After Kickoff, we immediately began the design process by reviewing the game rules with the entire team. During this step, we also looked over the
|
|
|
- Emma Fowler
- 6 years ago
- Views:
Transcription


1
2 After Kickoff, we immediately began the design process by reviewing the game rules with the entire team. During this step, we also looked over the field specifications. We continued development by determining primary functional objectives for the machine. These were determined by analyzing cost and benefits of game tasks relative to point value. Simulated matches, with team members as the robots, provided valuable insight into timing and potential gameplay. Some of the primary functional objectives that were derived from these discussions included:

3 During week one, we were able to hold brainstorming sessions in Chrysler's Innovation Space. Widespread availability of projectors and whiteboard allowed students and mentors to convey design concepts and ideas to the entire team. At this time, a list of functional objectives was compiled for the machine. The CAD process also began in this space, which allowed for younger students and mentors to easily collaborate on the design process. Mentors and students began the prototyping process in various sections, such as the catapult, catapult release, collector, catching mechanisms, and chassis.


4 The chassis is a key part of the design of our robot. Our chassis is designed for optimal acceleration and quick field maneuverability. We chose a 4 wheel omnidirectional drive train, inspired by FRC Team 148 (2013) and Build Blitz s Team JVN. The omnidrive is lighter, more efficient, has little turning scrub, is difficult to play defense on and requires less torsional stiffness.

5 In order to develop an effective catching mechanism, we built a kit bot chassis with a large catcher that funnelled the ball into a spot as low on the robot as possible. We came to the conclusion that in order to catch the ball more accurately and securely, we would need pivoting wings. In addition, we recognized the need to stabilize the ball as it sat in the catapult cradle, especially when the collector was down. A hoop of fiberglass rod, activated by two pistons, clamps the ball and secures it in the cradle.



6 Height: 59 Deploys quickly to catch balls and minimize bounce-outs String pulley system slaves the side and back panels together 550 paracord x4 4 pistons open/close wings Bungee attached to the collector assists pneumatics. x2 5/8 fiberglass rods help contain the ball before it settles.


7 Functional objectives for the collector included the ability to collect while moving, gently pass the ball to another robot, collect balls that approach the robot at angles, and serve as part of our catching apparatus. Initial prototypes experimented with both straight and bent-arm models. The bent-arm model proved to be most effective for collecting balls approaching from the sides. The team worked to find the optimal roller height for collecting from both sides and front of the robot and the optimal angle for the bend in the arm. In addition to arm structure, prototypes tested various roller and wheel surfaces. Both 4 and 2 wheels had difficulty collecting balls from the side. A continuous PVC roller with anti-abrasion gum rubber covering was most effective.


8 x2 AndyMark 9015 motors Cimulator gearbox Belt & pulley reduction leads to 9:1 final drive Abrasion-Resistant Gum Rubber Tubing covers front PVC roller x2 5 pneumatic pistons Welded, angled collector arm aids ball pickup from multiple directions


9 At the beginning of the season, we established multiple objectives for the catapult, such as being able to make a short shot and a full court pass. Throughout the prototyping process, it became apparent that we needed more spring force than we had immediately available. In order to achieve the spring forces we needed, we used extension springs, surgical tubing, and even a large compression spring. We discovered that cradling the ball to its circumference provided the most consistent flight path. We also found that a seatbelt would not stretch over time and would be a reliable upstop.

")
10 Spring tensioner: CIM with VEXpro Versa Planetary Gearbox Gear Ratio: 60:1 x6 springs, total of approx. 900 lbs of spring force x2 18 lbs/in large springs x4 9 lbs/in medium springs Rollover choo-choo cam w/ interlocking flail/hub design final drive: 160:1 ratio CIM with Dewalt transmission: bi-directional roller clutch prevents backdriving Custom bearing from flail to crank, maximizes torsional rigidity Optimization of thrust faces (gearbox face for crank, crank for flail) Dyneema cord: 8000 lb load


11 Placement of crio, PD board, and Talons was rendered in CAD prior to assembly. x8 Talons x1 release motor, x1 tensioner motor, x4 drivetrain motors, x2 collector motors x1 Spike (On-board compressor) Pneumatics are integral to our design. They are optimized for all mechanisms on the robot to provide quick actuation for catching, collecting, and shot selection. x2 5 Pistons (Collector) x2 4 Pistons (catching) x2 2 Pistons (ball clamp)



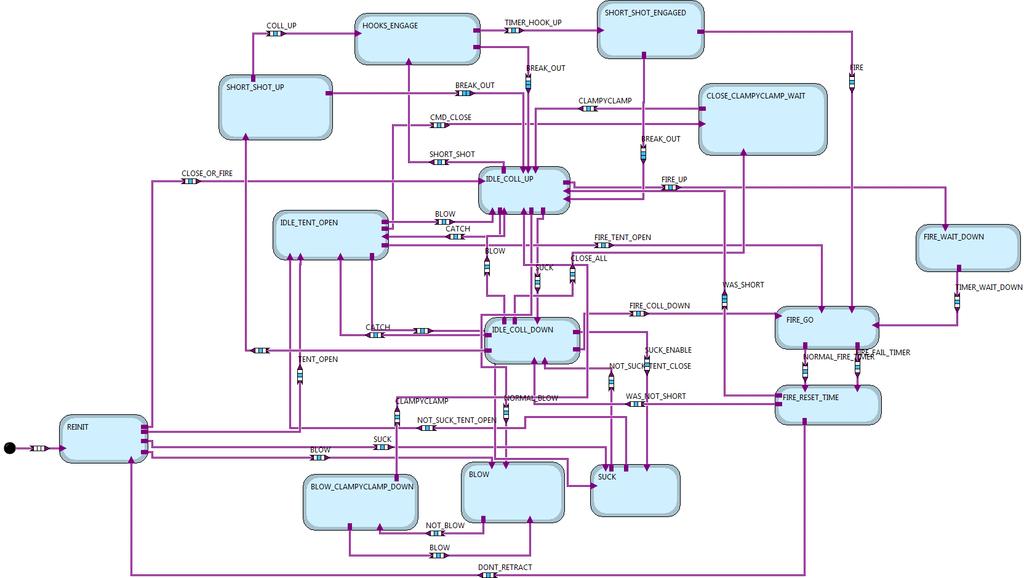
12 Absolute encoder used to detect angular position of rollover cam (choo choo) Optical sensor mounted on the front of the catapult z-frame used for ball detection Spring potentiometer used to calibrate spring tension Limit switch to detect collector state x2 VEX Optical Shaft Encoders mounted on 2 VEX omni wheels used as follower wheels for encoders Choo Choo: Manual Control Long Shot Shoot 18 ft Ball Clamp Spring Tension: Manual Control Shoot The state machine manages all robot operations, aside from the drive train. This allows for complex interactions between the various subsystems to be easily coordinated within the programming. Short Shot Quick Turn Throttle Turn

13
Introduction: Problem statement
 Introduction: Problem statement The goal of this project is to develop a catapult system that can be used to throw a squash ball the farthest distance and to be able to have some degree of accuracy with
Introduction: Problem statement The goal of this project is to develop a catapult system that can be used to throw a squash ball the farthest distance and to be able to have some degree of accuracy with
Issaquah Robotics Society 1318 Issaquah High School - Washington. Engineering Notebook 2018 Season
 Issaquah Robotics Society 1318 Issaquah High School - Washington Engineering Notebook 2018 Season Table of Contents 1. Engineering Story 2. Our Product Cycle 3. The Game Summary Tasks & Points 4. Strategy
Issaquah Robotics Society 1318 Issaquah High School - Washington Engineering Notebook 2018 Season Table of Contents 1. Engineering Story 2. Our Product Cycle 3. The Game Summary Tasks & Points 4. Strategy
Manipulators for FIRST FRC Robotics
 Manipulators for FIRST FRC Robotics FIRST Fare 2017 Bruce Whitefield Mentor, Team 2471 Manipulate What? Game pieces come in many sizes and shapes Manipulate How? Game objectives change each year Lift Dump
Manipulators for FIRST FRC Robotics FIRST Fare 2017 Bruce Whitefield Mentor, Team 2471 Manipulate What? Game pieces come in many sizes and shapes Manipulate How? Game objectives change each year Lift Dump
F.I.R.S.T. Robotic Drive Base
 F.I.R.S.T. Robotic Drive Base Design Team Shane Lentini, Jose Orozco, Henry Sick, Rich Phelan Design Advisor Prof. Sinan Muftu Abstract F.I.R.S.T. is an organization dedicated to inspiring and teaching
F.I.R.S.T. Robotic Drive Base Design Team Shane Lentini, Jose Orozco, Henry Sick, Rich Phelan Design Advisor Prof. Sinan Muftu Abstract F.I.R.S.T. is an organization dedicated to inspiring and teaching
Cyber Blue FRC 234 FRC 775 Motor Testing WCP 775Pro and AM775 December, 2017
 Cyber Blue FRC 234 FRC 775 Motor Testing WCP 775Pro and AM775 December, 2017 Background In the summer and fall of 2017, Cyber Blue completed a series of FRC motor tests to compare several performance characteristics.
