Soft Robotics Variable Stiffness Exo-Musculature, One-To-Many Concept, and Advanced Clutches
|
|
|
- Dorthy Shaw
- 5 years ago
- Views:
Transcription
1 ICRA 2012 WORKSHOP: Variable Stiffness Actuators moving the Robots of Tomorrow Soft Robotics Variable Stiffness Exo-Musculature, One-To-Many Concept, and Advanced Clutches Thane R. Hunt, Christopher J. Berthelette, Germano S. Iannacchione, Stephan Koehler, and Marko B. Popovic in collaboration with Adam L. Blumenau and Alec A. Ishak Worcester Polytechnic Institute (WPI)
2 Outline Introducing Exo-musculatures Novel Actuation Mechanisms: One-to-many Motivation (limitations of conventional approaches) Architecture Demonstration of clutch mechanism that could provide: Variable stiffness Elastic potential energy storage
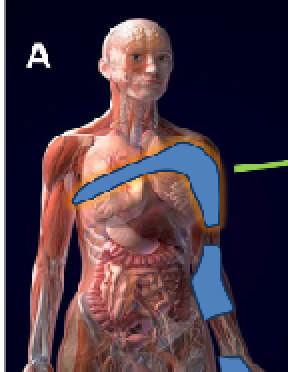

3 Soft-Robotics Exo-Musculature (SRE)

4 Soft-Robotics Exo-Musculature Actuation Package Transmission Sensing Control

5 Minimum Cable Tension Soft-Robotics Exo-Musculature Minimum Force on Joint Minimize the overall cable tension Minimize the forces applied into the shoulder joint that result in no torque The mean distance from the greater tubercle to the proximal and distal insertion of the deltoid muscle in humans is m and m respectively (Morgan 2006) Example of learning on human biomechanics from robotics!
6 Soft-Robotics Exo-Musculature Can be successfully actuated with biologically-realistic forces counteracting gravity Arm angular position can be accurately estimated with inexpensive sensors Control time delays are smaller than biological ones Adaptive control system can successfully address anatomical variations and misalignments Human Arm following a randomly moving target: Effective Response Time for experimental subjects MP (single trial, short break and 3 connected trials) and IG (4 connected trials). *Joint work with collaborators at Harvard University and UPM
 attached to a mannequin arm with added weights tele-operated by Professor")
7 Soft-Robotics Exo-Musculature Demo with one of the first Exo-Musculature prototypes (Dec 2011) for post-stroke rehabilitation Shoulder brace (right) attached to a mannequin arm with added weights tele-operated by Professor Popovic.

8 Soft-Robotics Exo-Musculature To mimic human musculature requires a very large number of independently actuated degrees of freedom. About 400 skeletal muscles in the body each one contains 100 or more motor units
9 Motivation for One-To-Many approach To create a fully mobile, wearable system: Achieve Fine and Variable Stiffness in biologically-inspired fashion Low weight Cost effective Minimize number of electric motors Maximize number of independently actuated motor units Emulate Human Dexterity OTM I Electric Motor Independent Motor Units
10 The One-To-Many Control Results: Variable Stiffness Simple Arm Model: pair of antagonistic muscles. The static experiment: Arm trajectory with varied number of recruited muscle motor units.


11 Benefits of an Electromechanical System The Exo-Musculature s artificial muscles are electromechanically actuated. For applications requiring full mobility, this is more suitable than pneumatic or hydraulic actuators. An average human weighing 82 kg walking at 6.44 km/h burns approximately 384 nutritional calories (1.61 MJ) per hour. Practical achievable energy density at the motor shaft for a pneumatic system is about kj/kg. The mass of the compressed air system required for one hour of walking using a whole body exoskeleton system with same cost of transport as a human is kg. A lithium battery has an energy density of 1.3 MJ/kg Same energy output over a Air Tanks given time Lithium Polymer Battery (23 kg) (1 kg)
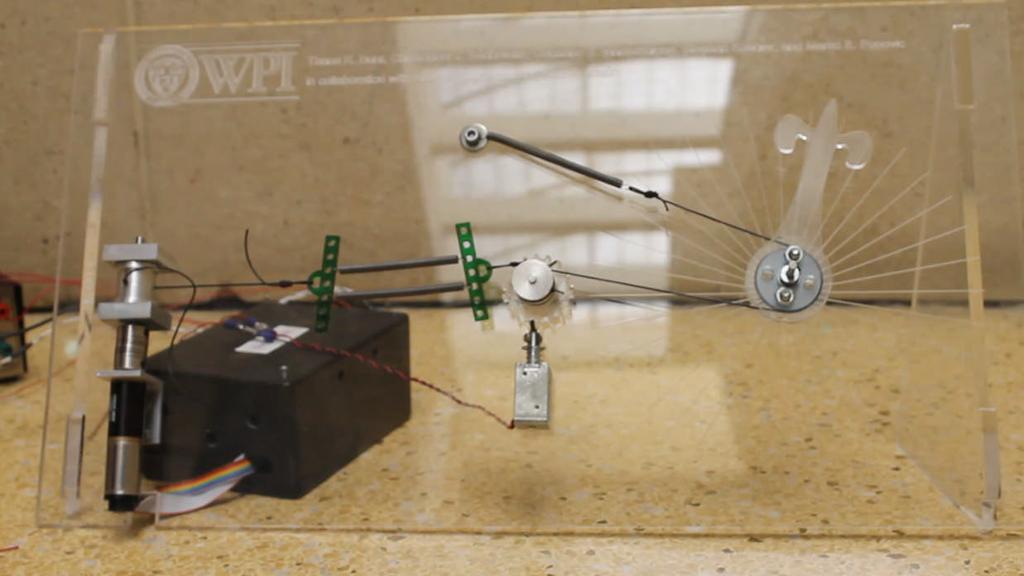
12 The One-To-Many (OTM) Approach

13 Example of the One-To-Many motor unit The single motor unit consists of 3 clutches (C1, C2, C3), 2 elastic elements (E1, E2) and 1 roller R3 that takes a muscle fiber slack. Also shown are rollers R1 and R2 that are shared by many motor units from same or different muscles.
14 The One-To-Many Clutches Desired clutch specifications: low-power light weight high-speed energy efficient robust provides position sensing can be easily miniaturized inexpensive can be easily integrated to Exo-Musculature

 (C) (D) (E) (A) clutch")




15 From Soft Robotics Exo-Musculature to One-To-Many Clutches (B) (A) (C) (D) (E) (A) clutch utilizing forked-roller mechanism with small stopper, (B) clutch utilizing claw/gear mechanism, (C) clutch utilizing sliding-gate mechanism, (D) electromagnetic linear clutch utilizing rollers, and (E) electromagnetic slider clutch.


