Soft Actuation for Humanoids
|
|
|
- Chad Collins
- 6 years ago
- Views:
Transcription
 7th Workshop on Humanoid Soccer Robots IEEE Ihumanoids 2012,")
1 Soft Actuation for Humanoids Nikos Tsagarakis Humanoid & Human Centred Mechatronics Lab Dept. of Advanced Robotics Istituto Italiano di Tecnologia (IIT) 7th Workshop on Humanoid Soccer Robots IEEE Ihumanoids 2012, Osaka, Japan, 29th November 2012

2 VIACTORS The goal is to design, realize and evaluate new range of actuator groups exhibiting variable stiffness, variable damping or full impedance regulation principles AMARSI The goal of AMARSi is to achieve a qualitative jump toward rich motor behaviour where novel mechanics, control and learning solutions are integrated with each other 2



3 Robot soccer whole body physical interaction explosive/high power motions dynamic balancing against strong disturbances impacts with ground and other bodies 3


4 Biological muscle actuation two or more muscles for each joint soft with tunable stiffness robust and highly tolerant to impacts can store energy and generate explosive motions highly adaptable and stable to load and interaction 4




5 Robotic actuation for humanoids Electrical Hydraulic Stiff actuation for accuracy + Active compliance regulation HONDA ASIMO BOSTON DYNAMICS PETMAN 5
6 Predominant robot actuation (electrical motor) The actuation principle of most existing motorized robots uses a combination of Planetary or harmonic drive gears and DC brush or brushless motors Relative high gearing position control groups (>100:1) Limited back-drivability Minimum passive compliance (mostly from tendons) No direct joint torque sensing 6
7 The need of compliance Robots coperating / interacting (purposely or accidentally) with their environment have different requirements than the current stiff robotic systems Accuracy and speed are necessary but probably not the highest priorities Adaptability to interaction (whole body level), safety and robustness is at least of equal significance How to satisfy the new requirements? Stiff body/actuation for accuracy + Active/Controlled impedance to satisfy new requirements Intrinsic body compliance + Control to satisfy traditional performance indexes 7
 C: A and B")
8 Intrinsic passive compliance Effect on the impact forces Compliance can been introduced: A: between the actuator and the link B: around the link/structure (soft cover) C: A and B 8


9 Effect of the stiffness to the impact forces: unconstrained case Parameter Link reflected mass Rotor reflected mass External object mass Impact speed Value 1.85 kg 0.79 kg 5 kg 3 m/s 9


10 Effect of the stiffness to the impact forces: constrained case Parameter Link reflected mass Rotor reflected mass External object mass Impact speed Value 1.85 kg 0.79 kg 5 kg 3 m/s 10
11 The AMARSI project The goal of AMARSi is to make a qualitative jump toward rich motor behaviour where novel mechanical, control and learning solutions are integrated with each other AMARSI passive COMpliant humanoid (COMAN) a full humanoid robot 25 major degrees of freedom (arms/legs and torso excluding hands and neck/head) intrinsic passive compliance joint torque sensing/active compliance IEEE Humanoids 2012, Workshop on On Real World Challenges for Humanoids 11

12 COmpliant HuMANoid COMAN Actuation moderate to high power passive series compliance legs (ankle/knee and hip sagittal joints) torso (pitch and yaw) arms: (shoulder and elbow) elimination of cable transmissions Sensing joint torque sensing 2 x 6 DOF F/T sensors IMU at the lower torso Power autonomy battery power management system On board computation power 2 x PC104 (1 inside the torso and one in the head) Body housing internal electrical wiring routing full body covers (no exposed components/wires) 12
13 COMAN Kinematics Joint Number of DOF Ankle 2 Knee 1 Hip 3 Waist 3 Shoulder 3 Elbow 1 Neck 2 13



14 The CompAct actuator Harmonic drive Harmonic drive encoder Output pulley Spring deflection encoder Input Pulley Frameless Brushless motor Torque Sensor 14




15 The CompAct actuator Diameter 70mm Length 80mm Power 152W Gear Ratio 100:1 Peak torque 55Nm Max rotary passive +/-0.2rad deflection Weight 0.52Kg 15

16 COM state control gait generator Zhibin Li, et. al, ICRA
17 Motivation springs reduce the control bandwidth of the actuation system spectrum of ZMP signal is higher than that of the COM the ZMP method requires a time based ZMP trajectory planning, which may violate the natural dynamics of the compliant robot system 17
18 Lateral gait control given,, desire velocity to stop at y z c y V ref y s s y ref V y updates online at every control loop simple control law z y Zhibin Li, et. al, ICRA 2012 y 18

19 COM state control gait generator 19

20 Balancing against push disturbances Three actions recovery strategy Whole body compliance control Body attitude regulation Manipulation of GRF 20
21 Stabilization strategies Transversal plane compliance control: to control compliance by modulating the horizontal COM position based on overall COP feedback Body attitude control: to control body inclination based on the low frequency component of the overall COP feedback Enlargement of horizontal force by increasing vertical GRF based on overall COP feedback

22 Transversal plane compliance control In analogy to admittance schemes


23 Body attitude control Upper body inclination control is used to shift the upper body mass towards by performing a leaning motion 23
24 COMAN lower body early tests 24
25 Experimental response 25


26 COmpliant humanoid COMAN Oral session II: Dynamics and Skills, 13:20-15:00, Friday the 30 th Zhibin Li, N.G. Tsagarakis, D.G. Caldwell, A Passivity Based Admittance Control for Stabilizing the Compliant Humanoid COMAN, 26




27 and some recent trials with COMAN Nicolas Perrin IEEE Humanoids 2012, Workshop On Real World Challenges for Humanoids Mohamad Mosadeghzad 27
28 Fixed and variable compliance Fixed series elasticity (SEA) passively adaptable inherently safer makes the robot more tolerant to impacts does not need additonal actuation can be combined with active stiffness regulation preset passive mechanical compliance performance is compromised Variable impedance actuators passively adaptable inherently safer makes the robot more tolerant to impacts compliance can be reguled according to task needs accuracy, efficiency or safety performance can be maintained complex, requires additiotal actuators for the impedance tuning application to MDOF systems is not trivial 28

")
29 Variable Stiffness Actuators (VSAs) Antagonistic Serial 29





 Hybrid VSA:")
 QA-Joint: O.")
 VSA")
30 VSAs prototypes VSA: G. Tonietti et al. (2005) VSA-II: R. Schiavi et al. (2008) MACCEPA: R. Van Ham et al. (2007) VS-Joint: S. Wolf et al. (2008) MACCEPA 2.0: B. Vanderborght et al. (2009) Hybrid VSA: Byeong-Sang Kim et al. (2010) QA-Joint: O. Eiberger et al. FSJ: Wolf et al. ICRA 2011 (2010) VSA Cube: Catalano et al. ICRA


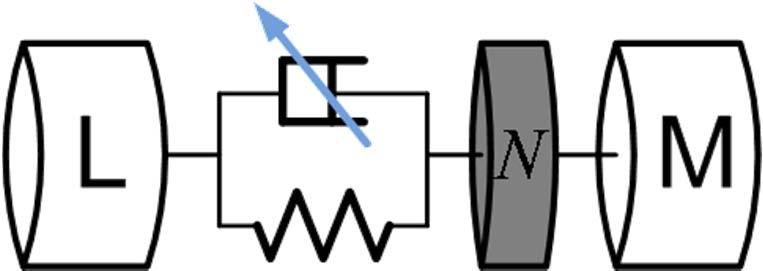
31 From CompAct to CompAct-VSA Fixed stiffness joint Variable stiffness joint r Variable damper K T 6 K S f ( r 2 ) 31