Cyber Blue FRC 234 FRC 775 Motor Testing WCP 775Pro and AM775 December, 2017 Background In the summer and fall of 2017, Cyber Blue completed a series of FRC motor tests to compare several performance characteristics.
Build Season Overview Nabeel Peshimam October 27 th, 2014
 Build Season Overview Nabeel Peshimam October 27 th, 2014 ! Two Robots?!! Documentation! Subteam Division! Kickoff! Game Analysis! Priority List! Weeks 1-4! Concept Design! Prototyping! Design Freezes!!
Build Season Overview Nabeel Peshimam October 27 th, 2014 ! Two Robots?!! Documentation! Subteam Division! Kickoff! Game Analysis! Priority List! Weeks 1-4! Concept Design! Prototyping! Design Freezes!!
Manipulators. Basic/Background Info Types of Manipulators General Manipulator design tips
 FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
FTC Manipulators By: Zach Zakfeld (Enigma Robotics) Teams: FTC 5391, FTC 5385 and FRC 2075 *Some images in this presentation are of FRC robots so exact designs may not be applicable, however all of the
Swerve Drive Selection Process. Cyber Blue 234 OCTOBER 2010 / Indiana Forums
 Swerve Drive Selection Process Cyber Blue 234 OCTOBER 2010 / Indiana Forums Background Cyber Blue had discussed wanting to try an omni-directional drive system for many years Recognized need for a lot
Swerve Drive Selection Process Cyber Blue 234 OCTOBER 2010 / Indiana Forums Background Cyber Blue had discussed wanting to try an omni-directional drive system for many years Recognized need for a lot
Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc Championship Woodie Flowers Award
 President and Co-owner: AndyMark, Inc Championship Woodie Flowers Award") Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc. 2003 Championship Woodie Flowers Award Articulating Arms Telescoping Lifts Grippers Latches Turrets Ball Handling
Andy Baker Mech. Engineering Mentor: 45 (1998-present) President and Co-owner: AndyMark, Inc. 2003 Championship Woodie Flowers Award Articulating Arms Telescoping Lifts Grippers Latches Turrets Ball Handling
Drive Essentials. robot. -Andy Baker
 Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
Drive Essentials The best drive train is more important than anything else on the robot meets your strategy goals can be built with your resources rarely needs maintenance can be fixed within 4 minutes
2017 FLYSET FTC Workshop. Hosted by
 2017 FLYSET FTC Workshop Hosted by Hardware Topics Session Evan / Abhishek contributed by Austin / Derek Melody / Audrey from FTC team #12810 Agenda Harvester mechanism comparison Shooter mechanism comparison
2017 FLYSET FTC Workshop Hosted by Hardware Topics Session Evan / Abhishek contributed by Austin / Derek Melody / Audrey from FTC team #12810 Agenda Harvester mechanism comparison Shooter mechanism comparison
Drive Systems. Steve Shade October 26, 2013
 Steve Shade October 26, 2013 Introduction Steve Shade 15 year veteran Chesapeake Team Development Lead Chesapeake Head Referee Senior Controls and Simulation Engineer for Rolls-Royce Marine North America
Steve Shade October 26, 2013 Introduction Steve Shade 15 year veteran Chesapeake Team Development Lead Chesapeake Head Referee Senior Controls and Simulation Engineer for Rolls-Royce Marine North America
Browncoats Team 7842 Engineering Notebook
 2018-2019 Team Getting to know the Browncoats Team Summary................................................... 1-2 Member Introductions.............................................. 3-5 Mentor Introductions...............................................
2018-2019 Team Getting to know the Browncoats Team Summary................................................... 1-2 Member Introductions.............................................. 3-5 Mentor Introductions...............................................
