propeller Blade Shape 3 M Flight M. No. Transonic Propeller Airfoil 4 Modern 8-bladed propeller with transonic airfoils near the tip and swept
31 1 Propeller blade shapes and Propeller Tutorials 2 Typical Propeller Blade Shape 3 M Flight M. No. Transonic Propeller Airfoil 4 Modern 8-bladed propeller with transonic airfoils near the tip and swept
NIMA RASHVAND MODELLING & CRUISE CONTROL OF A MOBILE MACHINE WITH HYDROSTATIC POWER TRANSMISSION
 I NIMA RASHVAND MODELLING & CRUISE CONTROL OF A MOBILE MACHINE WITH HYDROSTATIC POWER TRANSMISSION MASTER OF SCIENCE THESIS Examiners: Professor Kalevi Huhtala Dr Reza Ghabcheloo The thesis is approved
I NIMA RASHVAND MODELLING & CRUISE CONTROL OF A MOBILE MACHINE WITH HYDROSTATIC POWER TRANSMISSION MASTER OF SCIENCE THESIS Examiners: Professor Kalevi Huhtala Dr Reza Ghabcheloo The thesis is approved
1.1 REMOTELY PILOTED AIRCRAFTS
 CHAPTER 1 1.1 REMOTELY PILOTED AIRCRAFTS Remotely Piloted aircrafts or RC Aircrafts are small model radiocontrolled airplanes that fly using electric motor, gas powered IC engines or small model jet engines.
CHAPTER 1 1.1 REMOTELY PILOTED AIRCRAFTS Remotely Piloted aircrafts or RC Aircrafts are small model radiocontrolled airplanes that fly using electric motor, gas powered IC engines or small model jet engines.
Methodology for Distributed Electric Propulsion Aircraft Control Development with Simulation and Flight Demonstration
 1 Methodology for Distributed Electric Propulsion Aircraft Control Development with Simulation and Flight Demonstration Presented by: Jeff Freeman Empirical Systems Aerospace, Inc. jeff.freeman@esaero.com,
1 Methodology for Distributed Electric Propulsion Aircraft Control Development with Simulation and Flight Demonstration Presented by: Jeff Freeman Empirical Systems Aerospace, Inc. jeff.freeman@esaero.com,
Lecture 5 : Static Lateral Stability and Control. or how not to move like a crab. G. Leng, Flight Dynamics, Stability & Control
 Lecture 5 : Static Lateral Stability and Control or how not to move like a crab 1.0 Lateral static stability Lateral static stability refers to the ability of the aircraft to generate a yawing moment to
Lecture 5 : Static Lateral Stability and Control or how not to move like a crab 1.0 Lateral static stability Lateral static stability refers to the ability of the aircraft to generate a yawing moment to
31 st National Conference on FMFP, December 16-18, 2004, Jadavpur University, Kolkata
 31 st National Conference on FMFP, December 16-18, 24, Jadavpur University, Kolkata Experimental Characterization of Propulsion System for Mini Aerial Vehicle Kailash Kotwani *, S.K. Sane, Hemendra Arya,
31 st National Conference on FMFP, December 16-18, 24, Jadavpur University, Kolkata Experimental Characterization of Propulsion System for Mini Aerial Vehicle Kailash Kotwani *, S.K. Sane, Hemendra Arya,
Formation Flying Experiments on the Orion-Emerald Mission. Introduction
 Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Formation Flying Experiments on the Orion-Emerald Mission Philip Ferguson Jonathan P. How Space Systems Lab Massachusetts Institute of Technology Present updated Orion mission operations Goals & timelines
Caution Notes. Features. Specifications. Installation. A3 3-axis Gyro & Stabilizer User Manual V1.0
 Caution Notes Thank you for choosing our products. If any difficulties are encountered while setting up or operating it, please consult this manual first. For further help, please don t hesitate to contact
Caution Notes Thank you for choosing our products. If any difficulties are encountered while setting up or operating it, please consult this manual first. For further help, please don t hesitate to contact
It s What s Inside that Counts
 It s What s Inside that Counts Drive Basics Adjustable Frequency Drive Description: Solid State Device Controls the Frequency and Voltage Speed Range Depends on the Motor HP Range - Fractional to 10,000
It s What s Inside that Counts Drive Basics Adjustable Frequency Drive Description: Solid State Device Controls the Frequency and Voltage Speed Range Depends on the Motor HP Range - Fractional to 10,000
Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity
 Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity Benoit PARMENTIER, Frederic MONNERIE (PSA) Marc ALIRAND, Julien LAGNIER (LMS) Vehicle Dynamics
Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity Benoit PARMENTIER, Frederic MONNERIE (PSA) Marc ALIRAND, Julien LAGNIER (LMS) Vehicle Dynamics
Modeling, Structural & CFD Analysis and Optimization of UAV
 Modeling, Structural & CFD Analysis and Optimization of UAV Dr Lazaros Tsioraklidis Department of Unified Engineering InterFEA Engineering, Tantalou 7 Thessaloniki GREECE Next Generation tools for UAV
Modeling, Structural & CFD Analysis and Optimization of UAV Dr Lazaros Tsioraklidis Department of Unified Engineering InterFEA Engineering, Tantalou 7 Thessaloniki GREECE Next Generation tools for UAV
DESIGN OF TRANSIENT AND LIMIT CONTROLLER Chap. 5 AIRCRAFT ENGINE CONTROLS
 UNIVERSITY OF SALENTO SCHOOL OF INDUSTRIAL ENGINEERING DEPT. OF ENGINEERING FOR INNOVATION Lecce-Brindisi (Italy) MASTER OF SCIENCE IN AEROSPACE ENGINEERING PROPULSION AND COMBUSTION DESIGN OF TRANSIENT
UNIVERSITY OF SALENTO SCHOOL OF INDUSTRIAL ENGINEERING DEPT. OF ENGINEERING FOR INNOVATION Lecce-Brindisi (Italy) MASTER OF SCIENCE IN AEROSPACE ENGINEERING PROPULSION AND COMBUSTION DESIGN OF TRANSIENT
