Contents GENERAL MOTOR TERMINOLOGY TABLES... 9 BASIC MOTOR PARAMETERS CONTACT INFORMATION... 11
|
|
|
- Eric O’Neal’
- 5 years ago
- Views:
Transcription

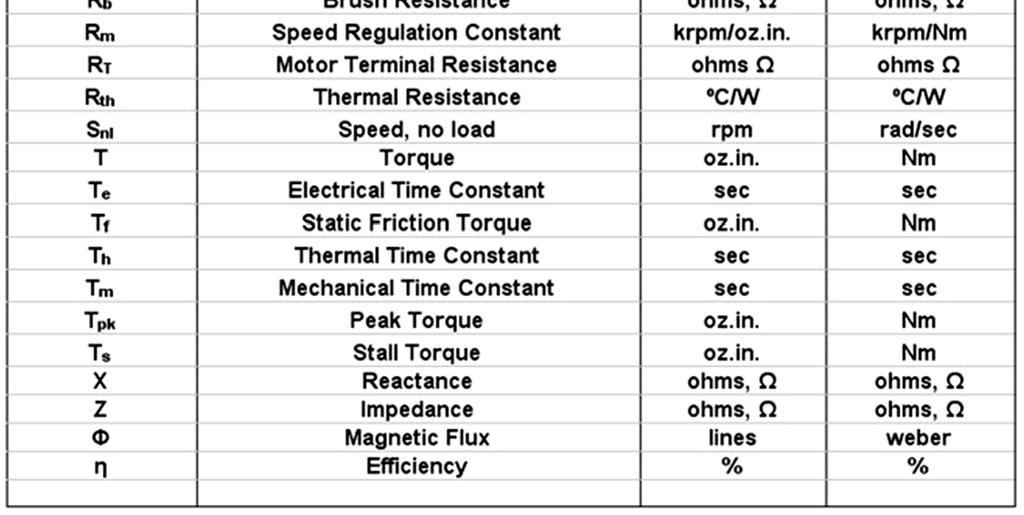
1 Note: the SMMA merged with the Motion Control Association to form the MCMA (Motion Control and Motor Association) in This original SMMA glossary is not available elsewhere and may contain dated material. It is offered as originally published just prior to the SMMA-MCA merger. Contents GENERAL MOTOR TERMINOLOGY TABLES... 9 Power Conversion Torque Constant Conversion Voltage Constant Conversion Damping Coefficient Conversion Torque Conversion BASIC MOTOR PARAMETERS CONTACT INFORMATION Last updated: February 2015 Page 1 of 11
2 GENERAL MOTOR TERMINOLOGY Acceleration (): The time rate change of velocity. Torque (T) developed by the rotor (armature) will cause it to accelerate. T / J, Where J = polar moment of inertia Acceleration Maximum ( m): An expression of maximum theoretical acceleration from stall (locked rotor) of an unloaded motor with maximum current (Im) applied, measured in rad/sec². Ambient Temperature: The temperature of the environment immediately surrounding the motor. It is measured in ºF or ºC. Armature: The rotating portion of the magnetic structure that is found in machines with commutators. Armature Inductance (La): The apparent inductance of the armature as seen by the brushes. Armature Reaction: A magnetic field is produced by the armature current. It is shifted approximately 90 electrical degrees with respect to the direction of the stator field. It causes the armature to rotate and tends to cause demagnetization of the trailing pole tips of the stator. Armature Resistance (Ra): The resistance of the armature winding, commutator connections and the commutator measured on the commutator bars normally spanned by a pair of opposite polarity brushes. It does not include the brush film. The resistance is usually taken at room temperature (25ºC). Axial End Play: The shaft displacement along the motor axis which is due to a reversal of the axial force. It is measured in inches or mm. Free End Play: The displacement measured when the moving force is removed after positioning the shaft axially from one extreme position to the other. Cushioned End Play: The displacement measured when a force of known value causes the shaft to move axially from one position to another. When specifying cushioned end play, the force and direction of movement must also be specified. Back EMF Constant (Kb) is equal to Voltage Constant (Ke): In a D.C. motor the constant that defines the magnitude of reverse voltage generated in the armature. It may be determined in a PMDC motor by driving the motor as an unloaded generator measuring the voltage and dividing by the speed in thousands of RPM. K b V / KRPM It has the following relationship to torque constant K b 0.74Kt( oz in / rpm) V / KRPM x10 K t ( oz in / rpm) V / rad / sec Last updated: February 2015 Page 2 of 11
3 It may be determined in a Brushless DC (BLDC) motor by driving the motor as a generator and obtaining the peak to peak voltage on an oscilloscope. Divide this value by two times the drive speed in thousands of RPM. In two phase BLDC motors the Kb and Kt have the approximately same relationship as the PMDC motor in the three phase BLDC motors the relationship is approximately equal to 3 K b K t 2 Breakaway Torque: The value of torque that is required to begin motion of an armature or rotor that is de-energized and has been at rest. Breakdown Torque: The maximum torque developed by an induction motor at rated voltage and frequency without an abrupt drop in speed. Brush Resistance (Rb): Circuit resistance created by the brushes and the brush film in a brush type motor (universal, PM, wound field) adding to other power losses in a motor. Cogging: A cyclical torque variation superimposed on the D.C. motor torque caused by permeance variations as the armature teeth or rotor magnets pass stator pole tips. Commutation: In D.C. motors the switching (either mechanically or electronically) of the direction of the current in a coil or group of coils to cause a change of magnetic polarity. Commutation Angle: In a brush type D.C. motor, the angle in electrical degrees that a coil or group of coils on an armature rotate while being commutated. In a brushless D.C. motor, the angular difference in electrical degrees between the rotor and stator poles when the current is reversed in the windings. Damping Coefficient (Kd): In a D.C. motor the constant that defines the braking characteristics of the motor with shorted leads. K d K b xk t (oz-in./rad./sec.) K b xk R t t Where Rt = terminal resistance in ohms Dielectric Strength: A high voltage test of the motor s insulation ability to withstand an A.C. voltage. The test criterion limits the leakage current to a specified maximum at the test voltage of specified magnitude and frequency, applied between the motor case and windings. Duty Cycle: The relationship between the operating time and the off time of a motor. Both the on time and the repetition rate must be specified. Dynamic Braking: A control function that brakes the motor by dissipating its stored energy. Efficiency(η): The ratio of power output to power input of a machine usually expressed as a percentage. Po / Pm x100% Last updated: February 2015 Page 3 of 11
4 Electromagnetic Interference (EMI): Electromagnetic interference (EMI), sometimes referred to as Radio Frequency Interference (RFI), is a phenomenon which, either directly or indirectly can contribute to degradation in performance of an electronic receiver or system. EMI consists of undesirable voltages and currents that reach the victim device either by conduction through the power lines or by radiation through the air and causes the device to exhibit undesirable performance. It is usually caused by switching or winding commutation. Field Coil Resistance: The resistance of the wire in the field coil as seen at the field leads or terminals. Form Factor: The ratio of RMS current to average current. Frictional Damping Coefficient (Kf): In a D.C. motor or BLDC motor, the constant that defines the braking characteristics of the motor with open leads. Units are oz-in/rad/sec; ozin/rpm; or Nm/rad/sec. Full-Load Torque: The torque developed at rated horsepower and speed with rated voltage and frequency applied. Heat Sink: This is a piece of metal (usually aluminum) of a specific size and thickness to which a motor is mounted while heat rise tests are conducted. The orientation, such as vertical or horizontal, needs to be stated with the test results. Horse Power: A unit of measure of motor output power. It is obtained by the following formula: HP T ( oz in) xs( RPM ) T( L b ft) xs( RPM ) 1,008,000 or 5250 Impedance (Z): A measure of the total opposition to the flow of an alternating current. It is the vector sum of resistance, inductive reactance and capacitive reactance. Impedance Protected: A motor which under stalled conditions will not exceed specified maximum coil temperatures. Implies that the motor can be stalled (maximum temperature condition) without overheating or damage. Incrementing: A rapid start, move and stop motion. Inductance (L): A resistance to a change in current. It is measured in henrys. Locked Rotor: This is a motor test condition in which the rotating element is not allowed to move. Magnetic Flux (Φ): A term used to describe the amount of magnetism there is in a space around a coil or permanent magnet or in the air gap of a motor. It is measured in lines or webers. Last updated: February 2015 Page 4 of 11
