DYNAMIC RESEARCH, INC. 355 Van Ness Avenue, STE 200 Torrance, California 90501
|
|
|
- Daniella Walters
- 5 years ago
- Views:
Transcription

1 OCAS-DRI-LDW NCAP LANE DEPARTURE WARNING CONFIRMATION TEST 2014 BMW X5 DYNAMIC RESEARCH, INC. 355 Van Ness Avenue, STE 200 Torrance, California February 2014 Final Report Prepared Under Contract No.:DTNH22-08-D U. S. DEPARTMENT OF TRANSPORTATION National Highway Traffic Safety Administration Office of Crash Avoidance Standards Mail Code: NVS New Jersey Avenue SE Washington, DC 20590
2 Prepared for the Department of Transportation, National Highway Traffic Safety Administration, under Contract No. DTNH22-08-D This publication is distributed by the U.S. Department of Transportation, National Highway Traffic Safety Administration, in the interest of information exchange. The opinions, findings, and conclusions expressed in this publication are those of the author(s) and not necessarily those of the Department of Transportation or the National Highway Traffic Safety Administration. The United States Government assumes no liability for its contents or use thereof. If trade or manufacturer's names or products are mentioned, it is only because they are considered essential to the object of the publication and should not be construed as an endorsement. The United States Government does not endorse products of manufacturers. Prepared By: John Lenkeit Approved By: Nadine Wong Approval Date: 13 February 2014 ii
3 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. OCAS-DRI-LDW Title and Subtitle Final Report of Lane Departure Warning Testing of a 2014 BMW X5. 5. Report Date 13 February Performing Organization Code 7. Author(s) John F. Lenkeit, Technical Director Brian Kebschull, Principal Engineer 9. Performing Organization Name and Address Dynamic Research, Inc. 355 Van Ness Ave, STE 200 Torrance, CA Sponsoring Agency Name and Address U.S. Department of Transportation National Highway Traffic Safety Administration Office of Crash Avoidance Standards 1200 New Jersey Avenue, SE, West Building, 4th Floor (NVS-120) Washington, D.C Supplementary Notes DRI 8. Performing Organization Report No. DRI-TM Work Unit No. 11. Contract or Grant No. DTNH22-08-D Type of Report and Period Covered Final Test Report December 2013 February Sponsoring Agency Code NVS Abstract These tests were conducted on the subject 2014 BMW X5 in accordance with the specifications of the Office of Crash Avoidance Standards most current Test Procedure in docket NHTSA to confirm the performance of a lane departure warning system. The vehicle passed the requirements of the test for all three lane marking types and for both directions. 17. Key Words 18. Distribution Statement Lane Departure Warning, LDW, New Car Assessment Program, NCAP 19. Security Classif. (of this report) Unclassified 20. Security Classif. (of this page) Unclassified Copies of this report are available from the following: NHTSA Technical Reference Division National Highway Traffic Safety Administration 1200 New Jersey Avenue, SE Washington, D.C No. of Pages 22. Price 98 iii
4 TABLE OF CONTENTS SECTION PAGE I. INTRODUCTION... 1 II. DATA SHEETS... 2 A. Data Sheet 1: Test Summary... 3 B. Data Sheet 2: Vehicle Data... 4 C. Data Sheet 3: Test Conditions... 6 D. Data Sheet 4: Lane Departure Warning System Operation... 8 III. TEST PROCEDURES A. Test Procedure Overview B. Lane Delineation Markings C. Test Validity D. Pass/Fail Criteria E. Instrumentation Appendix A Photographs... A-1 Appendix B Excerpts from Owner's Manual... B-1 Appendix C Run Logs... C-1 Appendix D Time Histories... D-1 iv
5 Section I INTRODUCTION The purpose of the testing reported herein was to confirm the performance of a Lane Departure Warning (LDW) system installed on a 2014 BMW X5. The LDW system for this vehicle provides a tactile alert implemented via a vibration felt in the steering wheel.. The vehicle passed the requirements of the test for all three lane marking types and for both directions. The test procedure is described in detail in the NHTSA Document "LANE DEPARTURE WARNING SYSTEM CONFIRMATION TEST" from March of Its purpose is to confirm the performance of Lane Departure Warning (LDW) systems installed on light vehicles with gross vehicle weight ratings (GVWR) of up to 10,000 lb. Current LDW technology relies on sensors to recognize a lane delimiting edge line. As such, the test procedures described in the document rely on painted or taped lines or Botts Dots being present on the test course to emulate those found on public roadways. Although it is impossible to predict what technologies could be used by future LDW systems (e.g., magnetic markers, RADAR reflective striping, ultra violet paint, infra red, etc.), it is believed that minor modifications to these procedures, when deemed appropriate, could be used to accommodate the evaluation of alternative or more advanced LDW systems. 1
6 Section II DATA SHEETS 2
7 LANE DEPARTURE WARNING DATA SHEET 1: TEST SUMMARY 2014 BMW X5 VIN: 5UXKR2C57E0Cxxxx Test Date: 12/11/2013 Lane Departure Warning setting: On Test 1 Continuous White Line Left: Pass Right: Pass Test 2 Dashed Yellow Line Left: Pass Right: Pass Test 3 Botts Dots Left: Pass Right: Pass Overall: Pass 3
8 LANE DEPARTURE WARNING DATA SHEET 2: GENERAL TEST AND VEHICLE PARAMETER DATA (Page 1 of 2) 2014 BMW X5 TEST VEHICLE INFORMATION VIN: 5UXKR2C57E0Cxxxx Body Style: SUV Color: Black Date Received: 12/9/2013 Odometer Reading: 12 mi Engine: 3 L Inline 6 Transmission: Final Drive: Automatic RWD Is the vehicle equipped with: ABS X Yes No Adaptive Cruise Control X Yes No Collision Mitigating Brake System X Yes No DATA FROM VEHICLE'S CERTIFICATON LABEL Vehicle m anufactured by: Dat e of m anuf act ure: Bayerische Moteren Werke AG 09/2013 DATA FROM TIRE PLACARD: Tires size as st at ed o n Tire Placar d : Front: 255/50R19 Rear: 255/50R19 Recom m ended cold tire pressure: Front: 250 kpa (35 psi) Rear: 300 kpa (44 psi) 4
9 LANE DEPARTURE WARNING DATA SHEET 2: GENERAL TEST AND VEHICLE PARAMETER DATA (Page 2 of 2) 2014 BMW X5 TIRES Tire manufacturer and model: Front tire size: Rear tire size: Michelin Latitude Tour HP 255/50R19 255/50R19 VEHICLE ACCEPTANCE Verify the following before accepting the vehicle X All options listed on the window sticker are present on the test vehicle X Tires and wheel rims are the same as listed. X There are no dents or other interior or exterior flaws. X The vehicle has been properly prepared and is in running condition. X Verify that spare tire, jack, lug wrench, and tool kit (if applicable) is located in the vehicle cargo area. 5
10 LANE DEPARTURE WARNING DATA SHEET 3: TEST CONDITIONS (Page 1 of 2) 2014 BMW X5 GENERAL INFORMATION Test date: 12/11/2013 AMBIENT CONDITIONS Air temperature: Wind speed: 10.0 C (50 F) 1.5 m/s (3.5 mph) X X X Wind speed 10 m /s (22 m ph) Tests were not perform ed during periods of inclem ent weather. Th is includes, but is not limited to, rain, snow, hail, fog, smoke, or ash. Tests were conducted during daylight hours with good atmospheric visibility (defined as an absence of fog and the ability to see clearly for m ore than 5000 m eters). The tests were not conducted with the vehicle oriented into the sun during very low sun angle conditions, where the sun is oriented 15 degrees or less from horizontal, and camera washout or syst em ino p er ab ilit y r esult s. VEHICLE PREPARATION Verify the following: All non consumable fluids at 100 % capacity : Fuel tank is full: Tire pressures are set to m anufacturer's recom m ended cold tire pressure: X X X Front: 250 kpa (35 psi) Rear: 300 kpa (44 psi) 6
11 LANE DEPARTURE WARNING DATA SHEET 3: TEST CONDITIONS (Page 2 of 2) 2014 BMW X5 WEIGHT Weight of vehicle as tested including driver and instrumentation Left Front: kg (1167 lb) Right Front kg (1198 lb) Left Rear kg (1281 lb) Right Rear kg (1268 lb) Total: kg (4914 lb) 7
12 LANE DEPARTURE WARNING DATA SHEET 4: LANE DEPARTURE WARNING SYSTEM OPERATION (Page 1 of 3) 2014 BMW X5 How is the Forward Collision Warning presented to the driver? (Check all t hat apply) Warning light Buzzer or audible alarm X Vibration Ot h er Describe the m ethod by which the driver is alerted. For exam ple, if the warning is a light, where is it located, its color, size, words or symbol, does it flash on and off, etc. If it is a sound, describe if it is constant beep or a repeated beep. If it is a vibration, describe where it is felt (e.g., pedals, steering wheel), the dominant frequency (and possibly magnitude).the type of warning (light, audible, vibration, or combination) etc. The driver is alerted via a tactile alert felt in the steering wheel as the vehicle passes over the lane markings. The primary frequency of the vibration is approximately 51 Hz. 8
13 LANE DEPARTURE WARNING DATA SHEET 4: LANE DEPARTURE WARNING SYSTEM OPERATION (Page 2 of 3) 2014 BMW X5 Is the vehicle equipped with a switch whose purpose is to render LDW inoperable? X Yes No If yes please provide a full description including the switch location and method of operat ion, any associat ed instrument panel indicator, etc. A switch located in the middle of the center console underneath the switch for hazard lights allows the system to be turned off. The switch has a picture of a vehicle as seen from above surrounded by a illuminated green light. Pressing the switch once brings up the "Intelligent Safety" menu. Once in the "Intelligent Safety" menu, the user can select "Lane Departure Warning" and toggle the system between "On" and "Off" by pressing the switch once. Is the vehicle equipped with a control whose purpose is to adjust the range setting or otherwise influence the operation of LDW? If yes please provide a full description X Yes No 9
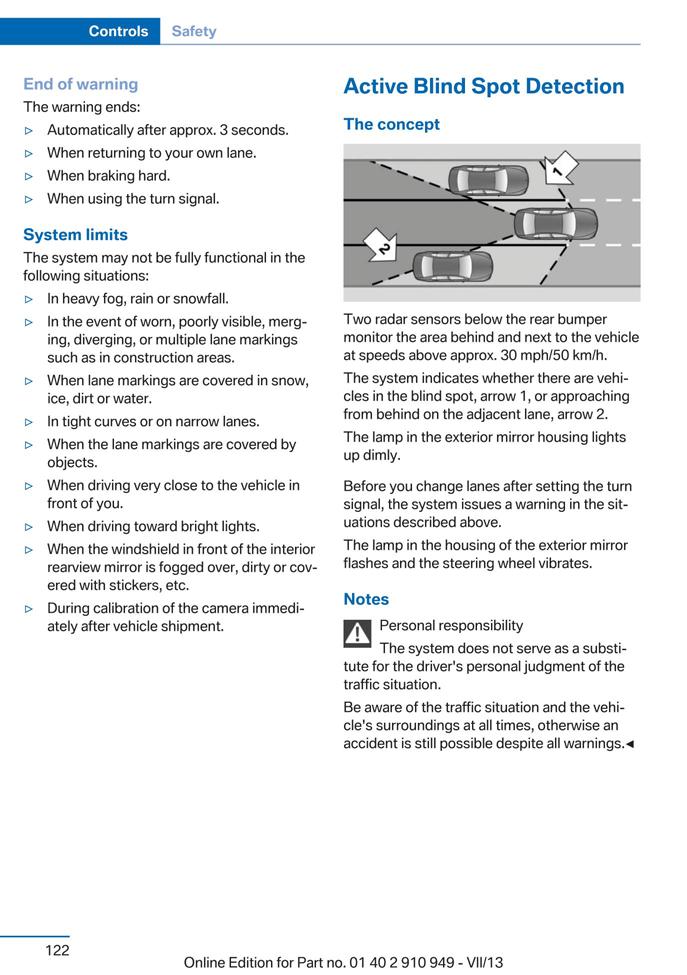
14 LANE DEPARTURE WARNING DATA SHEET 4: LANE DEPARTURE WARNING SYSTEM OPERATION (Page 3 of 3) 2014 BMW X5 Are there other driving modes or conditions that render LDW inoperable or reduce its effectiveness? If yes please provide a full description. Functional Limitations: - Heavy fog, rain, snowfall - In the event of worn, poorly visible, merging, diverging, or multiple lane marking such as in construction areas - When lane markings are covered in snow, ice, dirt or water - In tight curves or on narrow lanes - When the lane markings are covered by objects - When driving very close to the vehicle in front of you - When driving toward bright lights - When the windshield behind the interior rearview mirror is fogged over, dirty or covered with stickers, etc. - During the calibration process of the camera immediately after vehicle shipment X Yes No 10