16 Current Clutch T2 T1 X V Consists of a DC latching solenoid and a toothed-pulley. The clutch only requires power to change states. Once state is engaged, force is held passively without energy input.



17 Current System
18 Demonstration

19 Thank you!
Linear One-to-Many (OTM) system
 system") Linear One-to-Many (OTM) system Many degrees of freedom independently actuated by one electric motor Thane R. Hunt 1, Christopher J. Berthelette 1,2, and Marko B. Popovic 1,3,4 1 Robotics Engineering Program
Linear One-to-Many (OTM) system Many degrees of freedom independently actuated by one electric motor Thane R. Hunt 1, Christopher J. Berthelette 1,2, and Marko B. Popovic 1,3,4 1 Robotics Engineering Program
Soft Actuation for Humanoids
 Soft Actuation for Humanoids Nikos Tsagarakis Humanoid & Human Centred Mechatronics Lab Dept. of Advanced Robotics Istituto Italiano di Tecnologia (IIT) 7th Workshop on Humanoid Soccer Robots IEEE Ihumanoids
Soft Actuation for Humanoids Nikos Tsagarakis Humanoid & Human Centred Mechatronics Lab Dept. of Advanced Robotics Istituto Italiano di Tecnologia (IIT) 7th Workshop on Humanoid Soccer Robots IEEE Ihumanoids
A Simple and Scalable Force Actuator
 A Simple and Scalable Force Actuator Eduardo Torres-Jara and Jessica Banks Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 200 Technology Square, Cambridge,
A Simple and Scalable Force Actuator Eduardo Torres-Jara and Jessica Banks Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 200 Technology Square, Cambridge,
THE APPLICATION OF SERIES ELASTIC ACTUATORS IN THE HYDRAULIC ANKLE-FOOT ORTHOSIS
 Proceedings of the 2018 Design of Medical Devices Conference DMD2018 April 9-12, 2018, Minneapolis, MN, USA DMD2018-6822 THE APPLICATION OF SERIES ELASTIC ACTUATORS IN THE HYDRAULIC ANKLE-FOOT ORTHOSIS
Proceedings of the 2018 Design of Medical Devices Conference DMD2018 April 9-12, 2018, Minneapolis, MN, USA DMD2018-6822 THE APPLICATION OF SERIES ELASTIC ACTUATORS IN THE HYDRAULIC ANKLE-FOOT ORTHOSIS
Variable Stiffness Actuators : A General Review
 Variable Stiffness Actuators : A General Review Mr. S. A. Lavate Dept. of Mechanical Engineering Annasaheb Dange College of Engg. and Technology, Ashta- India Dr. R. G. Todkar Dept. of Mechanical Engineering
Variable Stiffness Actuators : A General Review Mr. S. A. Lavate Dept. of Mechanical Engineering Annasaheb Dange College of Engg. and Technology, Ashta- India Dr. R. G. Todkar Dept. of Mechanical Engineering
Project 16MA1: Efficient, Integrated, Freeform Flexible Hydraulic Actuators
 Georgia Institute of Technology Marquette University Milwaukee School of Engineering North Carolina A&T State University Purdue University University of California, Merced University of Illinois, Urbana-Champaign
Georgia Institute of Technology Marquette University Milwaukee School of Engineering North Carolina A&T State University Purdue University University of California, Merced University of Illinois, Urbana-Champaign
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur
 Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture 04 Actuation So, this particular lecture is on actuation.
Introduction to Internet of Things Prof. Sudip Misra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture 04 Actuation So, this particular lecture is on actuation.
Special edition paper
 Efforts for Greater Ride Comfort Koji Asano* Yasushi Kajitani* Aiming to improve of ride comfort, we have worked to overcome issues increasing Shinkansen speed including control of vertical and lateral
Efforts for Greater Ride Comfort Koji Asano* Yasushi Kajitani* Aiming to improve of ride comfort, we have worked to overcome issues increasing Shinkansen speed including control of vertical and lateral
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 4: Actuators Part 1 Chapter 3, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation and Control, The
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 4: Actuators Part 1 Chapter 3, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation and Control, The
Smart Automated Vent Register Using an SMA Spring Actuated Rotary Ratchet
 Smart Automated Vent Register Using an SMA Spring Actuated Rotary Ratchet Mary Molepske, Victor Braciszewski, James Butler, Gregory Caputo, Fan-Ning Cheng, WonHee Kim, Jonathan Luntz, Diann Brei ABSTRACT
Smart Automated Vent Register Using an SMA Spring Actuated Rotary Ratchet Mary Molepske, Victor Braciszewski, James Butler, Gregory Caputo, Fan-Ning Cheng, WonHee Kim, Jonathan Luntz, Diann Brei ABSTRACT
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Active Electrical Load Design for a Cluster POWER Rehabilitation System
 Active Electrical Load Design for a Cluster POWER Rehabilitation System Chung-Hsien Kuo Department of Electrical Engineering National Taiwan University of Science and Technology Email: chkuo@mail.ntust.edu.tw
Active Electrical Load Design for a Cluster POWER Rehabilitation System Chung-Hsien Kuo Department of Electrical Engineering National Taiwan University of Science and Technology Email: chkuo@mail.ntust.edu.tw
Product design: Mechanical systems
 Product design: Mechanical systems Recall Mechanisms can: change direction of movement, e.g. from clockwise to anticlockwise or from horizontal to vertical; change type of movement, e.g. from rotating
Product design: Mechanical systems Recall Mechanisms can: change direction of movement, e.g. from clockwise to anticlockwise or from horizontal to vertical; change type of movement, e.g. from rotating
Fig Electromagnetic Actuator
 This type of active suspension uses linear electromagnetic motors attached to each wheel. It provides extremely fast response, and allows regeneration of power consumed by utilizing the motors as generators.
This type of active suspension uses linear electromagnetic motors attached to each wheel. It provides extremely fast response, and allows regeneration of power consumed by utilizing the motors as generators.