Technical Robustness and Quality
 Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
Technical Robustness and Quality www.teamrush27.net Rock Solid Robot Page Title 1-4 Robustness In Concept And Fabrication 5 Creative Concepts For Tomorrow s Technology 6-8 Rock Solid Controls 9-10 Effectively
High Tech High Top Hat Technicians. Gearbox Design as Seen Through the Toughbox. Gear Up
 High Tech High Top Hat Technicians Gearbox Design as Seen Through the Toughbox Or Gear Up Toughbox Gear Pairs Diametral Pitch (DP): 20 per inch Pressure angle: 14.5 degrees Gear Teeth 14 50 16 48 19 45
High Tech High Top Hat Technicians Gearbox Design as Seen Through the Toughbox Or Gear Up Toughbox Gear Pairs Diametral Pitch (DP): 20 per inch Pressure angle: 14.5 degrees Gear Teeth 14 50 16 48 19 45
VEX Classroom Lab Kit to PLTW VEX POE Conversion Kit
 Published: 03/22/20 Picture Part Description Number 275-88 Rack Gearbox Bracket (2-pack): Combines with the VEX linear slides & Rack Gears to create a linear actuator. Quantity 276-096 Linear Slide (2-pack):
Published: 03/22/20 Picture Part Description Number 275-88 Rack Gearbox Bracket (2-pack): Combines with the VEX linear slides & Rack Gears to create a linear actuator. Quantity 276-096 Linear Slide (2-pack):
Unit 1 Introduction to VEX and Robotics
 Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
Unit Overview Unit 1 Introduction to VEX and Robotics VEX lab kits bring robotics into the classroom, making it a fun and educational experience for all. In this introductory unit, you review the kit and
The Inspection Process
 The Inspection Process BAA Education Day October 25, 2014 Presented by Bill Landin Lead Robot Inspector Chesapeake Regional 1 Agenda Purpose and Goals Event Flow Inspection Key Points Initial Inspection
The Inspection Process BAA Education Day October 25, 2014 Presented by Bill Landin Lead Robot Inspector Chesapeake Regional 1 Agenda Purpose and Goals Event Flow Inspection Key Points Initial Inspection
Mechanical Motion. Control Components. and Subsystems. Understanding How Components Effect System Performance
 Mechanical Motion Control Components and Subsystems Understanding How Components Effect System Performance Mechanical Motion Control Components and Subsystems Overview: Bearings Linear Bearing Technologies
Mechanical Motion Control Components and Subsystems Understanding How Components Effect System Performance Mechanical Motion Control Components and Subsystems Overview: Bearings Linear Bearing Technologies
Team 2228 CougarTech 1. Training L2. Electrical Design and Control System Wiring
 Team 2228 CougarTech 1 Training L2 Electrical Design and Control System Wiring Team 2228 CougarTech 2 Objectives Understand: Understand the electrical design process Understand the control system wiring
Team 2228 CougarTech 1 Training L2 Electrical Design and Control System Wiring Team 2228 CougarTech 2 Objectives Understand: Understand the electrical design process Understand the control system wiring
New Frontier in Energy, Engineering, Environment & Science (NFEEES-2018 ) Feb
 Feb") RESEARCH ARTICLE OPEN ACCESS DESIGN AND IMPACT ANALYSIS OF A ROLLCAGE FOR FORMULA HYBRID VEHICLE Aayush Bohra 1, Ajay Sharma 2 1(Mechanical department, Arya College of Engineering & I.T.,kukas, Jaipur)
RESEARCH ARTICLE OPEN ACCESS DESIGN AND IMPACT ANALYSIS OF A ROLLCAGE FOR FORMULA HYBRID VEHICLE Aayush Bohra 1, Ajay Sharma 2 1(Mechanical department, Arya College of Engineering & I.T.,kukas, Jaipur)
Manipulators. Example 1: The Claw
 Manipulators With these examples we will demonstrate some basic designs to accomplish each of the game piece challenges involved in the 2018 FIRST Global game Energy Impact to: 1. Collect fuel cubes and
Manipulators With these examples we will demonstrate some basic designs to accomplish each of the game piece challenges involved in the 2018 FIRST Global game Energy Impact to: 1. Collect fuel cubes and
2012 FIRST Robotics Competition Pneumatics Manual
 2012 FIRST Robotics Competition Pneumatics Manual The 2012 FIRST Robotics Competition (FRC) pneumatic components are outlined in this document. It is being provided as a courtesy, and therefore does not
2012 FIRST Robotics Competition Pneumatics Manual The 2012 FIRST Robotics Competition (FRC) pneumatic components are outlined in this document. It is being provided as a courtesy, and therefore does not
Wheeled Mobile Robots
 Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Wheeled Mobile Robots Most popular locomotion mechanism Highly efficient on hard and flat ground. Simple mechanical implementation Balancing is not usually a problem. Three wheels are sufficient to guarantee
Test Plans & Test Results
 P10227 Variable Intake System for FSAE Race Car Test Plans & Test Results By: Dave Donohue, Dan Swank, Matt Smith, Kursten O'Neill, Tom Giuffre Table of contents 1. MSD I: WKS 8-10 PRELIMINARY TEST PLAN...
P10227 Variable Intake System for FSAE Race Car Test Plans & Test Results By: Dave Donohue, Dan Swank, Matt Smith, Kursten O'Neill, Tom Giuffre Table of contents 1. MSD I: WKS 8-10 PRELIMINARY TEST PLAN...
L15 Dynamics & Vibration Laboratory
 LABORATORY PLANNING GUIDE L15 Dynamics & Vibration Laboratory Content Covered subjects according to the curriculum... 2 Main concept... 3 Initial training provided for laboratory personnel... 3 Requirements
LABORATORY PLANNING GUIDE L15 Dynamics & Vibration Laboratory Content Covered subjects according to the curriculum... 2 Main concept... 3 Initial training provided for laboratory personnel... 3 Requirements
Dallas BEST 2014 Blade Runner
 Dallas BEST 2014 Blade Runner Software Training 1 Easy C software training If needed, get your 150day EasyC licence code at Rkit pickup. Must run as admin to install EasyC license. RobotC and Simulink
Dallas BEST 2014 Blade Runner Software Training 1 Easy C software training If needed, get your 150day EasyC licence code at Rkit pickup. Must run as admin to install EasyC license. RobotC and Simulink
2018 KANSAS BEST BREAKOUT SESSIONS
 2018 KANSAS BEST BREAKOUT SESSIONS Tips for Building a Robot Bryan Jaax September 8, 2018 1 ST STEP: READ the RULES and Technical Data Package 2 FOLLOW AN ENGINEERING PROCESS Define the Problem Brainstorm:
2018 KANSAS BEST BREAKOUT SESSIONS Tips for Building a Robot Bryan Jaax September 8, 2018 1 ST STEP: READ the RULES and Technical Data Package 2 FOLLOW AN ENGINEERING PROCESS Define the Problem Brainstorm:
DESIGN AND ANALYSIS OF PRE- INSERTION RESISTOR MECHANISM
 DESIGN AND ANALYSIS OF PRE- INSERTION RESISTOR MECHANISM Bhavik Bhesaniya 1, Nilesh J Parekh 2, Sanket Khatri 3 1 Student, Mechanical Engineering, Nirma University, Ahmedabad 2 Assistant Professor, Mechanical
DESIGN AND ANALYSIS OF PRE- INSERTION RESISTOR MECHANISM Bhavik Bhesaniya 1, Nilesh J Parekh 2, Sanket Khatri 3 1 Student, Mechanical Engineering, Nirma University, Ahmedabad 2 Assistant Professor, Mechanical
Team 1378 X ED. Hilo Viking Robotics. Engineering Notebook. Team Roster:
 Hilo Viking Robotics Team 1378 X ED Engineering Notebook Team Roster: Brandon Leasure Dennis Palad Dustin De Reis Joshua Wilson Yuma Long Hua Uehara Joel Paye Kenji Emerson 1 Table of Contents Section
Hilo Viking Robotics Team 1378 X ED Engineering Notebook Team Roster: Brandon Leasure Dennis Palad Dustin De Reis Joshua Wilson Yuma Long Hua Uehara Joel Paye Kenji Emerson 1 Table of Contents Section
Engineering Design Process for BEST Robotics JANNE ACKERMAN COLLIN COUNTY (COCO) BEST & BEST OF TEXAS ROBOTICS
 BEST & BEST OF TEXAS ROBOTICS") Engineering Design Process for BEST Robotics JANNE ACKERMAN COLLIN COUNTY (COCO) BEST & BEST OF TEXAS ROBOTICS Agenda Getting Started Lessons Learned Design Process Engineering Mechanics 2 Save Time Complete
Engineering Design Process for BEST Robotics JANNE ACKERMAN COLLIN COUNTY (COCO) BEST & BEST OF TEXAS ROBOTICS Agenda Getting Started Lessons Learned Design Process Engineering Mechanics 2 Save Time Complete
Where ever you go ARC Systems, Inc. is there!
 Where ever you go ARC Systems, Inc. is there! ARC Systems, Inc. is a leading supplier of AC and BLDC Motors and motion control components in many different markets. ARC Systems, Inc. has been producing
Where ever you go ARC Systems, Inc. is there! ARC Systems, Inc. is a leading supplier of AC and BLDC Motors and motion control components in many different markets. ARC Systems, Inc. has been producing
ARC Systems, Inc. is a leading supplier of AC and BLDC Motors and motion control components to the Aerospace Industry.
