Fall Professor Kyongsu Yi VDCL Vehicle Dynamics and Control Laboratory Seoul National University
|
|
|
- Christiana Eaton
- 5 years ago
- Views:
Transcription
1 System Control Fall 2010 Professor Kyongsu Yi 2010 VDCL Vehicle Dynamics and Control Laboratory Seoul National University
2 Lecture 1: Course Overview Instructor: Lectures: Professor Kyongsu Yi Tel: Mo/We Office hours: Tu 11:00 to 12:00 or by appointment 2
3 Lecture 1: Objective: To provide an overview of system control, basic concepts, controller design methods and applications to engineering systems Mathematical model, analysis and prediction of the dynamics of systems, state equation and system stability, linear control systems, PID control, controller design in the frequency and time domains 3

4 Lecture 1: Grading: Homework 15%, Class attendance 10% Midterm Exam 30%, Final exam 45% Students absent in a class without instructor s permission prior to the class would be failed. Homework: Students will turn in before the end of the class on the due date. Late homework will not be accepted. All homework assignments are to be completed on your own. You are allowed to consult with other students during the conceptualization of a problem but all written and programming work are to be generated by yourself. 4



5 Lecture 1: Exam: 75-minute midterm exam on October 18 (Mo) in class, 15:30-16:45 16: minute final exam on December 13 (Mo) in class, 15:30-17:
6 Major Course Contents In this course we will learn how to model and control engineering systems. Key issues are: Understanding the underlying physics and being able to construct models and design controllers to analyze, predict and control engineering systems. 6
7 References 1. K. Ogata, Modern control engineering, 5 th ed., Prentice Hall, G. Franklin et al., Feedback control of dynamic systems, 6 th ed., Prentice Hall, S. Shinners, Modern control system theory and design, Wiley interscience, i W. Palm, System dynamics, 2 nd ed., McGraw-Hill,,
8 Weekly Plan Week Topics comments 1 Introduction, some examples of control systems 2 Components of a control system, modeling, Laplace transform 3 Transfer functions 4 Stability, step response, Routh's criterion 5 Sensitivity, disturbance rejection 6 Control design examples 7 Root locus, lead and lag compensation 8 Review and Midterm Midterm 9 Introduction to frequency response; interpretation, bode plots 10 Nyquist criterion, applications, gain and phase margins 11 Design specs via loop gain, compensation, design from L 12 Bode gain-phase relation, design case study Design 13 Control system design example Design 14 Control system design example Design 15 Control term project presentation Design example 16 Review and Final Final Exam 8
9 Control Systems 9
10 Early historical control of liquid level and flow Feedback Control of Dynamic Systems, Sixth Edition Gene F. Franklin J. David Powell Abbas Emami-Naeini Copyright 2010, 1999, 1989 by Pearson Education, Inc. All rights reserved.
11 Drebbel s incubator for hatching chicken eggs Source: Adapted from Mayr, 1970 Feedback Control of Dynamic Systems, Sixth Edition Gene F. Franklin J. David Powell Abbas Emami-Naeini Copyright 2010, 1999, 1989 by Pearson Education, Inc. All rights reserved.




12 the fly-ball governor Source: British Crown Copyright, Science Museum, London Feedback Control of Dynamic Systems, Sixth Edition Gene F. Franklin J. David Powell Abbas Emami-Naeini Copyright 2010, 1999, 1989 by Pearson Education, Inc. All rights reserved.
13 Operating parts of a fly-ball governor Feedback Control of Dynamic Systems, Sixth Edition Gene F. Franklin J. David Powell Abbas Emami-Naeini Copyright 2010, 1999, 1989 by Pearson Education, Inc. All rights reserved.
14 Component block diagram of an elementary feedback control Feedback Control of Dynamic Systems, Sixth Edition Gene F. Franklin J. David Powell Abbas Emami-Naeini Copyright 2010, 1999, 1989 by Pearson Education, Inc. All rights reserved.




15 Automated Highway Systems (AHS), 1997 UC Berkeley PATH AHS lanes will have three times the capacity of regular highway lanes - Vehicles will travel together in closely-packed platoons. Dedicated to automated vehicles - regular passenger cars will have to be specially instrumented to travel on AHS lanes. Seoul National University

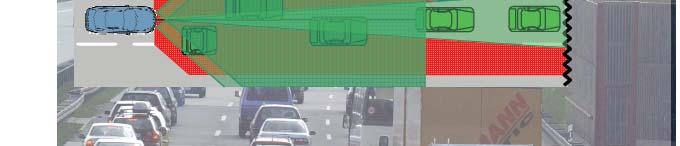




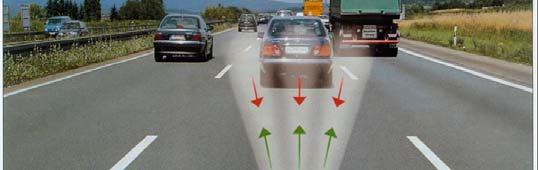

16 Full-range ACC/CA Seoul National University 16
17 The infrared ranging system Continental Car Safety for tailgater 2009 Volvo XC60 20 ft sweep with three infrared beams The greatest danger for accidents is in normal city driving- 75% of rear end collisions occur between vehicles traveling at less than 20 mph. Seoul National University 17
18 Component block diagram of automobile cruise control Feedback Control of Dynamic Systems, Sixth Edition Gene F. Franklin J. David Powell Abbas Emami-Naeini Copyright 2010, 1999, 1989 by Pearson Education, Inc. All rights reserved.