32 The lever arm principle AwAS: A. Jafari et al., IROS 2010 Energy Efficient VSA: L.C. Visser et al., ICRA 2010 AwAS II Jafari et al., ICRA 2011, Hybrid actuator: Byeong-Sang Kim et al., ICRA
33 CompAct-VSA: Lever arm with variable pivot point principle High Stiffness Low Stiffness 33
")
 Cam Shaped Lever Arm E)")
 Springs P)")
34 CompAct-VSA: Realization Variable Stiffness Module A) Link/Cam Connection B) Joint Axis C) Cam Shaped Lever Arm E) Cam Roller F) Rack/Pinion G) Stiffness Motor H) Springs P) Pivot Point P A F 34
35 Stiffness & passive deflection profiles Stiffness Passive deflection angle range 35
36 Stiffness response:experimental results Pivot Tracking Stiffness Tracking Pivot Step Stiffness Step 36
 1.2 Peak Output Torque (Nm) 117 Length (m) 0.10 Width (m) 0.11 Overall Weight (Kg) 1.")
37 CompAct-VSA: Prototype CompAct-VSA Range of Motion (deg) +/-150 Range of Stiffness (Nm/rad) Time to change the stiffness (s) 0 ~ rigid ~0.2sec Energy storage (J) 1.2 Peak Output Torque (Nm) 117 Length (m) 0.10 Width (m) 0.11 Overall Weight (Kg)
38 Stiffness and damping regulation in humans Suppress oscillations Humans improve accuracy and motion control by varying the stiffness and damping of the joints to appropriate values Large amplitude oscillations: muscles co-contraction damping stiffness Low amplitude oscillations: intrinsic damping of muscles low energy expenditure Voluntary motions damping, stiffness inverse function of velocity Elbow flex-extension (Lacquaniti et al, 82) C = [ ] [Nms/rad] ζ = [ ] K = [ ] [Nm/rad] Milner and Cloutier, Exp. Brain Research,



39 Damping for compliant joints Compliance: Precision Bandwidth Oscillations CONS q θ q θ qd q 39

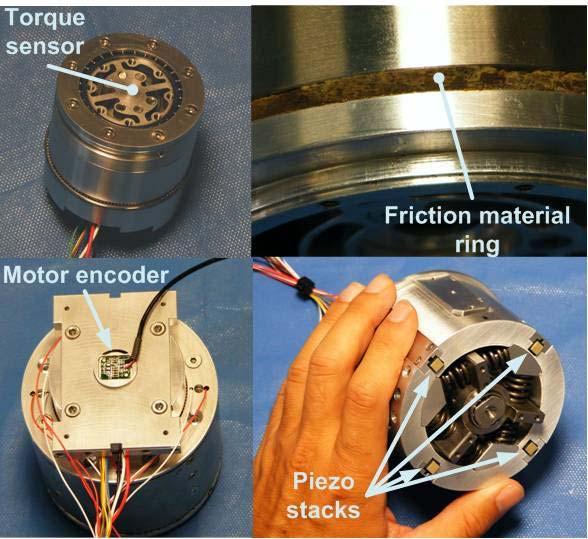
40 VPDA -Variable physical damping actuator Motivation facilitates control inherently damps vibrations reduces control effort Intrinsically passive improve dynamic performance Spring energy management Principle & Features semi-active Solution introduces real physical damping piezoelectric actuation IEEE ICRA 2012, Workshop on Variable Impedance Actuators Moving the Robots of Tomorrow 40





41 SEA + Variable physical damping actuator VPDA SEA + Laffranchi et al. ICRA

42 Experimental results Mass-spring-damper system Damping ratio Free response to initial conditions Experimental setup 42