 ARC Systems, Inc. ARC Systems, Inc. is a leading supplier of AC and BLDC Motors and motion control components to the Aerospace Industry. ARC Systems, Inc. has been producing quality motion control products
ARC Systems, Inc. ARC Systems, Inc. is a leading supplier of AC and BLDC Motors and motion control components to the Aerospace Industry. ARC Systems, Inc. has been producing quality motion control products
DESIGN AND DEVELOPMENT OF A SUSPENSION SYSTEM USED IN ROUGH- TERRAIN VEHICLE CONTROL FOR VIBRATION SUPPRESSION IN PLANETARY EXPLORATION
 DESIGN AND DEVELOPMENT OF A SUSPENSION SYSTEM USED IN ROUGH- TERRAIN VEHICLE CONTROL FOR VIBRATION SUPPRESSION IN PLANETARY EXPLORATION Arvin Niro College of Engineering University of Hawaiʽi at Mānoa
DESIGN AND DEVELOPMENT OF A SUSPENSION SYSTEM USED IN ROUGH- TERRAIN VEHICLE CONTROL FOR VIBRATION SUPPRESSION IN PLANETARY EXPLORATION Arvin Niro College of Engineering University of Hawaiʽi at Mānoa
Variable Valve Drive From the Concept to Series Approval
 Variable Valve Drive From the Concept to Series Approval New vehicles are subject to ever more stringent limits in consumption cycles and emissions. At the same time, requirements in terms of engine performance,
Variable Valve Drive From the Concept to Series Approval New vehicles are subject to ever more stringent limits in consumption cycles and emissions. At the same time, requirements in terms of engine performance,
Lockheed Martin. Team IDK Seung Soo Lee Ray Hernandez Chunyu PengHarshal Agarkar
 Lockheed Martin Team IDK Seung Soo Lee Ray Hernandez Chunyu PengHarshal Agarkar Abstract Lockheed Martin has developed several different kinds of unmanned aerial vehicles that undergo harsh forces when
Lockheed Martin Team IDK Seung Soo Lee Ray Hernandez Chunyu PengHarshal Agarkar Abstract Lockheed Martin has developed several different kinds of unmanned aerial vehicles that undergo harsh forces when
SAE Baja - Drivetrain
 SAE Baja - Drivetrain By Ricardo Inzunza, Brandon Janca, Ryan Worden Team 11A Concept Generation and Selection Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering
SAE Baja - Drivetrain By Ricardo Inzunza, Brandon Janca, Ryan Worden Team 11A Concept Generation and Selection Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering
Assemblies for Parallel Kinematics. Frank Dürschmied. INA reprint from Werkstatt und Betrieb Vol. No. 5, May 1999 Carl Hanser Verlag, München
 Assemblies for Parallel Kinematics Frank Dürschmied INA reprint from Werkstatt und Betrieb Vol. No. 5, May 1999 Carl Hanser Verlag, München Assemblies for Parallel Kinematics Frank Dürschmied Joints and
Assemblies for Parallel Kinematics Frank Dürschmied INA reprint from Werkstatt und Betrieb Vol. No. 5, May 1999 Carl Hanser Verlag, München Assemblies for Parallel Kinematics Frank Dürschmied Joints and
Lectures on mechanics
 Lectures on mechanics (lesson #3) francesco.becchi@telerobot.it LESSONS TIME TABLE (pls. take note) 28/11 h9/12- mech components 1 (3h) 4/12 h9/12 mech components 2 (3h) 11/12 h9/12 mech technologies (3h)
Lectures on mechanics (lesson #3) francesco.becchi@telerobot.it LESSONS TIME TABLE (pls. take note) 28/11 h9/12- mech components 1 (3h) 4/12 h9/12 mech components 2 (3h) 11/12 h9/12 mech technologies (3h)
Team Update 01. The Field Drawings FIRST POWER UP specific drawing package has been updated with the following changes:
 Team Update 01 General Drawing Packages The Field Drawings FIRST POWER UP specific drawing package has been updated with the following changes: - GE-18130 has been added - GE-181 and GE18025 have been
Team Update 01 General Drawing Packages The Field Drawings FIRST POWER UP specific drawing package has been updated with the following changes: - GE-18130 has been added - GE-181 and GE18025 have been
Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA)
") Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA) G. S. Choi and H. K. Min Kia Motors Technical Center 3-61 INTRODUCTION The reason manufacturers invest their time
Vehicle Dynamic Simulation Using A Non-Linear Finite Element Simulation Program (LS-DYNA) G. S. Choi and H. K. Min Kia Motors Technical Center 3-61 INTRODUCTION The reason manufacturers invest their time
Team 2468 VersaSwerve
 Team 2468 VersaSwerve Design Process Designed by Katie Anderson, Jonathan Bunt, Brett Etter, Michael Henderson, Nick Hummel, Sidhu Krishnamoorthi, Philip Liu, Grant Odama, Byron Seaberg Write up by Katie
Team 2468 VersaSwerve Design Process Designed by Katie Anderson, Jonathan Bunt, Brett Etter, Michael Henderson, Nick Hummel, Sidhu Krishnamoorthi, Philip Liu, Grant Odama, Byron Seaberg Write up by Katie
M3 Design Product Teardown Ameda Purely Yours Breast Pump
 28 Sep, 2010 Why do the product teardowns? M3 Design Product Teardown Ameda Purely Yours Breast Pump Part of the product development process is to apply knowledge gained from prior experience during the
28 Sep, 2010 Why do the product teardowns? M3 Design Product Teardown Ameda Purely Yours Breast Pump Part of the product development process is to apply knowledge gained from prior experience during the
Reverse Engineering case-study application in Motorsport. TITLE: Ergonomical study for the development of a new brake arm in motorbike
 Reverse Engineering case-study application in Motorsport TITLE: Ergonomical study for the development of a new brake arm in motorbike ABSTRACT The braking line represents in the world of motorcycle competition
Reverse Engineering case-study application in Motorsport TITLE: Ergonomical study for the development of a new brake arm in motorbike ABSTRACT The braking line represents in the world of motorcycle competition
SUMMER PROJECT ROBOTICS CLUB, IIT KANPUR
 SUMMER PROJECT ROBOTICS CLUB, IIT KANPUR 2013 AUTONOMOUS UNDERWATER VEHICLE Mentor - Dhrupal R. Shah Hall-10 Mob:-8765696060 Members Prakhar Jain Hall-5 Mob:-9807885652 Pranav Vyas Hall-3 Mob:-9695796655
SUMMER PROJECT ROBOTICS CLUB, IIT KANPUR 2013 AUTONOMOUS UNDERWATER VEHICLE Mentor - Dhrupal R. Shah Hall-10 Mob:-8765696060 Members Prakhar Jain Hall-5 Mob:-9807885652 Pranav Vyas Hall-3 Mob:-9695796655
USING INSPIRE AS AN UPFRONT DESIGN, OPTIMIZATION & SIMULATION TOOL FOR EXISITNG MANUAL GEARBOX COMPONENTS
 USING INSPIRE AS AN UPFRONT DESIGN, OPTIMIZATION & SIMULATION TOOL FOR EXISITNG MANUAL GEARBOX COMPONENTS Lokesh Kumar Gupta Manager Drive Line Eicher Polaris Plot- SP1 & 2, Kukas Jaipur India 302028 Lkgupta@eicherpolaris.in
USING INSPIRE AS AN UPFRONT DESIGN, OPTIMIZATION & SIMULATION TOOL FOR EXISITNG MANUAL GEARBOX COMPONENTS Lokesh Kumar Gupta Manager Drive Line Eicher Polaris Plot- SP1 & 2, Kukas Jaipur India 302028 Lkgupta@eicherpolaris.in
Winding Systems. Uhing Linear Drives. Product Range. Clamping Systems. Engineering
 Winding Systems Uhing Linear Drives Engineering Clamping Systems Product Range 01 e 02/2010 2 Joachim Uhing KG GmbH & Co. Joachim Uhing KG GmbH & Co. inventor of the rolling ring principle has been successful
Winding Systems Uhing Linear Drives Engineering Clamping Systems Product Range 01 e 02/2010 2 Joachim Uhing KG GmbH & Co. Joachim Uhing KG GmbH & Co. inventor of the rolling ring principle has been successful
SAE Baja - Drivetrain
 SAE Baja - Drivetrain By Ricardo Inzunza, Brandon Janca, Ryan Worden Team 11 Engineering Analysis Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering Design I
SAE Baja - Drivetrain By Ricardo Inzunza, Brandon Janca, Ryan Worden Team 11 Engineering Analysis Document Submitted towards partial fulfillment of the requirements for Mechanical Engineering Design I
The InEfficient Estabrook Elevator A powerful motor that incorporates a gas fired piston as the sole source of Energy.