19 ESC Electronic Stability Control 19









20 Z F Z Spin axis Direction of Wheel heading X Slip angle Y α λ Slip ratio Direction of Wheel travel V 20







21 ESC: 4 wheel independent braking Can you brake hard on the front wheel, softly on the back left wheel and, at the same time, accelerate the back right wheel to stop the rear of your car losing control in a bend? Seoul National University 21
 a standard for all the manufactured vehicles by Mercedes Benz since 2002 it is")

22 VSC (Vehicle Stability Control) An innovative safety system Actively supporting the driver Enhanced driving stability in situations with critical vehicle dynamics VSC (Vehicle Stability Control) a standard for all the manufactured vehicles by Mercedes Benz since 2002 it is mandated dby legislation l i that all vehicles should be equipped with ESC in 2012 in USA. VSC, an active safety system, can significantly increase vehicle safety and projected 5,300 to 9,600 highway deaths annually can be prevented by 100% fitment of VSC. Seoul National University 22
")
23 ESP (Electronic Stability Program) 23

 F F cos F")
 F R ( =1) F S ( 0 ) F S =F")
 x M yaw ( =0) F S l( =0) a")

 2 y l( 0 ) b")
24 Unified Chassis Control (UCC) - Vehicle Lateral Motion (Dynamic Equations) 0 v VWheel 0 Wh mv ( v) F F cos F sin x y xr xf f yf f F B ( 0 ) F R ( =1) F S ( 0 ) F S =F R ( =0) F R ( 0 ) 0 M yaw ( 0 ) x M yaw ( =0) F S l( =0) a mv ( v ) F F cos F sin y x yr yf f xf f I l F cos l F l F sin... z f yf f r yr f xf f d ( Fxr Fxf cos f) 2 y l( 0 ) b F S F S
25 Vehicle Stability Control Systems Steering wheel Brake Pedal Wheel
26 Vehicle-Driver Systems Reference Human Driver Driver Inputs Vehicle Vehicle motion Throttle brake steering 26
27 Vehicle-Driver Systems Environments World model Reference Human Driver Driver Inputs Vehicle Vehicle motion Throttle brake steering 27



28 Vehicle-Driver-Control Systems Environments World model Reference Human Driver Driver Inputs Vehicle Vehicle motion Intelligent Driver Assistance Systems 28
29 Total Number of Control Module=76 29
30 END of Course Overview 30
기계시스템해석 System Dynamics/System Analysis
 기계시스템해석 System Dynamics/System Analysis Spring 2015 Professor Kyongsu Yi 2015 VDCL Vehicle Dynamics Control Laboratory Department of Mechanical Engineering Seoul National University Introduction Instructor:
기계시스템해석 System Dynamics/System Analysis Spring 2015 Professor Kyongsu Yi 2015 VDCL Vehicle Dynamics Control Laboratory Department of Mechanical Engineering Seoul National University Introduction Instructor:
Vhil Vehicle Dynamics and dcontrol
 Vhil Vehicle Dynamics and dcontrol Fall 2010 Professor Kyongsu Yi 2010 IVCL/VDC Lecture 1: Introduction Instructor: Professor Kyongsu Yi 301-1502 Tel: 1941 Email:kyi@snu.ac.kr http://vdcl.snu.ac.kr Lectures:
Vhil Vehicle Dynamics and dcontrol Fall 2010 Professor Kyongsu Yi 2010 IVCL/VDC Lecture 1: Introduction Instructor: Professor Kyongsu Yi 301-1502 Tel: 1941 Email:kyi@snu.ac.kr http://vdcl.snu.ac.kr Lectures:
University Of California, Berkeley Department of Mechanical Engineering. ME 131 Vehicle Dynamics & Control (4 units)
") CATALOG DESCRIPTION University Of California, Berkeley Department of Mechanical Engineering ME 131 Vehicle Dynamics & Control (4 units) Undergraduate Elective Syllabus Physical understanding of automotive
CATALOG DESCRIPTION University Of California, Berkeley Department of Mechanical Engineering ME 131 Vehicle Dynamics & Control (4 units) Undergraduate Elective Syllabus Physical understanding of automotive
Academic Course Description
 BEE305- ELECTRICAL MACHINES Academic Course Description BHARATH UNIVERSITY Faculty of Engineering and Technology Department of Electrical and Electronics Engineering BEE305- ELECTRICAL MACHINES Third Semester,
BEE305- ELECTRICAL MACHINES Academic Course Description BHARATH UNIVERSITY Faculty of Engineering and Technology Department of Electrical and Electronics Engineering BEE305- ELECTRICAL MACHINES Third Semester,
Lecture (1) on. Basics of Hydraulic Control. By Dr. Emad M. Saad Industrial Engineering Dept. Faculty of Engineering Fayoum University
 on. Basics of Hydraulic Control. By Dr. Emad M. Saad Industrial Engineering Dept. Faculty of Engineering Fayoum University") 1 Lecture (1) on Basics of Hydraulic Control Tanta University By Dr. Emad M. Saad Industrial Engineering Dept. Faculty of Engineering Fayoum University Faculty of Engineering Mechanical power Engineering
1 Lecture (1) on Basics of Hydraulic Control Tanta University By Dr. Emad M. Saad Industrial Engineering Dept. Faculty of Engineering Fayoum University Faculty of Engineering Mechanical power Engineering
Modeling, Design and Simulation of Active Suspension System Root Locus Controller using Automated Tuning Technique.
 Modeling, Design and Simulation of Active Suspension System Root Locus Controller using Automated Tuning Technique. Omorodion Ikponwosa Ignatius Obinabo C.E Abstract Evbogbai M.J.E. Car suspension system
Modeling, Design and Simulation of Active Suspension System Root Locus Controller using Automated Tuning Technique. Omorodion Ikponwosa Ignatius Obinabo C.E Abstract Evbogbai M.J.E. Car suspension system
COURSE NUMBER & COURSE TITLE: ME 300 Fundamentals of Internal Combustion Engine
 COURSE NUMBER & COURSE TITLE: ME 300 Fundamentals of Internal Combustion Engine INSTRUCTOR: Xingcai Lu, Xinqi Credits: 3 Qiao REQUIRED COURSE OR ELECTIVE COURSE: Required COURSE STRUCTURE/SCHEDULE: 1.
COURSE NUMBER & COURSE TITLE: ME 300 Fundamentals of Internal Combustion Engine INSTRUCTOR: Xingcai Lu, Xinqi Credits: 3 Qiao REQUIRED COURSE OR ELECTIVE COURSE: Required COURSE STRUCTURE/SCHEDULE: 1.
ME2302 DYNAMICS OF MACHINERY UNIT I FORCE ANALYSIS AND FLYWHEELS 12
 ME2302 DYNAMICS OF MACHINERY L T P C 3 1 0 4 UNIT I FORCE ANALYSIS AND FLYWHEELS 12 Static force analysis of mechanisms D Alemberts principle - Inertia force and Inertia torque Dynamic force analysis -
ME2302 DYNAMICS OF MACHINERY L T P C 3 1 0 4 UNIT I FORCE ANALYSIS AND FLYWHEELS 12 Static force analysis of mechanisms D Alemberts principle - Inertia force and Inertia torque Dynamic force analysis -
Modeling, Design and Simulation of Active Suspension System Frequency Response Controller using Automated Tuning Technique
 Modeling, Design and Simulation of Active Suspension System Frequency Response Controller using Automated Tuning Technique Omorodion Ikponwosa Ignatius Obinabo C.E Evbogbai M.J.E. Abstract Car suspension
Modeling, Design and Simulation of Active Suspension System Frequency Response Controller using Automated Tuning Technique Omorodion Ikponwosa Ignatius Obinabo C.E Evbogbai M.J.E. Abstract Car suspension
EE 2006 Electric Circuit Analysis Spring January 21, 2015 Lecture 01
