Team Drum Roll Mobile Marching Band Drum Set
|
|
|
- Horace Wheeler
- 5 years ago
- Views:
Transcription


1 Team Drum Roll Mobile Marching Band Drum Set University of Idaho Mechanical Engineering Senior Design Summer Fall 2011 Aaron Braithwaite Justin Dilworth Sarah Helland Toni Töpfer

2 Executive Summary The following design report details the U.I. Summer Fall 2011 M.E. senior design project to design a mobile drum set. The report is aimed to specifically convey the background of our project, details of the problem faced, the solution paths generated, the actual path taken to arrive at one solution, and the solution described in detail accompanied by a cost estimate, budget summary, and drawing package. Our team, Team Drum Roll, needed to find a way to make a stationary drum set mobile. As the current product market features drums for marchers that sacrifice sound quality for weight and mobility, our task was to design a stationary drum set into a mobile product and hence retain the preferable sound quality while offering required mobility. This project was distributed across two semesters. First semester work consisted largely of concept generation and preliminary prototyping. For simplification the project was divided into four categories: a mobility solution, human interface, drum connection, and frame. The mobility solution was the primary category explored semester one with concepts generated for spherical wheels, omni-directional wheels and lightweight casters. The human interface of the device was decided to consist of a Pearl harness as these are already widely implemented. For the drum connection we decided to use block clamps. Lastly, for the frame we narrowed our considerations to a two or three-legged structure that must be collapsable, lightweight, and hold individual members rigidly together. Second semester we built and tested our prototypes and generated a final design solution accordingly. Interchangeable aluminum components were manufactured in the U.I. Gauss Johnson machine shop. These components were then used to assemble both a two-legged and a three-legged device. Both devices were customer tested and the two-legged frame was accordingly chosen for the final design solution. Additionally, a spherical wheel was developed that rotated and changed direction more easily than the caster wheels. Team Drum Roll Toni Töpfer, Sarah Helland, Justin Dilworth, Aaron Braithwaite 1
3 Table of Contents I. Background!... 3 II. Problem Definition!... 4 III. Concept Exploration!... 5 A. Mobility Solution!... 5 B. Drum Connection!... 6 C. Human Interface!... 6 D. Frame!... 7 IV. Prototype Testing!... 9 V. Detailed Design! A. Mobility Solution! B. Drum Connection! C. Human Interface! D. Frame! VI. Budget Summary! VII. Recommendations! VIII. Appendices! Appendix A: Pearl Catalog Products! Appendix B: Drawing Package for Two-Wheeled Design! Appendix C: Drawing Package for Three-Wheeled Design!
 as well as sideline stationary drum stands (Figure 2) for additional instruments.")
.")


4 I. Background The percussion section of present day marching bands consists of marching drummers with specifically modified marching drum sets (Figure 1) as well as sideline stationary drum stands (Figure 2) for additional instruments. Drums for marching drummers are body mounted and accordingly produced in a light weight fashion that makes them loose the sound quality of drums employed in stationary bands (Figure 3). Stationary sideline drum sets are heavy and large so they cannot be marched with and are difficult to even get out on the field. Daniel Bukvich of the University of Idaho Music Department and Dr. Edwin Odom of the University of Idaho Mechanical Engineering Department have asked us to build a device that allows marching band drummers to play various arrangements of regular drums while marching on the play field. Specifically, we have set out to build a device to support stationary drum sets while enabling the user to be mobile in a marching fashion. The device would provide marching bands with greater freedom of performance movements combined with a larger playable music selection. Figure 1. Figure 2. Figure 3. 3
5 II. Problem Definition The project goal consists of designing a final prototype capable of satisfying below stated constraints during the Summer and Fall 2011 semesters. Final deliverables include this completed project report, a detailed drawing package for the production of future devices and a physical prototype using materials available to us. The final device aims to satisfy the following constraints: Carry at minimum: -One 10 dia. 7 lb. tom -One 12 dia. 8 lb. tom -One 14 dia. 13 lb. snare -One 14 dia. 12 lb. tom -One 18 dia. 4 lb. cymbal Move in all directions on single plane (sideways, forward, backward, turn radially) Enable user to be marching at speeds up to 2 m/s Retain mobility on fields with up to 6 grass growth and level surface Built/adjustable to a wide range of user heights (5 0 to 6 5 for >95% of population) Adjustable to various drumming arrangements User-controlled w/o hands Light-weight, free-standing, stores efficiently Pairs with other devices to form single unit for multiple users To better achieve the above goals our project consists of four primary categories: Mobility Solution- Enables the device to move across the field. Drum Connection- Connects the drums to the device. Human Interface- Connects the user to the device. Frame- Combines all members in a single unit. 4





6 III. Concept Exploration This section describes in detail the four main components of our project: the mobility solution, drum connection, human interface and frame architecture. These developed concepts are based on the initial research conducted during the summer 2011 semester. This research consisted of looking at any and all devices that might relate to the project. Some particularly useful things researched were utility carts, the Pearl drum support system, climbing harnesses, omni-directional wheels and various caster-wheel designs. Products and ideas were evaluated and tested physically when possible. A. Mobility Solution Concept 1: This is an alternative to a regular caster that allows a full range of motion. It uses a miniature caster to allow the spherical ball to rotate in all directions, and the side wheels help with the rotation and also keep it in place. Because the caster is much smaller than the ones we would otherwise use, it rotates much more easily and quickly. Figure 5. Figure 4. Concept 2: This wheel is composed of many smaller wheels set along the outside of a large wheel. The eight smaller wheels are skateboard wheels, held in place with an aluminum central piece. The larger wheel is attached to an axle and rotates in the normal direction of a wheel. The smaller wheel that is touching the ground rotates along its own axle, allowing sideways movement. This eliminates the rotation that makes casters hard to turn. Concept 3: This is a lightweight caster with a large diameter. If a caster is used this is probably the best option. The caster does not have to be manufactured at the school as it is readily available from commercial sellers. Figure 6. 5
. This system is familiar to the drummers who will be using our device and is both secure and compact. Figure 8. Figure 7.")



7 B. Drum Connection Standard Pearl mounts were chosen (Figure 7), attached with an exterior rack that is built to the standard of the pearl racks (Figure 8). This system is familiar to the drummers who will be using our device and is both secure and compact. Figure 8. Figure 7. C. Human Interface Concept 1: This is the first concept design we considered (Figure 9) and implements a push bar at waist height behind the drums that the drummer would be attached to with a climbing harness type arrangement. This design proved to get in the way of the drummers lower arms and hands, but is nonetheless straightforward to use. Concept 2: The second concept is to bring bars up from below up to the drummer s sides and attach them to the harness there. This would be less in the way of the drummer, but might not give him much advantage when trying to turn the device. Figure 9. Concept 3: This would be to add stomach and back pressure plates with support straps to the above arrangement. This has adjustability issues and is almost certainly less comfortable, but it might prove to be easier to turn with. Figure 10. 6
 for maximum stability. It had a push bar at the wide side of the triangle.")