 Dec. 2007 The InEfficient Estabrook Elevator A powerful motor that incorporates a gas fired piston as the sole source of Energy. Project by Brad Jenkins, Ken Pearson, Kevin Pittman, and Warren Raburn Basic
Dec. 2007 The InEfficient Estabrook Elevator A powerful motor that incorporates a gas fired piston as the sole source of Energy. Project by Brad Jenkins, Ken Pearson, Kevin Pittman, and Warren Raburn Basic
Pedal, Assembly, Controls Group 29
 Pedal, Assembly, Controls Group 29 ( Job No. Removal and Installation of Pedal Assembly 29 1 Repair of Pedal Assembly 29-2 Removal, Installation and Repair of Accelerator Pedal 29 3 Removal, Installation
Pedal, Assembly, Controls Group 29 ( Job No. Removal and Installation of Pedal Assembly 29 1 Repair of Pedal Assembly 29-2 Removal, Installation and Repair of Accelerator Pedal 29 3 Removal, Installation
Adult Sized Humanoid Robot: Archie
 Adult Sized Humanoid Robot: Archie Jacky Baltes 1, Chi Tai Cheng 1, M.C. Lau 1, Ahmad Byagowi 2, Peter Kopacek 2, and John Anderson 1 1 Autonomous Agent Lab University of Manitoba Winnipeg, Manitoba Canada,
Adult Sized Humanoid Robot: Archie Jacky Baltes 1, Chi Tai Cheng 1, M.C. Lau 1, Ahmad Byagowi 2, Peter Kopacek 2, and John Anderson 1 1 Autonomous Agent Lab University of Manitoba Winnipeg, Manitoba Canada,
UT cc Chain Saw Page 1 of 9 Figure A
 UT10519 46cc Chain Saw Page 1 of 9 Figure A UT10519 46cc Chain Saw Page 2 of 9 Figure A 1 700106001 1 Heat Reflector Tape 2 671087001 4 Spacer Insert 3 570226001 1 S Oil Outlet Grommet 4 660503002 1 Guide
UT10519 46cc Chain Saw Page 1 of 9 Figure A UT10519 46cc Chain Saw Page 2 of 9 Figure A 1 700106001 1 Heat Reflector Tape 2 671087001 4 Spacer Insert 3 570226001 1 S Oil Outlet Grommet 4 660503002 1 Guide
I Illustrated Parts List. Snow Thrower 1330 SBE OV. Illustrated Parts List
 Illustrated Parts List 008-0 I0800 Snow Thrower 0 SBE OV 0000 Illustrated Parts List AUGER HOUSING / IMPELLER ASSEMBLY 4 4 7 8 7 44 7 7 8 4 47 4 0 4 4 4 4 4 4 4 40 7 8 4 4 48 4 4 8 0 8 7 0 0 7 7 8 0 AUGER
Illustrated Parts List 008-0 I0800 Snow Thrower 0 SBE OV 0000 Illustrated Parts List AUGER HOUSING / IMPELLER ASSEMBLY 4 4 7 8 7 44 7 7 8 4 47 4 0 4 4 4 4 4 4 4 40 7 8 4 4 48 4 4 8 0 8 7 0 0 7 7 8 0 AUGER
The distinguishing features of the ServoRam and its performance advantages
 ADVANCED MOTION TECHNOLOGIES INC 1 The distinguishing features of the ServoRam and its performance advantages What is a Linear Motor? There are many suppliers of electrical machines that produce a linear
ADVANCED MOTION TECHNOLOGIES INC 1 The distinguishing features of the ServoRam and its performance advantages What is a Linear Motor? There are many suppliers of electrical machines that produce a linear
How To Build A Mini Chopper!
 How To Build A Mini Chopper! by Custom-Choppers-Guide.com Copyright All Rights Reserved. If you are new to such projects, it is strongly recommended that you do an assembly job, purchasing pre-constructed
How To Build A Mini Chopper! by Custom-Choppers-Guide.com Copyright All Rights Reserved. If you are new to such projects, it is strongly recommended that you do an assembly job, purchasing pre-constructed
Development and Testing of a High Compact Stepper Motor Mechanism
 Development and Testing of a High Compact Stepper Motor Mechanism Jörg Schmidt * and Greg Wright ** Abstract The Laboratory for Atmospheric and Space Physics (LASP) has developed for the Mars Atmosphere
Development and Testing of a High Compact Stepper Motor Mechanism Jörg Schmidt * and Greg Wright ** Abstract The Laboratory for Atmospheric and Space Physics (LASP) has developed for the Mars Atmosphere
User Guide. AM14U3-6 SR Mecanum Upgrade Kit (am-14u3-mk6sr)
") User Guide AM14U3-6 SR Mecanum Upgrade Kit (am-14u3-mk6sr) 1 AndyMark Your Robot Parts Experts AndyMark wishes the best of luck to all FIRST Teams in the upcoming FIRST Robotics Competition season! AndyMark,
User Guide AM14U3-6 SR Mecanum Upgrade Kit (am-14u3-mk6sr) 1 AndyMark Your Robot Parts Experts AndyMark wishes the best of luck to all FIRST Teams in the upcoming FIRST Robotics Competition season! AndyMark,
TYPICAL EXPERIMENTS Centers of gravity. Force triangle. Force polygon and Bow s Notation. Non- concurrent forces.