 EE 2006 Electric Circuit Analysis Spring 2015 January 21, 2015 Lecture 01 Lecture Outline Course Introduction Lab information Basic concepts: charge, current, voltage 2 Instructor: Jing Bai Associate Professor
EE 2006 Electric Circuit Analysis Spring 2015 January 21, 2015 Lecture 01 Lecture Outline Course Introduction Lab information Basic concepts: charge, current, voltage 2 Instructor: Jing Bai Associate Professor
YMCA UNIVERSITY OF SCIENCE AND TECHNOLOGY, FARIDABAD SCHEME OF STUDIES & EXAMINATIONS B.TECH 3 rd YEAR (SEMESTER V) ELECTRICAL ENGINEERING ( )
 ELECTRICAL ENGINEERING ( )") YMCA UNIVERSITY OF SCIENCE AND TECHNOLOGY, FARIDABAD SCHEME OF STUDIES & EXAMINATIONS B.TECH 3 rd YEAR (SEMESTER V) ELECTRICAL ENGINEERING (2017-18) Sl.No. Course code. Course Title L T P Credits CAT code
YMCA UNIVERSITY OF SCIENCE AND TECHNOLOGY, FARIDABAD SCHEME OF STUDIES & EXAMINATIONS B.TECH 3 rd YEAR (SEMESTER V) ELECTRICAL ENGINEERING (2017-18) Sl.No. Course code. Course Title L T P Credits CAT code
Vehicle Dynamics and Drive Control for Adaptive Cruise Vehicles
 Vehicle Dynamics and Drive Control for Adaptive Cruise Vehicles Dileep K 1, Sreepriya S 2, Sreedeep Krishnan 3 1,3 Assistant Professor, Dept. of AE&I, ASIET Kalady, Kerala, India 2Associate Professor,
Vehicle Dynamics and Drive Control for Adaptive Cruise Vehicles Dileep K 1, Sreepriya S 2, Sreedeep Krishnan 3 1,3 Assistant Professor, Dept. of AE&I, ASIET Kalady, Kerala, India 2Associate Professor,
Inquiry-Based Physics in Middle School. David E. Meltzer
 Inquiry-Based Physics in Middle School David E. Meltzer Mary Lou Fulton Teachers College Arizona State University Mesa, Arizona U.S.A. Supported in part by a grant from Mary Lou Fulton Teachers College
Inquiry-Based Physics in Middle School David E. Meltzer Mary Lou Fulton Teachers College Arizona State University Mesa, Arizona U.S.A. Supported in part by a grant from Mary Lou Fulton Teachers College
TME102 Vehicle Dynamics, Advanced
 TME102 Vehicle Dynamics, Advanced Course Information 2016, Sp 4 160318 Examiner, Lecturer, Teaching Assistant Mathias Lidberg, tel 031-7721535, e-post: mathias.lidberg@chalmers.se Lecturer Manjurul Islam,
TME102 Vehicle Dynamics, Advanced Course Information 2016, Sp 4 160318 Examiner, Lecturer, Teaching Assistant Mathias Lidberg, tel 031-7721535, e-post: mathias.lidberg@chalmers.se Lecturer Manjurul Islam,
Nilsson Riedel Electric Circuits Solution 9th
 NILSSON RIEDEL ELECTRIC CIRCUITS SOLUTION 9TH PDF - Are you looking for nilsson riedel electric circuits solution 9th Books? Now, you will be happy that at this time nilsson riedel electric circuits solution
NILSSON RIEDEL ELECTRIC CIRCUITS SOLUTION 9TH PDF - Are you looking for nilsson riedel electric circuits solution 9th Books? Now, you will be happy that at this time nilsson riedel electric circuits solution
Syllabus: Automated, Connected, and Intelligent Vehicles
 Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Page 1 of 8 Syllabus: Automated, Connected, and Intelligent Vehicles Part 1: Course Information Description: Automated, Connected, and Intelligent Vehicles is an advanced automotive technology course that
Using MATLAB/ Simulink in the designing of Undergraduate Electric Machinery Courses
 Using MATLAB/ Simulink in the designing of Undergraduate Electric Machinery Courses Mostafa.A. M. Fellani, Daw.E. Abaid * Control Engineering department Faculty of Electronics Technology, Beni-Walid, Libya
Using MATLAB/ Simulink in the designing of Undergraduate Electric Machinery Courses Mostafa.A. M. Fellani, Daw.E. Abaid * Control Engineering department Faculty of Electronics Technology, Beni-Walid, Libya
Academic Course Description
 BME 503 FLUID POWER SYSTEMS Academic Course Description BHARATH UNIVERSITY Faculty of Engineering and Technology Department of Mechanical Engineering BME 503 FLUID POWER SYSTEMS Fifth Semester, 2015-16
BME 503 FLUID POWER SYSTEMS Academic Course Description BHARATH UNIVERSITY Faculty of Engineering and Technology Department of Mechanical Engineering BME 503 FLUID POWER SYSTEMS Fifth Semester, 2015-16
ELEC 585/462 MOTOR DRIVE DYNAMICS COURSE OUTLINE & ASSESSMENT TECHNIQUES SEPT- DEC / FALL 2013 CRN 11254/11246
 ELEC 585/462 MOTOR DRIVE DYNAMICS COURSE OUTLINE & ASSESSMENT TECHNIQUES SEPT- DEC / FALL 2013 CRN 11254/11246 Instructor: Office Hours: Dr. S. Nandi Days: Any time by appointment Phone: 721-8679 Location:
ELEC 585/462 MOTOR DRIVE DYNAMICS COURSE OUTLINE & ASSESSMENT TECHNIQUES SEPT- DEC / FALL 2013 CRN 11254/11246 Instructor: Office Hours: Dr. S. Nandi Days: Any time by appointment Phone: 721-8679 Location:
AUTOMOTIVE CONTROL SYSTEMS
 AUTOMOTIVE CONTROL SYSTEMS This engineering textbook is designed to introduce advanced control systems for vehicles, including advanced automotive concepts and the next generation of vehicles for Intelligent
AUTOMOTIVE CONTROL SYSTEMS This engineering textbook is designed to introduce advanced control systems for vehicles, including advanced automotive concepts and the next generation of vehicles for Intelligent
Appendix A: Motion Control Theory
 Appendix A: Motion Control Theory Objectives The objectives for this appendix are as follows: Learn about valve step response. Show examples and terminology related to valve and system damping. Gain an
Appendix A: Motion Control Theory Objectives The objectives for this appendix are as follows: Learn about valve step response. Show examples and terminology related to valve and system damping. Gain an
ACSEP - Applications and Control of Power Electronic Systems
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2018 205 - ESEIAAT - Terrassa School of Industrial, Aerospace and Audiovisual Engineering 710 - EEL - Department of Electronic Engineering
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2018 205 - ESEIAAT - Terrassa School of Industrial, Aerospace and Audiovisual Engineering 710 - EEL - Department of Electronic Engineering
Lecture PowerPoints. Chapter 19 Physics: Principles with Applications, 6 th edition Giancoli
 Lecture PowerPoints Chapter 19 Physics: Principles with Applications, 6 th edition Giancoli 2005 Pearson Prentice Hall This work is protected by United States copyright laws and is provided solely for
Lecture PowerPoints Chapter 19 Physics: Principles with Applications, 6 th edition Giancoli 2005 Pearson Prentice Hall This work is protected by United States copyright laws and is provided solely for
Reliable Reach. Robotics Unit Lesson 4. Overview
 Robotics Unit Lesson 4 Reliable Reach Overview Robots are used not only to transport things across the ground, but also as automatic lifting devices. In the mountain rescue scenario, the mountaineers are