5 Magnetic Flux Density (B): This is the measure of concentration of magnetic flux (Φ) in a given area. It is measured in lines per square inch or tesla. Magnetic Field Intensity (H): The vector magnetic quantity that determines the ability of an electric current or a magnetic body to induce a magnetic field at a given point. It is measured in oersterds, amps turns/inch or amps/meter. Maximum Current (Im): The maximum current limit beyond which demagnetization of the permanent magnet field (in a PM motor) will occur (at 20 C). Moment of Inertia (Jl): The property of matter that causes it to resist any change in its rotational or positional state. Normally it is an important property of the armature (Jm) or rotor. It is typically measured in oz-in-sec 2, gm-cm-sec 2, or KgM 2 (S.I.) Motor Constant (Km): The ratio of the motor torque to motor input power. It is measured in Nm/W or oz.in./w. Neutral Zone: The angular distance in electrical degrees between magnet poles or field poles. It is the theoretical space in which field flux is zero. No Load Current (Inl): The current generated at rated voltage with no load on the motor a function of rotation losses, both electrical and mechanical. No Load Speed-Actual (No): The actual speed the motor will run with no load applied at rated voltage. No Load Speed-True (Nlo): A theoretical speed to which the motor will rise when rated voltage is applied with no load. This speed is based on the point where back emf is equal to input voltage. Peak Torque (Tpk): The maximum torque capability of a motor based on the maximum current limit (Im). Tpk = KtIm Power Dissipated (Pd or Pl): Power loss due to energy expended in the motor stator and rotor. It appears as heat and is expressed in watts. Pd = Pin-Po Power In (Pin): Input power as a function of volts times amps in D.C. motors and volts times amps times power factor (Pf) in A.C. motors and expresses watts. D.C. Pin = V x I A.C. Pin = e i Pf Power Factor (Pf): The ratio of actual or resistive power to the apparent or total power in an A.C. motor. The total power is the vector sum of the resistive and reactive powers. Pin Pf VA Where V= applied voltage A= line current in amperes Last updated: February 2015 Page 5 of 11
6 Power Out (Po): The output power computed by multiplying torque times speed times a constant. Power out is equal to the power in minus all of the losses. Po=T x S x K K=7.397 x 10-4 for T = oz-in K=1.420 x 10-1 for T = Lb-ft K=1.183 x 10-2 for T = Lb-in K=8.877 x 10-3 for T = oz-ft Pull-In Torque: (synchronous motors) Pull-in torque is obtained by starting the motor from rest at a pre-set torque value and specified motor terminal voltage. The maximum torque setting which the motor will accelerate to synchronous speed is the pull-in torque. Since the inertia of the connected load greatly affects the pull-in torque, this test should be run with minimum external inertia. Pull-Out Torque: (synchronous motors) Pull-out torque is obtained by steadily increasing the load torque from the normal operating range of a synchronous motor while maintaining specified terminal voltage. The maximum torque reading obtained without having caused the speed to drop from synchronous speed is the pull-out torque. Pull-Up Torque: (induction motors) Pull-up torque is obtained by starting the motor from rest at a pre-set torque value and specified motor terminal voltage. The maximum torque setting which the motor will accelerate to a speed higher than the speed at which breakdown torque occurs is the pull-up torque. Resistance (R): The property of a material that limits current through it. It is varied by the material, size and configuration. It is measured in ohms. R A where: ρ = resistivity of the material l = length A = area Motor terminal resistance R = Ra + Rb Rotor: The rotating element of the magnetic structure which is found in non-commutator machines. Skew: The angular displacement of the rotor or armature slots from one end to the other. It can be expressed in terms of the angular displacement from parallel. It can be expressed in degrees, bars or slots. Slip: The difference in speed between the rotating field of an induction motor and the actual rotor speed. Slip is usually expressed as a percentage of the synchronous speed. Last updated: February 2015 Page 6 of 11
7 Speed No Load (Snl): Actual motor speed in rpm with no external load and specified terminal voltage. Speed Load: The actual motor speed in RPM with a specified external load and specified terminal voltage and frequency. Speed Regulation Constant (Rm): The slope of the speed-torque curve in rpm/oz.in. or rpm/nm. Rm = R/KeKt. Speed Synchronous (ns): The speed of the rotating field of an induction or synchronous motor. It may be calculated by multiplying 120 times the frequency of the power supply divided by the number of poles. 120 f n s Stall Current (Is): This is the current at stall (locked rotor) with rated voltage applied. Is = Volts/Rt. Stall Torque (Ts): This is the actual torque at the output shaft under stall (locked rotor) conditions. Ts = (KtIs)-Tf. Starting Current (Ias): The minimum current necessary to overcome static friction torque and start motor rotation. Starting Torque: The minimum torque which is developed at rest for all angular positions of the rotor with rated voltage and frequency applied to the motor. Static Friction Torque (Tf): A measure of the resistance to angular motion. It is due to bearing friction and cog friction. Cog friction is the magnetic drag between the permanent magnet and rotor laminations in a PM motor. It may be taken as the average of four readings taken 90 apart with a torque watch. Temperature Rise: The increase in temperature in ºC or ºF of the excited winding coil above ambient temperature at locked rotor or any designated load condition. Trise = T(total) - TAmb Hot) Terminal Resistance (Rt): The resistance of a motor as seen by the power supply. It is measured at the motor power leads or terminals. Thermal Capacity (Tc): The ability of a motor to dissipate changing amounts of power. Th Tc R th Watt minute C Rise Last updated: February 2015 Page 7 of 11
8 Thermal Dissipation Factor (Thermal Resistance) (Rth): A motor s ability to dissipate heat. It provides a means of evaluating winding temperature as a function of outside surface temperature under steady state conditions, and is measured in ºC/watt. Time Constant, Electrical (Te): This is the time required for the armature or winding current to reach 63.2% of its steady state conditions. It can be mathematically derived from the following formula: La Te R t Time Constant, Mechanical (Tm): The time required for an unloaded motor to reach 63.2% of its final velocity after applying the armature or winding voltage. This constant can be mathematically derived from the following formula: J mrt Tm Kt K e seconds Jm = motor inertia (oz-in-sec 2 ) Rt = terminal resistance (ohms) Kt = torque constant oz-in/amp) Ke = voltage constant (volts/rad/sec) Time Constant, Thermal (Th): The time required for a motor to reach 63.2% of its final temperature under known input and load conditions. It is measured in minutes. (The value depends on mounting and motor speed). Torque (T): A property which produced, or tends to produce, rotation. A force of one pound applied to the handle of a crank, the center of which is displaced one foot from the center of the shaft produces a torque of one pound-foot, provided the force is applied perpendicular to, and not along, the crank. Torque Constant (Kt): In a D.C. motor the torque produced per unit armature current. T ( oz in) T ( N m ) K t I( Amp) or I( Amp) Torque Ripple: This refers to the cyclical variation of generating torque within one revolution. The torque variation superimposed on the D.C. torque component. The torque variation is a result of the permeance variation which occurs as the rotating member moves with respect to the stationary member. Torsional Resistance: The instantaneous change velocities in a motor-load system caused by the elasticity or compliance of the shaft. In certain driving modes, the frequencies of the various parts of the motor-load system or motor-tachometer load system are in opposite directions. Velocity: A measure of speed or rate of motion. It is measured in revolutions per minute (RPM) or radians per second. Last updated: February 2015 Page 8 of 11
