1104 Highway 27 W Alexandria, MN
|
|
|
- Leon Mark Shelton
- 6 years ago
- Views:
Transcription


1 1104 Highway 27 W Alexandria, MN
2 APPLICATION GUIDE

3 A certified leader in precision engineered machines, parts, gears, and electro-mechanical products for over 30 years. Table of Contents HTSR High Torque to Space Ratio Spiroid and Helicon - Gear Form Spiroid vs Helicon... 3 Key Characteristics and Benefits - Instantaneous Line of Contact Simultaneous Tooth Contact Materials Selection and Versatility Strength and Durability Ratio Flexibility Quiet Operation Hi Side / Low Side... 7 Spiroid and Helicon Fill the Design Gap... 7 Application Data - Spiroid Data Factors Spiroid Charts Helicon Data Factors Helicon Charts Assembly and Installation - Housing Inspection Pinion Assembly Gear Assembly Backlash Check Backlash Chart Application Data Sheet Other ITW Products and Services

4


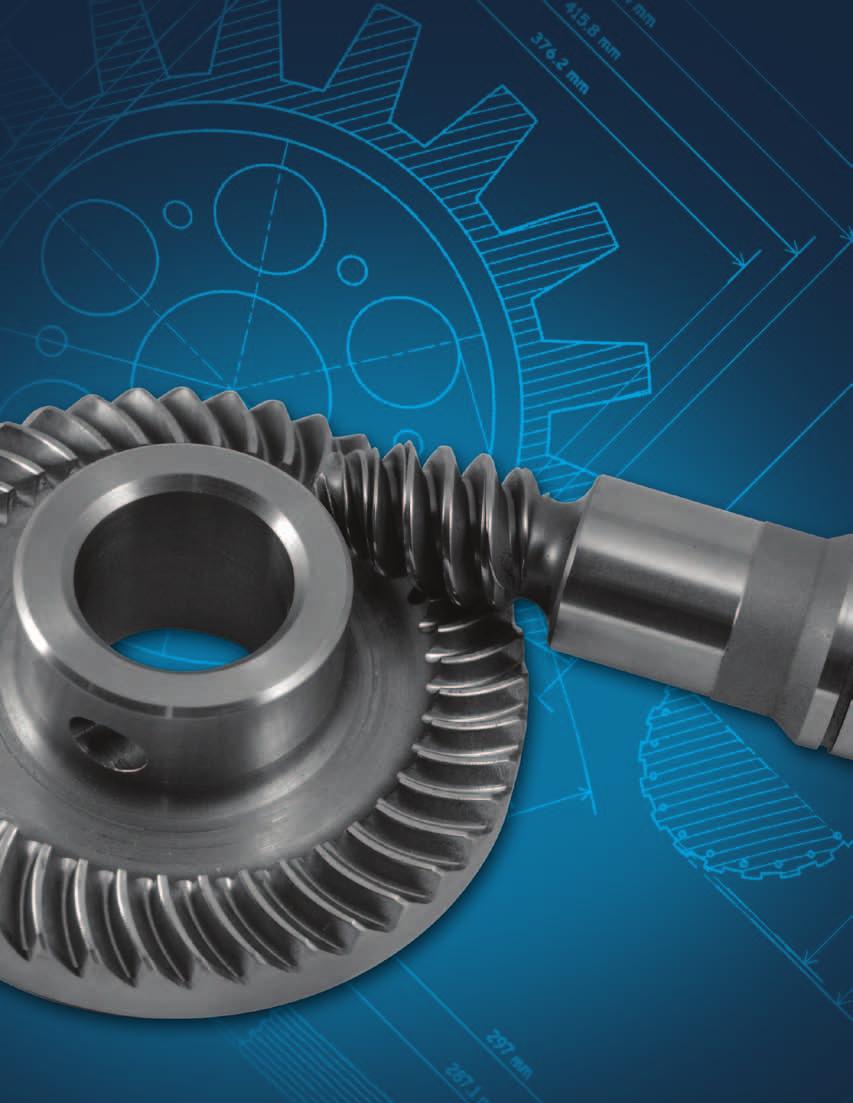
5 HTSR (High Torque to Space Ratio) is an exclusive line of gearing and coupling products made possible by software, tooling, and manufacturing methods that are the intellectual property of Illinois Tool Works and ITW Heartland. As the acronym indicates, the real value of these products lay in their ability to transmit relatively large amounts of power in compact spaces and with minimal weight. Rather than modifying an application to the limited capability of a particular standard gearing method, HTSR Gearing is designed to meet some of the most difficult application requirements that exist in the Aerospace, Defense, Robotics, Medical, and General Industrial markets. In fact, HTSR products have been meeting these difficult application requirements for over 50 years. Simply put, there are times when traditional gearing methods simply will not provide the power and torque that are required within given space or weight limitations. It is in these times that HTSR products will rise to the occasion. The following represent the HTSR Gearing product profile: Spiroid right angle gearing Helicon right angle gearing Concurve spur-type gearing Endicon indexing and coupling rings This application guide will focus exclusively on Spiroid and Helicon right angle gearing. 2






6 Spiroid & Helicon Gear Form Spiroid and Helicon gears are members of the skew-axis gear family and are designed to broaden gearing design opportunities restricted by the physical limitations of conventional gearing. Spiroid and Helicon gear sets consist of two members; pinion and gear. By definition, the pinion has fewer teeth and is normally the driving member while the driven member is a face gear. Spiroid and Helicon pinions operate between the extreme operating positions of bevel gear pinions and worms. See Figure 1. The advantages of Spiroid gears stem from two facts. First, Spiroid/Helicon gears have more teeth in contact than a worm drive of equal gear diameter. See Figures 2 and 3. Secondly, in contrast to worm, hypoid, and spiral bevel gears, Spiroid/Helicon gears are insensitive to normal mounting variations. band of contact ROTATION OF PINION WORM Direction of sliding velocity Radius of curvature Spiroid vs. Helicon The difference between Spiroid and Helicon can be found in their respective pinions. Whereas Helicon pinions are cylindrical and typically engaging a flat-faced gear, Spiroid pinions are tapered and designed to engage a beveled gear face. See Figure 4. GEAR TOOTH PINION TOOTH SPIROID r R DIRECTION COMPONENT OF NORMAL FORCE NORMAL FORCE WORM NORMAL FORCE Friction FORCE Since tapered Spiroid pinions engage the hypotenuse of a beveled face gear and thus allow for more thread/tooth contact, Spiroid gear sets typically allow for greater torque output with slightly less efficiency than its Helicon equal. MOTION OF PINION TOOTH ROTATION OF GEAR Figure 3 COMPONENT OF FRICTION FORCE WORM GEAR ITW SPIROID GEAR SPIROID/HELICON GEAR ITW HELICON GEAR HYPOID GEAR SPIRAL BEVEL GEAR Spiroid 90 Shaft Angle Spiroid Acute Shaft Angle Helicon 90 Shaft Angle Helicon Acute Shaft Angle Figure 1 Figure 4 3



7 Key Characteristics and Benefits Instantaneous Line of Contact Before describing specific Spiroid and Helicon gear set characteristics, it should be pointed out that all gears can, at best, obtain only line contact under no load at any instantaneous position of mesh. Total length of line contact is one criterion of gear load carrying capabilities. Another is contact line movement during the engagement cycle. The contact line should not be stationary. It should sweep the entire available tooth surface. Movement or sweep of contact line brings freshly lubricated and cooler areas into mesh. This applies to all gears. Other factors, such as relative curvature of contacting surface and inclination of the contact lines relative to sliding velocity, must also be considered. Contact lines of spiroid pinion and gear Figure 5 In Spiroid and Helicon pinions, the line of instantaneous contact is an almost radial line on each convolution of the pinion thread. See Figure 5. It is almost perpendicular to the sliding velocity, and results in a full sweep of contact on the pinion and gear. By contrast, the instantaneous line of contact on worm gears is only slightly inclined to the direction of sliding velocity. This results in a narrow band of contact on the worm thread. See Figure 3 on page 3. 4
8 Simultaneous Tooth Contact Furthermore, Spiroid and Helicon gears have many teeth in simultaneous contact. See figure 5 on page 4. The number of teeth in contact depends on the number of teeth in the gear member. Generally, 10% of the gear teeth are in simultaneous contact. However, even in the low ratio range, Spirod and Helicon have two to three times the number of teeth in contact than on worm gears. On higher ratios, there are many times more. Materials Selection and Versatility The more favorable contact conditions and lower sliding between Spiroid and Helicon gear members permit the use of hardenable grades of steel for both gears and pinions. This, plus the ideal lubricating film formation and the movement of contact lines, makes the use of hardened steelon-steel an ideal material for both Spiroid and Helicon gear sets. This is particularly advantageous in situations where high surface durability, high static loads, running loads, or shock loads are encountered. In worm gears, by contrast, the usual selection is hardened steel worm meshing with a bronze gear. Strength and Durability Givin all of the previously mentioned characteristics, it is clear that many factors combine to give Helicon or Spiroid gears their superior strength and high surface durability characteristics. These factors are: The number of teeth in simultaneous contact The individual contact lines in relation to the sliding velocity Large radii of curvature at the contact lines Greater latitude of material choices Ratio Flexibility For any gear of a given diameter, a higher ratio means more teeth which means a finer pitch. Since contact between the Helicon or Spiroid pinion and gear extends over the entire length of the pinion, a finer pitch or shorter lead gives a proportionately increased number of teeth in simultaneous contact, with very little sacrifice in capacity. With worm gears, for instance, the upper ratio limit is usually around 80:1. After selecting a pitch sufficient to carry the required load (bearing in mind that, at most, the worm set has two teeth in contact) the gear risks becoming too large. Therefore, in the case of worm gearing, higher ratios are usually handled by multiple reductions. Helicon or Spiroid gears, however, do not have an upper limitation. For a given gear diameter, a higher ratio means a shorter lead, finer pitch, and more teeth in contact. As a result, single reduction ratios above 300:1 are possible. 5


9 Key Characteristics and Benefits cont. Quiet Operation Gear accuracy is the most important factor in obtaining minimal vibration and maximum quietness. However, at high pitch line velocities even small inaccuracies can produce a pronounced noise, particularly if they occur at regular frequencies. Therefore, to achieve quiet gears, accuracy is combined with modifications in the profile and lead of the gear teeth, permitting them to engage gradually. It was previously pointed out that the contact lines on Spiroid and Helicon pinions are nearly radial, and sweep the entire length of the teeth. At such great tooth length, very effective modifications can be made at the entering and leaving sides, so that pinion teeth cam gently into and out of action. The commonly used term for these modifications is crowning. Incorporated in either the pinion or the gear, and in conjunction with the large number of teeth in simultaneous engagement, it accounts for the fact that Spiroid and Helicon gears are inherently quiet. The efficiency of a gear set is a measure of the power lost in the gear mesh which turns into heat that must be dissipated. Thus a gear set which is 70% efficient loses 30% of the power input and transmits 70%. The efficiency of Spiroid and Helicon gear sets, as well as all other gear types, is a function of the gear set geometry, i.e. the efficiency angles, and the coefficient of friction. Because of the previously stated geometry and ideal lubricating characteristics of Spiroid and Helicon gear sets, higher efficiencies are possible relative to worm gears. As with all other gear types, the higher the gear set ratio, the lower the efficiency. Sometimes, however, the low efficiency can be an asset, particularly when self-locking is desired. Self-locking is the ability of the gear to drive the pinion, or back drive, and is a characteristic common to higher ratio gear sets. Special design considerations can accommodate application requirements of higher dynamic efficiencies or self-locking efficiencies through the custom design versatility of Spiroid or Helicon gearing. Hi Side / Low Side Spiroid and Helicon tooth pressure angles are not symmetrical. See Figure 6. However, Spiroid and Helicon gearing operate at roughly the same efficiency and load rating in either direction of pinion rotation even though direction and magnitude of the forces on the teeth are different. While the resultant tooth forces are largely in the axial direction of the pinion (particularly in the higher ratio range) they also have components working in the radial direction of the pinion, which tend to separate the pinion and gear teeth. The radial component is greater when the high pressure angle of the tooth does the driving. See description of Tooth Load Components given in the Helicon & Spiroid gear set size selection sections. Modern engineering attempts to extract the most from any given opportunity. Therefore, it is preferable in the interest of maximum bearing life to let the low pressure angle side of the pinion threads do the driving on uni-directional drives. 6