Robotics Unit Lesson 4 Reliable Reach Overview Robots are used not only to transport things across the ground, but also as automatic lifting devices. In the mountain rescue scenario, the mountaineers are
Course Syllabus and Information
 Energy Storage Systems for Electric-based Transportations Course Syllabus and Information College of Engineering Department of Electrical and Computer Engineering Course No. ECE-5995 Selected topics Winter
Energy Storage Systems for Electric-based Transportations Course Syllabus and Information College of Engineering Department of Electrical and Computer Engineering Course No. ECE-5995 Selected topics Winter
Functional Algorithm for Automated Pedestrian Collision Avoidance System
 Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Functional Algorithm for Automated Pedestrian Collision Avoidance System Customer: Mr. David Agnew, Director Advanced Engineering of Mobis NA Sep 2016 Overview of Need: Autonomous or Highly Automated driving
Chapter01 - Control system types - Examples
 Chapter01 - Control system types - Examples Open loop control: An open-loop control system utilizes an actuating device to control the process directly without using feedback. A common example of an open-loop
Chapter01 - Control system types - Examples Open loop control: An open-loop control system utilizes an actuating device to control the process directly without using feedback. A common example of an open-loop
AC : USING MATLAB TO TEACH ELECTRIC ENERGY COURSES
 AC 2012-3239: USING MATLAB TO TEACH ELECTRIC ENERGY COURSES Dr. Max Rabiee P.E., University of Cincinnati Max Rabiee earned his Ph.D. in electrical engineering from the University of Kentucky (U.K.) in
AC 2012-3239: USING MATLAB TO TEACH ELECTRIC ENERGY COURSES Dr. Max Rabiee P.E., University of Cincinnati Max Rabiee earned his Ph.D. in electrical engineering from the University of Kentucky (U.K.) in
Section details: Direct assessment details: Automatic Transmission and its. applications, hydro static drive and Electric drive
 Section AUTO-A Faculty of Engineering & Technology, SRM University, Kattankulathur 603203 School of Mechanical Engineering Department of Automobile Engineering Course plan Date : 29 Dec. 2011 Course code
Section AUTO-A Faculty of Engineering & Technology, SRM University, Kattankulathur 603203 School of Mechanical Engineering Department of Automobile Engineering Course plan Date : 29 Dec. 2011 Course code
Today s meeting. Today s meeting 2/7/2016. Instrumentation Technology INST Symbology Process and Instrumentation Diagrams P&IP
 Instrumentation Technology INST 1010 Symbology Process and Instrumentation Diagrams P&IP Basile Panoutsopoulos, Ph.D. CCRI Department of Engineering and Technology B. Panoutsopoulos Engineering Physics
Instrumentation Technology INST 1010 Symbology Process and Instrumentation Diagrams P&IP Basile Panoutsopoulos, Ph.D. CCRI Department of Engineering and Technology B. Panoutsopoulos Engineering Physics
Sheffield Hallam University Engineering Masterclass Programme 2015
 Sheffield Hallam University For more information please contact Helen King Special Projects Officer Engineering and Tel: 0114 225 6459 Email: h.king@shu.ac.uk An overview We are excited to launch Sheffield
Sheffield Hallam University For more information please contact Helen King Special Projects Officer Engineering and Tel: 0114 225 6459 Email: h.king@shu.ac.uk An overview We are excited to launch Sheffield
EE 370L Controls Laboratory. Laboratory Exercise #E1 Motor Control
 1. Learning Objectives EE 370L Controls Laboratory Laboratory Exercise #E1 Motor Control Department of Electrical and Computer Engineering University of Nevada, at Las Vegas To demonstrate the concept
1. Learning Objectives EE 370L Controls Laboratory Laboratory Exercise #E1 Motor Control Department of Electrical and Computer Engineering University of Nevada, at Las Vegas To demonstrate the concept
ME 475: Mechatronics. ME 475: Mechatronics. Mechatronics: Introduction. Mechatronics: Introduction
 ME 475: Mechatronics ME 475: Mechatronics 3.00 credit hours Course content Introduction: organisation structure; System concept; mechanical, electrical and software components; process; software based
ME 475: Mechatronics ME 475: Mechatronics 3.00 credit hours Course content Introduction: organisation structure; System concept; mechanical, electrical and software components; process; software based
Vehicle Safety Technologies 22 January Mr Bernard Tay President, AA Singapore & Chairman, Singapore Road Safety Council
 Vehicle Safety Technologies 22 January 2011 Mr Bernard Tay President, AA Singapore & Chairman, Singapore Road Safety Council Content Introduction Vehicle safety features commonly found in cars Advanced
Vehicle Safety Technologies 22 January 2011 Mr Bernard Tay President, AA Singapore & Chairman, Singapore Road Safety Council Content Introduction Vehicle safety features commonly found in cars Advanced
COURSE NUMBER & COURSE TITLE: ME 300 Fluid Power Transmission & Control
 COURSE NUMBER & COURSE TITLE: ME 300 Fluid Power Transmission & Control INSTRUCTOR:, Credits: 3 Tao jianfeng REQUIRED COURSE OR ELECTIVE COURSE: Elective Language of instruction: Chinese TERMS OFFERED:
COURSE NUMBER & COURSE TITLE: ME 300 Fluid Power Transmission & Control INSTRUCTOR:, Credits: 3 Tao jianfeng REQUIRED COURSE OR ELECTIVE COURSE: Elective Language of instruction: Chinese TERMS OFFERED:
The potential impact of electric powertrains on vehicle dynamics, control systems and active safety
 The potential impact of electric powertrains on vehicle dynamics, control systems and active safety Mathias Lidberg Vehicle Dynamics Vehicle Engineering and Autonomous Systems Mechanics and Maritime Sciences
The potential impact of electric powertrains on vehicle dynamics, control systems and active safety Mathias Lidberg Vehicle Dynamics Vehicle Engineering and Autonomous Systems Mechanics and Maritime Sciences
IRXPE - Renewable Integration in Electrical Grids
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2016 295 - EEBE - Barcelona East School of Engineering 709 - EE - Department of Electrical Engineering BACHELOR'S DEGREE IN ELECTRICAL
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2016 295 - EEBE - Barcelona East School of Engineering 709 - EE - Department of Electrical Engineering BACHELOR'S DEGREE IN ELECTRICAL
Department of Technology Fall 2004
 Department of Technology Fall 2004 EET 352 ELECTRICAL POWER TECHNOLOGY Instructor: Prof. Vigs Chandra, Ph.D. Telephone: 859-622-1187 E-mail: vigs.chandra@eku.edu Web: http://www.technology.eku.edu/facstaff/chandra/
Department of Technology Fall 2004 EET 352 ELECTRICAL POWER TECHNOLOGY Instructor: Prof. Vigs Chandra, Ph.D. Telephone: 859-622-1187 E-mail: vigs.chandra@eku.edu Web: http://www.technology.eku.edu/facstaff/chandra/