8 D. Frame Concept 1: Our first experimental prototype was a three-wheeled design (Figure 11) for maximum stability. It had a push bar at the wide side of the triangle. This shape was generally agreed to be effective at carrying the drums, but it was difficult to turn. The enclosed side at the top of the frame got in the way when the drums were played. Figure 11. Concept 2: This is again a three-wheeled design. It melds seamlessly into the drum connection. It has a triangular base that spreads outward to a four sided design at the top. Both the top and bottom sections are left open at the side facing the drummer, so that nothing gets in the way of marching or drum playing. Figure 12. Figure 13. 7


9 Concept 3, Machined Aluminum: Version 1: This is a manufactured version of the basic three-wheel frame. It keeps the external bar set up of the second prototype. This allows for a wide variety of drum arrangements, as the drums can be set up to rest either inside the frame or outside it. Instead of a complex, rigid frame, we stripped it down to the essentials. This may lead to some instability, but allows for much easier manufacturing. The legs are each bent outward, thus allowing extra clearance for the drummer's legs and any large or deep drum that would be carried. Each leg is individually adjustable, as is the attachment for each drum, allowing for not only a wide variety of drum arrangements but for a wide range of drummer heights. A human connection has been added that is a bar bent outward with two holes in it that are compatible with the standard drum harness. Figure 14. Figure 15. Version 2: This is a try for a smaller, more compact version of the frame. Instead of the large external frame it has a horizontal bar in the center of the drums. This is attached to a leg on either end and a bar leading out to the drummer in the back. Because there are only two legs, this frame is not free-standing. It is compatible with the same drum harness as the larger frame and is, of course, lighter. It does not, however, allow for as wide a variety of drum arrangements, as it simply does not have as much bar length. It shares many components with our three-wheeled frame, particularly the drum holders and the legs, which makes manufacture easier. The main advantage of this frame is that it has a much smaller moment of inertia than the larger frame and is therefore going to be easier to turn. 8
 tests focused on providing feedback from broad concept generation and initial trials, while second semester (fall) tests were based on specific product prototypes built in the")
10 IV. Prototype Testing This section describes in detail tests carried out during both semesters with respect to the design process. First semester (summer) tests focused on providing feedback from broad concept generation and initial trials, while second semester (fall) tests were based on specific product prototypes built in the machine shop. Semester two tests were carried in conjunction with ME 430, Senior Lab, for detailed statistical analysis. Semester 1 Tests Test 1: For this test, two carts from the U.I. machine shop were rolled across lawn in front of the U.I. Gauss Johnson building. Goals consisted of gaining a better picture of how existing products perform. A heavy shop cart and a lighter and smaller cart were used. Things We Learned: The 4" diameter wheels rolled surprisingly easily across the grass. The heavier and larger cart was much more stable. Clearance at the base of the cart for the drummer s legs is vital. It's hard to start a turn because the cart resists turning. Figure 16. Test 2: We built a first prototype based on what we learned from our test of existing carts and conversations with Dr. Odom and Professor Bukvich at Snapshot Day 1. We used 2x4s and spare casters provided by the music department. We then experimented with pushing the prototype when it was loaded with drums and tried the fit of various harness ideas. The device was shown to Dr. Odom and professor Bukvich for further advice on what should be changed. Things We Learned A highly disproportionate amount of weight ends up on the front wheel. Attaching the drums to a perimeter bar would allow for more flexibility in arrangement. It definitely needs better wheels, because these ones do not move freely and quickly. The push bar has a serious clearance issue with the hands and arms of the drummer. 9


11 Semester 2 Tests Computer Simulation: Computer simulations of each of the frame version's mass and inertia in SolidWorks. The desired arrangement of drums were included in this calculation. Things We Learned: There was only a slight difference in mass between the two frames with the drums. There was a highly significant increase in moment of inertia in the larger frame. We may expect, therefore, that the larger frame will be significantly harder to turn. Figure 17. Movement Testing: For this experiment we had people take each of the drum frames and walk with it. We asked them to march forward for 30 feet, march backward for 30 feet, march left and right 30 feet, turn in a circle, and march out 30 feet, turn around, and march back. We timed them performing these actions and then asked them to rate the performance of the frame for each of them. Our rating system was from one to five, with one being easy to use and five being hard vs. 2 Wheeled Drum Set Rating: 95% Confidence Intervals of Difference of Means Difference of Rating (3-2) forward backward sideways Drum Set Movement circle out and back Figure 19., this shows our difference of means analysis between the two-wheeled Figure 18. Things We Learned: There was no significant difference in the time they took to march the different directions. The two-wheeled frame was significantly easier to turn and move backward with. The shoulder harness bounced off the shoulders when the three-wheeled frame was used. 10

12 Height Testing: For this test, we recorded the height of the drummer and their drum height preference of 10 marching band drummers. We asked the drummer to describe where they wanted the top of the drum to be for their optimal playing height, and we would adjust our frame to fit accordingly. We then used linear regression to find a relationship between the height of the drummer and the frame arrangement preferred by the drummers. Things We Learned: There is a relationship between drummer height and preferred drum height preference. Although the drummer's heights varied by 12" the needed adjustability in the frame was 5". Figure 20., this shows adjusted drum heights for 10 measurements taken from U. I. marching band drummers. 11
13 Along with testing we did this design failure mode and effect analysis. The following criteria was used. DFMEA Criteria Severity 1: No Effect 2: Still functioning and replaceable 3: Not functioning and replaceable 4: Unusable Occurrence 1: Less than once per season 2: Less than once per week 3: Less than once per practice 4: Multiple times per practice 5: Constantly Detection 1: Visible to inspection 2: Detectable by feel 3: Undetectable until failure 12
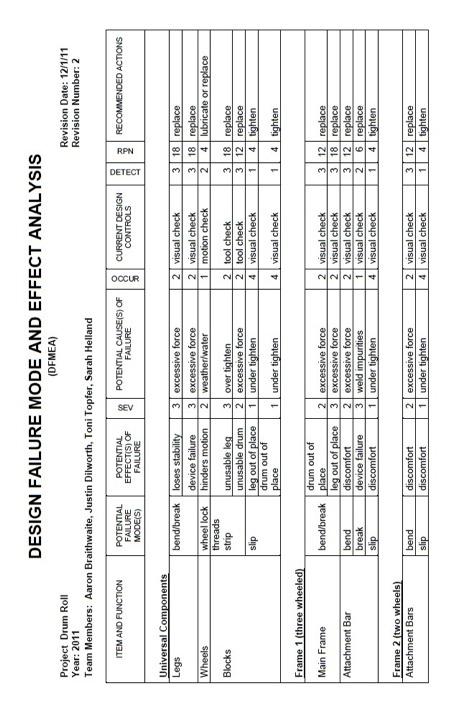
14 13



15 V. Detailed Design This section describes in detail our final design based on concept generation and prototype testing. Final Mobile Drum Set: To the right is a picture of our implemented prototype. It has all the major features of our final design, but is not quite as polished as the final design will be. We chose this prototype as the base of our final solution over the three-wheeled version for two reasons. First, the harness of this version stayed securely on the shoulders of the user even when traveling over bumpy ground. Second, users rated it as being easier to turn and easier to move backward. Since these are vital abilities for the mobile drum set to have, we decided to go with this frame. Figure 22. Figure 21. A. Mobility Solution Our implemented prototype uses the high quality casters that we scavenged from a walker. These performed adequately during testing but exhibited a marked tendency to resist reversing direction. Our final solution would be, therefore, to use spherical wheels like the one we created a working model of during the last portion of our project. This wheel responds more quickly to a change in direction than a large caster. This is because the large ball can easily rotate in all directions and the small caster included in the wheel does not have to rotate as far to change direction as the stand-alone large caster does. B. Drum Connection We designed these connectors to connect the frame together and also to attach the drums to the frame. The only difference between the connections is that the ones intended for the drums have a triangular groove instead of a rectangular one, in order to better fit the round bar that is attached to the drums. The advantage of these connections is that they make the frame incredibly easy to reconfigure for different arrangements of drums. The main disadvantage of these connections is that they are currently connected by long screws that take a considerable time to loosen and tighten. Additionally, there are better mounts for the drums that we would use in our final design, while retaining these for the frame connections. Figure









.")
single)set)of)components)was)used)to)create)two) prototypes:)one)with)two)wheels)and)one)with)three.")