10 Spiroid and Helicon Fill the Design Gap There are definite applications for both parallel axis and skew-axis gear systems. Selection depends on many factors including cost, space and power availability, ratio and torque requirements, as well as production or assembly limitations. Spiroid and Helicon gear systems offer increased design opportunities with these important obtainable features: Simple and positive control of backlash Ease of assembly / flexible mounting tolerances High level of accuracy Wide range of reduction ratios Superior shock strength Superior torque transmission Quiet operation Material versatility Compact, lightweight drives High stiffness Savings due to design flexibility 7
11 Application Data POSITION ONLY Spiroid Data Factors This section includes tables for gear set performance, pertinent dimensions and tooth loads. Standard design data for Spiroid gear sets is given in Tables represented on pages These gear sets are well-balanced designs suitable for the majority of general purpose applications. The tables are design tools to be used as a guide to allow the engineer to make preliminary size selection of a Helicon gear set. The gear sets listed in the table do not represent standard off-theshelf hardware. By varying both tooth and blank proportions, it is possible to place special emphasis on such specific performance characteristics as efficiency, self-locking, reversibility, high strength, exceptionally smooth angular velocity, etc. The design possibilities featuring and blending the various characteristics are, therefore, quite numerous. In making a size selection, apply the material and service factors from Tables A and B. Divide catalog ratings or multiply driven load by appropriate service and material factors. Then, select the gear set with the proper rating for the given input speed and ratio requirements. If a gear set is desired which falls in between two standard sizes, take the data from the closest set and scale all linear dimensions either up or down as needed. For special designs requiring particular performance characteristics or additional sizing options, please contact ITW Heartland representatives. Spiroid Gear Tooth Load Components When selecting bearings, it is necessary to know the direction and magnitude of the tooth forces so that bearing relations may be determined. The rating tables give the following unit tooth loads for all Helicon gear sets: Fx unit axial force acting on pinion Fy unit separating force acting on pinion Fz unit tangential force acting on pinion (Units for above forces are pounds/inch-pound output torque) 1. Hi-Lo side forces are shown acting on the gear. 2. Forces act on the gear tooth at mid-tooth depth and at mid-face on the center distance. 3. Forces on the pinion are in the reverse direction from those shown. Tooth load components equals lbs./inch-lb. output torque Note: Additional reduction ratios may be possible depending on application parameters 8 Table 8 XX


12 Materials Helicon gear set size data tables are based on the following material combinations: 1. For gear O.D. less than 16 : Both pinion and gear are SAE 8620 Steel, carburize hardened to 60 R.C. Lubrication For steel-on-steel applications, full synthetic extreme pressure oil is recommended. For cases where normal shock-free service is expected, SAE grade 90 should be used. For cases where heavy duty or high shock loading is expected, SAE grade 140 should be used. For steel-on-bronze applications, full synthetic extreme pressure oil that is rated for usage with enclosed worm drives operating at medium to high speeds is recommended. Note: oil fill level should cover the gear set mesh Service Factor Horsepower and torque ratings are based on a unity service factor (1.0) as defined the table to the right. The ratings given in the tables are surface durability capacities and do not take into account any thermal limits. Rating adjustment factors for gear materials other than steel - mating with a hardened pinion. MATERIAL GEAR ONLY Powdered Iron Alloy Sintered and Hardened.65 Molded Plastics.25 Aluminum Bronze.80 Die Cast Aluminum.35 Shell Molded Ductile Iron.40 Prime Mover Duration of Service Uniform Moderate Shock Electric Motor Occasional 1/2 hr./day total (Normal service) Intermittent 2 hr./day total hours per day hours per day Electric Motor Occasional 1/2 hr./day total (More than 10 Intermittent 2 hr./day total starts per hour) 10 hours per day hours per day Multi-Cylinder Occasional 1/2 hr./day total Internal Combustion Intermittent 2 hr./day total Engine 10 hours per day hours per day Single Cylinder Occasional 1/2 hr./day total Internal Combustion Intermittent 2 hr./day total Engine 10 hours per day hours per day Temperature The maximum sustained operating oil sump temperature should not exceed 180 F. Oil level should cover gear set mesh. Driven Machine Load Classifications Heavy Shock 9
13 1.875" Outside Diameter Helicon Gear Ratio Details Diagram A POSITION ONLY POSITION ONLY The basic dimensional parameters of Spiroid and Helicon gear sets shown in Diagram A relate to gear and pinion interface. Center distance and pinion thread diameter specifications are intended to be guides, and can be found in the bottom sections of the charts located on pages Pinion and gear mounting distances are flexible, and can be specified depending on application requirements. Performance Ratings " O.D. Helicon RPM Output 4:1 6:1 8:1 10:1 12:1 14:1 17:1 21:1 25:1 31:1 38:1 47:1 58:1 Diagram B Loading vectors are indicated in Diagram B by the directional arrows. Load multiplier factors can be found in the bottom sections of the charts located on pages Note that.001 N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A 1 TQ Out TQ Out there are typically differences in load factors between low side and high side drive TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out Dimension Data Center Distance Pinion Diameter Pressure Angle - Lo Pressure Angle - Hi Tooth Load Data Fx Driving Side Hi Fy Fz Fx Driving Side Lo Fy Fz Note: Additional reduction ratios may be possible depending on application parameters Note: Data intended for general reference purposes only and may change as application parameters become further defined 10 Table 8 XX
14 C Dia a Pinion od F Dia max Diagram A F Z - LO F Z - LO Tooth lo p.a. hi side drive F Y - LO F X - HI F X - HI F Z - HI LO side drive F Z - HI hi side drive LO side drive Diagram B 11
15 1.875" Outside Diameter Helicon 1.500" O.D. Spiroid 12 Performance Ratings - RPM Output POSITION 10:1 ONLY 12:1 14:1 17:1 21:1 25:1 POSITION 31:1 38:1 ONLY 47:1 1 TQ Out TQ Out N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A Performance Ratings ".021 O.D..025 Helicon RPM Output 200 TQ 4:1 Out 6:176 8: :1 9812: : :1 21: :110931: : : :1 HP.001Out N/A.034 N/A.028 N/A.030 N/A.045 N/A.022 N/A N/A.018 N/A.016 N/A.013 N/A.011 N/A N/A 1 TQ Out TQ Out TQ Out HP 115Out TQ.914 Out TQ Out HP 108Out TQ.921 Out TQ Out HP.926 Out TQ.219 Out TQ Out HP.934 Out TQ.306 Out TQ Out HP.386 Out TQ Out TQ 83Out HP.517 Out TQ Out TQ 76Out TQ Out HP 70 Out TQ.952 Out TQ Out HP 63Out N/A TQ.957 Out TQ Out TQ Out Dimension Data Center Distance TQ equals output torque in inch-lbs Pinion Diameter Dimension Pressure Data Angle - Lo Center Pressure Distance Angle Hi Pinion Diameter Pressure Angle Tooth - LoLoad 20 Data Pressure Angle - Hi Fx Driving Side Hi Fy Tooth Load Data Fz Fx Fx Driving Side Driving Hi Side Lo Fy Fy Fz Fz Fx Driving Side Lo Fy Fz Tooth load components equals lbs./inch-lb. output torque Note: Additional reduction ratios may be possible depending on application parameters Note: Rating Note: and reduction Data intended data provided for general for reference purposes only; and ITW may Spiroid change can as provide application recommendations parameters become for specific further application defined needs. Table 8 XX
16 1.875" O.D. Spiroid Performance Ratings RPM Output 10:1 12:1 14:1 17:1 21:1 25:1 31:1 38:1 47:1 58:1 1 TQ Out 100 TQ Out 200 TQ Out 300 TQ Out 600 TQ Out 900 TQ Out 1200 TQ Out 1750 TQ Out 2500 TQ Out 3600 TQ Out 6000 TQ Out TQ Out N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A Dimension Data Center Distance Pinion Diameter Pressure Angle - Lo Pressure Angle - Hi Tooth Load Data Driving Side Hi Driving Side Lo Fx Fy Fz Fx Fy Fz Note: Rating and reduction data provided for reference purposes only; ITW Spiroid can provide recommendations for specific application needs. 13
17 1.875" Outside Diameter Helicon 2.250" O.D. Spiroid 14 Performance Ratings RPM Output POSITION 10:1 ONLY 12:1 14:1 17:1 21:1 25:1 31:1 POSITION 38:1 ONLY 47:1 58:1 N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A 1 TQ Out TQ Out Performance Ratings ".056 O.D..056 Helicon RPM 200 Output TQ 4:1 Out 6: : : : : : :1 25: : : :135158: HP.001 Out N/A.104 N/A.089 N/A.080 N/A.079 N/A.068 N/A.057 N/A.050 N/A N/A.040 N/A.034 N/A.027N/A 1 TQ Out TQ Out TQ Out HP 115 Out TQ.914 Out TQ Out HP 108 Out TQ.921 Out TQ Out HP.926 Out TQ.219 Out TQ Out HP.934 Out TQ.306 Out TQ Out HP.386 Out TQ Out TQ 83 Out HP.517 Out TQ Out TQ 76 Out TQ Out TQ.952 Out TQ Out HP 63 Out TQ.957 Out TQ Out TQ equals output.962 torque.943 in inch-lbs TQ Out Dimension Data Center Distance TQ equals output torque in inch-lbs Pinion Diameter Dimension Pressure Data Angle - Lo Center Pressure Distance Angle Hi Pinion Diameter Pressure Tooth Angle - Lo Load 20Data Pressure Angle - Hi 35Fx Driving Side Hi Fy Tooth Load Data Fz Fx Fx Driving Driving Side HiSide Lo Fy Fy Fz Fz Fx Driving Tooth Side load Lo Fycomponents equals lbs./inch-lb output 0.441torque Fz Tooth load components equals lbs./inch-lb. output torque Note: Additional reduction ratios may be possible depending on application parameters Note: Rating Note: and reduction Data intended data provided for general for reference purposes only; and ITW may Spiroid change can as provide application recommendations parameters become for specific further application defined needs. Table 8 XX
18 3.000" O.D. Spiroid Performance Ratings RPM Output 10:1 12:1 14:1 17:1 21:1 25:1 31:1 38:1 47:1 58:1 1 TQ Out 100 TQ Out 200 TQ Out 300 TQ Out 600 TQ Out 900 TQ Out 1200 TQ Out 1750 TQ Out 2500 TQ Out 3600 TQ Out 6000 TQ Out TQ Out N/A N/A N/A TQ equals output torque in inch-lbs Dimension Data Center Distance Pinion Diameter Pressure Angle - Lo Pressure Angle - Hi Tooth Load Data Driving Side Hi Driving Side Lo Fx Fy Fz Fx Fy Fz Tooth load components equals lbs./inch-lb. output torque Note: Rating and reduction data provided for reference purposes only; ITW Spiroid can provide recommendations for specific application needs. 15
19 1.875" Outside Diameter Helicon 3.750" O.D. Spiroid 16 Performance Ratings RPM Output POSITION 10:1 ONLY12:1 14:1 17:1 21:1 25:1 31:1 POSITION 38:1 ONLY 47:1 58: TQ Out TQ Out Performance Ratings ".237 O.D..251 Helicon RPM 200 Output TQ 4:1 Out 6: : : : : : :1 25: : : : : HP.001 Out N/A.428 N/A.388 N/A.332 N/A.349 N/A.285 N/A.255 N/A N/A.210 N/A.179 N/A.141 N/A.120N/A TQ Out TQ 129 Out TQ Out HP 115 Out TQ.914 Out TQ Out HP 108 Out TQ.921 Out TQ Out HP.926 Out TQ.219 Out TQ Out HP.934 Out TQ.306 Out TQ Out HP.386 Out TQ Out TQ 83Out HP.517 Out TQ Out TQ 76Out TQ Out TQ.952 Out TQ Out HP 63Out TQ.957 Out TQ Out TQ equals output.962 torque.943 in inch-lbs Dimension TQ Out 44Data Center Distance TQ equals output torque in inch-lbs Pinion Diameter Dimension Pressure Data Angle - Lo Center Pressure DistanceAngle Hi Pinion Diameter Pressure Angle Tooth - LoLoad 20 Data Pressure Angle - Hi 35 Fx Driving Side Hi Fy Tooth Load Data Fz Fx 1.065Fx Driving Driving Side Hi Side Lo Fy 1.240Fy Fz 0.890Fz Fx Driving Tooth Side load Lo components equals lbs./inch-lb. output torque Fy Fz Tooth load components equals lbs./inch-lb. output torque Note: Additional reduction ratios may be possible depending on application parameters Note: Rating Note: and reduction Data intended data provided for general for reference purposes only; and ITW may Spiroid change can as provide application recommendations parameters become for specific further application defined needs. Table 8 XX
20 4.500" O.D. Spiroid Performance Ratings RPM Output 10:1 12:1 14:1 17:1 21:1 25:1 31:1 38:1 47:1 58:1 1 TQ Out 100 TQ Out 200 TQ Out 300 TQ Out 600 TQ Out 900 TQ Out 1200 TQ Out 1750 TQ Out 2500 TQ Out 3600 TQ Out 6000 TQ Out TQ Out TQ equals output torque in inch-lbs Dimension Data Center Distance Pinion Diameter Pressure Angle - Lo Pressure Angle - Hi Tooth Load Data Driving Side Hi Driving Side Lo Fx Fy Fz Fx Fy Fz Tooth load components equals lbs./inch-lb. output torque Note: Rating and Tooth reduction load data components provided equals for reference lbs./inch-lb. purposes output only; torque ITW Spiroid can provide recommendations for specific application needs. 17
21 1.875" Outside Diameter Helicon 5.250" O.D. Spiroid Performance Ratings RPM Output POSITION 10:1 ONLY12:1 14:1 17:1 21:1 31:1 38:1 POSITION 21:1 ONLY 47:1 58: TQ Out TQ Out Performance Ratings ".606 O.D..641 Helicon RPM 200 Output TQ 4:1 Out 6: : : : : : :1 25: : : : : HP.001 Out N/A N/A.978 N/A.839 N/A.885 N/A.771 N/A.649 N/A N/A.522 N/A.493 N/A.390 N/A.329N/A TQ Out TQ 129 Out TQ Out HP 115 Out TQ.914 Out TQ Out HP 108 Out TQ.921 Out TQ Out HP.926 Out TQ.219 Out TQ Out HP.934 Out TQ.306 Out TQ Out TQ Out TQ 83 Out HP.517 Out TQ Out TQ 76 Out TQ equals TQ Outoutput 70 torque 67in inch-lbs Dimension.878 Data TQ Out Center Distance Pinion Diameter Pressure TQ OutAngle 54- Lo Pressure Angle Hi Tooth TQ OutLoad 44 Data Fx Driving Side Hi TQ equals output torque Fy in inch-lbs Dimension Data Fz Center Distance 0.305Fx Driving Side Lo Pinion Diameter 0.589Fy Pressure Angle - Lo 20 Fz Pressure Angle - Hi Tooth load components equals lbs./inch-lb. output torque Tooth Load Data Fx Driving Side Hi Fy Fz Fx Driving Side Lo Fy Fz Tooth load components equals lbs./inch-lb. output torque Note: Additional reduction ratios may be possible depending on application parameters Note: Rating Note: and reduction Data intended data provided for general for reference purposes only; and ITW may Spiroid change can as provide application recommendations parameters become for specific further application defined needs. 18 Table 8 XX
22 6.000" O.D. Spiroid Performance Ratings RPM Output 10:1 12:1 14:1 17:1 21:1 25:1 31:1 38:1 47:1 58:1 1 TQ Out 100 TQ Out 200 TQ Out 300 TQ Out 600 TQ Out 900 TQ Out 1200 TQ Out 1750 TQ Out 2500 TQ Out 3600 TQ Out TQ equals output torque in inch-lbs Dimension Data Center Distance Pinion Diameter Pressure Angle - Lo Pressure Angle - Hi Tooth Load Data Driving Side Hi Driving Side Lo Fx Fy Fz Fx Fy Fz Tooth load components equals lbs./inch-lb. output torque Note: Rating and reduction data provided for reference purposes only; ITW Spiroid can provide recommendations for specific application needs. 19
23 Application Data POSITION ONLY Helicon Data Factors This section includes tables for gear set performance, pertinent dimensions and tooth loads. Standard design data for Helicon gear sets is given in Tables represented on pages These gear sets are well-balanced designs suitable for the majority of general purpose applications. The tables are design tools to be used as a guide to allow the engineer to make preliminary size selection of a Helicon gear set. The gear sets listed in the table do not represent standard off-theshelf hardware. By varying both tooth and blank proportions, it is possible to place special emphasis on such specific performance characteristics as efficiency, self-locking, reversibility, high strength, exceptionally smooth angular velocity, etc. The design possibilities featuring and blending the various characteristics are, therefore, quite numerous. In making a size selection, apply the material and service factors from Tables A and B. Divide catalog ratings or multiply driven load by appropriate service and material factors. Then, select the gear set with the proper rating for the given input speed and ratio requirements. If a gear set is desired which falls in between two standard sizes, take the data from the closest set and scale all linear dimensions either up or down as needed. For special designs requiring particular performance characteristics, please contac titw Heartland representatives. Helicon Gear Tooth Load Components When selecting bearings, it is necessary to know the direction and magnitude of the tooth forces so that bearing relations may be determined. The rating tables give the following unit tooth loads for all Helicon gear sets: Fx unit axial force acting on pinion Fy unit separating force acting on pinion Fz unit tangential force acting on pinion (Units for above forces are pounds/inch-pound output torque) 1. Hi-Lo side forces are shown acting on the gear. 2. Forces act on the gear tooth at mid-tooth depth and at mid-face on the center distance. 3. Forces on the pinion are in the reverse direction from those shown. Tooth load components equals lbs./inch-lb. output torque Note: Additional reduction ratios may be possible depending on application parameters 20 Table 8 XX