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Fluidic Stochastic Modular Robotics: Revisiting the System Design
 Fluidic Stochastic Modular Robotics: Revisiting the System Design Viktor Zykov Hod Lipson Computational Synthesis Cornell University Grand Challenges in the Area of Self-Reconfigurable Modular Robots Self-repair
Fluidic Stochastic Modular Robotics: Revisiting the System Design Viktor Zykov Hod Lipson Computational Synthesis Cornell University Grand Challenges in the Area of Self-Reconfigurable Modular Robots Self-repair
TOWARDS A UNIVERSAL COUPLER DESIGN FOR MODERN POWERED PROSTHESES
 TOWARDS A UNIVERSAL COUPLER DESIGN FOR MODERN POWERED PROSTHESES Levi G. Sutton 1, Adam Clawson 2, T. Walley Williams III 3, James H. Lipsey 1, Jonathon W. Sensinger 1,4 1. Rehabilitation Institute of
TOWARDS A UNIVERSAL COUPLER DESIGN FOR MODERN POWERED PROSTHESES Levi G. Sutton 1, Adam Clawson 2, T. Walley Williams III 3, James H. Lipsey 1, Jonathon W. Sensinger 1,4 1. Rehabilitation Institute of
Exoskeleton Robot DesignBased on Multi-body Dynamics Simulation
 Exoskeleton Robot DesignBased on Multi-body Dynamics Simulation Chao Wang a, Guozhu Duan, Jie Xiao China North Vehicle Research Institute Beijing, China acwang21@163.com Abstract In order to implement
Exoskeleton Robot DesignBased on Multi-body Dynamics Simulation Chao Wang a, Guozhu Duan, Jie Xiao China North Vehicle Research Institute Beijing, China acwang21@163.com Abstract In order to implement
REU: Improving Straight Line Travel in a Miniature Wheeled Robot
 THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
THE INSTITUTE FOR SYSTEMS RESEARCH ISR TECHNICAL REPORT 2013-12 REU: Improving Straight Line Travel in a Miniature Wheeled Robot Katie Gessler, Andrew Sabelhaus, Sarah Bergbreiter ISR develops, applies
Accessories smart additions for efficiency and intelligent performance
 smart additions for efficiency and intelligent performance Metal bellows couplings Perfectionists you can count on Metal bellows couplings are designed for the highest requirements in servo drive technology.
smart additions for efficiency and intelligent performance Metal bellows couplings Perfectionists you can count on Metal bellows couplings are designed for the highest requirements in servo drive technology.
Development of Hybrid Type Flexible Pneumatic Cylinder for Considering Less Air Consumption
 MATEC Web of Conferences 82, Development of Hybrid Type Flexible Pneumatic Cylinder for Considering Less Air Consumption Hiroaki Tamaki 1, Shujiro Dohta 1, Tetsuya Akagi 1,a, Wataru Kobayashi 1 and Yasuko
MATEC Web of Conferences 82, Development of Hybrid Type Flexible Pneumatic Cylinder for Considering Less Air Consumption Hiroaki Tamaki 1, Shujiro Dohta 1, Tetsuya Akagi 1,a, Wataru Kobayashi 1 and Yasuko
Andrew J Bell. Institute for Materials Research University of Leeds
 Andrew J Bell Institute for Materials Research University of Leeds Yannis Goulermas University of Liverpool Neil Sims University of Sheffield Andrew Bell University of Leeds Meiling Zhu Cranfield University
Andrew J Bell Institute for Materials Research University of Leeds Yannis Goulermas University of Liverpool Neil Sims University of Sheffield Andrew Bell University of Leeds Meiling Zhu Cranfield University
Servo Creel Development
 Servo Creel Development Owen Lu Electroimpact Inc. owenl@electroimpact.com Abstract This document summarizes the overall process of developing the servo tension control system (STCS) on the new generation
Servo Creel Development Owen Lu Electroimpact Inc. owenl@electroimpact.com Abstract This document summarizes the overall process of developing the servo tension control system (STCS) on the new generation
Semi-Active Suspension for an Automobile
 Semi-Active Suspension for an Automobile Pavan Kumar.G 1 Mechanical Engineering PESIT Bangalore, India M. Sambasiva Rao 2 Mechanical Engineering PESIT Bangalore, India Abstract Handling characteristics
Semi-Active Suspension for an Automobile Pavan Kumar.G 1 Mechanical Engineering PESIT Bangalore, India M. Sambasiva Rao 2 Mechanical Engineering PESIT Bangalore, India Abstract Handling characteristics
Modeling and Optimization of a Linear Electromagnetic Piston Pump
 Fluid Power Innovation & Research Conference Minneapolis, MN October 10 12, 2016 ing and Optimization of a Linear Electromagnetic Piston Pump Paul Hogan, MS Student Mechanical Engineering, University of
Fluid Power Innovation & Research Conference Minneapolis, MN October 10 12, 2016 ing and Optimization of a Linear Electromagnetic Piston Pump Paul Hogan, MS Student Mechanical Engineering, University of
Proceedings of the World Congress on Engineering 2008 Vol II WCE 2008, July 2-4, 2008, London, U.K.
 Development and Optimization of Vibration Protection Seats (Tempered Springs) for Agricultural Tractor Ch.Sreedhar 1, Assoc. Professor; Dr. K.C.B. Raju 2, Dy.G.M.BHEL; Dr. K. Narayana Rao 3, AICTE; Abstract:
Development and Optimization of Vibration Protection Seats (Tempered Springs) for Agricultural Tractor Ch.Sreedhar 1, Assoc. Professor; Dr. K.C.B. Raju 2, Dy.G.M.BHEL; Dr. K. Narayana Rao 3, AICTE; Abstract:
Uncommon actuators in Robotic. Lukas Kopecny Brno University of Technology Czech Republic
 Uncommon actuators in Robotic Lukas Kopecny Brno University of Technology Czech Republic Why uncomon actuators? Common actuators Rigid Bulky (gearboxes) Problematic interaction Expensive Heavy Uncommon
Uncommon actuators in Robotic Lukas Kopecny Brno University of Technology Czech Republic Why uncomon actuators? Common actuators Rigid Bulky (gearboxes) Problematic interaction Expensive Heavy Uncommon
TAKE IT TO THE NEXEN LEVEL
 TAKE IT TO THE NEXEN LEVEL INDUSTRIES SERVED Aerospace Automation Equipment Automotive Bottling CNC Machining Commercial Laundry Equipment Converting Conveying Food Processing Machine Tool Material Handling
TAKE IT TO THE NEXEN LEVEL INDUSTRIES SERVED Aerospace Automation Equipment Automotive Bottling CNC Machining Commercial Laundry Equipment Converting Conveying Food Processing Machine Tool Material Handling
Muscle Force Assessment. Powered Orthotics
 Muscle Force Assessment Powered Orthotics William Durfee Department of Mechanical Engineering University of Minnesota Minneapolis, USA April 9-11, 2013 University Hotel, UMN www.dmd.umn.edu Muscle Force
Muscle Force Assessment Powered Orthotics William Durfee Department of Mechanical Engineering University of Minnesota Minneapolis, USA April 9-11, 2013 University Hotel, UMN www.dmd.umn.edu Muscle Force
Universal Fluid Power Trainer (UFPT)
") Universal Fluid Power Trainer (UFPT) The UFPT is a modular, smart and unique fluid power and motion control training unit. It contains an excellent integration of industrial-graded hardware and builtin
Universal Fluid Power Trainer (UFPT) The UFPT is a modular, smart and unique fluid power and motion control training unit. It contains an excellent integration of industrial-graded hardware and builtin
Modeling and Optimization of a Linear Electromagnetic Piston Pump