How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]
![How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]](/thumbs/89/99262679.jpg "How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution]") 1! How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution] !2 How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) Introduction Terminology
1! How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) [Name of the Writer] [Name of the Institution] !2 How To Build An Unmanned Aerial Vehicle/Aircraft System (Drone) Introduction Terminology
AEM 4321 / EE4231 Automatic Control Systems
 AEM 4321 / EE4231 Automatic Control Systems Course Overview 1/31 Outline Course Objectives Applications of Control Examples: Cruise Control and Aircraft Autopilots Terminology Block Diagrams Summary 2/31
AEM 4321 / EE4231 Automatic Control Systems Course Overview 1/31 Outline Course Objectives Applications of Control Examples: Cruise Control and Aircraft Autopilots Terminology Block Diagrams Summary 2/31
for Unmanned Aircraft
 Damage age Tolerant Flight Control o Systems s for Unmanned Aircraft September 17, 28 Vlad Gavrilets, Ph.D. Approved for public release, distribution unlimited Rockwell Collins Control Technologies - Formerly
Damage age Tolerant Flight Control o Systems s for Unmanned Aircraft September 17, 28 Vlad Gavrilets, Ph.D. Approved for public release, distribution unlimited Rockwell Collins Control Technologies - Formerly
Fuzzy based Adaptive Control of Antilock Braking System
 Fuzzy based Adaptive Control of Antilock Braking System Ujwal. P Krishna. S M.Tech Mechatronics, Asst. Professor, Mechatronics VIT University, Vellore, India VIT university, Vellore, India Abstract-ABS
Fuzzy based Adaptive Control of Antilock Braking System Ujwal. P Krishna. S M.Tech Mechatronics, Asst. Professor, Mechatronics VIT University, Vellore, India VIT university, Vellore, India Abstract-ABS
Hybrid VTOL: Increased Energy Density for Increased Payload and Endurance
 Hybrid VTOL: Increased Energy Density for Increased Payload and Endurance Top Flight Airborg 10K H8 with Micro Hybrid Generator Engine Dr. Paul DeBitetto, VP/Software Engineering, paul.debitetto@topflighttech.com,
Hybrid VTOL: Increased Energy Density for Increased Payload and Endurance Top Flight Airborg 10K H8 with Micro Hybrid Generator Engine Dr. Paul DeBitetto, VP/Software Engineering, paul.debitetto@topflighttech.com,
View Numbers and Units
 To demonstrate the usefulness of the Working Model 2-D program, sample problem 16.1was used to determine the forces and accelerations of rigid bodies in plane motion. In this problem a cargo van with a
To demonstrate the usefulness of the Working Model 2-D program, sample problem 16.1was used to determine the forces and accelerations of rigid bodies in plane motion. In this problem a cargo van with a
Blended Winglets on an E-Racer Canard Aircraft
 Blended Winglets on an E-Racer Canard Aircraft Performance Increase? Marc J. Zeitlin / Jack Morrison July 26 th, 2007 2:30 PM 3:45 PM Forum Tent 06 Sporty s Pavilion July 19, 2007 Canard Forum Slide Show
Blended Winglets on an E-Racer Canard Aircraft Performance Increase? Marc J. Zeitlin / Jack Morrison July 26 th, 2007 2:30 PM 3:45 PM Forum Tent 06 Sporty s Pavilion July 19, 2007 Canard Forum Slide Show
Active Driver Assistance for Vehicle Lanekeeping
 Active Driver Assistance for Vehicle Lanekeeping Eric J. Rossetter October 30, 2003 D D L ynamic esign aboratory Motivation In 2001, 43% of all vehicle fatalities in the U.S. were caused by a collision
Active Driver Assistance for Vehicle Lanekeeping Eric J. Rossetter October 30, 2003 D D L ynamic esign aboratory Motivation In 2001, 43% of all vehicle fatalities in the U.S. were caused by a collision
Drones Demystified! Topic: Propulsion Systems
 Drones Demystified! K. Alexis, C. Papachristos, Autonomous Robots Lab, University of Nevada, Reno A. Tzes, Autonomous Robots & Intelligent Systems Lab, NYU Abu Dhabi Drones Demystified! Topic: Propulsion
Drones Demystified! K. Alexis, C. Papachristos, Autonomous Robots Lab, University of Nevada, Reno A. Tzes, Autonomous Robots & Intelligent Systems Lab, NYU Abu Dhabi Drones Demystified! Topic: Propulsion
STICTION/FRICTION IV STICTION/FRICTION TEST 1.1 SCOPE
 Page 1 of 6 STICTION/FRICTION TEST 1.0 STICTION/FRICTION TEST 1.1 SCOPE Static friction (stiction) and dynamic (running) friction between the air bearing surface of sliders in a drive and the corresponding
Page 1 of 6 STICTION/FRICTION TEST 1.0 STICTION/FRICTION TEST 1.1 SCOPE Static friction (stiction) and dynamic (running) friction between the air bearing surface of sliders in a drive and the corresponding
Unmanned Air Vehicles (UAVs): Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos
: Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos") Unmanned Air Vehicles (UAVs): Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos The presenter Dr-Ing Dimitrios E. Mazarakos Dipl. in Mechanical Engineering and
Unmanned Air Vehicles (UAVs): Classification, Legislation and Future applications Presenter: Dr-Ing Dimitrios E. Mazarakos The presenter Dr-Ing Dimitrios E. Mazarakos Dipl. in Mechanical Engineering and
Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon
 1 Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori Nagata, Masashi Koyama (The