43 VPDA actuated arm IEEE ICRA 2012, Workshop on Variable Impedance Actuators Moving the Robots of Tomorrow 43

44 VPDA and Arm prototype 44

45 Any questions? 45
Variable Stiffness Actuators : A General Review
 Variable Stiffness Actuators : A General Review Mr. S. A. Lavate Dept. of Mechanical Engineering Annasaheb Dange College of Engg. and Technology, Ashta- India Dr. R. G. Todkar Dept. of Mechanical Engineering
Variable Stiffness Actuators : A General Review Mr. S. A. Lavate Dept. of Mechanical Engineering Annasaheb Dange College of Engg. and Technology, Ashta- India Dr. R. G. Todkar Dept. of Mechanical Engineering
Development of Dual-Arm Assistant Robot: the Manipulator Arm Control System
 Development of Dual-Arm Assistant Robot: the Manipulator Arm Control System Ivan Vladimirovich Krechetov 1, Arkady Alekseevich Skvortsov 2, Pavel Sergeevich Lavrikov 3 and Vladislavs Korotkovs 4 1 Reseacher,
Development of Dual-Arm Assistant Robot: the Manipulator Arm Control System Ivan Vladimirovich Krechetov 1, Arkady Alekseevich Skvortsov 2, Pavel Sergeevich Lavrikov 3 and Vladislavs Korotkovs 4 1 Reseacher,
A Simple and Scalable Force Actuator
 A Simple and Scalable Force Actuator Eduardo Torres-Jara and Jessica Banks Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 200 Technology Square, Cambridge,
A Simple and Scalable Force Actuator Eduardo Torres-Jara and Jessica Banks Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 200 Technology Square, Cambridge,
Development of High-Power and Backdrivable Linear Electro-Hydrostatic Actuator*
 2014 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids) November 18-20, 2014. Madrid, Spain Development of High-Power and Backdrivable Linear Electro-Hydrostatic Actuator* Hiroshi Kaminaga
2014 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids) November 18-20, 2014. Madrid, Spain Development of High-Power and Backdrivable Linear Electro-Hydrostatic Actuator* Hiroshi Kaminaga
Adult Sized Humanoid Robot: Archie
 Adult Sized Humanoid Robot: Archie Jacky Baltes 1, Chi Tai Cheng 1, M.C. Lau 1, Ahmad Byagowi 2, Peter Kopacek 2, and John Anderson 1 1 Autonomous Agent Lab University of Manitoba Winnipeg, Manitoba Canada,
Adult Sized Humanoid Robot: Archie Jacky Baltes 1, Chi Tai Cheng 1, M.C. Lau 1, Ahmad Byagowi 2, Peter Kopacek 2, and John Anderson 1 1 Autonomous Agent Lab University of Manitoba Winnipeg, Manitoba Canada,
The experimental Robot Project
 The experimental Robot Project Felix darthrake Schneider Norbert Braun {felix,norbert}@xrpbot.org 31c3 2014-12-27 1 2 3 BLDC motors Sensors Gears and Actuators Motor Testbed Other Projects : Goals The
The experimental Robot Project Felix darthrake Schneider Norbert Braun {felix,norbert}@xrpbot.org 31c3 2014-12-27 1 2 3 BLDC motors Sensors Gears and Actuators Motor Testbed Other Projects : Goals The
Introduction to Robotics
 Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Research Center Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7,
Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Research Center Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7,
Soft Robotics Variable Stiffness Exo-Musculature, One-To-Many Concept, and Advanced Clutches
 ICRA 2012 WORKSHOP: Variable Stiffness Actuators moving the Robots of Tomorrow Soft Robotics Variable Stiffness Exo-Musculature, One-To-Many Concept, and Advanced Clutches Thane R. Hunt, Christopher J.
ICRA 2012 WORKSHOP: Variable Stiffness Actuators moving the Robots of Tomorrow Soft Robotics Variable Stiffness Exo-Musculature, One-To-Many Concept, and Advanced Clutches Thane R. Hunt, Christopher J.
BioRob: A Really Lightweight and Safe Robot Arm for Mobile Human-Robot Interaction
 BioRob: A Really Lightweight and Safe Robot Arm for Mobile Human-Robot Interaction Dipl.-Ing. Thomas Lens, Prof. Dr. Oskar von Stryk Technische Universität Darmstadt Department of Computer Science Simulation,
BioRob: A Really Lightweight and Safe Robot Arm for Mobile Human-Robot Interaction Dipl.-Ing. Thomas Lens, Prof. Dr. Oskar von Stryk Technische Universität Darmstadt Department of Computer Science Simulation,
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
The DLR FSJ: Energy based design of a variable stiffness joint
 211 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 211, Shanghai, China The DLR FSJ: Energy based design of a variable stiffness joint Sebastian
211 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 211, Shanghai, China The DLR FSJ: Energy based design of a variable stiffness joint Sebastian
Adult Sized Humanoid Robot: Archie
 Adult Sized Humanoid Robot: Archie Jacky Baltes 1, Chi Tai Cheng 1, M.C. Lau 1, Peter Kopacek 2, and John Anderson 1 1 Autonomous Agent Lab University of Manitoba Winnipeg, Manitoba Canada, R3T 2N2 j.baltes@cs.umanitoba.ca
Adult Sized Humanoid Robot: Archie Jacky Baltes 1, Chi Tai Cheng 1, M.C. Lau 1, Peter Kopacek 2, and John Anderson 1 1 Autonomous Agent Lab University of Manitoba Winnipeg, Manitoba Canada, R3T 2N2 j.baltes@cs.umanitoba.ca
Enhancing Wheelchair Mobility Through Dynamics Mimicking
 Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Proceedings of the 3 rd International Conference Mechanical engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 65 Enhancing Wheelchair Mobility Through Dynamics Mimicking
Semi-Active Suspension for an Automobile
 Semi-Active Suspension for an Automobile Pavan Kumar.G 1 Mechanical Engineering PESIT Bangalore, India M. Sambasiva Rao 2 Mechanical Engineering PESIT Bangalore, India Abstract Handling characteristics
Semi-Active Suspension for an Automobile Pavan Kumar.G 1 Mechanical Engineering PESIT Bangalore, India M. Sambasiva Rao 2 Mechanical Engineering PESIT Bangalore, India Abstract Handling characteristics
Evaluations on Contribution of Backdrivability and Force Measurement Performance on Force Sensitivity of Actuators*
 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Evaluations on Contribution of Backdrivability and Force Measurement Performance on Force
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Evaluations on Contribution of Backdrivability and Force Measurement Performance on Force
T-MAX SERIES Direct Drive Rotary Servo
 T-MAX SERIES Direct Drive Rotary Servo T-MAX SERIES Direct Drive Rotary Servo Low Profile Direct-drive Rotary Stage Smooth Brushless Servo-drive Positioning Motion Integrated High Resolution Rotary Encoder
T-MAX SERIES Direct Drive Rotary Servo T-MAX SERIES Direct Drive Rotary Servo Low Profile Direct-drive Rotary Stage Smooth Brushless Servo-drive Positioning Motion Integrated High Resolution Rotary Encoder
MODELS FOR THE DYNAMIC ANALYSIS OF THE SUSPENSION SYSTEM OF THE VEHICLES REAR AXLE
 MODELS FOR THE DYNAMIC ANALYSIS OF THE SUSPENSION SYSTEM OF THE VEHICLES REAR AXLE Alexandru Cătălin Transilvania University of Braşov, Product Design and Robotics Department, calex@unitbv.ro Keywords:
MODELS FOR THE DYNAMIC ANALYSIS OF THE SUSPENSION SYSTEM OF THE VEHICLES REAR AXLE Alexandru Cătălin Transilvania University of Braşov, Product Design and Robotics Department, calex@unitbv.ro Keywords:
MARITIME AFTERNOON. Torben Ole Andersen. June 14, 2017 Aalborg University, Denmark
 MARITIME AFTERNOON HYDRAULICS Torben Ole Andersen June 14, 2017 Aalborg University, Denmark Agenda Marine Propellers Digital Hydraulics in a Hydraulic Winch Secondary Control in of Multi -Chamber Cylinders