 Fluid Power Innovation & Research Conference Minneapolis, MN October 10 12, 2016 ing and Optimization of a Linear Electromagnetic Piston Pump Paul Hogan, MS Student Mechanical Engineering, University of
Fluid Power Innovation & Research Conference Minneapolis, MN October 10 12, 2016 ing and Optimization of a Linear Electromagnetic Piston Pump Paul Hogan, MS Student Mechanical Engineering, University of
Development of Dual-Arm Assistant Robot: the Manipulator Arm Control System
 Development of Dual-Arm Assistant Robot: the Manipulator Arm Control System Ivan Vladimirovich Krechetov 1, Arkady Alekseevich Skvortsov 2, Pavel Sergeevich Lavrikov 3 and Vladislavs Korotkovs 4 1 Reseacher,
Development of Dual-Arm Assistant Robot: the Manipulator Arm Control System Ivan Vladimirovich Krechetov 1, Arkady Alekseevich Skvortsov 2, Pavel Sergeevich Lavrikov 3 and Vladislavs Korotkovs 4 1 Reseacher,
MECHATRONICS LAB MANUAL
 MECHATRONICS LAB MANUAL T.E.(Mechanical) Sem-VI Department of Mechanical Engineering SIESGST, Nerul, Navi Mumbai LIST OF EXPERIMENTS Expt. No. Title Page No. 1. Study of basic principles of sensing and
MECHATRONICS LAB MANUAL T.E.(Mechanical) Sem-VI Department of Mechanical Engineering SIESGST, Nerul, Navi Mumbai LIST OF EXPERIMENTS Expt. No. Title Page No. 1. Study of basic principles of sensing and
Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA)
") Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA) G. S. Choi and H. K. Min Kia Motors Technical Center 3-61 INTRODUCTION The reason manufacturers invest their time
Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA) G. S. Choi and H. K. Min Kia Motors Technical Center 3-61 INTRODUCTION The reason manufacturers invest their time
Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc Championship Woodie Flowers Award
 President and Co-owner: AndyMark, Inc Championship Woodie Flowers Award") Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc. 2003 Championship Woodie Flowers Award Articulating Arms Telescoping Lifts Grippers Latches Turrets Ball Handling
Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc. 2003 Championship Woodie Flowers Award Articulating Arms Telescoping Lifts Grippers Latches Turrets Ball Handling
Week 4: Skipping & Lift Assists
 Week 4: Skipping & Lift Assists Build a lift that can raise and hold 4lbs of sacks 12 off the ground Learn build techniques for lifts Learn gear ratios Learn how to program more than the joystick Topic
Week 4: Skipping & Lift Assists Build a lift that can raise and hold 4lbs of sacks 12 off the ground Learn build techniques for lifts Learn gear ratios Learn how to program more than the joystick Topic
INCREASING ENERGY EFFICIENCY BY MODEL BASED DESIGN
 INCREASING ENERGY EFFICIENCY BY MODEL BASED DESIGN GREGORY PINTE THE MATHWORKS CONFERENCE 2015 EINDHOVEN 23/06/2015 FLANDERS MAKE Strategic Research Center for the manufacturing industry Integrating the
INCREASING ENERGY EFFICIENCY BY MODEL BASED DESIGN GREGORY PINTE THE MATHWORKS CONFERENCE 2015 EINDHOVEN 23/06/2015 FLANDERS MAKE Strategic Research Center for the manufacturing industry Integrating the
Timing Belts. Economical means to transfer power Meshing between belt teeth and those of the sprocket Clean No slip characteristic.
 Timing Belts Timing Belts Economical means to transfer power Meshing between belt teeth and those of the sprocket Clean No slip characteristic. Origins of the Timing Belt Trapezoidal profile developed
Timing Belts Timing Belts Economical means to transfer power Meshing between belt teeth and those of the sprocket Clean No slip characteristic. Origins of the Timing Belt Trapezoidal profile developed
Config file is loaded in controller; parameters are shown in tuning tab of SMAC control center
 Measuring Forces Force and Current limits on LCC The configuration file contains settings that limit the current and determine how the current values are represented. The most important setting (which
Measuring Forces Force and Current limits on LCC The configuration file contains settings that limit the current and determine how the current values are represented. The most important setting (which
Liquid-Fueled Actuation for an Anthropomorphic Upper Extremity Prosthesis
 Proceedings of the 28th IEEE EMBS Annual International Conference New York City, USA, Aug 30-Sept 3, 2006 SaD08.2 Liquid-Fueled Actuation for an Anthropomorphic Upper Extremity Prosthesis Kevin B. Fite,
Proceedings of the 28th IEEE EMBS Annual International Conference New York City, USA, Aug 30-Sept 3, 2006 SaD08.2 Liquid-Fueled Actuation for an Anthropomorphic Upper Extremity Prosthesis Kevin B. Fite,
Lectures on mechanics
 Lectures on mechanics (lesson #3) francesco.becchi@telerobot.it LESSONS TIME TABLE (pls. take note) 28/11 h9/12- mech components 1 (3h) 4/12 h9/12 mech components 2 (3h) 11/12 h9/12 mech technologies (3h)
Lectures on mechanics (lesson #3) francesco.becchi@telerobot.it LESSONS TIME TABLE (pls. take note) 28/11 h9/12- mech components 1 (3h) 4/12 h9/12 mech components 2 (3h) 11/12 h9/12 mech technologies (3h)
INTERCONNECTION POSSIBILITIES FOR THE WORKING VOLUMES OF THE ALTERNATING HYDRAULIC MOTORS
 Scientific Bulletin of the Politehnica University of Timisoara Transactions on Mechanics Special issue The 6 th International Conference on Hydraulic Machinery and Hydrodynamics Timisoara, Romania, October
Scientific Bulletin of the Politehnica University of Timisoara Transactions on Mechanics Special issue The 6 th International Conference on Hydraulic Machinery and Hydrodynamics Timisoara, Romania, October
Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators. By: J. Islam & Tiffany Stephenson
 Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators By: J. Islam & Tiffany Stephenson Components That Enable A Robots Actions Effector: Device that makes impact/influence on
Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators By: J. Islam & Tiffany Stephenson Components That Enable A Robots Actions Effector: Device that makes impact/influence on
Theory of Machines. CH-1: Fundamentals and type of Mechanisms
 CH-1: Fundamentals and type of Mechanisms 1. Define kinematic link and kinematic chain. 2. Enlist the types of constrained motion. Draw a label sketch of any one. 3. Define (1) Mechanism (2) Inversion
CH-1: Fundamentals and type of Mechanisms 1. Define kinematic link and kinematic chain. 2. Enlist the types of constrained motion. Draw a label sketch of any one. 3. Define (1) Mechanism (2) Inversion
LAP4, LAP8. Pneumatic linear drive sizes 4 and 8
 Pneumatic linear drive sizes 4 and Torsional and bending resistant profiles T-slots in the outer profile enable individual mounting options Adjustable guiding system (LAP4) Precise linear roller guiding
Pneumatic linear drive sizes 4 and Torsional and bending resistant profiles T-slots in the outer profile enable individual mounting options Adjustable guiding system (LAP4) Precise linear roller guiding
Energy ITS: What We Learned and What We should Learn