16 C. Human Interface Our implemented prototype used an old drum harness that was a solid piece of material that rested on the shoulders of the drummer. This worked well at keeping the drum frame at the right height for the drummer and not getting in the drummers way when moving. It also had the benefit of being a piece of equipment that was readily available. The problem with this harness is that it did not stay close to the body when moving sideways and turning. It also did not provide much leverage when turning. To improve this, our final design incorporates a high-quality drum harness from Pearl like the one on the right. This harness straps securely to the drummers stomach and so eliminates a great deal of the problems we had with the old harness. Figure 24. D. Frame As mentioned above, this frame behaves well when marched with, being relatively easy to turn and move backward. It also stays connected to the drummer well. In addition, the minimalist design allows the drum set to be disassembled into a compact set of bars for transportation purposes. The major change we would make to this frame would be to add a kickstand. As it is, although the frame takes a bunch of the weight off of the drummer, it does not support it fully. This could make it tiring to stand with over long periods of time. Additionally, it makes it a bit difficult to get into and out of. A kickstand would solve this problem. We would also use 1 3/8 square tubing so that we could use the pcx-200 drum brackets sold by Pearl to hold the drums. Total measured weight for the two-wheeled prototype device is 24.2 lb. (without drums). Figure 25. A)single)set)of)components)was)used)to)create)two) prototypes:)one)with)two)wheels)and)one)with)three.) Frame&Connec+on& Human&Interface& Machined)aluminum) blocks)offer)wide) adjustability)and)fast) manufacturing.) Pearl)drummer s)harness)is) easily)available)to)drummers) and)provides)shoulder)as) well)as)waist)support.) Frame& Suggested)final)design)2= wheeled)frame) construc>on)exhibits) preferred)marching) characteris>cs.) Mobility&Solu+on& 3=wheeled)version)of)instrumented)prototype.) Suggested)final)design)spherical) wheel)offers)less)turning) resistance)and)greater)stability) than)present)casters.) 15
17 VI. Budget Summary Provided in this section is a cost breakdown of our entire project as well as an estimated cost of our proposed design. The final cost estimate does not reflect pricing for a spherical wheel as this requires further development and costs are as reflected in the project budget (3D printing). Labor hours are primarily based on initial prototyping times and machine shop work at single device production. 16
18 VII. Recommendations This section details the following recommendations for future product design. Connect Multiple Devices: We would like to come up with an effective solution to allow multiple copies of our device to connect to each other. This would allow the drummers to move in sync for marching configurations and is one of the criteria our client gave us. Our current design can t connect multiple frames together, but could be modified to do so, possibly by adding a connecting bar that attaches to the top of the leg bars. Implement Spherical Wheel: Our final design includes the use of spherical wheels. These are currently not in market and would require many parts to be designed for production. We would need to find a supplier to make 6-8 plastic hollow spheres. Currently they can only be made by machining down solid plastic rounds and end up costing around $300 a sphere. We also need to design an effective cage to house the components. We currently used a 3D printer, but this cost around $500 and it doesn t have the strength necessary to be used for the frame. Ideally our final version would be made of cast components where the cost would be dramatically decreased. Quick Release Connections: A quick release system for our brackets would be great improvement over the button cap screws we were using earlier. Some of the designs that we wish to implement in these brackets would be ether a clamping system used often on bicycles, or a wing nut style clamp that can easily be adjusted without the use of tools. This would require a revision of our brackets that we are currently using in our setup. Pearl Harness: The use of a modern harness with a belt would also increase the mobility of our device. These harnesses are available to market from the Pearl marching band catalog. They would allow the user to have a better connection to our device and therefore make it easier to rotate. Kickstand: To aid in attaching to and removing our device from the drummer we would like to add an easy access kickstand. We would have to design a bracket to hold the kickstand, and design it for easy access. It would also need to be able to be raised and dropped without the drummer needing to use their hands. 17


19 VIII. Appendices Appendix A: Pearl Catalog Products Product: Pearl CX Belt Price: $ Vendor: Product: Pearl PCX 200 Drum Bracket Price: $34.99 Vendor: Drum-Hardware/Drum-Percussion-Stands-Racks/Drum- Percussion-Racks/Rack-Clamps/PCX200-Pipe- Clamp.site7prod product 18
20 Appendix B: Drawing Package for Two-Wheeled Design 19
21 Appendix C: Drawing Package for Three-Wheeled Design 32
Folding Shopping Cart Design Report
 Folding Shopping Cart Design Report EDSGN 100 Section 010, Team #4 Submission Date- 10/28/2013 Group Image with Prototype Submitted by: Arafat Hossain, Mack Burgess, Jake Covell, and Connor Pechko (in
Folding Shopping Cart Design Report EDSGN 100 Section 010, Team #4 Submission Date- 10/28/2013 Group Image with Prototype Submitted by: Arafat Hossain, Mack Burgess, Jake Covell, and Connor Pechko (in
Introduction: Problem statement
 Introduction: Problem statement The goal of this project is to develop a catapult system that can be used to throw a squash ball the farthest distance and to be able to have some degree of accuracy with
Introduction: Problem statement The goal of this project is to develop a catapult system that can be used to throw a squash ball the farthest distance and to be able to have some degree of accuracy with
SAE Mini BAJA: Suspension and Steering
 SAE Mini BAJA: Suspension and Steering By Zane Cross, Kyle Egan, Nick Garry, Trevor Hochhaus Team 11 Progress Report Submitted towards partial fulfillment of the requirements for Mechanical Engineering
SAE Mini BAJA: Suspension and Steering By Zane Cross, Kyle Egan, Nick Garry, Trevor Hochhaus Team 11 Progress Report Submitted towards partial fulfillment of the requirements for Mechanical Engineering
M3 Design Product Teardown Kobalt Double-Drive Screwdriver
 19 Jun, 2013 Why do the product teardowns? M3 Design Product Teardown Kobalt Double-Drive Screwdriver Part of the product development process is to apply knowledge gained from prior experience during the
19 Jun, 2013 Why do the product teardowns? M3 Design Product Teardown Kobalt Double-Drive Screwdriver Part of the product development process is to apply knowledge gained from prior experience during the
M:2:I Milestone 2 Final Installation and Ground Test
 Iowa State University AerE 294X/AerE 494X Make to Innovate M:2:I Milestone 2 Final Installation and Ground Test Author(s): Angie Burke Christopher McGrory Mitchell Skatter Kathryn Spierings Ryan Story
Iowa State University AerE 294X/AerE 494X Make to Innovate M:2:I Milestone 2 Final Installation and Ground Test Author(s): Angie Burke Christopher McGrory Mitchell Skatter Kathryn Spierings Ryan Story
THE TORQUE GENERATOR OF WILLIAM F. SKINNER
 THE TORQUE GENERATOR OF WILLIAM F. SKINNER IN 1939, WHICH WAS THE START OF WORLD WAR TWO, WILLIAM SKINNER OF MIAMI IN FLORIDA DEMONSTRATED HIS FIFTH-GENERATION SYSTEM WHICH WAS POWERED BY SPINNING WEIGHTS.
THE TORQUE GENERATOR OF WILLIAM F. SKINNER IN 1939, WHICH WAS THE START OF WORLD WAR TWO, WILLIAM SKINNER OF MIAMI IN FLORIDA DEMONSTRATED HIS FIFTH-GENERATION SYSTEM WHICH WAS POWERED BY SPINNING WEIGHTS.
Linear Induction Motor (LIMO) Modular Test Bed for Various Applications
 Modular Test Bed for Various Applications") Linear Induction Motor (LIMO) Modular Test Bed for Various Applications ECE 4901 Senior Design I Fall 2013 Fall Project Report Team 190 Members: David Hackney Jonathan Rarey Julio Yela Faculty Advisor
Linear Induction Motor (LIMO) Modular Test Bed for Various Applications ECE 4901 Senior Design I Fall 2013 Fall Project Report Team 190 Members: David Hackney Jonathan Rarey Julio Yela Faculty Advisor
Operator s Manual. Single Hand Manual Drive Wheelchair
 Operator s Manual Single Hand Manual Drive Wheelchair Jordan R. Smith Kayla Gosse Leah McElhaney Team #5 Project for Client: Danielle Giroux Client Contact Information: Dave and Suzanne Giroux 53 Charlotte
Operator s Manual Single Hand Manual Drive Wheelchair Jordan R. Smith Kayla Gosse Leah McElhaney Team #5 Project for Client: Danielle Giroux Client Contact Information: Dave and Suzanne Giroux 53 Charlotte
SAE Mini BAJA: Suspension and Steering
 SAE Mini BAJA: Suspension and Steering By Zane Cross, Kyle Egan, Nick Garry, Trevor Hochhaus Team 11 Project Progress Submitted towards partial fulfillment of the requirements for Mechanical Engineering