24 Materials Helicon gear set size data tables are based on the following material combinations: 1. For gear O.D. less than 16 : Both pinion and gear are SAE 8620 Steel, carburize hardened to 60 R.C. Lubrication For steel-on-steel applications, full synthetic extreme pressure oil is recommended. For cases where normal shock-free service is expected, SAE grade 90 should be used. For cases where heavy duty or high shock loading is expected, SAE grade 140 should be used. For steel-on-bronze applications, full synthetic extreme pressure oil that is rated for usage with enclosed worm drives operating at medium to high speeds is recommended. Note: oil fill level should cover the gear set mesh Service Factor Horsepower and torque ratings are based on a unity service factor (1.0) as defined in the table on the right. The ratings given in the tables are surface durability capacities and do not take into account any thermal limits. Rating adjustment factors for gear materials other than steel - mating with a hardened pinion. MATERIAL GEAR ONLY Powdered Iron Alloy Sintered and Hardened.65 Molded Plastics.25 Aluminum Bronze.80 Die Cast Aluminum.35 Shell Molded Ductile Iron.40 Prime Mover Duration of Service Uniform Moderate Shock Electric Motor Occasional 1/2 hr./day total (Normal service) Intermittent 2 hr./day total hours per day hours per day Electric Motor Occasional 1/2 hr./day total (More than 10 Intermittent 2 hr./day total starts per hour) 10 hours per day hours per day Multi-Cylinder Occasional 1/2 hr./day total Internal Combustion Intermittent 2 hr./day total Engine 10 hours per day hours per day Single Cylinder Occasional 1/2 hr./day total Internal Combustion Intermittent 2 hr./day total Engine 10 hours per day hours per day Temperature The maximum sustained operating oil sump temperature should not exceed 180 F. Oil level should cover gear set mesh. Driven Machine Load Classifications Heavy Shock 21

25 1.875" Outside Diameter Helicon POSITION ONLY Gear Ratio Details POSITION ONLY Diagram A The basic dimensional parameters of Spiroid and Helicon gear sets shown in Diagram A relate to gear and pinion interface. Center distance and pinion thread diameter specifications are intended to be guides, and can be found in the bottom sections of the charts located on pages Pinion and gear mounting distances are flexible, and can be specified depending on application requirements. Performance Ratings " O.D. Helicon RPM Output 4:1 6:1 8:1 10:1 12:1 14:1 17:1 21:1 25:1 31:1 38:1 47:1 58:1 Diagram B Loading vectors are indicated in Diagram B by the directional arrows. Load multiplier factors can be found in the bottom sections of the charts located on pages Note that.001 N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A 1 TQ Out TQ Out there are typically.914 differences in.788 load.741 factors.702 between.643 low.594 side.549 and.475 high.429 side drive TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out Dimension Data Center Distance Pinion Diameter Pressure Angle - Lo Pressure Angle - Hi Tooth Load Data Fx Driving Side Hi Fy Fz Fx Driving Side Lo Fy Fz Note: Additional reduction ratios may be possible depending on application parameters Note: Data intended for general reference purposes only and may change as application parameters become further defined 22 Table 8 XX
26 C Dia a Pinion od F Dia max Diagram A F Z - LO F Z - LO Tooth lo p.a. hi side drive F Y - LO F X - HI F X - HI F Z - HI LO side drive F Z - HI hi side drive LO side drive Diagram B 23
27 1.875" Outside Diameter Helicon 1.500" O.D. Helicon Performance Ratings POSITION ONLY POSITION ONLY RPM Output 4:1 6:1 8:1 10:1 12:1 14:1 17:1 21:1 25:1 31:1 38:1 47:1 1 TQ Out 100 TQ Out 200 TQ Out 300 TQ Out 600 TQ Out 900 TQ Out 1200 TQ Out 1750 TQ Out 2500 TQ Out 3600 TQ Out 6000 TQ Out TQ Out N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A TQ equals output torque in inch-lbs Dimension Data Center TQ equals Distance output torque in inch-lbs Pinion Diameter Pressure Angle - Lo Pressure Angle - Hi Tooth Load Data Driving Side Hi Driving Side Lo Fx Fy Fz Fx Fy Fz Tooth load components equals lbs./inch-lb. output torque Note: Rating Note: and reduction Data intended data provided for general for reference purposes only; and ITW may Spiroid change can as provide application recommendations parameters become for specific further application defined needs. 24 Table 8 XX
28 1.875" O.D. Helicon Performance Ratings RPM Output 4:1 6:1 8:1 10:1 12:1 14:1 17:1 21:1 25:1 31:1 38:1 47:1 58:1 1 TQ Out 100 TQ Out 200 TQ Out 300 TQ Out 600 TQ Out 900 TQ Out 1200 TQ Out 1750 TQ Out 2500 TQ Out 3600 TQ Out 6000 TQ Out TQ Out.001 N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A TQ equals output torque in inch-lbs Dimension Data Center Distance Pinion Diameter Pressure Angle - Lo Pressure Angle - Hi Tooth Load Data Driving Side Hi Driving Side Lo Fx Fy Fz Fx Fy Fz Tooth load components equals lbs./inch-lb. output torque Note: Rating and reduction data provided for reference purposes only; ITW Spiroid can provide recommendations for specific application needs. 25
29 1.875" Outside Diameter Helicon 2.250" O.D. Helicon 26 Performance Ratings RPM Output 4:1 POSITION 6:1 ONLY 8:1 10:1 12:1 14:1 17:1 21:1 POSITION 25:1 31:1 ONLY 38:1 47:1 58: N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A N/A 1 TQ Out TQ Out Performance Ratings ".071 O.D..062 Helicon RPM TQ Out Output 184 4:1 1796:1 1858: :1 12: : : :130425: : : :1 58: N/A.102 N/A.101 N/A.088 N/A N/A.073 N/A.079 N/A.063 N/A.057 N/A.042 N/A.037 N/A.029 N/A TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ OutTQ Out TQ OutTQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ equals output torque in inch-lbs TQ Out Dimension Data Center Distance TQ equals output torque in inch-lbs Pinion Diameter Pressure Angle Dimension - Lo Data Pressure Angle Center - Hi Distance Pinion Diameter Tooth Pressure Load Angle Data- Lo Pressure Angle - Hi Fx Driving Side Hi Fy Tooth Load Fz Data Fx Fx Driving Side Driving Lo Side Hi Fy Fy Fz Fz Fx Driving Side Lo Tooth load components Fy equals lbs./inch-lb output torque Fz Tooth load components equals lbs./inch-lb. output torque Note: Additional reduction ratios may be possible depending on application parameters Note: Rating Note: and reduction Data intended data provided for general for reference purposes only; and ITW may Spiroid change can as provide application recommendations parameters become for specific further application defined needs. Table 8 XX
30 3.000" O.D. Helicon Performance Ratings RPM Output 4:1 6:1 8:1 10:1 12:1 14:1 17:1 21:1 25:1 31:1 38:1 47:1 58:1 1 TQ Out 100 TQ Out 200 TQ Out 300 TQ Out 600 TQ Out 900 TQ Out 1200 TQ Out 1750 TQ Out 2500 TQ Out 3600 TQ Out 6000 TQ Out TQ Out TQ equals output torque in inch-lbs Dimension Data Center Distance Pinion Diameter Pressure Angle - Lo Pressure Angle - Hi Tooth Load Data Driving Side Hi Driving Side Lo Fx Fy Fz Fx Fy Fz N/A N/A N/A N/A Tooth load components equals lbs./inch-lb. output torque Note: Rating and reduction data provided for reference purposes only; ITW Spiroid can provide recommendations for specific application needs. 27
31 1.875" Outside Diameter Helicon 3.750" O.D. Helicon 28 Performance Ratings RPM Output 4:1 POSITION 6:1 ONLY 8:1 10:1 12:1 14:1 17:1 21:1 POSITION 25:1 31:1 ONLY 38:1 47:1 58:1 1 TQ Out 100 TQ Out HP Performance Out Ratings ".296 O.D..261 Helicon RPM TQ Out Output 847 4: : : : :1 14: : : : : : :1 58: N/A.420 N/A.417 N/A.366 N/A N/A.306 N/A.330 N/A.287 N/A.239 N/A.177 N/A.154 N/A.122 N/A TQ OutTQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ OutTQ Out TQ OutTQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ equals output torque in inch-lbs Dimension Data TQ Out Center Distance TQ equals output torque in inch-lbs Pinion Diameter Pressure Angle Dimension - Lo Data Pressure Angle Center - Hi Distance Pinion Diameter Tooth Pressure Load Data Angle - Lo Pressure Fx Angle Hi Driving Side Hi Fy Tooth Fz Load Data Fx Driving Side Fx Driving Lo Side Fy Hi Fy Fz Fz Fx Tooth load Driving components Side Lo equals lbs./inch-lb. output torque Fy Fz Tooth load components equals lbs./inch-lb. output torque Note: Additional reduction ratios may be possible depending on application parameters Note: Rating Note: and reduction Data intended data provided for general for reference purposes only; and ITW may Spiroid change can as provide application recommendations parameters become for specific further application defined needs. Table 8 XX
32 4.500" O.D. Helicon Performance Ratings RPM Output 4:1 6:1 8:1 10:1 12:1 14:1 17:1 21:1 25:1 31:1 38:1 47:1 58:1 1 TQ Out 100 TQ Out 200 TQ Out 300 TQ Out 600 TQ Out 900 TQ Out 1200 TQ Out 1750 TQ Out 2500 TQ Out 3600 TQ Out 6000 TQ Out TQ Out TQ equals output torque in inch-lbs Dimension Data Center Distance Pinion Diameter Pressure Angle - Lo Pressure Angle - Hi Tooth Load Data Driving Side Hi Driving Side Lo Fx Fy Fz Fx Fy Fz Tooth load components equals lbs./inch-lb. output torque Note: Rating and reduction data provided for reference purposes only; ITW Spiroid can provide recommendations for specific application needs. 29
33 1.875" Outside Diameter Helicon 5.250" O.D. Helicon Performance Ratings RPM Output 4:1 POSITION 6:1 ONLY 8:1 10:1 12:1 14:1 17:1 21:1 POSITION 25:1 31:1 ONLY 38:1 47:1 58: TQ Out TQ Out Performance Ratings ".797 O.D..663 Helicon RPM TQ Out Output : : : : : :1 17: : : : : :1 58: N/A N/A N/A.924 N/A N/A.777 N/A.837 N/A.729 N/A.608 N/A.523 N/A.390 N/A N/A TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ Out TQ OutTQ Out TQ OutTQ Out TQ equals output 2500 torque TQ Out in inch-lbs Dimension Data 3600 TQ Out Center Distance Pinion Diameter Pressure 6000 Angle - LoTQ Out Pressure Angle - Hi Tooth Load Data TQ Out Fx Driving Side TQ Hi equals Fy output 0.438torque in inch-lbs Dimension Fz Data Center Fx Distance Driving Side Pinion Lo Diameter Fy Pressure Angle - Lo Fz Pressure Angle - Hi Tooth load components equals lbs./inch-lb. output torque Tooth Load Data Fx Driving Side Hi Fy Fz Fx Driving Side Lo Fy Fz Tooth load components equals lbs./inch-lb. output torque Note: Additional reduction ratios may be possible depending on application parameters Note: Rating Note: and reduction Data intended data provided for general for reference purposes only; and ITW may Spiroid change can as provide application recommendations parameters become for specific further application defined needs. 30 Table 8 XX
34 6.000" O.D. Helicon Performance Ratings RPM Output 4:1 6:1 8:1 10:1 12:1 14:1 17:1 21:1 25:1 31:1 38:1 47:1 58:1 1 TQ Out 100 TQ Out 200 TQ Out 300 TQ Out 600 TQ Out 900 TQ Out 1200 TQ Out 1750 TQ Out 2500 TQ Out 3600 TQ Out TQ equals output torque in inch-lbs Dimension Data Center Distance Pinion Diameter Pressure Angle - Lo Pressure Angle - Hi Tooth Load Data Driving Side Hi Driving Side Lo Fx Fy Fz Fx Fy Fz Tooth load components equals lbs./inch-lb. output torque Note: Rating and reduction data provided for reference purposes only; ITW Spiroid can provide recommendations for specific application needs. 31