Driver s Pathway Anticipation
 Chair for Computer Aided Medical Procedures & campar.in.tum.de Fachgebiet Driver s Pathway Anticipation Anca Berariu berariu@in.tum.de 24 April 2007 Department of Informatics Technische Universität München
Chair for Computer Aided Medical Procedures & campar.in.tum.de Fachgebiet Driver s Pathway Anticipation Anca Berariu berariu@in.tum.de 24 April 2007 Department of Informatics Technische Universität München
Study of the Performance of a Driver-vehicle System for Changing the Steering Characteristics of a Vehicle
 20 Special Issue Estimation and Control of Vehicle Dynamics for Active Safety Research Report Study of the Performance of a Driver-vehicle System for Changing the Steering Characteristics of a Vehicle
20 Special Issue Estimation and Control of Vehicle Dynamics for Active Safety Research Report Study of the Performance of a Driver-vehicle System for Changing the Steering Characteristics of a Vehicle
TRANSPORTATION TECHNOLOGY 10
 TRANSPORTATION TECHNOLOGY 10 Description In Transportation Technology 10, students will gain knowledge of safety, use of tools, and the repair and maintenance of small gas engines. Other elements of the
TRANSPORTATION TECHNOLOGY 10 Description In Transportation Technology 10, students will gain knowledge of safety, use of tools, and the repair and maintenance of small gas engines. Other elements of the
Active Driver Assistance for Vehicle Lanekeeping
 Active Driver Assistance for Vehicle Lanekeeping Eric J. Rossetter October 30, 2003 D D L ynamic esign aboratory Motivation In 2001, 43% of all vehicle fatalities in the U.S. were caused by a collision
Active Driver Assistance for Vehicle Lanekeeping Eric J. Rossetter October 30, 2003 D D L ynamic esign aboratory Motivation In 2001, 43% of all vehicle fatalities in the U.S. were caused by a collision
AEM 4321 / EE4231 Automatic Control Systems
 AEM 4321 / EE4231 Automatic Control Systems Course Overview 1/31 Outline Course Objectives Applications of Control Examples: Cruise Control and Aircraft Autopilots Terminology Block Diagrams Summary 2/31
AEM 4321 / EE4231 Automatic Control Systems Course Overview 1/31 Outline Course Objectives Applications of Control Examples: Cruise Control and Aircraft Autopilots Terminology Block Diagrams Summary 2/31
Research on Skid Control of Small Electric Vehicle (Effect of Velocity Prediction by Observer System)
") Proc. Schl. Eng. Tokai Univ., Ser. E (17) 15-1 Proc. Schl. Eng. Tokai Univ., Ser. E (17) - Research on Skid Control of Small Electric Vehicle (Effect of Prediction by Observer System) by Sean RITHY *1
Proc. Schl. Eng. Tokai Univ., Ser. E (17) 15-1 Proc. Schl. Eng. Tokai Univ., Ser. E (17) - Research on Skid Control of Small Electric Vehicle (Effect of Prediction by Observer System) by Sean RITHY *1
Fluid Power Systems & Control
 Fluid Power Systems & Control K. Craig 1 Fluid Power Fluid Properties Fluid Mechanics Fundamentals Systems Dynamic System Modeling & Analysis Fundamentals Hydraulic Components: Valves, Pumps, Actuators
Fluid Power Systems & Control K. Craig 1 Fluid Power Fluid Properties Fluid Mechanics Fundamentals Systems Dynamic System Modeling & Analysis Fundamentals Hydraulic Components: Valves, Pumps, Actuators
A Proportional Integral Derivative (PID) Force Control System Design for a Fatigue Testing Machine For New Bicycle Fork Standards
 Force Control System Design for a Fatigue Testing Machine For New Bicycle Fork Standards") A Proportional Integral Derivative (PID) Force Control System Design for a Fatigue Testing Machine For New Bicycle Fork Standards Paul Sisneros, Advisor: Professor Rani F. El-Hajjar 1 Engineering Mechanics
A Proportional Integral Derivative (PID) Force Control System Design for a Fatigue Testing Machine For New Bicycle Fork Standards Paul Sisneros, Advisor: Professor Rani F. El-Hajjar 1 Engineering Mechanics
d y FXf FXfl FXr FYf β γ V β γ FYfl V FYr FXrr FXrl FYrl FYrr
 Submission to AVEC 2002 TTLE AUTHORS Decoupling Control of fi and fl for high peformance AFS and DYC of 4 Wheel Motored Electric Vehicle Hiroaki agase, Tomoko noue and Yoichi Hori ADDRESS Department of
Submission to AVEC 2002 TTLE AUTHORS Decoupling Control of fi and fl for high peformance AFS and DYC of 4 Wheel Motored Electric Vehicle Hiroaki agase, Tomoko noue and Yoichi Hori ADDRESS Department of
Semi-Active Suspension for an Automobile
 Semi-Active Suspension for an Automobile Pavan Kumar.G 1 Mechanical Engineering PESIT Bangalore, India M. Sambasiva Rao 2 Mechanical Engineering PESIT Bangalore, India Abstract Handling characteristics
Semi-Active Suspension for an Automobile Pavan Kumar.G 1 Mechanical Engineering PESIT Bangalore, India M. Sambasiva Rao 2 Mechanical Engineering PESIT Bangalore, India Abstract Handling characteristics
2018 North America Course Schedule Hydraulic Technology Pneumatic Technology Mobile Hydraulic Technology
 2018 North America Course Schedule Hydraulic Technology Pneumatic Technology Mobile Hydraulic Technology Motion & Control Training Dept. 6035 Parkland Blvd., Cleveland, OH 44124-4141 Phone: 216.896.2495
2018 North America Course Schedule Hydraulic Technology Pneumatic Technology Mobile Hydraulic Technology Motion & Control Training Dept. 6035 Parkland Blvd., Cleveland, OH 44124-4141 Phone: 216.896.2495
AUTOMATIC VEHICLE STABILIZATION SYSTEM Gaurav Pednekar 1, Raunak Borwankar 2 and Purva Sawant 3 1, 2, 3
 AUTOMATIC VEHICLE STABILIZATION SYSTEM Gaurav Pednekar 1, Raunak Borwankar 2 and Purva Sawant 3 1, 2, 3 Students, Department of Electronics & Telecommunication, Don Bosco Institute of Technology, University
AUTOMATIC VEHICLE STABILIZATION SYSTEM Gaurav Pednekar 1, Raunak Borwankar 2 and Purva Sawant 3 1, 2, 3 Students, Department of Electronics & Telecommunication, Don Bosco Institute of Technology, University
Highly dynamic control of a test bench for highspeed train pantographs
 PAGE 26 CUSTOMERS Highly dynamic control of a test bench for highspeed train pantographs Keeping Contact at 300 km/h Electric rail vehicles must never lose contact with the power supply, not even at the
PAGE 26 CUSTOMERS Highly dynamic control of a test bench for highspeed train pantographs Keeping Contact at 300 km/h Electric rail vehicles must never lose contact with the power supply, not even at the
Car Control Exercises Accident Avoidance Exercise - Setup Diagram
 Accident Avoidance Exercise - Setup Diagram ACGG Car Control Exercise Setup Guide Page 1 Accident Avoidance Exercise Goal: To have the student keep their eyes up looking ahead and scanning the horizon.
Accident Avoidance Exercise - Setup Diagram ACGG Car Control Exercise Setup Guide Page 1 Accident Avoidance Exercise Goal: To have the student keep their eyes up looking ahead and scanning the horizon.