9 Power Conversion (P) HP watts oz-in/sec HP x 10-5 watts 1.34 x oz-in/sec 9.47 x x Torque Constant Conversion (Kt) Nm/amp Lb-in/amp oz-in/amp Nm/amp Lb-in/amp oz-in/amp x Voltage Constant Conversion (Kb) V/rad/sec V/K RPM V/rad/sec V/K RPM 9.55 x Damping Coefficient Conversion (Kd, Kf ) oz-in/rpm oz-in-sec Nm-sec oz-in/rpm x 10-2 oz-in-sec x 10-3 Nm-sec x Torque Conversion Lb.Ft. Lb.In. Oz.In. Dyne-Cm Nm Ncm Kpm (kgfm) g-cm Lb.Ft x x x 10 4 Lb.In x x x x 10 3 Oz.In x x x x x Dyne-Cm x x x x x 10-3 Nm x x 10 4 Ncm x x x Kpm (kgfm) x x g-cm x x x x x Last updated: February 2015 Page 9 of 11


10 Last updated: February 2015 Page 10 of 11

11 Contact Information 64 Pardon Hill Road S. Dartmouth, Massachusetts Phone: Fax: Elizabeth B. Chambers Executive Director William H. Chambers Operations Director Last updated: February 2015 Page 11 of 11
Application Information
 Moog Components Group manufactures a comprehensive line of brush-type and brushless motors, as well as brushless controllers. The purpose of this document is to provide a guide for the selection and application
Moog Components Group manufactures a comprehensive line of brush-type and brushless motors, as well as brushless controllers. The purpose of this document is to provide a guide for the selection and application
COMPARISON OF PERFORMANCE FEATURES
 SERVODISC CATALOG A new dimension in performance If you are involved with high performance servomotor applications, there is an important motor technology which you should know about. It s the technology
SERVODISC CATALOG A new dimension in performance If you are involved with high performance servomotor applications, there is an important motor technology which you should know about. It s the technology
CHAPTER 3 DESIGN OF THE LIMITED ANGLE BRUSHLESS TORQUE MOTOR
 33 CHAPTER 3 DESIGN OF THE LIMITED ANGLE BRUSHLESS TORQUE MOTOR 3.1 INTRODUCTION This chapter presents the design of frameless Limited Angle Brushless Torque motor. The armature is wound with toroidal
33 CHAPTER 3 DESIGN OF THE LIMITED ANGLE BRUSHLESS TORQUE MOTOR 3.1 INTRODUCTION This chapter presents the design of frameless Limited Angle Brushless Torque motor. The armature is wound with toroidal
Application Notes. Calculating Mechanical Power Requirements. P rot = T x W
 Application Notes Motor Calculations Calculating Mechanical Power Requirements Torque - Speed Curves Numerical Calculation Sample Calculation Thermal Calculations Motor Data Sheet Analysis Search Site
Application Notes Motor Calculations Calculating Mechanical Power Requirements Torque - Speed Curves Numerical Calculation Sample Calculation Thermal Calculations Motor Data Sheet Analysis Search Site
Quantum Series Size 17, 23, 34 and 56 Brushless Servo Motors Frameless and Housed Engineering Guide
 MACCON GmbH Kübachstr.9 D-81543 München Tel +49-89-65122()-21 Fax +49-89-655217 Quantum Series Size 17, 23, 34 and 56 Brushless Servo Motors Frameless and Housed Engineering Guide Selection Guide Quantum
MACCON GmbH Kübachstr.9 D-81543 München Tel +49-89-65122()-21 Fax +49-89-655217 Quantum Series Size 17, 23, 34 and 56 Brushless Servo Motors Frameless and Housed Engineering Guide Selection Guide Quantum
Why the Exlar T-LAM Servo Motors have Become the New Standard of Comparison for Maximum Torque Density and Power Efficiency
 Why the Exlar T-LAM Servo Motors have Become the New Standard of Comparison for Maximum Torque Density and Power Efficiency Introduction By Richard Welch Jr. - Consulting Engineer November 3, 2008 According
Why the Exlar T-LAM Servo Motors have Become the New Standard of Comparison for Maximum Torque Density and Power Efficiency Introduction By Richard Welch Jr. - Consulting Engineer November 3, 2008 According
ELEN 236 DC Motors 1 DC Motors
 ELEN 236 DC Motors 1 DC Motors Pictures source: http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/mothow.html#c1 1 2 3 Some DC Motor Terms: 1. rotor: The movable part of the DC motor 2. armature: The
ELEN 236 DC Motors 1 DC Motors Pictures source: http://hyperphysics.phy-astr.gsu.edu/hbase/magnetic/mothow.html#c1 1 2 3 Some DC Motor Terms: 1. rotor: The movable part of the DC motor 2. armature: The
Mechatronics Chapter 10 Actuators 10-3
 MEMS1049 Mechatronics Chapter 10 Actuators 10-3 Electric Motor DC Motor DC Motor DC Motor DC Motor DC Motor Motor terminology Motor field current interaction Motor commutator It consists of a ring of
MEMS1049 Mechatronics Chapter 10 Actuators 10-3 Electric Motor DC Motor DC Motor DC Motor DC Motor DC Motor Motor terminology Motor field current interaction Motor commutator It consists of a ring of
Silencer Series Brushless DC Motors
 Silencer Series Brushless DC Motors Medical and Commercial / Industrial TYPICAL APPLICATIONS Medical equipment - handheld devices, drills and saws Robotic systems Test and measurement equipment Pumps Scanners
Silencer Series Brushless DC Motors Medical and Commercial / Industrial TYPICAL APPLICATIONS Medical equipment - handheld devices, drills and saws Robotic systems Test and measurement equipment Pumps Scanners
Silencer Series Brushless DC Motors
 Silencer Series Brushless DC Motors Medical and Commercial / Industrial TYPICAL APPLICATIONS Medical equipment - handheld devices, drills and saws Robotic systems Test and measurement equipment Pumps Scanners
Silencer Series Brushless DC Motors Medical and Commercial / Industrial TYPICAL APPLICATIONS Medical equipment - handheld devices, drills and saws Robotic systems Test and measurement equipment Pumps Scanners
Electrical Machines -II
 Objective Type Questions: 1. Basically induction machine was invented by (a) Thomas Alva Edison (b) Fleming (c) Nikola Tesla (d) Michel Faraday Electrical Machines -II 2. What will be the amplitude and
Objective Type Questions: 1. Basically induction machine was invented by (a) Thomas Alva Edison (b) Fleming (c) Nikola Tesla (d) Michel Faraday Electrical Machines -II 2. What will be the amplitude and
Silencer Series Brushless DC Motors
 TYPICAL APPLICATIONS Medical equipment - pumps, blowers and electric scooters and wheelchairs Automatic door and window openers Computer-controlled embroidery machines Scanners Packaging equipment and
TYPICAL APPLICATIONS Medical equipment - pumps, blowers and electric scooters and wheelchairs Automatic door and window openers Computer-controlled embroidery machines Scanners Packaging equipment and
K Series Kit Motor Reliable and Compact Approach: Build your own high-performance motor
 Frameless K Series Kit Overview K Series Kit Motor Reliable and Compact Approach: Build your own high-performance motor Direct drive motion construction gives equipment designers the advantages of lower
Frameless K Series Kit Overview K Series Kit Motor Reliable and Compact Approach: Build your own high-performance motor Direct drive motion construction gives equipment designers the advantages of lower
Synchronous Generators I. EE 340 Spring 2011
 Synchronous Generators I EE 340 Spring 2011 Construction of synchronous machines In a synchronous generator, a DC current is applied to the rotor winding producing a rotor magnetic field. The rotor is
Synchronous Generators I EE 340 Spring 2011 Construction of synchronous machines In a synchronous generator, a DC current is applied to the rotor winding producing a rotor magnetic field. The rotor is
INTRODUCTION Principle
 DC Generators INTRODUCTION A generator is a machine that converts mechanical energy into electrical energy by using the principle of magnetic induction. Principle Whenever a conductor is moved within a