SAE Mini BAJA: Suspension and Steering By Zane Cross, Kyle Egan, Nick Garry, Trevor Hochhaus Team 11 Project Progress Submitted towards partial fulfillment of the requirements for Mechanical Engineering
ROBOTICS BUILDING BLOCKS
 ROBOTICS BUILDING BLOCKS 2 CURRICULUM MAP Page Title...Section Estimated Time (minutes) Robotics Building Blocks 0 2 Imaginations Coming Alive 5...Robots - Changing the World 5...Amazing Feat 5...Activity
ROBOTICS BUILDING BLOCKS 2 CURRICULUM MAP Page Title...Section Estimated Time (minutes) Robotics Building Blocks 0 2 Imaginations Coming Alive 5...Robots - Changing the World 5...Amazing Feat 5...Activity
FOLDING SHOPPING CART
 1 EDSGN 100: Introduction to Engineering Design Section 10 Team 6 FOLDING SHOPPING CART Submitted by: Kevin Chacha, Ugonna Onyeukwu, Patrick Thornton, Brian Hughes Submitted to: Xinli Wu October 28, 2013
1 EDSGN 100: Introduction to Engineering Design Section 10 Team 6 FOLDING SHOPPING CART Submitted by: Kevin Chacha, Ugonna Onyeukwu, Patrick Thornton, Brian Hughes Submitted to: Xinli Wu October 28, 2013
Stationary Bike Generator System (Drive Train)
") Central Washington University ScholarWorks@CWU All Undergraduate Projects Undergraduate Student Projects Summer 2017 Stationary Bike Generator System (Drive Train) Abdullah Adel Alsuhaim cwu, 280zxf150@gmail.com
Central Washington University ScholarWorks@CWU All Undergraduate Projects Undergraduate Student Projects Summer 2017 Stationary Bike Generator System (Drive Train) Abdullah Adel Alsuhaim cwu, 280zxf150@gmail.com
SAE Baja - Drivetrain
 SAE Baja - Drivetrain By Ricardo Inzunza, Brandon Janca, Ryan Worden Team 11A Concept Generation and Selection Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering
SAE Baja - Drivetrain By Ricardo Inzunza, Brandon Janca, Ryan Worden Team 11A Concept Generation and Selection Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering
PRESEASON CHASSIS SETUP TIPS
 PRESEASON CHASSIS SETUP TIPS A Setup To-Do List to Get You Started By Bob Bolles, Circle Track Magazine When we recently set up our Project Modified for our first race, we followed a simple list of to-do
PRESEASON CHASSIS SETUP TIPS A Setup To-Do List to Get You Started By Bob Bolles, Circle Track Magazine When we recently set up our Project Modified for our first race, we followed a simple list of to-do
SUBJECT AREA(S): Amperage, Voltage, Electricity, Power, Energy Storage, Battery Charging
: Amperage, Voltage, Electricity, Power, Energy Storage, Battery Charging") Solar Transportation Lesson 4: Designing a Solar Charger AUTHOR: Clayton Hudiburg DESCRIPTION: In this lesson, students will further explore the potential and challenges related to using photovoltaics
Solar Transportation Lesson 4: Designing a Solar Charger AUTHOR: Clayton Hudiburg DESCRIPTION: In this lesson, students will further explore the potential and challenges related to using photovoltaics
9 Locomotive Compensation
 Part 3 Section 9 Locomotive Compensation August 2008 9 Locomotive Compensation Introduction Traditionally, model locomotives have been built with a rigid chassis. Some builders looking for more realism
Part 3 Section 9 Locomotive Compensation August 2008 9 Locomotive Compensation Introduction Traditionally, model locomotives have been built with a rigid chassis. Some builders looking for more realism
Stationary Bike Generator System
 Central Washington University ScholarWorks@CWU All Undergraduate Projects Undergraduate Student Projects Spring 2017 Stationary Bike Generator System Rakan Alghamdi Central Washington University, rk_rk11@hotmail.com
Central Washington University ScholarWorks@CWU All Undergraduate Projects Undergraduate Student Projects Spring 2017 Stationary Bike Generator System Rakan Alghamdi Central Washington University, rk_rk11@hotmail.com
MIPRover: A Two-Wheeled Dynamically Balancing Mobile Inverted Pendulum Robot
 ECE 3992 Senior Project Proposal MIPRover: A Two-Wheeled Dynamically Balancing Mobile Inverted Pendulum Robot 6 May 2005 Prepared By: Kevin E. Waters Department of Electrical and Computer Engineering University
ECE 3992 Senior Project Proposal MIPRover: A Two-Wheeled Dynamically Balancing Mobile Inverted Pendulum Robot 6 May 2005 Prepared By: Kevin E. Waters Department of Electrical and Computer Engineering University
Mechanisms and Structures. Mechanical Systems. Levers. Basic Forces
 Mechanisms and Structures Mechanical Systems Levers Basic Forces Pupil Name Teacher Class Page 1 MECHANICAL SYSTEMS Our every day lives are made much easier by a variety of mechanical systems that help
Mechanisms and Structures Mechanical Systems Levers Basic Forces Pupil Name Teacher Class Page 1 MECHANICAL SYSTEMS Our every day lives are made much easier by a variety of mechanical systems that help
Model Dual Function Planetary Gear Reducer
 Model 3210 Dual Function Planetary Gear Reducer I. OVERVIEW The Model 3210 Planetary Gear Reducer is an extremely robust, dual function power transmission device that combines a conventional (in line)
Model 3210 Dual Function Planetary Gear Reducer I. OVERVIEW The Model 3210 Planetary Gear Reducer is an extremely robust, dual function power transmission device that combines a conventional (in line)
Battery Technology for Data Centers and Network Rooms: Site Planning
 Battery Technology for Data Centers and Network Rooms: Site Planning White Paper # 33 Executive Summary The site requirements and costs for protecting information technology and network environments are
Battery Technology for Data Centers and Network Rooms: Site Planning White Paper # 33 Executive Summary The site requirements and costs for protecting information technology and network environments are
ECSE-2100 Fields and Waves I Spring Project 1 Beakman s Motor
 Names _ and _ Project 1 Beakman s Motor For this project, students should work in groups of two. It is permitted for groups to collaborate, but each group of two must submit a report and build the motor
Names _ and _ Project 1 Beakman s Motor For this project, students should work in groups of two. It is permitted for groups to collaborate, but each group of two must submit a report and build the motor
Simple Machines. The six simple machines are: Lever Wheel and Axle Pulley Inclined Plane Wedge Screw
 Simple Machines 1 Simple Machines Ancient people invented simple machines that would help them overcome resistive forces and allow them to do the desired work against those forces. 2 Simple Machines The
Simple Machines 1 Simple Machines Ancient people invented simple machines that would help them overcome resistive forces and allow them to do the desired work against those forces. 2 Simple Machines The
External Hard Drive: A DFMA Redesign
 University of New Mexico External Hard Drive: A DFMA Redesign ME586: Design for Manufacturability Solomon Ezeiruaku 4-23-2013 1 EXECUTIVE SUMMARY The following document serves to illustrate the effects
University of New Mexico External Hard Drive: A DFMA Redesign ME586: Design for Manufacturability Solomon Ezeiruaku 4-23-2013 1 EXECUTIVE SUMMARY The following document serves to illustrate the effects
Airframes Instructor Training Manual. Chapter 6 UNDERCARRIAGE
 Learning Objectives Airframes Instructor Training Manual Chapter 6 UNDERCARRIAGE 1. The purpose of this chapter is to discuss in more detail the last of the Four Major Components the Undercarriage (or
Learning Objectives Airframes Instructor Training Manual Chapter 6 UNDERCARRIAGE 1. The purpose of this chapter is to discuss in more detail the last of the Four Major Components the Undercarriage (or
SELECTING A MOBILITY SCOOTER
 SELECTING A MOBILITY SCOOTER This resource aims to assist you in identifying and selecting equipment to help with mobility issues and maintaining independence. Many daily activities require strength in
SELECTING A MOBILITY SCOOTER This resource aims to assist you in identifying and selecting equipment to help with mobility issues and maintaining independence. Many daily activities require strength in
Off Road Wheelchair. moltenrock.co.uk
 Off Road Wheelchair moltenrock.co.uk Boma 7 The Boma 7 is a lightweight, electrically powered all terrain wheelchair designed to be easily accessible, simple to use and incredibly capable off road. Boma
Off Road Wheelchair moltenrock.co.uk Boma 7 The Boma 7 is a lightweight, electrically powered all terrain wheelchair designed to be easily accessible, simple to use and incredibly capable off road. Boma
Detailed Design Review
 Detailed Design Review Reciprocating Friction Tester : Armature Subsystem Thursday December 4th, 2014 1 : Armature Subsystem Eric Kutil (ME): Project Manager Specialty: Solid Modeling and Machining Chris
Detailed Design Review Reciprocating Friction Tester : Armature Subsystem Thursday December 4th, 2014 1 : Armature Subsystem Eric Kutil (ME): Project Manager Specialty: Solid Modeling and Machining Chris
Connor Needham Roger Williams University Bristol, RI, United States. Jeremy Kacher Roger Williams University Bristol, RI, United States
 ASEE 2014 Zone I Conference, April 3-5, 2014, University of Bridgeport, Bridgpeort, CT, USA. Design of a Vertical Axis Wind Turbine for Urban Areas Hidden In Plain Sight Wind Energy Conservation System
ASEE 2014 Zone I Conference, April 3-5, 2014, University of Bridgeport, Bridgpeort, CT, USA. Design of a Vertical Axis Wind Turbine for Urban Areas Hidden In Plain Sight Wind Energy Conservation System