Aural Skills I Syllabus Spring 2015
 Aural Skills I Syllabus Spring 2015 The University of North Carolina Asheville MUSC 201 (1 credit hour) Prerequisite: MUSC 131, or passing grade on theory proficiency exam Corequisite: MUSC 231 Section
Aural Skills I Syllabus Spring 2015 The University of North Carolina Asheville MUSC 201 (1 credit hour) Prerequisite: MUSC 131, or passing grade on theory proficiency exam Corequisite: MUSC 231 Section
Motor Modeling And Position Control Lab Week 3 Closed
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with motor modeling and position
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with motor modeling and position
D.J.Kulkarni, Deputy Director, ARAI
 D.J.Kulkarni, Deputy Director, ARAI Why advanced ITS and Safety Systems? Building Ideal Vehicles Safer & More comfortable Why Advanced ITS & Safety Systems? contd. Insert Road Accident Deaths graph from
D.J.Kulkarni, Deputy Director, ARAI Why advanced ITS and Safety Systems? Building Ideal Vehicles Safer & More comfortable Why Advanced ITS & Safety Systems? contd. Insert Road Accident Deaths graph from
Analysis on Steering Gain and Vehicle Handling Performance with Variable Gear-ratio Steering System(VGS)
") Seoul 2000 FISITA World Automotive Congress June 12-15, 2000, Seoul, Korea F2000G349 Analysis on Steering Gain and Vehicle Handling Performance with Variable Gear-ratio Steering System(VGS) Masato Abe
Seoul 2000 FISITA World Automotive Congress June 12-15, 2000, Seoul, Korea F2000G349 Analysis on Steering Gain and Vehicle Handling Performance with Variable Gear-ratio Steering System(VGS) Masato Abe
Modeling and Control of IC- Engine Systems. Guten Morgen! Team Objectives & Overview Exercises Style
 Modeling and Control of IC- Engine Systems Guten Morgen! Team Objectives & Overview Exercises Style Team Chris Onder onder@ethz.ch ML K38, Tel. 044 63 2 2466 Raffael Hedinger hraffaela@ethz.ch ML K40.2,
Modeling and Control of IC- Engine Systems Guten Morgen! Team Objectives & Overview Exercises Style Team Chris Onder onder@ethz.ch ML K38, Tel. 044 63 2 2466 Raffael Hedinger hraffaela@ethz.ch ML K40.2,
Electrical Controls. Syllabus
 Instructor: Jeremie Hedges (757)651-1007 Contact Hours: 72 hours Prerequisites: None Electrical Controls Syllabus Course Description: This course is designed to present a blend of electrical theory and
Instructor: Jeremie Hedges (757)651-1007 Contact Hours: 72 hours Prerequisites: None Electrical Controls Syllabus Course Description: This course is designed to present a blend of electrical theory and
MOTOR VEHICLE HANDLING AND STABILITY PREDICTION
 MOTOR VEHICLE HANDLING AND STABILITY PREDICTION Stan A. Lukowski ACKNOWLEDGEMENT This report was prepared in fulfillment of the Scholarly Activity Improvement Fund for the 2007-2008 academic year funded
MOTOR VEHICLE HANDLING AND STABILITY PREDICTION Stan A. Lukowski ACKNOWLEDGEMENT This report was prepared in fulfillment of the Scholarly Activity Improvement Fund for the 2007-2008 academic year funded
Keywords: driver support and platooning, yaw stability, closed loop performance
 CLOSED LOOP PERFORMANCE OF HEAVY GOODS VEHICLES Dr. Joop P. Pauwelussen, Professor of Mobility Technology, HAN University of Applied Sciences, Automotive Research, Arnhem, the Netherlands Abstract It is
CLOSED LOOP PERFORMANCE OF HEAVY GOODS VEHICLES Dr. Joop P. Pauwelussen, Professor of Mobility Technology, HAN University of Applied Sciences, Automotive Research, Arnhem, the Netherlands Abstract It is
MECA0492 : Vehicle dynamics
 MECA0492 : Vehicle dynamics Pierre Duysinx Research Center in Sustainable Automotive Technologies of University of Liege Academic Year 2017-2018 1 Bibliography T. Gillespie. «Fundamentals of vehicle Dynamics»,
MECA0492 : Vehicle dynamics Pierre Duysinx Research Center in Sustainable Automotive Technologies of University of Liege Academic Year 2017-2018 1 Bibliography T. Gillespie. «Fundamentals of vehicle Dynamics»,
Integrated Control Strategy for Torque Vectoring and Electronic Stability Control for in wheel motor EV
 EVS27 Barcelona, Spain, November 17-20, 2013 Integrated Control Strategy for Torque Vectoring and Electronic Stability Control for in wheel motor EV Haksun Kim 1, Jiin Park 2, Kwangki Jeon 2, Sungjin Choi
EVS27 Barcelona, Spain, November 17-20, 2013 Integrated Control Strategy for Torque Vectoring and Electronic Stability Control for in wheel motor EV Haksun Kim 1, Jiin Park 2, Kwangki Jeon 2, Sungjin Choi
Understanding the benefits of using a digital valve controller. Mark Buzzell Business Manager, Metso Flow Control
 Understanding the benefits of using a digital valve controller Mark Buzzell Business Manager, Metso Flow Control Evolution of Valve Positioners Digital (Next Generation) Digital (First Generation) Analog
Understanding the benefits of using a digital valve controller Mark Buzzell Business Manager, Metso Flow Control Evolution of Valve Positioners Digital (Next Generation) Digital (First Generation) Analog
ME 455 Lecture Ideas, Fall 2010
 ME 455 Lecture Ideas, Fall 2010 COURSE INTRODUCTION Course goal, design a vehicle (SAE Baja and Formula) Half lecture half project work Group and individual work, integrated Design - optimal solution subject
ME 455 Lecture Ideas, Fall 2010 COURSE INTRODUCTION Course goal, design a vehicle (SAE Baja and Formula) Half lecture half project work Group and individual work, integrated Design - optimal solution subject
NJQSAC Department: Course Title Physical Ed Drivers Education Textbook(s): Week 1 Week 2
: Week 1 Week 2") Physical Ed Drivers Education Textbook(s): Date: Week 1 Week 2 What types of skills should a student possess entering this course? What are the steps needed to complete in order to gain a basic drivers
Physical Ed Drivers Education Textbook(s): Date: Week 1 Week 2 What types of skills should a student possess entering this course? What are the steps needed to complete in order to gain a basic drivers
Resources for Electrical courses
 ELEA0801 Electrical Safety & Codes Resources for Electrical courses Electrical Motor Controls for Integrated Systems Fifth edition (ISBN# 978-0-8269-1226-8) National Building Code 2005 (ISBN# 0-660-19426-0)
ELEA0801 Electrical Safety & Codes Resources for Electrical courses Electrical Motor Controls for Integrated Systems Fifth edition (ISBN# 978-0-8269-1226-8) National Building Code 2005 (ISBN# 0-660-19426-0)
Required Textbook and Materials 1. Texas Commercial Vehicle Drivers Handbook 2. Handout literature
 Commercial Drivers License (CVOP 1201) Credit: 2 semester credit hours (1 hour lecture, 4 hours lab) Co-requisite: LNWK 1311 Course Description Overview of the State of Texas Class A Commercial Drivers
Commercial Drivers License (CVOP 1201) Credit: 2 semester credit hours (1 hour lecture, 4 hours lab) Co-requisite: LNWK 1311 Course Description Overview of the State of Texas Class A Commercial Drivers
The Imperative to Deploy. Automated Driving. CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper
 Stepper") The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
The Imperative to Deploy 1 Automated Driving CC MA-Info, 15th December 2016 Dr. Hans-Peter Hübner Kay (CC/EB4) Stepper 2 Paths to the Car of the Future costs roaming e-bike driving enjoyment hybrid electric