15 Section III TEST PROCEDURES A. Test Procedure Overview Each LDW test involved one of three lane marking types: solid white lines, dashed yellow lines, or Botts Dots. Lane departures were done both to the left and to the right, and each test condition was repeated five times, as shown in Table 1. Lane Geometry Table 1. LDW Test Matrix Departure Line Type Number of Trials Direction Straight Solid Dashed Botts Dots L 5 R 5 L 5 R 5 L 5 R 5 Prior to the start of a test series involving a given lane marking type and departure direction combination, the accuracy of the distance to lane marking measurement was verified. This was accomplished by driving the vehicle to the approximate location at which the lane departure would occur and placing the tire at the lane marking edge of interest (i.e., distance to lane marking = 0). The realtime display of distance to the lane marking was then observed to verify that the measured distance was within the tolerance (5 cm). If the measured distance was found to be greater than the tolerance, the instrumentation setup was checked and corrected, if necessary. If the measured distance was found to be within the tolerance, the instrumentation setup was considered appropriate and the test series was begun. To begin the maneuver, the vehicle was accelerated from rest to a test speed of 72.4 km/h (45 mph), while being driven in a straight line parallel to the lane marking of interest, with the centerline of the vehicle approximately 1.83m (6.0 ft) from the lane edge (i.e., such that the vehicle would pass through the center of the start gate). The test speed was achieved at least 60 m (200 ft) before the start gate was reached. Striking any start gate cones was not permitted, and any run in which a cone was struck was considered to be invalid. Also, during the initialization and test phases, the test driver avoided using turn 11
16 signals and avoided applying any sudden acceleration, sudden steering or sudden braking, and any use of the turn signals, sudden acceleration, sudden steering or sudden braking invalidated the test trial. Data collection began with the vehicle at least 60 m (200 ft) from the start gate, which was configured using a pair of non-reflective, low-contrast color traffic cones. A second set of cones, placed 6 m (20 ft) longitudinally before the start gate, was used to guide the driver into the start gate. The lateral width between the cone pairs was 20 cm (8 in) greater than the width of the vehicle, and the centerline of each pair was laterally offset from the lane marking by 1.8 m (6 ft). Once the driver passed the gate, the driver manually input sufficient steering to achieve a lane departure with a target lateral velocity of 0.5 m/s with respect to the lane line. As shown in Fig 1, two additional non-reflective cones were used to guide the driver in making this steering maneuver. Throughout the maneuver the driver modulated the throttle, or used cruise control, as appropriate, such that vehicle speed remained at constant speed. The test was considered complete when the vehicle crossed at least 1 m (3.3 ft) over the lane edge boundary. 90 m (300 ft) 60 m (200 ft) Lane marking 1.8 m (6 ft) W + 20 cm (8 in) W Test Vehicle 1.8 m (6 ft) 1.8 m (6 ft) 6 m (20 ft) Test start point (start gate) Pylons used to assist the driver achieve acceptable lateral velocity Figure 1. Position of Cones Used to Assist Driver Data collected included vehicle speed, position, and yaw rate. In addition to cone strikes, vehicle speed and yaw rate data were used to identify invalid runs as described in Section C below. Data from trials where speed or yaw rate were outside of the performance specification were not considered valid. B. Lane Delineation Markings The Office of Crash Avoidance Standards Test Procedure for the confirmation of a lane departure warning system contains a requirement that all lane markings 12
17 meet USDOT specifications as described in the Manual on Uniform Traffic Control Devices (MUTCD) and be considered in very good condition. 1. Lane Marker Width The width of the edge line marker was 10 to 15 cm (4 to 6 in). This is considered to be a normal width for longitudinal pavement markings under Section 3A.05 of the MUTCD. 2. Line Marking Color and Reflectivity Lane marker color and reflectivity met all applicable standards. These standards include those from the International Commission of Illumination (CIE) for color and the American Society for Testing and Materials (ASTM) on lane marker reflectance. 3. Line Styles The tests described in this document required the use of three lane line configurations: continuous solid white, discontinuous dashed yellow, and discontinuous with raised pavement markers. Continuous White Line A continuous white line is defined as a white line that runs for the entire length of the test course. Dashed Yellow Line As stated in the Manual on Uniform Traffic Control Devices (MUTCD), and as shown in Figure 2, a discontinuous dashed yellow line is defined as by a series of 3 m (10 ft) broken (dashed) yellow line segments, spaced 9.1 m (30 ft) apart. Raised Pavement Marker Line (Botts Dots) California Standard Plans indicates raised pavement markers are commonly used in lieu of painted strips for marking roads in California. Other states, mainly in the southern part of the United States, rely on them as well. These markers may be white or yellow, depending on the specific application, following the same basic colors of their analogous white and yellow painted lines. Following the California 2006 Standard Plans, three types of raised pavement markings are used to form roadway lines. It is believed that these types of roadway markings are the hardest for an LDW sensor system to process. Type A and Type AY are non-reflective circular domes that are approximately 10 cm (4 in) in diameter and approximately 1.8 cm (0.7 13
18 in) high. Type C and D are square markings that are retro reflective in two directions measuring approximately 10 x 10 x 5 cm (4 x 4 x 0.5 in), and Type G and H that are the same as C and D only retro reflective in a single direction. For the tests described in this document, raised pavement markers were set up following California Standard Plan A20A, Detail 4 as shown in Figure 3. Note that in this figure, the squares are Type D yellow reflectors and the circles are yellow Type AY discs. 10' 30' 10' Figure 2. MUTCD Discontinuous Dashed Line Specifications 48' 8' 8' 16' 8' 8' 4' 4' Yellow Type AY discs Yellow Type D reflectors Figure 3. California Standard Plan A20A, Detail 4 14
19 C. Test Validity 1. Speed All LDW tests were conducted at 72.4 km/h (45 mph). Test speed was monitored and a test was considered valid if the test speed remained within ± 2 km/h (± 1.2 mph) of the 72.4 km/h (45 mph) target speed. It was required that the speed must remain within this window from the start of the test until any part of the vehicle crossed a lane line by 1 m (3.3 ft) or more. 2. Lateral Velocity All tests were conducted with a lateral velocity of 0.1 to 0.6 m/s (0.3 to 2.0 ft/s), measured with respect to the lane line at the time of the alert. To assist the test driver in being able to efficiently establish the target lateral velocity, cones were positioned in the manner shown in Figure Yaw Rate It was required that the magnitude of the vehicle s yaw rate could not exceed 1.0 deg/sec at any time during lane departure maneuver, from the time the vehicle passes through the start gate to the instant the vehicle has crossed a lane line by 1 m (3.3 ft). D. Pass/Fail Criteria The measured test data were used to determine the pass/fail outcome for each trial. The outcome was based on whether the LDW produced an appropriate alert during the maneuver. In the context of this test procedure, a lane departure is said to occur when any part of the two dimensional polygon used to represent the test vehicle breaches the inboard lane line edge (i.e., the edge of the line closed to the vehicle before the departure occurs). In the case of tests performed in this procedure, the front corner of the polygon, defined as the intersection of center of the front wheels (longitudinally) with the outboard edge of the front tire (laterally), crossed the line edge first. So, for example, if the vehicle departed its lane to the left, the left front corner of the polygon would first breach the lane line edge. For an individual trial to be considered a pass : o Test speed, lateral velocity, and yaw rate validity conditions must be satisfied. o The LDW alert must not occur when the lateral position of the vehicle 15
20 is greater than 0.75 m (2.5 ft) from the lane line edge (i.e., prior to the lane departure). o The LDW alert must occur before the lane departure exceeds 0.3 m (1.0 ft). For an overall Pass the LDW system must satisfy the pass criteria for 3 of 5 individual trials for each combination of departure direction and lane line type (60 percent), and pass 20 of the 30 trials overall (66 percent). E. Instrumentation Table 2 lists the sensors, signal conditioning and data acquisition equipment used for these tests. 16
21 Table 2. Test Instrumentation and Equipment Tire Pressure Gauge Type Output Range Platform Scales Differential Global Positioning System Multi-Axis Inertial Sensing System Real-Time Calculation of Position and Velocity Relative to Lane Markings (LDW) and POV (FCW) Vehicle Tire Pressure Vehicle Total, Wheel, and Axle Load Position, Velocity Position; Longitudinal, Lateral, and Vertical Accels; Lateral, Longitudinal and Vertical Velocities; Roll, Pitch, Yaw Rates; Roll, Pitch, Yaw Angles Distance and Velocity to lane markings (LDW) and POV (FCW) psi kpa 8000 lb 35.6 kn Latitude: ±90 deg Longitude: ±180 deg Altitude: 0-18 km Velocity: knots Latitude: ±90 deg Longitude: ±180 deg Altitude: 0-18 km Velocity: knots Accel: ±100 m/s 2 Angular Rate: ±100 deg/s Angular Disp: ±180 deg Lateral Lane Dist: ±30 m Lateral Lane Velocity: ±20 m/sec Longitudinal Range to POV: ±200 m Longitudinal Range Rate: ±50 m/sec Accuracy, Other Primary Specs 0.5 psi 3.45 kpa ±1.0% of applied load Horizontal Position: ±1 cm Vertical Position: ±2 cm Velocity: 0.05 km/h Position: ±2 cm Velocity: 0.05 km/h Accel: 0.01% of full range Angular Rate: 0.01% of full range Roll/Pitch Angle: ±0.03 deg Heading Angle: ±0.1 deg Lateral Distance to Lane Marking: ±2 cm Lateral Velocity to Lane Marking: ±0.02m/sec Longitudinal Range: ±3 cm Longitudinal Range Rate: ±0.02 m/sec Ashcroft, D1005PS Mfr, Model Intercomp, SWII Trimble GPS Receiver, 5700 (base station and in-vehicle) Oxford Technical Solutions (OXTS), Inertial+ Oxford Technical Solutions (OXTS), RT-Range Serial Number NT NA NA Calibration Dates Last Due 1/23/2013 1/23/2014 1/30/2013 1/30/2014 2/8/2012 2/8/2014 2/7/2012 2/
22 Type Output Range Data Acquisition System [Includes amplification, antialiasing, and analog to digital conversion.] Microphone Light Sensor Accelerometer Coordinate Measurement Machine Record Time; Position; Velocity; Distance to lane markings; Headway distance; Closing Velocity; Lateral, Longitudinal, and Vertical Accels; Roll, Yaw, and Pitch Rates; Roll, Yaw and Pitch Angles. Sound (to measure time at alert) Light intensity (to measure time at alert) Acceleration (to measure time at alert) Inertial Sensing System Coordinates Sufficient to meet or exceed individual sensors Max SPL: 139 db/spl Frequency Response: 40 Hz 20 khz Spectral Bandwidth: nm Accuracy, Other Primary Specs Sound digitized at 10 khz, all other channels digitized at 100 Hz. Accuracy is sufficient to meet or exceed individual sensors 3 db over Freq. Resp. Range Rise time < 10 msec ±5g 3% of full range 0-8 ft m ±.0020 in. ±.051 mm (Single point articulation accuracy) Mfr, Model SoMat, edaq ECPU processor SoMat, High level Board EHLS Sennheiser, e614 DRI designed and developed Light Sensor Silicon Designs, Faro Arm, Fusion Serial Number MSHLB MSHLS NA NA NA UO Calibration Dates Last Due 4/24/13 4/24/14 NA NA NA 1/4/2013 1/4/