Reliable Reach. Robotics Unit Lesson 4. Overview
 Robotics Unit Lesson 4 Reliable Reach Overview Robots are used not only to transport things across the ground, but also as automatic lifting devices. In the mountain rescue scenario, the mountaineers are
Robotics Unit Lesson 4 Reliable Reach Overview Robots are used not only to transport things across the ground, but also as automatic lifting devices. In the mountain rescue scenario, the mountaineers are
Chapter 7: DC Motors and Transmissions. 7.1: Basic Definitions and Concepts
 Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
QuickStick Repeatability Analysis
 QuickStick Repeatability Analysis Purpose This application note presents the variables that can affect the repeatability of positioning using a QuickStick system. Introduction Repeatability and accuracy
QuickStick Repeatability Analysis Purpose This application note presents the variables that can affect the repeatability of positioning using a QuickStick system. Introduction Repeatability and accuracy
AUTOMATIC CLOSING WINDOW
 MECHANICAL ENGINEERING DEPARTMENT AUTOMATIC CLOSING WINDOW ASSESSMENT III- GRADUATION PROJECT Advisor: Dr. Emad Y. Tanbour Mohd. Abdul Mohsin Khan Mohd. Al- Ghamdi Nemer Saab Contents Introduction Problem
MECHANICAL ENGINEERING DEPARTMENT AUTOMATIC CLOSING WINDOW ASSESSMENT III- GRADUATION PROJECT Advisor: Dr. Emad Y. Tanbour Mohd. Abdul Mohsin Khan Mohd. Al- Ghamdi Nemer Saab Contents Introduction Problem
Lifting Mechanisms. Example 1: Two Stage Lift
 Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
Lifting Mechanisms The primary scoring method for the 2018 game is to deposit fuel cubes into scoring zones. A manipulator fixed to your robot can deliver fuel cubes into ground level scoring zones, but
INTRODUCTION Team Composition Electrical System
 IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
IGVC2015-WOBBLER DESIGN OF AN AUTONOMOUS GROUND VEHICLE BY THE UNIVERSITY OF WEST FLORIDA UNMANNED SYSTEMS LAB FOR THE 2015 INTELLIGENT GROUND VEHICLE COMPETITION University of West Florida Department
Steeda Sport Mustang Lowering Springs (2005+) - Installation Instructions
 - Installation Instructions") Steeda Sport Mustang Lowering Springs (2005+) - Installation Instructions The below installation instructions work for the following products: Steeda Sport Mustang Lowering Springs (2005+) Please read
Steeda Sport Mustang Lowering Springs (2005+) - Installation Instructions The below installation instructions work for the following products: Steeda Sport Mustang Lowering Springs (2005+) Please read
How to: Test & Evaluate Motors in Your Application
 How to: Test & Evaluate Motors in Your Application Table of Contents 1 INTRODUCTION... 1 2 UNDERSTANDING THE APPLICATION INPUT... 1 2.1 Input Power... 2 2.2 Load & Speed... 3 2.2.1 Starting Torque... 3
How to: Test & Evaluate Motors in Your Application Table of Contents 1 INTRODUCTION... 1 2 UNDERSTANDING THE APPLICATION INPUT... 1 2.1 Input Power... 2 2.2 Load & Speed... 3 2.2.1 Starting Torque... 3
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Simple Free-Energy Devices
 Simple Free-Energy Devices There is nothing magic about free-energy and by free-energy I mean something which produces output energy without the need for using a fuel which you have to buy. Chapter 11:
Simple Free-Energy Devices There is nothing magic about free-energy and by free-energy I mean something which produces output energy without the need for using a fuel which you have to buy. Chapter 11:
MIT ICAT M I T I n t e r n a t i o n a l C e n t e r f o r A i r T r a n s p o r t a t i o n
 M I T I n t e r n a t i o n a l C e n t e r f o r A i r T r a n s p o r t a t i o n Standard Flow Abstractions as Mechanisms for Reducing ATC Complexity Jonathan Histon May 11, 2004 Introduction Research
M I T I n t e r n a t i o n a l C e n t e r f o r A i r T r a n s p o r t a t i o n Standard Flow Abstractions as Mechanisms for Reducing ATC Complexity Jonathan Histon May 11, 2004 Introduction Research
COMMUTER SCOOTER. Design Team Andrew Bates, Christopher Holtzman Michael Lewon, Sant Vangavolu. Design Advisor Professor Jim Papadopoulos
 COMMUTER SCOOTER Design Team Andrew Bates, Christopher Holtzman Michael Lewon, Sant Vangavolu Design Advisor Professor Jim Papadopoulos Abstract In a city environment, most commuters take mass transit.
COMMUTER SCOOTER Design Team Andrew Bates, Christopher Holtzman Michael Lewon, Sant Vangavolu Design Advisor Professor Jim Papadopoulos Abstract In a city environment, most commuters take mass transit.
Thanks for Ordering The Kawasaki KLX Adjustable Lowering Kit From
 www.scootworks.com Thanks for Ordering The Kawasaki KLX Adjustable Lowering Kit From READ THIS BEFORE UNPACKING YOUR KIT! This instruction booklet contains detailed steps for installing the rear suspension
www.scootworks.com Thanks for Ordering The Kawasaki KLX Adjustable Lowering Kit From READ THIS BEFORE UNPACKING YOUR KIT! This instruction booklet contains detailed steps for installing the rear suspension
Problem Definition Review
 Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
Problem Definition Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team Agenda Background Problem Statement Stakeholders Use Scenario Customer Requirements Engineering Requirements Preliminary Schedule
Table of Contents. Executive Summary...4. Introduction Integrated System...6. Mobile Platform...7. Actuation...8. Sensors...9. Behaviors...
 TaleGator Nyal Jennings 4/22/13 University of Florida Email: Magicman01@ufl.edu TAs: Ryan Chilton Josh Weaver Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz Table of Contents Abstract...3 Executive
TaleGator Nyal Jennings 4/22/13 University of Florida Email: Magicman01@ufl.edu TAs: Ryan Chilton Josh Weaver Instructors: Dr. A. Antonio Arroyo Dr. Eric M. Schwartz Table of Contents Abstract...3 Executive
REU: Improving Straight Line Travel in a Miniature Wheeled Robot
 THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
Test Plans & Test Results
 P10227 Variable Intake System for FSAE Race Car Test Plans & Test Results By: Dave Donohue, Dan Swank, Matt Smith, Kursten O'Neill, Tom Giuffre Table of contents 1. MSD I: WKS 8-10 PRELIMINARY TEST PLAN...
P10227 Variable Intake System for FSAE Race Car Test Plans & Test Results By: Dave Donohue, Dan Swank, Matt Smith, Kursten O'Neill, Tom Giuffre Table of contents 1. MSD I: WKS 8-10 PRELIMINARY TEST PLAN...
How to choose correct battery(s).
.") www.ez-robot.com How to choose correct battery(s). Given the wide range of actuators and electronics which go into a robot, choosing the right battery may not be an easy task. This tutorial guides you
www.ez-robot.com How to choose correct battery(s). Given the wide range of actuators and electronics which go into a robot, choosing the right battery may not be an easy task. This tutorial guides you
A Cost Benefit Analysis of Faster Transmission System Protection Schemes and Ground Grid Design
 A Cost Benefit Analysis of Faster Transmission System Protection Schemes and Ground Grid Design Presented at the 2018 Transmission and Substation Design and Operation Symposium Revision presented at the
A Cost Benefit Analysis of Faster Transmission System Protection Schemes and Ground Grid Design Presented at the 2018 Transmission and Substation Design and Operation Symposium Revision presented at the
B&W Turnover Ball Installation
 B&W Turnover Ball Installation by Flopster843 02 Jan 2012 I wanted to start this article out by stating one very important thing. Installing a gooseneck hitch is not a task to be taken lightly. If you
B&W Turnover Ball Installation by Flopster843 02 Jan 2012 I wanted to start this article out by stating one very important thing. Installing a gooseneck hitch is not a task to be taken lightly. If you
Detailed Design Review
 Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Detailed Design Review P16241 AUTONOMOUS PEOPLE MOVER PHASE III Team 2 Agenda Problem Definition Review Background Problem Statement Project Scope Customer Requirements Engineering Requirements Detailed
Course. GNEG 1103 Introduction to Engineering. Assignment. Team Design Project. Project Selected. Solar Powered Stereo Cooler. Project Presentation
 Course GNEG 1103 Introduction to Engineering Assignment Team Design Project Project Selected Solar Powered Stereo Cooler Project Presentation April 23, 2014 Team Members Kenny Callis Ronny Akhaphong Alfredo
Course GNEG 1103 Introduction to Engineering Assignment Team Design Project Project Selected Solar Powered Stereo Cooler Project Presentation April 23, 2014 Team Members Kenny Callis Ronny Akhaphong Alfredo
MECH S Homework Concept Synthesis Due 12 Feb 14
 MECH 3200 14S Homework Concept Synthesis Due 12 Feb 14 Veterinary Prosthetics Consider a canine front double amputee (i.e., hind legs intact, but fore legs gone humerus removed from the scapula). The owners
MECH 3200 14S Homework Concept Synthesis Due 12 Feb 14 Veterinary Prosthetics Consider a canine front double amputee (i.e., hind legs intact, but fore legs gone humerus removed from the scapula). The owners
!! Describe different construction types of ground ladders. !! Identify the parts of a ladder including markings and labels.