AUTO 121 Auto Electrical I Fall Section J01 3 credits
 UAS Automotive Technology Course Syllabus AUTO 121 Auto Electrical I Fall 2012 - Section J01 3 credits Instructor: Tony Martin Phone: 796-6126 (office) or 796-2034 (home) Email: tony.martin@uas.alaska.edu
UAS Automotive Technology Course Syllabus AUTO 121 Auto Electrical I Fall 2012 - Section J01 3 credits Instructor: Tony Martin Phone: 796-6126 (office) or 796-2034 (home) Email: tony.martin@uas.alaska.edu
Cooperative brake technology
 Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
Cooperative driving and braking applications, Maurice Kwakkernaat 2 Who is TNO? TNO The Netherlands Organisation for Applied Scientific Research Founded by law in 1932 Statutory, non-profit research organization
MECA0492 : Introduction to Vehicle Stability Control
 MECA0492 : Introduction to Vehicle Staility Control Pierre Duysinx Research Center in Sustainale Automotive Technologies of University of Liege Academic Year 2017-2018 1 Biliography T. Gillespie. «Fundamentals
MECA0492 : Introduction to Vehicle Staility Control Pierre Duysinx Research Center in Sustainale Automotive Technologies of University of Liege Academic Year 2017-2018 1 Biliography T. Gillespie. «Fundamentals
Vibration Fundamentals Training System Hands-On Turnkey System for Teaching Vibration Fundamentals
 Vibration Fundamentals Training System Hands-On Turnkey System for Teaching Vibration Fundamentals www.haopute.com email:info@haopute.com phone:02884625157 mobile:18982185717 An Ideal Tool for Optimizing
Vibration Fundamentals Training System Hands-On Turnkey System for Teaching Vibration Fundamentals www.haopute.com email:info@haopute.com phone:02884625157 mobile:18982185717 An Ideal Tool for Optimizing
Development of California Regulations for Testing and Operation of Automated Driving Systems
 Development of California Regulations for Testing and Operation of Automated Driving Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California,
Development of California Regulations for Testing and Operation of Automated Driving Systems Steven E. Shladover, Sc.D. California PATH Program Institute of Transportation Studies University of California,
SIUC Department of Aviation Technologies Fall Semester 2016
 SIUC Department of Aviation Technologies Fall Semester 2016 Course Syllabus AVT-213 IGNITION SYSTEMS Instructor: Donald Bartlett Office Location Carbondale: Test Cell Room 101 Office Phone: Direct 618-453-9212
SIUC Department of Aviation Technologies Fall Semester 2016 Course Syllabus AVT-213 IGNITION SYSTEMS Instructor: Donald Bartlett Office Location Carbondale: Test Cell Room 101 Office Phone: Direct 618-453-9212
Mechatronics Instructor: Dr. Hong Zhang
 R Mechatronics Instructor: Dr. Hong Zhang Mechanical Engineering Rowan University ME ROWAN 2 R General Information WF 10:50am 12:05am Rm 239, Rowan Hall Instructor: Dr. Hong Zhang Office: Rm 133, Rowan
R Mechatronics Instructor: Dr. Hong Zhang Mechanical Engineering Rowan University ME ROWAN 2 R General Information WF 10:50am 12:05am Rm 239, Rowan Hall Instructor: Dr. Hong Zhang Office: Rm 133, Rowan
BY BOB PATTENGALE. Photoillustration: Harold Perry; photos: Jupiter Images & Wieck Media
 42 June 2008 ESCAPE ROUTE BY BOB PATTENGALE Photoillustration: Harold Perry; photos: Jupiter Images & Wieck Media Electronic stability control will be a mandatory safety system on 2012 passenger vehicles,
42 June 2008 ESCAPE ROUTE BY BOB PATTENGALE Photoillustration: Harold Perry; photos: Jupiter Images & Wieck Media Electronic stability control will be a mandatory safety system on 2012 passenger vehicles,
Features of PSEC Educational Programs
 Power Systems & Energy Course 2018 These intensive four-week programs are designed to strike the necessary balance between energy systems engineering theory and relevant, real-world applications. With
Power Systems & Energy Course 2018 These intensive four-week programs are designed to strike the necessary balance between energy systems engineering theory and relevant, real-world applications. With
A Brake Pad Wear Control Algorithm for Electronic Brake System
 Advanced Materials Research Online: 2013-05-14 ISSN: 1662-8985, Vols. 694-697, pp 2099-2105 doi:10.4028/www.scientific.net/amr.694-697.2099 2013 Trans Tech Publications, Switzerland A Brake Pad Wear Control
Advanced Materials Research Online: 2013-05-14 ISSN: 1662-8985, Vols. 694-697, pp 2099-2105 doi:10.4028/www.scientific.net/amr.694-697.2099 2013 Trans Tech Publications, Switzerland A Brake Pad Wear Control
CENTRAL MAINE COMMUNITY COLLEGE Auburn, ME Course Syllabus
 CENTRAL MAINE COMMUNITY COLLEGE Auburn, ME 04210 Automotive Technology Term: Spring 18 AUT 292 Computerized Chassis Controls Instructor: Carl Hinkley Course Syllabus Course_Description This course will
CENTRAL MAINE COMMUNITY COLLEGE Auburn, ME 04210 Automotive Technology Term: Spring 18 AUT 292 Computerized Chassis Controls Instructor: Carl Hinkley Course Syllabus Course_Description This course will
Assessment of Governor Control Parameter Settings of a Submarine Diesel Engine
 Assessment of Governor Control Parameter Settings of a Submarine Diesel Engine Peter Hield and Michael Newman Defence Science and Technology Organisation, Melbourne, Vic, Australia peter.hield@dsto.defence.gov.au
Assessment of Governor Control Parameter Settings of a Submarine Diesel Engine Peter Hield and Michael Newman Defence Science and Technology Organisation, Melbourne, Vic, Australia peter.hield@dsto.defence.gov.au
18th ICTCT Workshop, Helsinki, October Technical feasibility of safety related driving assistance systems
 18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
18th ICTCT Workshop, Helsinki, 27-28 October 2005 Technical feasibility of safety related driving assistance systems Meng Lu Radboud University Nijmegen, The Netherlands, m.lu@fm.ru.nl Kees Wevers NAVTEQ,
EE 525 Power System Applications of Power Electronics Prof. Ali Mehrizi-Sani EME 35
 EE 525 Power System Applications of Power Electronics Prof. Ali Mehrizi-Sani EME 35 mehrizi@eecs.wsu.edu School of Electrical Engineering and Computer Science Tuesday, September 2, 2014 Course Information
EE 525 Power System Applications of Power Electronics Prof. Ali Mehrizi-Sani EME 35 mehrizi@eecs.wsu.edu School of Electrical Engineering and Computer Science Tuesday, September 2, 2014 Course Information
Vehicle Dynamics Models for Driving Simulators
 Vehicle Dynamics Models for Driving Simulators Thomas D. Gillespie, Director of Product Planning Mechanical Simulation Corporation Agenda Introduction to Mechanical Simulation Vehicle dynamics simulation
Vehicle Dynamics Models for Driving Simulators Thomas D. Gillespie, Director of Product Planning Mechanical Simulation Corporation Agenda Introduction to Mechanical Simulation Vehicle dynamics simulation
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY
 UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
UNIFIED, SCALABLE AND REPLICABLE CONNECTED AND AUTOMATED DRIVING FOR A SMART CITY SAE INTERNATIONAL FROM ADAS TO AUTOMATED DRIVING SYMPOSIUM COLUMBUS, OH OCTOBER 10-12, 2017 PROF. DR. LEVENT GUVENC Automated
Industrial Controls Training System. Motor Drives. Courseware Sample F0