. This dimension is important and should be within ±. 001 in./in. (For example, a 3.")
35 Assembly and Installation How to assemble SPIROID and HELICON gearing Following the steps outlined in this guide will allow you to properly assemble your gear sets. Proper assembly ensures optimal operation of the many features offered by Spiroid and Helicon gearing. Applications can be designed to minimize the assembly effort. Many details affecting the mounting of the gear set can be designed and toleranced to allow simple assembly and assure adequate backlash and running clearances. The basic steps described here will permit maximum utilization of the simple and positive backlash control features of Spiroid and Helicon gearing. This procedure suggests the main steps to be followed to set and check the backlash and adjust for a precise amount of backlash. Both Spiroid and Helicon gearing can be adjusted for backlash by axial movement of the gear member. Spiroid gearing can be adjusted to a finer degree by axial movement of the pinion. Housing Inspection Proper alignment is critical for maximized gear set performance. In preparation for assembly of the gear set, the housing should be inspected. The center distance or A dimension should be established (Figure 1). This dimension is important and should be within ±. 001 in./in. (For example, a inch center distance would have a tolerance of ±0.003 inch). The alignment of the bores, which will locate the pinion and gear, should also be checked. The shaft angle (usually 90 ) should be within ±5. Deviation from the nominal shaft angle will cause a contact pattern shift between the assembled pinion and gear. Heavy localized contact toward the inner or outer band of gear teeth is not desirable. AXIAL TRAVEL OF GEAR DECREASE BACKLASH GEAR MOUNTING DISTANCE SECTION A-A TYPICAL SHIM LOCATION A (CENTER DISTANCE) PINION MOUNTING DISTANCE A A Pinion Assembly Proper position of the pinion is important. SHAFT ANGLE Assembly Figure 1 The pinion is normally the first gearing member to be assembled. The nominal pinion mounting distance should have been determined during the design and detail stage of the project. The pinion mounting distance is usually the dimension from the centerline of gear to the bearing shoulder (Figure 1). Both Spiroid and Helicon pinions have threads of constant lead and pressure angle; and are proportioned to be wider than the band of gear teeth that they mesh with. A Helicon pinion is insensitive to its axial position, but should be located within ±.030 inches of the nominal mounting distance. The Spiroid pinion, with the 5 angle, should be located within ±.010 inches of the nominal mounting distance. Axial Movement of the pinion must be avoided. It is important to check the pinion for axial play due to lack of preload in the bearings. Any axial movement will affect the backlash readings and give erroneous results. Axial movement in the pinion should be avoided in close backlash applications, as well as high precision, reverse loading, and Tooth reverse load components driving applications. equals lbs./inch-lb. output torque Note: Additional reduction ratios may be possible depending on application parameters 32 Table 8 XX



36 Gear Assembly (Either Spiroid or Helicon) The gear shaft bearings should be assembled and adjusted for proper fit. Assemble gear into mesh with pinion; position by spacer or shims to provide correct nominal mounting distance as specified by ITW Spiroid. Turn pinion by hand until gear rotates thru 360 and check for binding or tight spots; if this occurs, increase backlash. Check backlash Either clamp an indicator directly to the housing or clamp both the housing and indicator to a rigid plate. The accuracy of the indicator readings will depend on the rigidity of the mounting of the indicator in relation to the gear. The indicator finger should contact a gear tooth working face such that its travel is normal to this face. Prevent any axial or rotational movement of the pinion when checking backlash on the gear. Not all gear set assemblies lend themselves to having the gear teeth accessible for mounting an indicator typical of Figure 2. In such cases, it may be necessary to improvise an alternate surface for checking backlash. (See Figure 3) The output shaft or equivalent driven member can be utilized directly or as a mounting for a lever arm. Whatever is used must be rigidly mounted so the surface being checked indicates actual gear movement. The surface being checked with the indicator must be normal to the arc of rotation. (See Figure 2) The indicator need not be located exactly at a radius equivalent to the gear set center distance. Checking backlash at a larger or smaller radius must be adjusted linearly to the equivalent backlash at the radius of the center distance. (For example, if a inch center distance gear set has.001 inch backlash, this would be equivalent to.0005 inch backlash if measured at a inch radius or.002 inch backlash if measured at a inch radius.) A (C.D.) OUTPUT SHAFT SECURE PINION SHAFT EQUIV. A (C.D.) DIAL INDICATOR GEAR PINION IMPROVED CLAMP tangent to tooth surface Assembly Figure 2 travel of indicator finger normal to tooth surface line of travel of finger will automatically be tangent to a circle approximately equal to the center distance In some cases, a reliable backlash check cannot be made on the output or driven side of the gear. As an alternate, backlash checks might have to be made by checking the rotational lash of the pinion. The Spiroid Engineering Department would have to determine the equivalent circular movement of the pinion that would be equivalent to some increment of backlash. If the pinion is going to be used to determine the backlash, the gear must be secured so a true backlash reading can be established. After securing the gear, place a clamp on the pinion. Assembly Figure 3 33

37 Backlash Chart Spiroid and Helicon gearing can be used in zero backlash applications. However, the desire and need for zero backlash must be communicated early in the design process as many factors must be considered for a successful design. The following chart illustrates the backlash capabilities of Spiroid and Helicon gearing relative to the manufacturing processes that are used to produce them. As you can see, ITW Heartland s standard manufacturing methods will yield a backlash between and ArcMinutes. With enhanced manufacturing processes, near-zero backlash is achievable depending on the gear radius, tolerances, and thread grinding and lapping procedures that are used. It is important to note, however, that these processes will also add cost to a given project. ArcMinutes Per Gear Radius Radians (in.) ArcMin Block tolerances, standard thread 9.1 to 19 Good tolerances, finish ground thread, standard process controls 4.1 to 9 Above + light lapping, non-matched 0 to 4 Above + restrictive tolerances, heavier lapping, matched sets 34
38 APPLICATION DATA SHEET Contact Information Contact Title Company Address City State Zip Code Phone General Information TIMING Date Initiated Desired Quote Date Desired Design Confirmation Date APPLICATION STAGE Prototype 1st Article Production Other APPLICATION MARKET - check all that apply Commercial Military Aerospace / Aviation Robotics Medical Other APPLICATION PROJECTIONS Annual Usage Target price Quote Quantities Input Parameters Power Source AC DC Servo Other Pinion Speed (RPM) Dynamic Motor Torque (in. lbs) Max Motor Stall Torque (in. lbs) Max Normal Max Normal Output Parameters Sustained Torque (in. lbs) Max Stall Torque (in. lbs) Max Normal Max Normal Output Load Classification Shock Gradually Applied Constant Cyclic Intermittent Life Cycle / Environmental Design Life Hours Cycles Duty Cycle Definition (Frequency of Starts & Stops Duration of Operation Etc.) Duration of Service.5 hrs / day 2 hrs / day 10 hrs / day 24 hrs / day Other Rotation Single Direction Bi-directional Ambient Temperature ( F to F) Special Requirements Material Ratio to 1 Exact Approximate Backdrive Preference Desired Backlash Desired Space Claim Self Locking Backdriveable Stick-Slip Does Not Matter Degrees ArcMinutes ArcSeconds Radians In. Mm. Notes Please attach relevant sketch, prints, or model of the concept under consideration th Avenue Alexandria, MN Toll:







39 Other ITW Heartland Products and Services Strategic Assembly Solutions Experts in Automation, Innovation, and Motion Control The Strategic Assembly Solutions team provides a variety of manufacturing services that range from building custom automated industrial machines to sub-assemblies for other manufacturing companies. To deliver the world-class service and support that has come to be expected of this team, Strategic Assembly Solutions offers extensive product and process testing, as well as 24/7 spare parts service to cover global locations. Strategic Assembly Solutions serves many industries with an array of automated equipment and assembly capabilities including mechanical assembly, electrical controls, robotics, pneumatics and hydraulics and material handling. /StrategicAssembly Manufactured Products Custom Precision Machining With a focus on close-tolerance, complex, value added machined components, Manufactured Products offers a single-source machining capability for manufacturing companies across the globe. It also utilizes robust engineering resources and a strong investment in employees, machines, and processes to ensure that each customer gets good parts, on-time, headache-free. In particular, over the years Manufactured Products has developed a distinct expertise in complex, value-add Horizontal CNC machining for companies operating in a variety of markets. Its ability to remove more metal with less operations and part handling has won Manufactured Products the decades-long loyalty of more than a handful of successful customers. /ManufacturedProducts Tooth load components equals lbs./inch-lb. output torque Note: Additional reduction ratios may be possible depending on application parameters 36 Table 8 XX