DC Generators INTRODUCTION A generator is a machine that converts mechanical energy into electrical energy by using the principle of magnetic induction. Principle Whenever a conductor is moved within a
Unit III-Three Phase Induction Motor:
 INTRODUCTION Unit III-Three Phase Induction Motor: The three phase induction motor runs on three phase AC supply. It is an ac motor. The power is transferred by means of induction. So it is also called
INTRODUCTION Unit III-Three Phase Induction Motor: The three phase induction motor runs on three phase AC supply. It is an ac motor. The power is transferred by means of induction. So it is also called
2 Principles of d.c. machines
 2 Principles of d.c. machines D.C. machines are the electro mechanical energy converters which work from a d.c. source and generate mechanical power or convert mechanical power into a d.c. power. These
2 Principles of d.c. machines D.C. machines are the electro mechanical energy converters which work from a d.c. source and generate mechanical power or convert mechanical power into a d.c. power. These
INDUSTRIAL MOTORS, INC. E340 Frame Series. Hi-Torq Brushless Direct-Drive Servomotor
 INDUSTRIAL MOTORS, INC. E340 Frame Series Hi-Torq Brushless Direct-Drive Servomotor 2606 Eden Terrace, Rock Hill, SC 29730 Phone 803-328-1888, Fax 803-328-1870 www.powertecmotors.com Applications for POWERTEC
INDUSTRIAL MOTORS, INC. E340 Frame Series Hi-Torq Brushless Direct-Drive Servomotor 2606 Eden Terrace, Rock Hill, SC 29730 Phone 803-328-1888, Fax 803-328-1870 www.powertecmotors.com Applications for POWERTEC
AC Motors vs DC Motors. DC Motors. DC Motor Classification ... Prof. Dr. M. Zahurul Haq
 AC Motors vs DC Motors DC Motors Prof. Dr. M. Zahurul Haq http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of Engineering & Technology ME 6401: Advanced Mechatronics
AC Motors vs DC Motors DC Motors Prof. Dr. M. Zahurul Haq http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of Engineering & Technology ME 6401: Advanced Mechatronics
CHAPTER 6 INTRODUCTION TO MOTORS AND GENERATORS
 CHAPTER 6 INTRODUCTION TO MOTORS AND GENERATORS Objective Describe the necessary conditions for motor and generator operation. Calculate the force on a conductor carrying current in the presence of the
CHAPTER 6 INTRODUCTION TO MOTORS AND GENERATORS Objective Describe the necessary conditions for motor and generator operation. Calculate the force on a conductor carrying current in the presence of the
FARADAY S LAW ELECTROMAGNETIC INDUCTION
 FARADAY S LAW ELECTROMAGNETIC INDUCTION magnetic flux density, magnetic field strength, -field, magnetic induction [tesla T] magnetic flux [weber Wb or T.m 2 ] A area [m 2 ] battery back t T f angle between
FARADAY S LAW ELECTROMAGNETIC INDUCTION magnetic flux density, magnetic field strength, -field, magnetic induction [tesla T] magnetic flux [weber Wb or T.m 2 ] A area [m 2 ] battery back t T f angle between
CHAPTER 4 MODELING OF PERMANENT MAGNET SYNCHRONOUS GENERATOR BASED WIND ENERGY CONVERSION SYSTEM
 47 CHAPTER 4 MODELING OF PERMANENT MAGNET SYNCHRONOUS GENERATOR BASED WIND ENERGY CONVERSION SYSTEM 4.1 INTRODUCTION Wind energy has been the subject of much recent research and development. The only negative
47 CHAPTER 4 MODELING OF PERMANENT MAGNET SYNCHRONOUS GENERATOR BASED WIND ENERGY CONVERSION SYSTEM 4.1 INTRODUCTION Wind energy has been the subject of much recent research and development. The only negative
DC CIRCUITS ELECTROMAGNETISM
 DC CIRCUITS 1. State and Explain Ohm s Law. Write in brief about the limitations of Ohm s Law. 2. State and explain Kirchhoff s laws. 3. Write in brief about disadvantages of series circuit and advantages
DC CIRCUITS 1. State and Explain Ohm s Law. Write in brief about the limitations of Ohm s Law. 2. State and explain Kirchhoff s laws. 3. Write in brief about disadvantages of series circuit and advantages
Synchronous Generators I. Spring 2013
 Synchronous Generators I Spring 2013 Construction of synchronous machines In a synchronous generator, a DC current is applied to the rotor winding producing a rotor magnetic field. The rotor is then turned
Synchronous Generators I Spring 2013 Construction of synchronous machines In a synchronous generator, a DC current is applied to the rotor winding producing a rotor magnetic field. The rotor is then turned
E180 DIAMETER FRAMES
 E18 DIAMETER FRAMES MODEL NUMBER CODE...E18 FRAME To construct a motor listing, select the combination of features required and put all the coded information in the proper sequence. Please account for
E18 DIAMETER FRAMES MODEL NUMBER CODE...E18 FRAME To construct a motor listing, select the combination of features required and put all the coded information in the proper sequence. Please account for
Copyright Notice. Small Motor, Gearmotor and Control Handbook Copyright Bodine Electric Company. All rights reserved.
 Copyright Notice Small Motor, Gearmotor and Control Handbook Copyright 1993-2003 Bodine Electric Company. All rights reserved. Unauthorized duplication, distribution, or modification of this publication,
Copyright Notice Small Motor, Gearmotor and Control Handbook Copyright 1993-2003 Bodine Electric Company. All rights reserved. Unauthorized duplication, distribution, or modification of this publication,
CHAPTER THREE DC MOTOR OVERVIEW AND MATHEMATICAL MODEL
 CHAPTER THREE DC MOTOR OVERVIEW AND MATHEMATICAL MODEL 3.1 Introduction Almost every mechanical movement that we see around us is accomplished by an electric motor. Electric machines are a means of converting
CHAPTER THREE DC MOTOR OVERVIEW AND MATHEMATICAL MODEL 3.1 Introduction Almost every mechanical movement that we see around us is accomplished by an electric motor. Electric machines are a means of converting
E280 DIAMETER FRAMES
 E28 DIAMETER FRAMES MODEL NUMBER CODE...E28 FRAME To construct a motor listing, select the combination of features required, and put all the coded information in the proper sequence. Please account for
E28 DIAMETER FRAMES MODEL NUMBER CODE...E28 FRAME To construct a motor listing, select the combination of features required, and put all the coded information in the proper sequence. Please account for
Compumotor BE Series Size 16 Specifications
 Compumotor BE Series Size 16 Specifications Automation Compumotor s BE Series brushless servo motors produce high continuous stall torque in a cost-reduced package. The increased torque of the BE series
Compumotor BE Series Size 16 Specifications Automation Compumotor s BE Series brushless servo motors produce high continuous stall torque in a cost-reduced package. The increased torque of the BE series
 APGENCO/APTRANSCO Assistant Engineer Electrical Previous Question Papers Q.1 The two windings of a transformer is conductively linked. inductively linked. not linked at all. electrically linked. Q.2 A
APGENCO/APTRANSCO Assistant Engineer Electrical Previous Question Papers Q.1 The two windings of a transformer is conductively linked. inductively linked. not linked at all. electrically linked. Q.2 A
PHY 152 (ELECTRICITY AND MAGNETISM)
") PHY 152 (ELECTRICITY AND MAGNETISM) ELECTRIC MOTORS (AC & DC) ELECTRIC GENERATORS (AC & DC) AIMS Students should be able to Describe the principle of magnetic induction as it applies to DC and AC generators.
PHY 152 (ELECTRICITY AND MAGNETISM) ELECTRIC MOTORS (AC & DC) ELECTRIC GENERATORS (AC & DC) AIMS Students should be able to Describe the principle of magnetic induction as it applies to DC and AC generators.
MT30R4 D.C. Servomotors
 MT30R4 D.C. Servomotors Technical Data Parameter Unit MT30R4-58 MT30R4-46 MT30R4-37 MT30R4-25 GENERAL Voltage Gradient No Load Volts/1000RPM* 58 46 37 25 Max. Terminal Voltage Volts 140 140 140 100 Max.
MT30R4 D.C. Servomotors Technical Data Parameter Unit MT30R4-58 MT30R4-46 MT30R4-37 MT30R4-25 GENERAL Voltage Gradient No Load Volts/1000RPM* 58 46 37 25 Max. Terminal Voltage Volts 140 140 140 100 Max.