MARITIME AFTERNOON HYDRAULICS Torben Ole Andersen June 14, 2017 Aalborg University, Denmark Agenda Marine Propellers Digital Hydraulics in a Hydraulic Winch Secondary Control in of Multi -Chamber Cylinders
CHAPTER 6 MECHANICAL SHOCK TESTS ON DIP-PCB ASSEMBLY
 135 CHAPTER 6 MECHANICAL SHOCK TESTS ON DIP-PCB ASSEMBLY 6.1 INTRODUCTION Shock is often defined as a rapid transfer of energy to a mechanical system, which results in a significant increase in the stress,
135 CHAPTER 6 MECHANICAL SHOCK TESTS ON DIP-PCB ASSEMBLY 6.1 INTRODUCTION Shock is often defined as a rapid transfer of energy to a mechanical system, which results in a significant increase in the stress,
Active Driver Assistance for Vehicle Lanekeeping
 Active Driver Assistance for Vehicle Lanekeeping Eric J. Rossetter October 30, 2003 D D L ynamic esign aboratory Motivation In 2001, 43% of all vehicle fatalities in the U.S. were caused by a collision
Active Driver Assistance for Vehicle Lanekeeping Eric J. Rossetter October 30, 2003 D D L ynamic esign aboratory Motivation In 2001, 43% of all vehicle fatalities in the U.S. were caused by a collision
DAMPING OF VIBRATION IN BELT-DRIVEN MOTION SYSTEMS USING A LAYER OF LOW-DENSITY FOAM
 DAMPING OF VIBRATION IN BELT-DRIVEN MOTION SYSTEMS USING A LAYER OF LOW-DENSITY FOAM Kripa K. Varanasi and Samir A. Nayfeh Department of Mechanical Engineering Massachusetts Institute of Technology Cambridge,
DAMPING OF VIBRATION IN BELT-DRIVEN MOTION SYSTEMS USING A LAYER OF LOW-DENSITY FOAM Kripa K. Varanasi and Samir A. Nayfeh Department of Mechanical Engineering Massachusetts Institute of Technology Cambridge,
Relevant friction effects on walking machines
 Relevant friction effects on walking machines Elena Garcia and Pablo Gonzalez-de-Santos Industrial Automation Institute (CSIC) 28500 Madrid, Spain email: egarcia@iai.csic.es Key words: Legged robots, friction
Relevant friction effects on walking machines Elena Garcia and Pablo Gonzalez-de-Santos Industrial Automation Institute (CSIC) 28500 Madrid, Spain email: egarcia@iai.csic.es Key words: Legged robots, friction
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Positioning Systems. Torque Motor Rotary Tables Product Overview and Application Areas
 62 M99TE5-15 5.1 Product Overview and Application Areas The extremely rigid connection between motor and load, and a servo-drive regulation ensures excellent acceleration capabilities and good uniformity
62 M99TE5-15 5.1 Product Overview and Application Areas The extremely rigid connection between motor and load, and a servo-drive regulation ensures excellent acceleration capabilities and good uniformity
The Synaptic Damping Control System:
 The Synaptic Damping Control System: increasing the drivers feeling and perception by means of controlled dampers Giordano Greco Magneti Marelli SDC Vehicle control strategies From passive to controlled
The Synaptic Damping Control System: increasing the drivers feeling and perception by means of controlled dampers Giordano Greco Magneti Marelli SDC Vehicle control strategies From passive to controlled
Force-controlled Metal Spinning Machine Using Linear Motors
 Proceedings of the 2006 IEEE International Conference on Robotics and Automation Orlando, Florida - May 2006 Force-controlled Metal Spinning Machine Using Linear Motors Hirohiko Arai Intelligent Systems
Proceedings of the 2006 IEEE International Conference on Robotics and Automation Orlando, Florida - May 2006 Force-controlled Metal Spinning Machine Using Linear Motors Hirohiko Arai Intelligent Systems
CORC Exploring Robotics. Unit B: Construction
 CORC 3303 Exploring Robotics Unit B: Construction Effectors and Actuators An effector is a device on a robot that has an impact or influence on the environment. An actuator is the mechanism that enables
CORC 3303 Exploring Robotics Unit B: Construction Effectors and Actuators An effector is a device on a robot that has an impact or influence on the environment. An actuator is the mechanism that enables
Special edition paper
 Efforts for Greater Ride Comfort Koji Asano* Yasushi Kajitani* Aiming to improve of ride comfort, we have worked to overcome issues increasing Shinkansen speed including control of vertical and lateral
Efforts for Greater Ride Comfort Koji Asano* Yasushi Kajitani* Aiming to improve of ride comfort, we have worked to overcome issues increasing Shinkansen speed including control of vertical and lateral
Design and evaluation of a serial elastic actuator for human assistance
 2013 XXIV International Conference on Information, Communication and Automation Technologies (ICAT) October 30 November 01, 2013, Sarajevo, Bosnia and Herzegovina Design and evaluation of a serial elastic
2013 XXIV International Conference on Information, Communication and Automation Technologies (ICAT) October 30 November 01, 2013, Sarajevo, Bosnia and Herzegovina Design and evaluation of a serial elastic
Modeling, Design and Simulation of Active Suspension System Frequency Response Controller using Automated Tuning Technique
 Modeling, Design and Simulation of Active Suspension System Frequency Response Controller using Automated Tuning Technique Omorodion Ikponwosa Ignatius Obinabo C.E Evbogbai M.J.E. Abstract Car suspension
Modeling, Design and Simulation of Active Suspension System Frequency Response Controller using Automated Tuning Technique Omorodion Ikponwosa Ignatius Obinabo C.E Evbogbai M.J.E. Abstract Car suspension
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics.
 Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Development of a Multibody Systems Model for Investigation of the Effects of Hybrid Electric Vehicle Powertrains on Vehicle Dynamics. http://dx.doi.org/10.3991/ijoe.v11i6.5033 Matthew Bastin* and R Peter
Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators. By: J. Islam & Tiffany Stephenson
 Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators By: J. Islam & Tiffany Stephenson Components That Enable A Robots Actions Effector: Device that makes impact/influence on
Arms, Legs, Wheels, Tracks and What Really Drives Them: Effectors and Actuators By: J. Islam & Tiffany Stephenson Components That Enable A Robots Actions Effector: Device that makes impact/influence on
University of Twente
 University of Twente FACULTY OF ELECTRICAL ENGINEERING, MATHEMATICS AND COMPUTER SCIENCE BACHELOR OF SCIENCE IN ADVANCED TECHNOLOGY Department of Robotics and Mechatronics BSC THESIS in SHERPA PROJECT
University of Twente FACULTY OF ELECTRICAL ENGINEERING, MATHEMATICS AND COMPUTER SCIENCE BACHELOR OF SCIENCE IN ADVANCED TECHNOLOGY Department of Robotics and Mechatronics BSC THESIS in SHERPA PROJECT
FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT
 FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT Antti MAKELA, Jouni MATTILA, Mikko SIUKO, Matti VILENIUS Institute of Hydraulics and Automation, Tampere University of Technology P.O.Box
FEASIBILITY STYDY OF CHAIN DRIVE IN WATER HYDRAULIC ROTARY JOINT Antti MAKELA, Jouni MATTILA, Mikko SIUKO, Matti VILENIUS Institute of Hydraulics and Automation, Tampere University of Technology P.O.Box
MECH S Homework Concept Synthesis Due 12 Feb 14
 MECH 3200 14S Homework Concept Synthesis Due 12 Feb 14 Veterinary Prosthetics Consider a canine front double amputee (i.e., hind legs intact, but fore legs gone humerus removed from the scapula). The owners
MECH 3200 14S Homework Concept Synthesis Due 12 Feb 14 Veterinary Prosthetics Consider a canine front double amputee (i.e., hind legs intact, but fore legs gone humerus removed from the scapula). The owners