23 As part of the pre-test instrumentation verification process, the tonal frequency of the audible warning or the vibration frequency of the tactile warning (if present) was determined through use of the PSD (Power Spectral Density) function in Matlab. This was accomplished in order to identify the center frequency around which a band-pass filter was applied to subsequent audible or tactile warning data so that the beginning of such warnings could be programmatically determined. The bandpass filter used for these warning signals was a phaseless, forward-reverse pass, elliptical (Cauer) digital filter, with filter parameters as listed in Table 3. Table 3. Audible and Tactile Warning Filter Parameters Warning Type Filter Order Peak-to- Peak Ripple Minimum Stop Band Attenuation Audible 5 th 3 db 60 db Tactile 5 th 3 db 60 db Pass-Band Frequency Range Identified Center Frequency ± 5% Identified Center Frequency ± 20% 19
24 APPENDIX A Photographs
25 LIST OF FIGURES Page Figure A1. Front View of Subject Vehicle. A-3 Figure A2. Rear View of Subject Vehicle..... A-4 Figure A3. Window Sticker (Monroney Label)... A-5 Figure A4. Vehicle Certification Label... A-6 Figure A5. DGPS and Inertial Measurement Unit Installed in Subject Vehicle... A-7 Figure A6. Data Acquisition System Installed in Subject Vehicle... A-8 Figure A7. Computer Installed in Subject Vehicle... A-9 Figure A8. Sensor for Detecting Haptic Alert... A-10 Figure A9. LDW Visual Display... A-11 Figure A10. Intelligent Safety Button, LDW On/Off... A-12 Figure A11. LDW On/Off Menus... A-13

26 Figure A1. Front View of Subject Vehicle

27 Figure A2. Rear View of Subject Vehicle

28 Figure A3. Window Sticker (Monroney Label)

29 Figure A4. Vehicle Certification Label

30 Figure A5. DGPS and Inertial Measurement Unit Installed in Subject Vehicle

31 Figure A6. Data Acquisition System Installed in Subject Vehicle

32 Figure A7. Computer Installed in Subject Vehicle

33 Figure A8. Sensor for Detecting Haptic Alert

34 Figure A9. LDW Visual Display

35 Figure A10. Intelligent Safety Button, LDW On/Off

36 Figure A11. LDW On/Off Menus
37 APPENDIX B Excerpts from Owner s Manual
38
39
40
41
42 APPENDIX C Run Log
43 Subject Vehicle: 2014 BMW X5 Date: 12/11/2013 Driver: N. Wong Run Lane Marking Type Departure Direction Valid Run? Distance at HapticAlert (ft) Pass/Fail Notes 1 Solid Left Y 0.46 Pass 2 Y 0.45 Pass 3 Y 0.43 Pass 4 Y 0.19 Pass 5 Y 0.46 Pass 6 Y 0.23 Pass 7 Y 0.29 Pass 8 Solid Right Y 0.64 Pass 9 Y 0.82 Pass 10 Y 0.72 Pass 11 Y 0.76 Pass
44 Subject Vehicle: 2014 BMW X5 Date: 12/11/2013 Driver: N. Wong Run Lane Marking Type Departure Direction Valid Run? Distance at HapticAlert (ft) Pass/Fail Notes 12 Y 0.66 Pass 13 Solid Right Y 0.69 Pass 14 Y 0.73 Pass 15 Dashed Right Y 0.83 Pass 16 Y 0.80 Pass 17 Y 0.87 Pass 18 Y 0.63 Pass 19 Y 0.73 Pass 20 Y 0.73 Pass 21 Y 0.78 Pass 22 Dashed Left Y 1.07 Pass
45 Subject Vehicle: 2014 BMW X5 Date: 12/11/2013 Driver: N. Wong Run Lane Marking Type Departure Direction Valid Run? Distance at HapticAlert (ft) Pass/Fail Notes 23 Y 0.53 Pass 24 N hit cone 25 Dashed Left Y 0.28 Pass 26 Y 0.35 Pass 27 Y 0.36 Pass 28 Y 0.32 Pass 29 Y 0.23 Pass 30 Botts Left Y 0.34 Pass 31 Y 0.27 Pass 32 N yaw rate & lat velocity high 33 Y 0.06 Pass 34 N yaw rate high
46 Subject Vehicle: 2014 BMW X5 Date: 12/11/2013 Driver: N. Wong Run Lane Marking Type Departure Direction Valid Run? Distance at HapticAlert (ft) Pass/Fail Notes 35 Y 0.28 Pass 36 Y 0.26 Pass 37 Y 0.18 Pass 38 Botts Left Y Pass 39 Botts Right Y 0.76 Pass 40 Y 0.64 Pass 41 N hit cones 42 Y 0.64 Pass 43 Y 0.61 Pass 44 Y 0.58 Pass 45 Y 0.56 Pass 46 Y 0.61 Pass
47
48 APPENDIX D Time History Plots D-1
49 LIST OF FIGURES Page Figure D1. Example Time History for Lane Departure Warning Test, Passing... D-7 Figure D2. Example Time History for Lane Departure Warning Test, Failing, No Warning Issued... D-8 Figure D3. Example Time History for Lane Departure Warning Test, Invalid Run Due to Subject Vehicle Yaw Rate... D-9 Figure D4. Time History for Run 1, Solid Line, Left Departure, Haptic Warning... D-10 Figure D5. Time History for Run 2, Solid Line, Left Departure, Haptic Warning... D-11 Figure D6. Time History for Run 3, Solid Line, Left Departure, Haptic Warning... D-12 Figure D7. Time History for Run 4, Solid Line, Left Departure, Haptic Warning... D-13 Figure D8. Time History for Run 5, Solid Line, Left Departure, Haptic Warning... D-14 Figure D9. Time History for Run 6, Solid Line, Left Departure, Haptic Warning... D-15 Figure D10. Time History for Run 7, Solid Line, Left Departure, Haptic Warning... D-16 Figure D11. Time History for Run 8, Solid Line, Right Departure, Haptic Warning... D-17 Figure D12. Time History for Run 9, Solid Line, Right Departure, Haptic Warning... D-18 Figure D13. Time History for Run 10, Solid Line, Right Departure, Haptic Warning... D-19 Figure D14. Time History for Run 11, Solid Line, Right Departure, Haptic Warning... D-20 Figure D15. Time History for Run 12, Solid Line, Right Departure, Haptic Warning... D-21 Figure D16. Time History for Run 13, Solid Line, Right Departure, Haptic Warning... D-22 Figure D17. Time History for Run 14, Solid Line, Right Departure, Haptic Warning... D-23 Figure D18. Time History for Run 15, Dashed Line, Right Departure, Haptic Warning... D-24 Figure D19. Time History for Run 16, Dashed Line, Right Departure, Haptic Warning... D-25 Figure D20. Time History for Run 17, Dashed Line, Right Departure, Haptic Warning... D-26 Figure D21. Time History for Run 18, Dashed Line, Right Departure, Haptic Warning... D-27 Figure D22. Time History for Run 19, Dashed Line, Right Departure, Haptic Warning... D-28 Figure D23. Time History for Run 20, Dashed Line, Right Departure, Haptic Warning... D-29 Figure D24. Time History for Run 21, Dashed Line, Right Departure, Haptic Warning... D-30 Figure D25. Time History for Run 22, Dashed Line, Left Departure, Haptic Warning... D-31 D-2
50 Figure D26. Time History for Run 23, Dashed Line, Left Departure, Haptic Warning... D-32 Figure D27. Time History for Run 25, Dashed Line, Left Departure, Haptic Warning... D-33 Figure D28. Time History for Run 26, Dashed Line, Left Departure, Haptic Warning... D-34 Figure D29. Time History for Run 27, Dashed Line, Left Departure, Haptic Warning... D-35 Figure D30. Time History for Run 28, Dashed Line, Left Departure, Haptic Warning... D-36 Figure D31. Time History for Run 29, Dashed Line, Left Departure, Haptic Warning... D-37 Figure D32. Time History for Run 30, Botts Dots, Left Departure, Haptic Warning... D-38 Figure D33. Time History for Run 31, Botts Dots, Left Departure, Haptic Warning... D-39 Figure D34. Time History for Run 33, Botts Dots, Left Departure, Haptic Warning... D-40 Figure D35. Time History for Run 35, Botts Dots, Left Departure, Haptic Warning... D-41 Figure D36. Time History for Run 36, Botts Dots, Left Departure, Haptic Warning... D-42 Figure D37. Time History for Run 37, Botts Dots, Left Departure, Haptic Warning... D-43 Figure D38. Time History for Run 38, Botts Dots, Left Departure, Haptic Warning... D-44 Figure D39. Time History for Run 39, Botts Dots, Right Departure, Haptic Warning... D-45 Figure D40. Time History for Run 40, Botts Dots, Right Departure, Haptic Warning... D-46 Figure D41. Time History for Run 42, Botts Dots, Right Departure, Haptic Warning... D-47 Figure D42. Time History for Run 43, Botts Dots, Right Departure, Haptic Warning... D-48 Figure D43. Time History for Run 44, Botts Dots, Right Departure, Haptic Warning... D-49 Figure D44. Time History for Run 45, Botts Dots, Right Departure, Haptic Warning... D-50 Figure D45. Time History for Run 46, Botts Dots, Right Departure, Haptic Warning... D-51 D-3
51 D. Description of Time History Plots A set of time history plots is provided for each valid run in the test series. Each set of plots comprises time varying data from the Subject Vehicle, as well as pass/fail envelopes and thresholds. The following is a description of data types shown in the time history plots, as well as a description of the color code for data envelopes. Time HistoryPlot Description Time history figures include the following sub-plots: Event indicates timing of warning issued by LDW system. Depending on the type of LDW alert or instrumentation used to measure the alert, this can be any of the following,: o Filtered and rectified sound signal o Filtered and rectified acceleration (e.g., steering wheel vibration) o Light sensor signal o Discrete on/off value Speed (mph) speed of the Subject Vehicle Yaw Rate (deg/sec) yaw rate of the Subject Vehicle Dist to Lane Edge (ft) lateral distance (in lane coordinates) from the outer front tire bulge to the inside edge of the lane marking of interest for a given test (a positive value indicates the vehicle is completely within the lane while a negative value indicates that the outer front tire bulge has crossed over the inner lane marking edge) Lateral Velocity (ft/sec) lateral velocity (in lane coordinates) of the outer front tire bulge Bird s Eye View Indicates the position of the Subject Vehicle with respect to the lane marking of interest for a given test. Green rectangles represent the Subject Vehicle s position at approximately 2 second intervals, while the yellow rectangle indicates the position of the Subject Vehicle at the time of LDW warning issuance. D-4
52 Envelopes and Thresholds Each of the time history plot figures can contain either green or yellow envelopes and/or black threshold lines. These envelopes and thresholds are used to programmatically and visually determine the validity of a given test run. Envelope and threshold exceedances are indicated with either red shading or red asterisks, and red text is placed to the right side of the plot indicating the type of exceedance. Green envelopes indicate that the time-varying data should not exceed the envelope boundaries at any time within the envelope. Exceedances of a green envelope are indicated by red shading in the area between the measured time-varying data and the envelope boundaries. Yellow envelopes indicate that the time-varying data should not exceed the envelope only at the right end. Exceedances at the right extent of a yellow envelope are indicated by red asterisks.data within the boundaries at the right extent of a yellow envelope are indicated by green circles. Color Codes Color codes have been adopted to easily identify the types of data, envelopes and thresholds used in the plots. Color codes can be broken into three categories: 1. Validation envelopes and thresholds 2. Instantaneous samplings 3. Text 1. Validation envelope and threshold color codes: Green envelope = time varying data must be within the envelope at all times in order to be valid Yellow envelope = time varying data must be within limits at right end Black threshold (Solid) = time varying data must not exceed this threshold in order to be valid Black threshold (Dashed) = for reference only this can include warning level thresholds which are used to determine the timing of the alert 2. Instantaneous sampling color codes: Green circle = passing or valid value at a given moment in time Red asterisk = failing or invalid value at a given moment in time D-5