 1 Essentials of Fire Fighting 6 th Edition Firefighter I Chapter 12 Ground Ladders Learning Objective 1 2 Describe different construction types of ground ladders. 12 2 Learning Objective 2 3 Identify the
1 Essentials of Fire Fighting 6 th Edition Firefighter I Chapter 12 Ground Ladders Learning Objective 1 2 Describe different construction types of ground ladders. 12 2 Learning Objective 2 3 Identify the
P15044 Intelligent Mobility Cane
 P15044 Intelligent Mobility Cane Name Major Role Allan Andranikian ME Lead Engineer Andrew Greeley ME Vibrations Lead Ben Stewart EE Sensors Lead Dan Chianucci CE Controls Lead Justine Nichols IE Project
P15044 Intelligent Mobility Cane Name Major Role Allan Andranikian ME Lead Engineer Andrew Greeley ME Vibrations Lead Ben Stewart EE Sensors Lead Dan Chianucci CE Controls Lead Justine Nichols IE Project
Eagle Park Health Care Facility
 Eagle Park Health Care Facility Ergonomic Trolley OHSAH Date: July 29/02 Occupational Health and Safety Agency for Healthcare #301 1195 West Broadway Vancouver, B.C. V6H 3X5 604.775.4034 www.ohsah.bc.ca
Eagle Park Health Care Facility Ergonomic Trolley OHSAH Date: July 29/02 Occupational Health and Safety Agency for Healthcare #301 1195 West Broadway Vancouver, B.C. V6H 3X5 604.775.4034 www.ohsah.bc.ca
Current set up for the Galley Table
 Double Ball Clamp SEG39138680 Students--Cypress Woods H.S. Texas, Clear Creek H.S. Texas, Grissom H.S. Alabama, Austin H.S. Alabama Teachers: Mike Bennett, Steve Britt, Bill Gibbs, Kyle Brakke, Bill Gibson
Double Ball Clamp SEG39138680 Students--Cypress Woods H.S. Texas, Clear Creek H.S. Texas, Grissom H.S. Alabama, Austin H.S. Alabama Teachers: Mike Bennett, Steve Britt, Bill Gibbs, Kyle Brakke, Bill Gibson
RDS. For Windows TORSION SPRING CALCULATOR For ROLLING DOORS Version 4 REFERENCE MANUAL
 RDS For Windows TORSION SPRING CALCULATOR For ROLLING DOORS Version 4 REFERENCE MANUAL TABLE OF CONTENTS TABLE OF CONTENTS INTRODUCTION CREATING THE WORKING COPY INSTALLATION GETTING STARTED i iii iv v
RDS For Windows TORSION SPRING CALCULATOR For ROLLING DOORS Version 4 REFERENCE MANUAL TABLE OF CONTENTS TABLE OF CONTENTS INTRODUCTION CREATING THE WORKING COPY INSTALLATION GETTING STARTED i iii iv v
Demystifying the Use of Frameless Motors in Robotics
 WHITEPAPER Demystifying the Use of Frameless Motors in Robotics TABLE OF CONTENTS EXECUTIVE SUMMARY: THE VALUE OF FRAMELESS MOTORS IN ROBOTICS ENGINEERS: WHY IS THIS ARTICLE FOR YOU? ADVANTAGES OF FRAMELESS
WHITEPAPER Demystifying the Use of Frameless Motors in Robotics TABLE OF CONTENTS EXECUTIVE SUMMARY: THE VALUE OF FRAMELESS MOTORS IN ROBOTICS ENGINEERS: WHY IS THIS ARTICLE FOR YOU? ADVANTAGES OF FRAMELESS
Introduction to Engineering Design 100. Foldable Shopping Cart
 1 Introduction to Engineering Design 100 Section 10 Team 7 Foldable Shopping Cart Submitted by: Nick Vuotto, Quoc Tran, Pete White, Mark Cecco (from left to right) Submitted to: Xinli Wu Spring 2014 2
1 Introduction to Engineering Design 100 Section 10 Team 7 Foldable Shopping Cart Submitted by: Nick Vuotto, Quoc Tran, Pete White, Mark Cecco (from left to right) Submitted to: Xinli Wu Spring 2014 2
Progress Report. Maseeh College of Engineering & Computer Science Winter Kart 2. Design Team Atom Falcone Austin Greene. Nick Vanklompenberg
 Progress Report Maseeh College of Engineering & Computer Science Winter 2016 Kart 2 Design Team Atom Falcone Austin Greene Jesse Majoros Nick Vanklompenberg Jake Waterman Jeffrey Williamson Faculty Advisor
Progress Report Maseeh College of Engineering & Computer Science Winter 2016 Kart 2 Design Team Atom Falcone Austin Greene Jesse Majoros Nick Vanklompenberg Jake Waterman Jeffrey Williamson Faculty Advisor
Performance evaluation for various braking systems of street motorcycles
 Performance evaluation for various braking systems of street motorcycles Introduction This report covers a series of motorcycle braking tests aimed at measuring the performance of the front brake and of
Performance evaluation for various braking systems of street motorcycles Introduction This report covers a series of motorcycle braking tests aimed at measuring the performance of the front brake and of
How to Build with the Mindstorm Kit
 How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
A Travel Aid for the Blind. Introduction to engineering design GE105
 A Travel Aid for the Blind Introduction to engineering design GE105 Presented by Supervised by Presentation Planning Introduction. Definition the problem. Need analysis. Primary objectives. Secondary object.
A Travel Aid for the Blind Introduction to engineering design GE105 Presented by Supervised by Presentation Planning Introduction. Definition the problem. Need analysis. Primary objectives. Secondary object.
Wireless Digital Repeater (WiDR) network's packaging/ Initial deployment review
 network's packaging/ Initial deployment review") Rochester Institute of Technology RIT Scholar Works Presentations and other scholarship 2006 Wireless Digital Repeater (WiDR) network's packaging/ Initial deployment review Margot Sandy Follow this and
Rochester Institute of Technology RIT Scholar Works Presentations and other scholarship 2006 Wireless Digital Repeater (WiDR) network's packaging/ Initial deployment review Margot Sandy Follow this and
Newton s First Law. Evaluation copy. Vernier data-collection interface
 Newton s First Law Experiment 3 INTRODUCTION Everyone knows that force and motion are related. A stationary object will not begin to move unless some agent applies a force to it. But just how does the
Newton s First Law Experiment 3 INTRODUCTION Everyone knows that force and motion are related. A stationary object will not begin to move unless some agent applies a force to it. But just how does the
4.4. Forces Applied to Automotive Technology. The Physics of Car Tires
 Forces Applied to Automotive Technology Throughout this unit we have addressed automotive safety features such as seat belts and headrests. In this section, you will learn how forces apply to other safety
Forces Applied to Automotive Technology Throughout this unit we have addressed automotive safety features such as seat belts and headrests. In this section, you will learn how forces apply to other safety
University Of California, Berkeley Department of Mechanical Engineering. ME 131 Vehicle Dynamics & Control (4 units)
") CATALOG DESCRIPTION University Of California, Berkeley Department of Mechanical Engineering ME 131 Vehicle Dynamics & Control (4 units) Undergraduate Elective Syllabus Physical understanding of automotive
CATALOG DESCRIPTION University Of California, Berkeley Department of Mechanical Engineering ME 131 Vehicle Dynamics & Control (4 units) Undergraduate Elective Syllabus Physical understanding of automotive
GNEG 1103 Introduction to Engineering FALL Team Design Project. Portable Phone Charger. Project Presentation. December 2, 2013, 8:00-9:15 A.