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Chapter 7: DC Motors and Transmissions. 7.1: Basic Definitions and Concepts
 Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
Chapter 7: DC Motors and Transmissions Electric motors are one of the most common types of actuators found in robotics. Using them effectively will allow your robot to take action based on the direction
Introduction. Upon completion of AC Motors you should be able to: Explain the concepts of force, inertia, speed, and torque
 Table of Contents Introduction...2 AC Motors...4 Force and Motion...6 Energy... 11 Electrical Energy... 13 AC Motor Construction... 17 Magnetism... 23 Electromagnetism... 25 Developing a Rotating Magnetic
Table of Contents Introduction...2 AC Motors...4 Force and Motion...6 Energy... 11 Electrical Energy... 13 AC Motor Construction... 17 Magnetism... 23 Electromagnetism... 25 Developing a Rotating Magnetic
K Series Kit Motors. Frameless Kit Motors are the Reliable and Compact Approach to Build Your Own High-Performance Motor. Contact Information:
 K Series Kit Motors Frameless Kit Motors are the Reliable and Compact Approach to Build Your Own High-Performance Motor Direct drive motion construction gives equipment designers the advantages of lower
K Series Kit Motors Frameless Kit Motors are the Reliable and Compact Approach to Build Your Own High-Performance Motor Direct drive motion construction gives equipment designers the advantages of lower
Kollmorgen Frameless Motor Selection Guide
 Kollmorgen Frameless Motor Selection Guide KBM Series Brushless Motors Kollmorgen. Every solution comes from a real understanding of OEM challenges. The ever-escalating demands of the marketplace mean
Kollmorgen Frameless Motor Selection Guide KBM Series Brushless Motors Kollmorgen. Every solution comes from a real understanding of OEM challenges. The ever-escalating demands of the marketplace mean
Robot components: Actuators
 Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
Robotics 1 Robot components: Actuators Prof. Alessandro De Luca Robotics 1 1 Robot as a system program of tasks commands Robot actions working environment mechanical units supervision units sensor units
DHANALAKSHMI SRINIVASAN COLLEGE OF ENGINEERING AND TECHNOLOGY MAMALLAPURAM, CHENNAI
 DHANALAKSHMI SRINIVASAN COLLEGE OF ENGINEERING AND TECHNOLOGY MAMALLAPURAM, CHENNAI -603104 DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK VII SEMESTER EE6501-Power system Analysis
DHANALAKSHMI SRINIVASAN COLLEGE OF ENGINEERING AND TECHNOLOGY MAMALLAPURAM, CHENNAI -603104 DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK VII SEMESTER EE6501-Power system Analysis
LIMITED ANGLE TORQUE MOTORS
 LIMITED ANGLE TORQUE MOTORS Limited Angle Torque Motors H2W Technologies Limited Angle Torque Motors are ideal for compact, limited angular excursion (
LIMITED ANGLE TORQUE MOTORS Limited Angle Torque Motors H2W Technologies Limited Angle Torque Motors are ideal for compact, limited angular excursion (
Question Bank ( ODD)
") Programme : B.E Question Bank (2016-2017ODD) Subject Semester / Branch : EE 6703 SPECIAL ELECTRICAL MACHINES : VII-EEE UNIT - 1 PART A 1. List the applications of synchronous reluctance motors. 2. Draw
Programme : B.E Question Bank (2016-2017ODD) Subject Semester / Branch : EE 6703 SPECIAL ELECTRICAL MACHINES : VII-EEE UNIT - 1 PART A 1. List the applications of synchronous reluctance motors. 2. Draw
VALLIAMMAI ENGINEERING COLLEGE
 VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203. DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING Question Bank EE6401 ELECTRICAL MACHINES I UNIT I: MAGNETIC CIRCUITS AND MAGNETIC
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203. DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING Question Bank EE6401 ELECTRICAL MACHINES I UNIT I: MAGNETIC CIRCUITS AND MAGNETIC
Sensorless Brushless DC-Servomotors
 Sensorless Brushless DC-Servomotors FAULHABER Brushless DC-Servomotors are built for extreme operating conditions. They are precise, have exceptionally long lifetimes and are highly reliable. Outstanding
Sensorless Brushless DC-Servomotors FAULHABER Brushless DC-Servomotors are built for extreme operating conditions. They are precise, have exceptionally long lifetimes and are highly reliable. Outstanding
1.9" (48mm) Slotless Brushless Air Cooled Bearing Motor.
 Slotless Brushless Air Cooled Bearing Motor.") 1.9" (48mm) Slotless Brushless Air Cooled Bearing Motor. 24V windings Sensorless Up to 200,000 rpm Maximum continuous power to 85 watts Quiet and cool operation. Slotless design is cog free, and provides
1.9" (48mm) Slotless Brushless Air Cooled Bearing Motor. 24V windings Sensorless Up to 200,000 rpm Maximum continuous power to 85 watts Quiet and cool operation. Slotless design is cog free, and provides
Note 8. Electric Actuators
 Note 8 Electric Actuators Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 1 1. Introduction In a typical closed-loop, or feedback, control
Note 8 Electric Actuators Department of Mechanical Engineering, University Of Saskatchewan, 57 Campus Drive, Saskatoon, SK S7N 5A9, Canada 1 1. Introduction In a typical closed-loop, or feedback, control
14 Single- Phase A.C. Motors I
 Lectures 14-15, Page 1 14 Single- Phase A.C. Motors I There exists a very large market for single-phase, fractional horsepower motors (up to about 1 kw) particularly for domestic use. Like many large volume
Lectures 14-15, Page 1 14 Single- Phase A.C. Motors I There exists a very large market for single-phase, fractional horsepower motors (up to about 1 kw) particularly for domestic use. Like many large volume
Electrical Machines II. Week 5-6: Induction Motor Construction, theory of operation, rotating magnetic field and equivalent circuit
 Electrical Machines II Week 5-6: Induction Motor Construction, theory of operation, rotating magnetic field and equivalent circuit Asynchronous (Induction) Motor: industrial construction Two types of induction
Electrical Machines II Week 5-6: Induction Motor Construction, theory of operation, rotating magnetic field and equivalent circuit Asynchronous (Induction) Motor: industrial construction Two types of induction
MOONS SM servo motors offer a great combination of Power, Precision and Value:
 MOONS SM Series of servo motors has been expanded and improved. The SM Series now includes a variety of standard windings, more feedback options, and more connection options. Some ratings have increased,
MOONS SM Series of servo motors has been expanded and improved. The SM Series now includes a variety of standard windings, more feedback options, and more connection options. Some ratings have increased,
Renewable Energy Systems 13
 Renewable Energy Systems 13 Buchla, Kissell, Floyd Chapter Outline Generators 13 Buchla, Kissell, Floyd 13-1 MAGNETISM AND ELECTROMAGNETISM 13-2 DC GENERATORS 13-3 AC SYNCHRONOUS GENERATORS 13-4 AC INDUCTION
Renewable Energy Systems 13 Buchla, Kissell, Floyd Chapter Outline Generators 13 Buchla, Kissell, Floyd 13-1 MAGNETISM AND ELECTROMAGNETISM 13-2 DC GENERATORS 13-3 AC SYNCHRONOUS GENERATORS 13-4 AC INDUCTION
CHAPTER 4 HARDWARE DEVELOPMENT OF DUAL ROTOR RADIAL FLUX PERMANENT MAGNET GENERATOR FOR STAND-ALONE WIND ENERGY SYSTEMS
 66 CHAPTER 4 HARDWARE DEVELOPMENT OF DUAL ROTOR RADIAL FLUX PERMANENT MAGNET GENERATOR FOR STAND-ALONE WIND ENERGY SYSTEMS 4.1 INTRODUCTION In this chapter, the prototype hardware development of proposed
66 CHAPTER 4 HARDWARE DEVELOPMENT OF DUAL ROTOR RADIAL FLUX PERMANENT MAGNET GENERATOR FOR STAND-ALONE WIND ENERGY SYSTEMS 4.1 INTRODUCTION In this chapter, the prototype hardware development of proposed
Kollmorgen Frameless Motor Selection Guide
 Kollmorgen Frameless Motor Selection Guide KBM Series Brushless Motors Kollmorgen. Every solution comes from a real understanding of OEM challenges. The ever-escalating demands of the marketplace mean