 Energy ITS: What We Learned and What We should Learn July 25, 2012 TRB Road Vehicle Automation Workshop Sadayuki Tsugawa, Dr. Eng. NEDO Energy ITS Project Leader Professor, Department of Information Engineering
Energy ITS: What We Learned and What We should Learn July 25, 2012 TRB Road Vehicle Automation Workshop Sadayuki Tsugawa, Dr. Eng. NEDO Energy ITS Project Leader Professor, Department of Information Engineering
Rover - Remote Operated Vehicle for Extraction and Reconnaissance
 IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 9, Issue 4 (Nov. - Dec. 2013), PP 38-42 Rover - Remote Operated Vehicle for Extraction and Reconnaissance
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 9, Issue 4 (Nov. - Dec. 2013), PP 38-42 Rover - Remote Operated Vehicle for Extraction and Reconnaissance
Mechanical Motion. Control Components. and Subsystems. Understanding How Components Effect System Performance
 Mechanical Motion Control Components and Subsystems Understanding How Components Effect System Performance Mechanical Motion Control Components and Subsystems Overview: Bearings Linear Bearing Technologies
Mechanical Motion Control Components and Subsystems Understanding How Components Effect System Performance Mechanical Motion Control Components and Subsystems Overview: Bearings Linear Bearing Technologies
Journal of Advanced Mechanical Design, Systems, and Manufacturing
 Pneumatic Valve Operated by Multiplex Pneumatic Transmission * Yasutaka NISHIOKA **, Koichi SUZUMORI **, Takefumi KANDA ** and Shuichi WAKIMOTO ** **Department of Natural Science and Technology, Okayama
Pneumatic Valve Operated by Multiplex Pneumatic Transmission * Yasutaka NISHIOKA **, Koichi SUZUMORI **, Takefumi KANDA ** and Shuichi WAKIMOTO ** **Department of Natural Science and Technology, Okayama
Contents. Page. 1. Product description. 2. The AXC line of linear axes. 3. AXLT line of linear tables. AXC and AXS product overview...
 SNR Industry Contents Page 3 1. Product description AXC and AXS product overview... 6-8 Dynamic load ratings of the linear motion systems... 9 Compact modules... 10-11 Linear tables... 12 Telescopic axes...
SNR Industry Contents Page 3 1. Product description AXC and AXS product overview... 6-8 Dynamic load ratings of the linear motion systems... 9 Compact modules... 10-11 Linear tables... 12 Telescopic axes...
Introduction to Abaqus/CAE. Abaqus 2018
 Introduction to Abaqus/CAE Abaqus 2018 About this Course Course objectives Upon completion of this course you will be able to: Use Abaqus/CAE to create complete finite element models. Use Abaqus/CAE to
Introduction to Abaqus/CAE Abaqus 2018 About this Course Course objectives Upon completion of this course you will be able to: Use Abaqus/CAE to create complete finite element models. Use Abaqus/CAE to
DESIGN GUIDE Push-Pull and Pull-Pull Controls Design Guide. Push-Pull Controls. Pull-Pull Controls
 CMA Control Cables DESIGN GUIDE Push-Pull and Pull-Pull Controls Design Guide There are many common, everyday applications that use efficient and reliable CMA controls. These applications include automotive
CMA Control Cables DESIGN GUIDE Push-Pull and Pull-Pull Controls Design Guide There are many common, everyday applications that use efficient and reliable CMA controls. These applications include automotive
LESSON Transmission of Power Introduction
 LESSON 3 3.0 Transmission of Power 3.0.1 Introduction Earlier in our previous course units in Agricultural and Biosystems Engineering, we introduced ourselves to the concept of support and process systems
LESSON 3 3.0 Transmission of Power 3.0.1 Introduction Earlier in our previous course units in Agricultural and Biosystems Engineering, we introduced ourselves to the concept of support and process systems
2F MEMS Proportional Pneumatic Valve
 2F MEMS Proportional Pneumatic Valve Georgia Institute of Technology Milwaukee School of Engineering North Carolina A&T State University Purdue University University of Illinois, Urbana-Champaign University
2F MEMS Proportional Pneumatic Valve Georgia Institute of Technology Milwaukee School of Engineering North Carolina A&T State University Purdue University University of Illinois, Urbana-Champaign University
Wireless Energy Transfer Through Magnetic Reluctance Coupling
 Wireless Energy Transfer Through Magnetic Reluctance Coupling P Pillatsch University of California Berkeley, Advanced Manufacturing for Energy, 2111 Etcheverry Hall, Berkeley, California, 947, USA E-mail:
Wireless Energy Transfer Through Magnetic Reluctance Coupling P Pillatsch University of California Berkeley, Advanced Manufacturing for Energy, 2111 Etcheverry Hall, Berkeley, California, 947, USA E-mail:
A Novel Active Damping Mechanism for Multi-Chambered Parallel Soft Robots
 A Novel Active Damping Mechanism for Multi-Chambered Parallel Soft Robots Ameer Hamza Khan, Zili Shao, Shuai Li Abstract Fabricated using silicones, soft robots, are highly elastic systems with the advantage
A Novel Active Damping Mechanism for Multi-Chambered Parallel Soft Robots Ameer Hamza Khan, Zili Shao, Shuai Li Abstract Fabricated using silicones, soft robots, are highly elastic systems with the advantage
CHAPTER 4: EXPERIMENTAL WORK 4-1
 CHAPTER 4: EXPERIMENTAL WORK 4-1 EXPERIMENTAL WORK 4.1 Preamble 4-2 4.2 Test setup 4-2 4.2.1 Experimental setup 4-2 4.2.2 Instrumentation, control and data acquisition 4-4 4.3 Hydro-pneumatic spring characterisation
CHAPTER 4: EXPERIMENTAL WORK 4-1 EXPERIMENTAL WORK 4.1 Preamble 4-2 4.2 Test setup 4-2 4.2.1 Experimental setup 4-2 4.2.2 Instrumentation, control and data acquisition 4-4 4.3 Hydro-pneumatic spring characterisation
STIFF TORQUE TRANSDUCER WITH HIGH OVERLOAD CAPABILITY AND DIRECT FREQUENCY OUTPUT
 STIFF TORQUE TRANSDUCER WITH HIGH OVERLOAD CAPABILITY AND DIRECT FREQUENCY OUTPUT T. Yan 1, B. E. Jones 1, R. T. Rakowski 1, M. J. Tudor 2, S. P. Beeby 2, N. M. White 2 1 The Brunel Centre for Manufacturing
STIFF TORQUE TRANSDUCER WITH HIGH OVERLOAD CAPABILITY AND DIRECT FREQUENCY OUTPUT T. Yan 1, B. E. Jones 1, R. T. Rakowski 1, M. J. Tudor 2, S. P. Beeby 2, N. M. White 2 1 The Brunel Centre for Manufacturing
Assemblies for Parallel Kinematics. Frank Dürschmied. INA reprint from Werkstatt und Betrieb Vol. No. 5, May 1999 Carl Hanser Verlag, München
 Assemblies for Parallel Kinematics Frank Dürschmied INA reprint from Werkstatt und Betrieb Vol. No. 5, May 1999 Carl Hanser Verlag, München Assemblies for Parallel Kinematics Frank Dürschmied Joints and
Assemblies for Parallel Kinematics Frank Dürschmied INA reprint from Werkstatt und Betrieb Vol. No. 5, May 1999 Carl Hanser Verlag, München Assemblies for Parallel Kinematics Frank Dürschmied Joints and
Metal Forming with Abaqus. Abaqus 2017
 Metal Forming with Abaqus Abaqus 2017 About this Course Course objectives In this course you will learn practical modeling skills and techniques for: Stamping Hydroforming Punch stretching Forging Rolling
Metal Forming with Abaqus Abaqus 2017 About this Course Course objectives In this course you will learn practical modeling skills and techniques for: Stamping Hydroforming Punch stretching Forging Rolling