 1 GNEG 1103 Introduction to Engineering FALL 2013 Team Design Project Portable Phone Charger Project Presentation December 2, 2013, 8:00-9:15 A.M Derek Richard, Jarod Brunick, Luis Ramirez, Mason Torgerson
1 GNEG 1103 Introduction to Engineering FALL 2013 Team Design Project Portable Phone Charger Project Presentation December 2, 2013, 8:00-9:15 A.M Derek Richard, Jarod Brunick, Luis Ramirez, Mason Torgerson
Solar Power-Optimized Cart
 Solar Power-Optimized Cart Initial Project and Group Identification Document Due: September 17, 2013 Group #28 Group Members: Jacob Bitterman Cameron Boozarjomehri William Ellett Potential Sponsors: Duke
Solar Power-Optimized Cart Initial Project and Group Identification Document Due: September 17, 2013 Group #28 Group Members: Jacob Bitterman Cameron Boozarjomehri William Ellett Potential Sponsors: Duke
Micron MOTIONEERING. User s Guide. Table of Contents
 Micron MOTIONEERING User s Guide Table of Contents 1.0 Introduction 2.0 Sizing and Selection Mode 2.1 Primary Configuration 2.2 Application Types 2.3 Torque and Speed Requirements 2.4 The Motion Profile
Micron MOTIONEERING User s Guide Table of Contents 1.0 Introduction 2.0 Sizing and Selection Mode 2.1 Primary Configuration 2.2 Application Types 2.3 Torque and Speed Requirements 2.4 The Motion Profile
How to use the Multirotor Motor Performance Data Charts
 How to use the Multirotor Motor Performance Data Charts Here at Innov8tive Designs, we spend a lot of time testing all of the motors that we sell, and collect a large amount of data with a variety of propellers.
How to use the Multirotor Motor Performance Data Charts Here at Innov8tive Designs, we spend a lot of time testing all of the motors that we sell, and collect a large amount of data with a variety of propellers.
Toyota Landcruiser Rear Brake Upgrade Package
 May 2007 Toyota Landcruiser Rear Brake Upgrade Package 9 Nevada Ct Hoppers Crossing Vic 3029 Ph 03 97486950 Fax 03 97485965 Email hopstop@hoppers.com.au Web www.hoppers.com.au 2 THE INFORMATION CONTAINED
May 2007 Toyota Landcruiser Rear Brake Upgrade Package 9 Nevada Ct Hoppers Crossing Vic 3029 Ph 03 97486950 Fax 03 97485965 Email hopstop@hoppers.com.au Web www.hoppers.com.au 2 THE INFORMATION CONTAINED
Pearls from Martin J. King Quarter Wave Design
 Pearls from Martin J. King Quarter Wave Design An introduction by Bjorn Johannesen, Denmark. September the 1 st 2005. The first time you visit http://www.quarter-wave.com/, you might get overwhelmed by
Pearls from Martin J. King Quarter Wave Design An introduction by Bjorn Johannesen, Denmark. September the 1 st 2005. The first time you visit http://www.quarter-wave.com/, you might get overwhelmed by
OTK CHASSIS- SET UP GUIDE
 OTK CHASSIS- SET UP GUIDE Introduction This setup guide is created to facilitate a user of OTK equipment to reach an optimal chassis setup and on-track performance. The different tuning possibilities and
OTK CHASSIS- SET UP GUIDE Introduction This setup guide is created to facilitate a user of OTK equipment to reach an optimal chassis setup and on-track performance. The different tuning possibilities and
High Level Design ElecTrek
 High Level Design ElecTrek EE Senior Design November 9, 2010 Katie Heinzen Kathryn Lentini Neal Venditto Nicole Wehner Table of Contents 1 Introduction...3 2 Problem Statement and Proposed Solution...3
High Level Design ElecTrek EE Senior Design November 9, 2010 Katie Heinzen Kathryn Lentini Neal Venditto Nicole Wehner Table of Contents 1 Introduction...3 2 Problem Statement and Proposed Solution...3
Direct Drive Rotary An Increasingly Attractive Servo Choice
 Direct Drive Rotary An Increasingly Attractive Servo Choice DDR systems are available in frameless, housed and the newly developed Cartridge motor format. While many engineers are familiar with the basics
Direct Drive Rotary An Increasingly Attractive Servo Choice DDR systems are available in frameless, housed and the newly developed Cartridge motor format. While many engineers are familiar with the basics
Setup Guide and Chassis Tuning Tips (simple version) By Jim Daniels
 By Jim Daniels") This document is released into the public domain and may be reproduced and distributed in its entirety so long as all credit to Jim Daniels remains. If you find this guide helpful please consider donating
This document is released into the public domain and may be reproduced and distributed in its entirety so long as all credit to Jim Daniels remains. If you find this guide helpful please consider donating
By AM Customer: Dean Smith, Aug. 8, 2014.
 Ford Racing Bullitt Axle-Back Exhaust (05-09 GT, GT500) By AM Customer: Dean Smith, Aug. 8, 2014. Tools for the Job: 13mm Wrench 13mm Socket 15mm Socket 15mm Deep Socket Ratchet(s) [I used a bigger one
Ford Racing Bullitt Axle-Back Exhaust (05-09 GT, GT500) By AM Customer: Dean Smith, Aug. 8, 2014. Tools for the Job: 13mm Wrench 13mm Socket 15mm Socket 15mm Deep Socket Ratchet(s) [I used a bigger one
PROJECT IDEA SUBMISSION
 PROJECT IDEA SUBMISSION Team Contacts - 1 st person listed serves as the point of contact with Professor Nelson - Initial team size may be from 1 to 6 members (all members must agree to have their name
PROJECT IDEA SUBMISSION Team Contacts - 1 st person listed serves as the point of contact with Professor Nelson - Initial team size may be from 1 to 6 members (all members must agree to have their name
E. V. Gray Historical Series
 E. V. Gray Historical Series Secrets of the EMA4 and EMA5 Control Commutators (Still Unresolved) Mark McKay, PE While the technical revelations provided by the disassembly of Mr. Gray s custom electromagnets
E. V. Gray Historical Series Secrets of the EMA4 and EMA5 Control Commutators (Still Unresolved) Mark McKay, PE While the technical revelations provided by the disassembly of Mr. Gray s custom electromagnets
Foldable Shopping Cart EDSGN 100 Section 202 Team 3
 Foldable Shopping Cart EDSGN 100 Section 202 Team 3 http://personal.psu.edu/jnb5392/homepage.htm Submitted by: Alex Thomason Christian Sak Jeremy Deppen Jerod Barone Submitted to: Xinli Wu 30 July 2015
Foldable Shopping Cart EDSGN 100 Section 202 Team 3 http://personal.psu.edu/jnb5392/homepage.htm Submitted by: Alex Thomason Christian Sak Jeremy Deppen Jerod Barone Submitted to: Xinli Wu 30 July 2015
Orbital Test Stand. By Mary Begay, Brett Booen, Calvin Boothe, James Ellis and Nicholas Garcia. Team 7. Project Proposal Document
 Orbital Test Stand By Mary Begay, Brett Booen, Calvin Boothe, James Ellis and Nicholas Garcia Team 7 Project Proposal Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering
Orbital Test Stand By Mary Begay, Brett Booen, Calvin Boothe, James Ellis and Nicholas Garcia Team 7 Project Proposal Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering
New Low-Cost Design of Staircase Climbing Wheelchair
 New Low-Cost Design of Staircase Climbing Wheelchair Prof. Girish Sudhir Modak Prof. Dr. Manmohan M. Bhoomkar Assist.Professor of Mechanical Engineering Associate Professor of Mechanical Engineering PVG
New Low-Cost Design of Staircase Climbing Wheelchair Prof. Girish Sudhir Modak Prof. Dr. Manmohan M. Bhoomkar Assist.Professor of Mechanical Engineering Associate Professor of Mechanical Engineering PVG
ENGINEERED SOLUTIONS Based on Reali-Slim Bearings A N I L L U S T R A T E D M O U N T I N G G U I D E
 ENGINEERED SOLUTIONS Based on Reali-Slim Bearings A N I L L U S T R A T E D M O U N T I N G G U I D E Reali-Slim thin-section bearings have contributed to reductions in weight and size in thousands of
ENGINEERED SOLUTIONS Based on Reali-Slim Bearings A N I L L U S T R A T E D M O U N T I N G G U I D E Reali-Slim thin-section bearings have contributed to reductions in weight and size in thousands of