THUMS User Community
 THUMS User Community Therese Fuchs, Biomechanics Group, Institute of Legal Medicine, University of Munich therese.fuchs@med.uni-muenchen.de, tel. +49 89 2180 73365 Munich, 9th of April 2014 Agenda 1. What
THUMS User Community Therese Fuchs, Biomechanics Group, Institute of Legal Medicine, University of Munich therese.fuchs@med.uni-muenchen.de, tel. +49 89 2180 73365 Munich, 9th of April 2014 Agenda 1. What
Design of Damping Base and Dynamic Analysis of Whole Vehicle Transportation based on Filtered White-Noise GongXue Zhang1,a and Ning Chen2,b,*
 Advances in Engineering Research (AER), volume 07 Global Conference on Mechanics and Civil Engineering (GCMCE 07) Design of Damping Base and Dynamic Analysis of Whole Vehicle Transportation based on Filtered
Advances in Engineering Research (AER), volume 07 Global Conference on Mechanics and Civil Engineering (GCMCE 07) Design of Damping Base and Dynamic Analysis of Whole Vehicle Transportation based on Filtered
Modification of IPG Driver for Road Robustness Applications
 Modification of IPG Driver for Road Robustness Applications Alexander Shawyer (BEng, MSc) Alex Bean (BEng, CEng. IMechE) SCS Analysis & Virtual Tools, Braking Development Jaguar Land Rover Introduction
Modification of IPG Driver for Road Robustness Applications Alexander Shawyer (BEng, MSc) Alex Bean (BEng, CEng. IMechE) SCS Analysis & Virtual Tools, Braking Development Jaguar Land Rover Introduction
Uncommon actuators in Robotic. Lukas Kopecny Brno University of Technology Czech Republic
 Uncommon actuators in Robotic Lukas Kopecny Brno University of Technology Czech Republic Why uncomon actuators? Common actuators Rigid Bulky (gearboxes) Problematic interaction Expensive Heavy Uncommon
Uncommon actuators in Robotic Lukas Kopecny Brno University of Technology Czech Republic Why uncomon actuators? Common actuators Rigid Bulky (gearboxes) Problematic interaction Expensive Heavy Uncommon
An Experimental Characterization of a 1-DOF Anthropomorphic Arm for Humanoid Robots
 Proceedings of the th WSEAS International Conference on SYSTEMS An Experimental Characterization of a -DOF Anthropomorphic Arm for Humanoid Robots HAO GU, MARCO CECCARELLI and GIUSEPPE CARBONE LARM: Laboratory
Proceedings of the th WSEAS International Conference on SYSTEMS An Experimental Characterization of a -DOF Anthropomorphic Arm for Humanoid Robots HAO GU, MARCO CECCARELLI and GIUSEPPE CARBONE LARM: Laboratory
Control of Mobile Robots
 Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control of Mobile Robots Introduction Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Applications of mobile autonomous robots
Control and Simulation of Semi-Active Suspension System using PID Controller for Automobiles under LABVIEW Simulink
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2017 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Control
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2017 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Control
Replace your belt, ball screw or rack and pinion mechanism with a simple and economical linear servo motor actuator
 LINEAR SERVO ECONO-SLIDE Ultimate Solution for High Throughput Precision Positioning Replace your belt, ball screw or rack and pinion mechanism with a simple and economical linear servo motor actuator
LINEAR SERVO ECONO-SLIDE Ultimate Solution for High Throughput Precision Positioning Replace your belt, ball screw or rack and pinion mechanism with a simple and economical linear servo motor actuator
Exploit of Shipping Auxiliary Swing Test Platform Jia WANG 1, a, Dao-hua LU 1 and Song-lian XIE 1
 Advanced Materials Research Online: 2013-10-07 ISSN: 1662-8985, Vol. 815, pp 821-826 doi:10.4028/www.scientific.net/amr.815.821 2013 Trans Tech Publications, Switzerland Exploit of Shipping Auxiliary Swing
Advanced Materials Research Online: 2013-10-07 ISSN: 1662-8985, Vol. 815, pp 821-826 doi:10.4028/www.scientific.net/amr.815.821 2013 Trans Tech Publications, Switzerland Exploit of Shipping Auxiliary Swing
Experimental Evaluation of a New Braking System for Use in Passive Haptic Displays
 Experimental Evaluation of a New Braking System for Use in Passive Haptic Displays S.Munir, L. Tognetti and W.J.Book George W.Woodruff School of Mechanical Engineering Georgia Institute Of Technology Atlanta,
Experimental Evaluation of a New Braking System for Use in Passive Haptic Displays S.Munir, L. Tognetti and W.J.Book George W.Woodruff School of Mechanical Engineering Georgia Institute Of Technology Atlanta,
Week 11. Module 5: EE100 Course Project Making your first robot
 Week 11 Module 5: EE100 Course Project Making your first robot Dr. Ing. Ahmad Kamal Nasir Office Hours: Room 9-245A Tuesday (1000-1100) Wednesday (1500-1600) Course Project: Wall-Follower Robot Week 1
Week 11 Module 5: EE100 Course Project Making your first robot Dr. Ing. Ahmad Kamal Nasir Office Hours: Room 9-245A Tuesday (1000-1100) Wednesday (1500-1600) Course Project: Wall-Follower Robot Week 1
MECHATRONICS LAB MANUAL
 MECHATRONICS LAB MANUAL T.E.(Mechanical) Sem-VI Department of Mechanical Engineering SIESGST, Nerul, Navi Mumbai LIST OF EXPERIMENTS Expt. No. Title Page No. 1. Study of basic principles of sensing and
MECHATRONICS LAB MANUAL T.E.(Mechanical) Sem-VI Department of Mechanical Engineering SIESGST, Nerul, Navi Mumbai LIST OF EXPERIMENTS Expt. No. Title Page No. 1. Study of basic principles of sensing and
Active Electrical Load Design for a Cluster POWER Rehabilitation System
 Active Electrical Load Design for a Cluster POWER Rehabilitation System Chung-Hsien Kuo Department of Electrical Engineering National Taiwan University of Science and Technology Email: chkuo@mail.ntust.edu.tw
Active Electrical Load Design for a Cluster POWER Rehabilitation System Chung-Hsien Kuo Department of Electrical Engineering National Taiwan University of Science and Technology Email: chkuo@mail.ntust.edu.tw
Modeling, Design and Simulation of Active Suspension System Root Locus Controller using Automated Tuning Technique.
 Modeling, Design and Simulation of Active Suspension System Root Locus Controller using Automated Tuning Technique. Omorodion Ikponwosa Ignatius Obinabo C.E Abstract Evbogbai M.J.E. Car suspension system
Modeling, Design and Simulation of Active Suspension System Root Locus Controller using Automated Tuning Technique. Omorodion Ikponwosa Ignatius Obinabo C.E Abstract Evbogbai M.J.E. Car suspension system
Reduction of Self Induced Vibration in Rotary Stirling Cycle Coolers
 Reduction of Self Induced Vibration in Rotary Stirling Cycle Coolers U. Bin-Nun FLIR Systems Inc. Boston, MA 01862 ABSTRACT Cryocooler self induced vibration is a major consideration in the design of IR
Reduction of Self Induced Vibration in Rotary Stirling Cycle Coolers U. Bin-Nun FLIR Systems Inc. Boston, MA 01862 ABSTRACT Cryocooler self induced vibration is a major consideration in the design of IR
SPMM OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000?
 SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
SPMM 5000 OUTLINE SPECIFICATION - SP20016 issue 2 WHAT IS THE SPMM 5000? The Suspension Parameter Measuring Machine (SPMM) is designed to measure the quasi-static suspension characteristics that are important
Huco Dynatork Flexible Couplings