Note 8. Electric Actuators
 Note 8 Electric Actuators Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 1 1. Introduction In a typical closed-loop, or feedback, control
Note 8 Electric Actuators Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 1 1. Introduction In a typical closed-loop, or feedback, control
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
B.TECH III Year I Semester (R09) Regular & Supplementary Examinations November 2012 DYNAMICS OF MACHINERY
 Regular & Supplementary Examinations November 2012 DYNAMICS OF MACHINERY") 1 B.TECH III Year I Semester (R09) Regular & Supplementary Examinations November 2012 DYNAMICS OF MACHINERY (Mechanical Engineering) Time: 3 hours Max. Marks: 70 Answer any FIVE questions All questions
1 B.TECH III Year I Semester (R09) Regular & Supplementary Examinations November 2012 DYNAMICS OF MACHINERY (Mechanical Engineering) Time: 3 hours Max. Marks: 70 Answer any FIVE questions All questions
Tire Uniformity Machine, LIBROTA
 Tire Uniformity Machine, LIBROTA Shinichiro IKAI *1, Yasuhiro MATSUSHITA *2 *1 Machinery Business Industrial Machinery Division Industrial Machinery Department *2 Machinery Business Industrial Machinery
Tire Uniformity Machine, LIBROTA Shinichiro IKAI *1, Yasuhiro MATSUSHITA *2 *1 Machinery Business Industrial Machinery Division Industrial Machinery Department *2 Machinery Business Industrial Machinery
Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines
 Project Number: MQP TP1- IPG1 Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines A Major Qualifying Project (MQP) Submitted to the Faculty of WORCESTER POYTECHNIC INSTITUTE
Project Number: MQP TP1- IPG1 Experimental Validation of a Scalable Mobile Robot for Traversing Ferrous Pipelines A Major Qualifying Project (MQP) Submitted to the Faculty of WORCESTER POYTECHNIC INSTITUTE
CHAPTER 1 INTRODUCTION
 1 CHAPTER 1 INTRODUCTION 1.1 ELECTRICAL MOTOR This thesis address the performance analysis of brushless dc (BLDC) motor having new winding method in the stator for reliability requirement of electromechanical
1 CHAPTER 1 INTRODUCTION 1.1 ELECTRICAL MOTOR This thesis address the performance analysis of brushless dc (BLDC) motor having new winding method in the stator for reliability requirement of electromechanical
Experimental Evaluation of a New Braking System for Use in Passive Haptic Displays
 Experimental Evaluation of a New Braking System for Use in Passive Haptic Displays S.Munir, L. Tognetti and W.J.Book George W.Woodruff School of Mechanical Engineering Georgia Institute Of Technology Atlanta,
Experimental Evaluation of a New Braking System for Use in Passive Haptic Displays S.Munir, L. Tognetti and W.J.Book George W.Woodruff School of Mechanical Engineering Georgia Institute Of Technology Atlanta,
Actuation and Power Electronics. Actuation and Power Electronics overview
 Actuation and Power Electronics Contents Mechatronics Training Curriculum Details of Course Actuation and Power Electronics Mechatronics Training Curriculum Premium Workshop Mechatronics System Design
Actuation and Power Electronics Contents Mechatronics Training Curriculum Details of Course Actuation and Power Electronics Mechatronics Training Curriculum Premium Workshop Mechatronics System Design
Enhancing Wheelchair Mobility Through Dynamics Mimicking
 Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
MS4SSA Robotics Modules: Mechanisms
 MS4SSA Robotics Modules: Mechanisms Kenechukwu Mbanisi Worcester Polytechnic Institute Mathematics and Science for Sub-Saharan Africa (MS4SSA): A World Bank Initiative to Improve Student Learning in Africa
MS4SSA Robotics Modules: Mechanisms Kenechukwu Mbanisi Worcester Polytechnic Institute Mathematics and Science for Sub-Saharan Africa (MS4SSA): A World Bank Initiative to Improve Student Learning in Africa
Config file is loaded in controller; parameters are shown in tuning tab of SMAC control center
 Forces using LCC Force and Current limits on LCC The configuration file contains settings that limit the current and determine how the current values are represented. The most important setting (which
Forces using LCC Force and Current limits on LCC The configuration file contains settings that limit the current and determine how the current values are represented. The most important setting (which
Mönninghoff electromagnetic tooth clutches
 Mönninghoff electromagnetic tooth clutches High torque without slip in compact size Angular synchronisation of input to output possible Torque limiting and other special tooth options readily available
Mönninghoff electromagnetic tooth clutches High torque without slip in compact size Angular synchronisation of input to output possible Torque limiting and other special tooth options readily available
Monolithically Integrated Micro Flapping Vehicles
 UNCLASSIFIED U.S. Army Research, Development and Engineering Command Monolithically Integrated Micro Flapping Vehicles Jeffrey S. Pulskamp, Ronald G. Polcawich, Gabriel L. Smith, Christopher M. Kroninger
UNCLASSIFIED U.S. Army Research, Development and Engineering Command Monolithically Integrated Micro Flapping Vehicles Jeffrey S. Pulskamp, Ronald G. Polcawich, Gabriel L. Smith, Christopher M. Kroninger
Railway Dynamics Studies at CITEF with SIMPACK
 2003 Railway Dynamics Studies at CITEF with SIMPACK Jenny Paulin citef.jpaulin@etsii.upm.es Berta Suárez citef.bsuarez@etsii.upm.es CITEF UPM Centro de Investigación en Tecnologías Ferroviarias Universidad
2003 Railway Dynamics Studies at CITEF with SIMPACK Jenny Paulin citef.jpaulin@etsii.upm.es Berta Suárez citef.bsuarez@etsii.upm.es CITEF UPM Centro de Investigación en Tecnologías Ferroviarias Universidad
Gabriel Szymkiewicz, Olga Szymanowska, Donat Lewandowski, Jan Awrejcewicz
 Hydraulic unit of rotation into linear motion conversion design, model, construction and testing Gabriel Szymkiewicz, Olga Szymanowska, Donat Lewandowski, Jan Awrejcewicz Abstract: An attempt to develop
Hydraulic unit of rotation into linear motion conversion design, model, construction and testing Gabriel Szymkiewicz, Olga Szymanowska, Donat Lewandowski, Jan Awrejcewicz Abstract: An attempt to develop
CORC Exploring Robotics. Unit B: Construction
 CORC 3303 Exploring Robotics Unit B: Construction Effectors and Actuators An effector is a device on a robot that has an impact or influence on the environment. An actuator is the mechanism that enables
CORC 3303 Exploring Robotics Unit B: Construction Effectors and Actuators An effector is a device on a robot that has an impact or influence on the environment. An actuator is the mechanism that enables
PRELIMINARY DESIGN REVIEW
 PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
PRELIMINARY DESIGN REVIEW AUBURN UNIVERSITY NASA LUNABOT TEAM MARCH 28, 2014 MATTHEW JONES DAVID FAUCETT STEWARD BOYD WILL FLOURNOY TECHNICAL ADVISOR/OVERLORD - DR. BEALE SPONSORS-DR. MADSEN, DR. WILLIAMS,
AUTOMATIC PNEUMATIC BUMPER AND BREAK ACTUATION BEFORE COLLISION.