 Industrial Controls Training System Motor Drives Courseware Sample 87669-F0 A First Edition Published October 2013 2011 by Lab-Volt Ltd. Printed in Canada All rights reserved ISBN 978-2-89640-469-8 (Printed
Industrial Controls Training System Motor Drives Courseware Sample 87669-F0 A First Edition Published October 2013 2011 by Lab-Volt Ltd. Printed in Canada All rights reserved ISBN 978-2-89640-469-8 (Printed
AUTOMOTIVE TECHNOLOGY 41 COURSE SYLLABUS
 AUTOMOTIVE TECHNOLOGY 41 COURSE SYLLABUS Course Description: Recommended: AT1 or pass the Auto Tech 1 Placement Test. Principles of engine rebuilding, includes diagnosis, removing, disassembly, cleaning,
AUTOMOTIVE TECHNOLOGY 41 COURSE SYLLABUS Course Description: Recommended: AT1 or pass the Auto Tech 1 Placement Test. Principles of engine rebuilding, includes diagnosis, removing, disassembly, cleaning,
Course Code: Bendix Wingman Fusion System Overview Study Guide
 Course Code: 8792 Bendix Wingman Fusion System Overview Study Guide 2015 Navistar, Inc. 2701 Navistar Drive, Lisle, IL 60532. All rights reserved. No part of this publication may be duplicated or stored
Course Code: 8792 Bendix Wingman Fusion System Overview Study Guide 2015 Navistar, Inc. 2701 Navistar Drive, Lisle, IL 60532. All rights reserved. No part of this publication may be duplicated or stored
Systems-Theoretic Process Analysis: AUTOMOBILE FEATURES FOR LANE MANAGEMENT
 Systems-Theoretic Process Analysis: AUTOMOBILE FEATURES FOR LANE MANAGEMENT Diogo Castilho, Megan France & Dajiang Suo Image source: 1 LADAR image of London streets (The New York Times, 11/11/15) 1 MOTIVATION
Systems-Theoretic Process Analysis: AUTOMOBILE FEATURES FOR LANE MANAGEMENT Diogo Castilho, Megan France & Dajiang Suo Image source: 1 LADAR image of London streets (The New York Times, 11/11/15) 1 MOTIVATION
THE FUTURE OF AUTONOMOUS CARS
 Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
Index Table of Contents Table of Contents... i List of Figures... ix Executive summary... 1 1 Introduction to autonomous cars... 3 1.1 Definitions and classifications... 3 1.2 Brief history of autonomous
XIV.C. Flight Principles Engine Inoperative
 XIV.C. Flight Principles Engine Inoperative References: FAA-H-8083-3; POH/AFM Objectives The student should develop knowledge of the elements related to single engine operation. Key Elements Elements Schedule
XIV.C. Flight Principles Engine Inoperative References: FAA-H-8083-3; POH/AFM Objectives The student should develop knowledge of the elements related to single engine operation. Key Elements Elements Schedule
Bus Handling Validation and Analysis Using ADAMS/Car
 Bus Handling Validation and Analysis Using ADAMS/Car Marcelo Prado, Rodivaldo H. Cunha, Álvaro C. Neto debis humaitá ITServices Ltda. Argemiro Costa Pirelli Pneus S.A. José E. D Elboux DaimlerChrysler
Bus Handling Validation and Analysis Using ADAMS/Car Marcelo Prado, Rodivaldo H. Cunha, Álvaro C. Neto debis humaitá ITServices Ltda. Argemiro Costa Pirelli Pneus S.A. José E. D Elboux DaimlerChrysler
Új technológiák a közlekedésbiztonság jövőjéért
 Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Új technológiák a közlekedésbiztonság jövőjéért Dr. Szászi István Occupant Safety Robert Bosch Kft. 1 Outline 1. Active and Passive Safety - definition 2. Driver Information Functions 3. Driver Assistance
Road Safety Factsheet
 Road Safety Factsheet Electronic Braking Systems Factsheet August 2017 Brake Assist Brake Assist (BA) is a technology that ensures that the maximum pressure is applied by the brakes to stop a vehicle in
Road Safety Factsheet Electronic Braking Systems Factsheet August 2017 Brake Assist Brake Assist (BA) is a technology that ensures that the maximum pressure is applied by the brakes to stop a vehicle in
What is Electronic Stability Control (ESC)? What conditions does ESC try to correct? A brief timeline of ESC Reduction in fatal crash risk attributed
? What conditions does ESC try to correct? A brief timeline of ESC Reduction in fatal crash risk attributed") September 20, 2010 What is Electronic Stability Control (ESC)? What conditions does ESC try to correct? A brief timeline of ESC Reduction in fatal crash risk attributed to ESC What are trade names for
September 20, 2010 What is Electronic Stability Control (ESC)? What conditions does ESC try to correct? A brief timeline of ESC Reduction in fatal crash risk attributed to ESC What are trade names for
Identification of tyre lateral force characteristic from handling data and functional suspension model
 Identification of tyre lateral force characteristic from handling data and functional suspension model Marco Pesce, Isabella Camuffo Centro Ricerche Fiat Vehicle Dynamics & Fuel Economy Christian Girardin
Identification of tyre lateral force characteristic from handling data and functional suspension model Marco Pesce, Isabella Camuffo Centro Ricerche Fiat Vehicle Dynamics & Fuel Economy Christian Girardin
Improvement of Vehicle Dynamics by Right-and-Left Torque Vectoring System in Various Drivetrains x
 Improvement of Vehicle Dynamics by Right-and-Left Torque Vectoring System in Various Drivetrains x Kaoru SAWASE* Yuichi USHIRODA* Abstract This paper describes the verification by calculation of vehicle
Improvement of Vehicle Dynamics by Right-and-Left Torque Vectoring System in Various Drivetrains x Kaoru SAWASE* Yuichi USHIRODA* Abstract This paper describes the verification by calculation of vehicle
Reduction of Self Induced Vibration in Rotary Stirling Cycle Coolers
 Reduction of Self Induced Vibration in Rotary Stirling Cycle Coolers U. Bin-Nun FLIR Systems Inc. Boston, MA 01862 ABSTRACT Cryocooler self induced vibration is a major consideration in the design of IR
Reduction of Self Induced Vibration in Rotary Stirling Cycle Coolers U. Bin-Nun FLIR Systems Inc. Boston, MA 01862 ABSTRACT Cryocooler self induced vibration is a major consideration in the design of IR
Power and machines Program
 Bachelor Degree Power and machines Program Dept. of Electrical Engineering Course specification Electrical Testing (A-B) اختبارات كهربية )أ- ب( EP324 1. Course Aim Main Aim To apply the theory of electrical
Bachelor Degree Power and machines Program Dept. of Electrical Engineering Course specification Electrical Testing (A-B) اختبارات كهربية )أ- ب( EP324 1. Course Aim Main Aim To apply the theory of electrical
Computer Aided Transient Stability Analysis
 Journal of Computer Science 3 (3): 149-153, 2007 ISSN 1549-3636 2007 Science Publications Corresponding Author: Computer Aided Transient Stability Analysis Nihad M. Al-Rawi, Afaneen Anwar and Ahmed Muhsin
Journal of Computer Science 3 (3): 149-153, 2007 ISSN 1549-3636 2007 Science Publications Corresponding Author: Computer Aided Transient Stability Analysis Nihad M. Al-Rawi, Afaneen Anwar and Ahmed Muhsin
MECA0494 : Braking systems
 MECA0494 : Braking systems Pierre Duysinx Research Center in Sustainable Automotive Technologies of University of Liege Academic Year 2017-2018 1 MECA0494 Driveline and Braking Systems Monday 23/10 (@ULG)
MECA0494 : Braking systems Pierre Duysinx Research Center in Sustainable Automotive Technologies of University of Liege Academic Year 2017-2018 1 MECA0494 Driveline and Braking Systems Monday 23/10 (@ULG)