 Huco Dynatork Flexible Couplings Flexible Couplings The Company & Its Products Huco products are manufactured in Hertford, England, in a modern plant equipped with all necessary design, development, toolroom
Huco Dynatork Flexible Couplings Flexible Couplings The Company & Its Products Huco products are manufactured in Hertford, England, in a modern plant equipped with all necessary design, development, toolroom
Simulation and Analysis of Vehicle Suspension System for Different Road Profile
 Simulation and Analysis of Vehicle Suspension System for Different Road Profile P.Senthil kumar 1 K.Sivakumar 2 R.Kalidas 3 1 Assistant professor, 2 Professor & Head, 3 Student Department of Mechanical
Simulation and Analysis of Vehicle Suspension System for Different Road Profile P.Senthil kumar 1 K.Sivakumar 2 R.Kalidas 3 1 Assistant professor, 2 Professor & Head, 3 Student Department of Mechanical
Mathematical Modelling and Simulation Of Semi- Active Suspension System For An 8 8 Armoured Wheeled Vehicle With 11 DOF
 Mathematical Modelling and Simulation Of Semi- Active Suspension System For An 8 8 Armoured Wheeled Vehicle With 11 DOF Sujithkumar M Sc C, V V Jagirdar Sc D and MW Trikande Sc G VRDE, Ahmednagar Maharashtra-414006,
Mathematical Modelling and Simulation Of Semi- Active Suspension System For An 8 8 Armoured Wheeled Vehicle With 11 DOF Sujithkumar M Sc C, V V Jagirdar Sc D and MW Trikande Sc G VRDE, Ahmednagar Maharashtra-414006,
a 200 ω (rpm) τ (Nm)
 τ (Nm)") Quadruped Robot Running With a Bounding Gait S. Talebi 1 I. Poulakakis 1 E. Papadopoulos 2 M. Buehler 1 1 Ambulatory Robotics Laboratory, http://www.mcgill.cim.ca/οarlweb Centre for Intelligent Machines,
Quadruped Robot Running With a Bounding Gait S. Talebi 1 I. Poulakakis 1 E. Papadopoulos 2 M. Buehler 1 1 Ambulatory Robotics Laboratory, http://www.mcgill.cim.ca/οarlweb Centre for Intelligent Machines,
Comparing PID and Fuzzy Logic Control a Quarter Car Suspension System
 Nemat Changizi, Modjtaba Rouhani/ TJMCS Vol.2 No.3 (211) 559-564 The Journal of Mathematics and Computer Science Available online at http://www.tjmcs.com The Journal of Mathematics and Computer Science
Nemat Changizi, Modjtaba Rouhani/ TJMCS Vol.2 No.3 (211) 559-564 The Journal of Mathematics and Computer Science Available online at http://www.tjmcs.com The Journal of Mathematics and Computer Science
PRODUCTS OVERVIEW. Linear Motion in its Simplest Form
 Linear Motion in its Simplest Form Simplicity of Design - IntelLiDrives TM produce direct linear motion, eliminating stretching belts, slipping pulleys, hysteresis and wear of the leadscrews. Cost Effective
Linear Motion in its Simplest Form Simplicity of Design - IntelLiDrives TM produce direct linear motion, eliminating stretching belts, slipping pulleys, hysteresis and wear of the leadscrews. Cost Effective
L15 Dynamics & Vibration Laboratory
 LABORATORY PLANNING GUIDE L15 Dynamics & Vibration Laboratory Content Covered subjects according to the curriculum... 2 Main concept... 3 Initial training provided for laboratory personnel... 3 Requirements
LABORATORY PLANNING GUIDE L15 Dynamics & Vibration Laboratory Content Covered subjects according to the curriculum... 2 Main concept... 3 Initial training provided for laboratory personnel... 3 Requirements
Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity
 Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity Benoit PARMENTIER, Frederic MONNERIE (PSA) Marc ALIRAND, Julien LAGNIER (LMS) Vehicle Dynamics
Vehicle functional design from PSA in-house software to AMESim standard library with increased modularity Benoit PARMENTIER, Frederic MONNERIE (PSA) Marc ALIRAND, Julien LAGNIER (LMS) Vehicle Dynamics
ENERGY RECOVERY SYSTEM FROM THE VEHICLE DAMPERS AND THE INFLUENCE OF THE TANK PRESSURE
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania ENERGY RECOVERY SYSTEM FROM THE VEHICLE DAMPERS AND THE INFLUENCE OF THE
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania ENERGY RECOVERY SYSTEM FROM THE VEHICLE DAMPERS AND THE INFLUENCE OF THE
Synthesis and Design of a Bimodal Rotary Series Elastic Actuator
 Synthesis and Design of a Bimodal Rotary Series Elastic Actuator Graham Allen Day Thesis submitted to the faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the
Synthesis and Design of a Bimodal Rotary Series Elastic Actuator Graham Allen Day Thesis submitted to the faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the
Project 16MA1: Efficient, Integrated, Freeform Flexible Hydraulic Actuators
 Georgia Institute of Technology Marquette University Milwaukee School of Engineering North Carolina A&T State University Purdue University University of California, Merced University of Illinois, Urbana-Champaign
Georgia Institute of Technology Marquette University Milwaukee School of Engineering North Carolina A&T State University Purdue University University of California, Merced University of Illinois, Urbana-Champaign
THE APPLICATION OF SERIES ELASTIC ACTUATORS IN THE HYDRAULIC ANKLE-FOOT ORTHOSIS
 Proceedings of the 2018 Design of Medical Devices Conference DMD2018 April 9-12, 2018, Minneapolis, MN, USA DMD2018-6822 THE APPLICATION OF SERIES ELASTIC ACTUATORS IN THE HYDRAULIC ANKLE-FOOT ORTHOSIS
Proceedings of the 2018 Design of Medical Devices Conference DMD2018 April 9-12, 2018, Minneapolis, MN, USA DMD2018-6822 THE APPLICATION OF SERIES ELASTIC ACTUATORS IN THE HYDRAULIC ANKLE-FOOT ORTHOSIS
Stopping Accuracy of Brushless
 Stopping Accuracy of Brushless Features of the High Rigidity Type DGII Series Hollow Rotary Actuator The DGII Series hollow rotary actuator was developed for positioning applications such as rotating a
Stopping Accuracy of Brushless Features of the High Rigidity Type DGII Series Hollow Rotary Actuator The DGII Series hollow rotary actuator was developed for positioning applications such as rotating a
Investigating two-wheeler balance using experimental bicycles and simulators
 Investigating two-wheeler balance using experimental bicycles and simulators George Dialynas 1, Oliver Lee 1, Riender Happee 1, Arend Schwab 1 Francesco Celiberti 2, Marco Grottoli 2 TU Delft 1, Netherlands
Investigating two-wheeler balance using experimental bicycles and simulators George Dialynas 1, Oliver Lee 1, Riender Happee 1, Arend Schwab 1 Francesco Celiberti 2, Marco Grottoli 2 TU Delft 1, Netherlands
Courtesy of Steven Engineering, Inc - (800) PATENTED
 PATENTED") PRECISION RING DRIVE SYSTEMS Based on Nexen s innovative Roller Pinion technology, Nexen Ring Drive Systems come complete with a precision grade, high capacity bearing and drive mechanism in a rigid housing.
PRECISION RING DRIVE SYSTEMS Based on Nexen s innovative Roller Pinion technology, Nexen Ring Drive Systems come complete with a precision grade, high capacity bearing and drive mechanism in a rigid housing.
Higher, Faster, Further. damping control for turntable ladders. dspace Magazine 2/2009 dspace GmbH, Paderborn, Germany
 PAGE 30 Universität Stuttgart / IVECO magirus Higher, Faster, Further Active damping control for turntable ladders PAGE 31 Turntable ladders nowadays are required to go higher, faster, further and be safer.
PAGE 30 Universität Stuttgart / IVECO magirus Higher, Faster, Further Active damping control for turntable ladders PAGE 31 Turntable ladders nowadays are required to go higher, faster, further and be safer.
High Speed Automation
 Gantry Robot Systems and Linear Modules zla0 For high speed automation, both gantry and articulated arm robots are widely used throughout industry. Because of the many inherent advantages of the gantry