40 ITW Gear Machines Your Experts in Automated Gear Inspection and Burnishing Designed to maximize accuracy, increase uptime, and maximize productivity, ITW Heartland s patented gear systems are the easiest to use and most reliable gear inspection machines in the industry. With two gear equipment patents, ITW Gear Machines high speed, automatic gear burnishing and inspection processes offer fast and easy changeover. In addition, it employs proprietary, easy-to-use gear inspection software to facilitate its gear measurement, data acquisition, SPC, count summaries, auto calibration, and error compensation processes. /GearMachines Contact us today for your manufacturing needs 37
Spiroid High Torque Skew Axis Gearing A TECHNICAL PRIMER F. EVERTZ, M. GANGIREDDY, B. MORK, T. PORTER & A. QUIST
 2016 Spiroid High Torque Skew Axis Gearing A TECHNICAL PRIMER F. EVERTZ, M. GANGIREDDY, B. MORK, T. PORTER & A. QUIST Table of Contents INTRODUCTION PAGE 02 SPIROID GEAR SET CHARACTERISTICS PAGE 03 BASIC
2016 Spiroid High Torque Skew Axis Gearing A TECHNICAL PRIMER F. EVERTZ, M. GANGIREDDY, B. MORK, T. PORTER & A. QUIST Table of Contents INTRODUCTION PAGE 02 SPIROID GEAR SET CHARACTERISTICS PAGE 03 BASIC
Copyright Notice. Small Motor, Gearmotor and Control Handbook Copyright Bodine Electric Company. All rights reserved.
 Copyright Notice Small Motor, Gearmotor and Control Handbook Copyright 1993-2003 Bodine Electric Company. All rights reserved. Unauthorized duplication, distribution, or modification of this publication,
Copyright Notice Small Motor, Gearmotor and Control Handbook Copyright 1993-2003 Bodine Electric Company. All rights reserved. Unauthorized duplication, distribution, or modification of this publication,
DUDLEY'S" HANDBOOK OF PRACTICAL GEAR DESIGN AND MANUFACTURE. Stephen P. Radzevich
 Second Edition DUDLEY'S" HANDBOOK OF PRACTICAL GEAR DESIGN AND MANUFACTURE Stephen P. Radzevich LßP) CRC Press VV J Taylors Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor
Second Edition DUDLEY'S" HANDBOOK OF PRACTICAL GEAR DESIGN AND MANUFACTURE Stephen P. Radzevich LßP) CRC Press VV J Taylors Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor
Spur Gears. Helical Gears. Bevel Gears. Worm Gears
 Spur s General: Spur gears are the most commonly used gear type. They are characterized by teeth which are perpendicular to the face of the gear. Spur gears are by far the most commonly available, and
Spur s General: Spur gears are the most commonly used gear type. They are characterized by teeth which are perpendicular to the face of the gear. Spur gears are by far the most commonly available, and
UNIT -I. Ans: They are specified by the no. of strands & the no. of wires in each strand.
 VETRI VINAYAHA COLLEGE OF ENGINEERING AND TECHNOLOGY, THOTTIAM, NAMAKKAL-621215. DEPARTMENT OF MECHANICAL ENGINEERING SIXTH SEMESTER / III YEAR ME6601 DESIGN OF TRANSMISSION SYSTEM (Regulation-2013) UNIT
VETRI VINAYAHA COLLEGE OF ENGINEERING AND TECHNOLOGY, THOTTIAM, NAMAKKAL-621215. DEPARTMENT OF MECHANICAL ENGINEERING SIXTH SEMESTER / III YEAR ME6601 DESIGN OF TRANSMISSION SYSTEM (Regulation-2013) UNIT
ME6601 DESIGN OF TRANSMISSION SYSTEMS
 SYED AMMAL ENGINEERING COLLEGE (Approved by the AICTE, New Delhi, Govt. of Tamilnadu and Affiliated to Anna University, Chennai) Established in 1998 - An ISO 9001:2008 Certified Institution Dr. E.M.Abdullah
SYED AMMAL ENGINEERING COLLEGE (Approved by the AICTE, New Delhi, Govt. of Tamilnadu and Affiliated to Anna University, Chennai) Established in 1998 - An ISO 9001:2008 Certified Institution Dr. E.M.Abdullah
11. GEAR TRANSMISSIONS
 11. GEAR TRANSMISSIONS 11.1. GENERAL CONSIDERATIONS Gears are one of the most important elements used in machinery. There are few mechanical devices that do not have the need to transmit power and motion
11. GEAR TRANSMISSIONS 11.1. GENERAL CONSIDERATIONS Gears are one of the most important elements used in machinery. There are few mechanical devices that do not have the need to transmit power and motion
Highest Precision: Dyna Series
 GAM can. Just ask! If you don t see exactly what you need, let us know. We can modify the Dyna Series gearboxes to meet your needs. Page 3 provides a list of commonly requested modifications to give you
GAM can. Just ask! If you don t see exactly what you need, let us know. We can modify the Dyna Series gearboxes to meet your needs. Page 3 provides a list of commonly requested modifications to give you
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF MECHANICAL ENGINEERING
 KINGS COLLEGE OF ENGINEERING DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK Sub Code/Name: ME 1352 DESIGN OF TRANSMISSION SYSTEMS Year/Sem: III / VI UNIT-I (Design of transmission systems for flexible
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK Sub Code/Name: ME 1352 DESIGN OF TRANSMISSION SYSTEMS Year/Sem: III / VI UNIT-I (Design of transmission systems for flexible
Therefore, it is the general practice to test the tooth contact and backlash with a tester. Figure 19-5 shows the ideal contact for a worm gear mesh.
 19. Surface Contact Of Worm And Worm Gear There is no specific Japanese standard concerning worm gearing, except for some specifications regarding surface contact in JIS B 1741. Therefore, it is the general
19. Surface Contact Of Worm And Worm Gear There is no specific Japanese standard concerning worm gearing, except for some specifications regarding surface contact in JIS B 1741. Therefore, it is the general
General gear terms and definitions. Trantorque 48 DP. Steel and Brass
 General gear terms and definitions 317 Spur and Helical Gears: Formulae and definitions Helical Gear Spur Gear Term Definition formulae formulae 318 Spur and Helical Gears: Formulae and definitions Helical
General gear terms and definitions 317 Spur and Helical Gears: Formulae and definitions Helical Gear Spur Gear Term Definition formulae formulae 318 Spur and Helical Gears: Formulae and definitions Helical
GEAR CONTENTS POWER TRANSMISSION GEAR TYPES OF GEARS NOMENCLATURE APPLICATIONS OF GEARS VELOCITY RATIO GEAR TRAINS EXAMPLE PROBLEMS AND QUESTIONS
 GEAR CONTENTS POWER TRANSMISSION GEAR TYPES OF GEARS NOMENCLATURE APPLICATIONS OF GEARS VELOCITY RATIO GEAR TRAINS EXAMPLE PROBLEMS AND QUESTIONS GEAR.. Power transmission is the movement of energy from
GEAR CONTENTS POWER TRANSMISSION GEAR TYPES OF GEARS NOMENCLATURE APPLICATIONS OF GEARS VELOCITY RATIO GEAR TRAINS EXAMPLE PROBLEMS AND QUESTIONS GEAR.. Power transmission is the movement of energy from
TRANSLATION (OR LINEAR)
") 5) Load Bearing Mechanisms Load bearing mechanisms are the structural backbone of any linear / rotary motion system, and are a critical consideration. This section will introduce most of the more common
5) Load Bearing Mechanisms Load bearing mechanisms are the structural backbone of any linear / rotary motion system, and are a critical consideration. This section will introduce most of the more common
Highest Performance: Dyna Series
 Highest Performance: Dyna Series The Dyna Series is our highest performance right-angle gear reducer utilizing sophisticated hypoid gearing. The benefit of hypoid gearing is that it combines the space
Highest Performance: Dyna Series The Dyna Series is our highest performance right-angle gear reducer utilizing sophisticated hypoid gearing. The benefit of hypoid gearing is that it combines the space
Gear Tooth Geometry - This is determined primarily by pitch, depth and pressure angle
 Gear Tooth Geometry - This is determined primarily by pitch, depth and pressure angle Addendum: The radial distance between the top land and the pitch circle. Addendum Circle: The circle defining the outer
Gear Tooth Geometry - This is determined primarily by pitch, depth and pressure angle Addendum: The radial distance between the top land and the pitch circle. Addendum Circle: The circle defining the outer
SECTION 8 BEVEL GEARING
 SECTION 8 BEVEL GEARING For intersecting shafts, bevel gears offer a good means of transmitting motion and power. Most transmissions occur at right angles, Figure 8-1, but the shaft angle can be any value.
SECTION 8 BEVEL GEARING For intersecting shafts, bevel gears offer a good means of transmitting motion and power. Most transmissions occur at right angles, Figure 8-1, but the shaft angle can be any value.
The Available Solution CYCLO DRIVE. Gearmotors & Speed Reducers. Series
 The Available Solution CYCLO DRIVE Gearmotors & Speed Reducers 6000 Series WHAT DO YOU THINK OF THIS? THESE ARE THE ADVANTAGES OF THE NEWEST CYCLO, 6000 SERIES: More frame sizes, gear ratios and motor
The Available Solution CYCLO DRIVE Gearmotors & Speed Reducers 6000 Series WHAT DO YOU THINK OF THIS? THESE ARE THE ADVANTAGES OF THE NEWEST CYCLO, 6000 SERIES: More frame sizes, gear ratios and motor
INVOLUTE SPIRAL FACE COUPLINGS AND GEARS: DESIGN APPROACH AND MANUFACTURING TECHNIQUE
 УДК 621.9.015 Dr. Alexander L. Kapelevich, Stephen D. Korosec 38 INVOLUTE SPIRAL FACE COUPLINGS AND GEARS: DESIGN APPROACH AND MANUFACTURING TECHNIQUE This paper presents spiral face gears with an involute
УДК 621.9.015 Dr. Alexander L. Kapelevich, Stephen D. Korosec 38 INVOLUTE SPIRAL FACE COUPLINGS AND GEARS: DESIGN APPROACH AND MANUFACTURING TECHNIQUE This paper presents spiral face gears with an involute
Effect of Geometry Factor I & J Factor Multipliers in the performance of Helical Gears
 Effect of Geometry Factor I & J Factor Multipliers in the performance of Helical Gears 1 Amit D. Modi, 2 Manan B. Raval, 1 Lecturer, 2 Lecturer, 1 Department of Mechanical Engineering, 2 Department of
Effect of Geometry Factor I & J Factor Multipliers in the performance of Helical Gears 1 Amit D. Modi, 2 Manan B. Raval, 1 Lecturer, 2 Lecturer, 1 Department of Mechanical Engineering, 2 Department of
Bevel Gears. Fig.(1) Bevel gears
 Bevel gears") Bevel Gears Bevel gears are cut on conical blanks to be used to transmit motion between intersecting shafts. The simplest bevel gear type is the straighttooth bevel gear or straight bevel gear as can be
Bevel Gears Bevel gears are cut on conical blanks to be used to transmit motion between intersecting shafts. The simplest bevel gear type is the straighttooth bevel gear or straight bevel gear as can be
MANUFACTURING OF GEAR BOXES
 Profile No.: 29 NIC Code: 29301 MANUFACTURING OF GEAR BOXES 1. INTRODUCTION: Gears play a prominent role in mechanical power transmission. A gear or cogwheel is a rotating machine part having cut teeth,
Profile No.: 29 NIC Code: 29301 MANUFACTURING OF GEAR BOXES 1. INTRODUCTION: Gears play a prominent role in mechanical power transmission. A gear or cogwheel is a rotating machine part having cut teeth,
Highest Precision: Dyna Series
 Highest Precision: Dyna Series GAM can. Just ask! If you don t see exactly what you need, let us know. We can modify the Dyna Series gearboxes to meet your needs. Page 3 provides a list of commonly requested
Highest Precision: Dyna Series GAM can. Just ask! If you don t see exactly what you need, let us know. We can modify the Dyna Series gearboxes to meet your needs. Page 3 provides a list of commonly requested
 DEPARTMENT OF MECHANICAL ENGINEERING Subject code: ME6601 Subject Name: DESIGN OF TRANSMISSION SYSTEMS UNIT-I DESIGN OF TRANSMISSION SYSTEMS FOR FLEXIBLE ELEMENTS 1. What is the effect of centre distance
DEPARTMENT OF MECHANICAL ENGINEERING Subject code: ME6601 Subject Name: DESIGN OF TRANSMISSION SYSTEMS UNIT-I DESIGN OF TRANSMISSION SYSTEMS FOR FLEXIBLE ELEMENTS 1. What is the effect of centre distance
Highest Performance: Dyna Series
 Highest Performance: Dyna Series GAM can. If you don t see exactly what you need, let us know. We can modify the Dyna Series gearboxes to meet your needs. Page provides a list of commonly requested modifications
Highest Performance: Dyna Series GAM can. If you don t see exactly what you need, let us know. We can modify the Dyna Series gearboxes to meet your needs. Page provides a list of commonly requested modifications
Direction of Helix (R) No. of Teeth (20) Module (1) Others (Ground Gear) Type (Helical Gear) Material (SCM440)
 No. of Teeth (20) Module (1) Others (Ground Gear) Type (Helical Gear) Material (SCM440)") KH round Series Newly added m1 ~ 3 Page 168 SH Steel m2, 3 Page 178 CP acks acks Catalog Number of KHK Stock The Catalog Number for KHK stock gears is based on the simple formula listed below. Please order
KH round Series Newly added m1 ~ 3 Page 168 SH Steel m2, 3 Page 178 CP acks acks Catalog Number of KHK Stock The Catalog Number for KHK stock gears is based on the simple formula listed below. Please order
Gear Engineering Data. Spur Gear Gear Formulas Drive Selection Horsepower and Torque Tables
 Engineering Gear Engineering Data Spur Gear Gear Formulas Drive Selection Horsepower and Torque Tables G-79 Gear Selection Stock Spur Gear Drive Selection When designing a stock gear drive using the horsepower
Engineering Gear Engineering Data Spur Gear Gear Formulas Drive Selection Horsepower and Torque Tables G-79 Gear Selection Stock Spur Gear Drive Selection When designing a stock gear drive using the horsepower
Orientalmotor. Development of K II Series Hypoid Geared Motor
 Development of K II Series Hypoid Geared Motor The motor industry was looking for a geared motor that would downsize, reduce loss and provide high torque. This led our company to develop the K II series,
Development of K II Series Hypoid Geared Motor The motor industry was looking for a geared motor that would downsize, reduce loss and provide high torque. This led our company to develop the K II series,
CONTENTS ComboGear Updated 5/17/2016
 MASTER CONTENTS Updated 5/17/2016 Contents Features / Benefits...CG-2 Specification...CG-4 How To Order...CG-4 Nomenclature...CG-4 Easy Selection...CG-5 Selection Using Rating Tables...CG-12 Dimensions...CG-23
MASTER CONTENTS Updated 5/17/2016 Contents Features / Benefits...CG-2 Specification...CG-4 How To Order...CG-4 Nomenclature...CG-4 Easy Selection...CG-5 Selection Using Rating Tables...CG-12 Dimensions...CG-23
PRODUCT OVERVIEW HIGHEST PRECISION
 PRODUCT OVERVIEW If you need high precision gear reducers at a reasonable cost and you value innovation and excellent service, take a close look at our product line. You ll find a wide range of products
PRODUCT OVERVIEW If you need high precision gear reducers at a reasonable cost and you value innovation and excellent service, take a close look at our product line. You ll find a wide range of products
using Class 2-C (Centralizing) tolerances. Jack lift shaft lead tolerance is approximately 0.004" per foot.
 tolerances. Jack lift shaft lead tolerance is approximately 0.004 per foot.") WORM GEAR JACK MODELS WORM GEAR ACTIONJAC JACKS Jack systems are ruggedly designed and produced in standard models with load handling capacities from 1/4 ton to 100 tons. They may be used individually
WORM GEAR JACK MODELS WORM GEAR ACTIONJAC JACKS Jack systems are ruggedly designed and produced in standard models with load handling capacities from 1/4 ton to 100 tons. They may be used individually
Technical Publications Catalog. October 2015
 Technical Publications Catalog October 2015 Table of Contents How to Purchase Documents... 1 Index of AGMA Standards and Information Sheets by Number... 1 Index of AGMA Standards and Information Sheets
Technical Publications Catalog October 2015 Table of Contents How to Purchase Documents... 1 Index of AGMA Standards and Information Sheets by Number... 1 Index of AGMA Standards and Information Sheets
(POWER TRANSMISSION Methods)
") UNIT-5 (POWER TRANSMISSION Methods) It is a method by which you can transfer cyclic motion from one place to another or one pulley to another pulley. The ways by which we can transfer cyclic motion are:-
UNIT-5 (POWER TRANSMISSION Methods) It is a method by which you can transfer cyclic motion from one place to another or one pulley to another pulley. The ways by which we can transfer cyclic motion are:-