1 Deployment and Flight Test of Inflatable Membrane Aeroshell using Large Scientific Balloon Kazuhiko Yamada, Takashi Abe (JAXA/ISAS) Kojiro Suzuki, Naohiko Honma, Yasunori Nagata, Masashi Koyama (The
Clean Sky 2. LifeCraft Demonstrationt (IADP RC 2 & ITDs) Consultation meetings Brussels th December 2012 OUTLINE
 Consultation meetings Brussels th December 2012 OUTLINE") Clean Sky 2 LifeCraft Demonstrationt (IADP RC 2 & ITDs) Consultation meetings Brussels 10-14 th December 2012 1 1 LifeCraft - The Compound Demo OUTLINE Presentation of the Compound R/C Concept Impact &
Clean Sky 2 LifeCraft Demonstrationt (IADP RC 2 & ITDs) Consultation meetings Brussels 10-14 th December 2012 1 1 LifeCraft - The Compound Demo OUTLINE Presentation of the Compound R/C Concept Impact &
30A BLDC ESC. Figure 1: 30A BLDC ESC
 30A BLDC ESC Figure 1: 30A BLDC ESC Introduction This is fully programmable 30A BLDC ESC with 5V, 3A BEC. Can drive motors with continuous 30Amp load current. It has sturdy construction with 2 separate
30A BLDC ESC Figure 1: 30A BLDC ESC Introduction This is fully programmable 30A BLDC ESC with 5V, 3A BEC. Can drive motors with continuous 30Amp load current. It has sturdy construction with 2 separate
Autonomous inverted helicopter flight via reinforcement learning
 Autonomous inverted helicopter flight via reinforcement learning Andrew Y. Ng, Adam Coates, Mark Diel, Varun Ganapathi, Jamie Schulte, Ben Tse, Eric Berger, and Eric Liang By Varun Grover Outline! Helicopter
Autonomous inverted helicopter flight via reinforcement learning Andrew Y. Ng, Adam Coates, Mark Diel, Varun Ganapathi, Jamie Schulte, Ben Tse, Eric Berger, and Eric Liang By Varun Grover Outline! Helicopter
DESIGN AND DEVELOPMENT OF A MICRO AIR VEHICLE (µav) CONCEPT: PROJECT BIDULE
 CONCEPT: PROJECT BIDULE") DESIGN AND DEVELOPMENT OF A MICRO AIR VEHIE (µav) CONCEPT: PROJECT BIDULE Mr T. Spoerry, Dr K.C. Wong School of Aerospace, Mechanical and Mechatronic Engineering University of Sydney NSW 6 Abstract This
DESIGN AND DEVELOPMENT OF A MICRO AIR VEHIE (µav) CONCEPT: PROJECT BIDULE Mr T. Spoerry, Dr K.C. Wong School of Aerospace, Mechanical and Mechatronic Engineering University of Sydney NSW 6 Abstract This
Adapting to Limitations of a Wind Tunnel Test Facility in the Aerodynamic Testing of a new UAV
 Adapting to Limitations of a Wind Tunnel Test Facility in the Aerodynamic Testing of a new UAV Dr K.C. Wong, Mr H.J.H. Peters 1, Mr P. Catarzi 2 School of Aerospace, Mechanical and Mechatronic Engineering
Adapting to Limitations of a Wind Tunnel Test Facility in the Aerodynamic Testing of a new UAV Dr K.C. Wong, Mr H.J.H. Peters 1, Mr P. Catarzi 2 School of Aerospace, Mechanical and Mechatronic Engineering
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Propulsion Systems for Robotics Dr. Kostas Alexis (CSE) Propulsion Systems for Robotics How do I move? Understanding propulsion systems is about knowing how a mobile
Autonomous Mobile Robot Design Topic: Propulsion Systems for Robotics Dr. Kostas Alexis (CSE) Propulsion Systems for Robotics How do I move? Understanding propulsion systems is about knowing how a mobile
ADVENT. Aim : To Develop advanced numerical tools and apply them to optimisation problems in engineering. L. F. Gonzalez. University of Sydney
 ADVENT ADVanced EvolutioN Team University of Sydney L. F. Gonzalez E. J. Whitney K. Srinivas Aim : To Develop advanced numerical tools and apply them to optimisation problems in engineering. 1 2 Outline
ADVENT ADVanced EvolutioN Team University of Sydney L. F. Gonzalez E. J. Whitney K. Srinivas Aim : To Develop advanced numerical tools and apply them to optimisation problems in engineering. 1 2 Outline
aviation week A New Approach To VTOL Page 36 Secure Collaboration On The Internet THE FIGHT OVER F-22 & SPACE TECHNOLOGY Page 53 Page 44
 THE FIGHT OVER F-22 aviation $6.00 JULY 20, 2009 week & SPACE TECHNOLOGY A New Approach To VTOL Page 36 Secure Collaboration On The Internet Page 44 Page 53 AviationWeek.com/awst Page 1 of 1 Print This
THE FIGHT OVER F-22 aviation $6.00 JULY 20, 2009 week & SPACE TECHNOLOGY A New Approach To VTOL Page 36 Secure Collaboration On The Internet Page 44 Page 53 AviationWeek.com/awst Page 1 of 1 Print This
Vehicle Performance. Pierre Duysinx. Research Center in Sustainable Automotive Technologies of University of Liege Academic Year
 Vehicle Performance Pierre Duysinx Research Center in Sustainable Automotive Technologies of University of Liege Academic Year 2015-2016 1 Lesson 4: Fuel consumption and emissions 2 Outline FUEL CONSUMPTION
Vehicle Performance Pierre Duysinx Research Center in Sustainable Automotive Technologies of University of Liege Academic Year 2015-2016 1 Lesson 4: Fuel consumption and emissions 2 Outline FUEL CONSUMPTION
AN ADVANCED COUNTER-ROTATING DISK WING AIRCRAFT CONCEPT Program Update. Presented to NIAC By Carl Grant November 9th, 1999
 AN ADVANCED COUNTER-ROTATING DISK WING AIRCRAFT CONCEPT Program Update Presented to NIAC By Carl Grant November 9th, 1999 DIVERSITECH, INC. Phone: (513) 772-4447 Fax: (513) 772-4476 email: carl.grant@diversitechinc.com
AN ADVANCED COUNTER-ROTATING DISK WING AIRCRAFT CONCEPT Program Update Presented to NIAC By Carl Grant November 9th, 1999 DIVERSITECH, INC. Phone: (513) 772-4447 Fax: (513) 772-4476 email: carl.grant@diversitechinc.com
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics.
 Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
EXPERIMENTAL RESEARCH ON HELICOPTER TAIL SHAKE PHENOMENON
 EXPERIMENTAL RESEARCH ON HELICOPTER TAIL SHAKE PHENOMENON Iskandar Shah Ishak, Shuhaimi Mansor, Tholudin Mat Lazim Department of Aeronautical Engineering, Faculty of Mechanical Engineering, Universiti
EXPERIMENTAL RESEARCH ON HELICOPTER TAIL SHAKE PHENOMENON Iskandar Shah Ishak, Shuhaimi Mansor, Tholudin Mat Lazim Department of Aeronautical Engineering, Faculty of Mechanical Engineering, Universiti
First Civilian Tiltrotor Takes Flight
 The MathWorks Aerospace & Defense Conference Reston, Virginia June 14-15, 15, 2006 First Civilian Tiltrotor Takes Flight 200608-1 David King Bell Helicopter BA609 Analytical Integration Leader RESTRICTED
The MathWorks Aerospace & Defense Conference Reston, Virginia June 14-15, 15, 2006 First Civilian Tiltrotor Takes Flight 200608-1 David King Bell Helicopter BA609 Analytical Integration Leader RESTRICTED
Design, Fabrication and Testing of an Unmanned Aerial Vehicle Catapult Launcher
 ISBN 978-93-84422-40-0 Proceedings of 2015 International Conference on Computing Techniques and Mechanical Engineering (ICCTME 2015) Phuket, October 1-3, 2015, pp. 47-53 Design, Fabrication and Testing
ISBN 978-93-84422-40-0 Proceedings of 2015 International Conference on Computing Techniques and Mechanical Engineering (ICCTME 2015) Phuket, October 1-3, 2015, pp. 47-53 Design, Fabrication and Testing
AT-10 Electric/HF Hybrid VTOL UAS
 AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
AT-10 Electric/HF Hybrid VTOL UAS Acuity Technologies Robert Clark bob@acuitytx.com Summary The AT-10 is a tactical size hybrid propulsion VTOL UAS with a nose camera mount and a large payload bay. Propulsion
Innovating the future of disaster relief
 Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
Innovating the future of disaster relief American Helicopter Society International 33rd Annual Student Design Competition Graduate Student Team Submission VEHICLE OVERVIEW FOUR VIEW DRAWING INTERNAL COMPONENTS
SECTION A DYNAMICS. Attempt any two questions from this section
 SECTION A DYNAMICS Question 1 (a) What is the difference between a forced vibration and a free or natural vibration? [2 marks] (b) Describe an experiment to measure the effects of an out of balance rotating
SECTION A DYNAMICS Question 1 (a) What is the difference between a forced vibration and a free or natural vibration? [2 marks] (b) Describe an experiment to measure the effects of an out of balance rotating
Development of an unmanned aerial vehicle UAV for air quality measurements in urban areas
 Development of an unmanned aerial vehicle UAV for air quality measurements in urban areas Patrick Haas 1, Christophe Balistreri 2, Piero Pontelandolfo 2, Gilles Triscone 3 University of Applied Sciences
Development of an unmanned aerial vehicle UAV for air quality measurements in urban areas Patrick Haas 1, Christophe Balistreri 2, Piero Pontelandolfo 2, Gilles Triscone 3 University of Applied Sciences
Choice of Working Principles As a human-powered device, effort mainly propulsive effort is a key design metric.