 MM 500-001 BASIC PANEL The panel is made from a perforated stainless steel sheet mounted on two supports with adjustable footings. The panel can be tilted, put in portrait or landscape position. Accessories
MM 500-001 BASIC PANEL The panel is made from a perforated stainless steel sheet mounted on two supports with adjustable footings. The panel can be tilted, put in portrait or landscape position. Accessories
Introduction. Pre-Lab
 The University Of Jordan School of Engineering Mechatronics Engineering Department Fluid Power Engineering Lab Experiments No.2 Pneumatic Control of a Double-acting Cylinder Objective: Students will be
The University Of Jordan School of Engineering Mechatronics Engineering Department Fluid Power Engineering Lab Experiments No.2 Pneumatic Control of a Double-acting Cylinder Objective: Students will be
Engine Does Not Start or Is Hard to Start Cause of Trouble. 1. Open the drain screw, and check Fuel not supplied (1) Fuel tank empty
 Fuel tank empty") 20. Engine Does Not Start or Is Hard to Start 20-1 Engine Output Insufficient 20-2 Poor Performance at Low Speed and Idling 20-3 Poor Performance at High Speed 20-3 Unsatisfactory Operation 20-4 Fuel Gauge
20. Engine Does Not Start or Is Hard to Start 20-1 Engine Output Insufficient 20-2 Poor Performance at Low Speed and Idling 20-3 Poor Performance at High Speed 20-3 Unsatisfactory Operation 20-4 Fuel Gauge
THE LONDON ELECTRIC TRAIN 11 CATCH UP
 THE LONDON ELECTRIC TRAIN 11 CATCH UP by Piers Connor NEW INFORMATION One of the benefits of writing a series like this is that from time to time some new information comes to light. Recently, a reader
THE LONDON ELECTRIC TRAIN 11 CATCH UP by Piers Connor NEW INFORMATION One of the benefits of writing a series like this is that from time to time some new information comes to light. Recently, a reader
Zoom and Print Options
 1 of 63 8/26/2017, 7:04 AM Vehicle» Transmission and Drivetrain» Transfer Case» Service and Repair» Procedures» Isuzu T150» Overhaul (Unit Repair)» 1. Transfer Case Disassemble Transfer Case Disassemble
1 of 63 8/26/2017, 7:04 AM Vehicle» Transmission and Drivetrain» Transfer Case» Service and Repair» Procedures» Isuzu T150» Overhaul (Unit Repair)» 1. Transfer Case Disassemble Transfer Case Disassemble
Compliant. Precise. Reliable. FUS Insertion Unit
 FUS Compliant. Precise. Reliable. FUS Insertion Unit Symmetrical insertion unit with centric locking and monitoring. Field of Application Assembly tasks with very little play among the parts to be aligned
FUS Compliant. Precise. Reliable. FUS Insertion Unit Symmetrical insertion unit with centric locking and monitoring. Field of Application Assembly tasks with very little play among the parts to be aligned
ELECTRIC POWER TRAINS THE KEY ENABLER FOR CONTRA ROTATING PROPELLERS IN GENERAL AVIATION (& VICE VERSA)
") ELECTRIC POWER TRAINS THE KEY ENABLER FOR CONTRA ROTATING PROPELLERS IN GENERAL AVIATION (& VICE VERSA) ATI D3 EVENT 8 TH MAY 2018 THE EMERGENCE OF ELECTRIFICATION IN AEROSPACE NICK SILLS, CONTRA ELECTRIC
ELECTRIC POWER TRAINS THE KEY ENABLER FOR CONTRA ROTATING PROPELLERS IN GENERAL AVIATION (& VICE VERSA) ATI D3 EVENT 8 TH MAY 2018 THE EMERGENCE OF ELECTRIFICATION IN AEROSPACE NICK SILLS, CONTRA ELECTRIC
Experience the Difference Aerospace and Specialty Bearings
 Experience the Difference Aerospace and Specialty Bearings E x p e r i e n c e t h e D i f f e r e n c e... i n T e c h n i c a l S u p p o r t 60+ Years of Innovation in Custom Aerospace Bearings Global
Experience the Difference Aerospace and Specialty Bearings E x p e r i e n c e t h e D i f f e r e n c e... i n T e c h n i c a l S u p p o r t 60+ Years of Innovation in Custom Aerospace Bearings Global
ROTARY DRIVES. Section 01. Introduction to the MagiDrive Range 004. Actuation Options 006. SOLID MagiDrive Series. MD10 Solid Range 008
 Section ROTARY DRIVES Introduction to the MagiDrive Range 004 Actuation Options 006 SOLID MagiDrive Series MD10 Solid Range 008 MD16N/MD16A Solid Range 0 MD40N/ MD40A Solid Range 2 MD40 Solid Range 4 MD64
Section ROTARY DRIVES Introduction to the MagiDrive Range 004 Actuation Options 006 SOLID MagiDrive Series MD10 Solid Range 008 MD16N/MD16A Solid Range 0 MD40N/ MD40A Solid Range 2 MD40 Solid Range 4 MD64
DMC U B O TA M O W E R C O N D I T I O N E R S DMC8000/DMC8500
 K U B O TA M O W E R C O N D I T I O N E R S 8000/8500 Trailed mower conditioners ranging from 9 2 (2.80m) to 13 1 (4.0m) with left hand or center pivot drawbar options DESIGNED TO OFFER Y PROTECTING YOUR
K U B O TA M O W E R C O N D I T I O N E R S 8000/8500 Trailed mower conditioners ranging from 9 2 (2.80m) to 13 1 (4.0m) with left hand or center pivot drawbar options DESIGNED TO OFFER Y PROTECTING YOUR
Mechanism Feasibility Design Task
 Mechanism Feasibility Design Task Dr. James Gopsill 1 Contents 1. Last Week 2. The Convertible Roof System 3. Boundary Calculations 4. Modelling the Deployment using Simulink Pendulum Fix it in position
Mechanism Feasibility Design Task Dr. James Gopsill 1 Contents 1. Last Week 2. The Convertible Roof System 3. Boundary Calculations 4. Modelling the Deployment using Simulink Pendulum Fix it in position
SAE Mini Baja By Ahmed Alnattar, Neil Gehr, and Matthew Legg Team 11
 SAE Mini Baja 2014-2015 By Ahmed Alnattar, Neil Gehr, and Matthew Legg Team 11 Final Report Document April 22, 2015 Submitted towards partial fulfillment of the requirements for Mechanical Engineering
SAE Mini Baja 2014-2015 By Ahmed Alnattar, Neil Gehr, and Matthew Legg Team 11 Final Report Document April 22, 2015 Submitted towards partial fulfillment of the requirements for Mechanical Engineering
Different types of gears. Spur gears. Idler gears. Worm gears. Bevel gears. Belts & Pulleys
 GEARS Robot Gears By using different gear diameters, you can exchange between rotational (or translation) velocity and torque. by looking at the motor datasheet you can determine the output velocity and
GEARS Robot Gears By using different gear diameters, you can exchange between rotational (or translation) velocity and torque. by looking at the motor datasheet you can determine the output velocity and
Gear Drive Solutions a Dedicated and Reliable Partner
 Gear Drive Solutions a Dedicated and Reliable Partner /// Gears, spindle gears, actuators, motors etc. /// Flange bearing and pillow block bearing units /// Standard or customized products /// Complete
Gear Drive Solutions a Dedicated and Reliable Partner /// Gears, spindle gears, actuators, motors etc. /// Flange bearing and pillow block bearing units /// Standard or customized products /// Complete
CORP 4 CRITICAL DESIGN REVIEW OATS AUTOMATED CARRIAGE AUGUST 1, 2011 AUBURN UNIVERSITY MECHANICAL ENGINEERING DR. BEALE CORP 4 PROJECT MEMBERS
 CORP 4 CRITICAL DESIGN REVIEW OATS AUTOMATED CARRIAGE AUGUST 1, 2011 AUBURN UNIVERSITY MECHANICAL ENGINEERING DR. BEALE CORP 4 PROJECT MEMBERS BENJAMIN BETHEL GRAYSON DAWSON CODY OWEN KYLE PALMER DANIEL
CORP 4 CRITICAL DESIGN REVIEW OATS AUTOMATED CARRIAGE AUGUST 1, 2011 AUBURN UNIVERSITY MECHANICAL ENGINEERING DR. BEALE CORP 4 PROJECT MEMBERS BENJAMIN BETHEL GRAYSON DAWSON CODY OWEN KYLE PALMER DANIEL
2012 Baja SAE Drivetrain
 2012 Baja SAE Drivetrain A thesis submitted to the Faculty of the Mechanical Engineering Technology Program of the University of Cincinnati in partial fulfillment of the requirements for the degree of
2012 Baja SAE Drivetrain A thesis submitted to the Faculty of the Mechanical Engineering Technology Program of the University of Cincinnati in partial fulfillment of the requirements for the degree of
FTC ROBOT COMPONENTS AND TIPS
 2017 WEST MICHIGAN FTC KICKOFF FTC ROBOT COMPONENTS AND TIPS Presented by: Chad Potinsky and Paul Dressel AGENDA Robot Mechanical Components Robot Build Tips Robot Electrical Components Robot Inspection
2017 WEST MICHIGAN FTC KICKOFF FTC ROBOT COMPONENTS AND TIPS Presented by: Chad Potinsky and Paul Dressel AGENDA Robot Mechanical Components Robot Build Tips Robot Electrical Components Robot Inspection
The Ladder Climber. Design Team. Design Advisor
 The Ladder Climber Design Team Younes Albahrani, Saad Farhad Andres Janna, Jhony Quintal, Shahan Sarkissian Design Advisor Prof. Hamid Hashemi Abstract The goal of this project was to create a low cost
The Ladder Climber Design Team Younes Albahrani, Saad Farhad Andres Janna, Jhony Quintal, Shahan Sarkissian Design Advisor Prof. Hamid Hashemi Abstract The goal of this project was to create a low cost
motion table of contents: squarebot assembly 3.2 concepts to understand 3.3 subsystems interfaces 3.21 motion subsystem inventory 3.