Sheet 1 Variable loading
 Sheet 1 Variable loading 1. Estimate S e for the following materials: a. AISI 1020 CD steel. b. AISI 1080 HR steel. c. 2024 T3 aluminum. d. AISI 4340 steel heat-treated to a tensile strength of 1700 MPa.
Sheet 1 Variable loading 1. Estimate S e for the following materials: a. AISI 1020 CD steel. b. AISI 1080 HR steel. c. 2024 T3 aluminum. d. AISI 4340 steel heat-treated to a tensile strength of 1700 MPa.
Catalog Q Conversion For those wishing to ease themselves into working with metric gears
 1.3.4 Conversion For those wishing to ease themselves into working with metric gears by looking at them in terms of familiar inch gearing relationships and mathematics, Table 1-5 is offered as a means
1.3.4 Conversion For those wishing to ease themselves into working with metric gears by looking at them in terms of familiar inch gearing relationships and mathematics, Table 1-5 is offered as a means
Gearheads H-51. Gearheads for AC Motors H-51
 Technical Reference H-51 for AC Since AC motor gearheads are used continuously, primarily for transmitting power, they are designed with priority on ensuring high permissible torque, long life, noise reduction
Technical Reference H-51 for AC Since AC motor gearheads are used continuously, primarily for transmitting power, they are designed with priority on ensuring high permissible torque, long life, noise reduction
How to Build with the Mindstorm Kit
 How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
How to Build with the Mindstorm Kit There are many resources available Constructopedias Example Robots YouTube Etc. The best way to learn, is to do Remember rule #1: don't be afraid to fail New Rule: don't
CONTENTS. Adaptable TIGEAR Right Angle Speed Reducers. Specification... How To Order...
 CONTENTS Right Angle Speed Reducers Features/Benefits... G4--2 Specification... How To Order... G4--4 G4--5 Nomenclature Easy Selection...... G4--5 G4--6 Selection/Dimensions... Mounting Positions... G4--10
CONTENTS Right Angle Speed Reducers Features/Benefits... G4--2 Specification... How To Order... G4--4 G4--5 Nomenclature Easy Selection...... G4--5 G4--6 Selection/Dimensions... Mounting Positions... G4--10
HYBRID LINEAR ACTUATORS BASICS
 HYBRID LINEAR ACTUATORS BASICS TECHNICAL OVERVIEW Converting the rotary motion of a stepping motor into linear motion can be accomplished by several mechanical means, including rack and pinion, belts and
HYBRID LINEAR ACTUATORS BASICS TECHNICAL OVERVIEW Converting the rotary motion of a stepping motor into linear motion can be accomplished by several mechanical means, including rack and pinion, belts and
Technical Publications Catalog. April 2014
 Technical Publications Catalog April 2014 Table of Contents American Gear Manufacturers Association... iii How to Purchase Documents... 1 Index of AGMA Standards and Information Sheets by Number... 1 Index
Technical Publications Catalog April 2014 Table of Contents American Gear Manufacturers Association... iii How to Purchase Documents... 1 Index of AGMA Standards and Information Sheets by Number... 1 Index
GEARBOXES. Gearboxes. Gearboxes. Gearbox is a mechanical device utilized to increase the output torque or change
 GEARBOXES Gearboxes Gearboxes Gearbox is a mechanical device utilized to increase the output torque or change the speed of a motor. The motor's shaft is attached to one end of the gearbox and through the
GEARBOXES Gearboxes Gearboxes Gearbox is a mechanical device utilized to increase the output torque or change the speed of a motor. The motor's shaft is attached to one end of the gearbox and through the
Part VII: Gear Systems: Analysis
 Part VII: Gear Systems: Analysis This section will review standard gear systems and will provide the basic tools to perform analysis on these systems. The areas covered in this section are: 1) Gears 101:
Part VII: Gear Systems: Analysis This section will review standard gear systems and will provide the basic tools to perform analysis on these systems. The areas covered in this section are: 1) Gears 101:
Introduction. Kinematics and Dynamics of Machines. Involute profile. 7. Gears
 Introduction The kinematic function of gears is to transfer rotational motion from one shaft to another Kinematics and Dynamics of Machines 7. Gears Since these shafts may be parallel, perpendicular, or
Introduction The kinematic function of gears is to transfer rotational motion from one shaft to another Kinematics and Dynamics of Machines 7. Gears Since these shafts may be parallel, perpendicular, or
Helical Gears. Section Contents
 Section Contents CATALOG NUMER / DIMENSIONS... 64-65 SELECTION PROCEDURE... 66 HORSEPOWER & TORQUE RATINGS... 67-68 STOCK ALTERED / CUSTOM HELICAL GEARS... 3-5 HELICAL GEAR ENGINEERING INFORMATION... 308-314
Section Contents CATALOG NUMER / DIMENSIONS... 64-65 SELECTION PROCEDURE... 66 HORSEPOWER & TORQUE RATINGS... 67-68 STOCK ALTERED / CUSTOM HELICAL GEARS... 3-5 HELICAL GEAR ENGINEERING INFORMATION... 308-314
Introduction to Gear Design
 Introduction to Gear Design Course No: M03-016 Credit: 3 PDH Robert P. Tata, P.E. Continuing Education and Development, Inc. 9 Greyridge Farm Court Stony Point, NY 10980 P: (877) 322-5800 F: (877) 322-4774
Introduction to Gear Design Course No: M03-016 Credit: 3 PDH Robert P. Tata, P.E. Continuing Education and Development, Inc. 9 Greyridge Farm Court Stony Point, NY 10980 P: (877) 322-5800 F: (877) 322-4774
Program Enclosed Cylindrical-Wormgear Speed Reducers and Gearmotors Introduction
 Program 60-546 Enclosed Cylindrical-Wormgear Speed Reducers and Gearmotors Introduction This model covers the design and durability rating of enclosed cylindrical worm gear speed reducers of the following
Program 60-546 Enclosed Cylindrical-Wormgear Speed Reducers and Gearmotors Introduction This model covers the design and durability rating of enclosed cylindrical worm gear speed reducers of the following
12/6/2013 9:09 PM. Chapter 13. Gears General. Dr. Mohammad Suliman Abuhaiba, PE
 Chapter 13 Gears General 1 2 Chapter Outline 1. Types of Gears 2. Nomenclature 3. Conjugate Action 4. Involute Properties 5. Fundamentals 6. Contact Ratio 7. Interference 8. The Forming of Gear Teeth 9.
Chapter 13 Gears General 1 2 Chapter Outline 1. Types of Gears 2. Nomenclature 3. Conjugate Action 4. Involute Properties 5. Fundamentals 6. Contact Ratio 7. Interference 8. The Forming of Gear Teeth 9.
Lecture (7) on. Gear Measurement. By Dr. Emad M. Saad. Industrial Engineering Dept. Faculty of Engineering. Fayoum University.
 on. Gear Measurement. By Dr. Emad M. Saad. Industrial Engineering Dept. Faculty of Engineering. Fayoum University.") 1 Lecture (7) on Gear Measurement Fayoum University By Dr. Emad M. Saad Industrial Engineering Dept. Faculty of Engineering Fayoum University Faculty of Engineering Industrial Engineering Dept. 2015-2016
1 Lecture (7) on Gear Measurement Fayoum University By Dr. Emad M. Saad Industrial Engineering Dept. Faculty of Engineering Fayoum University Faculty of Engineering Industrial Engineering Dept. 2015-2016
Power Transmission Elements II: Gears and Bearings. Lecture 3, Week 4
 Power Transmission Elements II: Gears and Bearings Lecture 3, Week 4 Announcements Lab 4 need to finish by Friday Friday lab can get started today Project proposal Due at 23:59 tonight Email to us: matthewg@mit.edu,
Power Transmission Elements II: Gears and Bearings Lecture 3, Week 4 Announcements Lab 4 need to finish by Friday Friday lab can get started today Project proposal Due at 23:59 tonight Email to us: matthewg@mit.edu,
INTRODUCTION TO INDUSTRIAL GEARS AND THEIR LUBRICATION
 INTRODUCTION TO INDUSTRIAL GEARS AND THEIR LUBRICATION. Types of gears From a lubrication perspective, gears can be considered under three classes: () spur, helical, herringbone, straight-bevel and spiral
INTRODUCTION TO INDUSTRIAL GEARS AND THEIR LUBRICATION. Types of gears From a lubrication perspective, gears can be considered under three classes: () spur, helical, herringbone, straight-bevel and spiral
Chapter 3. Transmission Components
 Chapter 3. Transmission Components The difference between machine design and structure design An important design problem in a mechanical system is how to transmit and convert power to achieve required
Chapter 3. Transmission Components The difference between machine design and structure design An important design problem in a mechanical system is how to transmit and convert power to achieve required
HARMONIC GEARHEAD. Features & Benefits Specifications... 53
 HARMOIC GEARHEAD exen s revolutionary (HG) is the perfect combination of size and precision. Use the integrated with exen s RPS Pinion (HGP) to create a true backlash-free solution from the motor to the
HARMOIC GEARHEAD exen s revolutionary (HG) is the perfect combination of size and precision. Use the integrated with exen s RPS Pinion (HGP) to create a true backlash-free solution from the motor to the
Chapter seven. Gears. Laith Batarseh
 Chapter seven Gears Laith Batarseh Gears are very important in power transmission between a drive rotor and driven rotor What are the functions of gears? - Transmit motion and torque (power) between shafts
Chapter seven Gears Laith Batarseh Gears are very important in power transmission between a drive rotor and driven rotor What are the functions of gears? - Transmit motion and torque (power) between shafts
1/2/2015 2:04 PM. Chapter 13. Gears General. Dr. Mohammad Suliman Abuhaiba, PE
 Chapter 13 Gears General 1 2 Chapter Outline 1. Types of Gears 2. Nomenclature 3. Conjugate Action 4. Involute Properties 5. Fundamentals 6. Contact Ratio 7. Interference 8. The Forming of Gear Teeth 9.
Chapter 13 Gears General 1 2 Chapter Outline 1. Types of Gears 2. Nomenclature 3. Conjugate Action 4. Involute Properties 5. Fundamentals 6. Contact Ratio 7. Interference 8. The Forming of Gear Teeth 9.
The development of a differential for the improvement of traction control
 The development of a differential for the improvement of traction control S E CHOCHOLEK, BSME Gleason Corporation, Rochester, New York, United States of America SYNOPSIS: An introduction to the function
The development of a differential for the improvement of traction control S E CHOCHOLEK, BSME Gleason Corporation, Rochester, New York, United States of America SYNOPSIS: An introduction to the function
Stainless Steel Couplings, Universal Joints & Shaft Accessories
 Stainless Steel Couplings, Universal Joints & Shaft Accessories E SSFC Series - Insert (3 Jaw) Type Coupling 316 stainless steel with passivated finish Precision machined bore or solid hubs Three types
Stainless Steel Couplings, Universal Joints & Shaft Accessories E SSFC Series - Insert (3 Jaw) Type Coupling 316 stainless steel with passivated finish Precision machined bore or solid hubs Three types
Technical Features. 20 Thompson Rd East Windsor CT Fax
 Technical Features 20 Thompson Rd East Windsor CT 06088 1.800.249.5662 860.623.4132 Fax www.komaprecision.com info@komaprecision.com THE TSUDAKOMA DUAL LEAD GEARING SYSTEM THE TSUDAKOMA DUAL LEAD GEARING
Technical Features 20 Thompson Rd East Windsor CT 06088 1.800.249.5662 860.623.4132 Fax www.komaprecision.com info@komaprecision.com THE TSUDAKOMA DUAL LEAD GEARING SYSTEM THE TSUDAKOMA DUAL LEAD GEARING
TE 73 TWO ROLLER MACHINE
 TE 73 TWO ROLLER MACHINE Background The TE 73 family of machines dates back to original Plint and Partners Ltd designs from the 1960s. These machines are all to the overhung roller design in which test
TE 73 TWO ROLLER MACHINE Background The TE 73 family of machines dates back to original Plint and Partners Ltd designs from the 1960s. These machines are all to the overhung roller design in which test
Hub City Spartan Aluminum Worm Gear Drives
 Spartan Aluminum Worm Gear Features C-2 Selection Instructions C-3 Descriptions C-4 Single Reduction Ratings C-5 Single Reduction Dimensions C-6 to C-7 Double Reduction Worm-Worm Ratings C-8 Double Reduction
Spartan Aluminum Worm Gear Features C-2 Selection Instructions C-3 Descriptions C-4 Single Reduction Ratings C-5 Single Reduction Dimensions C-6 to C-7 Double Reduction Worm-Worm Ratings C-8 Double Reduction
Technical Publications Catalog. October 2016
 Technical Publications Catalog October 2016 Table of Contents How to Purchase Documents... 1 Index of AGMA Standards and Information Sheets by Number... 1 Index of AGMA Standards and Information Sheets
Technical Publications Catalog October 2016 Table of Contents How to Purchase Documents... 1 Index of AGMA Standards and Information Sheets by Number... 1 Index of AGMA Standards and Information Sheets
Analysis of Torsional Vibration in Elliptical Gears
 The The rd rd International Conference on on Design Engineering and Science, ICDES Pilsen, Czech Pilsen, Republic, Czech August Republic, September -, Analysis of Torsional Vibration in Elliptical Gears
The The rd rd International Conference on on Design Engineering and Science, ICDES Pilsen, Czech Pilsen, Republic, Czech August Republic, September -, Analysis of Torsional Vibration in Elliptical Gears
Hub City Spartan Aluminum Worm Gear Drives
 Spartan Aluminum Worm Gear Features C-2 Selection Instructions C-3 Descriptions C-4 Single Reduction Ratings C-5 Single Reduction Dimensions C-6 to C-7 Double Reduction Worm-Worm Ratings C-8 Double Reduction
Spartan Aluminum Worm Gear Features C-2 Selection Instructions C-3 Descriptions C-4 Single Reduction Ratings C-5 Single Reduction Dimensions C-6 to C-7 Double Reduction Worm-Worm Ratings C-8 Double Reduction
Tooth thickness Dedendum. Addendum. Centre distance Nominal
 FORMULAS SPUR GEARS TO FIND:- PCD ØD MODULE No. of TEETH CP ADDENDUM DEDENDUM MODULE No. of TEETH x MOD (mm) (No. of TEETH + ) x MOD (mm) 5.4 MODULE CP π (mm) PCD MODULE (mm) MODULE x π (mm) MODULE (mm)
FORMULAS SPUR GEARS TO FIND:- PCD ØD MODULE No. of TEETH CP ADDENDUM DEDENDUM MODULE No. of TEETH x MOD (mm) (No. of TEETH + ) x MOD (mm) 5.4 MODULE CP π (mm) PCD MODULE (mm) MODULE x π (mm) MODULE (mm)
Application Notes. Calculating Mechanical Power Requirements. P rot = T x W
 Application Notes Motor Calculations Calculating Mechanical Power Requirements Torque - Speed Curves Numerical Calculation Sample Calculation Thermal Calculations Motor Data Sheet Analysis Search Site
Application Notes Motor Calculations Calculating Mechanical Power Requirements Torque - Speed Curves Numerical Calculation Sample Calculation Thermal Calculations Motor Data Sheet Analysis Search Site
Chapter 8 Kinematics of Gears
 Chapter 8 Kinematics of Gears Gears! Gears are most often used in transmissions to convert an electric motor s high speed and low torque to a shaft s requirements for low speed high torque: Speed is easy
Chapter 8 Kinematics of Gears Gears! Gears are most often used in transmissions to convert an electric motor s high speed and low torque to a shaft s requirements for low speed high torque: Speed is easy
F-39. Technical Reference
 Gearheads Role of the Gearhead The role of a gearhead is closely related to motor development. Originally, when the AC motor was a simple rotating device, the gearhead was mainly used to change the motor
Gearheads Role of the Gearhead The role of a gearhead is closely related to motor development. Originally, when the AC motor was a simple rotating device, the gearhead was mainly used to change the motor
GEAR GENERATION GEAR FORMING. Vipin K. Sharma
 GEAR GENERATION GEAR FORMING 1 GEAR MANUFACTURING Manufacturing of gears needs several processing operations in sequential stages depending upon the material and type of the gears and quality desired.
GEAR GENERATION GEAR FORMING 1 GEAR MANUFACTURING Manufacturing of gears needs several processing operations in sequential stages depending upon the material and type of the gears and quality desired.
Riverhawk Company 215 Clinton Road New Hartford NY (315) Free-Flex Flexural Pivot Engineering Data