Emergi-Lite EMEX central power supply solutions
 Emergi-Lite EMEX central power supply solutions Reliable central back up power Available for AC/AC and AC/DC power supply systems Exceptional overload performance Entire modular build for quick and simple
Emergi-Lite EMEX central power supply solutions Reliable central back up power Available for AC/AC and AC/DC power supply systems Exceptional overload performance Entire modular build for quick and simple
Swerve Drive Selection Process. Cyber Blue 234 OCTOBER 2010 / Indiana Forums
 Swerve Drive Selection Process Cyber Blue 234 OCTOBER 2010 / Indiana Forums Background Cyber Blue had discussed wanting to try an omni-directional drive system for many years Recognized need for a lot
Swerve Drive Selection Process Cyber Blue 234 OCTOBER 2010 / Indiana Forums Background Cyber Blue had discussed wanting to try an omni-directional drive system for many years Recognized need for a lot
2 nd Generation Charging Station
 2 nd Generation Charging Station By Jasem Alhabashy, Riyadh Alzahrani, Brandon Gabrelcik, Ryan Murphy and Ruben Villezcas Team 13 Progress Report for ME486c Document Submitted towards partial fulfillment
2 nd Generation Charging Station By Jasem Alhabashy, Riyadh Alzahrani, Brandon Gabrelcik, Ryan Murphy and Ruben Villezcas Team 13 Progress Report for ME486c Document Submitted towards partial fulfillment
Exploration 4: Rotorcraft Flight and Lift
 Exploration 4: Rotorcraft Flight and Lift Students use appropriate terminology to describe the various stages of flight and discover that the lift force changes with the amount of air moved by the rotor
Exploration 4: Rotorcraft Flight and Lift Students use appropriate terminology to describe the various stages of flight and discover that the lift force changes with the amount of air moved by the rotor
FADEC (Full Authority Digital Engine Control) (SCF-SE-48) Notes 2017/ (I) PP
 (SCF-SE-48) Notes 2017/ (I) PP") FADEC (Full Authority Digital Engine Control) (SCF-SE-48) Notes 2017/5-1-106 (I) PP Abstract: Lasting 10 to 15 minutes, this presentation acquaints the audience with new engine control technology Format:
FADEC (Full Authority Digital Engine Control) (SCF-SE-48) Notes 2017/5-1-106 (I) PP Abstract: Lasting 10 to 15 minutes, this presentation acquaints the audience with new engine control technology Format:
[Human Power Dental Mixer] [Background Report]
![[Human Power Dental Mixer] [Background Report]](/thumbs/81/84008845.jpg "[Human Power Dental Mixer] [Background Report]") [Human Power Dental Mixer] [Background Report] By Mohammad Alenezi Abdulaziz Alkandary Fahd Alaskar Ebraheem Alnafjan Cooper Holden Abdalrahman Alrefaei February 17, 2017 Department of Mechanical Engineering
[Human Power Dental Mixer] [Background Report] By Mohammad Alenezi Abdulaziz Alkandary Fahd Alaskar Ebraheem Alnafjan Cooper Holden Abdalrahman Alrefaei February 17, 2017 Department of Mechanical Engineering
CHAPTER 2 FRUITS CONVEYOR SYSTEM
 14 CHAPTER 2 FRUITS CONVEYOR SYSTEM 2.1 INTRODUCTION In an on-line sorter, the conveyor system physically moves large quantities of fruits along the process line for sorting, grading and packing either
14 CHAPTER 2 FRUITS CONVEYOR SYSTEM 2.1 INTRODUCTION In an on-line sorter, the conveyor system physically moves large quantities of fruits along the process line for sorting, grading and packing either
Autonomously Controlled Front Loader Senior Project Proposal
 Autonomously Controlled Front Loader Senior Project Proposal by Steven Koopman and Jerred Peterson Submitted to: Dr. Schertz, Dr. Anakwa EE 451 Senior Capstone Project December 13, 2007 Project Summary:
Autonomously Controlled Front Loader Senior Project Proposal by Steven Koopman and Jerred Peterson Submitted to: Dr. Schertz, Dr. Anakwa EE 451 Senior Capstone Project December 13, 2007 Project Summary:
Supervised Learning to Predict Human Driver Merging Behavior
 Supervised Learning to Predict Human Driver Merging Behavior Derek Phillips, Alexander Lin {djp42, alin719}@stanford.edu June 7, 2016 Abstract This paper uses the supervised learning techniques of linear
Supervised Learning to Predict Human Driver Merging Behavior Derek Phillips, Alexander Lin {djp42, alin719}@stanford.edu June 7, 2016 Abstract This paper uses the supervised learning techniques of linear
Learning to Set-Up Your Warrior Drive Belt Arizona Warrior (Rev4) BEFORE GETTING STARTED
 BEFORE GETTING STARTED") BEFORE GETTING STARTED 1. A noise one guy calls 'howling' is the same noise another guy calls 'squealing' so unless you are both hearing the noise with your own ears its better to not assume a drive belt
BEFORE GETTING STARTED 1. A noise one guy calls 'howling' is the same noise another guy calls 'squealing' so unless you are both hearing the noise with your own ears its better to not assume a drive belt
Hidden Savings in Modern Manufacturing
 JARVIS CUTTING TOOLS CAPABILITIES Hidden Savings in Modern Manufacturing Five lessons from companies that found millions in hidden savings through simple, previously-overlooked changes to their manufacturing
JARVIS CUTTING TOOLS CAPABILITIES Hidden Savings in Modern Manufacturing Five lessons from companies that found millions in hidden savings through simple, previously-overlooked changes to their manufacturing
J&M Mustang Adjustable Panhard Rod (05-09) - Installation Instructions
 - Installation Instructions") J&M Mustang Adjustable Panhard Rod (05-09) - Installation Instructions The below installation instructions work for the following products: J&M Mustang Adjustable Panhard Rod (05-09) Please read through
J&M Mustang Adjustable Panhard Rod (05-09) - Installation Instructions The below installation instructions work for the following products: J&M Mustang Adjustable Panhard Rod (05-09) Please read through
Stopping Accuracy of Brushless
 Stopping Accuracy of Brushless Features of the High Rigidity Type DGII Series Hollow Rotary Actuator The DGII Series hollow rotary actuator was developed for positioning applications such as rotating a
Stopping Accuracy of Brushless Features of the High Rigidity Type DGII Series Hollow Rotary Actuator The DGII Series hollow rotary actuator was developed for positioning applications such as rotating a
Now you can get design flexibility and lasting performance from our complete family of AccuDrive Precision Products.
 ACCUDRIVE PRECISION PRODUCTS Now you can get design flexibility and lasting performance from our complete family of AccuDrive Precision Products. Series W Precision Servo Gearhead Output torque up to 8,500
ACCUDRIVE PRECISION PRODUCTS Now you can get design flexibility and lasting performance from our complete family of AccuDrive Precision Products. Series W Precision Servo Gearhead Output torque up to 8,500
INDIAN INSTITUTE OF TECHNOLOGY KHARAGPUR NPTEL ONLINE CERTIFICATION COURSE. On Industrial Automation and Control
 INDIAN INSTITUTE OF TECHNOLOGY KHARAGPUR NPTEL ONLINE CERTIFICATION COURSE On Industrial Automation and Control By Prof. S. Mukhopadhyay Department of Electrical Engineering IIT Kharagpur Topic Lecture
INDIAN INSTITUTE OF TECHNOLOGY KHARAGPUR NPTEL ONLINE CERTIFICATION COURSE On Industrial Automation and Control By Prof. S. Mukhopadhyay Department of Electrical Engineering IIT Kharagpur Topic Lecture
EDSGN 100: INTRODUCTION TO ENGINEERING DESIGN Section 204 Team #1 BOX CART
 EDSGN 100: INTRODUCTION TO ENGINEERING DESIGN Section 204 Team #1 BOX CART Submitted by: Chang - http://www.personal.psu.edu/cbl5289/ Vinay Murthy - http://www.personal.psu.edu/vum119/ Aidan Fitzpatrick
EDSGN 100: INTRODUCTION TO ENGINEERING DESIGN Section 204 Team #1 BOX CART Submitted by: Chang - http://www.personal.psu.edu/cbl5289/ Vinay Murthy - http://www.personal.psu.edu/vum119/ Aidan Fitzpatrick