53 3. Text color codes: Green = passing or valid value Red = failing or invalid value Examples of time history plots (including passing, failing and invalid runs) are shown in Figure D1 through Figure D3. Actual time history data plots for the vehicle under consideration are provided subsequently. D-6
54 Figure D1. Example Time History for Lane Departure Warning Test, Passing D-7

55 Figure D2. Example Time History for Lane Departure Warning Test, Failing, No Warning Issued D-8
56 Figure D3. Example Time History for Lane Departure Warning Test, Invalid Run Due to Subject Vehicle Yaw Rate D-9
57 Figure D4. Time History for Run 1, Solid Line, Left Departure, Haptic Warning D-10
58 Figure D5. Time History for Run 2, Solid Line, Left Departure, Haptic Warning D-11
59 Figure D6. Time History for Run 3, Solid Line, Left Departure, Haptic Warning D-12
60 Figure D7. Time History for Run 4, Solid Line, Left Departure, Haptic Warning D-13
61 Figure D8. Time History for Run 5, Solid Line, Left Departure, Haptic Warning D-14
62 Figure D9. Time History for Run 6, Solid Line, Left Departure, Haptic Warning D-15
63 Figure D10. Time History for Run 7, Solid Line, Left Departure, Haptic Warning D-16
64 Figure D11. Time History for Run 8, Solid Line, Right Departure, Haptic Warning D-17
65 Figure D12. Time History for Run 9, Solid Line, Right Departure, Haptic Warning D-18
66 Figure D13. Time History for Run 10, Solid Line, Right Departure, Haptic Warning D-19
67 Figure D14. Time History for Run 11, Solid Line, Right Departure, Haptic Warning D-20
68 Figure D15. Time History for Run 12, Solid Line, Right Departure, Haptic Warning D-21
69 Figure D16. Time History for Run 13, Solid Line, Right Departure, Haptic Warning D-22
70 Figure D17. Time History for Run 14, Solid Line, Right Departure, Haptic Warning D-23
71 Figure D18. Time History for Run 15, Dashed Line, Right Departure, Haptic Warning D-24
72 Figure D19. Time History for Run 16, Dashed Line, Right Departure, Haptic Warning D-25
73 Figure D20. Time History for Run 17, Dashed Line, Right Departure, Haptic Warning D-26
74 Figure D21. Time History for Run 18, Dashed Line, Right Departure, Haptic Warning D-27
75 Figure D22. Time History for Run 19, Dashed Line, Right Departure, Haptic Warning D-28
76 Figure D23. Time History for Run 20, Dashed Line, Right Departure, Haptic Warning D-29
77 Figure D24. Time History for Run 21, Dashed Line, Right Departure, Haptic Warning D-30
78 Figure D25. Time History for Run 22, Dashed Line, Left Departure, Haptic Warning D-31
79 Figure D26. Time History for Run 23, Dashed Line, Left Departure, Haptic Warning D-32
80 Figure D27. Time History for Run 25, Dashed Line, Left Departure, Haptic Warning D-33
81 Figure D28. Time History for Run 26, Dashed Line, Left Departure, Haptic Warning D-34
82 Figure D29. Time History for Run 27, Dashed Line, Left Departure, Haptic Warning D-35
83 Figure D30. Time History for Run 28, Dashed Line, Left Departure, Haptic Warning D-36
84 Figure D31. Time History for Run 29, Dashed Line, Left Departure, Haptic Warning D-37
85 Figure D32. Time History for Run 30, Botts Dots, Left Departure, Haptic Warning D-38
86 Figure D33. Time History for Run 31, Botts Dots, Left Departure, Haptic Warning D-39
87 Figure D34. Time History for Run 33, Botts Dots, Left Departure, Haptic Warning D-40
88 Figure D35. Time History for Run 35, Botts Dots, Left Departure, Haptic Warning D-41
89 Figure D36. Time History for Run 36, Botts Dots, Left Departure, Haptic Warning D-42
90 Figure D37. Time History for Run 37, Botts Dots, Left Departure, Haptic Warning D-43
91 Figure D38. Time History for Run 38, Botts Dots, Left Departure, Haptic Warning D-44
92 Figure D39. Time History for Run 39, Botts Dots, Right Departure, Haptic Warning D-45
93 Figure D40. Time History for Run 40, Botts Dots, Right Departure, Haptic Warning D-46
94 Figure D41. Time History for Run 42, Botts Dots, Right Departure, Haptic Warning D-47
95 Figure D42. Time History for Run 43, Botts Dots, Right Departure, Haptic Warning D-48
96 Figure D43. Time History for Run 44, Botts Dots, Right Departure, Haptic Warning D-49

97 Figure D44. Time History for Run 45, Botts Dots, Right Departure, Haptic Warning D-50
98 Figure D45. Time History for Run 46, Botts Dots, Right Departure, Haptic Warning D-51
Preliminary Study of the Response of Forward Collision Warning Systems to Motorcycles
 Preliminary Study of the Response of Forward Collision Warning Systems to Motorcycles Vorläufige Studie über Kollisionswarnsysteme mit Blick auf Motorräder John F. Lenkeit, Terrance Smith PhD Dynamic Research,
Preliminary Study of the Response of Forward Collision Warning Systems to Motorcycles Vorläufige Studie über Kollisionswarnsysteme mit Blick auf Motorräder John F. Lenkeit, Terrance Smith PhD Dynamic Research,
REPORT NUMBER: 111SB-MGA SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111SB SCHOOL BUS REARVIEW MIRRORS
 REPORT NUMBER: 111SB-MGA-2009-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111SB SCHOOL BUS REARVIEW MIRRORS THOMAS BUILT BUSES 2009 THOMAS MINOTOUR SCHOOL BUS NHTSA NO.: C90901 PREPARED BY: MGA RESEARCH
REPORT NUMBER: 111SB-MGA-2009-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111SB SCHOOL BUS REARVIEW MIRRORS THOMAS BUILT BUSES 2009 THOMAS MINOTOUR SCHOOL BUS NHTSA NO.: C90901 PREPARED BY: MGA RESEARCH
REPORT NUMBER: 111-MGA SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111 SCHOOL BUS REARVIEW MIRRORS
 REPORT NUMBER: 111-MGA-05-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111 SCHOOL BUS REARVIEW MIRRORS Girardin Minibus Inc. 2005 Minibus NHTSA No. C50902 PREPARED BY: MGA RESEARCH CORPORATION 5000 WARREN
REPORT NUMBER: 111-MGA-05-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111 SCHOOL BUS REARVIEW MIRRORS Girardin Minibus Inc. 2005 Minibus NHTSA No. C50902 PREPARED BY: MGA RESEARCH CORPORATION 5000 WARREN
REPORT NUMBER: 111-MGA SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111 SCHOOL BUS REARVIEW MIRRORS
 REPORT NUMBER: 111-MGA-05-003 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111 SCHOOL BUS REARVIEW MIRRORS Les Entreprises Michel Corbeil Inc. 2004 Corbeil 30 Passenger School Bus NHTSA No. C40902 PREPARED
REPORT NUMBER: 111-MGA-05-003 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111 SCHOOL BUS REARVIEW MIRRORS Les Entreprises Michel Corbeil Inc. 2004 Corbeil 30 Passenger School Bus NHTSA No. C40902 PREPARED
SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS
 REPORT NUMBER 124-GTL-07-001 SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS HYUNDAI MOTOR COMPANY 2007 HYUNDAI ELANTRA 4-DOOR PASSENGER CAR NHTSA NO. C70502 GENERAL TESTING LABORATORIES,
REPORT NUMBER 124-GTL-07-001 SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS HYUNDAI MOTOR COMPANY 2007 HYUNDAI ELANTRA 4-DOOR PASSENGER CAR NHTSA NO. C70502 GENERAL TESTING LABORATORIES,
Pedestrian Autonomous Emergency Braking Test Protocol (Version II) February 2019
 February 2019") Pedestrian Autonomous Emergency Braking Test Protocol (Version II) February 2019 Contents DOCUMENT REVISION HISTORY... ii SUMMARY... 1 TEST ENVIRONMENT... 2 Surface and Markings... 2 Surroundings... 2
Pedestrian Autonomous Emergency Braking Test Protocol (Version II) February 2019 Contents DOCUMENT REVISION HISTORY... ii SUMMARY... 1 TEST ENVIRONMENT... 2 Surface and Markings... 2 Surroundings... 2
Pedestrian Autonomous Emergency Braking Test Protocol (Version 1) December 2018
 December 2018") Pedestrian Autonomous Emergency Braking Test Protocol (Version 1) December 2018 Contents DOCUMENT REVISION HISTORY... ii SUMMARY... 1 TEST ENVIRONMENT... 1 Surface and Markings... 1 Surroundings... 2 Ambient
Pedestrian Autonomous Emergency Braking Test Protocol (Version 1) December 2018 Contents DOCUMENT REVISION HISTORY... ii SUMMARY... 1 TEST ENVIRONMENT... 1 Surface and Markings... 1 Surroundings... 2 Ambient
REPORT NUMBER: 111SB-MGA SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111SB SCHOOL BUS REARVIEW MIRRORS
 REPORT NUMBER: 111SB-MGA-2011-005 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111SB SCHOOL BUS REARVIEW MIRRORS 2012 IC CORP. CE SCHOOL BUS NHTSA NO.: CC0900 PREPARED BY: MGA RESEARCH CORPORATION 5000 WARREN
REPORT NUMBER: 111SB-MGA-2011-005 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111SB SCHOOL BUS REARVIEW MIRRORS 2012 IC CORP. CE SCHOOL BUS NHTSA NO.: CC0900 PREPARED BY: MGA RESEARCH CORPORATION 5000 WARREN
SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS
 REPORT NUMBER 124-GTL-10-004 SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS FORD MOTOR CO. 2010 LINCOLN MKS, PASSENGER CAR NHTSA NO. CA0209 GENERAL TESTING LABORATORIES, INC. 1623
REPORT NUMBER 124-GTL-10-004 SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS FORD MOTOR CO. 2010 LINCOLN MKS, PASSENGER CAR NHTSA NO. CA0209 GENERAL TESTING LABORATORIES, INC. 1623
SAFETY COMPLIANCE TESTING FOR FMVSS 225 Child Restraint Anchorage Systems
 FINAL REPORT NUMBER 225-MGA-10-003 SAFETY COMPLIANCE TESTING FOR FMVSS 225 NISSAN MOTORS 2010 NISSAN ROGUE NHTSA No. CA5202 MGA RESEARCH CORPORATION 446 Executive Drive Troy, Michigan 48083 Test Date:
FINAL REPORT NUMBER 225-MGA-10-003 SAFETY COMPLIANCE TESTING FOR FMVSS 225 NISSAN MOTORS 2010 NISSAN ROGUE NHTSA No. CA5202 MGA RESEARCH CORPORATION 446 Executive Drive Troy, Michigan 48083 Test Date:
SAFETY COMPLIANCE TESTING FOR FMVSS 202a Head Restraints
 FINAL REPORT NUMBER 202a-MGA-10-003 SAFETY COMPLIANCE TESTING FOR FMVSS 202a FORD MOTOR COMPANY 2010 Lincoln MKT MPV NHTSA No. CA0213 MGA RESEARCH CORPORATION 446 Executive Drive Troy, Michigan 48083 Test
FINAL REPORT NUMBER 202a-MGA-10-003 SAFETY COMPLIANCE TESTING FOR FMVSS 202a FORD MOTOR COMPANY 2010 Lincoln MKT MPV NHTSA No. CA0213 MGA RESEARCH CORPORATION 446 Executive Drive Troy, Michigan 48083 Test
SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS
 REPORT NUMBER 124-GTL-07-003 SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS NISSAN MOTOR CO., LTD. 2007 NISSAN VERSA, 4-DOOR PASSENGER CAR NHTSA NO. C75201 GENERAL TESTING LABORATORIES,
REPORT NUMBER 124-GTL-07-003 SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS NISSAN MOTOR CO., LTD. 2007 NISSAN VERSA, 4-DOOR PASSENGER CAR NHTSA NO. C75201 GENERAL TESTING LABORATORIES,
REPORT NO. TR-P NC SAFETY COMPLIANCE TESTING FOR FMVSS 223 REAR IMPACT GUARDS 2007 TRANSFREIGHT TECHNOLOGY NHTSA NO.
 REPORT NO. SAFETY COMPLIANCE TESTING FOR FMVSS 223 REAR IMPACT GUARDS 2007 TRANSFREIGHT TECHNOLOGY NHTSA NO. RIG 009 PREPARED BY: KARCO ENGINEERING, LLC. 9270 HOLLY ROAD ADELANTO, CALIFORNIA 92301 SEPTEMBER
REPORT NO. SAFETY COMPLIANCE TESTING FOR FMVSS 223 REAR IMPACT GUARDS 2007 TRANSFREIGHT TECHNOLOGY NHTSA NO. RIG 009 PREPARED BY: KARCO ENGINEERING, LLC. 9270 HOLLY ROAD ADELANTO, CALIFORNIA 92301 SEPTEMBER
SAFETY COMPLIANCE TESTING FOR FMVSS 225 Child Restraint Anchorage Systems
 FINAL REPORT NUMBER 225-MGA-06-002 SAFETY COMPLIANCE TESTING FOR FMVSS 225 GENERAL MOTORS CORPORATION 2006 HUMMER H3 NHTSA No. C60102 MGA RESEARCH CORPORATION 446 Executive Drive Troy, Michigan 48083 Test
FINAL REPORT NUMBER 225-MGA-06-002 SAFETY COMPLIANCE TESTING FOR FMVSS 225 GENERAL MOTORS CORPORATION 2006 HUMMER H3 NHTSA No. C60102 MGA RESEARCH CORPORATION 446 Executive Drive Troy, Michigan 48083 Test