 Free-Flex Flexural Pivot Engineering Data") Riverhawk Company 215 Clinton Road New Hartford NY (315)768-4937 Free-Flex Flexural Pivot Engineering Data PREFACE Patented Flexural Pivot A unique bearing concept for applications with limited angular
Riverhawk Company 215 Clinton Road New Hartford NY (315)768-4937 Free-Flex Flexural Pivot Engineering Data PREFACE Patented Flexural Pivot A unique bearing concept for applications with limited angular
SHAFT ALIGNMENT FORWARD
 Service Application Manual SAM Chapter 630-76 Section 24 SHAFT ALIGNMENT FORWARD One of the basic problems of any installation is aligning couplings or shafts. Therefore, this section will endeavor to
Service Application Manual SAM Chapter 630-76 Section 24 SHAFT ALIGNMENT FORWARD One of the basic problems of any installation is aligning couplings or shafts. Therefore, this section will endeavor to
What are the functions of gears? What is gear?
 8//0 hapter seven Laith atarseh are very important in power transmission between a drive rotor and driven rotor What are the functions of gears? - Transmit motion and torque (power) between shafts - Maintain
8//0 hapter seven Laith atarseh are very important in power transmission between a drive rotor and driven rotor What are the functions of gears? - Transmit motion and torque (power) between shafts - Maintain
Ernie Reiter and Irving Laskin
 F I N E P I T C H, P L A S T I C FA C E G E A R S : Design Ernie Reiter and Irving Laskin Ernie Reiter is a consultant specializing in the design of gears and geared products. He has authored modern software
F I N E P I T C H, P L A S T I C FA C E G E A R S : Design Ernie Reiter and Irving Laskin Ernie Reiter is a consultant specializing in the design of gears and geared products. He has authored modern software
Engineering Information
 Engineering nformation Gear Nomenclature ADDENDUM (a) is the height by which a tooth projects beyond the pitch circle or pitch line. BASE DAMETER (D b ) is the diameter of the base cylinder from which
Engineering nformation Gear Nomenclature ADDENDUM (a) is the height by which a tooth projects beyond the pitch circle or pitch line. BASE DAMETER (D b ) is the diameter of the base cylinder from which
Kaydon white paper. Slewing bearing selection, simplified. an SKF Group brand. by Jeff Lauber, engineering specialist
 Slewing bearing selection, simplified by Jeff Lauber, engineering specialist an SKF Group brand Selecting the right slewing bearing Slewing bearings are typically used in applications where their ability
Slewing bearing selection, simplified by Jeff Lauber, engineering specialist an SKF Group brand Selecting the right slewing bearing Slewing bearings are typically used in applications where their ability
Friction Management Solutions for Industrial Gear Drives
 Friction Management Solutions for Industrial Gear Drives A complete range of bearings and complementary services help the gear drive industry to meet ever-increasing requirements in product reliability
Friction Management Solutions for Industrial Gear Drives A complete range of bearings and complementary services help the gear drive industry to meet ever-increasing requirements in product reliability
PR HOFFMAN MACHINE PRODUCTS
 PR HOFFMAN MACHINE PRODUCTS Innovations in Flatness 117 COMMERCE AVENUE, CARLISLE, PA, USA 1701 TEL: 1 717-243-9900 FAX: 1 717-243-442 WWW.PRHOFFMAN.COM Machines Overview PR Hoffman Machines: Industry
PR HOFFMAN MACHINE PRODUCTS Innovations in Flatness 117 COMMERCE AVENUE, CARLISLE, PA, USA 1701 TEL: 1 717-243-9900 FAX: 1 717-243-442 WWW.PRHOFFMAN.COM Machines Overview PR Hoffman Machines: Industry
Shifting gears: simplify your design with slewing ring bearings
 White Paper Shifting gears: simplify your design with slewing ring bearings Scott Hansen, VP, Manufacturing Planning, Kaydon Bearings, an SKF Group company A slewing ring bearing has rolling elements designed
White Paper Shifting gears: simplify your design with slewing ring bearings Scott Hansen, VP, Manufacturing Planning, Kaydon Bearings, an SKF Group company A slewing ring bearing has rolling elements designed
GatesFacts Technical Information Library Gates Compass Power Transmission CD-ROM version 1.2 The Gates Rubber Company Denver, Colorado USA
 SIZING UP V-RIBBED BELTS Gary Porter Machine Design October 22, 1992 V-ribbed belts offer several advantages to power transmission drive design. Classical V-belts have a profile shaped like a modified
SIZING UP V-RIBBED BELTS Gary Porter Machine Design October 22, 1992 V-ribbed belts offer several advantages to power transmission drive design. Classical V-belts have a profile shaped like a modified
Ball Rail Systems RE / The Drive & Control Company
 Ball Rail Systems RE 82 202/2002-12 The Drive & Control Company Rexroth Linear Motion Technology Ball Rail Systems Roller Rail Systems Standard Ball Rail Systems Super Ball Rail Systems Ball Rail Systems
Ball Rail Systems RE 82 202/2002-12 The Drive & Control Company Rexroth Linear Motion Technology Ball Rail Systems Roller Rail Systems Standard Ball Rail Systems Super Ball Rail Systems Ball Rail Systems
Thermal Analysis of Helical and Spiral Gear Train
 International Journal for Ignited Minds (IJIMIINDS) Thermal Analysis of Helical and Spiral Gear Train Dr. D V Ghewade a, S S Nagarale b & A N Pandav c a Principal, Department of Mechanical, GENESIS, Top-Kolhapur,
International Journal for Ignited Minds (IJIMIINDS) Thermal Analysis of Helical and Spiral Gear Train Dr. D V Ghewade a, S S Nagarale b & A N Pandav c a Principal, Department of Mechanical, GENESIS, Top-Kolhapur,
Instantaneous Centre Method
 Instantaneous Centre Method The combined motion of rotation and translation of the link AB may be assumed to be a motion of pure rotation about some centre I, known as the instantaneous centre of rotation.
Instantaneous Centre Method The combined motion of rotation and translation of the link AB may be assumed to be a motion of pure rotation about some centre I, known as the instantaneous centre of rotation.
Candy Coup-Link OVER YEARS OF INNOVATION
 Candy Coup-Link Zero-backlash, flexible-shaft couplings High torque, excellent response Accommodates misalignment and shaft endplay Aluminum and stainless steel options Inch and metric bores available
Candy Coup-Link Zero-backlash, flexible-shaft couplings High torque, excellent response Accommodates misalignment and shaft endplay Aluminum and stainless steel options Inch and metric bores available
Chain Drives. Pitch. Basic Types -There are six major types of power-
 1 2 Power transmission chains have two things in common; side bars or link plates, and pin and bushing joints. The chain articulates at each joint to operate around a toothed sprocket. The pitch of the
1 2 Power transmission chains have two things in common; side bars or link plates, and pin and bushing joints. The chain articulates at each joint to operate around a toothed sprocket. The pitch of the
APG Updated APG
 MASTER CONTENTS Updated 5-24-2017 Contents Features / Benefits...-2 Specification...-4 How To Order...-4 Nomenclature...-6 Selection Gearmotors... -7 C-Face and Separate Reducers... -25 Dimensions Gearmotors...
MASTER CONTENTS Updated 5-24-2017 Contents Features / Benefits...-2 Specification...-4 How To Order...-4 Nomenclature...-6 Selection Gearmotors... -7 C-Face and Separate Reducers... -25 Dimensions Gearmotors...
Advantages of a Magnetically Driven Gear Pump By Steven E. Owen, P.E.
 Advantages of a Magnetically Driven Gear Pump By Steven E. Owen, P.E. Introduction Before considering a magnetically driven pump for use in a fluid system, it is best to know something about the technology
Advantages of a Magnetically Driven Gear Pump By Steven E. Owen, P.E. Introduction Before considering a magnetically driven pump for use in a fluid system, it is best to know something about the technology
Metrology Prof. Dr Kanakuppi Sadashivappa Bapuji Institute of Engineering and Technology Davangere. Lecture 25 Introduction of Gears
 Metrology Prof. Dr Kanakuppi Sadashivappa Bapuji Institute of Engineering and Technology Davangere Lecture 25 Introduction of Gears I welcome you for the series of lecture on gear measurement and at module
Metrology Prof. Dr Kanakuppi Sadashivappa Bapuji Institute of Engineering and Technology Davangere Lecture 25 Introduction of Gears I welcome you for the series of lecture on gear measurement and at module
Polymers Outperform Metals In Precision Gearing
 WHITE PAPER Power of knowledge engineering Polymers Outperform Metals In Precision Gearing Some of the most innovative gears today are not made from metal or injection-molded plastics but from machined
WHITE PAPER Power of knowledge engineering Polymers Outperform Metals In Precision Gearing Some of the most innovative gears today are not made from metal or injection-molded plastics but from machined
Program Internal Gear Set Profile Shift Coefficients With Zero Backlash Introduction
 Program 60-107 Internal Gear Set Profile Shift Coefficients With Zero Backlash Introduction The purpose of this model is to provide data for a gear set when the tooth thickness and/or the center distance
Program 60-107 Internal Gear Set Profile Shift Coefficients With Zero Backlash Introduction The purpose of this model is to provide data for a gear set when the tooth thickness and/or the center distance
Static And Modal Analysis of Tractor Power Take Off (PTO) Gearbox Housing
 Gearbox Housing") Static And Modal Analysis of Tractor Power Take Off (PTO) Gearbox Housing Gopali S Lamani 1, Prof: S.R.Basavaraddi 2, Assistant Professor, Department of Mechanical Engineering, JSPM NTC RSSOER,India1 Professor,
Static And Modal Analysis of Tractor Power Take Off (PTO) Gearbox Housing Gopali S Lamani 1, Prof: S.R.Basavaraddi 2, Assistant Professor, Department of Mechanical Engineering, JSPM NTC RSSOER,India1 Professor,
Highly Efficient, Grease Lubricated, Compact Design. Hypoid gearing delivers efficiencies up to 85% and smooth, quiet operation
 Highly Efficient, Grease Lubricated, Compact Design Grease lubricated design is maintenance free, requires no oil changes and is up to 85% efficient across all ratios Hypoid gearing delivers efficiencies
Highly Efficient, Grease Lubricated, Compact Design Grease lubricated design is maintenance free, requires no oil changes and is up to 85% efficient across all ratios Hypoid gearing delivers efficiencies
EXAMPLES GEARS. page 1
 (EXAMPLES GEARS) EXAMPLES GEARS Example 1: Shilds p. 76 A 20 full depth spur pinion is to trans mit 1.25 kw at 850 rpm. The pinion has 18 teeth. Determine the Lewis bending stress if the module is 2 and
(EXAMPLES GEARS) EXAMPLES GEARS Example 1: Shilds p. 76 A 20 full depth spur pinion is to trans mit 1.25 kw at 850 rpm. The pinion has 18 teeth. Determine the Lewis bending stress if the module is 2 and
Chapter 11. Keys, Couplings and Seals. Keys. Parallel Keys
 Chapter 11 Keys, Couplings and Seals Material taken for Keys A key is a machinery component that provides a torque transmitting link between two power-transmitting elements. The most common types of keys
Chapter 11 Keys, Couplings and Seals Material taken for Keys A key is a machinery component that provides a torque transmitting link between two power-transmitting elements. The most common types of keys
CH#13 Gears-General. Drive and Driven Gears 3/13/2018
 CH#13 Gears-General A toothed wheel that engages another toothed mechanism in order to change the speed or direction of transmitted motion The gear set transmits rotary motion and force. Gears are used
CH#13 Gears-General A toothed wheel that engages another toothed mechanism in order to change the speed or direction of transmitted motion The gear set transmits rotary motion and force. Gears are used
1.6 Features of common gears
 1.6 Features of common gears Chapter 1.2 covered briefly on types of gear. The main gear features are explained here. Helical gear Helical gear has characteristics of transferability of larger load, less
1.6 Features of common gears Chapter 1.2 covered briefly on types of gear. The main gear features are explained here. Helical gear Helical gear has characteristics of transferability of larger load, less
CHAPTER 5 PREVENTION OF TOOTH DAMAGE IN HELICAL GEAR BY PROFILE MODIFICATION
 90 CHAPTER 5 PREVENTION OF TOOTH DAMAGE IN HELICAL GEAR BY PROFILE MODIFICATION 5.1 INTRODUCTION In any gear drive the absolute and the relative transmission error variations normally increases with an
90 CHAPTER 5 PREVENTION OF TOOTH DAMAGE IN HELICAL GEAR BY PROFILE MODIFICATION 5.1 INTRODUCTION In any gear drive the absolute and the relative transmission error variations normally increases with an
MECH 1200 Quiz 2 Review
 Name: Class: Date: MECH 1200 Quiz 2 Review True/False Indicate whether the statement is true or false. 1. Gears are machined toothed wheels that engage other toothed wheels to transfer power and torque.
Name: Class: Date: MECH 1200 Quiz 2 Review True/False Indicate whether the statement is true or false. 1. Gears are machined toothed wheels that engage other toothed wheels to transfer power and torque.
SHAFT MOUNT REDUCERS. For Additional Models of Shaft Mount Reducers See Sections F & J G-1
 SHAFT MOUNT REDUCERS PowerTorque Features and Description... -2 Nomenclature... -4 Selection Instructions... -5 Selection By Horsepower... -7 Mechanical Ratings... -12 Dimensions... -14 Accessories...
SHAFT MOUNT REDUCERS PowerTorque Features and Description... -2 Nomenclature... -4 Selection Instructions... -5 Selection By Horsepower... -7 Mechanical Ratings... -12 Dimensions... -14 Accessories...
How to Achieve a Successful Molded Gear Transmission
 How to Achieve a Successful Molded Gear Transmission Rod Kleiss Figure 1 A molding insert tool alongside the molded gear and the gear cavitiy. Molded plastic gears have very little in common with machined
How to Achieve a Successful Molded Gear Transmission Rod Kleiss Figure 1 A molding insert tool alongside the molded gear and the gear cavitiy. Molded plastic gears have very little in common with machined
PE Planetary Gearheads
 Planetary Gearheads Unparalleled: This planetary gearbox maintains its maximum efficiency even at the highest speeds Planetary Gearheads are notably light and extremely powerful, yet suitable for complex
Planetary Gearheads Unparalleled: This planetary gearbox maintains its maximum efficiency even at the highest speeds Planetary Gearheads are notably light and extremely powerful, yet suitable for complex
Tribology Aspects in Angular Transmission Systems
 Tribology Aspects in Angular Transmission Systems Part II Straight Bevel Gears Dr. Hermann Stadtfeld (This is the second of an eight-part series on the tribology aspects of angular gear drives. Each article
Tribology Aspects in Angular Transmission Systems Part II Straight Bevel Gears Dr. Hermann Stadtfeld (This is the second of an eight-part series on the tribology aspects of angular gear drives. Each article
Synthetic Gear Oil Selection Dennis Lauer
 Synthetic Gear Oil Selection Dennis Lauer Synthetic gear oils are used whenever mineral gear oils have reached their performance limit and can no longer meet the application requirements; for example,
Synthetic Gear Oil Selection Dennis Lauer Synthetic gear oils are used whenever mineral gear oils have reached their performance limit and can no longer meet the application requirements; for example,
EJP SERIES Right-angle Worm
 EJP SERIES T he EJP series is ideal for demanding applications requiring high efficiency, torsional rigidity and zero backlash. It s lightweight, black anodized aluminum housing and dual input/output seals
EJP SERIES T he EJP series is ideal for demanding applications requiring high efficiency, torsional rigidity and zero backlash. It s lightweight, black anodized aluminum housing and dual input/output seals