 AUTOMATIC PNEUMATIC BUMPER AND BREAK ACTUATION BEFORE COLLISION. Shinde Ravindra B 1, Valvi Priyanka G 2, Shelake Balasaheb T 3, Shelke Pravin A 4, Gange Manoj D 5. 1 BE student Mechanical, SND COE & RC,
AUTOMATIC PNEUMATIC BUMPER AND BREAK ACTUATION BEFORE COLLISION. Shinde Ravindra B 1, Valvi Priyanka G 2, Shelake Balasaheb T 3, Shelke Pravin A 4, Gange Manoj D 5. 1 BE student Mechanical, SND COE & RC,
ACCOUNTING FOR LOST MOTION
 Backlash and deflection are critical factors when designing mechanical control cables. Mechanical control cables provide a simple, lightweight, economical, and reliable way to activate throttles, latches,
Backlash and deflection are critical factors when designing mechanical control cables. Mechanical control cables provide a simple, lightweight, economical, and reliable way to activate throttles, latches,
Thompson Consulting, Inc. Overview
 Thompson Consulting, Inc. Overview 9 Jacob Gates Road Harvard, MA 01451 Phone: (978) 456-7722 Fax: (240) 414-2655 www.thompsonrd.com info@thompsonrd.com Background of Principal BSEE ( 85), MS ( 92), and
Thompson Consulting, Inc. Overview 9 Jacob Gates Road Harvard, MA 01451 Phone: (978) 456-7722 Fax: (240) 414-2655 www.thompsonrd.com info@thompsonrd.com Background of Principal BSEE ( 85), MS ( 92), and
Sponsors. Rob Parkinson. Technical Head - Driveline and Transmission Systems Ricardo UK Ltd
 Sponsors Rob Parkinson Technical Head - Driveline and Transmission Systems Ricardo UK Ltd Rapid identification of transmission layouts for lowest vehicle energy consumption Rob Parkinson Technical Head,
Sponsors Rob Parkinson Technical Head - Driveline and Transmission Systems Ricardo UK Ltd Rapid identification of transmission layouts for lowest vehicle energy consumption Rob Parkinson Technical Head,
Design and construction of the Cornell Ranger, a world record distance walking robot.
 Design and construction of the Cornell Ranger, a world record distance walking robot. Internship at Cornell University J.G.Daniël Karssen j.g.d.karssen@student.tudelft.nl Cornell University Department
Design and construction of the Cornell Ranger, a world record distance walking robot. Internship at Cornell University J.G.Daniël Karssen j.g.d.karssen@student.tudelft.nl Cornell University Department
BMVSS Knee a low-cost passive prosthesis to replicate able-bodied motion
 BMVSS Knee a low-cost passive prosthesis to replicate able-bodied motion Molly Berringer, Paige Boehmcke, Jason Fischman, Athena Huang, Danny Joh, Cali Warner Mentor: Murthy Arelekatti May, 2, 2017 Final
BMVSS Knee a low-cost passive prosthesis to replicate able-bodied motion Molly Berringer, Paige Boehmcke, Jason Fischman, Athena Huang, Danny Joh, Cali Warner Mentor: Murthy Arelekatti May, 2, 2017 Final
Torque Limiter 320 Series Overview. Torque Limiter 320 Series
 Torque Limiter 0 Series Overview Torque Limiter 0 Series Torque Limiter 0 Series For more than 80 years, Autogard products have led the industry in overload protection with high-quality products, design
Torque Limiter 0 Series Overview Torque Limiter 0 Series Torque Limiter 0 Series For more than 80 years, Autogard products have led the industry in overload protection with high-quality products, design
2. Low speed, high torque characteristics, compact size and quiet operation: 3. Compact-sized actuators:
 CONTENT 1) ABSTRACT 2) INTRODUCTION 3)USM PROTOTYPES 1. Linear ultrasonic motors I) DOF planar pin-type actuator II) Bi-directional linear standing wave USM 2. Rotary ultrasonic motor 3. Spherical ultrasonic
CONTENT 1) ABSTRACT 2) INTRODUCTION 3)USM PROTOTYPES 1. Linear ultrasonic motors I) DOF planar pin-type actuator II) Bi-directional linear standing wave USM 2. Rotary ultrasonic motor 3. Spherical ultrasonic
Magnetostrictive Actuator
 Magnetostrictive Actuator Project Proposal Randall Bateman, Aaron Bolyen, Chris Cleland Alex Lerma, Xavier Petty, Michael Roper December 11, 2015 Overview Introduction Need Statement/Goals Constraints
Magnetostrictive Actuator Project Proposal Randall Bateman, Aaron Bolyen, Chris Cleland Alex Lerma, Xavier Petty, Michael Roper December 11, 2015 Overview Introduction Need Statement/Goals Constraints
A System and Method of Maneuvering Powered Exoskeleton Using Mechanical and Hydraulic Feedback
 A System and Method of Maneuvering Powered Exoskeleton Using Mechanical and Hydraulic Feedback M. K. Vimal Govind and K. Padmakumar Mechanical, M.E.S. College of Engineering, Kuttippuram, India Email:
A System and Method of Maneuvering Powered Exoskeleton Using Mechanical and Hydraulic Feedback M. K. Vimal Govind and K. Padmakumar Mechanical, M.E.S. College of Engineering, Kuttippuram, India Email:
BALL AND ROLLER TORQUE LIMITERS DSS or DSR : introduction
 BALL AND ROLLER TORQUE LIMITERS or : introduction Precise torque setting by adjusting the radially balanced locking nut. The innovative regulation of the nominal torque by measuring the H dimension allows
BALL AND ROLLER TORQUE LIMITERS or : introduction Precise torque setting by adjusting the radially balanced locking nut. The innovative regulation of the nominal torque by measuring the H dimension allows
Remote Control Parking (RCP)
") Informal document GRRF-80-18 80 th GRRF, 15-18 September 2015, Agenda item 8(b) Remote Control Parking (RCP) A safe and comfortable parking solution Submitted by the Experts of OICA 80th GRRF, Geneva,