Kollmorgen Frameless Motor Selection Guide KBM Series Brushless Motors Kollmorgen. Every solution comes from a real understanding of OEM challenges. The ever-escalating demands of the marketplace mean
Single Phase Induction Motor. Dr. Sanjay Jain Department Of EE/EX
 Single Phase Induction Motor Dr. Sanjay Jain Department Of EE/EX Application :- The single-phase induction machine is the most frequently used motor for refrigerators, washing machines, clocks, drills,
Single Phase Induction Motor Dr. Sanjay Jain Department Of EE/EX Application :- The single-phase induction machine is the most frequently used motor for refrigerators, washing machines, clocks, drills,
9.9 Light Chopper Drive Motor
 9.9 Light Chopper Drive Motor This application is for a motor to drive a slotted wheel which in turn interrupts (chops) a light beam at a frequency of 200 H z. The chopper wheel has only a single slot
9.9 Light Chopper Drive Motor This application is for a motor to drive a slotted wheel which in turn interrupts (chops) a light beam at a frequency of 200 H z. The chopper wheel has only a single slot
Data Sheet. Size 1 and 2 Stepper Motors. 7.5 stepper motors Size 1 (RS stock no ) Size 2 (RS stock no ) Data Pack B
 Size 2 (RS stock no ) Data Pack B") Data Pack B Issued November 005 1504569 Data Sheet Size 1 and Stepper Motors 7.5 stepper motors Size 1 (S stock no. 33-947) Size (S stock no. 33-953) Two 7.5 stepper motors each with four 1Vdc windings
Data Pack B Issued November 005 1504569 Data Sheet Size 1 and Stepper Motors 7.5 stepper motors Size 1 (S stock no. 33-947) Size (S stock no. 33-953) Two 7.5 stepper motors each with four 1Vdc windings
Brushless dc motor (BLDC) BLDC motor control & drives
 BLDC motor control & drives") Brushless dc motor (BLDC) BLDC motor control & drives Asst. Prof. Dr. Mongkol Konghirun Department of Electrical Engineering King Mongkut s University of Technology Thonburi Contents Brushless dc (BLDC)
Brushless dc motor (BLDC) BLDC motor control & drives Asst. Prof. Dr. Mongkol Konghirun Department of Electrical Engineering King Mongkut s University of Technology Thonburi Contents Brushless dc (BLDC)
.63 (16mm) Series. High performance slotless brushless motors for military, aerospace, medical/dental, and industrial applications
 Series. High performance slotless brushless motors for military, aerospace, medical/dental, and industrial applications") .63 (16mm) Series High performance slotless brushless motors for military, aerospace, medical/dental, and industrial applications Large.125 shaft and bearings Speeds up 53,040 rpm Cog free design ideal
.63 (16mm) Series High performance slotless brushless motors for military, aerospace, medical/dental, and industrial applications Large.125 shaft and bearings Speeds up 53,040 rpm Cog free design ideal
Technical Guide No. 7. Dimensioning of a Drive system
 Technical Guide No. 7 Dimensioning of a Drive system 2 Technical Guide No.7 - Dimensioning of a Drive system Contents 1. Introduction... 5 2. Drive system... 6 3. General description of a dimensioning
Technical Guide No. 7 Dimensioning of a Drive system 2 Technical Guide No.7 - Dimensioning of a Drive system Contents 1. Introduction... 5 2. Drive system... 6 3. General description of a dimensioning
Omni Series Motors. Applimotion Motors & Actuators TORQUE. Low-Profile Direct Drive Motors for the World s Machines and Robots PRODUCT DATA SHEET
 TORQUE Motors & Actuators PRODUCT DATA SHEET Omni Series Motors Low-Profile Direct Drive Motors for the World s Machines and Robots The Omni Series enables OEMs to design high performance, reliable, small
TORQUE Motors & Actuators PRODUCT DATA SHEET Omni Series Motors Low-Profile Direct Drive Motors for the World s Machines and Robots The Omni Series enables OEMs to design high performance, reliable, small
QUESTION BANK SPECIAL ELECTRICAL MACHINES
 SEVENTH SEMESTER EEE QUESTION BANK SPECIAL ELECTRICAL MACHINES TWO MARK QUESTIONS 1. What is a synchronous reluctance 2. What are the types of rotor in synchronous reluctance 3. Mention some applications
SEVENTH SEMESTER EEE QUESTION BANK SPECIAL ELECTRICAL MACHINES TWO MARK QUESTIONS 1. What is a synchronous reluctance 2. What are the types of rotor in synchronous reluctance 3. Mention some applications
Technical Explanation for Inverters
 CSM_Inverter_TG_E_1_2 Introduction What Is an Inverter? An inverter controls the frequency of power supplied to an AC motor to control the rotation speed of the motor. Without an inverter, the AC motor
CSM_Inverter_TG_E_1_2 Introduction What Is an Inverter? An inverter controls the frequency of power supplied to an AC motor to control the rotation speed of the motor. Without an inverter, the AC motor
EXPERTS IN MOTION CONTROL I N D U S T R I A L P R O D U C T S
 EXPERTS IN MOTION CONTROL I N D U S T R I A L P R O D U C T S COMPANY-WIDE COMMITMENT TO QUALITY At Globe Motors, we re committed to providing customers with products and services that meet or exceed their
EXPERTS IN MOTION CONTROL I N D U S T R I A L P R O D U C T S COMPANY-WIDE COMMITMENT TO QUALITY At Globe Motors, we re committed to providing customers with products and services that meet or exceed their
ServoRings TM - integrated rotary tables with high torque servo ring motor, high resolution ring encoder and high accuracy ring bearing
 ServoRings TM - integrated rotary tables with high torque servo ring motor, high resolution ring encoder and high accuracy ring bearing Operating principle ServoRing TM rotary tables use segmented three
ServoRings TM - integrated rotary tables with high torque servo ring motor, high resolution ring encoder and high accuracy ring bearing Operating principle ServoRing TM rotary tables use segmented three
Page 1. Design meeting 18/03/2008. By Mohamed KOUJILI
 Page 1 Design meeting 18/03/2008 By Mohamed KOUJILI I. INTRODUCTION II. III. IV. CONSTRUCTION AND OPERATING PRINCIPLE 1. Stator 2. Rotor 3. Hall sensor 4. Theory of operation TORQUE/SPEED CHARACTERISTICS
Page 1 Design meeting 18/03/2008 By Mohamed KOUJILI I. INTRODUCTION II. III. IV. CONSTRUCTION AND OPERATING PRINCIPLE 1. Stator 2. Rotor 3. Hall sensor 4. Theory of operation TORQUE/SPEED CHARACTERISTICS
Permanent Magnet Synchronous Frameless Torque Motors KSO/H Series
 Permanent Magnet Synchronous Frameless Torque Motors KSO/H Series Icpe 313 Splaiul Unirii 030138, Bucureşti, România tel./ fax +40213467233 email servo@icpe.ro web http://www.icpe.ro/ Model Number KSO/H
Permanent Magnet Synchronous Frameless Torque Motors KSO/H Series Icpe 313 Splaiul Unirii 030138, Bucureşti, România tel./ fax +40213467233 email servo@icpe.ro web http://www.icpe.ro/ Model Number KSO/H
Introduction: Drives in Manipulators. Module 3 : Actuators for robots. Lecture 7 : Actuators for Robots-Part I. Objectives
 Module 3 : Actuators for robots Lecture 7 : Actuators for Robots-Part I Objectives In this course you will learn about Commercial or industrial manipulator's capabilities. Typical electrical drives in
Module 3 : Actuators for robots Lecture 7 : Actuators for Robots-Part I Objectives In this course you will learn about Commercial or industrial manipulator's capabilities. Typical electrical drives in
UNIT 2. INTRODUCTION TO DC GENERATOR (Part 1) OBJECTIVES. General Objective
 OBJECTIVES. General Objective") DC GENERATOR (Part 1) E2063/ Unit 2/ 1 UNIT 2 INTRODUCTION TO DC GENERATOR (Part 1) OBJECTIVES General Objective : To apply the basic principle of DC generator, construction principle and types of DC generator.
DC GENERATOR (Part 1) E2063/ Unit 2/ 1 UNIT 2 INTRODUCTION TO DC GENERATOR (Part 1) OBJECTIVES General Objective : To apply the basic principle of DC generator, construction principle and types of DC generator.