REPORT NUMBER: 111SB-MGA SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111SB SCHOOL BUS REARVIEW MIRRORS
 REPORT NUMBER: 111SB-MGA-2011-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111SB SCHOOL BUS REARVIEW MIRRORS 2011 STARCRAFT QUEST SCHOOL BUS NHTSA NO.: CB0902 PREPARED BY: MGA RESEARCH CORPORATION 5000
REPORT NUMBER: 111SB-MGA-2011-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111SB SCHOOL BUS REARVIEW MIRRORS 2011 STARCRAFT QUEST SCHOOL BUS NHTSA NO.: CB0902 PREPARED BY: MGA RESEARCH CORPORATION 5000
COMPLIANCE TESTING FOR FMVSS 207 SEATING SYSTEMS
 REPORT NO. COMPLIANCE TESTING FOR FMVSS 207 SEATING SYSTEMS 2008 CHEVROLET IMPALA 4-DOOR NHTSA NO.C80102 PREPARED BY: KARCO ENGINEERING, LLC 9270 HOLLY ROAD ADELANTO, CALIFORNIA 92301 September 24, 2008
REPORT NO. COMPLIANCE TESTING FOR FMVSS 207 SEATING SYSTEMS 2008 CHEVROLET IMPALA 4-DOOR NHTSA NO.C80102 PREPARED BY: KARCO ENGINEERING, LLC 9270 HOLLY ROAD ADELANTO, CALIFORNIA 92301 September 24, 2008
REPORT NUMBER: 131-MGA SAFETY COMPLIANCE TESTING FOR FMVSS NO. 131 SCHOOL BUS PEDESTRIAN SAFETY DEVICES
 REPORT NUMBER: 131-MGA-05-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 131 SCHOOL BUS PEDESTRIAN SAFETY DEVICES Les Entreprises Michel Corbeil Inc. 2004 Corbeil 30 Passenger School Bus NHTSA No. C40902
REPORT NUMBER: 131-MGA-05-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 131 SCHOOL BUS PEDESTRIAN SAFETY DEVICES Les Entreprises Michel Corbeil Inc. 2004 Corbeil 30 Passenger School Bus NHTSA No. C40902
REPORT NUMBER: 114-CAL SAFETY COMPLIANCE TESTING FOR FMVSS No. 114 THEFT PROTECTION AND ROLLOWAY PREVENTION
 REPORT NUMBER: 114-CAL-08-07 SAFETY COMPLIANCE TESTING FOR FMVSS No. 114 THEFT PROTECTION AND ROLLOWAY PREVENTION GENERAL MOTORS CORPORATION 2008 CHEVROLET MALIBU HYBRID FOUR-DOOR SEDAN NHTSA NUMBER: C80110
REPORT NUMBER: 114-CAL-08-07 SAFETY COMPLIANCE TESTING FOR FMVSS No. 114 THEFT PROTECTION AND ROLLOWAY PREVENTION GENERAL MOTORS CORPORATION 2008 CHEVROLET MALIBU HYBRID FOUR-DOOR SEDAN NHTSA NUMBER: C80110
REPORT NUMBER: 114-CAL SAFETY COMPLIANCE TESTING FOR FMVSS No. 114 THEFT PROTECTION AND ROLLOWAY PREVENTION
 REPORT NUMBER: 114-CAL-08-02 SAFETY COMPLIANCE TESTING FOR FMVSS No. 114 THEFT PROTECTION AND ROLLOWAY PREVENTION MAZDA MOTOR CORPORATION 2008 MAZDA CX-9 MPV NHTSA NUMBER: C85401 CALSPAN TEST NUMBER: 8858-F114-02
REPORT NUMBER: 114-CAL-08-02 SAFETY COMPLIANCE TESTING FOR FMVSS No. 114 THEFT PROTECTION AND ROLLOWAY PREVENTION MAZDA MOTOR CORPORATION 2008 MAZDA CX-9 MPV NHTSA NUMBER: C85401 CALSPAN TEST NUMBER: 8858-F114-02
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 214S SIDE IMPACT PROTECTION (STATIC)
") REPORT NUMBER 214-GTL-09-002 SAFETY COMPLIANCE TESTING FOR S SIDE IMPACT PROTECTION (STATIC) MAZDA MOTOR CORPORATION 2009 MAZDA 3, PASSENGER CAR NHTSA NO. C95400 GENERAL TESTING LABORATORIES, INC. 1623
REPORT NUMBER 214-GTL-09-002 SAFETY COMPLIANCE TESTING FOR S SIDE IMPACT PROTECTION (STATIC) MAZDA MOTOR CORPORATION 2009 MAZDA 3, PASSENGER CAR NHTSA NO. C95400 GENERAL TESTING LABORATORIES, INC. 1623
SAFETY COMPLIANCE TESTING FOR FMVSS 110 TIRE SELECTION AND RIMS
 REPORT NUMBER 110-STF-10-004 SAFETY COMPLIANCE TESTING FOR FMVSS 110 TIRE SELECTION AND RIMS MAZDA MOTOR CORPORATION 2010 MAZDA 6 FOUR-DOOR PASSENGER CAR NHTSA NO. CA5402 U.S. DOT SAN ANGELO TEST FACILITY
REPORT NUMBER 110-STF-10-004 SAFETY COMPLIANCE TESTING FOR FMVSS 110 TIRE SELECTION AND RIMS MAZDA MOTOR CORPORATION 2010 MAZDA 6 FOUR-DOOR PASSENGER CAR NHTSA NO. CA5402 U.S. DOT SAN ANGELO TEST FACILITY
REPORT NUMBER: 114-CAL SAFETY COMPLIANCE TESTING FOR FMVSS No. 114 THEFT PROTECTION AND ROLLOWAY PREVENTION
 REPORT NUMBER: 114-CAL-08-06 SAFETY COMPLIANCE TESTING FOR FMVSS No. 114 THEFT PROTECTION AND ROLLOWAY PREVENTION FORD MOTOR COMPANY 2008 FORD RANGER REGULAR CAB PICKUP NHTSA NUMBER: C80205 CALSPAN TEST
REPORT NUMBER: 114-CAL-08-06 SAFETY COMPLIANCE TESTING FOR FMVSS No. 114 THEFT PROTECTION AND ROLLOWAY PREVENTION FORD MOTOR COMPANY 2008 FORD RANGER REGULAR CAB PICKUP NHTSA NUMBER: C80205 CALSPAN TEST
REPORT NUMBER: 114-CAL SAFETY COMPLIANCE TESTING FOR FMVSS No. 114 THEFT PROTECTION AND ROLLOWAY PREVENTION
 REPORT NUMBER: 114-CAL-08-08 SAFETY COMPLIANCE TESTING FOR FMVSS No. 114 THEFT PROTECTION AND ROLLOWAY PREVENTION SUZUKI MOTOR CORPORATION 2008 SUZUKI SX4 4-DOOR SEDAN NHTSA NUMBER: C80512 CALSPAN TEST
REPORT NUMBER: 114-CAL-08-08 SAFETY COMPLIANCE TESTING FOR FMVSS No. 114 THEFT PROTECTION AND ROLLOWAY PREVENTION SUZUKI MOTOR CORPORATION 2008 SUZUKI SX4 4-DOOR SEDAN NHTSA NUMBER: C80512 CALSPAN TEST
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 114 THEFT PROTECTION
 REPORT NUMBER 114-GTL-10-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 114 THEFT PROTECTION CHRYSLER GROUP LLC 2010 DODGE CHARGER SE, PASSENGER CAR NHTSA NO. CA0302 GENERAL TESTING LABORATORIES, INC. 1623
REPORT NUMBER 114-GTL-10-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 114 THEFT PROTECTION CHRYSLER GROUP LLC 2010 DODGE CHARGER SE, PASSENGER CAR NHTSA NO. CA0302 GENERAL TESTING LABORATORIES, INC. 1623
GENERAL TESTING LABORATORIES, INC LEEDSTOWN ROAD COLONIAL BEACH, VIRGINIA 22443
 REPORT NUMBER 202a-GTL-10-004 SAFETY COMPLIANCE TESTING FOR S HEAD RESTRAINTS STATIC REQUIREMENTS VOLVO CAR CORPORATION 2010 VOLVO S40, PASSENGER CAR NHTSA NO. CA5900 GENERAL TESTING LABORATORIES, INC.
REPORT NUMBER 202a-GTL-10-004 SAFETY COMPLIANCE TESTING FOR S HEAD RESTRAINTS STATIC REQUIREMENTS VOLVO CAR CORPORATION 2010 VOLVO S40, PASSENGER CAR NHTSA NO. CA5900 GENERAL TESTING LABORATORIES, INC.
SAFETY COMPLIANCE TESTING FOR FMVSS 110 TIRE SELECTION AND RIMS
 REPORT NUMBER 110-STF-09-001 SAFETY COMPLIANCE TESTING FOR TIRE SELECTION AND RIMS GENERAL MOTORS CORPORATION 2009 CHEVROLET IMPALA FOUR-DOOR PASSENGER CAR NHTSA NO. C90100 U.S. DOT SAN ANGELO TEST FACILITY
REPORT NUMBER 110-STF-09-001 SAFETY COMPLIANCE TESTING FOR TIRE SELECTION AND RIMS GENERAL MOTORS CORPORATION 2009 CHEVROLET IMPALA FOUR-DOOR PASSENGER CAR NHTSA NO. C90100 U.S. DOT SAN ANGELO TEST FACILITY
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 114 THEFT PROTECTION
 REPORT NUMBER 114-GTL-10-007 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 114 THEFT PROTECTION TOYOTA MOTOR CORPORATION 2010 SCION tc PASSENGER CAR NHTSA NO. CA5106 GENERAL TESTING LABORATORIES, INC. 1623 LEEDSTOWN
REPORT NUMBER 114-GTL-10-007 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 114 THEFT PROTECTION TOYOTA MOTOR CORPORATION 2010 SCION tc PASSENGER CAR NHTSA NO. CA5106 GENERAL TESTING LABORATORIES, INC. 1623 LEEDSTOWN
SAFETY COMPLIANCE TESTING FOR FMVSS 225 Child Restraint Anchorage Systems
 FINAL REPORT NUMBER 225-MGA-06-007 SAFETY COMPLIANCE TESTING FOR FMVSS 225 TOYOTA MOTOR CORPORATION 2006 TOYOTA HIGHLANDER NHTSA No. C65101 MGA RESEARCH CORPORATION 446 Executive Drive Troy, Michigan 48083
FINAL REPORT NUMBER 225-MGA-06-007 SAFETY COMPLIANCE TESTING FOR FMVSS 225 TOYOTA MOTOR CORPORATION 2006 TOYOTA HIGHLANDER NHTSA No. C65101 MGA RESEARCH CORPORATION 446 Executive Drive Troy, Michigan 48083
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 103 WINDSHIELD DEFROSTING AND DEFOGGING SYSTEMS
 REPORT NUMBER 103-GTL-07-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 103 WINDSHIELD DEFROSTING AND DEFOGGING SYSTEMS HYUNDAI MOTOR COMPANY 2007 HYUNDAI ELANTRA, PASSENGER CAR NHTSA NO. C70502 GENERAL TESTING
REPORT NUMBER 103-GTL-07-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 103 WINDSHIELD DEFROSTING AND DEFOGGING SYSTEMS HYUNDAI MOTOR COMPANY 2007 HYUNDAI ELANTRA, PASSENGER CAR NHTSA NO. C70502 GENERAL TESTING
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 103 WINDSHIELD DEFROSTING AND DEFOGGING SYSTEMS
 REPORT NUMBER 103-GTL-11-002 SAFETY COMPLIANCE TESTING FOR WINDSHIELD DEFROSTING AND DEFOGGING SYSTEMS NISSAN MOTOR CO., LTD. 2011 NISSAN LEAF, PASSENGER CAR NHTSA NO. CB5200 GENERAL TESTING LABORATORIES,
REPORT NUMBER 103-GTL-11-002 SAFETY COMPLIANCE TESTING FOR WINDSHIELD DEFROSTING AND DEFOGGING SYSTEMS NISSAN MOTOR CO., LTD. 2011 NISSAN LEAF, PASSENGER CAR NHTSA NO. CB5200 GENERAL TESTING LABORATORIES,
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 103 WINDSHIELD DEFROSTING AND DEFOGGING SYSTEMS
 REPORT NUMBER 103-GTL-09-005 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 103 WINDSHIELD DEFROSTING AND DEFOGGING SYSTEMS TOYOTA MOTOR CORPORATION 2009 LEXUS ES 350, PASSENGER CAR NHTSA NO. C95104 GENERAL TESTING
REPORT NUMBER 103-GTL-09-005 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 103 WINDSHIELD DEFROSTING AND DEFOGGING SYSTEMS TOYOTA MOTOR CORPORATION 2009 LEXUS ES 350, PASSENGER CAR NHTSA NO. C95104 GENERAL TESTING
REPORT NUMBER: 131SB-MGA SAFETY COMPLIANCE TESTING FOR FMVSS NO. 131SB SCHOOL BUS PEDESTRIAN SAFETY DEVICES
 REPORT NUMBER: 131SB-MGA-2011-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 131SB SCHOOL BUS PEDESTRIAN SAFETY DEVICES 2011 GIRARDIN MICRO BIRD SCHOOL BUS NHTSA NO.: CB0903 PREPARED BY: MGA RESEARCH CORPORATION
REPORT NUMBER: 131SB-MGA-2011-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 131SB SCHOOL BUS PEDESTRIAN SAFETY DEVICES 2011 GIRARDIN MICRO BIRD SCHOOL BUS NHTSA NO.: CB0903 PREPARED BY: MGA RESEARCH CORPORATION
REPORT NUMBER: 301-CAL SAFETY COMPLIANCE TESTING FOR FMVSS 301 FUEL SYSTEM INTEGRITY HONDA MOTOR COMPANY 2007 HONDA ACCORD 4-DOOR SEDAN
 REPORT NUMBER: 301-CAL-07-05 SAFETY COMPLIANCE TESTING FOR FMVSS 301 FUEL SYSTEM INTEGRITY HONDA MOTOR COMPANY 2007 HONDA ACCORD 4-DOOR SEDAN NHTSA NUMBER: C75304 CALSPAN TEST NUMBER: 8832-F301-05 CALSPAN
REPORT NUMBER: 301-CAL-07-05 SAFETY COMPLIANCE TESTING FOR FMVSS 301 FUEL SYSTEM INTEGRITY HONDA MOTOR COMPANY 2007 HONDA ACCORD 4-DOOR SEDAN NHTSA NUMBER: C75304 CALSPAN TEST NUMBER: 8832-F301-05 CALSPAN
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 104 WINDSHIELD WIPING AND WASHING SYSTEMS
 REPORT NUMBER 104-GTL-07-003 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 104 WINDSHIELD WIPING AND WASHING SYSTEMS HONDA MOTOR CO. 2007 HONDA FIT, PASSENGER CAR NHTSA NO. C75300 GENERAL TESTING LABORATORIES,
REPORT NUMBER 104-GTL-07-003 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 104 WINDSHIELD WIPING AND WASHING SYSTEMS HONDA MOTOR CO. 2007 HONDA FIT, PASSENGER CAR NHTSA NO. C75300 GENERAL TESTING LABORATORIES,
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 104 WINDSHIELD WIPING AND WASHING SYSTEMS
 REPORT NUMBER 104-GTL-07-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 104 WINDSHIELD WIPING AND WASHING SYSTEMS NISSAN MOTOR CO., LTD. 2007 NISSAN VERSA, PASSENGER CAR NHTSA NO. C75201 GENERAL TESTING LABORATORIES,
REPORT NUMBER 104-GTL-07-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 104 WINDSHIELD WIPING AND WASHING SYSTEMS NISSAN MOTOR CO., LTD. 2007 NISSAN VERSA, PASSENGER CAR NHTSA NO. C75201 GENERAL TESTING LABORATORIES,
REPORT NUMBER TR-P NC SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS
 REPORT NUMBER TR-P299-3-NC SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS NISSAN MOTOR CORPORATION 29 NISSAN ROGUE 5-DOOR MPV NHTSA NUMBER: C95 PREPARED BY: KARCO ENGINEERING, LLC.
REPORT NUMBER TR-P299-3-NC SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS NISSAN MOTOR CORPORATION 29 NISSAN ROGUE 5-DOOR MPV NHTSA NUMBER: C95 PREPARED BY: KARCO ENGINEERING, LLC.