 From: Peter Jones To: MECH 3200 12S Students Date: 16 Feb 12 Subject: HW Chap.4b Solution Reference: [1] HW Chap.3 Assignment [2] HW Chap.4a Solution Ref.[1] describes a design problem involving the transport
From: Peter Jones To: MECH 3200 12S Students Date: 16 Feb 12 Subject: HW Chap.4b Solution Reference: [1] HW Chap.3 Assignment [2] HW Chap.4a Solution Ref.[1] describes a design problem involving the transport
SIMULATION OF PROPELLER EFFECT IN WIND TUNNEL
 SIMULATION OF PROPELLER EFFECT IN WIND TUNNEL J. Červinka*, R. Kulhánek*, Z. Pátek*, V. Kumar** *VZLÚ - Aerospace Research and Test Establishment, Praha, Czech Republic **C-CADD, CSIR-NAL, Bangalore, India
SIMULATION OF PROPELLER EFFECT IN WIND TUNNEL J. Červinka*, R. Kulhánek*, Z. Pátek*, V. Kumar** *VZLÚ - Aerospace Research and Test Establishment, Praha, Czech Republic **C-CADD, CSIR-NAL, Bangalore, India
Understanding the benefits of using a digital valve controller. Mark Buzzell Business Manager, Metso Flow Control
 Understanding the benefits of using a digital valve controller Mark Buzzell Business Manager, Metso Flow Control Evolution of Valve Positioners Digital (Next Generation) Digital (First Generation) Analog
Understanding the benefits of using a digital valve controller Mark Buzzell Business Manager, Metso Flow Control Evolution of Valve Positioners Digital (Next Generation) Digital (First Generation) Analog
Model Library Power Transmission
 Model Library Power Transmission The Power Transmission libraries in SimulationX support the efficient modeling and analysis of mechanical powertrains as well as the simulation-based design of controlled
Model Library Power Transmission The Power Transmission libraries in SimulationX support the efficient modeling and analysis of mechanical powertrains as well as the simulation-based design of controlled
THE ULTIMATE DRONE SOLUTION
 THE ULTIMATE DRONE SOLUTION LX-1 ECHELON LiDAR MULTIROTOR Brochure & Technical Specifications OVERVIEW The LX-1 Echelon is a professional-grade hexacopter equipped with a LiDAR sensing payload, and designed
THE ULTIMATE DRONE SOLUTION LX-1 ECHELON LiDAR MULTIROTOR Brochure & Technical Specifications OVERVIEW The LX-1 Echelon is a professional-grade hexacopter equipped with a LiDAR sensing payload, and designed
QuickStick Repeatability Analysis
 QuickStick Repeatability Analysis Purpose This application note presents the variables that can affect the repeatability of positioning using a QuickStick system. Introduction Repeatability and accuracy
QuickStick Repeatability Analysis Purpose This application note presents the variables that can affect the repeatability of positioning using a QuickStick system. Introduction Repeatability and accuracy
General Dynamics F-16 Fighting Falcon
 General Dynamics F-16 Fighting Falcon http://www.globalsecurity.org/military/systems/aircraft/images/f-16c-19990601-f-0073c-007.jpg Adam Entsminger David Gallagher Will Graf AOE 4124 4/21/04 1 Outline
General Dynamics F-16 Fighting Falcon http://www.globalsecurity.org/military/systems/aircraft/images/f-16c-19990601-f-0073c-007.jpg Adam Entsminger David Gallagher Will Graf AOE 4124 4/21/04 1 Outline
BY HOEYCOMB AEROSPACE TECHNOLOGIES. HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV
 BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
BY HOEYCOMB AEROSPACE TECHNOLOGIES HC-330 HYBRID-POWERED ALL- ELECTRICITY DRIVEN four-rotor UAV Content SYSTEM SPECIFICATI- ON TYPICAL USING PROCESS OVERVIEW SUBSYSTEM SPECIFICATI- ON 1 OVERVIEW System
UAV Sky-Y flight loads: a Multi-Disciplinary approach
 UAV Sky-Y flight loads: a Multi-Disciplinary approach Daniele Catelani (MSC) G.M. Carossa, E. Baldassin, R. Digo, E. Marinone, O. Valtingojer (Alenia Aeronautica) 2010 Alenia Aeronautica S.p.A. The contents
UAV Sky-Y flight loads: a Multi-Disciplinary approach Daniele Catelani (MSC) G.M. Carossa, E. Baldassin, R. Digo, E. Marinone, O. Valtingojer (Alenia Aeronautica) 2010 Alenia Aeronautica S.p.A. The contents
Universal Fluid Power Trainer (UFPT)
") Universal Fluid Power Trainer (UFPT) The UFPT is a modular, smart and unique fluid power and motion control training unit. It contains an excellent integration of industrial-graded hardware and builtin
Universal Fluid Power Trainer (UFPT) The UFPT is a modular, smart and unique fluid power and motion control training unit. It contains an excellent integration of industrial-graded hardware and builtin
Preface. Acknowledgments. List of Tables. Nomenclature: organizations. Nomenclature: acronyms. Nomenclature: main symbols. Nomenclature: Greek symbols
 Contents Preface Acknowledgments List of Tables Nomenclature: organizations Nomenclature: acronyms Nomenclature: main symbols Nomenclature: Greek symbols Nomenclature: subscripts/superscripts Supplements
Contents Preface Acknowledgments List of Tables Nomenclature: organizations Nomenclature: acronyms Nomenclature: main symbols Nomenclature: Greek symbols Nomenclature: subscripts/superscripts Supplements
Part II. HISTORICAL AND ENGINEERING ANALYSIS OF AIRSHIP PLAN-AND- DESIGN AND SERVICE DECISIONS
 CONTENTS MONOGRAPHER S FOREWORD DEFENITIONS, SYMBOLS, ABBREVIATIONS, AND INDICES Part I. LAWS AND RULES OF AEROSTATIC FLIGHT PRINCIPLE Chapter 1. AIRCRAFT FLIGHT PRINCIPLE 1.1 Flight Principle Classification
CONTENTS MONOGRAPHER S FOREWORD DEFENITIONS, SYMBOLS, ABBREVIATIONS, AND INDICES Part I. LAWS AND RULES OF AEROSTATIC FLIGHT PRINCIPLE Chapter 1. AIRCRAFT FLIGHT PRINCIPLE 1.1 Flight Principle Classification
Driving dynamics and hybrid combined in the torque vectoring
 Driving dynamics and hybrid combined in the torque vectoring Concepts of axle differentials with hybrid functionality and active torque distribution Vehicle Dynamics Expo 2009 Open Technology Forum Dr.