Figure 1: Forces Are Equal When Both Their Magnitudes and Directions Are the Same
 Moving and Maneuvering 1 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and
Moving and Maneuvering 1 Cornerstone Electronics Technology and Robotics III (Notes primarily from Underwater Robotics Science Design and Fabrication, an excellent book for the design, fabrication, and
Lower-Loss Technology
 Lower-Loss Technology FOR A STEPPING MOTOR Yasuo Sato (From the Fall 28 Technical Conference of the SMMA. Reprinted with permission of the Small Motor & Motion Association.) Management Summary The demand
Lower-Loss Technology FOR A STEPPING MOTOR Yasuo Sato (From the Fall 28 Technical Conference of the SMMA. Reprinted with permission of the Small Motor & Motion Association.) Management Summary The demand
Chapter 4 DC Machines
 Principles of Electric Machines and Power Electronics Chapter 4 DC Machines Third Edition P. C. Sen Chapter 4 DC machine Electric machine Type: rotating machine Applications: generator (electric source)
Principles of Electric Machines and Power Electronics Chapter 4 DC Machines Third Edition P. C. Sen Chapter 4 DC machine Electric machine Type: rotating machine Applications: generator (electric source)
Pretest Module 21 Units 1-3 AC Generators & Three-Phase Motors
 Pretest Module 21 Units 1-3 AC Generators & Three-Phase Motors 1. What are the two main parts of a three-phase 2. Which part of a three-phase squirrel-cage induction motor is a hollow core? 3. What are
Pretest Module 21 Units 1-3 AC Generators & Three-Phase Motors 1. What are the two main parts of a three-phase 2. Which part of a three-phase squirrel-cage induction motor is a hollow core? 3. What are
EE6351 ELECTRIC DRIVES AND CONTROL UNIT-1 INTRODUTION
 EE6351 ELECTRIC DRIVES AND CONTROL UNIT-1 INTRODUTION 1. What is meant by drive and electric drive? Machines employed for motion control are called drives and may employ any one of the prime movers for
EE6351 ELECTRIC DRIVES AND CONTROL UNIT-1 INTRODUTION 1. What is meant by drive and electric drive? Machines employed for motion control are called drives and may employ any one of the prime movers for
CHAPTER 3 BRUSHLESS DC MOTOR
 53 CHAPTER 3 BRUSHLESS DC MOTOR 3.1 INTRODUCTION The application of motors has spread to all kinds of fields. In order to adopt different applications, various types of motors such as DC motors, induction
53 CHAPTER 3 BRUSHLESS DC MOTOR 3.1 INTRODUCTION The application of motors has spread to all kinds of fields. In order to adopt different applications, various types of motors such as DC motors, induction
Principles of Electrical Engineering
 D.C GENERATORS Principle of operation of D.C machines, types of D.C Generators, e.m.f equation of D.C Generator, O.C.C of a D.C Shunt Generator, Load characteristics of D.C.Generators GENERATOR PRINCIPLE:
D.C GENERATORS Principle of operation of D.C machines, types of D.C Generators, e.m.f equation of D.C Generator, O.C.C of a D.C Shunt Generator, Load characteristics of D.C.Generators GENERATOR PRINCIPLE:
ELECTRICAL MAINTENANCE
 ELECTRICAL MAINTENANCE II PRACTICAL JOURNAL DATA 1 EXPERIMENT NO. 1 AIM: TO FIND VOLTAGE RATIO OF A GIVEN TRANSFORMER. CIRCUIT DIAGRAM: OBSERVATION TABLE: Sr.No. 1 2 3 4 Primary Voltage (V 1 ) Secondary
ELECTRICAL MAINTENANCE II PRACTICAL JOURNAL DATA 1 EXPERIMENT NO. 1 AIM: TO FIND VOLTAGE RATIO OF A GIVEN TRANSFORMER. CIRCUIT DIAGRAM: OBSERVATION TABLE: Sr.No. 1 2 3 4 Primary Voltage (V 1 ) Secondary
Motor Type Selection. maxon s EC 4-pole brushless motors
 Motor Type Selection Parameters that define a motor type are the mechanical output power, the shaft bearing system, the commutation system used, and the possible combinations with gearheads and sensors.
Motor Type Selection Parameters that define a motor type are the mechanical output power, the shaft bearing system, the commutation system used, and the possible combinations with gearheads and sensors.
B.E-EEE(Marine) Batch 7. Subject Code EE1704 Subject Name Special Electrical Machines
 Batch 7. Subject Code EE1704 Subject Name Special Electrical Machines") Course B.E-EEE(Marine) Batch 7 Semester VII Subject Code EE1704 Subject Name Special Electrical Machines Part-A Unit-1 1 List the applications of synchronous reluctance motors. 2 Draw the voltage and torque
Course B.E-EEE(Marine) Batch 7 Semester VII Subject Code EE1704 Subject Name Special Electrical Machines Part-A Unit-1 1 List the applications of synchronous reluctance motors. 2 Draw the voltage and torque
COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK SUBJECT CODE & NAME : EE 1001 SPECIAL ELECTRICAL MACHINES
 KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK SUBJECT CODE & NAME : EE 1001 SPECIAL ELECTRICAL MACHINES YEAR / SEM : IV / VII UNIT I SYNCHRONOUS RELUCTANCE
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING QUESTION BANK SUBJECT CODE & NAME : EE 1001 SPECIAL ELECTRICAL MACHINES YEAR / SEM : IV / VII UNIT I SYNCHRONOUS RELUCTANCE
BMS Series. DC Brushless Torque Motors. Slotless, brushless stator design provides zerocogging torque for unsurpassed velocity control
 BMS Series Rotary Motors BMS Series DC Brushless Torque Motors Slotless, brushless stator design provides zerocogging torque for unsurpassed velocity control Smoother velocity than with standard DC brushtype
BMS Series Rotary Motors BMS Series DC Brushless Torque Motors Slotless, brushless stator design provides zerocogging torque for unsurpassed velocity control Smoother velocity than with standard DC brushtype
DEPARTMENT OF EI ELECTRICAL MACHINE ASSIGNMENT 1
 It is the mark of an educated mind to be able to entertain a thought without accepting it. DEPARTMENT OF EI ELECTRICAL MACHINE ASSIGNMENT 1 1. Explain the Basic concepts of rotating machine. 2. With help
It is the mark of an educated mind to be able to entertain a thought without accepting it. DEPARTMENT OF EI ELECTRICAL MACHINE ASSIGNMENT 1 1. Explain the Basic concepts of rotating machine. 2. With help
Introduction: Electromagnetism:
 This model of both an AC and DC electric motor is easy to assemble and disassemble. The model can also be used to demonstrate both permanent and electromagnetic motors. Everything comes packed in its own
This model of both an AC and DC electric motor is easy to assemble and disassemble. The model can also be used to demonstrate both permanent and electromagnetic motors. Everything comes packed in its own
Measurement and Analysis of the Operation of a Single-Phase Induction Motor
 Measurement and Analysis of the Operation of a Single-Phase Induction Motor In class I have shown you the carcass of a four-pole, single phase, ¼ HP motor in varying stages of disassembly. In this lab,
Measurement and Analysis of the Operation of a Single-Phase Induction Motor In class I have shown you the carcass of a four-pole, single phase, ¼ HP motor in varying stages of disassembly. In this lab,
Design of Brushless Permanent-Magnet Machines. J.R. Hendershot Jr. T.J.E. Miller
 Design of Brushless Permanent-Magnet Machines J.R. Hendershot Jr. T.J.E. Miller Contents 1 GENERAL INTRODUCTION l 1.1 Definitions and types of brushless motor 1 1.2 Commutation,. 4 1.3 Operation of 3-phase
Design of Brushless Permanent-Magnet Machines J.R. Hendershot Jr. T.J.E. Miller Contents 1 GENERAL INTRODUCTION l 1.1 Definitions and types of brushless motor 1 1.2 Commutation,. 4 1.3 Operation of 3-phase
INSTITUTE OF AERONAUTICAL ENGINEERING Dundigal, Hyderabad
 INSTITUTE OF AERONAUTICAL ENGINEERING Dundigal, Hyderabad - 500 043 MECHANICAL ENGINEERING ASSIGNMENT Name : Electrical and Electronics Engineering Code : A40203 Class : II B. Tech I Semester Branch :
INSTITUTE OF AERONAUTICAL ENGINEERING Dundigal, Hyderabad - 500 043 MECHANICAL ENGINEERING ASSIGNMENT Name : Electrical and Electronics Engineering Code : A40203 Class : II B. Tech I Semester Branch :
CONTROL SYSTEM HOW-TO GUIDE. Synchro Transmitter and Receiver
 CONTROL SYSTEM HOW-TO GUIDE Synchro Transmitter and Receiver Contents CONTROL SYSTEM HOW-TO GUIDE... 1 Synchro Transmitter and Receiver... 1 SYNCHRO TRANSMITTER / RECEIVER... 3 INTRODUCTION... 3 SPECIFICATIONS...
CONTROL SYSTEM HOW-TO GUIDE Synchro Transmitter and Receiver Contents CONTROL SYSTEM HOW-TO GUIDE... 1 Synchro Transmitter and Receiver... 1 SYNCHRO TRANSMITTER / RECEIVER... 3 INTRODUCTION... 3 SPECIFICATIONS...