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS
 REPORT NUMBER 110-STF-11-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS FORD MOTOR COMPANY 2011 FORD FIESTA FOUR-DOOR PASSENGER CAR NHTSA NO. CB0200 U.S. DOT SAN ANGELO TEST FACILITY
REPORT NUMBER 110-STF-11-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS FORD MOTOR COMPANY 2011 FORD FIESTA FOUR-DOOR PASSENGER CAR NHTSA NO. CB0200 U.S. DOT SAN ANGELO TEST FACILITY
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 103 WINDSHIELD DEFROSTING AND DEFOGGING SYSTEMS
 REPORT NUMBER 103-GTL-06-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 103 WINDSHIELD DEFROSTING AND DEFOGGING SYSTEMS FORD MOTOR CO. 2006 FORD MUSTANG, PASSENGER CAR NHTSA NO. C60203 GENERAL TESTING LABORATORIES,
REPORT NUMBER 103-GTL-06-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 103 WINDSHIELD DEFROSTING AND DEFOGGING SYSTEMS FORD MOTOR CO. 2006 FORD MUSTANG, PASSENGER CAR NHTSA NO. C60203 GENERAL TESTING LABORATORIES,
REPORT NUMBER: 120-MGA
 REPORT NUMBER: 120-MGA-2011-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 120 TIRE SELECTION AND RIMS FOR MOTOR VEHICLES WITH A GVWR OF MORE THAN 4,536 kg FOREST RIVER, INC. / STARCRAFT DIVISION 2011 STARCRAFT
REPORT NUMBER: 120-MGA-2011-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 120 TIRE SELECTION AND RIMS FOR MOTOR VEHICLES WITH A GVWR OF MORE THAN 4,536 kg FOREST RIVER, INC. / STARCRAFT DIVISION 2011 STARCRAFT
REPORT NUMBER: NCAP305I-MGA NEW CAR ASSESSMENT PROGRAM (NCAP) FMVSS No. 305 Indicant Test
 FMVSS No. 305 Indicant Test") REPORT NUMBER: NCAP305I-MGA-2012-008 NEW CAR ASSESSMENT PROGRAM (NCAP) FMVSS No. 305 Indicant Test GENERAL MOTORS LLC 2013 Chevrolet Malibu ECO4-Dr Hybrid Sedan NHTSA NUMBER: MD0101 MGA RESEARCH CORPORATION
REPORT NUMBER: NCAP305I-MGA-2012-008 NEW CAR ASSESSMENT PROGRAM (NCAP) FMVSS No. 305 Indicant Test GENERAL MOTORS LLC 2013 Chevrolet Malibu ECO4-Dr Hybrid Sedan NHTSA NUMBER: MD0101 MGA RESEARCH CORPORATION
REPORT NUMBER: 305-MGA
 REPORT NUMBER: 305-MGA-2011-001 SAFETY COMPLIANCE TESTING FOR FMVSS 305 Electric Powered Vehicles: Electrolyte Spillage and Electrical Shock Protection HONDA MOTOR CO., LTD 2011 HONDA CR-Z 3-DR HATCHBACK
REPORT NUMBER: 305-MGA-2011-001 SAFETY COMPLIANCE TESTING FOR FMVSS 305 Electric Powered Vehicles: Electrolyte Spillage and Electrical Shock Protection HONDA MOTOR CO., LTD 2011 HONDA CR-Z 3-DR HATCHBACK
DYNAMIC RESEARCH, INC. 355 Van Ness Avenue, STE 200 Torrance, California 90501
 126-DRI-10-001 SAFETY COMPLIANCE TESTING FOR FMVSS 126 Electronic Stability Control Systems Nissan Motor Co., Ltd. 2010 Nissan Altima NHTSA No. CA5206 DYNAMIC RESEARCH, INC. 355 Van Ness Avenue, STE 200
126-DRI-10-001 SAFETY COMPLIANCE TESTING FOR FMVSS 126 Electronic Stability Control Systems Nissan Motor Co., Ltd. 2010 Nissan Altima NHTSA No. CA5206 DYNAMIC RESEARCH, INC. 355 Van Ness Avenue, STE 200
REPORT NUMBER: 301-CAL SAFETY COMPLIANCE TESTING FOR FMVSS 301 FUEL SYSTEM INTEGRITY REAR IMPACT MAZDA MOTOR CORPORATION 2008 MAZDA CX-9 SUV
 REPORT NUMBER: 301-CAL-08-03 SAFETY COMPLIANCE TESTING FOR FMVSS 301 FUEL SYSTEM INTEGRITY REAR IMPACT MAZDA MOTOR CORPORATION 2008 MAZDA CX-9 SUV NHTSA NUMBER: C85401 CALSPAN TRANSPORTATION SCIENCES CENTER
REPORT NUMBER: 301-CAL-08-03 SAFETY COMPLIANCE TESTING FOR FMVSS 301 FUEL SYSTEM INTEGRITY REAR IMPACT MAZDA MOTOR CORPORATION 2008 MAZDA CX-9 SUV NHTSA NUMBER: C85401 CALSPAN TRANSPORTATION SCIENCES CENTER
REPORT NUMBER: 301-CAL SAFETY COMPLIANCE TESTING FOR FMVSS 301 FUEL SYSTEM INTEGRITY REAR IMPACT FORD MOTOR COMPANY 2009 FORD F150 2-DOOR PICKUP
 REPORT NUMBER: 301-CAL-09-03 SAFETY COMPLIANCE TESTING FOR FMVSS 301 FUEL SYSTEM INTEGRITY REAR IMPACT FORD MOTOR COMPANY 2009 FORD F150 2-DOOR PICKUP NHTSA NUMBER: C90206 CALSPAN TRANSPORTATION SCIENCES
REPORT NUMBER: 301-CAL-09-03 SAFETY COMPLIANCE TESTING FOR FMVSS 301 FUEL SYSTEM INTEGRITY REAR IMPACT FORD MOTOR COMPANY 2009 FORD F150 2-DOOR PICKUP NHTSA NUMBER: C90206 CALSPAN TRANSPORTATION SCIENCES
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS
 REPORT NUMBER 110-STF-08-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS HONDA MOTOR COMPANY 2008 ACURA RDX FOUR-DOOR MPV NHTSA NO. C85300 U.S. DOT SAN ANGELO TEST FACILITY 131
REPORT NUMBER 110-STF-08-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS HONDA MOTOR COMPANY 2008 ACURA RDX FOUR-DOOR MPV NHTSA NO. C85300 U.S. DOT SAN ANGELO TEST FACILITY 131
REPORT NUMBER: 120-MGA
 REPORT NUMBER: 120-MGA-2011-004 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 120 TIRE SELECTION AND RIMS FOR MOTOR VEHICLES WITH A GVWR OF MORE THAN 4,536 kg STARTRANS 2010 MFSAB NHTSA NO.: CA0900 PREPARED
REPORT NUMBER: 120-MGA-2011-004 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 120 TIRE SELECTION AND RIMS FOR MOTOR VEHICLES WITH A GVWR OF MORE THAN 4,536 kg STARTRANS 2010 MFSAB NHTSA NO.: CA0900 PREPARED
REPORT NUMBER: 305-MGA
 REPORT NUMBER: 305-MGA-2011-004 SAFETY COMPLIANCE TESTING FOR FMVSS 305 Electric Powered Vehicles: Electrolyte Spillage and Electrical Shock Protection NISSAN MOTOR CO., LTD. 2011 NISSAN LEAF 5-DR HATCHBACK
REPORT NUMBER: 305-MGA-2011-004 SAFETY COMPLIANCE TESTING FOR FMVSS 305 Electric Powered Vehicles: Electrolyte Spillage and Electrical Shock Protection NISSAN MOTOR CO., LTD. 2011 NISSAN LEAF 5-DR HATCHBACK
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 401 INTERIOR TRUNK RELEASE
 REPORT NUMBER 401-STF-09-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 401 INTERIOR TRUNK RELEASE HYUNDAI MOTOR COMPANY 2009 HYUNDAI GENESIS FOUR-DOOR PASSENGER CAR NHTSA NO. C90501 U.S. DOT SAN ANGELO TEST
REPORT NUMBER 401-STF-09-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 401 INTERIOR TRUNK RELEASE HYUNDAI MOTOR COMPANY 2009 HYUNDAI GENESIS FOUR-DOOR PASSENGER CAR NHTSA NO. C90501 U.S. DOT SAN ANGELO TEST
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 202 HEAD RESTRAINTS STATIC REQUIREMENTS
 REPORT NUMBER 202-GTL-08-004 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 202 HEAD RESTRAINTS STATIC REQUIREMENTS HYUNDAI MOTOR MANUFACTURING ALABAMA, LLC 2008 HYUNDAI SONATA, PASSENGER CAR NHTSA NO. C80507
REPORT NUMBER 202-GTL-08-004 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 202 HEAD RESTRAINTS STATIC REQUIREMENTS HYUNDAI MOTOR MANUFACTURING ALABAMA, LLC 2008 HYUNDAI SONATA, PASSENGER CAR NHTSA NO. C80507
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 401 INTERIOR TRUNK RELEASE
 REPORT NUMBER 401-STF-09-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 401 INTERIOR TRUNK RELEASE GENERAL MOTORS CORPORATION 2009 CHEVROLET IMPALA FOUR-DOOR PASSENGER CAR NHTSA NO. C90100 U.S. DOT SAN ANGELO
REPORT NUMBER 401-STF-09-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 401 INTERIOR TRUNK RELEASE GENERAL MOTORS CORPORATION 2009 CHEVROLET IMPALA FOUR-DOOR PASSENGER CAR NHTSA NO. C90100 U.S. DOT SAN ANGELO
REPORT NUMBER: 301-CAL SAFETY COMPLIANCE TESTING FOR FMVSS 301 FUEL SYSTEM INTEGRITY REAR IMPACT
 REPORT NUMBER: 301-CAL-09-01 SAFETY COMPLIANCE TESTING FOR FMVSS 301 FUEL SYSTEM INTEGRITY REAR IMPACT HYUNDAI MOTOR COMPANY 2009 HYUNDAI ACCENT 4-DOOR SEDAN NHTSA NUMBER: C90503 CALSPAN TRANSPORTATION
REPORT NUMBER: 301-CAL-09-01 SAFETY COMPLIANCE TESTING FOR FMVSS 301 FUEL SYSTEM INTEGRITY REAR IMPACT HYUNDAI MOTOR COMPANY 2009 HYUNDAI ACCENT 4-DOOR SEDAN NHTSA NUMBER: C90503 CALSPAN TRANSPORTATION
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 202 HEAD RESTRAINTS STATIC REQUIREMENTS
 REPORT NUMBER 202-GTL-08-005 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 202 HEAD RESTRAINTS STATIC REQUIREMENTS KIA MOTORS CORPORATION 2008 KIA SPORTAGE, MPV NHTSA NO. C80506 GENERAL TESTING LABORATORIES,
REPORT NUMBER 202-GTL-08-005 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 202 HEAD RESTRAINTS STATIC REQUIREMENTS KIA MOTORS CORPORATION 2008 KIA SPORTAGE, MPV NHTSA NO. C80506 GENERAL TESTING LABORATORIES,
Remote Combination Adaptive Driving Equipment Investigation Dynamic Science, Inc. (DSI), Case Number G 1990 Ford Bronco Arizona October
, Case Number G 1990 Ford Bronco Arizona October") Remote Combination Adaptive Driving Equipment Investigation Dynamic Science, Inc. (DSI), Case Number 2007-76-131G 1990 Ford Bronco Arizona October 2007 This document is disseminated under the sponsorship
Remote Combination Adaptive Driving Equipment Investigation Dynamic Science, Inc. (DSI), Case Number 2007-76-131G 1990 Ford Bronco Arizona October 2007 This document is disseminated under the sponsorship
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS
 REPORT NUMBER 110-STF-10-007 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS CHRYSLER GROUP LLC 2010 DODGE RAM 1500 FOUR-DOOR TRUCK NHTSA NO. CA0303 U.S. DOT SAN ANGELO TEST FACILITY
REPORT NUMBER 110-STF-10-007 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS CHRYSLER GROUP LLC 2010 DODGE RAM 1500 FOUR-DOOR TRUCK NHTSA NO. CA0303 U.S. DOT SAN ANGELO TEST FACILITY
REPORT NUMBER: 301-MGA SAFETY COMPLIANCE TESTING FOR FMVSS NO. 301 FUEL SYSTEM INTEGRITY
 REPORT NUMBER: 301-MGA-2009-004 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 301 FUEL SYSTEM INTEGRITY GIRARDIN MINIBUS, INC. 2008 GIRARDIN G5 SCHOOL BUS NHTSA NO.: C80902 PREPARED BY: MGA RESEARCH CORPORATION
REPORT NUMBER: 301-MGA-2009-004 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 301 FUEL SYSTEM INTEGRITY GIRARDIN MINIBUS, INC. 2008 GIRARDIN G5 SCHOOL BUS NHTSA NO.: C80902 PREPARED BY: MGA RESEARCH CORPORATION
REPORT NUMBER: 301-MGA SAFETY COMPLIANCE TESTING FOR FMVSS 301R FUEL SYSTEM INTEGRITY REAR IMPACT
 REPORT NUMBER: 301-MGA-2010-005 SAFETY COMPLIANCE TESTING FOR FMVSS 301R FUEL SYSTEM INTEGRITY REAR IMPACT NISSAN MOTOR COMPANY LTD 2010 NISSAN CUBE NHTSA NUMBER: CA5201 PREPARED BY: MGA RESEARCH CORPORATION
REPORT NUMBER: 301-MGA-2010-005 SAFETY COMPLIANCE TESTING FOR FMVSS 301R FUEL SYSTEM INTEGRITY REAR IMPACT NISSAN MOTOR COMPANY LTD 2010 NISSAN CUBE NHTSA NUMBER: CA5201 PREPARED BY: MGA RESEARCH CORPORATION
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS
 REPORT NUMBER 110-STF-10-005 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS NISSAN MOTOR COMPANY 2010 NISSAN CUBE FOUR-DOOR MPV NHTSA NO. CA5203 U.S. DOT SAN ANGELO TEST FACILITY 131
REPORT NUMBER 110-STF-10-005 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS NISSAN MOTOR COMPANY 2010 NISSAN CUBE FOUR-DOOR MPV NHTSA NO. CA5203 U.S. DOT SAN ANGELO TEST FACILITY 131
REPORT NUMBER: 301-MGA SAFETY COMPLIANCE TESTING FOR FMVSS 301R FUEL SYSTEM INTEGRITY REAR IMPACT
 REPORT NUMBER: 301-MGA-2010-007 SAFETY COMPLIANCE TESTING FOR FMVSS 301R FUEL SYSTEM INTEGRITY REAR IMPACT NISSAN MOTOR COMPANY LTD 2010 NISSAN CUBE NHTSA NUMBER: CA5205 PREPARED BY: MGA RESEARCH CORPORATION
REPORT NUMBER: 301-MGA-2010-007 SAFETY COMPLIANCE TESTING FOR FMVSS 301R FUEL SYSTEM INTEGRITY REAR IMPACT NISSAN MOTOR COMPANY LTD 2010 NISSAN CUBE NHTSA NUMBER: CA5205 PREPARED BY: MGA RESEARCH CORPORATION
Headlight Test and Rating Protocol (Version I)
") Headlight Test and Rating Protocol (Version I) February 2016 HEADLIGHT TEST AND RATING PROTOCOL (VERSION I) This document describes the Insurance Institute for Highway Safety (IIHS) headlight test and