 The subsystem of the robot is responsible for exactly that,. It includes both the motors that generate, and the wheels and gears that transfer and transform that into the desired forms. With the structural
The subsystem of the robot is responsible for exactly that,. It includes both the motors that generate, and the wheels and gears that transfer and transform that into the desired forms. With the structural
Stopping Accuracy of Brushless
 Stopping Accuracy of Brushless Features of the High Rigidity Type DGII Series Hollow Rotary Actuator The DGII Series hollow rotary actuator was developed for positioning applications such as rotating a
Stopping Accuracy of Brushless Features of the High Rigidity Type DGII Series Hollow Rotary Actuator The DGII Series hollow rotary actuator was developed for positioning applications such as rotating a
Performance evaluation for various braking systems of street motorcycles
 Performance evaluation for various braking systems of street motorcycles Introduction This report covers a series of motorcycle braking tests aimed at measuring the performance of the front brake and of
Performance evaluation for various braking systems of street motorcycles Introduction This report covers a series of motorcycle braking tests aimed at measuring the performance of the front brake and of
IEEE SoutheastCon Hardware Challenge
 IEEE SoutheastCon Hardware Challenge Cameron McSweeney, Kendall Knapp Brian Roskuszka, Daniel Hofstetter Advisors: Dr. Jing Wang, Dr. Yufeng Lu, Dr. In Soo Ahn Overview Introduction Review of Literature
IEEE SoutheastCon Hardware Challenge Cameron McSweeney, Kendall Knapp Brian Roskuszka, Daniel Hofstetter Advisors: Dr. Jing Wang, Dr. Yufeng Lu, Dr. In Soo Ahn Overview Introduction Review of Literature
Addressing performance balancing in fuel economy driven vehicle programs
 EAEC-ESFA 2015 Presenter: Dr. Filip Deblauwe Addressing performance balancing in fuel economy driven vehicle programs Smarter decisions, better products. Introduction Performance balancing Application
EAEC-ESFA 2015 Presenter: Dr. Filip Deblauwe Addressing performance balancing in fuel economy driven vehicle programs Smarter decisions, better products. Introduction Performance balancing Application
Basic Unit of Mechanical Drive Systems MDSU. Engineering and Technical Teaching Equipment INTRODUCTION GENERAL DESCRIPTION
 Basic Unit of Mechanical Drive Systems Engineering and Technical Teaching Equipment MDSU Electronic console INTRODUCTION Mechanical drive systems and their applications are widely used in industry and
Basic Unit of Mechanical Drive Systems Engineering and Technical Teaching Equipment MDSU Electronic console INTRODUCTION Mechanical drive systems and their applications are widely used in industry and
Design and Simulation of New Versions of Tube Launched UAV
 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Design and Simulation of New Versions of Tube Launched UAV Y. Zhou and
NEW DESIGN AND DEVELELOPMENT OF ESKIG MOTORCYCLE
 NEW DESIGN AND DEVELELOPMENT OF ESKIG MOTORCYCLE Eskinder Girma PG Student Department of Automobile Engineering, M.I.T Campus, Anna University, Chennai-44, India. Email: eskindergrm@gmail.com Mobile no:7299391869
NEW DESIGN AND DEVELELOPMENT OF ESKIG MOTORCYCLE Eskinder Girma PG Student Department of Automobile Engineering, M.I.T Campus, Anna University, Chennai-44, India. Email: eskindergrm@gmail.com Mobile no:7299391869
Structural Analysis of Student Formula Race Car Chassis
 Structural Analysis of Student Formula Race Car Chassis Arindam Ghosh 1, Rishika Saha 2, Sourav Dhali 3, Adrija Das 4, Prasid Biswas 5, Alok Kumar Dubey 6 1Assistant Professor, Dept. of Mechanical Engineering,
Structural Analysis of Student Formula Race Car Chassis Arindam Ghosh 1, Rishika Saha 2, Sourav Dhali 3, Adrija Das 4, Prasid Biswas 5, Alok Kumar Dubey 6 1Assistant Professor, Dept. of Mechanical Engineering,
Rubber Band Car. Tommy Stewart Corey Marineau John Martinez
 Tommy Stewart Corey Marineau John Martinez Rubber Band Car PURPOSE: Create a rubber band propelled car that will travel three meters. Then create a regression line using the data that represents how the
Tommy Stewart Corey Marineau John Martinez Rubber Band Car PURPOSE: Create a rubber band propelled car that will travel three meters. Then create a regression line using the data that represents how the
Hummingbird-Inspired Wing Drive Mechanism
 The Institute for Systems Research ISR Technical Report 2007-17 Hummingbird-Inspired Wing Drive Mechanism Debra Rich ISR develops, applies and teaches advanced methodologies of design and analysis to solve
The Institute for Systems Research ISR Technical Report 2007-17 Hummingbird-Inspired Wing Drive Mechanism Debra Rich ISR develops, applies and teaches advanced methodologies of design and analysis to solve
DESIGN AND ANALYSIS OF TUBULAR CHASSIS OF GO-KART
 DESIGN AND ANALYSIS OF TUBULAR CHASSIS OF GO-KART Prashant Thakare 1, Rishikesh Mishra 2, Kartik Kannav 3, Nikunj Vitalkar 4, Shreyas Patil 5, Snehal Malviya 6 1 UG Students, Department of Mechanical Engineering,
DESIGN AND ANALYSIS OF TUBULAR CHASSIS OF GO-KART Prashant Thakare 1, Rishikesh Mishra 2, Kartik Kannav 3, Nikunj Vitalkar 4, Shreyas Patil 5, Snehal Malviya 6 1 UG Students, Department of Mechanical Engineering,
Motors 101. Tom Milnes BAA Team 2199 Representative Principal Mathematician JHU/APL. Why Use Electrical Motors?