Electrical Machines-I (EE-241) For S.E (EE)
 For S.E (EE)") PRACTICAL WORK BOOK For Academic Session 2013 Electrical Machines-I (EE-241) For S.E (EE) Name: Roll Number: Class: Batch: Department : Semester/Term: NED University of Engineer ing & Technology Electrical
PRACTICAL WORK BOOK For Academic Session 2013 Electrical Machines-I (EE-241) For S.E (EE) Name: Roll Number: Class: Batch: Department : Semester/Term: NED University of Engineer ing & Technology Electrical
SOME FACTORS THAT INFLUENCE THE PERFORMANCE OF
 SOME FACTORS THAT INFLUENCE THE PERFORMANCE OF Authored By: Robert Pulford Jr. and Engineering Team Members Haydon Kerk Motion Solutions There are various parameters to consider when selecting a Rotary
SOME FACTORS THAT INFLUENCE THE PERFORMANCE OF Authored By: Robert Pulford Jr. and Engineering Team Members Haydon Kerk Motion Solutions There are various parameters to consider when selecting a Rotary
CHAPTER 2 BRUSHLESS DC MOTOR
 25 CHAPTER 2 BRUSHLESS DC MOTOR 2.1 INTRODUCTION A motion system based on the DC motor provides a good, simple and efficient solution to satisfy the requirements of a variable speed drive. Although dc
25 CHAPTER 2 BRUSHLESS DC MOTOR 2.1 INTRODUCTION A motion system based on the DC motor provides a good, simple and efficient solution to satisfy the requirements of a variable speed drive. Although dc
ECE 325 Electric Energy System Components 6 Three Phase Induction Motors. Instructor: Kai Sun Fall 2016
 ECE 325 Electric Energy System Components 6 Three Phase Induction Motors Instructor: Kai Sun Fall 2016 1 Content (Materials are from Chapters 13-15) Components and basic principles Selection and application
ECE 325 Electric Energy System Components 6 Three Phase Induction Motors Instructor: Kai Sun Fall 2016 1 Content (Materials are from Chapters 13-15) Components and basic principles Selection and application
Motor Technologies Motor Sizing 101
 Motor Technologies Motor Sizing 101 TN-2003 REV 161221 PURPOSE This technical note addresses basic motor sizing with simple calculations that can be done to generally size any motor application. It will
Motor Technologies Motor Sizing 101 TN-2003 REV 161221 PURPOSE This technical note addresses basic motor sizing with simple calculations that can be done to generally size any motor application. It will
Electromagnetic Induction, Faraday s Experiment
 Electromagnetic Induction, Faraday s Experiment A current can be produced by a changing magnetic field. First shown in an experiment by Michael Faraday A primary coil is connected to a battery. A secondary
Electromagnetic Induction, Faraday s Experiment A current can be produced by a changing magnetic field. First shown in an experiment by Michael Faraday A primary coil is connected to a battery. A secondary
Features & Benefits. Options & Accessories
 Megaflux Frameless Brushless Torque Motors MF0127 Brushless thin-ring component (rotor and stator) torque motor Allied Motion s Megaflux family of brushless torque motors includes 12 series of high performance
Megaflux Frameless Brushless Torque Motors MF0127 Brushless thin-ring component (rotor and stator) torque motor Allied Motion s Megaflux family of brushless torque motors includes 12 series of high performance
Features & Benefits. Options & Accessories
 Megaflux Frameless Brushless Torque Motors MF0076 Brushless thin-ring component (rotor and stator) torque motor Allied Motion s Megaflux family of brushless torque motors includes 12 series of high performance
Megaflux Frameless Brushless Torque Motors MF0076 Brushless thin-ring component (rotor and stator) torque motor Allied Motion s Megaflux family of brushless torque motors includes 12 series of high performance
Features & Benefits. Options & Accessories
 Megaflux Frameless Brushless Torque Motors MF0060 Brushless thin-ring component (rotor and stator) torque motor Allied Motion s Megaflux family of brushless torque motors includes 12 series of high performance
Megaflux Frameless Brushless Torque Motors MF0060 Brushless thin-ring component (rotor and stator) torque motor Allied Motion s Megaflux family of brushless torque motors includes 12 series of high performance
Features & Benefits. Options & Accessories
 Megaflux Frameless Brushless Torque Motors MF0095 Brushless thin-ring component (rotor and stator) torque motor Allied Motion s Megaflux family of brushless torque motors includes 12 series of high performance
Megaflux Frameless Brushless Torque Motors MF0095 Brushless thin-ring component (rotor and stator) torque motor Allied Motion s Megaflux family of brushless torque motors includes 12 series of high performance
2014 ELECTRICAL TECHNOLOGY
 SET - 1 II B. Tech I Semester Regular Examinations, March 2014 ELECTRICAL TECHNOLOGY (Com. to ECE, EIE, BME) Time: 3 hours Max. Marks: 75 Answer any FIVE Questions All Questions carry Equal Marks ~~~~~~~~~~~~~~~~~~~~~~~~~~
SET - 1 II B. Tech I Semester Regular Examinations, March 2014 ELECTRICAL TECHNOLOGY (Com. to ECE, EIE, BME) Time: 3 hours Max. Marks: 75 Answer any FIVE Questions All Questions carry Equal Marks ~~~~~~~~~~~~~~~~~~~~~~~~~~
Step Motor Lower-Loss Technology An Update
 Step Motor Lower-Loss Technology An Update Yatsuo Sato, Oriental Motor Management Summary The demand for stepping motors with high efficiency and low losses has been increasing right along with the existing
Step Motor Lower-Loss Technology An Update Yatsuo Sato, Oriental Motor Management Summary The demand for stepping motors with high efficiency and low losses has been increasing right along with the existing
DHANALAKSHMI COLLEGE OF ENGINEERING MANIMANGALAM. TAMBARAM, CHENNAI B.E. ELECTRICAL AND ELECTRONICS ENGINEERING
 DHANALAKSHMI COLLEGE OF ENGINEERING MANIMANGALAM. TAMBARAM, CHENNAI B.E. ELECTRICAL AND ELECTRONICS ENGINEERING V SEMESTER EE2305 ELECTRICAL MACHINES II LABORATORY LABORATORY MANUAL 1 CONTENT S. No. Name
DHANALAKSHMI COLLEGE OF ENGINEERING MANIMANGALAM. TAMBARAM, CHENNAI B.E. ELECTRICAL AND ELECTRONICS ENGINEERING V SEMESTER EE2305 ELECTRICAL MACHINES II LABORATORY LABORATORY MANUAL 1 CONTENT S. No. Name
Date: Name: ID: LABORATORY EXPERIMENT NO. 8 INDUCTION MOTOR/GENERATOR 8-1
 Date: Name: ID: LABORATORY EXPERIMENT NO. 8 INDUCTION MOTOR/GENERATOR 8-1 OBJECT 1. To determine the general performance of a squirrel motors 2. To observe the characteristics of induction generators.
Date: Name: ID: LABORATORY EXPERIMENT NO. 8 INDUCTION MOTOR/GENERATOR 8-1 OBJECT 1. To determine the general performance of a squirrel motors 2. To observe the characteristics of induction generators.
Spec Information. Reactances Per Unit Ohms
 GENERATOR DATA Selected Model Spec Information Generator Specification Frame: 687 Type: SR4 No. of Bearings: 1 Winding Type: RANDOM WOUND Flywheel: 521.0 Connection: SERIES STAR Housing: 00 Phases: 3 No.
GENERATOR DATA Selected Model Spec Information Generator Specification Frame: 687 Type: SR4 No. of Bearings: 1 Winding Type: RANDOM WOUND Flywheel: 521.0 Connection: SERIES STAR Housing: 00 Phases: 3 No.
Motor Basics AGSM 325 Motors vs Engines
 Motor Basics AGSM 325 Motors vs Engines Motors convert electrical energy to mechanical energy. Engines convert chemical energy to mechanical energy. 1 Motors Advantages Low Initial Cost - $/Hp Simple &
Motor Basics AGSM 325 Motors vs Engines Motors convert electrical energy to mechanical energy. Engines convert chemical energy to mechanical energy. 1 Motors Advantages Low Initial Cost - $/Hp Simple &