Headlight Test and Rating Protocol (Version I) February 2016 HEADLIGHT TEST AND RATING PROTOCOL (VERSION I) This document describes the Insurance Institute for Highway Safety (IIHS) headlight test and
CRASH TEST REPORT FOR PERIMETER BARRIERS AND GATES TESTED TO SD-STD-02.01, REVISION A, MARCH Anti-Ram Bollards
 CRASH TEST REPORT FOR PERIMETER BARRIERS AND GATES TESTED TO SD-STD-02.01, REVISION A, MARCH 2003 Anti-Ram Bollards Prepared for: RSA Protective Technologies, LLC 1573 Mimosa Court Upland, CA 91784 Test
CRASH TEST REPORT FOR PERIMETER BARRIERS AND GATES TESTED TO SD-STD-02.01, REVISION A, MARCH 2003 Anti-Ram Bollards Prepared for: RSA Protective Technologies, LLC 1573 Mimosa Court Upland, CA 91784 Test
REPORT NUMBER: 301-MGA SAFETY COMPLIANCE TESTING FOR FMVSS 301R FUEL SYSTEM INTEGRITY REAR IMPACT
 REPORT NUMBER: 301-MGA-2011-008 SAFETY COMPLIANCE TESTING FOR FMVSS 301R FUEL SYSTEM INTEGRITY REAR IMPACT MAZDA MOTOR CORPORATION 2011 MAZDA 2 SPORT MT NHTSA NUMBER: CB5400 PREPARED BY: MGA RESEARCH CORPORATION
REPORT NUMBER: 301-MGA-2011-008 SAFETY COMPLIANCE TESTING FOR FMVSS 301R FUEL SYSTEM INTEGRITY REAR IMPACT MAZDA MOTOR CORPORATION 2011 MAZDA 2 SPORT MT NHTSA NUMBER: CB5400 PREPARED BY: MGA RESEARCH CORPORATION
FMVSS NO. 202a HEAD RESTRAINTS INDICANT TEST
 REPORT NUMBER 202a-GTL-05-001 FMVSS NO. 202a HEAD RESTRAINTS INDICANT TEST TOYOTA MOTOR CORPORATION 2005 SCION tc, PASSENGER CAR NHTSA NO. C55100 GENERAL TESTING LABORATORIES, INC. 1623 LEEDSTOWN ROAD
REPORT NUMBER 202a-GTL-05-001 FMVSS NO. 202a HEAD RESTRAINTS INDICANT TEST TOYOTA MOTOR CORPORATION 2005 SCION tc, PASSENGER CAR NHTSA NO. C55100 GENERAL TESTING LABORATORIES, INC. 1623 LEEDSTOWN ROAD
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 225 CHILD RESTRAINT ANCHORAGE SYSTEMS LOWER AND TETHER ANCHORAGES
 REPORT NUMBER 225-GTL-06-006 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 225 CHILD RESTRAINT ANCHORAGE SYSTEMS LOWER AND TETHER ANCHORAGES GENERAL MOTORS OF CANADA, LTD. 2005 BUICK LACROSSE, PASSENGER CAR
REPORT NUMBER 225-GTL-06-006 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 225 CHILD RESTRAINT ANCHORAGE SYSTEMS LOWER AND TETHER ANCHORAGES GENERAL MOTORS OF CANADA, LTD. 2005 BUICK LACROSSE, PASSENGER CAR
CRASH TEST REPORT FOR PERIMETER BARRIERS AND GATES TESTED TO SD-STD-02.01, REVISION A, MARCH Anti-Ram Bollards
 CRASH TEST REPORT FOR PERIMETER BARRIERS AND GATES TESTED TO SD-STD-02.01, REVISION A, MARCH 2003 Anti-Ram Bollards Prepared for: RSA Protective Technologies, LLC 1573 Mimosa Court Upland, CA 91784 Test
CRASH TEST REPORT FOR PERIMETER BARRIERS AND GATES TESTED TO SD-STD-02.01, REVISION A, MARCH 2003 Anti-Ram Bollards Prepared for: RSA Protective Technologies, LLC 1573 Mimosa Court Upland, CA 91784 Test
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 138 TIRE PRESSURE MONITORING SYSTEMS
 REPORT NUMBER 138-STF-10-008 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 138 TIRE PRESSURE MONITORING SYSTEMS CHRYSLER GROUP, LLC 2010 DODGE RAM 1500 CREW CAB TRUCK NHTSA NO. CA0303 U.S. DOT SAN ANGELO TEST
REPORT NUMBER 138-STF-10-008 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 138 TIRE PRESSURE MONITORING SYSTEMS CHRYSLER GROUP, LLC 2010 DODGE RAM 1500 CREW CAB TRUCK NHTSA NO. CA0303 U.S. DOT SAN ANGELO TEST
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 138 TIRE PRESSURE MONITORING SYSTEMS
 REPORT NUMBER 138-STF-07-003 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 138 TIRE PRESSURE MONITORING SYSTEMS BAYERISCHE MOTOREN WERKE 2007 BMW X3 3.0si FOUR-DOOR MPV NHTSA NO. C70506 U.S. DOT SAN ANGELO TEST
REPORT NUMBER 138-STF-07-003 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 138 TIRE PRESSURE MONITORING SYSTEMS BAYERISCHE MOTOREN WERKE 2007 BMW X3 3.0si FOUR-DOOR MPV NHTSA NO. C70506 U.S. DOT SAN ANGELO TEST
REPORT NUMBER: 301-MGA SAFETY COMPLIANCE TESTING FOR FMVSS 301R FUEL SYSTEM INTEGRITY REAR IMPACT
 REPORT NUMBER: 301-MGA-2007-002 SAFETY COMPLIANCE TESTING FOR FMVSS 301R FUEL SYSTEM INTEGRITY REAR IMPACT NISSAN MOTOR CO., LTD. 2006 NISSAN PATHFINDER LE 4X2 NHTSA NUMBER: C65200 PREPARED BY: MGA RESEARCH
REPORT NUMBER: 301-MGA-2007-002 SAFETY COMPLIANCE TESTING FOR FMVSS 301R FUEL SYSTEM INTEGRITY REAR IMPACT NISSAN MOTOR CO., LTD. 2006 NISSAN PATHFINDER LE 4X2 NHTSA NUMBER: C65200 PREPARED BY: MGA RESEARCH
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 138 TIRE PRESSURE MONITORING SYSTEMS
 REPORT NUMBER 138-STF-07-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 138 TIRE PRESSURE MONITORING SYSTEMS KIA MOTORS CORPORATION 2007 HYUNDAI ENTOURAGE FOUR-DOOR MPV NHTSA NO. C70504 U.S. DOT SAN ANGELO
REPORT NUMBER 138-STF-07-001 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 138 TIRE PRESSURE MONITORING SYSTEMS KIA MOTORS CORPORATION 2007 HYUNDAI ENTOURAGE FOUR-DOOR MPV NHTSA NO. C70504 U.S. DOT SAN ANGELO
Procedure for assessing the performance of Autonomous Emergency Braking (AEB) systems in front-to-rear collisions
 systems in front-to-rear collisions") Procedure for assessing the performance of Autonomous Emergency Braking (AEB) systems in front-to-rear collisions Version 1.3 October 2014 CONTENTS 1 AIM... 3 2 SCOPE... 3 3 BACKGROUND AND RATIONALE...
Procedure for assessing the performance of Autonomous Emergency Braking (AEB) systems in front-to-rear collisions Version 1.3 October 2014 CONTENTS 1 AIM... 3 2 SCOPE... 3 3 BACKGROUND AND RATIONALE...
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS
 REPORT NUMBER 110-STF-07-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS KIA MOTORS CORPORATION 2007 HYUNDAI ENTOURAGE FOUR-DOOR MPV NHTSA NO. C70504 U.S. DOT SAN ANGELO TEST FACILITY
REPORT NUMBER 110-STF-07-002 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS KIA MOTORS CORPORATION 2007 HYUNDAI ENTOURAGE FOUR-DOOR MPV NHTSA NO. C70504 U.S. DOT SAN ANGELO TEST FACILITY
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS
 REPORT NUMBER 110-STF-07-004 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS BAYERISCHE MOTOREN WERKE AG 2007 BMW X3 3.0si FOUR-DOOR MPV NHTSA NO. C70506 U.S. DOT SAN ANGELO TEST FACILITY
REPORT NUMBER 110-STF-07-004 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS BAYERISCHE MOTOREN WERKE AG 2007 BMW X3 3.0si FOUR-DOOR MPV NHTSA NO. C70506 U.S. DOT SAN ANGELO TEST FACILITY
Remote, Redesigned Air Bag Special Study FOR NHTSA S INTERNAL USE ONLY Dynamic Science, Inc., Case Number ( J) 1998 Dodge Caravan Indiana
 1998 Dodge Caravan Indiana") Remote, Redesigned Air Bag Special Study FOR NHTSA S INTERNAL USE ONLY Dynamic Science, Inc., Case Number (1998-073-111J) 1998 Dodge Caravan Indiana September/1998 Technical Report Documentation Page 1.
Remote, Redesigned Air Bag Special Study FOR NHTSA S INTERNAL USE ONLY Dynamic Science, Inc., Case Number (1998-073-111J) 1998 Dodge Caravan Indiana September/1998 Technical Report Documentation Page 1.
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS
 REPORT NUMBER 110-GTL-08-005 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS TOYOTA MOTOR MANUFACTURING, TEXAS, INC. 2008 TOYOTA TUNDRA, TRUCK NHTSA NO. C85108 GENERAL TESTING LABORATORIES,
REPORT NUMBER 110-GTL-08-005 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 110 TIRE SELECTION AND RIMS TOYOTA MOTOR MANUFACTURING, TEXAS, INC. 2008 TOYOTA TUNDRA, TRUCK NHTSA NO. C85108 GENERAL TESTING LABORATORIES,
SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111 REARVIEW MIRRORS
 REPORT NUMBER 111-GTL-06-005 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111 REARVIEW MIRRORS HONDA OF CANADA MFG., DIVISION OF HONDA CANADA INC. 2006 HONDA RIDGELINE, TRUCK NHTSA NO. C65300 GENERAL TESTING
REPORT NUMBER 111-GTL-06-005 SAFETY COMPLIANCE TESTING FOR FMVSS NO. 111 REARVIEW MIRRORS HONDA OF CANADA MFG., DIVISION OF HONDA CANADA INC. 2006 HONDA RIDGELINE, TRUCK NHTSA NO. C65300 GENERAL TESTING
Euro NCAP Safety Assist
 1 SA -1 Content Euro NCAP Safety Assist Road Map 2020 2 SA -2 1 Content Euro NCAP Safety Assist 3 SA -3 Overall Rating 2015 4 SA -4 2 Safety Assist - Overview 2016+ 0 Points 2016+ 3 Points 5 SA -5 SBR
1 SA -1 Content Euro NCAP Safety Assist Road Map 2020 2 SA -2 1 Content Euro NCAP Safety Assist 3 SA -3 Overall Rating 2015 4 SA -4 2 Safety Assist - Overview 2016+ 0 Points 2016+ 3 Points 5 SA -5 SBR
SAFETY COMPLIANCE TESTING FOR FMVSS 201 Occupant Protection In Interior Impact Upper Interior Head Impact Protection
 FINAL REPORT NUMBER 201UI-MGA-10-01 SAFETY COMPLIANCE TESTING FOR FMVSS 201 Occupant Protection In Interior Impact Upper Interior Head Impact Protection CAMI AUTOMOTIVE, INC. 2010 Chevrolet Equinox MPV
FINAL REPORT NUMBER 201UI-MGA-10-01 SAFETY COMPLIANCE TESTING FOR FMVSS 201 Occupant Protection In Interior Impact Upper Interior Head Impact Protection CAMI AUTOMOTIVE, INC. 2010 Chevrolet Equinox MPV
Transmitted by the expert from the European Commission (EC) Informal Document No. GRRF (62nd GRRF, September 2007, agenda item 3(i))
 Informal Document No. GRRF (62nd GRRF, September 2007, agenda item 3(i))") Transmitted by the expert from the European Commission (EC) Informal Document No. GRRF-62-31 (62nd GRRF, 25-28 September 2007, agenda item 3(i)) Introduction of Brake Assist Systems to Regulation No. 13-H
Transmitted by the expert from the European Commission (EC) Informal Document No. GRRF-62-31 (62nd GRRF, 25-28 September 2007, agenda item 3(i)) Introduction of Brake Assist Systems to Regulation No. 13-H
EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL Lane Support Systems
 TEST PROTOCOL Lane Support Systems") EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL Lane Support Systems November 2017 EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL LANE SUPPORT SYSTEMS Table of Contents
EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL Lane Support Systems November 2017 EUROPEAN NEW CAR ASSESSMENT PROGRAMME (Euro NCAP) TEST PROTOCOL LANE SUPPORT SYSTEMS Table of Contents
Remote, Redesigned Air Bag Special Study Dynamic Science, Inc., Case Number ( C) 1998 Nissan Altima Texas August/1998
 1998 Nissan Altima Texas August/1998") Remote, Redesigned Air Bag Special Study Dynamic Science, Inc., Case Number ( 1998-49-136C) 1998 Nissan Altima Texas August/1998 Technical Report Documentation Page 1. Report No. 2. Government Accession
Remote, Redesigned Air Bag Special Study Dynamic Science, Inc., Case Number ( 1998-49-136C) 1998 Nissan Altima Texas August/1998 Technical Report Documentation Page 1. Report No. 2. Government Accession
Economic and Social Council
 United Nations Economic and Social Council ECE/TRANS/WP.29/2017/10 Distr.: General 22 December 201 Original: English Economic Commission for Europe Inland Transport Committee World Forum for Harmonization
United Nations Economic and Social Council ECE/TRANS/WP.29/2017/10 Distr.: General 22 December 201 Original: English Economic Commission for Europe Inland Transport Committee World Forum for Harmonization
OnGuard Display Operating Instructions
 Issued 09-09 Technical Bulletin Issued 1 Technical 09-09 Bulletin OnGuard Display Operating Instructions Hazard Alert Messages Read and observe all Warning and Caution hazard alert messages in this publication.