Gantry Robot Systems and Linear Modules zla0 For high speed automation, both gantry and articulated arm robots are widely used throughout industry. Because of the many inherent advantages of the gantry
Suspension systems and components
 Suspension systems and components 2of 42 Objectives To provide good ride and handling performance vertical compliance providing chassis isolation ensuring that the wheels follow the road profile very little
Suspension systems and components 2of 42 Objectives To provide good ride and handling performance vertical compliance providing chassis isolation ensuring that the wheels follow the road profile very little
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE500-350HL Hexapods and Robotics HexGen HE500-350HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 110 mm and angular travels to 40 Precision design
HexGen HE500-350HL Hexapods and Robotics HexGen HE500-350HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 110 mm and angular travels to 40 Precision design
BMVSS Knee a low-cost passive prosthesis to replicate able-bodied motion
 BMVSS Knee a low-cost passive prosthesis to replicate able-bodied motion Molly Berringer, Paige Boehmcke, Jason Fischman, Athena Huang, Danny Joh, Cali Warner Mentor: Murthy Arelekatti May, 2, 2017 Final
BMVSS Knee a low-cost passive prosthesis to replicate able-bodied motion Molly Berringer, Paige Boehmcke, Jason Fischman, Athena Huang, Danny Joh, Cali Warner Mentor: Murthy Arelekatti May, 2, 2017 Final
Wrist and Forearm Rotation of the DLR Hand Arm System: Mechanical Design, Shape Analysis and Experimental Validation
 2011 lrsj nternational Conference on ntelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Wrist and Forearm Rotation of the DLR Hand Arm System: Mechanical Design, Shape Analysis
2011 lrsj nternational Conference on ntelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Wrist and Forearm Rotation of the DLR Hand Arm System: Mechanical Design, Shape Analysis
Towards a maximally-robust self-balancing robotic bicycle without reaction-moment gyroscopes nor reaction wheels
 Towards a maximally-robust self-balancing robotic bicycle without reaction-moment gyroscopes nor reaction wheels Arundathi Sharma, Shihao Wang, Yu Meng Zhou, etc, (students) Andy Ruina (project advisor)
Towards a maximally-robust self-balancing robotic bicycle without reaction-moment gyroscopes nor reaction wheels Arundathi Sharma, Shihao Wang, Yu Meng Zhou, etc, (students) Andy Ruina (project advisor)
Control of a Multi Function Wheelchair for Disabled/Elderly Mobility
 Control of a Multi Function Wheelchair for Disabled/Elderly Mobility Nor Maniha Abdul Ghani Dr. Osman Tokhi Department of Automatic Control and Systems Engineering The University of Sheffield Introduction/Problems
Control of a Multi Function Wheelchair for Disabled/Elderly Mobility Nor Maniha Abdul Ghani Dr. Osman Tokhi Department of Automatic Control and Systems Engineering The University of Sheffield Introduction/Problems
Direct Drive Rotary An Increasingly Attractive Servo Choice
 Direct Drive Rotary An Increasingly Attractive Servo Choice DDR systems are available in frameless, housed and the newly developed Cartridge motor format. While many engineers are familiar with the basics
Direct Drive Rotary An Increasingly Attractive Servo Choice DDR systems are available in frameless, housed and the newly developed Cartridge motor format. While many engineers are familiar with the basics
Journal of Advanced Mechanical Design, Systems, and Manufacturing
 Pneumatic Valve Operated by Multiplex Pneumatic Transmission * Yasutaka NISHIOKA **, Koichi SUZUMORI **, Takefumi KANDA ** and Shuichi WAKIMOTO ** **Department of Natural Science and Technology, Okayama
Pneumatic Valve Operated by Multiplex Pneumatic Transmission * Yasutaka NISHIOKA **, Koichi SUZUMORI **, Takefumi KANDA ** and Shuichi WAKIMOTO ** **Department of Natural Science and Technology, Okayama
DEVELOPMENT ENVIRONMENT FOR HAPTIC FEEDBACK DEVICE ON MOBILE AGRICULTURAL EQUIPMENT
 Sustainable Construction and Design 211 DEVELOPMENT ENVIRONMENT FOR HAPTIC FEEDBACK DEVICE ON MOBILE AGRICULTURAL EQUIPMENT L. Jánosi, J. Kis Institute for Mechanical Engineering Technology, Faculty of
Sustainable Construction and Design 211 DEVELOPMENT ENVIRONMENT FOR HAPTIC FEEDBACK DEVICE ON MOBILE AGRICULTURAL EQUIPMENT L. Jánosi, J. Kis Institute for Mechanical Engineering Technology, Faculty of
KINEMATICAL SUSPENSION OPTIMIZATION USING DESIGN OF EXPERIMENT METHOD
 Jurnal Mekanikal June 2014, No 37, 16-25 KINEMATICAL SUSPENSION OPTIMIZATION USING DESIGN OF EXPERIMENT METHOD Mohd Awaluddin A Rahman and Afandi Dzakaria Faculty of Mechanical Engineering, Universiti
Jurnal Mekanikal June 2014, No 37, 16-25 KINEMATICAL SUSPENSION OPTIMIZATION USING DESIGN OF EXPERIMENT METHOD Mohd Awaluddin A Rahman and Afandi Dzakaria Faculty of Mechanical Engineering, Universiti
Robust Stability Analysis: a Tool to Assess the Impact of Biodynamic Feedthrough on Rotorcraft
 Robust Stability Analysis: a Tool to Assess the Impact of Biodynamic Feedthrough on Rotorcraft G. Quaranta1, P. Masarati1, J. Venrooij2,3 Dipartimento di Ingegneria Aerospaziale, Politecnico di Milano,
Robust Stability Analysis: a Tool to Assess the Impact of Biodynamic Feedthrough on Rotorcraft G. Quaranta1, P. Masarati1, J. Venrooij2,3 Dipartimento di Ingegneria Aerospaziale, Politecnico di Milano,
ACTIVE AXIAL ELECTROMAGNETIC DAMPER
 ACTIVE AXIAL ELECTROMAGNETIC DAMPER Alexei V. Filatov, Larry A. Hawkins Calnetix Inc., Cerritos, CA, 973, USA afilatov@calnetix.com Venky Krishnan, Bryan Lam Direct Drive Systems Inc., Cerritos, CA, 973,
ACTIVE AXIAL ELECTROMAGNETIC DAMPER Alexei V. Filatov, Larry A. Hawkins Calnetix Inc., Cerritos, CA, 973, USA afilatov@calnetix.com Venky Krishnan, Bryan Lam Direct Drive Systems Inc., Cerritos, CA, 973,
Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators
 Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators Lisa Peacocke, Paul Bruce and Matthew Santer International Planetary Probe Workshop 11-15 June 2018 Boulder, CO,
Coupled Aero-Structural Modelling and Optimisation of Deployable Mars Aero-Decelerators Lisa Peacocke, Paul Bruce and Matthew Santer International Planetary Probe Workshop 11-15 June 2018 Boulder, CO,
III B.Tech I Semester Supplementary Examinations, May/June
 Set No. 1 III B.Tech I Semester Supplementary Examinations, May/June - 2015 1 a) Derive the expression for Gyroscopic Couple? b) A disc with radius of gyration of 60mm and a mass of 4kg is mounted centrally
Set No. 1 III B.Tech I Semester Supplementary Examinations, May/June - 2015 1 a) Derive the expression for Gyroscopic Couple? b) A disc with radius of gyration of 60mm and a mass of 4kg is mounted centrally
Control of a Coaxial Helicopter with Center of Gravity Steering
 Control of a Coaxial Helicopter with Center of Gravity Steering Christian Bermes, Kevin Sartori, Dario Schafroth, Samir Bouabdallah, and Roland Siegwart {bermesc,ksartori,sdario,samirbo,rsiegwart}@ethz.ch
Control of a Coaxial Helicopter with Center of Gravity Steering Christian Bermes, Kevin Sartori, Dario Schafroth, Samir Bouabdallah, and Roland Siegwart {bermesc,ksartori,sdario,samirbo,rsiegwart}@ethz.ch
R10 Set No: 1 ''' ' '' '' '' Code No: R31033
 R10 Set No: 1 III B.Tech. I Semester Regular and Supplementary Examinations, December - 2013 DYNAMICS OF MACHINERY (Common to Mechanical Engineering and Automobile Engineering) Time: 3 Hours Max Marks:
R10 Set No: 1 III B.Tech. I Semester Regular and Supplementary Examinations, December - 2013 DYNAMICS OF MACHINERY (Common to Mechanical Engineering and Automobile Engineering) Time: 3 Hours Max Marks:
What did we learn from Darpa Robotics Challenge
 Keynote speech/icra, Hamburg, Germany, Sep.. 2015 What did we learn from Darpa Robotics Challenge Jun Ho Oh Professor of Mechanical Engineering Director of Humanoid Robot Research Center KAIST DARPA Robotics
Keynote speech/icra, Hamburg, Germany, Sep.. 2015 What did we learn from Darpa Robotics Challenge Jun Ho Oh Professor of Mechanical Engineering Director of Humanoid Robot Research Center KAIST DARPA Robotics
Forced vibration frequency response for a permanent magnetic planetary gear
 Forced vibration frequency response for a permanent magnetic planetary gear Xuejun Zhu 1, Xiuhong Hao 2, Minggui Qu 3 1 Hebei Provincial Key Laboratory of Parallel Robot and Mechatronic System, Yanshan
Forced vibration frequency response for a permanent magnetic planetary gear Xuejun Zhu 1, Xiuhong Hao 2, Minggui Qu 3 1 Hebei Provincial Key Laboratory of Parallel Robot and Mechatronic System, Yanshan
J.D ENGINEERING WORKS
 P O W E R G E N E R A T I O N About Us J. Engineering works, Manufacture Permanent Magnet Generators, AC Alternators,BLC MOTORS, Electric Motors, PMG Wind & Hydro Turbine. Mr. Gurdavinder Singh, Founder
P O W E R G E N E R A T I O N About Us J. Engineering works, Manufacture Permanent Magnet Generators, AC Alternators,BLC MOTORS, Electric Motors, PMG Wind & Hydro Turbine. Mr. Gurdavinder Singh, Founder
Unidirectional variable stiffness hydraulic actuator for load-carrying knee exoskeleton
 Research Article Unidirectional variable stiffness hydraulic actuator for load-carrying knee exoskeleton International Journal of Advanced Robotic Systems January-February 2017: 1 12 ª The Author(s) 2017
Research Article Unidirectional variable stiffness hydraulic actuator for load-carrying knee exoskeleton International Journal of Advanced Robotic Systems January-February 2017: 1 12 ª The Author(s) 2017
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Rotary Tables. Z Theta system
 Rotary Tables High force Air bearings Roller bearings XY tables Z Theta system Cartesian systems Linear stepping motors and systems Linear brushless motors and systems Linear measurement systems Semiconductor/Electronics
Rotary Tables High force Air bearings Roller bearings XY tables Z Theta system Cartesian systems Linear stepping motors and systems Linear brushless motors and systems Linear measurement systems Semiconductor/Electronics
ServoRings TM - integrated rotary tables with high torque servo ring motor, high resolution ring encoder and high accuracy ring bearing
 ServoRings TM - integrated rotary tables with high torque servo ring motor, high resolution ring encoder and high accuracy ring bearing Operating principle ServoRing TM rotary tables use segmented three
ServoRings TM - integrated rotary tables with high torque servo ring motor, high resolution ring encoder and high accuracy ring bearing Operating principle ServoRing TM rotary tables use segmented three
Passive Vibration Reduction with Silicone Springs and Dynamic Absorber
 Available online at www.sciencedirect.com Physics Procedia 19 (2011 ) 431 435 International Conference on Optics in Precision Engineering and Nanotechnology 2011 Passive Vibration Reduction with Silicone
Available online at www.sciencedirect.com Physics Procedia 19 (2011 ) 431 435 International Conference on Optics in Precision Engineering and Nanotechnology 2011 Passive Vibration Reduction with Silicone
Multi-Body Simulation of Powertrain Acoustics in the Full Vehicle Development
 Page 1 Multi-Body Simulation of Powertrain Acoustics in the Full Vehicle Development SIMPACK User Meeting 2011 Alexander Schmid, IABG mbh Andreas Raith, BMW Group Salzburg, Page 2 Powertrain Acoustics
Page 1 Multi-Body Simulation of Powertrain Acoustics in the Full Vehicle Development SIMPACK User Meeting 2011 Alexander Schmid, IABG mbh Andreas Raith, BMW Group Salzburg, Page 2 Powertrain Acoustics
Exoskeleton Robot DesignBased on Multi-body Dynamics Simulation
 Exoskeleton Robot DesignBased on Multi-body Dynamics Simulation Chao Wang a, Guozhu Duan, Jie Xiao China North Vehicle Research Institute Beijing, China acwang21@163.com Abstract In order to implement
Exoskeleton Robot DesignBased on Multi-body Dynamics Simulation Chao Wang a, Guozhu Duan, Jie Xiao China North Vehicle Research Institute Beijing, China acwang21@163.com Abstract In order to implement
Robotic Wheel Loading Process in Automotive Manufacturing Automation
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Robotic Wheel Loading Process in Automotive Manufacturing Automation Heping Chen, William
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Robotic Wheel Loading Process in Automotive Manufacturing Automation Heping Chen, William
Below, you can see the warning symbols used throughout the manual and their meaning.
 FMI60201 Frameless motors INTRODUCTION FMI-series frameless motors by Rozum Robotics are designed to provide motion as part of a motion system. Available in a range of sizes (dia. 40, 50, 60, 75 mm), FMI
FMI60201 Frameless motors INTRODUCTION FMI-series frameless motors by Rozum Robotics are designed to provide motion as part of a motion system. Available in a range of sizes (dia. 40, 50, 60, 75 mm), FMI
TRACTION CONTROL OF AN ELECTRIC FORMULA STUDENT RACING CAR
 F24-IVC-92 TRACTION CONTROL OF AN ELECTRIC FORMULA STUDENT RACING CAR Loof, Jan * ; Besselink, Igo; Nijmeijer, Henk Department of Mechanical Engineering, Eindhoven, University of Technology, KEYWORDS Traction-control,
F24-IVC-92 TRACTION CONTROL OF AN ELECTRIC FORMULA STUDENT RACING CAR Loof, Jan * ; Besselink, Igo; Nijmeijer, Henk Department of Mechanical Engineering, Eindhoven, University of Technology, KEYWORDS Traction-control,
Last week we saw. Today: The Role of Locomotion : Robotics systems and science Lecture 4: Locomotion
 6.141: Robotics systems and science Lecture 4: Locomotion Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2009 Last week we saw Bang-bang control Open loop control Closed loop control: P, I, D Motors
6.141: Robotics systems and science Lecture 4: Locomotion Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2009 Last week we saw Bang-bang control Open loop control Closed loop control: P, I, D Motors
The MathWorks Crossover to Model-Based Design
 The MathWorks Crossover to Model-Based Design The Ohio State University Kerem Koprubasi, Ph.D. Candidate Mechanical Engineering The 2008 Challenge X Competition Benefits of MathWorks Tools Model-based
The MathWorks Crossover to Model-Based Design The Ohio State University Kerem Koprubasi, Ph.D. Candidate Mechanical Engineering The 2008 Challenge X Competition Benefits of MathWorks Tools Model-based
Steering performance of an inverted pendulum vehicle with pedals as a personal mobility vehicle
 THEORETICAL & APPLIED MECHANICS LETTERS 3, 139 (213) Steering performance of an inverted pendulum vehicle with pedals as a personal mobility vehicle Chihiro Nakagawa, 1, a) Kimihiko Nakano, 2, b) Yoshihiro
THEORETICAL & APPLIED MECHANICS LETTERS 3, 139 (213) Steering performance of an inverted pendulum vehicle with pedals as a personal mobility vehicle Chihiro Nakagawa, 1, a) Kimihiko Nakano, 2, b) Yoshihiro