Driving dynamics and hybrid combined in the torque vectoring Concepts of axle differentials with hybrid functionality and active torque distribution Vehicle Dynamics Expo 2009 Open Technology Forum Dr.
DRONE & UAV.
 www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
www.erapkorea.co.kr DRONE & UAV Extended flight time Proven to be reliable, safe and easy to use Various fields of operation Completely autonomous, and manually controlled ERAP DRONE & UAV WHY ERAP s MAPPING
Demonstration Program to Design, Manufacture and Test an Autonomous Electro-Hydrostatic Actuator to Gimbal Large Booster-Class Engines
 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit 9-12 July 2006, Sacramento, California AIAA 2006-4364 Demonstration Program to Design, Manufacture and Test an Autonomous Electro-Hydrostatic
42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit 9-12 July 2006, Sacramento, California AIAA 2006-4364 Demonstration Program to Design, Manufacture and Test an Autonomous Electro-Hydrostatic
w w w. o n e r a. f r
 www. onera. fr Pioneering concepts for Personal Air Transport Systems PPlane Project AMPERE Project Hybrid electrical propulsion study PPlane : a pioneering concept for Personal Air Transport Systems The
www. onera. fr Pioneering concepts for Personal Air Transport Systems PPlane Project AMPERE Project Hybrid electrical propulsion study PPlane : a pioneering concept for Personal Air Transport Systems The
Skycar Flight Control System Overview By Bruce Calkins August 14, 2012
 Skycar Flight Control System Overview By Bruce Calkins August 14, 2012 Introduction The Skycar is a new type of personal aircraft that will rely on directed thrust produced by its engines to enable various
Skycar Flight Control System Overview By Bruce Calkins August 14, 2012 Introduction The Skycar is a new type of personal aircraft that will rely on directed thrust produced by its engines to enable various
STRUCTURAL DESIGN AND ANALYSIS OF ELLIPTIC CYCLOCOPTER ROTOR BLADES
 16 TH INTERNATIONAL CONFERENCE ON COMPOSITE MATERIALS STRUCTURAL DESIGN AND ANALYSIS OF ELLIPTIC CYCLOCOPTER ROTOR BLADES In Seong Hwang 1, Seung Yong Min 1, Choong Hee Lee 1, Yun Han Lee 1 and Seung Jo
16 TH INTERNATIONAL CONFERENCE ON COMPOSITE MATERIALS STRUCTURAL DESIGN AND ANALYSIS OF ELLIPTIC CYCLOCOPTER ROTOR BLADES In Seong Hwang 1, Seung Yong Min 1, Choong Hee Lee 1, Yun Han Lee 1 and Seung Jo
VR-Design Studio Car Physics Engine
 VR-Design Studio Car Physics Engine Contents Introduction I General I.1 Model I.2 General physics I.3 Introduction to the force created by the wheels II The Engine II.1 Engine RPM II.2 Engine Torque II.3
VR-Design Studio Car Physics Engine Contents Introduction I General I.1 Model I.2 General physics I.3 Introduction to the force created by the wheels II The Engine II.1 Engine RPM II.2 Engine Torque II.3
Electric Penguin s philosophy:
 UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
UNMANNED PLATFORMS AND SUBSYSTEMS Datasheet v 1.1 Penguin BE Electric Unmanned Platform Up to 110 minutes of endurance 2 with 2.8 kg payload 23 liters of payload volume Quick replaceable battery cartridge
Large Low-speed Facility (LLF)
") Large Low-speed Facility (LLF) About us The Foundation DNW (German-Dutch Wind Tunnels) was established in 1976 by the Dutch National Aerospace Laboratory (NLR) and the German Aerospace Center (DLR), as
Large Low-speed Facility (LLF) About us The Foundation DNW (German-Dutch Wind Tunnels) was established in 1976 by the Dutch National Aerospace Laboratory (NLR) and the German Aerospace Center (DLR), as
Introduction. Fuselage/Cockpit
 Introduction The Moravan Zlin 242L is a fully aerobatic 2 seat aircraft designed to perform all advanced flight maneuvers within an envelope of -3.5 to +6 Gs. Many military and civilian flight-training
Introduction The Moravan Zlin 242L is a fully aerobatic 2 seat aircraft designed to perform all advanced flight maneuvers within an envelope of -3.5 to +6 Gs. Many military and civilian flight-training
Aerial robots that interact with the environment
 Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
Aerial robots that interact with the environment Guillermo Heredia*, Aníbal Ollero * Professor at University of Seville, Spain Robotics, Vision and Control group (GRVC) guiller@us.es Robotics, Vision and
UAV KF-1 helicopter. CopterCam UAV KF-1 helicopter specification
 UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
UAV KF-1 helicopter The provided helicopter is a self-stabilizing unmanned mini-helicopter that can be used as an aerial platform for several applications, such as aerial filming, photography, surveillance,
ELECTRIC POWER TRAINS THE KEY ENABLER FOR CONTRA ROTATING PROPELLERS IN GENERAL AVIATION (& VICE VERSA)
") ELECTRIC POWER TRAINS THE KEY ENABLER FOR CONTRA ROTATING PROPELLERS IN GENERAL AVIATION (& VICE VERSA) ATI D3 EVENT 8 TH MAY 2018 THE EMERGENCE OF ELECTRIFICATION IN AEROSPACE NICK SILLS, CONTRA ELECTRIC
ELECTRIC POWER TRAINS THE KEY ENABLER FOR CONTRA ROTATING PROPELLERS IN GENERAL AVIATION (& VICE VERSA) ATI D3 EVENT 8 TH MAY 2018 THE EMERGENCE OF ELECTRIFICATION IN AEROSPACE NICK SILLS, CONTRA ELECTRIC
Multi-Body Simulation of Powertrain Acoustics in the Full Vehicle Development
 Page 1 Multi-Body Simulation of Powertrain Acoustics in the Full Vehicle Development SIMPACK User Meeting 2011 Alexander Schmid, IABG mbh Andreas Raith, BMW Group Salzburg, Page 2 Powertrain Acoustics
Page 1 Multi-Body Simulation of Powertrain Acoustics in the Full Vehicle Development SIMPACK User Meeting 2011 Alexander Schmid, IABG mbh Andreas Raith, BMW Group Salzburg, Page 2 Powertrain Acoustics
SPMM OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000?
 SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
AIRCRAFT BRAKE TESTING
 AIRCRAFT BRAKE TESTING ALPA 52 nd Annual Air Safety Forum Captain John E. Cashman Director Flight Crew Operations The Boeing Company Agenda Terminology Certified vs. Advisory data Brake testing (Lab and
AIRCRAFT BRAKE TESTING ALPA 52 nd Annual Air Safety Forum Captain John E. Cashman Director Flight Crew Operations The Boeing Company Agenda Terminology Certified vs. Advisory data Brake testing (Lab and
Research in hydraulic brake components and operational factors influencing the hysteresis losses
 Research in hydraulic brake components and operational factors influencing the hysteresis losses Shreyash Balapure, Shashank James, Prof.Abhijit Getem ¹Student, B.E. Mechanical, GHRCE Nagpur, India, ¹Student,
Research in hydraulic brake components and operational factors influencing the hysteresis losses Shreyash Balapure, Shashank James, Prof.Abhijit Getem ¹Student, B.E. Mechanical, GHRCE Nagpur, India, ¹Student,
Bild : Bernhard Mühr German Aerospace Center Flight Operations
 German Aerospace Center Flight Operations Bild : Bernhard Mühr www.wolkenatlas.de Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes
German Aerospace Center Flight Operations Bild : Bernhard Mühr www.wolkenatlas.de Introduction DLR is Germany s aerospace research center and space agency with about 4700 employees in 31 research institutes
DYNAMICS OF A VERTICAL TAKEOFF AND LANDING (VTOL) UNMANNED AERIAL VEHICLE (UAV)
 UNMANNED AERIAL VEHICLE (UAV)") DYNAMICS OF A VERTICAL TAKEOFF AND LANDING (VTOL) UNMANNED AERIAL VEHICLE (UAV) Alvaro Vargas-Clara, Arizona State University; Sangram Redkar, Arizona state University Abstract The objective of this work
DYNAMICS OF A VERTICAL TAKEOFF AND LANDING (VTOL) UNMANNED AERIAL VEHICLE (UAV) Alvaro Vargas-Clara, Arizona State University; Sangram Redkar, Arizona state University Abstract The objective of this work
Development of an Extended Range, Large Caliber, Modular Payload Projectile
 1 Development of an Extended Range, Large Caliber, Modular Payload Projectile April 12th, 2011 Miami, Florida, USA 46 th Annual Gun & Missile Systems Conference & Exhibition Speaker: Pierre-Antoine Rainville
1 Development of an Extended Range, Large Caliber, Modular Payload Projectile April 12th, 2011 Miami, Florida, USA 46 th Annual Gun & Missile Systems Conference & Exhibition Speaker: Pierre-Antoine Rainville
Flight Research using Radio-controlled Small Airplanes
 Flight Research using Radio-controlled Small Airplanes S P Govinda Raju S P Govinda Raju is a Professor at the Aerospace Engineering Department, Indian Institute of Science, Bangalore. His interests are
Flight Research using Radio-controlled Small Airplanes S P Govinda Raju S P Govinda Raju is a Professor at the Aerospace Engineering Department, Indian Institute of Science, Bangalore. His interests are
Parameter Design and Tuning Tool for Electric Power Steering System
 TECHNICL REPORT Parameter Design and Tuning Tool for Electric Power Steering System T. TKMTSU T. TOMIT Installation of Electric Power Steering systems (EPS) for automobiles has expanded rapidly in the
TECHNICL REPORT Parameter Design and Tuning Tool for Electric Power Steering System T. TKMTSU T. TOMIT Installation of Electric Power Steering systems (EPS) for automobiles has expanded rapidly in the
Preliminary Study on Quantitative Analysis of Steering System Using Hardware-in-the-Loop (HIL) Simulator
 Simulator") TECHNICAL PAPER Preliminary Study on Quantitative Analysis of Steering System Using Hardware-in-the-Loop (HIL) Simulator M. SEGAWA M. HIGASHI One of the objectives in developing simulation methods is to
TECHNICAL PAPER Preliminary Study on Quantitative Analysis of Steering System Using Hardware-in-the-Loop (HIL) Simulator M. SEGAWA M. HIGASHI One of the objectives in developing simulation methods is to
CONTENTS Duct Jet Propulsion / Rocket Propulsion / Applications of Rocket Propulsion / 15 References / 25
 CONTENTS PREFACE xi 1 Classification 1.1. Duct Jet Propulsion / 2 1.2. Rocket Propulsion / 4 1.3. Applications of Rocket Propulsion / 15 References / 25 2 Definitions and Fundamentals 2.1. Definition /
CONTENTS PREFACE xi 1 Classification 1.1. Duct Jet Propulsion / 2 1.2. Rocket Propulsion / 4 1.3. Applications of Rocket Propulsion / 15 References / 25 2 Definitions and Fundamentals 2.1. Definition /
VAST AUAV (Variable AirSpeed Telescoping Additive Unmanned Air Vehicle)
") VAST AUAV (Variable AirSpeed Telescoping Additive Unmanned Air Vehicle) Michael Stern & Eli Cohen MIT Lincoln Laboratory RAPID 2013 June 11 th, 2013 This work is sponsored by the Air Force under Air Force
VAST AUAV (Variable AirSpeed Telescoping Additive Unmanned Air Vehicle) Michael Stern & Eli Cohen MIT Lincoln Laboratory RAPID 2013 June 11 th, 2013 This work is sponsored by the Air Force under Air Force
SPMM OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000?
 SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SONIC PROPULSION SYSTEM, AN OVERALL VIEW OF POSSIBLE SOLUTIONS
 SONIC PROPULSION SYSTEM, AN OVERALL VIEW OF POSSIBLE SOLUTIONS Horia Abaitancei *, Dan Abaitancei, Gheorghe-Alexandru Radu, Sebastian Radu, Mihaela Coldea, Alexandru Lupa Transilvania University of Brasov
SONIC PROPULSION SYSTEM, AN OVERALL VIEW OF POSSIBLE SOLUTIONS Horia Abaitancei *, Dan Abaitancei, Gheorghe-Alexandru Radu, Sebastian Radu, Mihaela Coldea, Alexandru Lupa Transilvania University of Brasov
Full-Scale 1903 Wright Flyer Wind Tunnel Test Results From the NASA Ames Research Center
 Full-Scale 1903 Wright Flyer Wind Tunnel Test Results From the NASA Ames Research Center Henry R. Jex, Jex Enterprises, Santa Monica, CA Richard Grimm, Northridge, CA John Latz, Lockheed Martin Skunk Works,
Full-Scale 1903 Wright Flyer Wind Tunnel Test Results From the NASA Ames Research Center Henry R. Jex, Jex Enterprises, Santa Monica, CA Richard Grimm, Northridge, CA John Latz, Lockheed Martin Skunk Works,
Aero Engine Round Table, 30 May
 Aero Engine Round Table, 30 May 2018 1 Aero Engine Round Table NAG, DGTA, NLR, 30 May 2018 NLR in brief One-stop-shop Global player with Dutch roots >95 99 years young Amsterdam, Marknesse, Schiphol Innovative,
Aero Engine Round Table, 30 May 2018 1 Aero Engine Round Table NAG, DGTA, NLR, 30 May 2018 NLR in brief One-stop-shop Global player with Dutch roots >95 99 years young Amsterdam, Marknesse, Schiphol Innovative,
Unmanned Aerial Vehicle Design, Development, and Implementation
 Unmanned Aerial Vehicle Design, Development, and Implementation Faculty Advisor Dr. David Schmidt Team Members Patrick Herklotz, Shane Kirkbride, Mike Kopps, Mark Kraska, John Ordeman, Erica Rygg, Matt
Unmanned Aerial Vehicle Design, Development, and Implementation Faculty Advisor Dr. David Schmidt Team Members Patrick Herklotz, Shane Kirkbride, Mike Kopps, Mark Kraska, John Ordeman, Erica Rygg, Matt
Cable Dragging Horizontal Takeoff Spacecraft Air Launch System
 Cable Dragging Horizontal Takeoff Spacecraft Air Launch System Author: Zhixian Lin December 31, 2017 i Contents Abstract...ii 1. Cable Dragging Horizontal Takeoff Spacecraft Air Launch System... 1 2. The
Cable Dragging Horizontal Takeoff Spacecraft Air Launch System Author: Zhixian Lin December 31, 2017 i Contents Abstract...ii 1. Cable Dragging Horizontal Takeoff Spacecraft Air Launch System... 1 2. The
PROPELLERS COMPARATIVE TESTS on WT9 Dynamic tow aircraft
 Page : 1 / 5 PROPELLERS COMPARATIVE TESTS December 2006 : the WT9 Dynamic ultralight is tested and validated by DGAC (Direction Générale de l'aviation Civile = French Civil Aviation Authority) as tow aircraft.
Page : 1 / 5 PROPELLERS COMPARATIVE TESTS December 2006 : the WT9 Dynamic ultralight is tested and validated by DGAC (Direction Générale de l'aviation Civile = French Civil Aviation Authority) as tow aircraft.
Aircraft Design Conceptual Design
 Université de Liège Département d Aérospatiale et de Mécanique Aircraft Design Conceptual Design Ludovic Noels Computational & Multiscale Mechanics of Materials CM3 http://www.ltas-cm3.ulg.ac.be/ Chemin
Université de Liège Département d Aérospatiale et de Mécanique Aircraft Design Conceptual Design Ludovic Noels Computational & Multiscale Mechanics of Materials CM3 http://www.ltas-cm3.ulg.ac.be/ Chemin