Issued 09-09 Technical Bulletin Issued 1 Technical 09-09 Bulletin OnGuard Display Operating Instructions Hazard Alert Messages Read and observe all Warning and Caution hazard alert messages in this publication.
Heating Comparison of Radial and Bias-Ply Tires on a B-727 Aircraft
 'S Heating Comparison of Radial and Bias-Ply Tires on a B-727 Aircraft November 1997 DOT/FAA/AR-TN97/50 This document is available to the U.S. public through the National Technical Information Service
'S Heating Comparison of Radial and Bias-Ply Tires on a B-727 Aircraft November 1997 DOT/FAA/AR-TN97/50 This document is available to the U.S. public through the National Technical Information Service
126-TRC SAFETY COMPLIANCE TESTING FOR FMVSS 126 (Indicant) Electronic Stability Control Systems
 Electronic Stability Control Systems") 126-TRC-07-004 SAFETY COMPLIANCE TESTING FOR FMVSS 126 (Indicant) Electronic Stability Control Systems Toyota Motor Company 2008 Toyota Highlander NHTSA No. C85104 TRANSPORTATION RESEARCH CENTER INC. 10820
126-TRC-07-004 SAFETY COMPLIANCE TESTING FOR FMVSS 126 (Indicant) Electronic Stability Control Systems Toyota Motor Company 2008 Toyota Highlander NHTSA No. C85104 TRANSPORTATION RESEARCH CENTER INC. 10820
Lane Keep Assist. Lane markings WARNING S01892
 The stereo cameras detect lane markings (including Botts dots) of the lane and the system assists the steering operation by working with the electric power steering to help keep your vehicle in its lane
The stereo cameras detect lane markings (including Botts dots) of the lane and the system assists the steering operation by working with the electric power steering to help keep your vehicle in its lane
REPORT NUMBER TR-P NC SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS CHRYSLER LLC 2009 DODGE JOURNEY 5-DOOR MPV
 REPORT NUMBER TR-P29009-02-NC SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS CHRYSLER LLC 2009 DODGE JOURNEY 5-DOOR MPV NHTSA NUMBER: C90302 PREPARED BY: KARCO ENGINEERING, LLC. 9270
REPORT NUMBER TR-P29009-02-NC SAFETY COMPLIANCE TESTING FOR FMVSS 124 ACCELERATOR CONTROL SYSTEMS CHRYSLER LLC 2009 DODGE JOURNEY 5-DOOR MPV NHTSA NUMBER: C90302 PREPARED BY: KARCO ENGINEERING, LLC. 9270
SFI SPECIFICATION 35.2 EFFECTIVE: DECEMBER 29, 2014 *
 SFI SPECIFICATION 35.2 EFFECTIVE: DECEMBER 29, 2014 * PRODUCT: Heavy Duty Stock Car Steel Wheels 1.0 GENERAL INFORMATION 1.1 This SFI Specification establishes uniform test procedures and minimum standards
SFI SPECIFICATION 35.2 EFFECTIVE: DECEMBER 29, 2014 * PRODUCT: Heavy Duty Stock Car Steel Wheels 1.0 GENERAL INFORMATION 1.1 This SFI Specification establishes uniform test procedures and minimum standards
Remote, Redesigned Air Bag Special Study FOR NHTSA S INTERNAL USE ONLY Dynamic Science, Inc., Case Number ( E) 1998 Buick Century Colorado
 1998 Buick Century Colorado") Remote, Redesigned Air Bag Special Study FOR NHTSA S INTERNAL USE ONLY Dynamic Science, Inc., Case Number (1998-075-803E) 1998 Buick Century Colorado October, 1998 Technical Report Documentation Page 1.
Remote, Redesigned Air Bag Special Study FOR NHTSA S INTERNAL USE ONLY Dynamic Science, Inc., Case Number (1998-075-803E) 1998 Buick Century Colorado October, 1998 Technical Report Documentation Page 1.
E/ECE/324/Rev.1/Add.78/Rev.2/Amend.3 E/ECE/TRANS/505/Rev.1/Add.78/Rev.2/Amend.3
 7 December 2017 Agreement Concerning the Adoption of Harmonized Technical United Nations Regulations for Wheeled Vehicles, Equipment and Parts which can be Fitted and/or be Used on Wheeled Vehicles and
7 December 2017 Agreement Concerning the Adoption of Harmonized Technical United Nations Regulations for Wheeled Vehicles, Equipment and Parts which can be Fitted and/or be Used on Wheeled Vehicles and
Wheel lift sensors used during dynamic testing of light vehicles
 SUBJECT: Wheel lift sensors used during dynamic testing of light vehicles TO: D.O.T. Docket No. NHTSA- 2001-9663- FROM: Patrick Boyd, NHTSA NVS-123 DATE: March 31, 2003 The attached description briefly
SUBJECT: Wheel lift sensors used during dynamic testing of light vehicles TO: D.O.T. Docket No. NHTSA- 2001-9663- FROM: Patrick Boyd, NHTSA NVS-123 DATE: March 31, 2003 The attached description briefly
Development of Turning Templates for Various Design Vehicles
 Transportation Kentucky Transportation Center Research Report University of Kentucky Year 1991 Development of Turning Templates for Various Design Vehicles Kenneth R. Agent Jerry G. Pigman University of
Transportation Kentucky Transportation Center Research Report University of Kentucky Year 1991 Development of Turning Templates for Various Design Vehicles Kenneth R. Agent Jerry G. Pigman University of
VERIFICATION & VALIDATION REPORT of MGS Barrier Impact with 1100C Vehicle Using Toyota Yaris Coarse FE Model
 VERIFICATION & VALIDATION REPORT of MGS Barrier Impact with 1100C Vehicle Using Toyota Yaris Coarse FE Model CCSA VALIDATION/VERIFICATION REPORT Page 1 of 4 Project: CCSA Longitudinal Barriers on Curved,
VERIFICATION & VALIDATION REPORT of MGS Barrier Impact with 1100C Vehicle Using Toyota Yaris Coarse FE Model CCSA VALIDATION/VERIFICATION REPORT Page 1 of 4 Project: CCSA Longitudinal Barriers on Curved,
KENTUCKY TRANSPORTATION CENTER
 Research Report KTC-08-10/UI56-07-1F KENTUCKY TRANSPORTATION CENTER EVALUATION OF 70 MPH SPEED LIMIT IN KENTUCKY OUR MISSION We provide services to the transportation community through research, technology
Research Report KTC-08-10/UI56-07-1F KENTUCKY TRANSPORTATION CENTER EVALUATION OF 70 MPH SPEED LIMIT IN KENTUCKY OUR MISSION We provide services to the transportation community through research, technology
Love. It s what makes a Subaru, a Subaru.
 Love. It s what makes a Subaru, a Subaru. Quick Guide ASCENT 2019 Table of Contents EyeSight 2 EyeSight and EyeSight Functions 3 EyeSight Operation 4-5 Steering Wheel Controls 6 Lane Departure Warning
Love. It s what makes a Subaru, a Subaru. Quick Guide ASCENT 2019 Table of Contents EyeSight 2 EyeSight and EyeSight Functions 3 EyeSight Operation 4-5 Steering Wheel Controls 6 Lane Departure Warning
STATUS OF NHTSA S EJECTION MITIGATION RESEARCH. Aloke Prasad Allison Louden National Highway Traffic Safety Administration
 STATUS OF NHTSA S EJECTION MITIGATION RESEARCH Aloke Prasad Allison Louden National Highway Traffic Safety Administration United States of America Stephen Duffy Transportation Research Center United States
STATUS OF NHTSA S EJECTION MITIGATION RESEARCH Aloke Prasad Allison Louden National Highway Traffic Safety Administration United States of America Stephen Duffy Transportation Research Center United States
SFI SPECIFICATION 15.4 EFFECTIVE: JULY 20, 2010 * PRODUCT: Top Fuel and Funny Car Drag Race Drive Beadlock Wheels
 SFI SPECIFICATION 15.4 EFFECTIVE: JULY 20, 2010 * PRODUCT: Top Fuel and Funny Car Drag Race Drive Beadlock Wheels 1.0 GENERAL INFORMATION 1.1 This SFI Specification establishes uniform test procedures
SFI SPECIFICATION 15.4 EFFECTIVE: JULY 20, 2010 * PRODUCT: Top Fuel and Funny Car Drag Race Drive Beadlock Wheels 1.0 GENERAL INFORMATION 1.1 This SFI Specification establishes uniform test procedures
SAFETY COMPLIANCE TESTING FOR FMVSS 111. REARVIEW MIRRORS (Other Than School Buses)
") REPORT NO. 111-KAR-08-003 SAFETY COMPLIANCE TESTING FOR FMVSS 111 REARVIEW MIRRORS (Other Than School Buses) 2008 DODGE GRAND CARAVAN SE 5-DOOR MPV NHTSA NO: C80305 PREPARED BY: KARCO ENGINEERING LLC.
REPORT NO. 111-KAR-08-003 SAFETY COMPLIANCE TESTING FOR FMVSS 111 REARVIEW MIRRORS (Other Than School Buses) 2008 DODGE GRAND CARAVAN SE 5-DOOR MPV NHTSA NO: C80305 PREPARED BY: KARCO ENGINEERING LLC.
A dream? Dr. Jürgen Bredenbeck Tire Technology Expo, February 2012 Cologne
 Rolling resistance measurement on the road: A dream? Dr. Jürgen Bredenbeck Tire Technology Expo, 14.-16. February 2012 Cologne Content Motivation Introduction of the used Measurement Equipment Introduction
Rolling resistance measurement on the road: A dream? Dr. Jürgen Bredenbeck Tire Technology Expo, 14.-16. February 2012 Cologne Content Motivation Introduction of the used Measurement Equipment Introduction
Love. It s what makes a Subaru, a Subaru.
 Love. It s what makes a Subaru, a Subaru. Quick Guide 2018 Table of Contents EyeSight 2 EyeSight and EyeSight Functions 3 EyeSight Operation 4-5 Steering Wheel Controls 6 Lane Departure Warning and Pre-Collision
Love. It s what makes a Subaru, a Subaru. Quick Guide 2018 Table of Contents EyeSight 2 EyeSight and EyeSight Functions 3 EyeSight Operation 4-5 Steering Wheel Controls 6 Lane Departure Warning and Pre-Collision
Love. It s what makes a Subaru, a Subaru. Quick Guide IMPREZA
 Love. It s what makes a Subaru, a Subaru. Quick Guide IMPREZA 2017 Table of Contents EyeSight 2 EyeSight and EyeSight Functions 3 EyeSight Operation 4 Steering Wheel Controls 5 Lane Departure Warning and
Love. It s what makes a Subaru, a Subaru. Quick Guide IMPREZA 2017 Table of Contents EyeSight 2 EyeSight and EyeSight Functions 3 EyeSight Operation 4 Steering Wheel Controls 5 Lane Departure Warning and
(2111) Digital Test Rolling REVISED 07/22/14 DO NOT REMOVE THIS. IT NEEDS TO STAY IN FOR THE CONTRACTORS. SP
 Digital Test Rolling REVISED 07/22/14 DO NOT REMOVE THIS. IT NEEDS TO STAY IN FOR THE CONTRACTORS. SP") S-xx (2111) Digital Test Rolling REVISED 07/22/14 DO NOT REMOVE THIS. IT NEEDS TO STAY IN FOR THE CONTRACTORS. SP2014-54.2 The Veda Software and Digital Test Rolling forms are available on the MnDOT Advanced
S-xx (2111) Digital Test Rolling REVISED 07/22/14 DO NOT REMOVE THIS. IT NEEDS TO STAY IN FOR THE CONTRACTORS. SP2014-54.2 The Veda Software and Digital Test Rolling forms are available on the MnDOT Advanced