 Motors 101 Tom Milnes BAA Team 2199 Representative Principal Mathematician JHU/APL Why Use Electrical Motors? High Torque or High Speed Rotational Motion Is Needed Low Torque and Speed can achieved with
Motors 101 Tom Milnes BAA Team 2199 Representative Principal Mathematician JHU/APL Why Use Electrical Motors? High Torque or High Speed Rotational Motion Is Needed Low Torque and Speed can achieved with
Booming Noise Optimization on an All Wheel Drive Vehicle
 on an All Wheel Drive Vehicle 3 rd International Conference Dynamic Simulation in Vehicle Engineering, 22-23 May 2014, St. Valentin, Austria Dr. Thomas Mrazek, ECS Team Leader Vehicle Dynamics ECS / Disclosure
on an All Wheel Drive Vehicle 3 rd International Conference Dynamic Simulation in Vehicle Engineering, 22-23 May 2014, St. Valentin, Austria Dr. Thomas Mrazek, ECS Team Leader Vehicle Dynamics ECS / Disclosure
MECH 486A - Senior Design Practicum Critical Design Review. Annemarie Kibbe, Cameron Ghia, Jiaxin Zhao, Mark Stratford, Michael McMann, Ryan Jensen
 MECH 486A - Senior Design Practicum Critical Design Review Annemarie Kibbe, Cameron Ghia, Jiaxin Zhao, Mark Stratford, Michael McMann, Ryan Jensen 1 Content Introduction Design Problem Analysis Design
MECH 486A - Senior Design Practicum Critical Design Review Annemarie Kibbe, Cameron Ghia, Jiaxin Zhao, Mark Stratford, Michael McMann, Ryan Jensen 1 Content Introduction Design Problem Analysis Design
CHOOSING THE RIGHT POWER MODULE FOR INVERTER DESIGNS. By Mark Steinmetz, Field Applications Engineer Vincotech GmbH
 CHOOSING THE RIGHT POWER MODULE FOR INVERTER DESIGNS By Mark Steinmetz, Field Applications Engineer Vincotech GmbH As Solar and UPS companies start to discuss the next generation inverter products, many
CHOOSING THE RIGHT POWER MODULE FOR INVERTER DESIGNS By Mark Steinmetz, Field Applications Engineer Vincotech GmbH As Solar and UPS companies start to discuss the next generation inverter products, many
Applications in Design & Engine. Analyzing Compound, Robotic Machines
 v2.1 Compound Machines ering Applications in Design & Engine Analyzing Compound, Robotic Machines Educational Objectives At the conclusion of this lesson, students should be able to: Understand the relationship
v2.1 Compound Machines ering Applications in Design & Engine Analyzing Compound, Robotic Machines Educational Objectives At the conclusion of this lesson, students should be able to: Understand the relationship
Capstone Design Project: Developing the Smart Arm Chair for Handicapped People
 Capstone Design Project: Developing the Smart Arm Chair for Handicapped People Kwang Sun Kim 1, Jun Young Kim 2, Kyung Min Jang 3 and Kang Wo Joo 4 1 School of Mechatronics Engineering, Korea University
Capstone Design Project: Developing the Smart Arm Chair for Handicapped People Kwang Sun Kim 1, Jun Young Kim 2, Kyung Min Jang 3 and Kang Wo Joo 4 1 School of Mechatronics Engineering, Korea University
Just as precise as your motion control application siemens.com/servo-geared-motors
 SIMOTICS S servo geared motors Just as precise as your motion control application siemens.com/servo-geared-motors All components operate together in a coordinated fashion: SIMOTICS S servo geared motors
SIMOTICS S servo geared motors Just as precise as your motion control application siemens.com/servo-geared-motors All components operate together in a coordinated fashion: SIMOTICS S servo geared motors
iracing.com Williams-Toyota FW31 Quick Car Setup Guide
 iracing.com Williams-Toyota FW31 Quick Car Setup Guide In this guide we will briefly explain a number of key setup parameters which are distinct to the FW31 and which are new to iracing vehicles. We hope
iracing.com Williams-Toyota FW31 Quick Car Setup Guide In this guide we will briefly explain a number of key setup parameters which are distinct to the FW31 and which are new to iracing vehicles. We hope
CORP 4 PROJECT GROUP BENJAMIN BETHEL GRAYSON DAWSON CODY OWEN KYLE PALMER DANIEL PAULK
 NEPTUNE TECHNOLOGY GROUP AUTOMATED DATA COLLECTION FOR ANTENNAS MECH 4240 CONCEPTS REVIEW SUMMER 2011 JULY 8, 2011 DR. BEALE AUBURN UNIVERSITY MECHANICAL ENGINEERING CORP 4 PROJECT GROUP BENJAMIN BETHEL
NEPTUNE TECHNOLOGY GROUP AUTOMATED DATA COLLECTION FOR ANTENNAS MECH 4240 CONCEPTS REVIEW SUMMER 2011 JULY 8, 2011 DR. BEALE AUBURN UNIVERSITY MECHANICAL ENGINEERING CORP 4 PROJECT GROUP BENJAMIN BETHEL
Use of Flow Network Modeling for the Design of an Intricate Cooling Manifold
 Use of Flow Network Modeling for the Design of an Intricate Cooling Manifold Neeta Verma Teradyne, Inc. 880 Fox Lane San Jose, CA 94086 neeta.verma@teradyne.com ABSTRACT The automatic test equipment designed
Use of Flow Network Modeling for the Design of an Intricate Cooling Manifold Neeta Verma Teradyne, Inc. 880 Fox Lane San Jose, CA 94086 neeta.verma@teradyne.com ABSTRACT The automatic test equipment designed
Warrior Racers Share Experience with State Legislatures
 Warrior Racers Share Experience with State Legislatures On Tuesday, March 21st, Wayne State University sent over 100 students and faculty from different degree programs to the state capitol in Lansing.
Warrior Racers Share Experience with State Legislatures On Tuesday, March 21st, Wayne State University sent over 100 students and faculty from different degree programs to the state capitol in Lansing.
The pneumatic circuit and parts' list needed to perform this operation are shown by Figure C.1.
 Introduction In session 1 you have learned about pneumatic systems and their main components. In addition to that your lab instructor has introduced to you how to use FluidSIM software. During this appendix
Introduction In session 1 you have learned about pneumatic systems and their main components. In addition to that your lab instructor has introduced to you how to use FluidSIM software. During this appendix
Design, Fabrication and Testing of an Unmanned Aerial Vehicle Catapult Launcher
 ISBN 978-93-84422-40-0 Proceedings of 2015 International Conference on Computing Techniques and Mechanical Engineering (ICCTME 2015) Phuket, October 1-3, 2015, pp. 47-53 Design, Fabrication and Testing
ISBN 978-93-84422-40-0 Proceedings of 2015 International Conference on Computing Techniques and Mechanical Engineering (ICCTME 2015) Phuket, October 1-3, 2015, pp. 47-53 Design, Fabrication and Testing