Informal document GRRF-80-18 80 th GRRF, 15-18 September 2015, Agenda item 8(b) Remote Control Parking (RCP) A safe and comfortable parking solution Submitted by the Experts of OICA 80th GRRF, Geneva,
Universal Fluid Power Trainer (UFPT)
") Universal Fluid Power Trainer (UFPT) Milwaukee School of Engineering Applied Technology Center TM Department of Professional Education The UFPT is a modular, smart and unique fluid power and motion control
Universal Fluid Power Trainer (UFPT) Milwaukee School of Engineering Applied Technology Center TM Department of Professional Education The UFPT is a modular, smart and unique fluid power and motion control
The linear motor technology for industrial applications
 Industrial Linear Motors Purely electrical drive system Freely positionable along the entire stroke For precise and dynamic positioning tasks Direct drive technology provides longer life Clean room certification
Industrial Linear Motors Purely electrical drive system Freely positionable along the entire stroke For precise and dynamic positioning tasks Direct drive technology provides longer life Clean room certification
GatesFacts Technical Information Library Gates Compass Power Transmission CD-ROM version 1.2 The Gates Rubber Company Denver, Colorado USA
 Timing Belt Selection And Troubleshooting David E. Roos Maintenance Technology September 1989 Evenly spaced teeth on the bottom surface of synchronous or timing belts mesh with grooves on the pulleys for
Timing Belt Selection And Troubleshooting David E. Roos Maintenance Technology September 1989 Evenly spaced teeth on the bottom surface of synchronous or timing belts mesh with grooves on the pulleys for
Traffic Control Optimization for Multi-Modal Operations in a Large-Scale Urban Network
 Traffic Control Optimization for Multi-Modal Operations in a Large-Scale Urban Network Cameron Kergaye, PhD, PMP, PE UDOT Director of Research 13th Annual NJDOT Research Showcase October 27 th, 2011 Improve
Traffic Control Optimization for Multi-Modal Operations in a Large-Scale Urban Network Cameron Kergaye, PhD, PMP, PE UDOT Director of Research 13th Annual NJDOT Research Showcase October 27 th, 2011 Improve
INNOVATION POWERING SAFRAN
 INNOVATION POWERING SAFRAN Stéphane CUEILLE, Chief Technology Officer 106 Safran - Capital Markets Day / November 29, Technology, key to our competitiveness R&T plan BUSINESSES PROPULSION EQUIPMENT INTERIORS
INNOVATION POWERING SAFRAN Stéphane CUEILLE, Chief Technology Officer 106 Safran - Capital Markets Day / November 29, Technology, key to our competitiveness R&T plan BUSINESSES PROPULSION EQUIPMENT INTERIORS
EFFICIENZA E ANALISI TERMICA. Ing. Ivan Saltini Italy Country Manager
 EFFICIENZA E ANALISI TERMICA Ing. Ivan Saltini Italy Country Manager How to get most realistic efficiency calculation for gearboxes? Topics Motivation / general calculation Industrial bevel-helical gearbox
EFFICIENZA E ANALISI TERMICA Ing. Ivan Saltini Italy Country Manager How to get most realistic efficiency calculation for gearboxes? Topics Motivation / general calculation Industrial bevel-helical gearbox
Overview. There are three (3) New Era Units Available. Two (2) of these units are designed to wind up a product web.
 New Era Units Available. Two (2) of these units are designed to wind up a product web.") Overview There are three (3) Units Available. Two (2) of these units are designed to wind up a product web. The web widths these units are capable of handling are From 50 wide to 13 wide The Winders have
Overview There are three (3) Units Available. Two (2) of these units are designed to wind up a product web. The web widths these units are capable of handling are From 50 wide to 13 wide The Winders have
Hydraulic Flywheel Accumulator for Mobile Energy Storage
 Hydraulic Flywheel Accumulator for Mobile Energy Storage Paul Cronk University of Minnesota October 14 th, 2015 I. Overview Outline I. Background on Mobile Energy Storage II. Hydraulic Flywheel Accumulator
Hydraulic Flywheel Accumulator for Mobile Energy Storage Paul Cronk University of Minnesota October 14 th, 2015 I. Overview Outline I. Background on Mobile Energy Storage II. Hydraulic Flywheel Accumulator
GPS Map Tracking of Fuzzy Logic Based Lateral Control
 GPS Map Tracking of Fuzzy Logic Based Lateral Control S. Indhu Rekhaa, UG scholar (3rd year), Information technology, Panimalar Institute of Technology, Chennai, Tamilnadu. Abstract- The robotic control
GPS Map Tracking of Fuzzy Logic Based Lateral Control S. Indhu Rekhaa, UG scholar (3rd year), Information technology, Panimalar Institute of Technology, Chennai, Tamilnadu. Abstract- The robotic control
MARITIME AFTERNOON. Torben Ole Andersen. June 14, 2017 Aalborg University, Denmark
 MARITIME AFTERNOON HYDRAULICS Torben Ole Andersen June 14, 2017 Aalborg University, Denmark Agenda Marine Propellers Digital Hydraulics in a Hydraulic Winch Secondary Control in of Multi -Chamber Cylinders
MARITIME AFTERNOON HYDRAULICS Torben Ole Andersen June 14, 2017 Aalborg University, Denmark Agenda Marine Propellers Digital Hydraulics in a Hydraulic Winch Secondary Control in of Multi -Chamber Cylinders
Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints
 Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director:
Distributed Compliance Controllers for Legged- Robot with Geared Brushless DC Joints Lan Yue Ji, Sebatian Bartsch, Frank Kirchner DFKI Bremen & Universität Bremen Robotics Innovations Center Director: